Mata kuliah Teori Pengoptimuman merupakan salah satu mata kuliah pilihan bagi mahasiswa Program Studi Matematika Universitas Mataram yang disajikan pada semester 5 dengan bobot 3 SKS. Dengan melihat obyek dan bobot dari mata kulian ini, materi-materi yang disajikan dipilih sedemikian hingga mahasiswa yang telah lulus mata kuliah ini memiliki sejumlah kemampuan dasar yang berkaitan dengan teori dasar yang berkaitan dengan metode pengoptimuman dan penerapannya.
Buku ini dikemas dalam enam bab. Bab I berisi tentang apa dan bagaimana terkait dengan teori pengoptimuman, dilengkapi dengan landasan matematika yang berisi teori-teori yang mendukung dalam teknik pengoptimuman. Bab II tentang teknik-teknik pengoptimuman tanpa menggunakan konsep kalkulus. Bab III mengupas tentang tehnik pengoptimuman untuk kasus optimasi tanpa kendala. Bab IV membahas tentang tentang tehnik pengoptimuman untuk kasus optimasi yang berkendala. Bab V membahas tentang topik khusus yang berkaitan dengan program geometrik dan pada Bab VI membahas tentang topik program dinamik.
Buku ini disajikan dengan bahasa sederhana disertai dengan pembahasan contoh-contoh yang terkait dengan topik yang diuraikan. Pada setiap babnya disediakan beberapa soal latihan. Mahasiswa diharapkan mempelajari dengan baik dan cermat setiap metoda dan cara yang dilakukan dalam pemecahan soal-soal pada contoh yang diberikan dan mengerjakan semua latihan yang ada.
Akhirnya, kami menyampaikan terima kasih kepada Dekan FMIPA Universtas Mataram yang memberikan kesempatan kepada kami untuk menyusun buku ini. Kemudian sebagai penyusun kami menyadari kemungkinan adanya kekeliruan atau kesalahan pada buku ini, dengan hati terbuka kami menerima segala kritikan dan saran demi perbaikan buku ini.
Kata Pengantar
Bab 1. Pendahuluan
1.1. Pendahuluan
1.2. Landasan Matematika 1.2.1. Norma
1.2.2. Invers Matriks
1.2.3. Karakteristik Nilai Eigen 1.2.4. Fungsi dan Diferensial
1.2.5.Himpunan Konveks dan Fungsi Konveks
1.3. Kondisi Optimal untuk Masalah Optimasi Tidak Berkendala 1.4. Latihan
Bab 2. Optimasi Tanpa Kalkulus
2.1. Ketaksamaan Rata-Rata Aritmatika dan Geometri 2.2. Optimasi Menggunakan Ketaksamaan AM-GM 2.3. Ketaksamaan Cauchy
2.4. Hasil Kali Dalam untuk Matriks Bujur Sangkar 2.5. Latihan
Bab 3 Optimasi Tanpa Kendala
2.1. Metode Steepest-Descent 2.2. Metode Newton2.3. Metode Gauss-Newton 2.4. Latihan
Bab 4. Optimasi Berkendala
4.1. Kendala4.2. Klasifikasi Permasalahan Optimasi Berkendala
4.2.2 Program Kuadratik (Quadratic Programming) 4.2.3 Program Konveks (Convex Programming)
4.2.4 Bentuk Umum Permasalahan Optimasi Berkendala 4.3. Metode Transformasi
4.4. Pengganda Lagrange (Lagrange Multiplier)
4.4.1 Pengganda Lagrange untuk Permasalahan Kendala Persamaan 4.4.2 Kasus Khusus : Fungsi Kuadratik dengan Kendala Linear
4.4.3 Metode Lagrange untuk Kendala Pertidaksamaan 4.5. Teorema Karush-Kuhn-Tucker
4.6 . Latihan
Bab 5. Program Geometrik
5.1 Pendahuluan5.2 Posinomial
5.3 Program Geometri Tanpa Kendala
5.3.1 Tingkat Kesulitan (degree of difficulty) 5.3.2 Syarat Cukup untuk Solusi PG
5.4 Solusi Program Geometri Menggunakan Ketaksamaan Aritmatik-Geometrik
5.5 Relasi Primal-Dual dan Syarat Cukup untuk Kasus Tanpa Kendala 5.6 Permasalahan Optimasi Berkendala
5.7 Penyelesaian Permasalahan Program Geometrik Berkendala 5.8 Latihan
Bab 6. Program Dinamik
6.1 Pendahuluan6.2 Definisi Program Dinamik
6.3 Sifat atau Karakteristik Program Dinamis 6.4 Multi Tahapan Proses Pengambilan Keputusan
6.5 Konsep Suboptimalisasi dan Prinsip Optimalitas dalam Permasalahan Program Dinamik
6.6 Metode Kalkulus untuk Penyelesaian Program Dinamik
BAB 1
PENDAHULUAN
1.1 Pendahuluan
Teori optimasi merupakan salah satu subyek dalam matematika terapan, matematika komputasi, dan riset operasi yang memiliki ranah aplikasi yang cukup luas pada berbagai bidang seperti sains, enginering, ekonomi dan bisnis, keuangan, militer, dan sebagainya. Secara khusus, teori dan metode optimasi merupakan suatu alat untuk menentukan solusi optimal dari suatu permasalah nyata yang didefinisikan secara matematika menggunakan metode ilmiah dan alat-alat (teori atau metode) yang terkait dalam penentuan solusi optimal tersebut.
Penyelesaian permasalahaan optimasi merupakan suatu langkah ilmiah penentuan solusi optimal atau terbaik terhadap suatu permasalahan nyata yang terdiri atas serangkaian kegiatan yang meliputi penyusunan model matematika yang terkait dengan masalah yang dipecahkan. Model matematika ini berkaitan dengan proses pendefinisian variabel yang merepresentasikan permasalahan yang dihadapi, penentuan fungsi tujuan, dan fungsi kendala.
Secara umum, model optimasi diberikan oleh Persamaan (1.1.1) berikut ini. Min ( ) dengan f x x X, atau Min ( )f x
x X
(1.1.1)
dengan x menyatakan variabel keputusan (decision variable), f x( ) menyatakan fungsi tujuan (objective function), dan n
X menyatakan himpunan kendala (constrain set) atau daerah feasibel (feasible region). Secara khusus, permasalahan optimasi dapat dibedakan atas dua tipe, yaitu optimasi tanpa kendala dan optimasi berkendala. Permasalahan optimasi tanpa kendala diberikan oleh Persamaan (1.1.2) berikut :
Min ( )f x x X
(1.1.2)
Min ( )
dengan E dan I berturut-turut menyatakan himpunan indeks untuk kendala berupa persamaan (equality constraints) dan kendala berbentuk pertidaksamaan (inequality
constraints).
1.2 Landasan Matematika
Pada sub bagian ini akan diuraikan beberapa konsep matematika yang menjadi dasar pengembangan teori dan metode pengoptimuman, seperti norma, matriks, fungsi, diferensial, himpunan dan fungsi konveks.
1.2.1 Norma
Pada buku ini, notasi n
dan n
berturut-turut menyatakan ruang berdimensi n
atas lapangan real dan lapangan kompleks. Untuk n
atau n
x menyatakan n -tupel, x
x x1, ,2 ,xn
dengan xiatau xi; i1, 2,, .nDefinisi berikut akan memberikan pengertian tentang terminologi norma. Definisi 1.1 Misalkan , n
x y dan sebarang. Fungsi : n
disebut
norma, jika memenuhi pernyataan berikut ini :
(i). x 0, dan x 0 jika dan hanya jika x0, (ii). x x ,
(iii). xy x y .
Untuk n,
Secara umum, untuk suatu bilangan bulat p didefinisikan Norma-lp sebagai berikut:
disebut norma matriks, jika memenuhi pernyataan berikut ini :
(i). A 0, dan A 0 jika dan hanya jika A0, (ii). A A ,
(iii). A B A B .
Berkaitan dengan norma-lppada (1.2.1), norma-lpuntuk matriks adalah sebagai berikut :
Secara khusus, beberapa definisi norma yang sudah sering dan umum digunakan adalah (1). Norma maksimum atas vektor kolom:
1 1
(2). Norma maksimum atas vektor baris:
1 1
Selanjutnya berdasarkan definisi norma tersebut di atas, didefinisikan konsep jarak sebagai berikut.
