DESAIN ALAT PENYIRAM BIBIT TANAMAN MENGGUNAKAN
MIKROKONTROLLER AT89C52 DENGAN MELALUI SUMBER
ENERGI MATAHARI
R.B. Moch. Gozali, ST.,MT (1)(1) Dosen Jurusan Teknik Elektro, Fakultas Teknik Universitas Jember
Alamat Korespondensi:
R.B. Moch. Gozali, ST.,MT, Dosen Jurusan Teknik Elektro, Fakultas Teknik Universitas Jember, Jl. Slamet Riyadi 62 Jember 68111
Abstrak - Pertumbuhan dan perkembangan tanaman bisa terhambat atau terganggu karena kebutuhan air pada tanaman tidak tercukupi atau keberadaan air tanah yang berlebihan, Suatu upaya yang dilakukan dalam manjaga kondisi tanah sebagai media tumbuh tanaman khususnya pada masa pembibitan agar tidak sampai mengalami kekeringan dan kelebihan air adalah dengan pembuatan alat penyiram tanaman dengan kontrol automatik (pompa irigasi otomatik), dimana alat ini khusus untuk irigasi /penyiraman tanaman pada masa pembibitan. Alat Penyiram Bibit Tanaman Secara Otomatis dengan Tenaga Surya merupakan rangkaian elektronik yang terdiri dari 8 bagian utama selain pompa irigasi sebagai alat yang di kontrol. Bagian tersebut antara lain : rangkaian kontrol yang berupa mikrokontroller, rangkaian sensor, rangkaian pengkonversi dari analog ke digital, modul surya dari transistor 2N3055 sebagai sumber tegangan, baterai , inverter sebagai pengubah tegangan DC ke AC, rangkaian saklar elektronik dan driver motor stepper. Alat ini dioperasikan dengan sumber listrik yang berasal dari sinar matahari yang telah dirubah ke tegangan bola-balik melalui Inverter. Jadi alat ini dapat diterapkan pada tempat yang tiadak terdapat aliran listrik. Pusat kontrol dari alat ini terletak pada Mikrokontroller AT89C52, dimana mikrokontroller ini bertugas untuk memantau cukup atau kurangnya persediaan air melalui sensor yang terbuat dari dua buah probe karbon, yang ditempatkan pada salah satu pollibag. Disamping itu mikrokontroller juga berfungsi untuk mengontrol arah dari modul surya melalui motor stepper agar modul surya dapat memperoleh sinar matahari secara optimal.
Pada masa penanaman, tahap pembibitan adalah tahap yang menentukan baik dan tidaknya hasil dari bibit tanaman nantinya. Pada tahap ini, pertumbuhan tanaman harus benar-benar dijaga. Salah satu faktor yang menunjang terhadap keberhasilan tahap pembibitan tersebut adalah irigasi. Dengan irigasi yang cukup dan terkontrol diharapkan dapat menghasilkan suatu bibit tanaman yang bermutu
atau berkualitas baik.
Sifat-sifat listrik seperti konduktansi, dan kapasitansi banyak digunakan untuk menunjukkan kadar air dalam tanah, karena perubahan kadar air dalam tanah akan berpengaruh terhadap besaran sifat-sifat listrik tersebut. Sifat-sifat listrik tersebut, selanjutnya dapat diolah secara elektronik untuk menghasilkan suatu kontrol otomatis sehingga kadar
air dalam tanah dapat mencapai kondisi yang di inginkan.
Untuk pembibitan yang dilakukan pada lahan yang jauh dari jaringan listrik, maka digunakan modul surya yang berfungsi menghasilkan listrik dengan cara mengubah energi matahari menjadi energi listrik.
