1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Digital earth surface mapping dapat dilakukan dengan teknologi yang beragam, diantaranya metode terestris, ekstra terestris, pemetaan fotogrametri, citra satelit, dan lainnya. Salah satu teknologi metode ekstra terestris menggunakan GNSS (Global Navigation Satellite System). Teknologi GNSS memadukan dua sistem satelit navigasi, yaitu GPS dan Glonass, sehingga memiliki tingkat ketelitian yang optimal untuk keperluan surveying.
Salah satu kegunaan teknologi GNSS adalah positioning untuk berbagai bidang pekerjaan, antara lain bidang engineering terhadap pekerjaan built. Pekerjaan as-built membutuhkan titik kontrol sebagai acuan dalam pengukuran. Kerangka kontrol yang digunakan untuk menghasilkan titik kontrol tersebut sangat beragam. Pada penelitian ini menggunakan kerangka kontrol berupa jaring kontrol GNSS berbentuk quadrilateral. Jaring kontrol GNSS tersebut didesain agar memiliki konfigurasi baseline yang optimal, oleh karena itu perlu dilakukan evaluasi konfigurasi baseline pada jaring tersebut.
Evaluasi konfigurasi baseline dapat dilihat berdasarkan kriteria presisi, akurasi, dan kehandalan. Berdasarkan kriteria presisi dapat dilihat dari nilai faktor kekuatan jaring. Semakin kecil nilai faktor kekuatan jaring akan semakin optimal konfigurasi baseline jaring kontrol GNSS tersebut. Menurut Yalҫinkaya dan Teke (2006) merujuk pada Grafarend (1974), evaluasi konfigurasi baseline berdasarkan kriteria akurasi dapat dilihat dari nilai A-Optimality, D-Optimality, E-Optimality, S-Optimality, dan I-Optimality. Evaluasi konfigurasi baseline berdasarkan kriteria kehandalan menurut Yalҫinkaya dan Teke (2006) merujuk pada Baarda (1968) dapat dilihat dari nilai redudansi individu, nilai kehandalan dalam, dan nilai kehandalan luar.
Pada penelitian ini, jaring kontrol GNSS tersebut terdiri atas empat buah titik kontrol. Salah satu titik kontrol tersebut diasumsikan sebagai titik ikat. Jaring kontrol GNSS tersebut didesain dengan empat buah konfigurasi baseline dengan spesifikasi orde-3, karena pada tahap selanjutnya metode penentuan posisi yang digunakan dalam
2 melakukan akuisisi data jaring kontrol tersebut adalah metode relatif statik menggunakan receiver GNSS dengan spesifikasi pengukuran orde-3. Berdasarkan keempat desain konfigurasi baseline tersebut, dapat dievaluasi konfigurasi baseline jaring kontrol GNSS yang paling optimal dari segi presisi, akurasi, dan kehandalan. Penelitian ini mengambil lokasi di wilayah Jalan Layang Jombor, Kabupaten Sleman, Provinsi DI Yogyakarta.
I.2. Identifikasi Masalah
Hasil pekerjaan as-built dipengaruhi ketelitian titik kontrol yang digunakan sebagai acuan pengukuran. Ketelitian titik kontrol yang optimal dihasilkan dari jaring kontrol dengan konfigurasi baseline yang optimal. Peneliti menggunakan jaring kontrol GNSS quadrilateral dengan empat buah desain konfigurasi baseline yang berbeda. Oleh karena itu perlu dilakukan evaluasi dari setiap konfigurasi baseline pada jaring tersebut berdasarkan kriteria presisi, akurasi, dan kehandalan. Kriteria presisi dilihat berdasarkan nilai faktor kekuatan jaring dengan mempertimbangkan matriks varian-kovarian ukuran. Kriteria akurasi jaring berdasarkan kriteria A-Optimality, D-Optimality, E-D-Optimality, S-D-Optimality, dan I-Optimality. Kriteria kehandalan berdasarkan redudansi individu, kehandalan dalam, dan kehandalan luar.
I.3. Pertanyaan Penelitian
Pertanyaan penelitian yang diajukan pada penelitian ini adalah:
1. Bagaimanakah konfigurasi baseline yang paling optimal dari segi presisi berdasarkan kriteria faktor kekuatan jaring ?
2. Bagaimanakah konfigurasi baseline yang paling optimal dari segi akurasi berdasarkan kriteria A-Optimality, D-Optimality, E-Optimality, S-Optimality, dan I-Optimality ?