Definisi 1.3 Misalkan , n
x y . Jarak antara titik x dan y pada ruang n,
dinotasikan dengan d x y( , ), merupakan suatu fungsi ( , ) : n n
d x y yang
Berdasarkan definisi norma, berikut ini adalah karakteristik dari fungsi jarak.
Definisi 1.4 Misalkan , , n
x y z .
(i). d x y( , )0 dan d x y( , )0 jika dan hanya jika x y,
(ii). d x z( , )d x y( , )d y z( , ), (iii).d x y( , )d y x( , ).
Selanjutnya berikut akan diberikan beberapa terminologi konvergensi barisan vektor pada n
dan barisan matriks pada ruangm n .
Definisi 1.5 Misalkan xk n, untuk setiap n bilangan asli. Barisan vektor
xk dikatakan konvergen ke-x, jikalim n 0
n x x (1.2.6)
Selanjutnya, misalkan m n k
A , untuk setiap m n, . Barisan matriks
Ak dikatakan konvergen ke A, jikalim n 0
n A A (1.2.7)
Definisi 1.6 Barisan
xk n dikatakan barisan Cauchy, jika untuk setiap 0terdapat indeks N sehingga xn xm , untuk setiap n m, N.
Atau, untuk setiap n m, Nberlaku
,
lim n m 0
n m x x (1.2.8)
1.2.2 Invers Matriks
Pada subbagian ini akan diuraikan beberapa teorema dasar yang berkaitan dengan invers dan invers yang diperumum (generalized inverse) dari matriks.
Teorema 1.7 [Sun dan Yuan, 2006:9]
Misalkan . konsisten norma matriks dengan I 1 dan En n sebarang. Jika
1
1 adalah nonsingular dan memenuhi
Teorema 1.8 [Sun dan Yuan, 2006:10]
Misalkan , n n
1.2.3 Karakteristik Nilai Eigen
Pada subbab ini, akan diuraikan beberapa terminologi yang terkait dengan nilai eigen, khususnya yang terkait dengan matriks definit positif, matriks definit negatif, dan matriks simetrik indefinit.
Definisi 1.9 Misalkan An n suatu matriks dan n, 0
x x . Bilangan
disebut nilai eigen dari matriks A, jika memenuhi kesamaan berikut:
Axx (1.2.14)
Definisi 1.10 Radius spektral dari matriks A didefinisikan dengan
1
( ) i
i n
A maks
(1.2.15)
Misalkan matriks n n
A dengan nilai–nilai eigen 1, 2,, .n Vektor eigen yang berkorespondensi dengan nilai eigen yang berbeda dari matriks A adalah bebas linear.
Definisi 1.11 Misalkan An n adalah matriks simetrik dan n v . (1). Matriks A disebut definit positif jika T 0
v Av , untuk setiap v0. (2). Matriks A disebut semidefinit positif jika T 0
v Av .
(3). Matriks A disebut definit negatif jika A definit positif atau T 0
v Av , untuk
setiap v0.
(4). Matriks A disebut semidefinit negatif jika A semidefinit negatif atau T 0 v Av . (5). Matriks A disebut indefinit, jika A bukan semidefinit positif atau semidefinit
negatif.
Misalkan n n
A adalah matriks simetrik. Beberapa karakteristik dari matiks A
adalah sebagai berikut :
(1). Semua nilai eigen dari A adalah bilangan real.
(2). Vektor eigen yang berkorespondensi dengan nilai-nilai eigen yang berbeda dari matriks A adalah ortogonal.
Berdasarkan Definisi 1.10, beberapa karakteristik yang terkait dengan matriks simetrik definit posifif, semidefinit positif, definit negatif dan semidefinit negatif. Misalkan n n
A adalah matriks simetrik.
(1). Matriks A adalah definit positif jika dan hanya jika semua nilai eigen dari matriks A adalah positif.
(2). Matriks A adalah semidefinit positif jika dan hanya jika semua nilai eigen dari matriks A adalah non negatif.
(3). Matriks A adalah definit negatif jika dan hanya jika semua nilai eigen dari matriks A adalah negatif.
(5). Matriks A adalah indefinit jika dan hany jika nilai eigen dari matriks A ada yang positif dan sekaligus yang negatif.
1.2.4 Fungsi dan Diferensial
Misalkan n
x dan 0. Sekitaran- (neighborhood) dari vektor x didefinisikan dengan
( ) n|
N x y y x (1.2.16)
Misalkan n
D dan xD. Titik x disebut titik interior dari D, jika terdapat sekitaran- dari x sedemikian hingga N x( )D. Himpunan semua titik interior dari himpunan D dinotasikan dengan Int D( ). Oleh karenanya, Int D( )D. Jika setiap titik pada D adalah titik interior atau Int D( )D, maka himpunan D adalah himpunan buka.
Titik n
x D disebut titik akumulasi atau titik limit, jika 0,
( ) D .
N x ini berarti, terdapat subbarisan
k nx pada D sehingga k n
x x. Himpunan semua titik limit dari D disebut tutupan (closore) dari D, dinotasikan dengan
D. Jelas bahwa DD. Selanjutnya, jika DD atau setiap titik limit pada D dimuat oleh D maka D adalah himpunan tutup.
Himpunan n
D disebut terbatas, jika terdapat bilangan real M sedemikian hingga x M, untuk setiap xD. Selanjutnya, himpunan n
D dikatakan himpunan kompak, jika D tutup dan terbatas.
Fungsi : n
f disebut kontinu di titik n,
Fungsi kontinu : n
f dikatakan kontinu terdiferensial di titik n,
c jika
atau Matriks Jacobian untuk fungsi f di titik n
x didefinisikan dengan
Jika f kontinu terdiferensial di setiap titik pada himpunan buka n
D maka f disebut kontinu terdiferensial pada D dan dinotasikan dengan f C D1( ). Secara umum, jika fungsi kontinu f x( ), dan ( ),f x f' ''( ),x ,f(p)( )x ada dan kontinu untuk setiap titik pada himpunan D, maka dinotasikan dengan p( ).
f C D
Fungsi kontinu terdifensial : n
f dikatakan mempunyai turunan kedua yang kontinu di n
Matriks Hessian dari fungsi f,2f, didefinisikan sebagai matriks simetris berukuran n n dengan elemen sebagai berikut
2
1.2.5 Himpunan Konveks dan Fungsi Konveks
1.2.5.1 Himpunan Konveks
maka himpunan S disebut himpunan konveks.
Secara umum, himpunan n
S disebut himpunan konveks, jika untuk setiap 1, ,2 , m
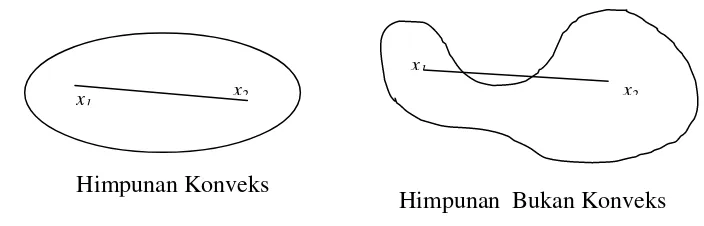
Secara geometri, Definisi 1.11 mengindikasikan bahwa jika x x1, 2Smaka segmen garis antara x1 dan x2 berada pada himpunan S, sebagaimana di ilustrasikan pada Gambar 1 berikut:
Gambar 1. Ilustrasi himpunan konveks dan himpunan bukan konveks
Pada Gambar 1, himpunan yang pertama (bagian kiri) terlihat bahwa x1 dan x2
serta semua titik pada ruas garis x x1 2 berada pada himpunan S, tetapi pada himpunan kedua (bagian kanan), x1 dan x2berada pada himpunan S, tetapi ada bagian pada ruas garis x x1 2yang berada di luar himpunan S.
Beberapa karakteristik himpunan konveks adalah sebagai berikut : 1) Misalkan S1 dan S2 adalah himpunan konveks pada n
(a). S1S2 adalah himpunan konveks.
(b). S1S2
x1x 2|x1S x1, 2S2
adalah himpunan konveks. 2) Jika nS adalah himpunan konveks maka
(a). Himpunan interior dari S, Int(S), adalah himpunan konveks. (b). Tutupan (closure) dari himpunan S adalah himpunan konveks.
