BERBASIS MIKROKONTROLER
TUGAS AKHIR
Diajukan Untuk Memenuhi Sebagai Persyaratan Dalam Memperoleh Gelar Sarjana Komputer
Jurusan Teknik Informatika
Oleh :
DWI SUNANTO HARDHIKA. P
0834010171
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
OTOMATISASI PINTU PERLINTASAN KERETA API
MENGGUNAKAN SENSOR WIRELESS INFRA MERAH
BERBASIS MIKROKONTROLER
Disusun Oleh :
DWI SUNANTO HARDHIKA PRATOWO
0834010171
Telah Disetujui Mengikuti Ujian Lisan Periode III Tahun Akademik 2013/2014
Pembimbing I Pembimbing II
Budi Nugroho, S.kom, M.Kom. Chrystia Aji Putra, S.Kom. NPT. 3 8009 05 0205 1 NIP. 386101002961
Mengetahui,
Ketua Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur
OTOMATISASI PINTU PERLINTASAN KERETA API
Telah dipertahankan dan diterima oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur Pada Tanggal 21 Februari 2014
Pembimbing : Tim Penguji :
1. 1.
Budi Nugroho, S.Kom, M.Kom. Basuki Rahmat, S.Si, MT. NPT. 3 8009 05 0205 1 NPT. 3 7006 06 0210 1 2. 2.
Chrystia Aji Putra, S.Kom. Rizky Parlika, S.Kom, M.Kom. NIP. 386101002961 NPT. 3 8405 07 02191
Universitas Pembangunan Nasional ”Veteran” Jawa Timur
FAKULTAS TEKNOLOGI INDUSTRI
Jl. Rungkut Madya Gunung Anyar Surabaya 60294 Tlp. (031) 8706369, 8783189 Fax (031) 8706372 Website: www.upnjatim.ac.id gelombang III, Tahun Ajaran 2013/2014 dengan judul:
“OTOMATISASI PINTU PERLINTASAN KERETA API MENGGUNAKAN SENSOR WIRELESS INFRA MERAH BERBASIS MIKROKONTROLER”.
Oleh karenanya mahasiswa tersebut diatas dinyatakan bebas revisi skripsi dan diijinkan untuk membukukan skripsi dengan judul tersebut.
Surabaya, 18 Mei 2014
Ucapan terima kasih ini saya persembahkan sebagai perwujudan rasa syukur atas terselesaikannya Laporan Skripsi. Ucapan terima kasih ini saya tujukan kepada : 1. Allah SWT., karena berkat Rahmat dan berkahNya kami dapat menyusun dan
menyelesaikan Laporan Skripsi ini hingga selesai.
2. Bapak Prof. Dr. Ir. Teguh Soedarto, MP. selaku Rektor Universitas Pembangunan Nasional “Veteran” Jawa Timur.
3. Bapak Sutiyono, MT. selaku Dekan Fakultas Teknologi Industri UPN “Veteran” Jawa Timur.
4. Ibu Dr. Ir. Ni Ketut Sari, MT. selaku Ketua Jurusan Teknik Informatika UPN “Veteran” Jawa Timur yang telah dengan sabar membimbing dengan segala kerendahan hati dan selalu memberikan kemudahan dan kesempatan bagi saya untuk berkreasi.
5. Ibu Yisti Vita Via. S.ST, M.Kom. Selaku PIA Tugas Akhir Teknik Informatika UPN “Veteran” Jawa Timur.
6. Bapak Budi Nugroho. S.Kom, M.Kom. selaku dosen pembimbing utama pada Proyek Skripsi ini di UPN “Veteran” Jawa Timur yang telah banyak memberikan petunjuk, masukan, bimbingan, dorongan serta kritik yang bermanfaat sejak awal hingga terselesainya skripsi ini.
8. Keluarga tercinta, terutama Bapak Ibuku tersayang, terima kasih atas semua doa, dukungan serta harapan-harapannya pada saat penulis menyelesaikan Skripsi dan laporan ini. Yang penulis minta hanya doa restunya, sehingga penulis bisa membuat sesuatu yang lebih baik dari laporan ini.
Syukur Alhamdulillaahi rabbil ‘alamin terucap ke hadirat Allah SWT
atas segala limpahan Kekuatan-Nya sehingga dengan segala keterbatasan waktu, tenaga, pikiran dan keberuntungan yang dimiliki penyusun, akhirnya penyusun dapat menyelesaikan Skripsi yang berjudul ”Otomatisasi Sistem Palang Pintu Perlintasan Kereta Api Dengan Menggunakan Sensor Wireless Infra Merah Berbasis Mikrokontroler” tepat waktu.
Skripsi dengan beban 4 SKS ini disusun guna diajukan sebagai salah satu syarat untuk menyelesaikan program Strata Satu (S1) pada jurusan Teknik Informatika, Fakultas Teknologi Industri, UPN ”VETERAN” Jawa Timur.
Melalui Skripsi ini penyusun merasa mendapatkan kesempatan emas untuk memperdalam ilmu pengetahuan yang diperoleh selama di bangku perkuliahan, terutama berkenaan tentang penerapan teknologi perangkat bergerak. Namun, penyusun menyadari bahwa Skripsi ini masih jauh dari sempurna. Oleh karena itu penyusun sangat mengharapkan saran dan kritik dari para pembaca untuk pengembangan aplikasi lebih lanjut.
Surabaya, Januari 2014
Halaman
2.2.9 Karakteristik Fisik... 18
2.8.1 Kerusakan Pada Adaptor dan Cara Memperbaikinya... 31
BAB III ANALISIS DAN PERANCANGAN SISTEM ... 33
3.1 Analisis Sistem ... 33
3.2 Perancangan Perangkat Lunak ... 34
3.2.1 Perancangan Perangkat Lunak Untuk PC ... 34
3.9 Diagram Alur Pemrograman... 41
BAB IV HASIL DAN PEMBAHASAN ... 47
4.1 Alat Yang Digunakan ... 47
4.2 Prosedur Pembuatan Program ... 48
4.2.1 Instalasi Driver Arduino 1.0.5 for Windows... 48
4.2.2 Instalasi Port USB ke Dalam PC... 51
4.2.3 Menjalankan Aplikasi Arduino... 56
4.3 Implementasi Coding…... 59
4.4 Analisis Dan Pengujian Hardware... 64
4.5.1 Pengujian Rangkaian Sensor Infra Merah ... 64
4.5.2 Pengujian Rangkaian Motor Servo Dan Buzzer Alarm ... 65
4.5.3 Pengujian Alat Standby ... 66
4.5.4 Pengujian sensor infra merah 1 dan 2 ketika mendapatkan inputan serta pengiriman data dari transceiver menuju receiver untuk membunyikan buzzer alarm serta menjalankan motor servo untuk menutup palang pintu ... 67
4.5.5 Pengujian sensor infra merah 3 dan 4 ketika proses delay sedang berjalan dan mematikan buzzer alarm serta menjalankan motor servo untuk membuka palang pintu setelah waktu delay sudah berakhir ... 69
4.6 Analisis Hasil Percobaan... 71
4.7 Validasi Uji Coba Dengan Metode Kappa Cohen ... 72
BAB V PENUTUP ... 75
6.1 Kesimpulan ... 75
6.2 Saran ... 75
Pembimbing 1 : Budi Nugroho. S.Kom, M.Kom Pembimbing 2 : Crhystia Aji Putra. S.Kom Penyusun : Dwi Sunanto Hardhika Pratowo
ABSTRAK
Perkembangan teknologi saat ini merambah semakin luas dengan ditunjang perpaduan teknologi mikrokontroler, oleh sebab itu dapat mempengaruhi masyarakat luas dalam menggunakan suatu alat yang canggih dan itu menunjukkan suatu efisiensi dalam penggunaannya. Kepraktisan teknologi dalam perkembangan tersebut sangat mempengaruhi kebutuhan manusia untuk membuat suatu alat yang berfungsi sebagai pengontrolan keamanan palang pintu perlintasan kereta api tanpa membutuhkan tenaga penjaga lintasan untuk membuka dan menutupnya sebelum dan sesudah kereta api melintas.
Untuk itu dibuatlah suatu sistem pengontrolan secara otomatis pada palang pintu perlintasan kereta api dengan menggunakan sensor wireless infa merah berbasis mikrokontroler dimana dapat memudahkan palang pintu tersebut untuk membuka dan menutup hanya dengan menerima data dari sensor yang dikirimkan melalui gelombang radio tanpa menekan tombol dari seorang penjaga. Pada sistem tersebut menggunakan mikrokontroler Arduino Uno Atmega328 sebagai pengontrol
sistemnya serta menggunakan pemrograman Bahasa C serta sensor infra merah sebagai penangkap gerakan dan RF Transceiver Shield sebagai pemancar pengirim
data menuju mikrokontrolernya.
