Skripsi
Diajukan Sebagai Salah Satu Syarat Memperoleh Gelar SARJANA TEKNIK
Jenjang Pendidikan Strata Satu (S1) TEKNIK MESIN
Disusun oleh:
Nama : Dhona Iwan Aryanto NIM : 0130311 - 021
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA
i
PERANCANGAN MESIN BOR RADIAL VERTIKAL
Diajukan Sebagai Salah Satu Syarat Dalam Meraih Gelar Sarjana Teknik (S1)
Pada Fakultas Teknologi Industri Jurusan Teknik Mesin
Universitas Mercu Buana
Disetujui untuk diuji,
Dosen Pembimbing
DR. Abdul Hamid, M.Eng.
.
v. Dalam tugas akhir ini penulis merancang mesin bor radial vertikal meliputi sistem transmisi daya, lengan, kolom, meja kerja dan landasan. Juga mekanisme penggerak lengan yang meliputi batang ulir / lead screw dan sistem roda gigi penggerak batang ulir. Sistem transmisi daya mesin bor radial vertikal ini menggunakan sistem transmisi roda gigi.
Perancangan dilakukan dengan metode ”Kesetaraan” yaitu dengan memodifikasi mesin bor yang ada.
Dari studi diatas dapat ditarik hasil-hasil sebagai berikut: 1. Daya potong teoritis sebesar 3,344 kW,
2. Daya potong actual sebesar 3,7 kW, dan
3. Delapan tingkat kecepatan putaran antara 50 rpm – 1200 rpm.
viii
HALAMAN PENGESAHAN i
HALAMAN PERSETUJUAN ii
HALAMAN PERNYATAAN iii
HALAMAN PERSEMBAHAN iv
ABSTRAK v
KATA PENGANTAR vi
DAFTAR ISI viii
DAFTAR GAMBAR x
DAFTAR TABEL xi
NOMEN KLATUR xii
BAB I PENDAHULUAN
1.1. Pengertian Umum 1
1.2. Cara Kerja Mesin Bor Radial Vertikal 2
1.3. Dasar Perancangan 2
1.4. Batasan Masalah 2
1.5. Sistematika Penulisan 3
BAB II LANDASAN TEORI
2.1. Transmisi Roda Gigi 4
2.2. Kecepatan Potong 4
2.3. Perhitungan Gaya Potong 5
2.4. Perhitungan Daya Motor Listrik Pada Mesin Bor Radial 7
BAB III SISTEM TRANSMISI
3.1. Merencanakan Range Rasio 9
3.2. Merencanakan Putaran Standar 9 3.3. Merencanakan Diagram Struktur Sistem Transmisi 11 3.4. Merencanakan Diagram Ray dan Speed Chart 12
ix 3.5.3. Analisa Gaya Roda Gigi 19
3.5.3.1. Gaya tangensial, gaya radial dan gaya axial 20 3.5.3.2. Beban dinamis, beban statis dan beban
terhadap keausan gigi 22
3.5.4. Ukuran Roda Gigi 27
3.6. Analisa Gaya –Gaya Tumpuan pada Speed Box 28
3.7. Perhitungan Momen Lengkung Maksimum pada Speed Box 43 3.8. Perencanaan Poros pada Speed Box 44
3.9. Pemilihan Bantalan 49
BAB IV PERENCANAAN STRUKTUR MESIN BOR RADIAL
4.1. Perencanaan Lengan 53
4.2. Perencanaan Meja Kerja 55
4.3. Perencanaan Kolom 56
4.4. Perencanaan Landasan 59
4.5. Perencanaan Batang Ulir 60
4.6. Perencanaan Penggerak Batang Ulir 66 4.6.1. Analisa gaya roda gigi 67
4.6.2. Ukuran roda gigi 71
4.6.3. Analisa gaya-gaya tumpuan 72 4.6.4. Analisa momen lengkung 73
4.6.5. Perencanaan poros 74 4.6.6. Pemilihan bantalan 76 BAB V KESIMPULAN 78 DAFTAR PUSTAKA LAMPIRAN GAMBAR
xi Tabel 3.1 Diameter Lingkaran Jarak Bagi (D) dan Jarak Poros (a) 18 Tabel 3.2 Gaya-Gaya pada Pasangan Roda Gigi 21 Tabel 3.3 Beban Dinamis pada Pasangan Roda Gigi 23 Tabel 3.4 Beban Statis pada Pasangan Roda Gigi 25 Tabel 3.5 Beban Ketahanan terhadap Keausan pada Roda Gigi 27 Tabel 3.6 Ukuran-ukuran pada Roda Gigi 28
Tabel 3.7 Gaya Reaksi Tumpuan 43
Tabel 3.8 Momen Lengkung 44
Tabel 3.9 Diameter Poros pada Speed Box 45
Tabel 3.10 Diameter Poros Defleksi Puntiran pada Speed Box 46 Tabel 3.11 Alur Pasak Poros pada Speed Box 47
Tabel 3.12 Kecepatan Kritis Poros pada Speed Box 49
Tabel 3.13 Beban Dinamik dan Nomor Bantalan pada Tumpuan 51 Tabel 3.14 Nomor, Tipe dan Ukuran Bantalan 52 Tabel 4.1 Diameter Lingkaran Jarak Bagi (D) dan Jarak Poros (a) 66 Tabel 4.2 Gaya-Gaya pada Pasangan Roda Gigi 68 Tabel 4.3 Beban Dinamis pada Pasangan Roda Gigi 69 Tabel 4.4 Beban Statis pada Pasangan Roda Gigi 70 Tabel 4.5 Beban Ketahanan terhadap Keausan pada Roda Gigi 71 Tabel 4.6 Ukuran-ukuran pada Roda Gigi 72
Tabel 4.7 Diameter Poros 75
Tabel 4.8 Diameter Poros Baru 76
Tabel 4.9 Beban Dinamik dan Nomor Bantalan pada Tumpuan 77 Tabel 4.10 Nomor, Tipe dan Ukuran Bantalan 77
x Gambar 2.1 Gaya Potong pada twist drill 5
Gambar 3.1 Diagram Struktur 12
Gambar 3.2 Diagram Ray 13
Gambar 3.3 Speed Chart 14
Gambar 3.4 Diagram Roda Gigi 15
Gambar 3.5 Konstruksi Tumpuan Roda Gigi 29
Gambar 3.6 Reaksi Tumpuan Poros I Akibat Gaya
Tangensial dan Radial. 29
Gambar 3.7 Proyeksi Gaya Tangensial dan Radial. 30 Gambar 3.8 Reaksi Tumpuan Poros II Akibat Gaya
Tangensial dan Radial 31
Gambar 3.9 Proyeksi Gaya Tangensial dan Radial. 31 Gambar 3.10 Reaksi Tumpuan Poros III Akibat Gaya Tangensial. 34 Gambar 3.11 Reaksi Tumpuan Poros III Akibat Gaya Radial. 35 Gambar 3.12 Reaksi Tumpuan Poros IV Akibat Gaya Tangensial. 37 Gambar 3.13 Reaksi Tumpuan Poros IV Akibat Gaya Radial. 38 Gambar 3.14 Reaksi Tumpuan Poros V Akibat Gaya
Tangensial dan Radial. 40
Gambar 3.15 Reaksi Tumpuan Poros Pembalik Putaran 42 Gambar 3.16 Proyeksi Gaya Tangensial dan Radial. 42 Gambar 4.1 Distribusi Gaya dan Ukuran Lengan 53
Gambar 4.2 Ukuran Meja Kerja 55
Gambar 4.3 Ukuran Kolom 57
Gambar 4.4 Distribusi Gaya dan Ukuran Landasan 59
Gambar 4.5 Diagram Roda Gigi 66
Gambar 4.6 Konstruksi Tumpuan Roda Gigi 72
xii - Am = Luas Penampang lead screw (cm2)
- b = Lebar Roda Gigi (mm)
- C = Beban dinamik (N)
- C1 = Faktor Koreksi Kecepatan Potong (m/min)
- C2 = Faktor Koreksi Jenis Pengerjaan
- D = Diameter Alat Potong (mm)
- dk = Diameter Lingkaran Kepala Roda Gigi (mm)
- df = Diameter Lingkaran Kaki Roda Gigi (mm)
- E = Modulus Elastisitas (N/cm2)
- fes = Tegangan Daya Tahan Permukaan (N/cm2)
- Fa = Gaya Aksial (N) - Fc = Gaya Potong (N) - Fcr = Beban Kritis (N) - Fd = Beban Dimanis (N) - Fe = Beban Ekivalen (N) - Fr = Gaya Radial (N) - Fs = Beban Statis (N) - Ft = Gaya Tangensial (N)
- Fw = Beban Keausan Gigi (N)
- G = Modulus Geser (N/mm2)
- h = Tebal Chip / Tatal (mm)
- I = Momen Inersia (mm4)
- k = Faktor Material Benda Kerja (diperoleh dari tabel)
- K = Load Stress Factor (N/cm2)
- Kc = Gaya Potong Spesifik (N/mm2)
- L = Panjang Lengan (mm)
- Lh = Umur pemakaian bantalan (jam)
xiii
- Nc = Putaran Kritis (rpm)
- P = Daya (kW)
- p = Circular Pitch (π . m)
- Pm = Daya pada Motor Penggerak (kW)
- Ps = Daya pada Spindel / Poros (kW)
- PE = Daya Effektif (kW)
- Pav = Tekanan permukaan rata – rata pada batang ulir (N/cm2)
- Q = Faktor Rasio untuk roda gigi luar - r = Range Rasio
- R = Resultan Gaya (N)
- S = Kecepatan Suap (mm/put)
- T = Torsi (N.m)
- V = Kecepatan Potong (m/menit)
- W = Berat Benda Kerja (N)
- Wkolom = Berat Kolom (N)
- Wmeja = Berat Meja (N)
- WG = Berat (Massa)Roda Gigi (kg)
- WS = Berat (Massa) Poros (kg)
- y = Faktor Bentuk Gigi (factor lewis) - Z = Jumlah Gigi Roda Gigi
- π = Phi (3,14)
- β = Sudut Kemiringan Roda Gigi (°)
- α = Sudut Tekan Roda Gigi (°)
- γ = Berat Jenis Baja (N/cm2)
- τ = Tegangan Geser (N/cm2)
- σb = Kekuatan Tarik (N/mm2)
- τijin = Tegangan Ijin (N/cm2)
- ∆p = Kekakuan Lead Screw (cm)
PENDAHULUAN
1.1. Pengertian Umum
Oleh karena kebutuhan akan proses produksi menjadi bertambah, dan juga akibat adanya persaingan, maka Industri dipaksa berusaha untuk memenuhi kebutuhan tersebut dengan sebaik-baiknya, dengan cara memproduksi barang lebih banyak, lebih baik kualitasnya dan harganya yang murah. Keinginan manusia untuk berproduksi lebih cepat, lebih baik dan lebih ekonomis, menjadi dasar untuk pengembangan mesin-mesin perkakas beserta peralatannya.