1.2.5.2 Fungsi Konveks
Definisi 1.13 Misalkan Sn dan S merupakan himpunan konveks, serta fungsi
: n.
f S Jika untuk setiap x x1, 2S dan setiap
0,1 berlaku1 2 1 2
( (1 ) ) ( ) (1 ) ( ),
f x x f x f x (1.2.21)
maka fungsi f disebut fungsi konveks pada S.
Selanjutnya, jika terdapat c0 sedemikian hingga untuk setiap x x1, 2Sberlaku
2
1 2 1 2 1 2
1
( (1 ) ) ( ) (1 ) ( ) ,
2
f x x f x f x c x x (1.2.22)
maka fungsi f disebut fungsi konveks secara seragam (uniformly) pada S.
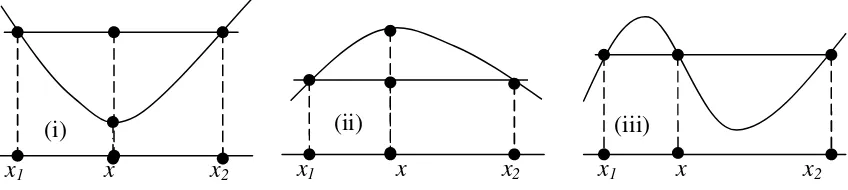
Jika fungsi f pada S merupakan fungsi konveks (konveks seragam), maka invers dari fungsi f yaitu
f merupakan fungsi konkaf /concave (konkaf seragam) pada S, seperti yang di ilustrasikan pada Gambar 2.Gambar 2 Ilustrasi grafik (i) fungsi konveks, (ii) fungsi konkaf, dan (iii) bukan fungsi konveks dan konkaf
Secara geometri, berdasarkan ilustrasi pada Gambar 2, fungsi konveks dapat diinterpretasikan sebagai suatu fungsi yang grafiknya berada di bawah ruas garis yang
x1 x x2
x1 x x2
(i)
x1 x x2
(ii)
x1 x x2
menghubungkan titik
x f x1, ( )1
dan titik
x2, ( )f x2
untuk setiap x
x x1, 2
. Sebaliknya, grafik fungsi konkaf berada di atas ruas garis yang menghubungkan titik
x f x1, ( )1
dan titik
x2, ( )f x2
untuk setiap x
x x1, 2
.Suatu fungsi : n
f S dikatakan fungsi konveks tegas (strictly convex) pada S, jika
( ( )) ( ) ( ( ) ( )), ,
f x yx f x f y f x x yS.
Selanjutnya teorema berikut akan memberikan hubungan antara fungsi konveks dengan matriks Hessian.
Teorema 1.14 Misalkan Sn suatu himpunan konveks yang tidak kosong dan misalkan pula f : S kontinu terdiferensial dua kali, f C S2( ).
1) Fungsi f adalah fungsi konveks jika dan hanya jika matriks Hessian yang berkaitan dengan fungsi f adalah matriks semidefinit positif untuk setiap titik di S.
2) Fungsi f adalah fungsi konveks tegas, jika matriks Hessian yang berkaitan dengan
fungsi f adalah matriks definit positif untuk setiap titik di S.
3) Fungsi f konveks seragam jika dan hanya jika matriks Hessian yang berkaitan
dengan fungsi f adalah matriks definit positif seragam untuk setiap titik di S, yaitu
terdapat konstanta m0 sehingga
2 2
(x) , dan
T n
m u u f u x S u
1.3 Kondisi Optimal untuk Masalah Optimasi Tidak Berkendala
Pada subbab ini, misalkan permasalahan optimasi tidak berkendala diberikan sebagai berikut:
min ( ), n
f x x (1.23)
Definisi 1.15 Titik x disebut titik minimum lokal (local minimizer),, jika terdapat
0
sedemikian hingga ( ) ( ), n
f x f x x dan xx . Kemudian, Titik x
disebut titik minimum lokal tegas (strict local minimizer), jika terdapat 0
sedemikian hingga ( ) ( ), , n ,
f x f x x xx dan xx .
Definisi 1.16 Titik x disebut titik minimum global (global minimizer), jika
( ) ( ), n
f x f x x . Kemudian, Titik x disebut titik minimum global tegas (strict
global minimizer), jika ( ) ( ), , n dan .
f x f x x xx
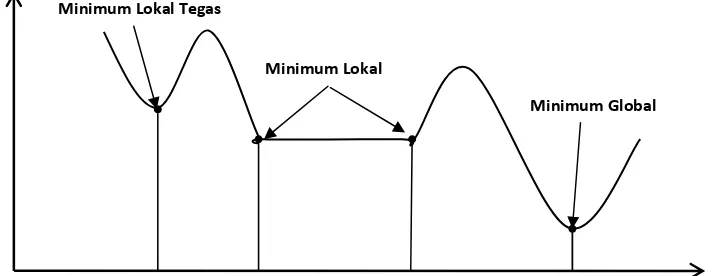
Secara geometri, ilustrasi definisi minimum lokal, minimum lokal tegas dan minimum global dapat dilihat pada Gambar 3. Pada tataran aplikasi, kebanyakan algoritma yang diajukan digunakan untuk menentukan minimum lokal. Sedangkan untuk minimum global merupakan pekerjaan yang cukup sulit, kecuali untuk beberapa fungsi tertentu yang sudah dikenal karakteristiknya, seperti fungsi kuaratik atau fungsi polinomial pada umumnya.
Gambar 3. Ilustrasi minimum lokal, minimum lokal tegas dan minimum global Salah satu konsep yang sangat penting dalam menemukan lokasi minimum lokal adalah arah descent (descent direction) yang didefinisikan sebagai berikut.
Definisi 1.17 Misalkan : n
f terdiferensial di titik n.
x Jika terdapat vektor
n
d sehingga
( ), 0,
f x d
(1.24)
maka d disebut arah descent dari fungsi f di titik x. Minimum Lokal Tegas
Minimum Lokal
Kondisi pada teorema berikut merupakan syarat perlu suatu fungsi f memiliki minimum lokal di titik n.
x
Teorema 1.18 (Syarat Perlu untuk Turunan Pertama)
Misalkan : D n
f kontinu terdiferensial pada himpunan buka D. Jikax*D
adalah titik minimum lokal dari (1.23) maka berlaku
0. f x (1.25)
Teorema 1.19(Syarat Perlu untuk Turunan Kedua) Misalkan Dn matriks semidefinit positif.
Teorema 1.20(Syarat Cukup untuk Turunan Kedua)
Misalkan D n
x disebut titik stasioner (titik kritis) untuk fungsi terdiferensial f, jika f x
* 0.Teorema 1.22 Misalkan n
S suatu himpunan konveks tak kosong dan fungsi
:
(2). Jika f fungsi konveks tegas maka x*Smerupakan satu-satunya titik minimum global.
1.4 Latihan
1. Misalkan A adalah matriksnon singular berukuran n n . Buktikan bahwa
1
x Ax
A
.
2. Tunjukkan dengan induksi matematika bahwa himpunan n
S adalah himpunan
adalah himpunan konveks.
4. Misalkan
2
konveks, tetapi himpunan D belum tentu himpunan konveks.BAB 2
OPTIMASI TANPA KALKULUS
(
OPTIMIZATION WITHOUT CALCULUS
)
Pembahasan tentang tehnik atau metode optimasi, biasanya kita tidak terlepas dari syarat turunan pertama dan kedua dari suatu fungsi, sistem persamaan linier, operator nonlinier, ukuran jarak dan sebagainya. Bahkan beberapa mahasiswa atau kita pada umumnya sering kali menganggap bahwa optimasi merupakan suatu topik atau pokok bahasan yang penyelesaiannya bergantung pada aplikasi dari turunan dan kalkulus pada umumnya.
Pada bab ini, kita akan mendiskusikan optimasi tanpa menggunakan prinsip dan tehnik kalukulus, khususnya teori tentang diferensial. Pembahasan tehnik atau metode optimasi pada bab ini didasarkan pada ketaksamaan rata-rata Aritmatika-Geometri dan ketaksamaan Cauchy.