Dalam penelitian ini digunakan Mikrokontroller AT89C52 sebagai kontrol mikro yang berfungsi untuk menjaga ketersediaan air dalam tanah dan untuk mengontrol arah dari modul surya agar dapat menyerap energi matahari sacara maksimal, Dalam hal ini, sebagai bibit tanaman yang digunakan adalah tanaman tomat. Mengingat tanaman tersebut membutuhkan kadar air yang cukup untuk dapat tumbuh dengan baik sesuai yang diharapkan.
Pokok permasalahan dari pembuatan alat ini adalah sebagai berikut:
1. Desain miniatur alat penyiram bibit tanaman secara otomatis dengan menggunakan tenaga surya.?
2. Efektifitas penyiraman secara otomatis dibanding dengan cara manual?.
3. Spesifikasi sensor-sensor?
4. Bagaimana pembuatan software ?
Adapun tujuan dari pembuatan alat ini adalah : 1. Dengan adanya alat penyiram bibit tanaman secara otomatis dengan menggunakan tenaga surya diharapkan dapat mempermudah proses irigasi pada masa pembibitan.
2. Dengan alat ini proses kegiatan irigasi dapat dilakukan dengan lebih baik, karena kebutuhan air pada tanaman dapat terpenuhi.
3. Dengan alat tersebut diharapkan dapat menghemat biaya karena tidak membutuhkan
tenaga listrik dari PLN untuk pengoperasiannya
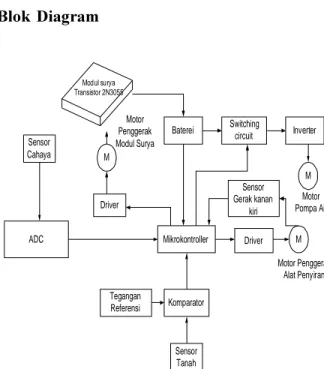
PERENCANAAN ALAT Blok Diagram
Gambar 2.1 : Blok Diagram Penyiram Bibit Tanaman secara Otomatis.
Prinsip Kerja Alat.
Pada rangkaian Alat Penyiram Otomatis Bertenaga Surya ini terdapat tiga sensor utama yaitu sensor pendeteksi ada tidaknya air dalam tanah, sensor pendeteksi posisi arah matahari dan sensor untuk mengatur gerakan lengan penyiram. Semua kerja dari rangkaian ini dikendalikan oleh sebuah mikrokontroller tipe ATMEL 89C52. Mikrokontroler bertugas untuk mengolah masukan data dari sensor dan mengolahnya kemudian dikeluarkan pada rangkaian driver-driver yang akan mengaktifkan hardware.
Mikrokontroller mempunyai dua fungsi utama yaitu untuk pembacaan keadaan tanah (kering atau basah) melalui sensor tanah dan yang kedua untuk
Mikrokontroller Switching circuit Komparator Inverter Driver Sensor Tanah Baterei Modul surya Transistor 2N3055 M M Motor Penggerak Alat Penyiran Motor Pompa Air Driver M Sensor Cahaya ADC Motor Penggerak Modul Surya Tegangan Referensi Sensor Gerak kanan kiri
pembacaan posisi sinar matahari melalui tiga sensor yaitu sensor untuk pembacaan matahari dari sebelah timur, tengah, dan sebelah barat. Kedua sensor tersebut (sensor tanah dan sensor cahaya) terus menerus dibaca oleh mikrokontroller sampai ditemukan perubahan dan dicocokkan dengan data yang telah dimasukkan dalam memori mikrokontroller, bila data tersebut cocok maka mikrokontroller akan memberi perintah untuk menggerakkan hardware.
Misalnya sensor tanah mendeteksi tanah dalam keadaan kering, maka mikrokontroller akan membaca perubahan tersebut selanjutnya mikrokontroller akan mengaktifkan rangkaian inverter untuk menyalakan pompa air melalui saklar elektronik, bersamaan itu pula mikrokontroller memerintahkan driver motor untuk menggerakkan motor dc. Selama proses ini terjadi mikrokontroller tetap membaca perubahan dari sensor tanah ( sudah basah atau belum). Bila tanah sudah cukup air, maka mikrokontroller akan memerintahkan pompa air untuk berhenti, tetapi untuk alat penyiram tetap menyala, alat penyiran ini akan berhenti apabila telah sampai pada posisi pertama kali start.