3. Bagaimanakah konfigurasi baseline yang paling optimal dari segi kehandalan berdasarkan kriteria redudansi individu, kehandalan dalam dan kehandalan luar ?
I.4. Batasan Masalah
Cakupan penelitian yang dibahas dalam penelitian ini adalah:
1. Alat yang digunakan untuk akuisisi data yaitu Handheld GPS Garmin 60CSX dan receiver GNSS Javad Triumph-1.
3 2. Metode pengolahan data yang digunakan untuk mendapatkan nilai estimasi koordinat menggunakan hitung kuadrat terkecil metode parameter terkendala minimal.
3. Analisis kepresisian jaring berdasarkan nilai faktor kekuatan jaring dengan mempertimbangkan nilai matriks varian-kovarian.
4. Analisis akurasi jaring berdasarkan kriteria A-Optimality, D-Optimality, E-Optimality, S-E-Optimality, dan I-Optimality.
5. Analisis kehandalan jaring berdasarkan kriteria redudansi individu, kehandalan dalam, dan kehandalan luar.
6. Titik kontrol 1 diasumsikan sebagai titik fixed.
I.5. Tujuan Penelitian
Tujuan dari penelitian ini adalah
1. Terbentuknya jaring kontrol GNSS orde-3 dengan konfigurasi baseline yang optimal dari segi presisi berdasarkan nilai faktor kekuatan jaring.
2. Terbentuknya jaring kontrol GNSS orde-3 dengan konfigurasi baseline yang optimal dari segi akurasi berdasarkan kriteria A-Optimality, D-Optimality, E-Optimality, S-E-Optimality, dan I-Optimality.
3. Terbentuknya jaring kontrol GNSS orde-3 dengan konfigurasi baseline yang optimal dari segi kehandalan berdasarkan kriteria redudansi individu, kehandalan dalam dan kehandalan luar.
I.6. Manfaat Penelitian
Manfaat dari penelitian ini adalah
1. Diperoleh jaring kontrol GNSS orde-3 dengan konfigurasi baseline yang optimal dari segi presisi, akurasi, dan kehandalan.
2. Jaring kontrol GNSS orde-3 dengan konfigurasi baseline yang optimal dapat digunakan untuk pengadaan titik kontrol pengukuran as-built superelevasi Jalan Layang Jombor.
I.7. Tinjauan Pustaka
Amiri-Simkooei (2001) melakukan penelitian tentang perbandingan kriteria kehandalan dan kekuatan jaring geodesi. Desain yang optimal dan tepat adalah suatu penilaian terhadap jaring geodesi, merupakan suatu bagian yang utuh dari kebanyakan
4 pekerjaan teknik pemetaan. Optimasi dilakukan sebelum pengukuran dilakukan. Sebuah jaring geodesi didesain dan dilakukan optimasi dalam hal kehandalan yang tinggi, agar hasilnya dapat dibandingkan dengan perolehan menggunakan teknik analisis ketahanan. Tujuan dari sebuah desain yang optimal adalah untuk menyelesaikan konfigurasi jaring (desain orde-1) dan akurasi pengamatan (desain orde-2) agar mendapatkan kriteria yang diinginkan. Untuk tujuan ini, suatu metode analisis disajikan untuk melakukan desain orde pertama, desain orde kedua, dan atau gabungan dari kedua desain. Dalam rangka mengevaluasi kekuatan geometris jaringa geodesi, hasil analisis ketahanan ditampilkan dalam hal ketahanan rotasi, ketahanan pergeseran, dan ketahanan skala. Hasil penelitian menunjukkan bahwa parameter ketahanan atau kehandalan dipengaruhi oleh nilai redundansi. Pengamatan yang memiliki parameter kehandalan paling baik adalah pengamatan dengan nilai redudansi minimum.