2.1 Ketaksamaan Rata-Rata Aritmatika dan Geometri
Sebelum kita membahas tentang ketaksamaan yang melibatkan hubungan antara rata-rata aritmatika dan rata-rata, berikut diberikan terminologi tentang rata-rata aritmatia dan geometri secara parsial.
Definisi 2.1 Jika x x1, ,2 ,xn adalah bilangan real positif maka :
(1). Rata-rata aritmatika terhadap n data x x1, ,2 ,xn adalah
1 2 1
( n)
AM x x x
n
, (2.1.1)
(2). Rata-rata geometri terhadap n data x x1, ,2 ,xn adalah 1/ 1 2
GM ( . . . ) n n x x x
. (2.1.2)
Teorema 2.2 Misal diberikan x x1, ,2 ,xn adalah bilangan positif. Hubungan antara
rata-rata aritmatika(AM) dan rata-rata geometri (GM) diberikan oleh ketaksamaan
berikut :
Ketaksamaan (2.1.3) dikenal dengan ketaksamaan rata-rata aritmatika dan geometri (arithmetic mean-geometric mean)yang dikenal dengan AM-GM.
Teorema 2.3 Perumuman dari Ketaksamaan AM-GM
Misalkan x x1, ,2 ,xn adalah n bilangan positif dan misalkan pula a a1, 2,,anadalah bilangan-bilangan positif dengan sifat
1
Perumuman dari ketaksamaan AM-GM adalah2.2 Optimasi Menggunakan Ketaksamaan AM-GM
Ilustrasi penggunaan AM-GM untuk penyelesaian permasalahan optimasi adalah sebagai berikut :
2.2.1 Contoh 1
Tentukan nilai minimun dari fungsi f x y( , ) 12 18 xy,
x y
dengan dan x y merupakan dua bilangan positif.
Ketaksamaan pada (2.2.1) berimplikasi bahwa nilai minimum fungsi 12 18
Kesamaan pada (2.2.2) memberikan x2 dan y3 sehingga diperoleh nilai minimum untuk fungsi f x y( , ) 12 18 xy
x y
adalah 18.
2.2.2 Contoh 2
Tentukan nilai maksimum dari fungsi ( , )f x y xy(72 3 x4 )y dengan dan x y
merupakan dua bilangan positif.
Perhatikan bahwa fungsi ( , )f x y xy(72 3 x4 )y terdiri atas tiga suku, yaitu x y, , dan 72 3 x4y, serta jumlah ketiga suku-suku tersebut bukanlah suatu konstanta. Tetapi, kalau dimodifikasi menjadi 3x4y(72 3 x4 )y memberikan hasil yang konstan yaitu 72. Dengan demikian fungsi ( , )f x y dapat ditulis kembali menjadi
maksimum dari fungsi ( , )f x y terjadi jika masing-masing suku tak konstan dari fungsi( , )
f x y pada (2.2.3) adalah 24.
Akibatnya diperoleh nilai x8 dan y6. Substitusi nilai x dan y pada fungsi ( , )
f x y memberikan nilai maksimum untuk fungsi
8; 6
2.2.3 Contoh 3
Tentukan nilai minimum dari fungsi f x y( , ) 4x x2 4y
y x
dengan dan x y
merupakan dua bilangan positif.
Untuk kasus ini, tulis fungsi f x y( , ) 4x x2 4y
Selanjutnya, tulis kembali fungsi ( , )f x y sebagai berikut
2
Selanjutnya, berdasarkan ketaksamaan AM-GM berlaku
Dengan menulis kembali (2.2.4) menjadi
2
Berdasarkan persamaan (2.2.5) dan (2.2.6) maka diperoleh 1 ( , ) 2
4 f x y . Dengan
demikian diperoleh nilai minimum dari fungsi ( , )f x y adalah 8, yaitu ketika masing-masing suku pada (2.1.5) bernilai 2.
2.3 Ketaksamaan Cauchy Definisi 2.4 Misalkan , n
1 1 2 2
, n n
x y x y x y x y . (2.3.1)
(2). Norma vektor xndidefinisikan dengan
,
x x x . (2.3.2)
Definisi 2.5 Misalkan , n
x y dengan x
x x1, 2,,xn
dan y
y y1, 2,,yn
.Ketaksamaan Cauchy berkaitan dengan vektor x dan y memenuhi
,
x y x y (2.3.3)
Ruas kiri akan sama dengan ruas kanan, jika terdapat asehingga xay.
Permasalahan optimasi yang menggunakan ketaksamaan Cauchy sebagai alat penyelesaiannya diperlihat oleh contoh-contoh berikut ini.
Contoh 1.
Tentukan nilai terbesar dan terkecil dari fungsi
( , , ) 2 3 6 ,
f x y z x y z (2.3.4)
jika titik ( , , z)x y memenuhi 2 2 2 1
x y z .
Berdasarkan ketaksamaan Cauchy, kita peroleh
2 2 2 2 2 2 2
(2 3 6 )(x y z ) (2 x3y6 ) ,z (2.3.5) Karena syarat x2y2z2 1maka ruas kiri pada (2.3.5) sama dengan 49. Akibatnya nilai fungsi ( , , z)f x y berada pada interval [ 7,7] dan kesamaan pada (2.3.5) terjadi ketika vektor (2,3,6) paralell terhadap vektor ( , , )x y z , yaitu
2 3 6
x y z
. (2.3.6)
Kesamaan (2.3.6) memberikan xt, 3 2 ,
y t dan z3t dengan 2 4 9.
t Akibatnya, nilai terkecil dari ( , , )f x y z 7, pada saat nilai 2
7
x dan nilai terbesar dari
( , , ) 7
f x y z , ketika nilai 2.
7
Contoh 2.
Permasalahan mendasar pada teori estimasi adalah mengestimasi nilai konstanta c, jika diberikan sejumlah J data zj c vj, 1, 2,j ,J dengan vj,j merupakan variabel acak yang merepresentasikan suatu gangguan (noise) atau kesalahan pengukuran (measurement error). Jika diasumsikan nilai harapan (ekspetasi) untuk nilai vj,j adalah E v( )j 0, nilai vj,j tidak saling berkorelasi atau E v v( , )j k 0, untuk jk dan varians dari vjadalah
2 2 ( )j 0. E v Estimator linier untuk c diberikan oleh
1
Dengan demikian, ini berarti bahwa bj harus meminimumkan
2 2
dengan kendala
1
Untuk menyelesaikan permasalahan ini, kita akan menggunakan ketaksamaan Cauchy. Pandang kesamaan
Ketaksamaan Cauchy memberikan
dengan tanda sama dengan terpenuhi jika dan hanya jika terdapat suatu konstanta, sebut
Berdasarkan persamaan (2.3.9) diperoleh
2
Akhirnya memberikan nilai untuk estimator
2
2.4 Hasil Kali Dalam untuk Matriks Bujur Sangkar
Trace untuk suatu matriks persegi M, notasi trM, adalah jumlah elemen-elemen matriks M yang berada di bawah diagonal utamanya. Jika diberikan matriks persegi A dan B atas lapangan (semua elemennya merupakan bilangan real).
Trace dari perkalian matriks T
B A mendefinisikan hasil kali dalam, , ( TA).
A B tr B
Hasil kali dalam pada matriks dapat digunakan untuk mendefinisikan norma pada matriks, yang dikenal dengan norma Frobenius, yaitu :
, ( T ).
A A A tr A A (2.4.1)
Berikut akan diberikan sebuah teorema yang berlaku pada suatu matriks simetri (Teorema Fan). Namun sebelum itu akan diuraikan dulu beberapa terminologi yang akan digunakan dalam teorema tersebut.
Misalkan S adalah suatu matriks simetris. Definisikan ( ) n, ( )
1, 2, ,
nS S
adalah vektor yang elemen-elemennya merupakan nilai eigen dari matriks simetris S,
dan D( ( )) S merupakan matriks diagonal yang elemennya adalah elemen dari ( ) S . Berdasarkan definisi ini, dapat ditunjukkan bahwa
( )
S S . (2.4.2)
Misalkan pula
( )S
menyatakan vektor dari nilai eigen S yang diurut dengan urutan tidak naik.Teorema 2.6 (Teorema Fan)
Jika S dan R adalah dua matriks simetris sebarang maka berlaku
( ) [ ( )],[ ( )] , tr SR S R
dengan tanda sama dengan terpenuhi jika dan hanya jika terdapat matriks ortogonal U
sedemikian hingga
([ ( )]) T,
SUD S U
dan
([ ( )]) T.