Mesin perkakas adalah mesin yang berfungsi untuk membentuk benda kerja sesuai dengan bentuk yang diminta dan mempunyai ukuran akurat, dengan cara penyayatan/pengirisan yang menghasilkan bentuk tatal.
Salah satu dari mesin perkakas adalah mesin bor. Mesin ini berfungsi untuk membuat lubang dan selanjutnya memproses lubang tersebut sesuai dengan keinginan misalnya: membuat lubang presisi, lubang bertingkat, lubang bersudut tertentu, dan ulir. Alat-alat yang sering digunakan di mesin bor adalah: mata bor,
reamer, counter bor, countersink, dan Tap.
Mesin bor dibuat dalam berbagai bentuk dan ukuran, ada yang berukuran kecil seperti mesin bor tangan. Ada juga mesin bor terpasang pada meja yang sering disebut mesin bor meja. Model yang lain adalah mesin bor yang terpasang di lantai, biasanya mesin bor ini berukuran besar.
Dilihat dari arah sumbu spindelnya, mesin bor dapat digolongkan menjadi 2 yaitu:
• Mesin bor vertikal • Mesin bor horizontal
Mesin bor radial termasuk mesin bor vertikal. Diantara mesin bor vertikal lainnya, hanya mesin bor radial yang sumbu spindelnya bisa digeser menjauhi maupun mendekati sumbu kolom. Selain mesin bor radial vertikal, ada pula mesin bor radial universal dimana sumbu spindelnya dapat diubah menjadi 2 arah yaitu
vertikal dan horizontal. Pada pembahasan kali ini, rancangan dititikberatkan pada mesin bor radial vertikal.
1.2. Cara Kerja Mesin Bor Radial Vertikal
Mesin bor ini digerakkan oleh motor penggerak berdaya 3,7 kW, terpasang sebagai pengatur penggerak transmisi kecepatan. Pengaturan kecepatan putar spindel diatur oleh roda gigi yang terpasang di dalam kotak roda gigi. Pemindahan kecepatan putar dengan cara memindahkan posisi tuas pengatur kecepatan putar. Posisi tuas dan kecepatan putar yang dihasilkan dapat dilihat pada tabel pengatur kecepatan. Tabel ini biasanya ditempel pada bodi mesin.
Pengaturan ketinggian dari pencekam pisau bor dengan cara memutar tuas dan konstruksi ini tidak dilengkapi dengan transmisi penggerak suap. Untuk pengaturan ketinggian lengan selain dengan memutar tuas juga dilengkapi dengan transmisi penggerak suap oleh motor penggerak berdaya 1,5 kW.
1.3. Dasar Perancangan
Tugas akhir ini berisi tentang perancangan mesin bor radial vertikal dimana dalam perancangan mesin ini berdasarkan pada peraturan yang umum diterapkan dalam desain dan pemilihan elemen mesin perkakas dan berdasarkan batasan teknis dari berbagai macam literatur.
1.4. Batasan Masalah
Dalam perancangan ini, perancang ingin memberikan batasan khusus tentang hal-hal yang akan dibahas. Hal ini disebabkan karena bagian dari mesin bor radial vertikal ini jumlahnya sangat banyak, sehingga perancang tidak akan membahas secara keseluruhan komponennya.
Berdasarkan uraian diatas, maka perancang membatasi perancangan yang dititikberatkan pada perancangan yang meliputi pembahasan sistem transmisi dan struktur dari mesin bor radial vertikal dengan mengikutsertakan perhitungan mengenai gaya-gaya yang bekerja didalamnya .
BAB I PENDAHULUAN
Dalam bab ini dibahas tentang pengertian umum mesin perkakas yang akan dirancang dan cara kerjanya, dasar perancangan dengan batasan masalah yang dibahas dalam perancangan. Pada bab ini dapat dilihat secara garis besar perancangan yang akan dibuat.
BAB II LANDASAN TEORI
Landasan teori dijabarkan dalam bab ini yang dapat digunakan sebagai dasar perhitungan pada perancangan. Landasan teori diuraikan dalam bentuk persamaan matematis.
BAB III PERENCANAAN SISTEM TRANSMISI
Pada bab ini memuat tentang perencanaan transmisi pengatur tingkat kecepatan putar dalam kotak roda gigi, mekanisme pemindahan roda gigi. Sistem transmisi digunakan untuk mengatur putaran dari motor ke spindle utama.
BAB IV PERECANAAN STRUKTUR MESIN BOR RADIAL VERTIKAL Isi dari bab ini meliputi lengan (arm), meja kerja, rangka/kolom (column), dan landasan. Juga dibahas mekanisme penggerak lengan yang meliputi batang ulir / lead screw dan sistem roda gigi penggerak batang ulir.
BAB V KESIMPULAN
Kesimpulan dari keseluruhan pembahasan dalam tugas akhir ini akan dibahas pada bab ini.
BAB II LANDASAN TEORI
Pada bab ini akan dijabarkan pembahasan yang dapat digunakan sebagai landasan dan tuntunan dalam penyelesaian permasalahan yang ada pada bab-bab berikutnya.
2.1. Transmisi Roda Gigi
Roda gigi mempunyai fungsi utama yaitu meneruskan daya dalam bentuk putaran. Putaran yang ditransmisikan besarannya tergantung dari jumlah gigi pada roda gigi yang berpasangan, ditentukan dengan rumus :
2 1 1 2 z z N N = ⋅ (rpm) (2.1) Dimana :
N1 = Putaran poros penggerak (rpm)
N2 = Putaran poros yang digerakkan (rpm)
Z1 = Jumlah gigi roda gigi penggerak
Z2 = Jumlah gigi roda gigi yang digerakkan
2.2. Kecepatan Potong
Kecepatan potong adalah panjang lintasan yang ditempuh selama satu menit oleh sisi potong yang terjauh dari sumbu center alat potong. Besaran kecepatan potong dipengaruhi oleh jenis material alat potong dan jenis material benda kerja. Biasanya kecepatan potong sudah distandarkan dimana nilai kecepatan potong didapat dari hasil percobaan.
Secara matematis, kecepatan potong dapat dirumuskan sebagai berikut :
1000
N D
V =π⋅ ⋅ (m/menit) (2.2)
Dimana : D = Diameter alat potong (mm) N = Putaran spindel (rpm)
Dalam perhitungan pada bab-bab berikutnya, rumus diatas digunakan sebagai dasar perhitungan dalam mencari besaran putaran pada spindel.
Rumus menjadi : D V N ⋅ ⋅ = π 1000 (rpm) (2.3) Dimana :
V = Kecepatan potong (m/menit) D = Diameter alat potong (mm)
2.3. Perhitungan Gaya Potong
Gaya potong merupakan gaya yang dibutuhkan oleh alat potong agar mampu melakukan proses pemotongan. Besaran gaya potong ini dipengaruhi oleh jenis material benda kerja, luas penampang potong dan kecepatan potong.
h
f/
2
Ø
Fc/2
θ
Gambar 2.1 Gaya Potong pada twist drill
Untuk menghitung gaya potong diasumsikan material benda kerja yang dikerjakan adalah baja konstruksi mesin St 50. Alat potong terbuat dari baja kecepatan tinggi mempunyai sudut θ = 118°, dengan kecepatan potong 20 m/min, dmax 50 mm, kecepatan suap (S) = 0,25 mm/put
Tebal tatal / chip pada proses tersebut adalah : h = S/2 . sin (θ/2)
= 0,25/2 . sin (118°/2) = 0,1 mm
Perhitungan gaya potong adalah sebagai berikut:
Fc = A⋅Kc (2.4)
( Heinzler, M., Tabellenbuch Metall, hal. 207) Dimana :
A = Luas penampang potong = 2 S D⋅ (mm2) = 2 25 , 0 50⋅ = 6,25 mm2
Kc = Gaya potong spesifik
= k . C1 . C2
k = Konstanta gaya potong spesifik, dipengaruhi oleh jenis material dan ketebalan tatal / chip (h). Diperoleh dari tabel. (lihat lampiran)
= 299,5 N / mm2
C1 = Faktor koreksi kecepatan potong
= 1,3 untuk kecepatan potong 10 s/d 30 m/min C2 = Faktor koreksi jenis pengerjaan
= 1,2 untuk jenis pengerjaan bor
Kc = 299,5 . 1,3 . 1,2 = 467,22 N / mm2
Diperoleh :
2.4. Perhitungan Daya Motor Listrik Pada Mesin Bor Radial
Untuk dapat melakukan penyayatan pada benda kerja, mesin bor memerlukan daya potong. Daya potong yang disediakan mesin harus sesuai dengan kebutuhan agar mesin bekerja dengan optimal. Daya potong tersebut sangat berguna untuk menentukan besar tenaga motor penggeraknya. Tenaga motor penggerak dapat dihitung menggunakan persamaan sebagai berikut:
η s m P P = (2.5)
(
)
100000 5 , 1 056 , 0 25 , 1 D2 K n S Ps= ⋅ ⋅ + ⋅ (2.6)( Machine Tool Design Handbook, hal. 640)
Dimana:
Pm = Daya pada motor penggerak (kW)
Ps = Daya pada spindel (kW)
η = Efisiensi sistem transmisi
diambil 80 %
D = Diameter bor (mm)
K = Faktor material benda kerja (Diperoleh dari tabel) n = Putaran spindel (rpm)
S = Kecepatan suap (mm/put)
Untuk menghitung daya motor diasumsikan material benda kerja yang dikerjakan adalah baja paduan (St 50) dengan tingkat kekerasan 163 BHN, kecepatan potong 20 m/min, dmax 50 mm kecepatan suap 0,25 mm/put. Mesin
menggunakan transmisi roda gigi. Sehingga diperoleh perhitungan sebagai berikut: d V n ⋅ ⋅ = π 1000 50 20 1000 ⋅ ⋅ = π 324 , 127 = n rpm
Didapatkan dari tabel : K = 1,56 Sehingga :
(
)
100000 5 , 1 056 , 0 25 , 1 D2 K n S Ps= ⋅ ⋅ + ⋅(
)
100000 25 , 0 5 , 1 056 , 0 324 , 127 56 , 1 50 25 , 1 ⋅ 2⋅ + ⋅ = ⋅ s P = 2,675 kW η s m P P = 8 , 0 675 , 2 = = 3,344 kW (Daya Teoritis)BAB III
PERENCANAAN SISTEM TRANSMISI
Sistem transmisi merupakan suatu bagian yang penting dari mesin perkakas. Transmisi suatu mesin perkakas berfungsi untuk meneruskan daya yang dihasilkan oleh motor penggerak utama ke spindel utama yang pada akhirnya merupakan pemutar alat potong. Untuk meneruskan daya tersebut bisa melalui sabuk, rantai, kopling maupun melalui serangkaian roda gigi.