Alat ini dapat berjalan apabila kedua sensor transceiver yang terpasang
mendapatkan inputan/terhalang oleh kereta api yang melintas yang kemudian inputan tersebut akan di proses kedalam minimum sistem untuk dikirimkan menuju mikrokontroler receiver dengan menggunakan sinyal wireless untuk membunyikan buzzer alarm sebagai peringatan dini datangnya kereta api serta menjalankan motor
servo untuk menutup palang pintu perlintasan tersebut. Kemudian terdapat dua rangkaian sensor infra merah lain yang berfungsi sebagai inputan jika kedua sensor tersebut terhalang maka akan melakukan proses untuk mematikan buzzer alarm dan
menjalankan motor servo untuk membuka palang pintu perlintasan tersebut.
Kata Kunci : Mikrokontroler, Arduino Uno Atmega328, Bahasa C, Sensor infra
PENDAHULUAN
1.1 Latar Belakang
Teknologi adalah cara untuk mendapatkan suatu kualitas yang lebih baik, lebih murah, lebih cepat, lebih mudah dan lebih menyenangkan. Salah satu teknologi yang berkembang pesat saat ini adalah teknologi dibidang mikrokontroler. Dalam perkembangan zaman di era globalisasi untuk saat ini sekarang kemajuan teknologi sangat berkembang dan itu menunjukkan suatu efisiensi dalam penggunaannya. Kepraktisan teknologi dalam perkembangan tersebut sangat mempengaruhi kebutuhan manusia untuk membuat suatu alat yang berfungsi sebagai pengontrolan keamanan perlintasan kereta api tanpa membutuhkan tenaga penjaga untuk membuka dan menutupnya.
Pada saat ini, keamanan dalam berbagai perlintasan sangat perlu ditingkatkan terutama pada wilayah padat penduduk, dimana pengontrolan palang pintu perlintasan masih menggunakan sistem manual yaitu dengan tenaga manusia. Pengontrolan keamanan perlintasan kereta api yang banyak dijumpai saat ini yaitu dengan menekan suatu tombol untuk membuka dan menutupnya masih mengandalkan tenaga manusia dan tidak secara otomatis. Untuk itulah dikembangkan suatu alat yang dapat digunakan sebagai pengontrolan keamanan palang pintu perlintasan kereta api secara otomatis. (PT. Kereta Api Indonesia
Dengan adanya sistem keamanan perlintasan kereta api secara otomatis maka dapat mengurangi angka kecelakaan yang melibatkan antara kereta api dan pengguna jalan, sistem perlintasan otomatis kali ini menggunakan Mikrokontroler ATMega 328 sebagai pemroses kontrol hardware. Sensor yang digunakan adalah sensor infra
merah sehingga pada saat kereta melintas, sensor akan mendeteksi objek yang bergerak.
Teknologi sinyal wireless diterapkan pada sistem aplikasi ini sebagai pengirim data dari sensor menuju mikrokontroler karena sinyal wireless merupakan salah satu media komunikasi yang telah berkembang secara luas yang digunakan oleh masyarakat baik dalam jarak dekat maupun jarak jauh yaitu melalui antena. Saat ini sinyal wireless merupakan suatu alat yang menjadi kebutuhan bahkan mempengaruhi perilaku dan budaya masyarakat seakan sinyal wireless menjadi kebutuhan penting yang wajib digunakan. Penggunakan sinyal wireless yang paling banyak digunakan oleh masyarakat saat ini adalah sebagai pengirim data, karena pengunaan sinyal wireless biayanya lebih murah dan bisa bersifat pribadi serta bisa digunakan untuk umum. Bila menghubungkan permasalahan yang telah dikemukakan pada awal fungsi dari sinyal wireless yang dapat digunakan untuk mengirim data dapat juga digunakan sebagai penghubung dengan alat yang disetting sebelumnya, maka dapat
dipangkas waktu yang semaksimal mungkin dan seefisien mungkin. Dengan pemakaian sinyal wireless tersebut maka dapat dikembangkan fungsi dari penerima (receiver) yang dihubungkan dengan pintu perlintasan agar dapat bekerja secara
wireless sebagai hardware tambahan pengirim data dan sebuah mikrokontroler yang
terhubung dengan motor servo sebagai penggerak palang pintu perlintasannya.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang diuraikan diatas, maka perlu dirumuskan masalah, antara lain :
a. Bagaimana merancang dan membuat alat simulasi perlintasan kereta api secara otomatis dengan menggunakan sensor wireless infra merah.
b. Bagaimana merancang dan membuat program untuk menjadi alat simulasi yang dapat mendeteksi pergerakan kereta api dengan sinyal wireless sebagai pengirim data.
c. Bagaimana melakukan uji coba sensor infra merah sebagai penangkap gerakan kereta api serta sinyal wireless sebagai pengirim data.
1.3 Tujuan Penelitian
1.4 Manfaat Penelitian
Adanya Tugas Akhir ini diharapkan dapat bermanfaat, antara lain : a. Mengetahui dan mempelajari cara kerja sensor infra merah.
b. Memanfaatkan sinyal wireless sebagai pengirim data.
c. Mempermudah cara kerja palang pintu perlintasan saat kereta api akan melintas. d. Meningkatkan ilmu pengetahuan dan teknologi tentang alat simulasi dengan
sensor infra merah.
1.5 Batasan Masalah
Pada penelitian ini, memiliki suatu batasan masalah diantaranya :
a. Alat ini menggunakan sensor infra merah sebagai penangkap pergerakan kereta api.
b. Alat ini menggunakan sinyal wireless sebagai pengirim data. c. Mikrokontroler yang digunakan adalah Atmega328.
d. Bahasa pemrograman yang digunakan pada mikrokontroler adalah bahasa C.
1.6 Metodologi Penelitian
Pada perancangan dan pembuatan otomatisasi sistem palang pintu perlintasan kereta api dengan sensor wireless infra merah berbasis mikrokontroler, maka metodologi yang digunakan adalah sebagai berikut :
a. Study Literatur yang dipergunakan untuk mempelajari dasar teori yang berhubungan dengan topic pembahasan.
c. Analisa peralatan. d. Pengujian alat. e. Penulisan hasil ujian.
1.7 Sistematika Penulisan
Sistematika pembahasan penulisan Tugas Akhir ini tersusun atas : BAB I : PENDAHULUAN
Bab ini menjelaskan tentang latar belakang, rumusan masalah, batasan masalah, tujuan, manfaat, metodologi penelitian dan sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Pada bab ini dijelaskan tentang teori-teori serta penjelasan-penjelasan yang dibutuhkan dalam pembuatan otomatisasi sistem palang pintu perlintasan kereta api dengan sensor wireless infra merah.
BAB III : ANALISIS DAN PERANCANGAN SISTEM
BAB IV : IMPLEMENTASI SISTEM
Bab ini berisi penjelasan hasil Tugas Akhir serta pembahasan tentang otomatisasi sistem palang pintu perlintasan kereta api dengan sensor wireless infra merah.
BAB V : UJI COBA DAN EVALUASI SISTEM
Bab ini berisi pengujian program Tugas Akhir.
BAB VI : PENUTUP
Bab ini berisi kesimpulan dan saran-saran penulis mengenai Tugas Akhir yang disusun.
DAFTAR PUSTAKA
TINJAUAN PUSTAKA
Pada bab ini dibahas mengenai teori penunjang dari peralatan yang digunakan dalam sistem mikrokontroler ATmega328, sensor infra merah, RF
transceiver shiled, DT proto header shield, buzzer alarm dan motor servo.
2.1 Gambaran Umum Mikrokontroler
Mikrokontroler merupakan suatu IC yang didalamnya berisi CPU, ROM, RAM
dan I/O. Dengan adanya CPU tersebut maka mikrokontroler dapat melakukan proses
berfikir berdasarkan program yang telah diberikan kepadanya. Mikrokontroler banyak terdapat pada peralatan elektronik yang serba otomatis, mesin fax dan peralatan elektronik lainya. Mikrokontroler dapat disebut pula sebagai komputer yang berukuran kecil yang berdaya rendah sehingga sebuah baterai dapat memberikan daya. Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat pada gambar di bawah ini : (Sahabat Informasi, 2012)
Pada gambar tersebut tampak suatu mikrokontroler standart yang tersusun atas komponen-komponen sebagai berikut :
a. Central Processing Unit (CPU)
CPU merupakan bagian utama dalam suatu mikrokontroler. CPU pada
mikrokontroler ada yang berukuran 8 bit ada pula yang berukuran 16 bit. CPU
ini akan membaca program yang tersimpan didalam ROM dan
melaksanakannya.
b. Read Only Memory (ROM)
ROM merupakan suatu memori (alat untuk mengingat) yang sifatnya hanya
dibaca saja. Dengan demikian ROM tidak dapat ditulisi. Dalam dunia
mikrokontroler ROM digunakan untuk menyimpan program bagi mikrokontroler
tersebut. Program tersimpan dalam format biner (‘0’ atau ‘1’). Susunan bilangan biner tersebut bila telah terbaca oleh mikrokontroler akan memiliki arti tersendiri.
c. Random Acces Memory (RAM)
Berbeda dengan ROM, RAM adalah jenis memori selain dapat dibaca juga dapat
ditulis berulang kali. Tentunya dalam pemakaian mikrokontroler ada semacam data yang bisa berubah pada saat mikrokontroler tersebut bekerja. Perubahan data tersebut tentunya juga akan tersimpan kedalam memori. Isi pada RAM akan
hilang jika catu daya listrik hilang. d. Input / Output (I/O)
e. Komponen lainnya
Beberapa mikrokontroler memiliki timer / counter, ADC (Analog to Digital
Conventer), dan komponen lainnya. Pemilihan komponen tambahan yang sesuai
dengan tugas mikrokontroler akan sangat membantu perancangan sehingga dapat mempertahankan ukuran yang kecil. Apabila komponen-komponen tersebut belum ada pada suatu mikrokontroler, umumnya komponen tersebut masih dapat ditambahkan pada sistem mikrokontroler melalui port-portnya.