RUD R U
Akibat dari Teorema Fan, jika matriks S dan R adalah matriks diagonal, maka berlaku ( ), ( )S R [ ( )],[ (R)]S
2.5 Latihan
1. Misalkan A menyatakan rata-rata aritmatika dari himpunan berhingga bilangan positif P, dengan x dan y berturut-turut menyatakan unsur terkecil dan terbesar dari himpunan P.
Buktikan bahwa xy A x( y A), dan kesamaan terjadi jika dan hanya jika .
x y A
2. Minimumkan fungsi
2 2
1 4
( ) 4
f x x x
x x
untuk setiap x bilangan positif.
Petunjuk : pandang dua suku pertama dan dua suku terakhir secara terpisah.
3. Tentukan nilai maksimum dari fungsi 2 ( , ) ,
f x y x y jika x dan y memenuhi 6x5y45.
Petunjuk : Tulis 6x3x3x.
4. (Ketaksamaan Young) Misalkan p dan q adalah bilangan positif yang lebih besar dari 1 dan memenuhi 1 1 1.
p q Jika x dan y adalah dua bilangan positif maka
,
p q
x y xy
p q
dengan kesamaan terjadi jika dan hanya jika p q.
x y
BAB 3
OPTIMASI TANPA KENDALA
(
UNCONSTRAINED OPTIMIZATION
)
Permasalahan optimasi tanpa kendala dapat dibedakan atas dua metode, yaitu metode pencarian (search methods) dan metode gradien (gradient methods). Namun secara umum, khususny untuk permasalahan multidimensi, metode pencarian kurang efisien. Oleh karenanya pada buku ini hanya akan dibahas tentang metode gradien.
Metode gradien merupakan salah satu metode optimasi yang berdasarkan pada informasi gradient fungsi yang akan dioptimalkan pada suatu titik tertentu. Pada bagian ini, kita akan fokus pada tiga metode gradien yang umum yaitu :
(a). Metode Steepest-Descent (b). Metode Newton
(c). Metode Gauss-Newton
3.1 Metode Steepest-Descent
Misal diberikan suatu permasalahan optimasi
F = ( ), untuk n.
Min Min f x x (3.1.1)
Berdasarkan aturan pada Deret Taylor,
1 2
( ) ( ) T T ,
F F f x f x g H (3.1.2)
dan 0. Perubahan F dalam fungsi diberikan oleh
. T
F g
(3.1.3)
Operasi kali pada ruas kanan (3.1.3) adalah kali skalar atau hasil kali dalam (dot product) antara vektor g dan vektor .
Jika
1g2
T ng g g dan
1 2
T n1
cos n
i i i
F g g
dengan menyatakan sudu antara vektor g dan vektor , dan
12 . T
g g g (3.1.4)
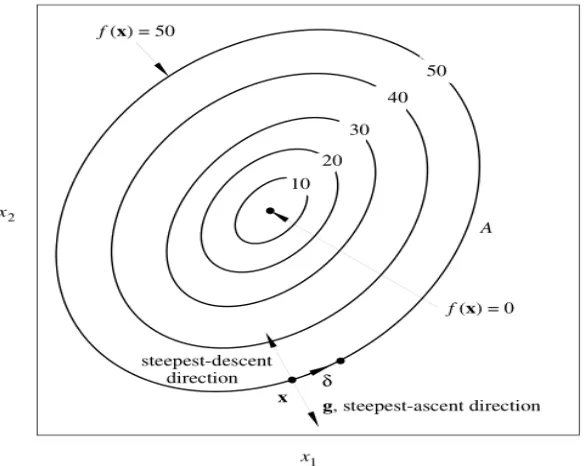
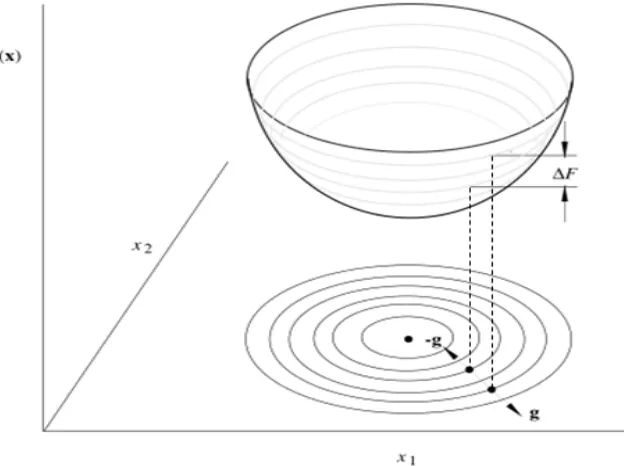
3.1.1 Arah Ascent dan Descent
Perhatikan plot kontur pada Gambar 3.1. Jika x dan x dua titik yang berdekatan pada kontur A, maka untuk 0 berlaku
cos 0
F g
(3.1.5)
Karena F merupakan konstanta pada kontur. Dengan demikian dapat disimpulkan bahwa besaran sudut antara vektor g dan vektor sama dengan 900. Akibatnya gradien di titik x adalah ortogonal dengan kontur A, seperti yang diilustrasikan pada Gambar 3.1. Selanjutnya, untuk setiap , F bernilai maksimum (positif) jika 0, dan merupakan arah dari fungsi g.
Pada sisi lain, F bernilai maksimum (negatif) jika , dan menyatakan arah dari fungsi g. Gradien gdan gberturut-turut menyatakan arah steepest ascent dan steepest descent. Secara mendasar definisi terkait dengan hal ini diberikan sebagai berikut.
3.1.2 Metode Dasar
Misalkan f x( ) adalah fungsi kontinu di sekitaran titik x. Jika d menyatakan arah steepest-descent di titik X di titik x, yaitu
d g maka perubahan sebesar di titik x diberikan oleh
,
d
untuk suatu 0
akan mengurangi nilai fungsi ( ).f x Maksimum pengurangan nilai fungsi ( )f x dapat dipandang sebagai permasalahan mencari solusi permasalahan
( )
Min F f x d
(3.1.6)
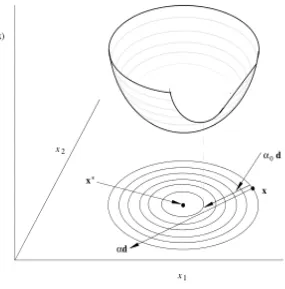
sebagaimana diilustrasikan seperti pada Gambar 3.2 dan Gambar 3.3.
Gambar 3.3 Arah Steepest Descent dan Steepest Ascent. Sumber : Antoniou dan Lu (2007:122).
Jika keadaan dari suatu titik x ke suatu titik optimum x* yang menyebabkan nilai f(x) minimum, maka melalui metode stepest descent arah pencarian ditentukan oleh nilai seperti diilustrasikan pada Gambar 3.3. Akibatnya, permasalahan dimensi banyak (multi-dimensional) semula dapat diselesaikan dengan permasalahan dimensi satu Persamaan (3.1.1).
Pada kenyataannya, d bukanlah titik yang berada pada arah x* dan selanjutnya prosedur iterasi harus digunakan untuk menentukan solusi yaitu x*. Dimulai dari titik
0,
x arah d d0 g dapat ditentukan dan nilai yang meminimumkan
0 0 0
f x d , sebut 0 dapat ditentukan. Selanjutnya titik x1 x0 0 0d dapat ditentukan dan selanjutnya dapat dilanjutkan melalui proses iterasi
1 .
k k k k
x x d (3.1.7)
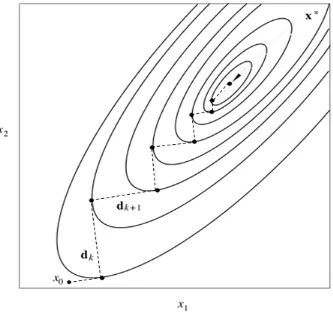
positif kecil. Proses iterasi ini seperti diilustrasikan pada Gambar 3.4. Perhatikan bahwa pola trayektori dari titik awal menuju titik solusi mengikuti pola zig-zag tetapi saling tegak lurus.
Gambar 3.4 Arah Steepest Descent dan Steepest Ascent. Sumber : Antoniou dan Lu (2007:124).