3.1. Merencanakan Range Rasio
Range rasio merupakan parameter awal yang dibutuhkan untuk merancang
tingkatan kecepatan. Range rasio dapat dihitung dengan menggunakan angka putaran tertinggi dan angka putaran terendah dari putaran spindle utama. Pada perancangan disini, angka putaran spindle utama tertinggi adalah 1200 rpm dan terendah adalah 50 rpm. Sehingga dapat dihitung range rasio sebagai berikut:
min max
n
n
Rn
=
( Mehta, N. K., Machine Tool Design, hal. 58) (3.1) Dimana: Rn = range rasion = putaran spindle rpm rpm Rn 50 1200 = =24
3.2. Merencanakan Putaran Standar
Pada perencanaan putaran-putaran standar dari mesin bor radial vertikal ini digunakan sistem deret ukur atau sistem progresi geometri. Sistem ini biasa digunakan dalam merencanakan putaran standar pada perancangan mesin perkakas karena mempunyai banyak keuntungan, yaitu antara lain:
1. Kerugian kecepatan pada setiap tingkat adalah konstan. 2. Kerugian produktivitas pada setiap tingkat adalah konstan.
Dengan sistem progresi geometri dapat ditentukan putaran-putaran standar menggunakan persamaan sebagai berikut:
) 1 /( 1 1 − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = z z n n φ (3.2)
( Mehta, N. K., Machine Tool Design, hal. 59) Dimana:
φ = konstanta progresi geometri
n1 = putaran minimal spindel = 50 rpm
nz = putaran maksimal spindel = 1200 rpm
z = jumlah tingkat kecepatan = 8 Dari data diatas φ dapat dihitung yaitu sebesar:
) 1 8 /( 1 50 1200 − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = φ 5746 , 1 = φ
Setelah φ didapatkan, putaran-putaran standar dapat dicari dengan persamaan sebagai berikut: n1 = 50 rpm n2 = n1 x φ = 50 x 1,5746 = 79 rpm n3 = n1 x φ2 = 50 x 1, 5746 2 = 124 rpm n4 = n1 x φ3 = 50 x 1, 5746 3 = 195,2 rpm n5 = n1 x φ4 = 50 x 1, 5746 4 = 307,37 rpm n6 = n1 x φ5 = 50 x 1, 5746 5 = 484 rpm n7 = n1 x φ6 = 50 x 1, 5746 6 = 762,09 rpm n8 = n1 x φ7 = 50 x 1, 5746 7 = 1200 rpm
Setelah didapatkan putaran-putaran hasil perhitungan φ standar diatas, selanjutnya ditentukan putaran-putaran standar yang akan dipergunakan dalam membuat sistem transmisi pada perancancangan mesin bor radial vertikal, yaitu:
n1 = 50 rpm n4 = 200 rpm n7 = 800 rpm
n2 = 80 rpm n5 = 315 rpm n8 = 1200 rpm
n3 = 125 rpm n6 = 500 rpm
3.3. Merencanakan Diagram Struktur Sistem Transmisi
Diagram struktur berguna untuk memberikan informasi tentang banyaknya poros pada sistem transmisi, jumlah roda gigi pada masing-masing poros tersebut, dan akan diperoleh perbandingan angka transmisi.
Mesin bor radial vertikal ini menggunakan motor listrik dengan 1 tingkat kecepatan dan sistem transmisi dengan 8 tingkat kecepatan. Akan didistribusikan pada u buah tingkat kecepatan. Dari data ini dapat dicari kombinasi penyusunan tingkat kecepatan: ) ( )... ( ) ( ) ( 1 2 2 3 3 1 u u u p X p X p X p X z = (3.3)
( Mehta, N. K., Machine Tool Design, hal. 65) Dimana:
Zu = jumlah tingkat kecepatan pada u buah transmisi
Pu = angka tingkat kecepatan pada group transmisi u
Xu = karakteristik group transmisi u
X1 = 1
X2 = p1
X3 = p1.p2
Xu = p1.p2.p3…pu-1
Bila dalam perancangan disini ditentukan jumlah pendistribusian tingkat kecepatan = 3, tingkat kecepatan dapat ditulis menjadi:
8 2 2 2 3 2 1× × = × × = = p p p z Dari rumus zu= p1(X1)p2(X2)p3(X3)...pu(Xu)
Diperoleh salah satu kemungkinan penyusunan kombinasi dari pendistribusian tingkat kecepatan, dengan X1 = 1, X2 = 2, X3 = 2x2 = 4 sehingga:
) 4 ( 2 ) 2 ( 2 ) 1 ( 2 3= z
Analisa diagram struktur adalah sebagai berikut:
Antara poros I dan II =
min max i i
= φ(p1− X1) 1=φ(2−1)1=φ1
Antara poros I dan II =
min max i i
= φ(p2− X1) 2 =φ(2−1)2 =φ2 Antara poros I dan II =
min max i i
= φ(p3− X1) 3 =φ(2−1)4 =φ4
Perbandingan transmisi tertinggi adalah φXmax =φ4
Batasan dalam menentukan besarnya imax dan imin yaitu: imax ≤2 dan imin
≥
14imax = 2 = φ2 imin = 4 1 = 14 φ
Diagram strukturnya adalah sebagai berikut:
2 (1) 2 (2) 2 (4) Gambar 3.1 Diagram Struktur
3.4. Merencanakan Diagram Ray dan Speed Chart
Diagram struktur pada pembahasan diatas hanya menggambarkan perbandingan transmisi group tetapi tidak memberikan informasi yang jelas
tentang rasio masing-masing transmisi. Untuk mengetahui semua rasio pada transmisi dan angka kecepatan masing-maasing poros diperlukan speed chart.
Dalam merencanakan diagram Ray dan speed chart selalu berpedoman pada besarnya imax dan imin yang diijinkan. Berdasarkan diagram struktur yang telah
ditentukan diatas, maka dapat ditentukan diagram Ray sebagai berikut:
Gambar 3.2 Diagram Ray
Diagram Ray berguna untuk menentukan putaran standar terendah pada poros yang terakhir dari sistem transmisi. Berdasarkan diagram Ray dapat ditentukan speed chart yang menggambarkan putaran standar seluruhnya yang ada dalam sistem transmisi. Speed chart menggambarkan hubungan antara poros terakhir dengan poros motor listrik, hubungan ini dapat dilihat dari speed chart berikut ini: 1400 1200 800 500 315 200 125 80 50 I II III IV V Poros / Shaft Rpm
Gambar 3.3 Speed Chart
3.5. Merencanakan Roda Gigi untuk Speed Box
Speed box berfungsi sebagai pengubah kecepatan putar pada sebuah mesin. Didalamnya terdapat serangkaian roda gigi dimana masing-masing roda gigi memiliki ukuran dan bentuk yang berbeda-beda.
Mesin bor radial vertikal ini direncanakan memiliki 8 tingkat kecepatan sehingga diperlukan sebuah sistem transmisi yang menggunakan roda gigi untuk mengurangi ataupun meningkatkan putaran spindel utama sesuai tingkat yang dikehendaki.
3.5.1. Perencanaan Jumlah Gigi dari Roda Gigi
Setelah menggambar speed chart, jumlah gigi pada roda gigi dapat direncanakan. Hal yang perlu diperhatikan sebelum merencanakan jumlah gigi adalah jumlah minimum dari gigi-gigi pada roda gigi terkecil sebaiknya sesedikit mungkin, supaya perencanaan dimensi roda gigi lainnya yang lebih besar akan menghasilkan ukuran yang tidak besar sekali. Dengan demikian ukuran speed box
juga akan menjadi tidak terlalu besar.
1400 1200 800 500 315 200 125 80 50 I II III IV V Rpm Poros / Shaft
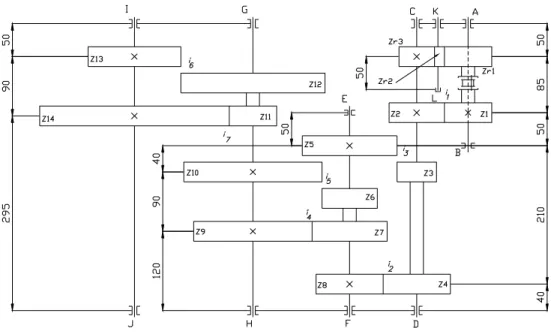
Diagram roda gigi pada speed box dapat digambarkan sebagai berikut:
Gambar 3.4 Diagram Roda Gigi
Dari diagram roda gigi dan speed chart dapat ditentukan besar rasio masing-masing roda gigi. Kemudian dari rasio tersebut akan digunakan untuk mencari jumlah gigi pada roda gigi.
Poros I ke poros II:
Dari speed chart terlihat bahwa poros II berputar dengan n = 1200 rpm, sehingga:
7 6 1400 1200 1= = = porosI porosII n n i
Poros II ke poros III:
Dari speed chart terlihat bahwa poros III berputar dengan n = 1200 rpm dan juga bisa berputar dengan n = 500 rpm, sehingga:
1 1200 1200 2= = = porosII porosIII n n i 12 5 1200 500 3= = = porosII porosIII n n i nout nin I V IV III II
Poros III ke poros IV:
Dari speed chart terlihat bahwa poros IV berputar dengan n = 800 atau 500 rpm dari putaran 1200 rpm. Selain itu juga dapat berputar n = 315 atau 200 rpm dari putaran 500 rpm. Kita tinjau pada n = 500 rpm menjadi n = 315 atau 200 rpm:
100 63 500 315 4= = = porosIII porosIV n n i 5 2 500 200 5= = = porosIII porosIV n n i Poros IV ke poros V:
Dari speed chart terlihat bahwa poros V berputar 8 tingkat putaran. Untuk mencari rasio kecepatan pada poros V, kita tinjau n = 200 rpm dari poros IV menjadi n = 50 rpm atau 315 rpm pada poros V:
40 63 200 315 6= = = porosIV porosV n n i 4 1 200 50 7= = = porosIII porosIV n n i
Dari rasio diatas dapat dicari jumlah gigi pada roda gigi:
7 6 1 2 1 = =i z z 1 2 8 4 = =i z z z4 = z8 12 5 3 5 3 = = i z z 100 63 4 9 7 = = i z z 5 2 5 10 6 = = i z z 40 63 6 13 12 = = i z z 4 1 7 14 11 = = i z z
Dengan ketentuan bahwa: z3 + z5 = z4 + z8 z7 + z9 = z6 + z10 z12 + z13 = z11 + z14 Diperoleh: z1 = 24 z2 = 28 z3 = 20 z4 = 34 z5 = 48 z6 = 28 z7 = 38 z8 = 34 z9 = 60 z10 = 70 z11 = 24 z12 = 73 z13 = 47 z14 = 96
Selain roda gigi dengan jumlah gigi seperti diatas, ada juga roda gigi tambahan yang berfungsi untuk membalik putaran spindel utama sekaligus mempercepat putaran saat spindel utama berputar balik. Putaran balik ini biasanya digunakan pada saat pembuatan ulir dengan menggunakan tap. Setelah proses penguliran, tap harus diputar balik supaya keluar dari lubang ulir. Pada proses ini tidak terjadi penyayatan. Oleh karena itu putaran balik dirancang lebih cepat agar spindel kembali ke posisi semula secepat mungkin sehingga waktu pemakaian semakin berkurang dan biaya mesin ikut berkurang.