(Sahabat Informasi, 2012)
2.2 Mikrokontroler Arduino Uno ATmega328
Arduino Uno adalah sebuah board mikrokontroler yang didasarkan pada ATmega328 (datasheet). Arduino Uno mempunyai 14 pin digital input / output (6
di-antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator
Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan
sebuat tombol reset. Arduino Uno memuat semua yang dibutuhkan untuk menunjang
mikrokontroler, mudah menghubungkannya ke sebuah komputer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan
baterai untuk memulainya. Arduino Uno berbeda dari semua board Arduino
sebelumnya, Arduino Uno tidak menggunakan chip driver FTDI USB-to-serial.
Sebaliknya, fitur-fitur Atmega16U2 (Atmega8U2 sampai ke versi R2) diprogram
sebagai sebuah pengubah USB ke serial. Revisi 2 dari board Arduino Uno
membuatnya lebih mudah untuk diletakkan ke dalam DFU mode. Revisi 3 dari
boardArduino Uno memiliki fitur-fitur baru sebagai berikut :
a. Pinout 1.0 ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin
baru lainnya yang diletakkan dekat dengan pin reset, IOREF yang
memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan
dari board. Untuk ke depannya, shield akan dijadikan kompatibel / cocok
dengan board yang menggunakan AVR yang beroperasi dengan tegangan 5V
dan dengan Arduino Due yang beroperasi dengan tegangan 3.3V. Yang kedua
ini merupakan sebuah pin yang tak terhubung, yang disediakan untuk tujuan kedepannya.
b. Sirkuit reset yang lebih kuat.
c. Atmega 16U2 menggantikan 8U2. (Sahabat Informasi, 2012)
2.2.1 Ringkasan Mikrokontroler ATmega328
Arduino Uno adalah sebuah seri terakhir dari board Arduino USB dan model
referensi untuk papan Arduino, untuk suatu perbandingan dengan versi sebelumnya,
lihat indeks dari board Arduino di bawah ini : (Sahabat Informasi, 2012)
Tabel 2.1 Ringkasan Mikrokontroler Atmega328
Mikrokontroler ATmega328
Tegangan pengoperasian 5V
Tegangan input yang disarankan 7-12V
Batas tegangan input 6-20V
Jumlah pin I/O digital 14 (6 di antaranya menyediakan keluaran PWM)
Jumlah pin input analog 6
Arus DC tiap pin I/O 40 mA
Arus DC untuk pin 3.3V 50 mA
Memori Flash 32 KB (ATmega328), sekitar 0.5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
sebagai referensi. Konfigurasi pin identik pada semua ketiga prosesor tersebut.
(Sahabat Informasi, 2012)
2.2.2 Daya (Power)
Arduino Uno dapat disuplai melalui koneksi USB atau dengan sebuah power
suplai eksternal. Sumber daya dipilih secara otomatis. Suplai eksternal (non-USB)
dapat diperoleh dari sebuah adaptor AC ke DC atau baterai. Adaptor dapat
dihubungkan dengan mencolokkan sebuah center-positive plug yang panjangnya
2,1mm ke power jack dari board. Kabel lead dari sebuah baterai dapat dimasukkan
dalam header / kepala pin Ground (Gnd) dan pin vin dari konektor power.
Board Arduino Uno dapat beroperasi pada sebuah suplai eksternal 6 sampai 20
Volt. Jika disuplai dengan yang lebih kecil dari 7 Volt, kiranya pin 5 Volt mungkin mensuplai kecil dari 5 Volt dan board Arduino Uno bisa menjadi tidak stabil. Jika
menggunakan suplai yang lebih dari besar 12 Volt, voltage regulator bisa kelebihan
panas dan membahayakan board Arduino Uno. Range yang direkomendasikan
adalah 7 sampai 12 Volt.
Pin-pin dayanya adalah sebagai berikut:
a. VIN : Tegangan input ke Arduino board ketika board sedang menggunakan
sumber suplai eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga
lainnya yang diatur). Kita dapat menyuplai tegangan melalui pin ini, atau jika penyuplaian tegangan melalui power jack, aksesnya melalui pin ini.
b. 5V : Pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada
(7-12V), USB connector (5V), atau pin VIN dari board (7-12). Penyuplaian
tegangan melalui pin 5V atau 3,3V mem-bypass regulator, dan dapat
membahayakan board. Hal itu tidak dianjurkan.
c. 3V3 : Sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus
maksimum yang dapat dilalui adalah 50 mA.
d. GND : Adalah pin ground. (Sahabat Informasi, 2012)
2.2.3 Memori
ATmega328 mempunyai 32 KB (dengan 0,5 KB digunakan untuk bootloader). ATmega328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM (yang dapat dibaca
dan ditulis (RW / read and written) dengan EEPROM library). (Sahabat Informasi,
2012)
(terputus secara default) 20-50 kOhm. Selain itu, beberapa pin mempunyai
fungsi-fungsi spesial :
a. Serial: 0 (RX) dan 1 (TX) : Digunakan untuk menerima (RX) dan memancarkan
(TX) serial data TTL (Transistor-Transistor Logic). Kedua pin ini dihubungkan
b. External Interrupts 2 dan 3 : Pin-pin ini dapat dikonfigurasikan untuk dipicu
sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan atau
penurunan yang besar, atau suatu perubahan nilai. PWM: 3, 5, 6, 9, 10, dan 11.
Memberikan 8-bit PWM output dengan fungsi analog Write.
c. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) : Pin-pin ini men-support
komunikasi SPI menggunakan SPIlibrary.
d. LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13. Ketika
pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
Arduino Uno mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya
memberikan 10 bit resolusi (contohnya 1024 nilai yang berbeda). Secara default, 6
input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu
mungkin untuk mengganti batas atas dari range-nya dengan menggunakan pin AREF
dan fungsi analog Reference. Di sisi lain, beberapa pin mempunyai fungsi spesial :
a. TWI pin A4 atau SDA dan pin A5 atau SCL : Men-support komunikasi TWI
dengan menggunakan Wire library.
b. AREF : Referensi tegangan untuk input analog. Digunakan dengan analog
Reference.
c. Reset : Membawa saluran LOW untuk mereset mikrokontroler. Secara khusus,
digunakan untuk menambahkan sebuah tombol reset untuk melindungi yang mem-block sesuatu pada board. (Sahabat Informasi, 2012)
2.2.5 Komunikasi
Arduino Uno mempunyai sejumlah fasilitas untuk komunikasi dengan sebuah
serial komunikasi UARTTTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX).
Sebuah Atmega 16U2 pada channel board serial komunikasinya melalui USB dan
muncul sebagai sebuah port virtual ke software pada komputer. Firmware 16U2
menggunakan driver USB COM standar, dan tidak ada driver eksternal yang
dibutuhkan. Bagaimanapun, pada Windows, sebuah file inf pasti dibutuhkan.