Perancangan Rangkaian Elektronik.
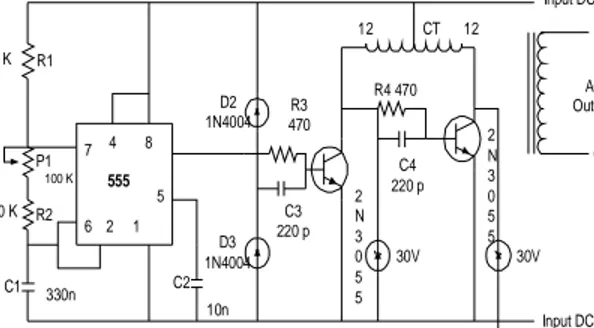
1. Rangkaian Pengubah Tegangan AC ke DC ( Inverter).
Pada pembuatan Proyek Akhir ini untuk memompa air dari tandon air ke alat penyiram digunakan pompa sekala kecil dengan tegangan 220 Volt, karena semua system pada Alat Peyiram Bibit Tanaman Otomatis ini disuplai dengan tegangan searah 12 Volt dari baterei, sedangkan untuk pompa air memerlukan tegangan bolak-balik maka diperlukan sebuah rangkaian Inverter untuk menyuplai tegangan AC ke motor pompa tersebut. Adapun rangkaian
Inverter tersebut dapat dilihat pada gambar dibawah ini :
Gambar 3.1 Rangkaian Inverter
Pada rangkaian inverter diatas untuk pembangkit frekuensi digunakan sebuah IC pewaktu 555 yang dirangkai sebagai multivibrator astabil. Keluaran multivibrator astabil ini diset pada frekuensi 50 Hz.
f =
1
,
7
.
1
R.
C
(3.1) f =
1
,
7
.
90
1
.
330
= 50 HzOutput 555 dibuat untuk mengemudikan basis T1 yang akan menswitch arus ke separuh primer trafo. T2 dikemudikan dari T1 dan dengan demikian akan menswitch arus ke separuh yang lain dari belitan primer trafo pada setengah putaran yang berlawanan dari gelombang pegemudinya. Dioda zener D4 dan D5 dipasang untuk melindungi T1 dan T2 dari loncatan (spike) tegangan tinggi yang dibangkitkan oleh trafo. Trafo yang dipakai adalah trafo jala-jala standart dengan sadap tengah (center- tap) yang dikemudikan secara terbalik ( sekunder menjadi primer dan primer menjadi sekunder ) Transistor 2N3055 hfe =70 Ic = 4 A Ib = hfeIc (3.2) 555 R1 47 K P1 R2 8 4 7 6 2 1 5 100 K 10 K C1 330n C2 10n D2 1N4004 D3 1N4004 C3 220 p R3 470 2 N 3 0 5 5 Input DC + 12 V 30V 30V 2 N 3 0 5 5 R4 470 C4 220 p 12 12 CT AC Out put 220 V 0 V Input DC - 12 V