Algoritma Steepest-Descent adalah sebagai berikut : Langkah 1.
Input x0 dan tetapkan nilai toleransi (bilangan positif cukup kecil).
Tetapkan k = 0;
Langkah 2.
Hitung gradien gk dan tetapkan dk gk. Langkah 3.
Tentukan k, nilai yang meminimumkan f x( kdk)
Langkah 4. memberikan formula penentuan nilai k, jika diberikan H matriks Hessian untuk ( )f x adalah dengan menggunakan formula (Antoniou dan Lu, 2007:125) :
Algoritma Steepest-Descent tanpa Line Search : Langkah 1.
Input x1 dan tetapkan nilai toleransi (bilangan positif cukup kecil).
Langkah 2.
Hitung gradien gk.
Langkah 3.
Tetapkan dk gkdan k k1.
Hitung f f x( k gk).
Tentukan nilai k berdasarkan Persamaan (3.1.10) Langkah 4.
untuk m menyatakan nilai eigen terkecil dari Hessian Hk dan Mmenyatakan nilai eigen terbesar dari Hessian Hk.
3.2 Metode Newton
Metode Newton (Newton-Raphson) dibangun berdasarkan aproksimasi kuadratik dari deretTaylor. Jika menyatakan gangguan untuk titik x, fungsi
Turunan fungsi (f x) respek terhadap parameter k,k 1, 2,,n dan seting hasil turunan tersebut sama dengan nol akan memberikan kyang meminimumkan nilai fungsi (f x), yaitu :
2 1
0, untuk 1, 2, , n
i i
k i k
f f
k n
x x x
(3.2.2)Dalam notasi matriks , Persamaan (3.2.2) dapat ditulis
g H Atau,
1
H g
(3.2.3)
Persamaan (3.2.3) memiliki solusi, jika memenuhi kondisi berikut ini. 1) MatriksHessian non singular.
2) Aproksimasi pada Persamaan (3.2.1) valid.
Secara sederhana, metode Newton-Raphson merupakan suatu metode optimasi untuk meminimumkan suatu fungsi : n ,
f yaitu menentukan variabel x* sedemikian hingga f x( ) 0.*
3.2.1 Metode Newton untuk Satu Variabel
Pada kasus ini, permasalahan optimasi yang dilakukan adalah meminimumkan fungsi satu variabel. Misal fungsi :f diberikan dan akan diminimumkan, yaitu mencari x*yang meminimumkan fungsi f , yaitu f x( )* f x( ) untuk setiap
.
x D Untuk mencari x*dilakukan dengan menyelesaikan persamaan f x'( ) 0. Seting g(x) f x'( )dan terapkan metode Newton-Rapson pada fungsi ( ).g x Oleh karenanya, permasalahan ini dapat dipandang sebagai permasalahan mencari x*
1
3.2.2 Metode Newton untuk Multivariabel
Algoritma Newton-Raphson untuk menentukan akar dari fungsi : n n
f
mengikuti iterasi berikut ini :
11 [ ]( ) ( ),
k k k k
x x J g x g x (3.2.6)
dengan J[g x]( )menyatakan matriks jacobian dari turunan parsial orde satu, j ( ),k j tentukan akar dari fungsi g. Kemudian, tahapan iterasi Algoritma Newton-Raphson diberikan oleh
1
J[ adalah matriks Hessian dari turunan parsian kedua dari fungsi f.
Selanjutnya, jika 2
( ), dan ( ) merupakan arah descent karena memenuhi T T 1 0
k k k k k
Algoritma Metode Newton
Langkah 1.
Input x0n dan tetapkan nilai toleransi (bilangan positif cukup kecil).
Tetapkan k = 0
Langkah 2.
Jika gk , maka slesai! Langkah 3.
Selesaikan Gk gk untuk setiap sk Langkah 4.
Tetapkan xk1xksk; dan hitung fk1 f x( k1).
Langkah 5.
Tetapkan k k 1, dan ulangi langkah 2-4.
Teorema berikut memberikan syarat cukup untuk konvergensi metode Newton. Teorema 3.1 [Teorema Konvergensi Metode Newton (Sun dan Yuan, 2006)]
Misalkan f C2 dan x cukup dengan solusi permasalahan minimasi k
*
x dengan
* ( ) 0.
g x Jika matriks Hessian G x definit positif dan ( )* G x memenuhi kondisi ( )
Lipschitz,
( ) (y) , untuk suatu dan , ij ij
G x G xy i j (3.2.9)
dengan G x menyatakan elemen baris ke-i dan kolom ke-j pada matriks G(x) maka ij( )
untuk setiap k, algoritma Newton (3.2.8) adalah well-defined; dibangun oleh barisan
xk konvergen ke *.x
3.3 Metode Gauss-Newton
Pada banyak permasalahan optimasi, fungsi obyektif diberikan dalam bentuk fungsi terhadap vektor,
1 2
[ ( ) ( ) ( )]T m
Dengan ( ), 1, 2,f xj j ,m adalah fungsi dengan variabel bebas x.
Pada permaalahan seperti ini, fungsi bernilai real F dapat ditulis dalam bentuk 2
Pada kasus ini, jika F dapat diminimumkan menggunakan algoritma multi-dimensi tanpa kendala, maka fungsi f xj( ) secara individu adalah minimum dalam bentuk
least-squares. Metode mencari solusi optimal untuk kasus seperti ini dikenal dengan metode Gauss-Newton.
Jika diberikan sejumlah fungsi, f xj( ), j1, 2,,m dengan n
x , maka matriks Jakobian diberikan oleh
1 1 1
Bilangan m yang menyakan banyaknya fungsi mungkin saja lebih banyak dari jumlah variabel elemen x, yaitu bilangan n.
Melalui pendiferensialan fungsi F pada Persamaan (3.3.2) respek terhadap variabel , 1, 2,x ii ,n memberikan
Dalam bentuk matriks dapat ditulis
Sehingga gradien dari fungsi F, notasi gF, diberikan oleh 2 T
F
g J f (3.3.4)
Jika diasumsikan bahwa 2 ( ) maka Persamaan (3.3.5) menjadi
2
Selanjutnya, Hessian dari matriks F, notasi HF, dapat diperoleh 2 T
F
H J J (3.3.7)
Karena gradien dan Hessian dari F sudah diketahui, maka relasi rekursif metode Newton diberikan oleh persamaan berikut ini.
1
Sebelum Algoritma Newton dibahas, berikut akan diberikan Algoritma Matthews dan Davies sebagai algoritma yang mendasari Algoritma Newton, sebagai berikut :
Set m=k-1, lmm 1. If hmm 0, set hmm h00.
Langkah 2.1
For ik k, 1,,n do:
Set ljm hjm /hmm, hjm 0.
Langkah 2.1.1
For t=k, k+1, ... , n do: Set hit hitl him mt
If 0hkk h00, set h00hkk. Langkah 3.
Set lnn 1.
If hnn0, set hnn h00.
For i=1,2, ... , n set dii hii.
Selesai !
Selanjutnya, Adapun Algoritma Newton sebagaimana yang telah diuraikan di atas adalah sebagai berikut :
Algoritma Metode Gauss-Newton Langkah 1.
Input x0n dan tetapkan nilai toleransi (bilangan positif cukup kecil).
Tetapkan k = 0
Langkah 2.
Hitung fjk f xj( ), k j1, 2,,m dan Fk Langkah 3.
Hitung , 2 T , k k k k
J g J f dan 2 T . k k k
H J J
Langkah 4.
Hitung Lkdan Dk menggunakan algoritma Matthews dan
Davies.
Hitung yk L gk k dan 1 T
k k k k
d L D y .
Langkah 5.
Tentukan k, nilai yang meminimumkan F x( k dk).
Langkah 6.
Hitung fj k( 1),untuk j1, 2,,m dan Fk1
Langkah 7.
Jika Fk1Fk maka kerjakan
Output x*xk1, fj k( 1)( )x* untuk j1, 2,,m dan Fk1.
Selesai. Jika Tidak,
3.4. Latihan
1. Gunakan metode Steepest-Descent untuk menyelesaikan permasalahan berikut :
(a). 2 2 2. Untuk soal No. 1.(b) : dengan menggunakan induksi, tunjukkan bahwa
1
Selanjutnya, tentukan titik x* sedemikian hingga nilai (x)f minimum. 3. Diberikan masalah minimasi
2 2
1 2 1 2 1 2
min 0, 2x x x x 2, 2x 2, 2x 2, 2.