Software Arduino mencakup sebuah serial monitor yang memungkinkan data
tekstual terkirim ke dan dari board Arduino. LED RX dan TX pada board akan
menyala ketika data sedang ditransmit melalui chip USB-to-serial dan koneksi USB
pada komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah software serial library memungkinkan untuk komunikasi serial pada
beberapa pin digital Uno. Atmega328 juga men-support komunikasi I2C (TWI) dan
SPI. Software Arduino mencakup sebuah Wire library untuk memudahkan
menggunakan bus I2C. Untuk komunikasi SPI, gunakan SPI library. (Sahabat
Informasi, 2012)
2.2.6 Programming
ATmega328 pada Arduino Uno hadir dengan sebuah bootloader yang
memungkinkan kita untuk meng-upload kode baru ke ATmega328 tanpa
menggunakan pemrogram hardware eksternal. ATmega328 berkomunikasi
menggunakan protokol STK500 (file C header). Kita juga dapat mem-bypass
revisi 1 dan revisi 2) tersedia. ATmega16U2 / 8U2 diload dengan sebuah bootloader
DFU, yang dapat diaktifkan dengan :
Pada board Revisi 1 : Dengan menghubungkan jumper solder pada belakang board
dan kemudian mereset 8U2.
a. Pada board Revisi 2 : atau setelahnya ada sebuah resistor yang menarik garis
HWB 8U2 / 16U2 ke ground, dengan itu dapat lebih mudah untuk meletakkan ke
dalam mode DFU. Kita dapat menggunakan software Atmel’s FLIP (Windows)
atau pemrogram DFU (Mac OS X dan Linux) untuk men-load sebuah firmware
baru. Atau kita dapat menggunakan header ISP dengan sebuah pemrogram
eksternal (meng-overwritebootloaderDFU). (Sahabat Informasi, 2012)
2.2.7 Reset Otomatis (Software)
Dari pada mengharuskan sebuah penekanan fisik dari tombol reset sebelum sebuah peng-upload-an, Arduino Uno didesain pada sebuah cara yang
memungkinkannya untuk direset dengan software yang sedang berjalan pada pada
komputer yang sedang terhubung. Salah satu garis kontrol aliran hardware (DTR)
dari ATmega8U2 / 16U2 dihubungkan ke garis reset dari ATmega328 melalui sebuah
kapasitor 100 nanofarad. Ketika saluran ini dipaksakan, garis reset jatuh cukup
panjang untuk mereset chip. Software Arduino menggunakan kemampuan ini untuk
memungkinkan kita untuk meng-upload kode dengan mudah menekan tombol
upload di software Arduino. Ini berarti bahwa bootloader dapat mempunyai sebuah
koordinasi yang baik dengan memulai peng-upload-an. Pengaturan ini mempunyai
implikasi. Ketika Arduino Uno dihubungkan ke sebuah komputer lain yang sedang
running menggunakan OS Mac X atau Linux, Arduino Uno mereset setiap kali
sebuah koneksi dibuat dari software (melalui USB). Untuk berikutnya, setengah
detik atau lebih, bootloader sedang berjalan pada Arduino Uno. Ketika Arduino Uno
diprogram untuk mengabaikan data yang cacat / salah (contohnya apa saja selain sebuah peng-upload-an kode baru) untuk menahan beberapa bit pertama dari data
yang dikirim ke board setelah sebuah koneksi dibuka. Jika sebuah sketch sedang
berjalan pada board menerima satu kali konfigurasi atau data lain ketika sketch
pertama mulai, memastikan bahwa software yang berkomunikasi menunggu satu
detik setelah membuka koneksi dan sebelum mengirim data ini. Arduino Uno
berisikan sebuah jejak yang dapat dihapus untuk mencegah reset otomatis. Pad pada salah satu sisi dari jejak dapat disolder bersama untuk mengaktifkan kembali. Pad itu diberi label “RESET-RN” Kita juga dapat menonaktifkan reset otomatis dengan
menghubungkan sebuah resistor 110 ohm dari tegangan 5V ke garis reset. (Sahabat
Informasi, 2012)
2.2.8 Proteksi Arus lebih USB
Arduino Uno mempunyai sebuah sebuah sekring reset yang memproteksi port USB komputer dari hubungan pendek dan arus lebih. Walaupun sebagian besar
komputer menyediakan proteksi internal sendiri, sekring menyediakan sebuah proteksi tambahan. Jika lebih dari 500 mA diterima port USB, sekring secara
2.2.9 Karakteristik Fisik
Panjang dan lebar maksimum dari PCB Arduino Uno masing-masingnya
adalah 2.7 dan 2.1 inci, dengan konektor USB dan power jack yang memperluas
dimensinya. Empat lubang sekrup memungkinkan board untuk dipasangkan ke
sebuah permukaan atau kotak. Sebagai catatan, bahwa jarak antara pin digital 7 dan 8 adalah 160 mil. (0.16"), bukan sebuah kelipatan genap dari jarak 100 mil dari pin lainnya. (Sahabat Informasi, 2012)
2.3 EMS (Embedded Module Series) RF Transceiver Shield
EMS RF Transceiver Shield merupakan modul Shield Arduino compatible
yang dapat digunakan untuk transmisi data secara wireless. EMS RF Transceiver
Shield didesain sebagai modul add-on untuk DT-AVR Inoduino. Proses instalasi
dapat dilakukan dengan mudah tanpa harus menggunakan kabel jumper. Selain
DT-AVR Inoduino, dengan memperhatikan alokasi pinout, modul ini dapat digunakan
bersama dengan boardArduino ataupun Arduinocompatible lainnya.
EMS RF Transceiver Shield dirancang berbasiskan modul RF RFM12S 433MHz,
yaitu modul komunikasi wirelessdengan frekuensi 433 MHz serta jarak komunikasi yang mencapai 150 meter. RFM12S 433MHz menggunakan antarmuka SPI untuk
pengaksesannya oleh berbagai modul kontroler. EMS RF Transceiver Shield cocok
digunakan pada aplikasi kontrol jarak jauh, sistem telemetri, ataupun aplikasi-aplikasi lainnya dimana instalasi kabel sulit untuk dilakukan.
2.3.1 Spesifikasi dan Tata Letak
1. Menggunakan RFM12S 433MHz, antarmuka SPI.
2. Membutuhkan catu daya untuk modul: 5 VDC. (Innovative Electronics, 2012)
Gambar 2.4 Pin dan Gambar ISPHeader EMS Transceiver Shield
Gambar 2.5 Pin Other I/O (J6)
jika ingin digunakan. Sedangkan Antenna Pad (J5) dapat dihubungkan dengan antena kreasi sendiri. (Innovative Electronics, 2012)
2.4 Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali
dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor
servo posisi putaran sumbu dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada dalam motor servo. Motor servo disusun dari sebuah motor DC,
gearbox, variabel resistor (VR) atau potensioner dan rangkaian kontrol. Potensioner
berfungsi untuk menentukan batas maksimum putaran sumbu motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulse yang pada
pin kontrol motor servo. Motor servo mampu bekerja dua arah (CW dan CCW)
dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulse(duty cycle) sinyal PWM pada bagian pin kontrolnya. (Elektronika
Dasar, 2012)
2.4.1 Jenis Motor Servo
a. Motor Servo Standart 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan
defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan-tengah-kiri adalah 180°.
b. Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan
defleksi sudut putar (dapat berputar secara kontinyu). (Elektronika Dasar, 2012)
2.4.2 Pulse Kontrol Motor Servo
Operasional motor servo dikendalikan oleh sebuah pulse selebar ±20 ms,
dimana lebar pulse antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut
maksimum. Apabila motor servo diberikan pulse dengan besar 1.5 ms mencapai
gerakan 90°, maka bila kita berikan pulse kurang dari 1.5 ms maka posisi mendekati
0° dan bila kita berikan pulse lebih dari 1.5 ms maka posisi mendekati 180°.
(Elektronika Dasar, 2012)
Motor servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan
frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari
motor akan berhenti tepat di tengah-tengah (sudut 0° / netral). Pada saat Ton duty
cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke
berlawanan arah jarum jam (counter clock wise / CCW) dengan membentuk sudut
yang besarnya linier terhadap besarnya Ton duty cycle, dan sebaliknya, jika Ton duty
cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah
jarum jam (clock wise / CW) dengan membentuk sudut yang linier pula terhadap
besarnya Ton duty cycle, dan bertahan diposisi tersebut. (Elektronika Dasar, 2012)
2.5 Sensor LED Infra Merah
Sensor LED infra merah merupakan satu jenis LED (Light Emiting Diode)
yang dapat memancarkan cahaya infra merah yang tidak kasat mata. Cahaya infra merah merupakan gelombang cahaya yang berada pada spectrum cahaya tak kasat mata. LED infra merah dapat memancarkan cahaya infra merah pada saat diode LED
ini diberikan tegangan bias maju pada anoda dan katodanya. LED infra merah ini
dapat memancarkan gelombang cahaya infra merah karena dibuat dengan bahan khusus memendarkan cahaya infra merah. Bahan pembuatan LED infra merah
tersebut adalah bahan Galium Arsenida (GaAs). Secara teoritis LED infra merah
Semakin besar arus yang mengalir maka semakin besar daya pancarnya dan semakin jauh jarak sapuannya.
Cahaya infra merah tidak mudah terkontaminasi atau teresonan dengan cahaya lain, sehingga dapat digunakan baik siang maupun malam. Aplikasi dari LED
infra merah ini dapat digunakan sebagai transmiter remote control maupun sebagai
line detector pada pintu gerbang maupun sebagai sensor robot. Aplikasi cahaya infra
merah sendiri dapat digunakan sebagai link pada jaringan telekomunikasi atau dapat
juga dipancarkan pada fiber optic. Sebagai receiver cahaya infra merah dapat
digunakan foto dioda, foto transistor maupun modul receiver infra merah.