Ib= 0,05mA 70 4 = IE = Ib + Ic (3.3) IE = 0,05 + 4 = 4,05 mA Rb =
226
05
,
0
7
,
0
12
=
−
=
−
Ib
Vce
Vin
WUntuk faktor keamanan maka Rb dipasang 470 W
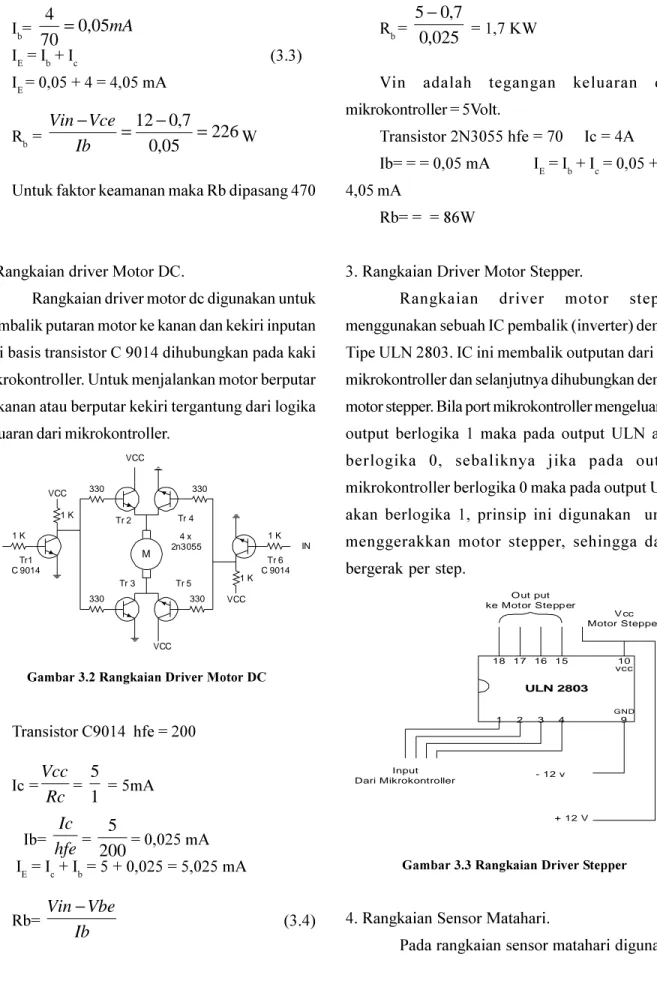
2. Rangkaian driver Motor DC.
Rangkaian driver motor dc digunakan untuk membalik putaran motor ke kanan dan kekiri inputan dari basis transistor C 9014 dihubungkan pada kaki mikrokontroller. Untuk menjalankan motor berputar ke kanan atau berputar kekiri tergantung dari logika keluaran dari mikrokontroller.
M 330 VCC 330 VCC 330 330 4 x 2n3055 1 K 1 K 1 K 1 K VCC VCC IN IN Tr 6 C 9014 Tr1 C 9014 Tr 2 Tr 3 Tr 4 Tr 5
Gambar 3.2 Rangkaian Driver Motor DC
Transistor C9014 hfe = 200 Ic = Rc Vcc = 1 5 = 5mA Ib=
hfe
Ic
= 200 5 = 0,025 mA IE = Ic + Ib = 5 + 0,025 = 5,025 mA Rb= Ib Vbe Vin− (3.4) Rb =5
0
−
,
025
0
,
7
= 1,7 KWVin adalah tegangan keluaran dari mikrokontroller = 5Volt.
Transistor 2N3055 hfe = 70 Ic = 4A Ib= = = 0,05 mA IE = Ib + Ic = 0,05 + 4 = 4,05 mA
Rb= = = 86W
3. Rangkaian Driver Motor Stepper.
Rangkaian driver motor stepper menggunakan sebuah IC pembalik (inverter) dengan Tipe ULN 2803. IC ini membalik outputan dari port mikrokontroller dan selanjutnya dihubungkan dengan motor stepper. Bila port mikrokontroller mengeluarkan output berlogika 1 maka pada output ULN akan berlogika 0, sebaliknya jika pada output mikrokontroller berlogika 0 maka pada output ULN akan berlogika 1, prinsip ini digunakan untuk menggerakkan motor stepper, sehingga dapat bergerak per step.