Diasumsikan bahwa kecepatan putar balik adalah 1,5 kali putaran normal. Maka: 7 9 7 6 5 , 1 1400 1200 5 , 1 × = × = = r i
Dari rasio diatas dapat dicari jumlah gigi pada roda gigi pembalik:
7 9 3 1 = = r r r i z z
Untuk menghindari zr1 dan zr3 bertautan saat z1dan z2 berputar, maka dihitung:
zr1 + zr3 = 0,8 ( z1 + z2 )
zr1 + zr3 = 0,8 ( 24+ 28) ≈ 42
Diperoleh: zr1 = 24
zr3 = 18
Jumlah roda gigi zr2 dapat dipilih secara bebas, karena zr2 berfungsihanya sebagai
pembalik putaran saja. Jumlah roda gigi zr2 dipilih 18.
Dari data-data diatas diperoleh putaran baru yaitu:
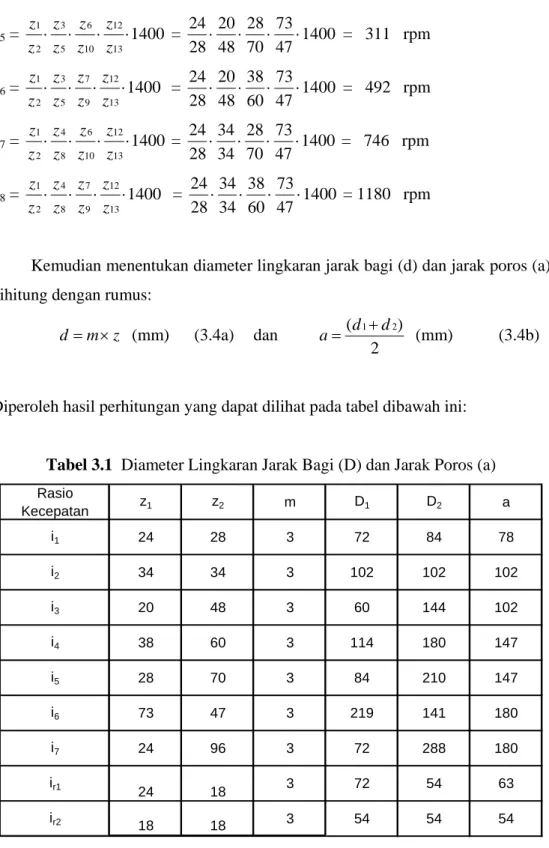
n1 = 1400 14 11 10 6 5 3 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 96 24 70 28 48 20 28 24⋅ ⋅ ⋅ ⋅ = 50 rpm n2 = 1400 14 11 9 7 5 3 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 96 24 60 38 48 20 28 24⋅ ⋅ ⋅ ⋅ = 79 rpm n3 = 1400 14 11 10 6 8 4 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 96 24 70 28 34 34 28 24⋅ ⋅ ⋅ ⋅ = 120 rpm n4 = 1400 14 11 9 7 8 4 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 96 24 60 38 34 34 28 24⋅ ⋅ ⋅ ⋅ = 190 rpm
n5 = 1400 13 12 10 6 5 3 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 47 73 70 28 48 20 28 24⋅ ⋅ ⋅ ⋅ = 311 rpm n6 = 1400 13 12 9 7 5 3 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 47 73 60 38 48 20 28 24⋅ ⋅ ⋅ ⋅ = 492 rpm n7 = 1400 13 12 10 6 8 4 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 47 73 70 28 34 34 28 24 ⋅ ⋅ ⋅ ⋅ = 746 rpm n8 = 1400 13 12 9 7 8 4 2 1 ⋅ ⋅ ⋅ ⋅ z z z z z z z z = 1400 47 73 60 38 34 34 28 24⋅ ⋅ ⋅ ⋅ = 1180 rpm
Kemudian menentukan diameter lingkaran jarak bagi (d) dan jarak poros (a) dihitung dengan rumus:
z m d = × (mm) (3.4a) dan 2 ) (d1 d2 a= + (mm) (3.4b)
Diperoleh hasil perhitungan yang dapat dilihat pada tabel dibawah ini:
Tabel 3.1 Diameter Lingkaran Jarak Bagi (D) dan Jarak Poros (a)
Rasio Kecepatan z1 z2 m D1 D2 a i1 24 28 3 72 84 78 i2 34 34 3 102 102 102 i3 20 48 3 60 144 102 i4 38 60 3 114 180 147 i5 28 70 3 84 210 147 i6 73 47 3 219 141 180 i7 24 96 3 72 288 180 ir1 24 18 3 72 54 63 ir2 18 18 3 54 54 54
3.5.2. Sistem Pengubah Tingkat Kecepatan
Pada suatu transmisi diperlukan metode untuk mengubah tingkat kecepatan putaran. Metode yang digunakan adalah metode roda gigi geser (sliding gear) yaitu metode yang menggunakan beberapa roda gigi yang posisinya dapat digeser untuk dipasangkan pada roda gigi yang mempunyai rasio kecepatan berlainan. Metode ini sering digunakan dalam perancangan mesin perkakas karena mempunyai banyak keuntungan, diantaranya:
• Dimensi radial yang relatif kecil.
• Mampu mentransmisikan daya dan torsi yang besar.
• Tingkat keausan roda gigi relatif kecil karena roda gigi yang tidak berpasangan pada suatu tingkat transmisi tertentu tidak bergesekan.
Metode ini juga memiliki kelemahan, antara lain: • Dimensi aksial yang relatif besar.
• Penggantian kecepatan putar hanya dilakukan pada saat spindel dalam keadaan berhenti.
• Memerlukan alat pengunci / interlocking supaya roda gigi geser berada posisi yang tepat dan tidak tejadi benturan tingkat kecepatan.
• Hanya roda gigi geser berbentuk lurus / spur gear yang cocok.
• Diperlukan gaya yang besar untuk memindahkan roda gigi geser, sehingga penggeseran secara manual tidak bisa digunakan pada mesin beban berat.
3.5.3. Analisa Gaya Roda Gigi
Perhitungan gaya-gaya pada roda gigi berdasarkan pada besar daya yang ditransmisikan dan kecepatan keliling pada roda gigi sehingga dapat ditentukan besar gaya tangensial, gaya radial dan gaya aksial yang terjadi pada pasangan roda gigi. Kemudian dilakukan perhitungan kekuatan pada roda gigi agar mampu menahan beban dinamis, beban statis dan beban terhadap keausan gigi. Contoh penerapan rumus dilakukan pada pasangan roda gigi I. Hasil perhitungan gaya-gaya pada pasangan roda gigi lainnya ditampilkan pada tabel.
3.5.3.1. Gaya tangensial, gaya radial dan gaya axial Kecepatan keliling: 1000 1 1 n d V =π ⋅ ⋅ 1000 1400 72⋅ ⋅ =π = 316,7 m/min Gaya tangensial: s t C V P F = ⋅4500⋅ (N) (3.5)
(Khurmi, R.S., A Text Book of Machine Design, hal. 1007) Dimana:
Cs = Faktor pemakaian/pelayanan
= 1,54 (beban kejut medium, 8 – 10 jam/hari) P = Daya; 1 kW = 1,341 hp
V = Kecepatan keliling (m/min) Sehingga: 54 , 1 316,7 4500 341 , 1 7 , 3 ⋅ × = ⎜⎝⎛ ⎟⎠⎞⋅ t F = 108,58 N Gaya radial: α tan ⋅ = t r F F (N) (3.6) Dimana:
α = sudut tekan roda gigi = 20° Sehingga:
Fr = 108,58 . tan 20° = 39,52 N
Gaya aksial:
Hanya terjadi pada roda gigi miring (helical gear) dengan helix angle β
β tan ⋅ = t a F F (N) (3.7) Dimana:
Sehingga:
Fa = 108,58 . tan 0° = 0 N
Untuk perhitungan gaya-gaya yang bekerja pada roda gigi lainnya, dilakukan dengan cara yang sama. Tetapi perhitungan kecepatan keliling pada poros lainnya menggunakan putaran paling rendah supaya menghasilkan perhitungan gaya-gaya yang paling besar. Diperoleh hasil perhitungan yang dapat dilihat pada tabel berikut ini:
Tabel 3.2 Gaya-Gaya pada Pasangan Roda Gigi
Rasio kecepatan Pasangan Roda gigi d (mm) P (kw) V (m/min) Ft (N) Fr (N) Fa (N) Z1 72 3.7 316.7 108.58 39.52 0.00 Z2 84 3.7 316.7 108.58 39.52 0.00 Z4 102 3.7 384.5 89.42 32.55 0.00 Z8 102 3.7 384.5 89.42 32.55 0.00 Z3 60 3.7 226.2 152.01 55.33 0.00 Z5 144 3.7 226.2 152.01 55.33 0.00 Z7 114 3.7 179.1 192.02 69.89 0.00 Z9 180 3.7 179.1 192.02 69.89 0.00 Z6 84 3.7 131.9 260.59 94.85 0.00 Z10 210 3.7 131.9 260.59 94.85 0.00 Z12 219 3.7 137.6 249.88 90.95 0.00 Z13 141 3.7 137.6 249.88 90.95 0.00 Z11 72 3.7 45.2 760.07 276.64 0.00 Z14 288 3.7 45.2 760.07 276.64 0.00 Zr 1 72 3.7 316.7 108.58 39.52 0.00 Zr 2 54 3.7 316.7 108.58 39.52 0.00 Zr 2 54 3.7 316.7 108.58 39.52 0.00 Zr 3 54 3.7 316.7 108.58 39.52 0.00 ir2 i5 i6 i7 ir1 i1 i2 i3 i4
3.5.3.2. Beban dinamis, beban statis dan beban terhadap keausan gigi
Roda gigi pada saat berputar tidak hanya menimbulkan gaya tangensial tetapi juga menimbulkan beban dinamis, dimana beban ini timbul akibat adanya kecepatan roda gigi yang besar kecilnya dipengaruhi oleh lebar roda gigi dan material roda gigi. Perhitungan beban dinamis digunakan untuk mengetahui kekuatan gigi. Selain itu juga diperhitungkan beban statis maupun beban terhadap keausan gigi. Hal ini untuk menghindari kerusakan pada roda gigi, misalnya: patahnya gigi, permukaan tergores. Dan juga mengurangi cepatnya keausan. Beban dinamis: ) ( 11 , 0 ) ( 11 , 0 t t t d F C b V F C b V F F + + ⋅ + + = ⋅ ⋅ ⋅ ⋅ (N) (3.8)