(Elektronika Dasar, 2012)
Gambar 2.8 LED Infra Merah
2.6 Buzzzer Alarm
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah
getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir
pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan
sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm). (Indraharja, 2012)
Gambar 2.9 Buzzer Alarm
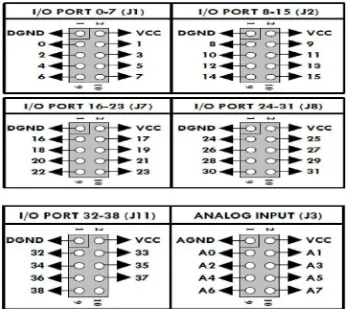
2.7 DT Proto Header Shield
DT Proto Header Shield merupakan sebuah modul add-on untuk DT-AVR Inoduino. Modul ini juga mendukung Arduino Uno dan Arduino Mega, modul ini
adalah modul adapter untuk mengubah tata letak pin input / output DT-AVR
Inoduino agar kompatibel dengan produk-produk lain yang menggunakan antara
Gambar 2.10 Pin Other I/O DT Proto Header Shiled
Gambar 2.12 DT Proto Header Shield
ISP HEADER (J5 dan J13) berfungsi sebagai jalur pemrograman secara ISP. J5
dapat dihubungkan ke modul DT-AVR Inoduino sedangkan J13 dapat diberi header
untuk dihubungkan ke ISP programmer. Tidak disarankan memprogram secara ISP
melalui ISP HEADER. Jika modul diprogram ulang secara ISP, maka bootloader
akan terhapus. (Innovative Electronics, 2012)
2.8 AC / DC Adaptor (Power Supply)
Adaptor (power supply) membutuhkan sumber daya listrik bisa kita peroleh
dari berbagai sumber misalnya baterai, solar sel, generator AC / DC, dan jala-jala
listrik PLN. Adaptor (Power Supply) merupakan sumber tegangan DC. Sumber
tegangan DC ini dibutuhkan oleh berbagai macam rangkaian elektronika untuk dapat
dioperasikan. Rangkaian inti dari catu daya (power supply) ini adalah suatu
rangkaian penyearah yaitu rangkaian yang mengubah sinyal bolak-balik (AC)
menjadi sinyal searah (DC). Proses pengubahan dimulai dari penyearahan oleh
diode, penghalusan tegangan kerut (Ripple Voltage Filter) dengan menggunakan
pengubahan tingkat tegangan atau arus. Pada teknik regulasi pada pembuatan catu daya, kita mengenal teknik regulasi daya linier dan teknik regulasi switching. (Moch
Duro, 2012)
Gambar 2.13 Macam-macam Adaptor
Sistem rangkaian penyearah ada 4 fungsi dasar yaitu :
a. Tranformasi (travo) tegangan yang diperlukan untuk menurunkan tegangan yang
diinginkan.
b. Rangkaian penyearah, rangkaian ini untuk mengubah tingkat tegangan arus bolak balik ke arus searah.
c. Filter (Condesator), merupakan rangkaian untuk memproses fluktuasi
penyearahan yang menghasilkan keluaran tegangan DC yang lebih rata.
Gambar 2.14 Kontruksi Dasar Adaptor Dengan Transformator Step Down
Pada teknologi modern saat ini adaptor (power supply) rata-rata sudah tidak
lagi menggunakan transformator step down, dimana tegangan AC diturunkan
terlebih dahulu melalui sebuah transformator step down lalu keluaran trafo
disearahkan dengan dioda dan diratakan dengan kapasitor elektrolit (elco). (Moch
Duro, 2012)
Gambar 2.15 Rangkaian Dasar Catu Daya Sistem Switching
Adaptor (power supply) sekarang umumnya menggunakan sistem switching,
sinyal AC dari tegangan jala-jala listrik 220V disearahkan lebih dahulu menjadi
hasil penyearahan ini kemudian disaklar on-off secara terus menerus dengan
frekuensi tertentu sehingga memungkinkan nilai induktor dari trafo menjadi kecil. Hal ini khususnya untuk memperkecil ukuran power supply. Di dalam penggunaan
adaptor ada yang memakai trafo CT biasanya digunakan untuk rangkaian catu daya
amplifier atau speaker aktif. Dan ada pula yang memakai trafo switching biasanya
digunakan untuk adaptor charger handphone. Di dalam penggunaan adaptor kita
juga harus memperhatikan kondisi adaptor, apakah adaptor itu berfungsi dengan baik atau tidak. Adaptor dengan kondisi yang baik dapat mengoptimalkan kinerja adaptor serta mengurangi dampak konsleting pada adaptor. Adaptor yang sering dibersihkan dan dirawat memiliki ketahanan dan kemampuan yang maksimal. Dengan begitu kita harus tahu cara pemeliharaan adaptor yang baik dan benar karena adaptor yang sering dirawat akan lebih tahan lama dalam penggunaannya.
Berikut adalah cara pemeliharaan adaptor :
a. Membersihkan adaptor dari debu.
Cara yang tepat untuk membersihkan adaptor dari debu adalah dengan menggunakan kain basah serta jangan lupa untuk mencabut body adaptor dari
rangkaian, lalu lap secara merata sampai ke ujung-ujung body adaptor dan untuk
membersihkan jack (pelatuk) adaptor gunakan kain kering.
b. Membersihkan rangkaian adaptor.
dari debu dan bersihkan secara merata dengan menggosokkan secara perlahan-lahan.
c. Hindari adaptor dari tempat yang lembab dan berair.
Menghindari adaptor dari tempat yang lembab dan berair adalah cara yang tepat dalam pemeliharaan adaptor karena apabila adaptor ditaruh di tempat yang lembab dan berair dapat menyebabkan komponen-komponen adaptor rusak serta dapat menyebabkan konsleting jika suatu saat adaptor dipakai.
Disamping perawatan dan pemeliharaan adaptor, kita harus tahu juga apakah adaptor yang kita pakai berkondisi baik atau tidak. Cara mengetahui apakah adaptor kita berkondisi baik atau tidak yaitu dengan cara melakukan pengecekan, yaitu : a. Cek tegangan output adaptor dengan menggunakan AVOmeter (Multitester).
Mengecek tegangan output adaptor berarti meyakini apakah adaptor berkondisi baik atau tidak apabila setelah di cek adaptor tidak memiliki tegangan output maka adaptor dalam kondisi rusak.
b. Cek suhu trafo pada adaptor.
Bila saat pengecekan suhu pada adaptor memiliki panas yang berlebih berarti adaptor dalam kondisi rusak.
a. Output tegangan pada adaptor tidak ada.
b. Output tegangan pada adaptor tidak sesuai dengan nilai tegangan pada Output
IC (tidak normal).
c. Output tegangan pada adaptor tidak stabil (Tegangan naik turun).
d. Adaptor mengeluarkan suhu panas yang berlebihan sehingga casing meleleh.
(Moch Duro, 2012)
2.8.1 Kerusakan Pada Adaptor Dan Cara Memperbaikinya
Di dalam penggunaan adaptor terdapat kerusakan-kerusakan yang timbul. Apabila adaptor berfungsi dengan tidak normal selayaknya adaptor atau adaptor mati total kemungkinan kerusakan pada bagian kabel jack input, trafo dan rangkaian,
maka itu lakukan pengecekan pada bagian tersebut. Berikut dibawah ini adalah cara untuk melakukan pengecekan pada bagian tersebut dan solusi untuk menanganinya. a. Kabel jack input
Lihat dan cek jack input adaptor apakah kabelnya terhubung dengan baik pada
adaptor dan sumber tegangan, kalau tidak terhubung dengan baik maka kabel
jack atau pelatuk jack rusak/putus maka solusinya ganti kabel jack atau pelatuk jack.
b. Transformator
c. Rangkaian
Jika output trafo ada tegangan tetapi output adaptor tidak ada tegangan berarti tidak diragukan lagi yaitu rangkaian catu dayanya rusak.
Solusinya :
a) Cek dioda apakah berfungsi dengan baik yaitu dengan menggunakan
AVOmeter.
b) Cek apakah elco bekerja dengan normal yaitu dengan mencabut elco dari
rangkaian lalu tes dengan AVOmeter jika elco rusak ganti dengan elco yang
baru.
c) Cek output tegangan IC (IC7805, IC7812 dan IC lainnya) kalau tidak ada
ANALISIS DAN PERANCANGAN SISTEM
Pada BAB III ini akan dibahas analisis dan perancangan sistem baik pada perancangan alat simulasi, perangkat keras (hardware) dan perangkat lunak
(software). Perancangan perangkat keras (hardware) meliputi :
a. Rangkaian mikrokontroler ATmega328.
b. Motor servo.
c. Rangkaian Sensor LED infra merah.
d. EMS RF Transceiver Shield.
e. DT Proto Header Shield.
Untuk perancangan perangkat lunak meliputi jalannya program bahasa C yang dimasukkan ke mikrokontroler ATmega328 untuk mengaktifkan sensor LED
infra merah, EMS RF Transceiver Shiled sebagai pengirim data dan motor servo
yang terpasang pada palang pintu.