ULN 2803 1 2 3 4 9 10 18 17 16 15 vcc GND Out put ke Motor Stepper Input Dari Mikrokontroller + 12 V V cc Motor Stepper - 12 v
Gambar 3.3 Rangkaian Driver Stepper
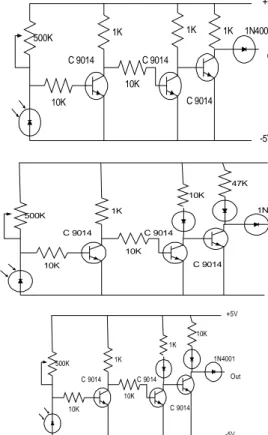
4. Rangkaian Sensor Matahari.
tiga buah photodioda untuk mendeteksi arah dari sinar matahari. Masing-masing sensor diatur sedemikian rupa sehingga masing-masing menghasilkan sudut penangkapan sinar sebesar 60°. Karena rangkaian ini menggunakan tiga buah photodioda, dan keluaran dari ketiga sensor ini harus berbeda antara sensor yang satu dengan yang lain, maka dibuat satu sensor satu rangkaian, jadi terdapat tiga rangkaian. Prinsip kerja dari ketiga rangkaian tersebut sebenarnya sama, hanya saja pada bagian transistor paling belakang, nilai dari resistor ditambah dan juga dipasang dioda, ini bertujuan agar didapat nilai output yang berbeda dari masing-masing sensor.
(a)
(b)
(c)
500K 1K 1K 1K 10K C 9014 C 9014 10K C 9014 1N4001 +5V -5V Out 500K 1K 1K 10K 10K C 9014 C 9014 10K C 9014 1N4001 +5V -5V Out 500K 1K 10K 47K 10K C 9014 C 9014 10K C 9014 1N4001 +5V -5V OutGambar 3.4 a) Rangkaian Sensor Cahaya Timur. b) Rangkaian Sensor Cahaya Barat. c) Rangkaian Sensor Cahaya Tengah
RTH = 1 2 2 1 R R xR R + = 500 1000 1000 500 + x = 333 KW VTH = 2 1 2 R R R + x Vcc (3.5) = 1000 500 1000 + x5 = 3,3 V ITH = RTH VTH = 333 3 , 3 = 0,009 mA 5. Rangkaian Sensor Tanah
Pada rangkaian sensor tanah, untuk sensor menggunakan dua buah probe karbon yang dipasang dengan jarak tertentu. Rangkaian sensor tanah ini terdiri dari rangkaian pembagi tegangan, rangkaian komparator dan flip-flop RS. Pada gambar dibawah Op-Amp1 tersambung dengan keluaran rangkaian pembagi tegangan pada terminal + selain itu keluaran rangkaian pembagi tegangan juga tersambung dengan terminal - Op-Amp2. Op-Amp pada rangkaian sensor ini berfungsi sebagai komparator (pembanding) tegangan yang masuk yaitu antara tegangan referensi dan tegangan keluaran dari rangkaian pembagi tegangan.
1K
741
741
P 50 K
P 50 K
Output Sensor Ke Port Mikrokontroller Vcc Vcc Vcc -+ -+ + + -Sensor Dari probe karbon
Gambar 3.6. Rangkaian Sensor Tanah
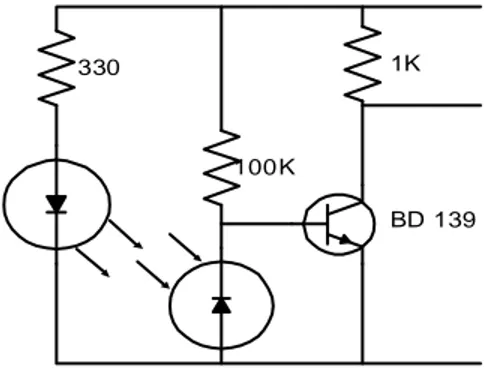
6. Rangkaian Sensor Gerak (kanan-kiri) Alat Penyiram.
Rangkaian ini terdiri dari optocoupler resistor dan transistor tipe NPN. Rangkian ini berfungsi untuk
mengatur gerak motor dc ke kanan dan ke kiri. Hasil keluaran dari sensor ini akan dikirim ke mikrokontroller kemudian diolah dan keluaran dari mikrikontroller akan dikirim ke driver motor dc untuk mengatur gerak ke kanan dan ke kiri.