(Khurmi, R.S., A Text Book of Machine Design, hal 1009) Dimana :
Ft = Gaya tangensial (N) = V P 4500⋅
(menurut Khurmi, pada perhitungan beban dinamis faktor pemakaian Cs diabaikan)
V = Kecepatan keliling (m/min)
b = Lebar roda gigi (cm) ; diambil 10 x modul C = Deformasi / faktor dinamis (N/cm)
= 2 1 1 1 E E e K + ⋅ (3.9)
K = Faktor bentuk gigi
= 0,111 untuk 20° full depth involute
e = Kesalahan maksimum yang diijinkan pada roda gigi (cm) Dari tabel dan interpolasi didapatkan e = 0,058 mm = 0,0058 cm E1 = Modulus elastisitas material roda gigi kecil / pinion
= 2 x 106 N/cm2 untuk material baja
E2 = Modulus elastisitas material roda gigi besar / gear
Harga faktor deformasi: 6 6 10 2 1 10 2 1 058 0 , 0 111 , 0 ⋅ ⋅ + ⋅ = C = 647,49 N/cm Sehingga: ) 51 , 70 647,49 3 ( 316,7 11 , 0 ) 51 , 70 647,49 3 ( 316,7 11 , 0 51 , 70 + + ⋅ + + = ⋅ ⋅ ⋅ ⋅ d F = 950,31 N
Untuk beban dinamis yang bekerja pada roda gigi lainnya, diperoleh hasil perhitungan yang dapat dilihat pada tabel berikut ini:
Tabel 3.3 Beban Dinamis pada Pasangan Roda Gigi
Rasio kecepatan
Pasangan
Roda gigi V (m/min) Ft (kg) b (cm) e (mm) C (N/cm) Fd (N)
Z1 316.7 70.51 3 0.058 647.49 950.31 Z2 316.7 70.51 3 0.058 647.49 950.31 Z4 384.5 58.06 3 0.052 575.70 951.14 Z8 384.5 58.06 3 0.052 575.70 951.14 Z3 226.2 98.71 3 0.070 775.23 912.56 Z5 226.2 98.71 3 0.070 775.23 912.56 Z7 179.1 124.69 3 0.076 844.98 859.76 Z9 179.1 124.69 3 0.076 844.98 859.76 Z6 131.9 169.22 3 0.083 921.40 789.18 Z10 131.9 169.22 3 0.083 921.40 789.18 Z12 137.6 162.26 3 0.082 910.94 797.87 Z13 137.6 162.26 3 0.082 910.94 797.87 Z11 45.2 493.55 3 0.093 1026.75 768.18 Z14 45.2 493.55 3 0.093 1026.75 768.18 Zr 1 316.7 70.51 3 0.058 647.49 950.31 Zr 2 316.7 70.51 3 0.058 647.49 950.31 Zr 2 316.7 70.51 3 0.058 647.49 950.31 Zr 3 316.8 70.51 3 0.058 647.35 950.37 i1 i2 i3 i4 ir2 i5 i6 i7 ir1 Beban statis:
y p b f
Fs = e⋅ ⋅ ⋅ (N) (3.10)
(Khurmi, R.S., A Text Book of Machine Design, hal 1009) Dimana :
fe = Kekuatan tarik ijin (N/mm2)
b = Lebar roda gigi (mm) ;
diambil 10 x modul (Khurmi, R.S., A Text Book of Machine Design, hal 1009)
p = Circular pitch
= π . m (3.10a)
y = Faktor bentuk gigi (faktor lewis)
= z 912 , 0 154 ,
0 − (untuk 20° full depth involute system) (3.10b) Data-data yang digunakan untuk perhitungan roda gigi adalah sebagai berikut:
• Bahan roda gigi dari baja SNC22 dengan kekuatan tarik ijin = 100 N/mm2
dan kekerasan pada permukaannya = 600 HB
• Circular pitch: p = π . 3 = 9,425
• Harga faktor bentuk gigi adalah: 24 912 , 0 154 , 0 − = y = 0,116 Sehingga: 116Fs =100⋅30⋅9,425⋅0, = 3279,82 N
Kekuatan terhadap beban statis harus lebih besar dari kekuatan terhadap beban dinamis supaya tidak terjadi patahnya gigi dan juga untuk keamanan. Untuk memenuhi persyaratan ini, Buckhingham memberikan persamaan seperti di bawah ini: (Khurmi, R.S., A Text Book of Machine Design, hal 1006)
Fs ≥ 1,25 Fd untuk pembebanan teratur
Fs ≥ 1,35 Fd untuk pembebanan berubah-ubah
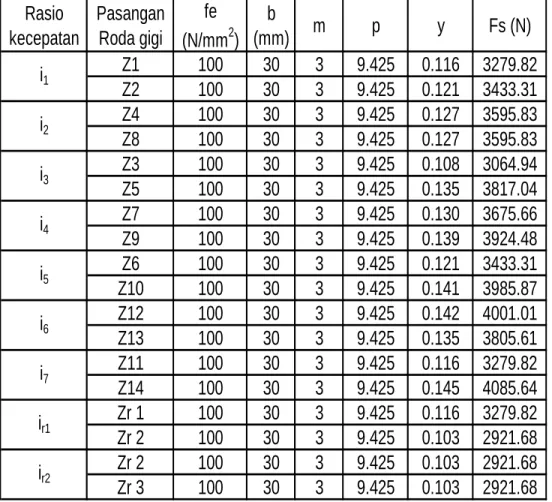
Mengacu pada persyaratan tersebut, selanjutnya besar beban statis pada masing-masing roda gigi dapat dilihat dalam tabel di bawah ini:
Tabel 3.4 Beban Statis pada Pasangan Roda Gigi
Rasio
kecepatan
Pasangan
Roda gigi
fe
(N/mm
2)
b
(mm)
m
p
y
Fs (N)
Z1
100
30
3
9.425
0.116
3279.82
Z2
100
30
3
9.425
0.121
3433.31
Z4
100
30
3
9.425
0.127
3595.83
Z8
100
30
3
9.425
0.127
3595.83
Z3
100
30
3
9.425
0.108
3064.94
Z5
100
30
3
9.425
0.135
3817.04
Z7
100
30
3
9.425
0.130
3675.66
Z9
100
30
3
9.425
0.139
3924.48
Z6
100
30
3
9.425
0.121
3433.31
Z10
100
30
3
9.425
0.141
3985.87
Z12
100
30
3
9.425
0.142
4001.01
Z13
100
30
3
9.425
0.135
3805.61
Z11
100
30
3
9.425
0.116
3279.82
Z14
100
30
3
9.425
0.145
4085.64
Zr 1
100
30
3
9.425
0.116
3279.82
Zr 2
100
30
3
9.425
0.103
2921.68
Zr 2
100
30
3
9.425
0.103
2921.68
Zr 3
100
30
3
9.425
0.103
2921.68
i
r2i
5i
6i
7i
r1i
1i
2i
3i
4Beban keausan gigi:
K Q b D
Fw = ⋅ ⋅ ⋅ (N) (3.11)
(Khurmi, R.S., A Text Book of Machine Design, hal 1009) Dimana :
D = Diameter jarak bagi (cm)
b = Lebar roda gigi (cm) ; diambil 10 x modul Q = Faktor rasio
=
(
)
2 1 2 2 z z z + ⋅(untuk roda gigi luar) (3.12)
z1 = Jumlah gigi roda gigi penggerak
z2 = Jumlah gigi roda gigi yang digerakkan
K = Load stress factor
= ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + 2 1 2 1 1 4 , 1 sin E E fes φ (3.13)
fes = Tegangan daya tahan permukaan (N/cm2)
= (28 x BHN) – 700
φ = Sudut tekan = 20° Faktor rasio pada kecepatan 1:
Q =
(
24 28)
28 2 + ⋅ = 1,0769Tegangan daya tahan permukaan fes = (28 x 600) – 700
= 16100 N/cm2
Load stress factor:
K = ⎥⎦ ⎤ ⎢⎣ ⎡ × + × ° 6 6 2 10 2 1 10 2 1 4 , 1 20 sin 16100 = 63,33 N/cm2 Sehingga: 33Fw =7,2⋅3⋅1,077⋅63, = 1473,04 N
Kekuatan terhadap beban keausan gigi harus lebih besar dari kekuatan terhadap beban dinamis.
Dengan cara yang sama diperoleh hasil perhitungan ketahanan roda gigi terhadap keausan dalam tabel berikut ini:
Tabel 3.5 Beban Ketahanan terhadap Keausan pada Roda Gigi Rasio kecepatan D (cm) b (cm) Q K (N/cm 2 ) Fw (N) i1 7.2 3 1.077 63.33 1473.038 i2 10.2 3 1 63.33 1937.746 i3 6 3 1.412 63.33 1609.201 i4 11.4 3 1.224 63.33 2651.897 i5 8.4 3 1.429 63.33 2279.701 i6 21.9 3 0.783 63.33 3259.023 i7 7.2 3 1.600 63.33 2188.513 ir1 7.2 3 0.857 63.33 1172.418 ir2 5.4 3 1 63.33 1025.865
3.5.4. Ukuran Roda Gigi
Roda gigi dibuat sedemikian rupa sehingga pada saat bersinggungan tidak menimbulkan suara berisik ataupun gesekan yang besar. Perhitungan ukuran pada roda gigi adalah sebagai berikut:
Kelonggaran kepala / puncak (Ck) :
Ukuran ini digunakan untuk menghindari sentuhan antara lingkaran kaki roda gigi penggerak dengan lingkaran kepala roda gigi tergerak. Besarnya kelonggaran kepala standar antara 0,1 s/d 0,3 kali modul. Adapun besarnya kelonggaran kepala yang diutamakan adalah 0,17 x modul; 0,25 x modul; 0,3 x modul. Untuk perencanaan kali ini digunakan Ck = 0,25 x modul.