3.1 Analisis Sistem
Pada pembuatan alat ini peneliti memperhatikan beberapa aspek yang dibutuhkan, yaitu :
a. Alat ini dirancang dengan menggunakan sensor infra merah sebagai pendeteksi datangnya kereta.
d. Alat ini dirancang untuk dapat membuka dan menutup palang pintu perlintasan dengan menggunakan motor servo secara otomatis ketika kedua sensor infra merah terhalang oleh kereta yg melintas.
e. Alat ini dirancang dengan menggunakan kedua antena wireless sebagai pengirim dan penerima data dari sensor infra merah tersebut.
3.2 Perancangan Perangkat Lunak
Setelah pembuatan perangkat keras selesai, bagian yang paling penting dalam pembuatan tugas akhir ini yaitu dalam merancang suatu perangkat lunak. Pada tugas akhir ini, perancangan perangkat lunak dibagi menjadi 2 bagian yaitu :
a. Perancangan perangkat lunak untuk PC.
b. Perancangan perangkat lunak untuk mikrokontroler.
3.2.1 Perancangan Perangkat Lunak Untuk PC
Pada bagian ini menjelaskan tentang perancangan perangkat lunak untuk PC,
yang berfungsi untuk mengirim data ke mikrokontroler. Untuk perangkat lunak disini penulis menggunakan Arduino 1.0.5 for Windows dan menggunakan bahasa C
untuk pemrogramannya.
Software Arduino yang akan digunakan adalah driver dan IDE, walaupun
masih ada beberapa software lain yang sangat berguna selama pengembangan
Arduino. IDE Arduino adalah software yang sangat canggih ditulis dengan
Sebuah window yang memungkinkan pengguna menulis dan mengedit program
dalam bahasa processing.
b. Compiler
Sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode
biner. Bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa
processing, yang bisa dipahami oleh mikrokontroler adalah kode biner. Itulah
sebabnya compiler diperlukan dalam hal ini.
c. Uploader
Sebuah modul yang memuat kode biner dari komputer ke dalam memory didalam
papan Arduino.
Sebuah kode program Arduino umumnya disebut dengan istilah sketch. Kata
“sketch” digunakan secara bergantian dengan “kode program” dimana keduanya
memiliki arti yang sama.
3.3 Perancangan Perangkat Elektronik
tegangan, yang menjadi masukan untuk sistem mikrokontroler ATmega328.
Sedangkan keluaran mikrokontroler akan dirubah menjadi gelombang radio yang akan dikirimkan melalui pemancar wireless dan diterima oleh suatu pemancar wireless juga. Data yang dikirimkan melalui gelombang radio tersebut akan diproses kedalam mikrokontroler yang nantinya akan menjadi sebuah tegangan output untuk
menghidupkan suatu buzzer alarm serta menjalankan kedua motor servo.Kemudian
terdapat rangkaian sensor infra red lain sebagai inputan yang berfungsi sebagai mengubah cahaya berubah menjadi elektrik berupa tegangan yang nantinya menjadi masukan ke mikrokontroler yang akan diproses sebagaimana fungsinya jika mendapatkan inputan yang telah ditentukan. Yaitu apa bila sistem minimum mendapatkan masukan dari sensor infra red yang menandakan bahwa benda yang ditentukan sudah tertangkap, maka sistem akan mengirimkan suatu output untuk
mematikan buzzer alarm dan motor servo.
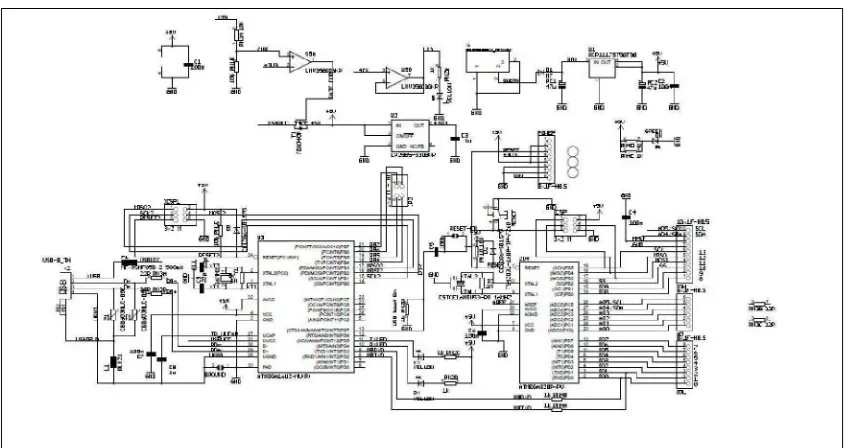
3.4 Rangkaian Mikrokontroler ATmega328
Rangkaian mikrokontroler berfungsi untuk mengolah sinyal yang dikirimkan oleh beberapa sensor infra red kemudian di olah. Pemeriksaan sensor infra red serta pengaturan pergerakan motor yang diinginkan sehingga palang pintu dapat bergerak sesuai dengan pembacaan sensor infra red agar palang pintu dapat membuka dan menutup sesuai dengan yang telah ditentukan. Gambar rangkaian mikrokontroler
Gambar 3.2 Skema Rangkaian Mikrokontroler
Arduino Uno adalah board Arduino revisi terbaru yang merupakan penerus
dari Arduino Duemilanove. Sama dengan board sebelumnya. Duemilanove Uno
merupakan board mikrokontroler yang berdasarkan pada ATmega328.
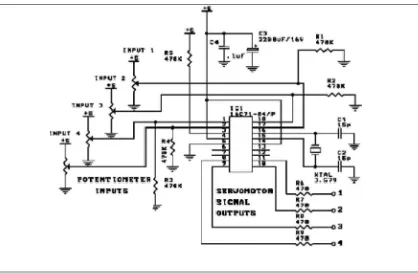
3.5 Motor Servo
Gambar 3.3 Skema Rangkaian Motor Servo
3.6 Rangkaian Sensor Infra Merah
Sebagai penentu alat ini berjalan secara otomatis penulis menggunakan sensor infra merah yang merupakan bagian dari sensor visual untuk merubah sebuah cahaya menjadi besaran listrik. Rangkaian ini terdiri dari sebuah LED photo Diode yang
terhubung secara berhadapan dengan jarak kurang lebih 5 cm dari LED infra merah
penerima. Gambar rangkaian sensor infra merah ditunjukkan pada gambar 3.7.
penentuan pusat pengendali palang pintu perlintasan untuk menjalankan tugasnya yang terhubung ke memory untuk memproses data yang sudah ditentukan. Tujuan
penggunaan sensor infra merah adalah agar bisa mendapatkan pergerakan yang hasilnya lebih akurat.
Pada saat sensor infra merah mendapatkan pergerakan dari kereta yang melintas maka sensor akan mengirimkan data ke mikrokontroler, sedangkan apabila sensor tidak mendapatkan pergerakan dari kereta yang melintas maka sensor tidak akan mengirimkan data ke mikrokontroler.
3.7 Rangkaian DT-Proto Header Shield
DT-Proto Header Shield merupakan sebuah modul add-on untuk DT-AVR Inoduino. Modul ini juga mendukung Arduino Uno dan Arduino Mega. Modul ini
adalah modul adapter untuk mengubah tata letak pin input / output DT-AVR
Inoduino agar kompatibel dengan produk-produk lain yang menggunakan
antaramuka melalui header 5x2. ISP HEADER (J5 dan J13) berfungsi sebagai jalur
pemrograman secara ISP. J5 dapat dihubungkan ke modul DT-AVR Inoduino
sedangkan J13 dapat diberi header untuk dihubungkan ke ISP programmer. Tidak
disarankan memprogram secara ISP melalui ISP HEADER. Jika modul diprogram
ulang secara ISP, maka bootloader akan terhapus. Gambar rangkaian DT-Proto
Gambar 3.5 Skema Rangkaian DT-Proto Header Shield
3.8 Perancangan Alat Simulasi
Alat ini terdiri dari mika acrilyic yang berguna untuk menjadi badan
pemasangan perangkat mikrokontroler dan rangkaian elektronikanya. Tempat rangkaian elektronika sepeti mikrokontroler, motor servo, sensor infra merah,
DT-Proto Header Shield dan EMS RF Transceiver Shield terletak pada atas mika acrelyic ini atau dibagian badan alat ini. Bagian sensornya terdapat pada samping
dibagian samping kiri dan kanan dengan posisi berseberangan. Alat ini didesain persegi panjang dengan dua sensor infra merah dipasang di sisi sebelah kiri beserta rangkaian mikrokontrolernya dan satu lagi dipasang di sisi sebelah kanan dengan dua sensor infra merah yang sama beserta rangkaian mikrokontrolernya. Hal ini dikarenakan agar alat ini hampir menyerupai kondisi yang ada dilapangan dan dimaksudkan demi pencapaian desain yang sebaik mungkin supaya mempunyai hasil yang optimal serta mempunyai kapasitas yang memadai untuk pemasangan perangkat elektronika yang ada.