330 100K 1K BD 139 Output + 5V - 5V
Gambar 3.7 Rangkian Sensor Gerak Lengan Penyiram
7. Rangkaian Pengubah Analog ke Digital (ADC 0804)
Rangkaian ini dapat mengubah masukan analog (0-5Volt) dari sensor matahari menjadi keluaran digital, yang selanjutnya dimasukkan pada masukan port mikrokontroller dan dikirim menuju driver motor setepper untuk menggerakan motor steper sesuai dengan inputan sensor cahaya.
Rangkaian ini bekerja dengan masukan 0 (L) dari mikrokontroller. Bila port keluaran dari mikrokontroller berlogika L (0) maka infra red akan menyala dan sinar tersebut akan ditangkap oleh photodioda, sehingga transistor pertama pada kaki basis tidak mendapat bias ( off ) oleh karena itu arus sumber dari kaki kolektor tidak bisa lewat ke emitor.
+ 5 V 0.1 uf 16 V 10 K 151 PF 6 7 8 1 9 4 1 2 1 0 1 8 1 7 1 6 1 5 1 4 1 3 1 2 1 1 3 5 8 Bit Keluaran ke mikrokontroller VDD V in(+) V in (-) ADC 0804 Inputan dari sensor surya
Gambar 3.8 Rangkaian ADC 0804
330 100K 10 K 12 V 5 V -Input dari port m ikrokontroller
Gambar 3.9 Rangkaian Saklar Elektronik
8. Pembuatan Modul Surya.
Pada pembuatan sel surya ini dilakukan dengan cara memasang transistor 2N3055 secara seri sampai di dapat tegangan 12 volt sedangkan untuk menghasilkan arus dipasang secara parallel. Untuk satu buah transistor 2N3055 bila terkena sinar matahari dapat menghasilkan tegangan sekitar kurang lebih 0,6 volt dan arus sekitar 0,006 Amp. Besarnya energi listrik yang di bangkitkan oleh modul surya ini bergantung : Jumlah dari elemen modul surya, Besar kecilnya intensitas cahaya sinar surya serta, Jenis transistor yang digunakan