(a). Tentukan titik x* yang memenuhi kondisi turunan pertama, yaitu *
'( ) 0.
f x
(b). Tunjukkan bahwa titik x*pada (a) merupakan titik minimum global ! (c). Jika titik awal, 0
0 0
x
, berapa banyak iterasi steepest-descent dilakukan agar dicapai titik optimal dengan 10 .10
4. Selesaikan permasalahan minimasi,
2 2 2 2 2 2 2
1 2 3 1 2 1 3
( ) ( 5) ( 8) ( 7) 2 4
f x x x x x x x x ,
menggunakan algoritma steepest-descent.
(a). Mulai dengan x0
1 1 1
Tdan 10 .6 Verifikasi solusi tersebut dengan menggunakan kondisi turunan kedua.(b). Sama dengan no. (a), dengan x0
2,3 0 0 .
T (c). Sama dengan no. (a), dengan x0
0 2 12 .
T 5. Selesaikan permasalahan minimasi berikut2 2 2 2
1 2 1 2
( ) ( 1) ( 1)
jika 106 dengan titik awal
4 4 ,
T 4 4 , 4
T 4 , dan
T
4 4
T menggunakan algoritma steepest-descent, kemudian bandingkan hasilnya jika menggunakan algoritma Steepest-Descent tanpa Line Search.BAB 4
OPTIMASI BERKENDALA
(
CONSTRAINED OPTIMIZATION
)
Pada bab ini akan diuraikan beberapa hal yang terkait dengan prinsip, metode, dan algoritma yang berkaitan dengan permasalahan optimasi dengan kendala (constrained optimization).
4.1 Kendala
Bentuk umum permasalahan optimasi berkendala adalah menentukan vektor * n
x yang meminimumkan suatu fungsi,
( ),
Min f x (4.1.1)
dengan kendala (subject to) :
1( ) 0, untuk 1, 2, , .
a x i p (4.1.2)
( ) 0, untuk 1, 2, , . j
c x j q (4.1.3)
Kesamaan pada (4.1.2) disebut kendala persamaan (equality constraints) dengan dan ketaksamaan pada (4.1.3) disebut kendala pertidaksamaan (inequality constraints).
Permasalahan optimasi dengan fungsi obyektif/fungsi tujuan (objective function) dan kendala (4.1.2) dan (4.1.3) yang diasumsikan mempunyai turunan kedua dan
kontinu, yaitu 2
( ), ( ) untuk 1, 2, , dan 1, 2, , . i j
a x c x C i p j q Misalkan D menyatakan daerah feasibel untuk permasalan (4.1.1), yaitu himpunan semua titik-titik yang memenuhi (4.1.2) dan (4.1.3) :
| ( )i 0, untuk 1, 2, , dan ( ) 0, untuk j 1, 2,j , q
D x a x i p c x (4.1.4)
4.1.1 Kendala Persamaan
Misalkan beberapa kendala persamaan diberikan 1( ) 0
( ) 0 p
a x
a x
mendefinisikan suatu permukaan (hypersurface) pada n.
Dalam notasi vektor, Persamaan (4.1.5) dapat ditulis menjadi
1 2
( ) [ ( ) ( ) ( )]T 0. p
a x a x a x a x (4.1.6)
Defini 4.1
Suatu titik x disebut titik regular (regular point) dari kendala (4.1.5), jika titik x
memenuhi Persamaan (4.1.5) dan vektor kolom a x1( ),a x2( ),,a xp( ) adalah
bebas linear.
Berdasarkan Definisi 4.1, Suatu titik regularxdari suatu kendala persamaan, jika titik xtersebut memenuhi kesamaan (4.1.5) dan matriks Jacobian
1 2
memiliki rank baris yang penuh. Karena n
x maka matriks Jacobian Jeberukuran np. Oleh karenanya, agar titik n
x
menjadi titik regular dari kendala (4.1.5) maka haruslah ukuran pn. Selanjutnya, jika pn, pada banyak kasus jumlah vektor n
x yang memenihi Persamaan (4.1.5) adalah finit dan permasalahan optimasi (4.1.1) mempunyai solusi trivial.
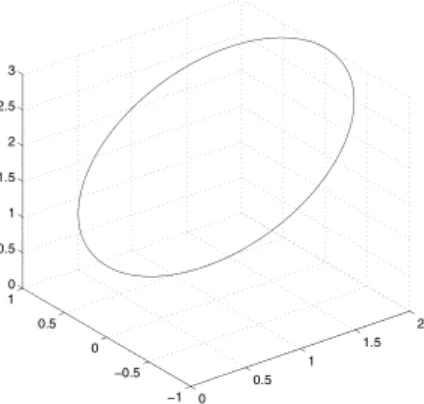
Contoh 4.2
Diskusikan dan sketsalah daerah feasibel yang memenuhi kendala persamaan berikut : 1 3 1 0
Matriks Jacobian untuk kendala (4.1.7a) dan (4.1.7b) adalah sebagai berikut :
1 2
Perhatikan, Kesamaan pada (4.1.7b) dapat ditulis kembali menjadi
2 21 1 2 1
x x (4.1.8)
Dalam bentuk persamaan parameter dalam t, Persamaan (4.1.8) dapat ditulis menjadi 1 1 cos( )
x t (4.1.9a)
2 sin( )
x t (4.1.9b)
jika Persamaan (4.1.9) dihubungkan dengan Persamaan (4.1.7a) akan memberikan 3 2 cos( )
x t (4.1.9c)
Persamaan parameter (4.1.9a)-(4.19c) dengan parameter t pada [0, 2 ] menghasilkan kurva seperti pada Gambar 4.1 berikut ini.
Gambar 4.1 Kurva representasi dari kendala Persamaan (4.1.7)
Pada kasus tertentu, permasalahan optimasi memiliki kendala ( )a xi semuanya dalam bentuk persamaan linear. Oleh karenanya, Persamaan (4.1.5) menjadi sistem persamaan linear yang dapat diekspresikan menjadi
Axb (4.1.10)
dengan p n
A yang secara numerik sama dengan Jacobian, yaitu AJe, dan 1
p
adalah titik regular, jika rank(A) = p. Jika rank(A) = p’< p, maka terdapat dua kemungkinan yaitu :
Jika Persamaan (4.1.11) terpenuhi, maka terdapat kontradiksi diantara kesamaan yang ada pada sistem (4.1.11). Oleh karena perlu dilakukan reduksi untuk menghilangkan yang dua atau lebih kesamaan yang kontradiksi tersebut. Jika Persamaan (4.1.12) yang terpenuhi dengan rank(A) = p’maka dengan manipulasi aljabar Persamaan (4.1.10) dapat direduksi menjadi sistem yang ekivalen yang terdiri atas p’kendala kesamaan linear, yaitu
Ketika rank(A) = p’, secara numerik terdapat cara untuk mereduksi Persamaan (4.1.10) menjadi (4.1.13) yaitu dengan menerapkan singular-value decomposition
Sederhanakan kendala persamaan berikut ini: 1 2 3 4
Persamaan (4.1.16), dapat ditulis dalam notasi matriks Axb sebagai berikut : 1 pada (4.1.16) dapat direduksi menjadi 2 kesamaan saja, melalui penerapan SVD pada matriks A dengan
0, 2717 0,8003 0,5345 0,1365 0,5818 0,8018 0,9527 0,1449 0, 2673 U
0,1463 0,3171 0, 6331 0, 6908 0, 6951 0, 6284 0,3161 0,1485 0, 6402 0,3200 0, 6322 0, 2969
Selanjutnya, berdasarkan Persamaan (4.1.14) dan (4.1.15) diperoleh
1 2 3 4
2,1770x 10,3429x 9,5255x 4,3540x 5, 7135 (4.1.17a)
1 2 3 4
0,5106x 1, 0118x 0,5152x 1, 0211x 3, 0587
4.1.2 Kendala Pertidaksamaan
Pada sub bab ini akan diuraikan tentang permasalahan optimasi dengan kendala pertidaksamaan. Diberikan himpunan kendala sebagai berikut :
1 2
( ) 0 ( ) 0
( ) 0 q
c x c x
c x
(4.1.18)
Berbeda dengan banyaknya kendala sama dengan, banyaknya kendala pertidaksamaan,
q, tidak harus lebih kecil dari banyaknya komponen x, yaitu n. Sebagai contoh, jika diberikan suatu kasus dengan kendala ( ),c xj untuk setiap 1 j q sebagai fungsi linear maka kendala pada (4.1.18) merepresentasikan polihedron dengan q facets dan
banyaknya facets pada polihedron adalah tak berhingga (unlimited).