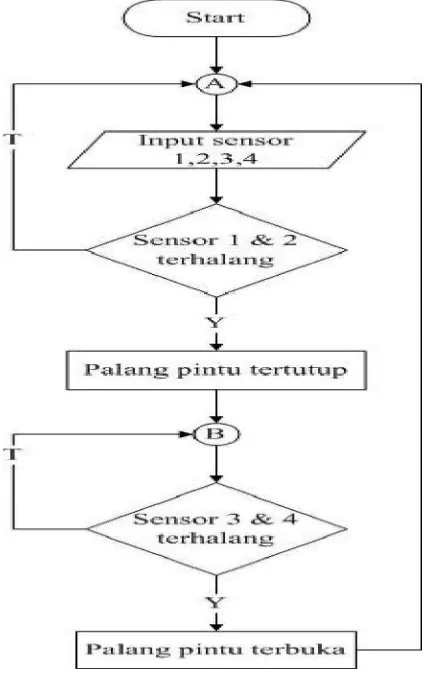
a. Awal alur program.
b. Menunggu inputan dari beberapa sensor yang terpasang.
c. Jika sensor 1 dan 2 terhalang maka sensor tersebut akan menjalankan perintah program untuk menutup palang pintu. Jika sensor tidak ada inputan / tidak terhalang sama sekali maka kembali ke inputan dari beberapa sensor tersebut. d. Setelah sensor 1 dan 2 terhalang maka palang pintu dengan sendirinya akan
menutup secara otomatis.
e. Jika sensor 3 dan 4 terhalang maka sensor tersebut akan menjalankan perintah program untuk membuka palang pintu. Jika sensor tidak ada inputan / tidak terhalang sama sekali maka pintu akan tetap menutup.
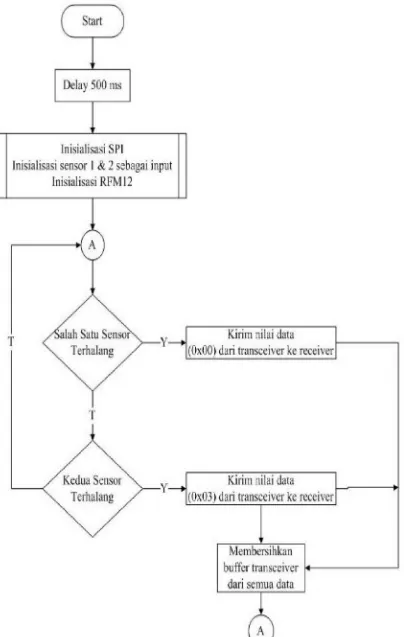
a. Awal alur program.
b. Proses delay 500 ms sebelum melakukan inisialisasi.
c. Setelah itu maka akan dilakukan inisialisasi SPI, inisialisasi sensor 1 dan sensor
2 sebagai input dan inisialisasi RFM12 sebagai pengirim data.
d. Setelah port-port sudah di inisialisasikan, kemudian jika salah satu dari sensor
tersebut terhalang maka akan mengirimkan nilai data 0x00 dari transceiver
menuju receiver atau data tersebut tidak akan di proses.
e. Kemudian jika sensor 1 terhalang dan sensor 2 terhalang / kedua sensor tersebut terhalang, maka akan mengirimkan nilai data 0x03 dari transceiver menuju
receiver yang nantinya akan di proses lebih lanjut.
f. Setelah sensor telah melakukan beberapa proses maka alur selanjutnya akan kembali menuju pemilihan proses berdasarkan kondisi yang ada.
g. Setelah semua proses data dikirim melalui RFM12, maka transceiver akan
membersihkan / menghapus buffer dari semua data yang dikirimkan yang
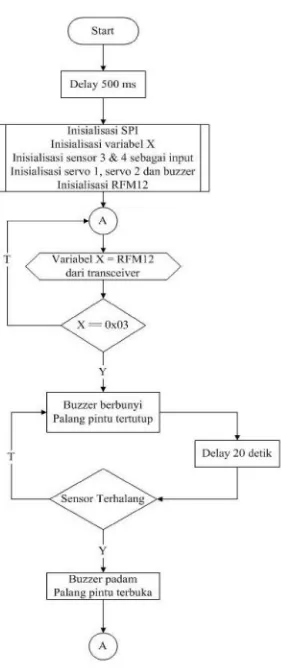
a. Awal alur program
b. Proses delay 500 ms sebelum melakukan inisialisasi.
c. Setelah itu maka akan dilakukan inisialisasi SPI, inisialisasi variabel X,
inisialisasi sensor 3 dan sensor 4 sebagai input, inisialisasi servo 1, servo 2 serta
buzzer dan inisialisasi RFM12 sebagai penerima data.
d. Setelah port-port sudah di inisialisasikan, Kemudian receiver melakukan
persiapan untuk menerima nilai data yang dikirimkan dari transceiver.
e. Jika nilai data yang diterima dari transceiver adalah 0x03 maka selanjutnya data
tersebut akan diproses untuk dijadikan sebagai input yang befungsi untuk membunyikan buzzer dan menjalankan motor servo untuk menutup palang
pintu. Jika tidak maka akan kembali menuju persiapan penerimaan data yang dikirimkan dari transceiver.
f. Setelah buzzer berbunyi dan palang pintu tertutup maka selanjutnya adalah
menjalankan proses counter timer selama 20 detik, yaitu memberi delay waktu
selama 20 detik setelah palang pintu tertutup.
g. Kemudian setelah proses delay sudah berjalan selama 20 detik sesuai yang
ditentukan sudah habis maka menunggu kedua sensor terhalang untuk mematikan buzzer alarm dan menjalankan palang pintu perlintasan untuk
membuka dengan sendirinya. Karena selama delay waktu masih berjalan kedua
sensor tidak akan aktif dengan benda yang menghalanginya. Sebaliknya jika kedua sensor tersebut belum terhalang maka palang pintu akan tetap tertutup. h. Setelah buzzer padam dan motor servo berhasil membuka palang pintu maka
HASIL DAN PEMBAHASAN
Pada bab ini akan membahas tentang hasil dan pembahasan dari analisis dan uji coba sistem yang ada pada bab III, serta bagaimana cara sistem tersebut dijalankan.
4.1 Alat yang Digunakan
Pada implementasi program, alat-alat yang digunakan yaitu perangkat keras (hardware)dan perangkat lunak (software) yang dijabarkan sebagai berikut :
A. Perangkat Keras
Perangkat keras (hardware)yang digunakan adalah :
a. Rangkaian minimum Arduino UnoATmega328.
b. Miniatur alat simulasi. c. Sensor infra merah. d. Motor servo. e. Lampu LED.
f. DT-Proto header shield.
g. EMS RF transceiver shield.
Perangkat lunak (software)yang digunakan adalah :
a. Windows 7 ultimate 64 bit.
b. Arduino 1.0.5 for Windows.
4.2 Prodesur Pembuatan Program
4.2.1 Instalasi Driver Arduino 1.0.5 for Windows
Ada beberapa cara yang harus dilakukan sebelum program dibuat dan dimasukkan kedalam mikrokontroler, yaitu :
a. Klik dan Install terlebih dahulu aplikasi Arduino 1.0.5 for Windows.exe pada
komputer.
Gambar 4.2 Arduino License Agreement
c. Setelah meng-klik tombol “I Agree” dari jendela Arduino License Agreement,
maka akan masuk ke menu installation option. Centang semua kolom menu dan
kemudian klik tombol ”Next”.
Files (x86)\Arduino\.
Gambar 4.4 Installation Folder
e. Proses instalasi sedang berlangsung.
Gambar 4.6 Instalasi Selesai
4.2.2 Instalasi Port USB ke Dalam PC
Pada saat kita pertama kali menghubungkan arduino ke PC atupun laptop
maka akan muncul instalasi new device. Kadang success kadang juga sebaliknya.
Berikut adalah langkah langkah instalasi driver :
a. Hubungan Ardunino ke komputer menggunakan kabel USB.
b. Pada bagian bawah desktop akan muncul pop up installing devive driver
software seperti gambar di bawah ini :
Arduino.
Gambar 4.8 Device Driver Software gagal terinstal
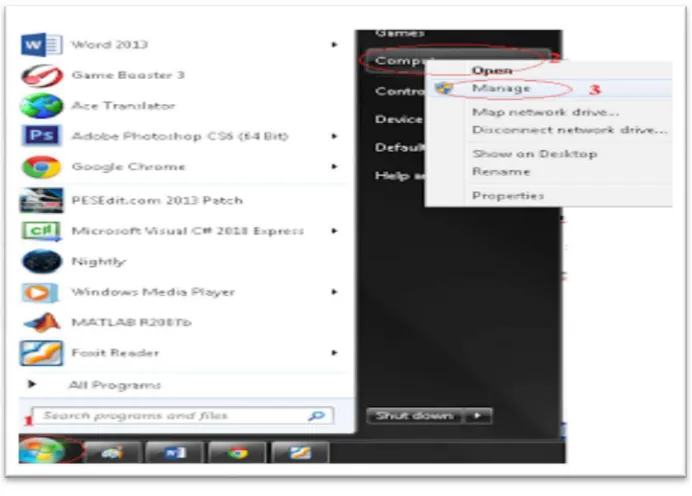
d. Kemudian masuk ke start – computer - manage.