+
-12 Volt
Gambar 3.10 Modul Surya
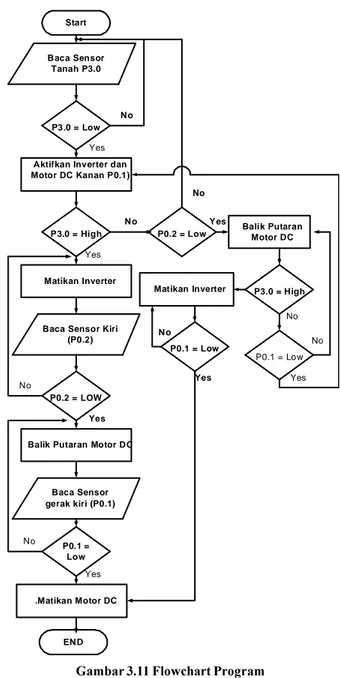
9. Pembuatan Software.
Adapun flowchart dari kedua program tersebut dapat dilihat pada gambar di bawah ini :
S t a r t B a c a S e n s o r C a h a y a , h a s i l k i r i m k e a k u m u l a t o r A = F 3 H A k t i f k a n s t e p e r , p u t a r k e k i r i 1 2 0 d r a j a t B a c a S e n s o r C a h a y a , h a s i l k i r i m k e a k u m u l a t o r A = D F H A k t i f k a n s t e p e r , p u t a r k e k a n a n 6 0 d r a j a t B a c a S e n s o r C a h a y a , h a s i l k i r i m k e a k u m u l a t o r A = D 7 H A k t i f k a n s t e p e r , p u t a r k e k a n a n 6 0 d r a j a t N o Y e s N o Y e s Y e s N o E N D Start Baca Sensor Tanah P3.0 P3.0 = Low Aktifkan Inverter dan Motor DC Kanan P0.1)
Baca Sensor Kiri (P0.2) P0.2 = LOW Baca Sensor gerak kiri (P0.1) P3.0 = High P0.1 = Low Balik Putaran Motor DC
.Matikan Motor DC Yes No Yes No Yes No Yes P0.2 = Low No No Balik Putaran Motor DC Yes P3.0 = High Matikan Inverter Matikan Inverter P0.1 = Low P0.1 = Low END No No No Yes Yes
Gambar 3.11 Flowchart Program
IV. HASIL PENGUKURAN 1. Sensor Tanah
Adapun data yang diperoleh dari pengukuran alat adalah sebagai barikut :
Kondisi tanah Tengan
Referensi
Tegangan Output Sensor
Batas Bawah 7,76 7,56
Batas Atas 8,38 8,58
Tabel 4.1 Tegangan Referensi dan keluaran Sensor Tanah
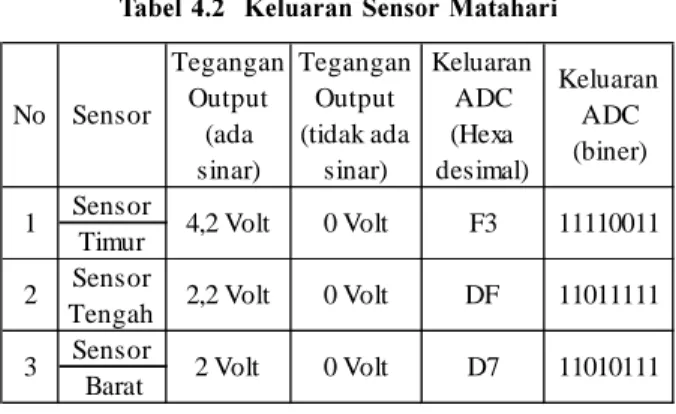
2. Sensor Cahaya Matahari.
Data yang diperoleh dari pengukuran adalah sebagai berikut:
Sensor Timur 2 Sensor
Tengah 2,2 Volt 0 Volt DF 11011111 Sensor Barat Tegangan Output (tidak ada sinar) Keluaran ADC (Hexa desimal) Keluaran ADC (biner) 0 Volt F3 11110011 11010111 No Sensor 1 4,2 Volt Tegangan Output (ada sinar) 3 2 Volt 0 Volt D7 Tabel 4.2 Keluaran Sensor Matahari
3. Sensor Gerak Lengan Penyiram.
Adapun data diperoleh adalah sebagai berikut :
No Tegangan Output 1 0 Volt 2 4,8 Volt Sensor Sensor Terhalang Sensor tidak terhalang
Tabel 4.3 Keluaran Sensor Lengan Penyiram
T/D = 5ms V/D = 2 V
Pada hasil pengukuran keluaran multivibrator dengan menggunakan oscilloscope di dapat data sebagai berikut :
Gambar 4.2 Keluaran Oscilator Inverter
Dari data diatas dapat dicari frekuensi keluaran pada multivibrator.
F =
T
1
dimana T = T/D x Lebar Pulsa. T = 5 x 4 = 20 ms F =
20 1000
= 50 Hz Karena pada inverter ini menggunakan multivibrator yang mengeluarkan gelombang persegi pada outputnya, maka pada inverter outputannya tidak berupa gelombang sinus, melainkan gelombang persegi dengan pemotongan yang agak landai.
T/D = 2 V/D = 4
Gambar 4.3 Keluaran Inverter Tanpa beban
Vrms = Tinggi Gel x V/D = 5 x 4 = 20 Pengali Probe (10) = 200 Volt.