Tinggi kepala gigi (hk) :
Tinggi kepala untuk roda gigi normal sama dengan besarnya modul. Tinggi kaki gigi (hf) :
Tinggi kaki untuk roda gigi besarnya sama dengan tinggi kepala gigi (hk)
ditambah dengan kelonggaran kepala (Ck). Atau dengan kata lain besarnya
Diameter lingkaran kepala (dk) : m z m h d dk = +2 k =( × )+2 (3.14)
Diameter lingkaran kaki (df) :
) 25 , 1 ( 2 ) ( 2h m z m d df = − f = × − ⋅ (3.15)
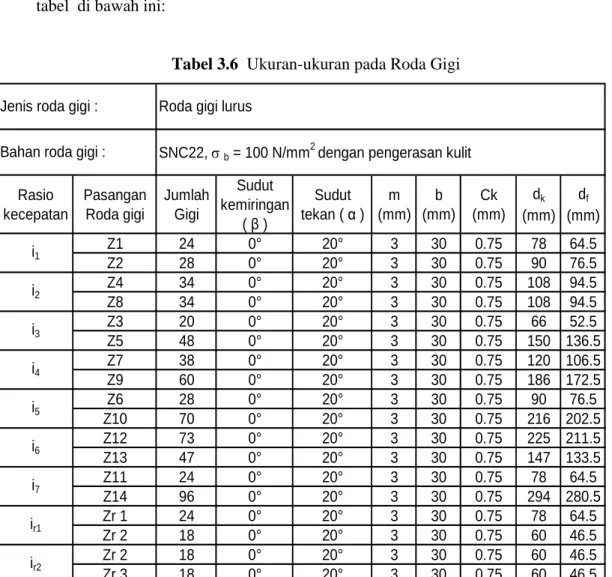
Selanjutnya ukuran-ukuran roda gigi tiap tingkat kecepatan dapat dilihat pada tabel di bawah ini:
Tabel 3.6 Ukuran-ukuran pada Roda Gigi
Rasio kecepatan Pasangan Roda gigi Jumlah Gigi Sudut kemiringan ( β ) Sudut tekan ( α ) m (mm) b (mm) Ck (mm) dk (mm) df (mm) Z1 24 0° 20° 3 30 0.75 78 64.5 Z2 28 0° 20° 3 30 0.75 90 76.5 Z4 34 0° 20° 3 30 0.75 108 94.5 Z8 34 0° 20° 3 30 0.75 108 94.5 Z3 20 0° 20° 3 30 0.75 66 52.5 Z5 48 0° 20° 3 30 0.75 150 136.5 Z7 38 0° 20° 3 30 0.75 120 106.5 Z9 60 0° 20° 3 30 0.75 186 172.5 Z6 28 0° 20° 3 30 0.75 90 76.5 Z10 70 0° 20° 3 30 0.75 216 202.5 Z12 73 0° 20° 3 30 0.75 225 211.5 Z13 47 0° 20° 3 30 0.75 147 133.5 Z11 24 0° 20° 3 30 0.75 78 64.5 Z14 96 0° 20° 3 30 0.75 294 280.5 Zr 1 24 0° 20° 3 30 0.75 78 64.5 Zr 2 18 0° 20° 3 30 0.75 60 46.5 Zr 2 18 0° 20° 3 30 0.75 60 46.5 Zr 3 18 0° 20° 3 30 0.75 60 46.5
Jenis roda gigi :
Bahan roda gigi :
i1
Roda gigi lurus
SNC22, σ b = 100 N/mm
2
dengan pengerasan kulit
i2 i3 i4 ir2 i5 i6 i7 ir1
3.6. Analisa Gaya –Gaya Tumpuan pada Speed Box
Gaya-gaya yang ditimbulkan oleh roda gigi yang berputar menyebabkan timbulnya gaya-gaya reaksi pada tumpuan. Gaya-gaya reaksi ini besarnya tergantung pada posisi roda gigi yang bekerja. Konstruksi roda gigi yang
menggunakan roda gigi geser inilah yang menyebabkan perubahan gaya reaksi pada tumpuan. Gambar konstruksi tumpuan dibawah ini digunakan untuk menganalisa gaya-gaya reaksi pada tumpuan :
Gambar 3.5 Konstruksi Tumpuan Roda Gigi
Perhitungan analisa gaya reaksi berikut dilakukan hanya pada gaya-gaya reaksi yang terbesar. Gaya-gaya-gaya reaksi terbesar terjadi pada gaya-gaya-gaya-gaya terbesar yang ditimbulkan oleh roda gigi, seperti pada tabel 3.2. Analisa dilakukan pada setiap poros.
Poros I :
Distribusi beban serta reaksi pada tumpuan dapat dilihat dalam diagram gaya pada bidang datar berikut ini :
Fr cos a Ft cos a
a F t c o s a a = 43,43° Zr2 Zr3 Zr1 Fr Fr cos a
Gambar 3.7 Proyeksi Gaya Tangensial dan Radial.
Reaksi akibat adanya gaya tangensial: Σ MA = 0 0 =
(
-FtcosaZr1×50) (
+ FtZ1×135) (
− RBt×185)
RBt = 185 135) (Ft 50) a cos (-Ft Zr1× + Z1× = 185 135) (108,58 50) (-78,85× + × = 57,92 N Σ MB = 0 RAt = 185 50) (Ft 135) a cos (Ft Zr1× − Z1× = 185 50) (108,58 135) (-78,85× + × = 28,19 NReaksi akibat adanya gaya radial : Σ MA = 0 RBr = 185 135) (Fr 50) a cos (Fr Zr1× + Z1× = 185 135) (39,52 50) (28,7× + × = 31,62 N Σ MB = 0 RAr = 185 50) (Fr 135) a cos (Fr Zr1× + Z1× = 185 50) (39,52 ) 35 1 (28,7× + × = 36,60 N
Resultan gaya reaksi tumpuan poros I : RA = 2 2 Ar At R R + = 28,192 +36,62 = 46,196 N RB = 2 2 Br Bt R R + = 2 2 62 , 31 92 , 57 + = 65,994 N
Poros II :
Ada 2 kemungkinan roda gigi yang bekerja yaitu roda gigi Z3 dan Z5 yang bekerja,
atau roda gigi Z4 dan Z8 yang bekerja. Selain itu ada 2 roda gigi tetap yang bekerja
yaitu Z1 dan Z2 jugaZr2 dan Zr3. Masing-masing menimbulkan gaya reaksi yang
besarnya tidak sama. Distribusi beban serta reaksi pada tumpuan dapat dilihat dalam diagram gaya pada bidang datar berikut ini :
Ft cos a Ft cos a Fr cos a Fr cos a Fr cos a F t c o s a a = 53,33° a Zr2 Zr1 Ft Zr3 Fr
Gambar 3.9 Proyeksi Gaya Tangensial dan Radial.
Reaksi akibat adanya gaya tangensial Ftz3 : Σ MC = 0 RDt = 435 ) 85 1 (Ft 135) (Ft 50) a cos (Ft Zr3× + Z2× + Z3× = 435 ) 85 1 (152,01 135) (108,58 50) (64,85× + × + × = 105,8 N Σ MD = 0 RCt = 435 ) 250 (Ft 300) (Ft ) 85 3 a cos (Ft Zr3× + Z2× + Z3× = 435 ) 250 (152,01 300) (108,58 ) 85 3 (64,85× + × + × = 219,64 N
Reaksi akibat adanya gaya radial Frz3 :
Σ MC = 0 RDr = 365 ) 85 1 (Fr 135) (Fr 50) a cos (Fr Zr3× + Z2× − Z3× = 435 ) 85 1 (55,33 135) (39,52 50) (23,6× + × − × = -8,55 N Σ MD = 0 RCr = 365 ) 250 (Fr 300) (Fr ) 85 3 a cos (Fr Zr3× + Z2× + Z3× = 435 ) 250 (55,33 300) (39,52 ) 85 3 (23,6× + × + × = 16,35 N
Reaksi akibat adanya gaya tangensial Ftz4 :
Σ MC = 0 RDt = 435 ) 395 (Ft 135) (Ft 50) a cos (Ft Zr3× + Z2× + Z4× = 435 ) 395 (89,42 135) (108,58 50) (64,85× + × + × = 122,35 N Σ MD = 0 RCt = 435 ) 40 (Ft 300) (Ft ) 85 3 a cos (Ft Zr3× + Z2× + Z4×
= 435 ) 40 (89,42 300) (108,58 ) 85 3 (64,85× + × + × = 140,5 N
Reaksi akibat adanya gaya radial Frz4 :
Σ MC = 0 RDr = 435 ) 395 (Fr 135) (Fr 50) a cos (Fr Zr3× + Z2× − Z4× = 435 ) 395 (32,55 135) (39,52 50) (23,6× + × − × = -14,58 N Σ MD = 0 RCr = 435 ) 40 (Fr 300) (Fr ) 85 3 a cos (Fr Zr3× + Z2× − Z4× = 435 ) 40 (32,55 300) (39,52 ) 85 3 (23,6× + × − × = 45,15 N
Resultan gaya reaksi tumpuan poros II akibat gaya Fzr3 , Fz2 dan Fz3 :
RC(zr3,z2&z3) = 2 2 Cr Ct R R + = 219,642 +16,352 = 220,25 N RD(zr3,z2&z3) = 2 2 Dr Dt R R + = 105,8,862 +8,552 = 106,15 N Resultan gaya reaksi tumpuan poros II akibat gaya Fzr3 , Fz2 dan Fz4 :
RC(zr3,z2&z4) = 2 2 Cr Ct R R + = 140,52+45,152 = 147,58 N RD(zr3,z2&z4) = 2 2 Dr Dt R R + = 122,352+14,582 = 123,21 N Poros III :
Ada 4 kemungkinan roda gigi yang bekerja yaitu roda gigi Z4 dan Z8 dengan Z7
dan Z9 atau Z4 dan Z8 dengan Z6 dan Z10 atau Z3 dan Z5 dengan Z7 dan Z9 atau Z3
dan Z5 dengan Z6 dan Z10 yang bekerja. Masing-masing menimbulkan gaya reaksi
yang besarnya tidak sama. Distribusi beban akibat gaya tangensial dan gaya radial yang ditampilkan secara terpisah dapat dilihat dalam diagram gaya pada bidang datar berikut ini :
Gambar 3.10 Reaksi Tumpuan Poros III Akibat Gaya Tangensial.
Reaksi akibat adanya gaya tangensial Ftz7 dan Ftz8 :
Σ ME = 0 RFt = 300 ) 260 (Ft ) 180 (FtZ7× + Z8× = 300 ) 260 (89,42 ) 180 (192,02× + × = 192,71 N Σ MF = 0 REt = 300 40) (Ft ) 20 1 (FtZ7× + Z8× = 300 40) (89,42 ) 20 1 (192,02× + × = 88,73 N
Reaksi akibat adanya gaya tangensial Ftz6 dan Ftz8 :
Σ ME = 0 RFt = 300 ) 260 (Ft ) 90 (FtZ6× + Z8× = 300 ) 260 (89,42 ) 90 (260,59× + × = 155,68 N Σ MF = 0 REt = 300 40) (Ft 10) 2 (FtZ6× + Z8× = 300 40) (89,42 10) 2 (260,59× + × = 194,34 N
Reaksi akibat adanya gaya tangensial Ftz5 dan Ftz7 :
Σ ME = 0 RFt = 300 ) 180 (Ft ) 50 (FtZ5× + Z7× = 300 ) 180 (192,02 ) 50 (152,01× + × = 140,55 N
Σ MF = 0 REt = 300 120) (Ft 250) (FtZ5× + Z7× = 300 120) (192,02 250) (152,01× + × = 203,48 N
Reaksi akibat adanya gaya tangensial Ftz5 dan Ftz6 :
Σ ME = 0 RFt = 300 ) 90 (Ft ) 50 (FtZ5× + Z6× = 300 ) 90 (260,59 ) 50 (152,01× + × = 103,51 N Σ MF = 0 REt = 300 10) 2 (Ft 250) (FtZ5× + Z6× = 300 10) 2 (260,59 250) (152,01× + × = 309,09 N
Gambar 3.11 Reaksi Tumpuan Poros III Akibat Gaya Radial.