Gambar 4.10 Device Manager
f. Setelah itu cari Unknow device pada other Device.
Gambar 4.12 Unknown Device
h. Pilih Browse my computer for driver software.
Gambar 4.14 Memilih Folder Driver Arduino Terinstal
j. klik instal pada Windows Security.
Gambar 4.15 Windows Security
program Arduino.
Gambar 4.17 Port USB Arduino Uno
4.2.3 Menjalankan Aplikasi Arduino
Setelah semua instalasi berhasil, maka ada beberapa cara yang harus dilakukan sebelum program dibuat dan dimasukkan kedalam mikrokontroler, yaitu :
a. Klik dua kali pada aplikasi Arduino yang ada di dekstop windows anda
anda maka akan keluar jendela seperti yang ada pada gambar dibawah ini.
Gambar 4.19 Tampilan Jendela Arduino
c. Langkah selanjutnya adalah pilih > tools lalu pilih > AVRISP mkII untuk tipe
USB ISP yang digunakan, seperti tampilan pada gambar dibawah ini.
board yang sesuai. Untuk minimum sistem ini, board yang digunakan adalah Arduino Uno. Seperti terlihat pada gambar dibawah ini.
Gambar 4.21 Setting Board minimum sistem
e. Tahap selanjutnya adalah memilih serial port yang sesuai, serial port ini
bertugas sebagai media untuk men-download program ke dalam perangkat
minimum sistem, serial port yang digunakan seperti terlihat pada gambar
dibawah ini.
perangkat minimum sistem.
Persiapan pertama sebelum men-download adalah menghubungkan minimum
sistem dengan PC melalui USBport atau serial port tergantung spesifikasi minimum
sistemnya. Langkah berikutnya adalah membuat listing program yang akan
di-download-kan nantinya dengan software Arduino.
Langkah berikutnya setelah pengetikan listing program selesai adalah proses
compile, yaitu proses pengecekan adanya error pada listing program yang telah
dibuat, jika tidak terdapat error, listing program dapat disimpan. Program tersebut
dapat disimpan dengan ekstensi “.ino” maupun langsung di unggah ke minimum sistem.
4.3 Implementasi Coding
Pada tahap ini akan dibahas mengenai program yang telah dibuat untuk mikrokontroler tersebut. Berikut penjelasan beserta program yang telah dibuat. Langkah pertama yang harus dilakukan adalah mendeklarasi semua fungsi, library,
dan delay perintah ke perintah yang lain dari program yang akan kita susun. Berikut
adalah potongan program yang merupakan penentuan fungsi pada mikrokontroler dalam pembacaan perintah sebelum ke perintah utama.
#include <SPI.h> #define RFIRQ 4
mikrokontroler selesai, langkah selanjutnya adalah menginisialisasi pin-pin sensor infra merah, RF Transceiver dan DT-Proto Header Shield yang terpasang.
const int buttonPin = 2; // the number of the pushbutton pin
const int buttonPin1 = 3; // the number of the pushbutton pin
// variables will change:
int buttonState = 0; // variable for reading the pushbutton status
int buttonState1 = 0; // variable for reading the pushbut
unsigned char x;
void setup()
{
unsigned int n;
Potongan program dibawah ini adalah untuk RF Transceiver yang berfungsi
untuk mengirimkan data menuju receiver setelah inputan-inputan berhasil diproses
servo dan membunyikan buzzer alarm setelah data diterima oleh RF Receiver yang
dikirimkan dari RF Transceiver.
if (x == 0x03){
digitalWrite(buzer, HIGH); // turn the Buzer on (HIGH is the voltage level)
if (buttonState == LOW && buttonState1 == LOW && x == 0x00){
delay(1000);
while(buttonState == LOW && buttonState1 == LOW){
Pada bagian ini akan dibahas mengenai pengujian pada hardware yang telah
dirancang. Tujuan dari pengujian ini adalah untuk mengetahui apakah hardware
tersebut telah berfungsi dengan benar dan sesuai rencana atau tidak. Pengujian ini ditujukan pada pengujian komponen yang terdapat pada alat serta pengujian sensor wireless infra merah berbasis mikrokontroler untuk mengidentifikasi gerakan kereta api dan pengiriman data melalui gelombang radio.
4.5 Pengujian Alat Simulasi
Berikut ini adalah pengujian alat atau komponen yang terdapat pada alat simulasi untuk menguji coba jalannya sensor inframerah, pengiriman data, serta menjalankan motor servo yang terpasang pada palang pintu perlintasan. Secara keseluruhan, dari sensor yang mendapatkan inputan kemudian mengirimkan data melalui sinyal wireless yang akan diterima oleh receiver kemudian membunyikan buzzer alarm
serta menjalankan motor servo untuk membuka dan menutup palang pintu perlintasan tersebut.
4.5.1 Pengujian Rangkaian Sensor Inframerah
Rangkaian sensor inframerah berfungsi sebagai inputan untuk nilai data yang akan diproses ke dalam minimum sistem. Rangkaian sensor inframerah tersebut memiliki 2 sistem yaitu transceiver dan receiver. Hasil pengujian rangkaian sensor
Tabel 4.1 Hasil Pengujian Rangkaian Sensor Inframerah Transceiver Kondisi Sensor Inframerah 1 Sensor Inframerah 2 Variabel
Nilai Data
1 Terhubung Terhubung 0
2 Terhalang Terhubung 1
3 Terhubung Terhalang 2
4 Terhalang Terhalang 3
Tabel 4.2 Hasil Pengujian Rangkaian Sensor Inframerah Receiver Kondisi Sensor Inframerah 3 Sensor Inframerah 4 Variabel
Nilai Data
1 Terhubung Terhubung 0
2 Terhalang Terhubung 1
3 Terhubung Terhalang 2
4 Terhalang Terhalang 3
4.5.2 Pengujian Rangkaian Motor Servo dan Buzzer Alarm
Pada uji coba terhadap motor servo dan buzzer alarm penulis menggunakan
sumber catu daya, yaitu dengan menggunakan adaptor power supply 12 volt – 9
ampere agar kedua motor servo dapat bergerak dengan semestinya dan buzzer alarm
dapat berbunyi sebagai peringatan dini datangnya kereta api. Hasil pengujian rangkaian motor servo dan buzzer alaram dapat dilihat pada tabel dibawah ini.
Tabel 4.3 Hasil Pengujian Motor Servo dan Buzzer Alarm Saat Kereta Datang
Pin Kondisi
Sensor 1 dan 2
Keterangan Hasil Uji
Servo 1 dan Servo
Kondisi 1 Tidak berputar Palang pintu terbuka Kondisi 2 Tidak berputar Palang pintu
menutup
Buzzer Alarm
Kondisi 1 Off Buzzer padam
Kondisi 2 Off Buzzer padam
Kondisi 3 Off Buzzer padam
Kondisi 4 On Buzzer berbunyi
Tabel 4.4 Hasil Pengujian Motor Servo dan Buzzer Alarm Setelah Kereta Melintas
Pin Kondisi
Sensor 3 dan 4
Keterangan Hasil Uji
Servo 1 dan Servo 2
Kondisi 1 Tidak berputar Palang pintu menutup Kondisi 2 Tidak berputar Palang pintu
menutup Kondisi 3 Tidak berputar Palang pintu
menutup Kondisi 4 Berputar Palang pintu
terbuka
Buzzer Alarm
Kondisi 1 On Buzzer berbunyi
Kondisi 2 On Buzzer berbunyi
Kondisi 3 On Buzzer berbunyi
Kondisi 4 Off Buzzer padam
4.5.3 Pengujian alat standby
Ketika kedua mikrokontroler mendapatkan inputan sumber daya listrik maka semua perangkat elektronik yaitu sensor infra merah, RF Transceiver dan
RF Receiver, buzzer alarm serta motor servo yang terpasang pada minimum
Gambar 4.23 Pengujian Alat Standby
4.5.4 Pengujian sensor infra merah 1 dan 2 ketika mendapatkan inputan serta pengiriman data dari transceiver menuju receiver untuk membunyikan
buzzer alarm serta menjalankan motor servo untuk menutup palang pintu.
Setelah alat standby maka kedua sensor infra merah akan menunggu inputan
yang nantinya akan diproses didalam mikrokontroler yang selanjutnya akan dikirim melalui sinyal wireless untuk diterima oleh pemancar receiver. Kedua
Gambar 4.24 Sensor 1 Terhalang dan Sensor 2 Terhubung