Pada pengukuran dengan menggunakan multimeter diperoleh data sebagai berikut :
Tegangan Output Tanpa Beban 200 volt
Arus Output Tanpa Beban 69,7 mA Tabel 4.4 Keluaran Inverter Tanpa Beban
Daya yang diperoleh dari pengukuran inverter pada waktu tidak berbeban adalah :
P = V. I = 220 . 0,0697 = 13, 94 Watt
T/D = 2 V/D = 5
Vrms = Tinggi Gel x V/D = 2,8 x 5 = 14 Pengali Probe (10) = 140 Volt.
Pada pengukuran dengan menngunakan multimeter deperoleh data sebagai berikut :
Tegangan Output Tanpa Beban 145 volt
Arus Output Tanpa Beban 67,5 mA
Tabel 4.5 Keluaran Inverter Berbeban
Daya yang diperoleh dari pengukuran inverter pada waktu berbeban adalah : P = V . I = 145 . 0,0675 = 9, 78 Watt
Jadi daya yang diserap oleh motor pompa adalah:
P pompa = P tidak berbeban P berbeban = 13,94 9-7 = 4,7 Watt
SIMPULAN
Dari percobaan alat yang telah dilakukan, hasilnya dapat dituliskan beberapa kesimpulan sebagai berikut :
1. Mikrokontroller dapat membaca sensor tanah, maupun sensor cahaya dan memberi keluaran sesuai dengan yang di inginkan.
2. Rancangan kontrol otomatik pada alat penyiram tanaman yang telah dibuat, mampu mengontrol pompa irigari untuk menyuplai air pada saat dibutuhkan secara otomatis.
3. Jumlah sel dan intensitas cahaya sangat mempengaruhi tingkat pembangkitan energi yang
didapat.
4. Pembangkitan energi listrik yang paling optimal yaitu saat kondisi sinar matahari yang cerah yaitu antara jam 10.00 s/d 14.00.
5. Pada pembuatan modul surya hasilnya tidak bisa maksimal, ini dikarenakan semikonduktor pada keping transistor terdapat semacam bahan isolasi yang menghambat penyerapan sinar.
RUJUKAN
Anonim. 2001.Diktat Mesin-mesin elektrik. Jember. Barmawi, Malvino. 1985. Prinsip-prinsip Elektronika.
Jakarta : Erlangga.
Berahim, H. 1991. Pengantar Teknik Tenaga Listrik. Yogyakarta : Andi Ofset.
Himawan, www.himaone.net. 2002. Dasar-dasar Motor Stepper. Surabaya.
Leach, Malvino. 1992. Prinsip-prinsip dan Penerapan Digital. Jakarta : Erlangga.
Malvino, A. P. 1994. Aproksimasi Rangkaian Semikonduktor. Jakarta : Erlangga.
Malik, Ibnu, Muhammad. 1997. Bereksperimen Dengan Mikrokontroller 8031. Jakarta : P.T. Alex Media Komputindo.
Milman, Halkias. 1997. Elektronika Terpadu Jilid 1. Jakarta : Erlangga.
Paulus, A. N. 2003. Teknik Antar Muka dan Pemrograman Mikrokontroller AT89C5. Jakarta : P.T. Alex Media Komputindo.
Roger, Tokheim,L. 1995. Elektronika Digital. Jakarta : Erlangga..
Stehr, Wilhelm. 1987. Elektronika Untuk Pendidikan Taknik Jilid 2. Jakarta : PT. Paradnya Paramita. Silabani Pantur, Ph.D. 1981, Dasar-dasar Elektro Teknik.
Erlangga. Jakarta.
Wasito, S. 1985. Data Sheet Book. Jakarta : PT. Alex Media Komputindo.
Woollard. 1999. Elektronika Praktis. Jakarta : PT. Paradnya Paramita.