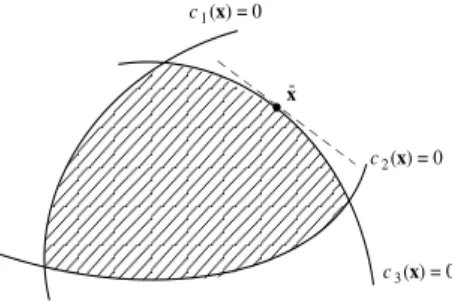
Terhadap kendala pertidaksamaan, terdapat dua isu pokok yang termuat pada (4.1.18). Berkaitan dengan titik feasibel x, kendala pertidaksamaan (4.1.18) dapat dibagi dua klasifikasi, yaitu himpunan kendala dengan ( )c xj 0 dan himpunan kendala dengan ( )c xj 0. Himpunan kendal dengan sifat ( )c xj 0disebut dengan kendala aktif (active constraints) himpunan kendala dengan sifat ( )c xj 0 disebut dengan kendala tidak aktif (inactive constraints). Sebagai ilustrasi perhatikan Gambar 4.2 berikut ini.
Berdasarkan ilustrasi pada Gambar 4.2, c x1( ) dan c x2( ) merupakan kendala tidak aktif, dan kendala c x3( ) merupakan kendala aktif.
Pendekatan lain berkaitan dengan kendala pertidak samaan adalah mengkonversi kendala tersebut menjadi kendala sama dengan. Sebagai ilustrasi, diberikan permaslahan optimasi sebagai berikut :
( ), n
Min f x x , (4.1.19a)
dengan kendala : c xi( ) 0, untuk i1, 2,,q. (4.1.19b) Kendala pada (4.1.19b) dapat ditulis dalam bentuk lain, yaitu
Kendala (4.1.20b) dapat dieliminasi menggunakan substitusi variabel
2
, untuk 1 . i i
y y i q
Jika kita misalkan
maka permasalahan optimasi (4.1.19) dapat ditulis menjadi
( ), n q
Min f x xE (4.1.21a) dengan kendala :
( ) 0, untuk 1, 2, , i
c x i q (4.1.21b)
Sebagai ilustrasi, kita dapat menuliskan kendala pertidaksamaan (4.1.18) dalam bentuk matriks sebagai berikut :
0
Cx (4.1.22)
dengan q n dan .q1
C d Misalkan D
x Cx| d
dan asumsikan bahwa 1, 2 .x x D Untuk
0,1 , titik xx1 (1 )x2 memenuhi Persamaan (4.1.22) karena1 (1 ) 2
(1 )
Cx Cx Cx
d d d
(4.1.23)
Dengan demikian , Cxdmendefinisikan suatu himpunan konveks.
4.2 Klasifikasi Permasalahan Optimasi Berkendala
Sebelum kita membahas tentang klasifikasi permasalahan optimasi berkendala, berikut diberikan beberapa terminologi yeng berperan dalam diskusi tentang hal tersebut. Pada pembahasan selanjutnya, himpunan D menyatakan daerah feasibel untuk permasalahan optimasi (4.1.1)-(4.1.3), dan himpunan *
* : x
B x xx untuk suatu 0disebut bola yang berpusat di x* dengan jari-jari .
Definisi 4.4 Titik x disebut titik minimum lokal untuk permasalahan optimasi (4.1.1)-* (4.1.3), jika terdapat bola B sehingga x* Dx* Bx*D bukan himpunan kosong dan
*
*( ) min ( ) : x . f x f x xD
Definisi 4.5 Titik x disebut titik minimum lokal untuk permasalahan optimasi (4.1.1)-* (4.1.3), jika x*D dan f x( )* min
f x( ) :xD
.Definisi 4.6 Titik x disebut titik minimum lokal kuat * (strong local minimizer) jika
terdapat bola B sehingga x* Dx* Bx*D bukan himpunan kosong dan *
x adalah titik
pembuat minimum pada Dx*
4.2.1 Program Linear (Linear Programming)
( ) T
Min f x c x (4.2.1a)
dengan kendala :
Axb (4.2.1b)
0
x (4.2.1c)
untuk suatu n1, p n, dan p 1.
c A b Pada permasalahan LP, kita ingin menentukan vektor x*yang meminimumkan fungsi tujuan ( )f x dengan kendala berupa fungsi linear pada (4.2.1b) dan kendala (batasan) non negatif pada (4.2.1c).
Selanjutnya, permasalahan LP dapat juga diberikan dalam bentuk tidak standar berikut ini.
T
Min c x (4.2.2a)
dengan kendala :
Axb . (4.2.2b)
Dengan menggunakan variabel dummy (slack variable) vektor yAx b , maka Persamaan (4.2.2b) dapat ditulis menjadi
Ax y b (4.2.3a)
dan
0
y . (4.2.3b)
Selanjutnya, jika kita ekspresikan variabel x sebagai selisih dua variabel non negatif, vektor x 0dan vektor x 0, yaitu :
xxx dan misalkan
x x x y
maka fungsi tujuan (4.2.2a) menjadi
0
T
T T
c x c c x
A A I x
b dan x0.Berdasarkan konstruksi variabel di atas, permasalahan optimasi tidak standar dapat ditulis dalam bentuk standar sebagai berikut :
T
Min c x (4.2.4a)
dengan kendala
Axb (4.2.4b)
0
x (4.2.4c)
dengan dan
.0 c
c c A A A I
4.2.2 Program Kuadratik (Quadratic Programming)
Bentuk umum dari permasalahan kuadratik (QP) adalah sebagai berikut : 1
min ( ) 2
T T
f x x Hxx pc (4.2.5a)
dengan kendala
Axb (4.2.5b)
Cxd (4.2.5c)
Pada banyak kasus , Hessian dari fungsi f(x), H, adalah semidefinit positif. Hal ini berimplikasi bahwa ( )f x fungsi konveks dan daerah feasibel yang ditentukan oleh Persamaan (4.2.5b) dan (4.2.5c) selalu konveks.
4.2.3 Program Konveks (Convex Programming)
Terdapat beberapa tipe atau model permasalahan CP, namun pada bab ini kita akan mendiskusikan model yang sering digunakan dalam penerapan sains dan teknik yaitu :
4.2.4 Bentuk Umum Permasalahan Optimasi Berkendala
Permasalahan optimasi berkendala (4.1.1)-(4.1.3) dapat dipandang sebagai permasalahan optimasi dalam bentuk umum (GCO), jika ( )f x berupa fungsi nonlinear berorde lebih besar dari orde dua, dan bukan konveks global atau paling sedikit terdapat satu kendal yang tidak konveks.
Contoh 4.7 Diberikan permasalahan optimasi berikut
2 3
dengan kendala :
1
Selidiki apakah permasalahan tersebut di atas termasuk dalam kelas GCO. Solusi :
3 2 pada titik x, sehingga ( )f x tidak konveks pada daerah feasibel dan permasalahan optimasi di atas termasuk dalam GCO.
4.3 Metode Transformasi
Metode transformasi merupakan salah satu metode penyelesaian masalah optimasi berkendala ke dalam permasalahan optimasi tanpa kendala.
4.3.1 Eliminasi Variabel
4.3.1.1 Kendala Persamaan Linear Diberikan permasalahan optimasi
min ( )f x (4.3.1a) semua solusi Persamaan (4.3.1b) dengan karakterisasi
[ n ]
xA b I A A (4.3.2) Dengan A menotasikan pseudo-invers Moore-Penrose dari A, In matriks identitas berukuran nn, dan adalah vektor parameter berdimensi sebarang. Solusi yang diekpresikan oleh Persamaan (4.3.2) dapat disederhanakan menggunakan dekomposisi SVD. Selanjutnya, karena matriks A mempunyai rank penuh, rank A( ) p, dekomposisi SVD menghasilkan