Reaksi akibat adanya gaya radial Frz7 dan Frz8 :
Σ ME = 0 RFr = 300 ) 60 2 (Fr ) 180 (FrZ7× − Z8× = 300 ) 60 2 (32,55 ) 180 (69,89× − × = 13,73 N Σ MF = 0 REr = 300 40) (Fr 120) (FrZ7× − Z8× = 300 40) (32,55 120) (69,89× − × = 23,62 N
Reaksi akibat adanya gaya radial Frz6 dan Frz8 : Σ ME = 0 RFr = 300 ) 260 (Fr ) 90 (FrZ6× − Z8× = 300 ) 260 (32,55 ) 90 (94,85× − × = 0,25 N Σ MF = 0 REr = 300 40) (Fr ) 10 2 (FrZ6× − Z8× = 300 40) (32,55 ) 10 2 (94,85× − × = 62,05 N
Reaksi akibat adanya gaya radial Frz5 dan Frz7 :
Σ ME = 0 RFr = 300 ) 180 (Fr ) 50 (-FrZ5× + Z7× = 300 ) 180 (69,89 ) 50 (-55,33× + × = 32,71 N Σ MF = 0 REr = 300 120) (Fr ) 50 2 (FrZ5× − Z7× = 300 120) (69,89 ) 50 2 (55,33× − × = 18,15 N
Reaksi akibat adanya gaya radial Frz5 dan Frz6 :
Σ ME = 0 RFr = 300 ) 90 (Fr ) 50 (FrZ5× + Z6× = 300 ) 90 (94,85 ) 50 (55,33× + × = 19,23 N Σ MF = 0 REr = 300 0) 1 2 (Fr 250) (FrZ5× + Z6× = 300 0) 1 2 (94,85 250) (55,33× + × = 20,29 N
Resultan gaya reaksi tumpuan poros III akibat gaya Fz7 dan Fz8 :
RE(z7&z8) = 2 2 Er Et R R + = 88,732+23,622 = 91,82 N RF(z7&z8) = 2 2 Fr Ft R R + = 192,712+13,732 = 193,2 N
Resultan gaya reaksi tumpuan poros III akibat gaya Fz6 dan Fz8 :
RE(z6&z8) = 2 2 Er Et R R + = 194,342+62,052 = 204,01 N RF(z6&z8) = 2 2 Fr Ft R R + = 155,682+0,252 = 155,68 N Resultan gaya reaksi tumpuan poros III akibat gaya Fz5 dan Fz7 :
RE(z5&z7) = 2 2 Er Et R R + = 203,482+18,152 = 204,29 N
RF(z5&z7) = 2 2 Fr Ft R R + = 140,552+32,712 = 144,3 N
Resultan gaya reaksi tumpuan poros III akibat gaya Fz5 dan Fz6 :
RE(z5&z6) = 2 2 Er Et R R + = 309,092+20,292 = 309,76 N RF(z5&z6) = 2 2 Fr Ft R R + = 103,512+19,232 = 105,29 N Poros IV :
Seperti terlihat pada gambar 3.5 bahwa ada 4 kemungkinan roda gigi yang bekerja yaitu roda gigi Z7 dan Z9 dengan Z11 dan Z14 atau Z7 dan Z9 dengan Z12 dan Z13
atau Z6 dan Z10 dengan Z11 dan Z14 atau Z6 dan Z10 dengan Z12 dan Z13 yang
bekerja. Masing-masing menimbulkan gaya reaksi yang besarnya tidak sama. Distribusi beban akibat gaya tangensial dan gaya radial yang ditampilkan secara terpisah dapat dilihat dalam diagram gaya pada bidang datar berikut ini :
Reaksi akibat adanya gaya tangensial Ftz9 dan Ftz11 :
Σ MG = 0 RHt = 435 315) (Ft ) 40 1 (FtZ11× + Z9× = 435 315) (192,02 ) 40 1 (760,07× + × = 383,67 N Σ MH = 0 RGt = 435 ) 0 12 (Ft ) 95 2 (FtZ11× + Z9× = 435 ) 0 12 (192,02 ) 95 2 (760,07× + × = 568,42 N
Reaksi akibat adanya gaya tangensial Ftz9 dan Ftz12 : Σ MG = 0 RHt = 435 315) (Ft ) 0 5 (FtZ12× + Z9× = 435 315) (192,02 ) 0 5 (249,88× + × = 167,77 N Σ MH = 0 RGt = 435 ) 0 12 (Ft ) 385 (FtZ12× + Z9× = 435 ) 0 12 (192,02 ) 385 (249,88× + × = 274,13 N
Reaksi akibat adanya gaya tangensial Ftz10 dan Ftz11 :
Σ MG = 0 RHt = 435 225) (Ft 140) (FtZ11× + Z10× = 435 225) (260,59 140) (760,07× + × = 379,41 N Σ MH = 0 RGt = 435 ) 10 2 (Ft ) 295 (FtZ11× + Z10× = 435 ) 10 2 (260,59 ) 295 (760,07× + × = 641,25 N
Reaksi akibat adanya gaya tangensial Ftz10 dan Ftz12 :
Σ MG = 0 RHt = 435 225) (Ft 50) (FtZ12× + Z10× = 435 225) (260,59 50) (249,88× + × = 163,51 N Σ MH = 0 RGt = 435 ) 10 2 (Ft ) 385 (FtZ12× + Z10× = 435 ) 10 2 (260,59 ) 385 (249,88× + × = 346,97 N
Reaksi akibat adanya gaya radial Frz9 dan Frz11 : Σ MG = 0 RHr = 435 315) (Fr 140) (FrZ11× − Z9× = 435 315) (69,89 140) (276,64× − × = 38,42 N Σ MH = 0 RGr = 435 ) 0 12 (Fr ) 95 2 (FrZ11× − Z9× = 435 ) 0 12 (69,89 ) 95 2 (276,64× − × = 168,33 N
Reaksi akibat adanya gaya radial Frz9 dan Frz12 :
Σ MG = 0 RHr = 435 315) (Fr ) 0 5 (-FrZ12× + Z9× = 435 315) (69,89 ) 0 5 (-90,95× + × = 40,15 N Σ MH = 0 RGr = 435 ) 0 12 (Fr ) 385 (FrZ12× − Z9× = 435 ) 0 12 (69,89 ) 385 (90,95× − × = 61,22 N
Reaksi akibat adanya gaya radial Frz10 dan Frz11 :
Σ MG = 0 RHr = 435 225) (Fr 140) (FrZ11× − Z10× = 435 225) (94,85 140) (276,64× − × = 39,97 N Σ MH = 0 RGr = 435 ) 0 21 (Fr ) 95 2 (FrZ11× − Z10× = 435 ) 0 21 (94,85 ) 95 2 (276,64× − × = 141,82 N
Reaksi akibat adanya gaya radial Frz10 dan Frz12 :
Σ MG = 0 RHr = 435 225) (Fr 50) (-FrZ12× + Z10× = 435 225) (94,85 50) (-90,95× + × = 38,61 N Σ MH = 0 RGr = 435 ) 0 21 (Fr ) 385 (FrZ12× − Z10× = 435 ) 0 21 (94,85 ) 385 (90,95× − × = 34,71 N
Resultan gaya reaksi tumpuan poros IV akibat gaya Fz9 dan Fz11 :
RG(z9&z11) = 2 2 Gr Gt R R + = 568,422 +168,332 = 592,82 N
RH(z9&z11) = 2 2 Hr Ht R R + = 383,672 +38,432 = 385,59 N
Resultan gaya reaksi tumpuan poros IV akibat gaya Fz9 dan Fz12 :
RG(z9&z12) = 2 2 Gr Gt R R + = 274,132+61,222 = 280,88 N RH(z9&z12) = 2 2 Hr Ht R R + = 167,772+40,152 = 172,51 N Resultan gaya reaksi tumpuan poros IV akibat gaya Fz10 dan Fz11 :
RG(z10&z11) = 2 2 Gr Gt R R + = 641,252+141,822 = 656,75 N RH(z10&z11) = 2 2 Hr Ht R R + = 379,412 +39,972 = 381,51 N Resultan gaya reaksi tumpuan poros IV akibat gaya Fz10 dan Fz12 :
RG(z10&z12) = 2 2 Gr Gt R R + = 346,972+34,712 = 348,7 N RH(z10&z12) = 2 2 Hr Ht R R + = 163,512+38,612 = 168 N Poros V :
Ada 2 kemungkinan roda gigi yang bekerja yaitu roda gigi Z12 dan Z13 yang
bekerja, atau roda gigi Z11 dan Z14 yang bekerja. Masing-masing menimbulkan
gaya reaksi yang besarnya tidak sama. Distribusi beban serta reaksi pada tumpuan dapat dilihat dalam diagram gaya pada bidang datar di bawah ini :
Z12 dan Z13 yang bekerja Z11 dan Z14 yang bekerja
Reaksi akibat adanya gaya tangensial Ftz13 : Σ MI = 0 RJt = 435 50 FtZ13× = 435 50 88 , 49 2 × = 28,72 N Σ MJ = 0 RIt = 435 385 FtZ13× = 435 385 88 , 49 2 × = 221,16 N
Reaksi akibat adanya gaya radial Frz13 :
Σ MI = 0 RJr = 435 50 FrZ13× = 435 50 95 , 0 9 × = 10,45 N Σ MJ = 0 RIr = 435 385 FrZ13× = 435 385 95 , 0 9 × = 80,5 N
Reaksi akibat adanya gaya tangensial Ftz14 :
Σ MI = 0 RJt = 435 140 FtZ14× = 435 140 07 , 60 7 × = 244,62 N Σ MJ = 0 RIt = 435 295 FtZ14× = 435 295 07 , 60 7 × = 515,45 N
Reaksi akibat adanya gaya radial Frz14 :
Σ MI = 0 RJr = 435 140 FrZ14× = 435 140 64 , 76 2 × = 89,03 N Σ MJ = 0 RIr = 435 295 FrZ14× = 435 295 64 , 76 2 × = 187,61 N
Resultan gaya reaksi tumpuan poros V akibat gaya Fz13 :
RI(z13) = 2 2 Ir It R R + = 221,162+80,52 = 235,36 N
RJ(z13) = 2 2 Jr Jt R R + = 28,722 +10,452 = 30,57 N
Resultan gaya reaksi tumpuan poros V akibat gaya Fz14 :
RI(z14) = 2 2 Ir It R R + = 515,452+187,612 = 548,53 N RJ(z14) = 2 2 Jr Jt R R + = 244,622 +89,032 = 260,32 N
Poros pembalik putaran :
Distribusi beban serta reaksi pada tumpuan dapat dilihat dalam diagram gaya pada bidang datar berikut ini :
Gambar 3.15 Reaksi Tumpuan Poros Pembalik Putaran
Zr1 Zr3 Zr2 Fr Ft cos a Fr Ft Ft Fr co s a
a
Gambar 3.16 Proyeksi Gaya Tangensial dan Radial.
Dari gambar proyeksi ini terlihat bahwa ada 2 pasangan komponen gaya yang berpengaruh yaitu (Ft2.3 – Fr2.1cos a) dan (Fr2.3 + Ft2.1cos a) sehingga :
Reaksi akibat adanya gaya (Ft2.3 – Fr2.1cos a) :
RK1 = RL1 = 2 ) cos (Ft2.3−Fr2.1 a = 2 ) cos 52 , 39 58 , 108 ( − a = 34,67 N
a
= 6,76°Reaksi akibat adanya gaya (Fr2.3 + Ft2.1cos a) : RK2 = RL2 = 2 ) cos (Fr2.3+Ft2.1 a = 2 ) cos 58 , 108 52 , 39 ( + a = 73,67 N
Resultan gaya reaksi tumpuan poros pembalik putaran : RK = RL = 34,672+73,672 = 81,42 N
Tabel 3.7 Gaya Reaksi Tumpuan
1 2 3 4 Maksimum A 46.20 - - - 46.20 B 65.99 - - - 65.99 C 220.25 147.58 - - 220.25 D 106.15 123.21 - - 123.21 E 91.82 204.01 204.29 309.76 309.76 F 193.20 155.68 144.30 105.29 193.20 G 592.82 280.88 656.75 348.70 656.75 H 385.58 172.51 381.51 168.01 385.58 I 235.36 548.53 - - 548.53 J 30.57 260.32 - - 260.32 K 81.42 - - - 81.42 L 81.42 - - - 81.42 Poros Tumpuan
Resultan Reaksi Tumpuan ( N )
I Pembalik II III IV V
3.7. Perhitungan Momen Lengkung Maksimum pada Speed Box
Perhitungan pada momen lengkung diperoleh dari perkalian gaya reaksi dengan jarak. Perhitungan momen lengkung maksimum ini akan digunakan untuk perhitungan poros pada pembahasan berikutnya. Sebagai contoh perhitungan poros I momen lengkung maksimum terletak pada posisi roda gigi Z1 yang
besarnya 3299,71 N.mm.
Pada poros I besar momen lengkung akibat gaya-gaya dapat ditentukan sebagai berikut :
MA = 0
MzR1 = RA x 50 = 81,33 x 50 = 2309,82 N.mm
Mz1 = RB x 50 = 113,45 x 50 = 3299,71 N.mm
Hasil perhitungan momen lengkung pada poros yang lain dengan beberapa kemungkinan posisi roda gigi ditampilkan dalam tabel berikut ini :
Tabel 3.8 Momen Lengkung
1 2 3 4 Maksimum 2309.82 - - - 2309.82 3299.71 - - - 3299.71 11012.40 7378.80 - - 11012.40 21017.65 11206.94 - - 21017.65 26536.40 4928.54 - - 26536.40 16527.29 18360.49 10214.62 15487.93 18360.49 7727.81 6227.01 17316.26 22109.93 22109.93 82994.43 14044.23 91944.47 17434.90 91944.47 46270.19 20700.90 80116.90 35281.69 80116.90 11767.80 76793.83 - - 76793.83 11767.80 76793.83 - - 76793.83 2442.66 - - - 2442.66 2442.66 - - - 2442.66 III IV V Pembalik
Poros Momen Lengkung ( N.mm )
I
II
3.8. Perencanaan Poros pada Speed Box
Pada poros transmisi yang meneruskan daya melalui roda gigi, poros tersebut selain mendapat momen lengkung juga mendapat momen puntir (torsi). Besar torsi pada poros I adalah:
N P T ⋅ ⋅ ⋅ = π 2 4500 (N.m) (3.16) Dimana : P = Daya (kW); dimana 1 kW = 1,341 hp N = Kecepatan putaran (rpm) Sehingga: T = 1400 2 ) 341 , 1 7 , 3 ( 4500 ⋅ ⋅ × ⋅ π = 2,5383 N.m = 253,83 N.cm
Besar momen lengkung pada poros I diambil momen lengkung maksimum yaitu 3299,71 N.mm = 329,97 N.cm. Material ditentukan SNCM25 dengan kekuatan tarik 120 N/mm2 , sehingga diameter poros dapat dihitung :
ds = 3 / 1 2 2 ) ( ) ( 16 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ + ⋅ ⋅ Km M Kt T s τ π (mm) (3.17)
(Khurmi, R.S., A Text Book of Machine Design, hal 447) Dimana :
Km = Faktor koreksi untuk momen lengkung, diambil 1,5
Kt = Faktor koreksi untuk momen punter, diambil 1,5
τs = σb / (Sf1 . Sf2)
Sf1 = Faktor keamanan terhadap kelelahan puntir.
Untuk material SNCM25, Sf1 = 6
Sf2 = Faktor keamanan terhadap konsentrasi tegangan, dipilih 2
= 120 / (6 . 2 ) = 10 N /mm2 = 1000 N / cm2 Didapatkan : ds = 3 / 1 2 2 ) 83 , 253 5 , 1 ( ) 97 , 329 5 , 1 ( 1000 16 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ + ⋅ ⋅ π = 1,471 cm = 14,7 mm
Untuk perhitungan diameter poros lainnya, dilakukan dengan cara yang sama tetapi putaran poros yang digunakan adalah putaran poros terendah. Hasil dari perhitungan dapat dilihat pada tabel berikut ini :
Tabel 3.9 Diameter Poros pada Speed Box
Poros P (kW) N (rpm) M (N.cm) T (N.cm) Diameter poros (mm) I 3.7 1400 329.97 253.83 14.71 II 3.7 1200 2653.64 296.13 27.32 III 3.7 500 2210.99 710.71 26.08 IV 3.7 200 9194.45 1776.78 41.51 V 3.7 50 7679.38 7107.11 43.08 Pembalik 3.7 1866.67 244.27 190.37 13.32
Defleksi puntiran (θ) suatu poros dibatasi sampai dengan 0,25° untuk setiap meter panjang poros. Pemeriksaan θ pada poros menggunakan rumus :
4 584 s d G T dL d ⋅ = θ ≤ 0,25 °/meter Dimana : T = Momen puntir (N.mm)
G = Modulus geser, untuk baja = 8,3 x 103 N / mm2
Sehingga diameter poros agar defleksi puntiran tidak melebihi 0,25° adalah :
4
1 ,
4 T
ds = ⋅ (mm) (3.18)
(Sularso, Dasar Perencanaan dan Pemilihan Eleman Mesin, hal. 18)
Pada poros I didapatkan diameter poros baru sebesar :
4 2538,3 1 , 4 ⋅ = s d = 29,1 mm
Dengan memperhitungkan defleksi puntiran, diameter poros yang lainnya dihitung dengan cara yang sama. Hasil perhitungan dapat dilihat pada tabel berikut ini :
Tabel 3.10 Diameter Poros Defleksi Puntiran pada Speed Box
Poros T (N.cm) ds baru (mm) ds diambil (mm) I 253.825 29.102 30 II 296.130 30.245 32 III 710.711 37.645 38 IV 1776.778 47.336 48 V 7107.112 66.943 70 Pembalik 190.369 27.082 30
Poros dengan menggunakan transmisi roda gigi perlu dibuat alur pasak pada poros tersebut. Perencanaan pada poros I dengan ds = 30 mm, dibuat alur pasak
dengan ukuran 10 x 5 x radius fillet 0,6.
τs . Sf2 ≥ τ . α
Dimana : α = Faktor konsentrasi tegangan. s d r = 30 6 , 0 = 0,02
sehingga dari diagram R.E. Peterson didapatkan α = 2,65
τ = 2 2 3 ( ) ( ) 16 T K M K ds m⋅ + t ⋅ ⋅ π (3.19) = 3 (1,5 329,97)2 (1,5 253,83)2 3 16 ⋅ + ⋅ ⋅ π = 117,79 N/cm2 Diperoleh 1000 . 2 > 117,79 . 2,65
Ukuran alur pasak pada masing-masing poros ditampilkan pada tabel dibawah ini:
Tabel 3.11 Alur Pasak Poros pada Speed Box
Poros Ukuran alur
pasak Poros Ukuran alur pasak I 10 x 5 x 0,6 IV 14 x 5,5 x 1,0 II 10 x 5 x 0,6 V 20 x 7,5 x 1,0 III 12 x 5 x 0,6 Pembalik 8 x 4 x 0,4
Hal yang tidak kalah penting dari perancangan sebuah poros adalah kecepatan kritis, khususnya pada poros putaran tinggi. Bila poros berputar pada kecepatan kritisnya maka akan terjadi getaran yang besar. Oleh karena itu diambil pedoman bahwa putaran poros maksimum demi keamanan tidak boleh melebihi 80 % putaran kritisnya. Putaran kritis pada poros I adalah sebagai berikut:
Nc = W L l l ds 2 1 2 52700 ⋅ (rpm) (3.20)
(Sularso, Dasar Perencanaan dan Pemilihan Eleman Mesin, hal. 19) Dimana : ds = Diameter poros (mm)
l1 , l2 = Jarak titik beban ke bantalan (mm)
L = Jarak antar bantalan (mm)
Berat poros : Ws = γ π ⋅ L⋅ ds2 4 (N) (3.21) Dimana :
γ = berat jenis baja = 7,86 . 10-3
(N/cm3) Berat roda gigi :
WG = 0,118 . z . b . m2 (N) (3.22)
(Khurmi, R.S., A Text Book of Machine Design, hal 1020) Dimana :
z = jumlah gigi roda gigi b = Lebar roda gigi (cm) m = modul roda gigi (cm) Sehingga diperoleh :
Ws = 32 18,5 7,86 .10-3
4 ⋅ ⋅
π
= 1,028 N
(Setengah dari berat poros ini dianggap sebagai beban terpusat di tengah.) Wzr1 = 0,118 . 24 . 3 . 0,32 = 0,76464 N
Wz1 = 0,118 . 24 . 3 . 0,32 = 0,76464 N
Kecepatan kritis dari masing-masing benda yang berputar pada poros I :
Nc1 = 765 , 0 185 135 50 30 52700 2 ⋅ = 109296,6 rpm Nc2 = 765 , 0 185 50 135 30 52700 2 ⋅ = 109296,6 rpm Nc3 = 514 , 0 185 5 , 92 5 , 92 35 52700 2 ⋅ = 105173,7 rpm Maka: 2 3 2 2 2 1 2 1 1 1 1 c c c c N N N N = + + (3.23) = 2 2 2 105173,7 1 109296,6 1 109296,6 1 + +