Sriani dan Cahyadi (2011) melakukan penelitian optimasi jaring pada pengukuran orde-3 menggunakan perataan parameter untuk menghasilkan desain jaring yang optimal dan mengetahui pengaruh kesalahan titik ikat pada hasil akhir perhitungan. Untuk keperluan pengambilan data menggunakan titik orde-3 Kota Banjarmasin sebanyak 44 titik, dua titik ikat orde-2, dan sebanyak 131 baseline. Perhitungan perataan jaring bebas dan perataan jaring terikat menggunakan program Matlab 7.11. Hitungan dilakukan dengan metode perataan parameter. Hasil penelitian ini menjelaskan bahwa desain geometri jaringan yang mempunyai nilai standar deviasi terkecil tidak selalu menghasilkan ketelitian yang baik ketika pengukuran telah dilakukan. Hal ini dipengaruhi oleh distribusi titik ikat serta perambatan kesalahan standar deviasi titik ikat tersebut. Penambahan jumlah baseline, loop, dan common baseline pada suatu jaring dapat memberikan hasil terbaik apabila didukung oleh ketelitian yang baik pada masing–masing baseline.
Widiyarto (2012) melakukan penelitian tentang optimasi jaring kontrol horizontal untuk pemantauan deformasi Waduk Sermo di Kabupaten Kulon Progo. Dalam penelitian tersebut dibuat dua buah desain jaring kontrol, yaitu desain 1 dan desain 2. Pengukuran dilakukan terhadap sudut dan jarak dari masing-masing titik kontrol dengan menggunakan alat Total Station DTM 322. Pengolahan data menggunakan hitung kuadrat terkecil metode parameter. Analisis hasil pengolahan
5 data desain 1 dan desain 2 menggunakan kriteria kepresisian optimasi jaring kontrol berdasarkan N-Optimality, A-Optimality, S-Optimality, dan D-Optimality. Hasil dari penelitian tersebut adalah desain yang memiliki kriteria presisi paling optimal adalah desain 2 pada proses ketujuh. Desain tersebut memiliki tingkat kualitas dan kekuatan jaring paling tinggi. Nilai optimasi berdasarkan kriteria kepresisian desain jaring 2 proses ketujuh yaitu A-Optimality = 0,0081 m, N-Optimality = 0,0053 m, S-Optimality = 0,0052 m, D-Optimality = 1,5685E-52 m.
Lestari dan Yulaikhah (2013) melakukan penelitian tentang optimasi jaring kontrol horizontal untuk studi geodinamika di Patahan Sesar Opak. Konfigurasi dari desain jaring SGY dan OPK yang telah dibuat memiliki estimasi ketelitian posisi titik-titik kontrol pada jaring dibawah fraksi 1 mm. Berdasarkan matriks varian-kovarian parameter yang diperoleh dari hasil perataan menunjukkan bentuk desain jaring SGY dan OPK memiliki kekuatan geometri yang bagus. Pemilihan jaring kontrol horizontal dengan kekuatan konfigurasi jaring yang baik diperlukan untuk mendapatkan ketelitian posisi titik kontrol yang optimal untuk studi pemantauan geodinamika Patahan Sesar Opak kedepannya.
Rachman (2014) melakukan optimasi desain jaring GPS wilayah kampus UGM dengan menggunakan citra Google Earth. Analisis akurasi jaring menggunakan kriteria A-Optimality, D-Optimality, E-Optimality, S-Optimality, I-Optimality. Analisis kehandalan jaring menggunakan kriteria redudansi individu, kehandalan luar, kehandalan dalam. Metode hitungan yang digunakan untuk estimasi koordinat adalah hitung kuadrat terkecil metode parameter. Hasil penelitian tersebut adalah nilai fungsi tujuan akurasi A-Optimality dan E-Optimality memiliki pengaruh yang paling besar. Fungsi tujuan akurasi A-Optimality yang terbesar 7,991 dimiliki oleh desain yang menggunakan baseline paling sedikit, sedangkan nilai fungsi tujuan akurasi A-Optimality yang terkecil 5,004 dimiliki oleh desain yang menggunakan baseline paling banyak. Nilai fungsi tujuan akurasi E-Optimality pada semua desain bernilai 1, ini menunjukkan bahwa semua desain memiliki jaring yang isotropik. Fungsi tujuan akurasi D-Optimality yang terkecil 4,71E-10. Fungsi tujuan akurasi S-Optimality yang terkecil 0,833. Fungsi tujuan akurasi I-Optimality yang terkecil 4,988. Jaring dengan nilai reduansi individu paling besar adalah yang paling optimal, yaitu sebesar 0,93.
6 Jaring dengan jumlah baseline paling sedikit memiliki nilai kehandalan dalam paling baik yaitu sebesar 2,32. Jaring dengan jumlah baseline paling banyak memiliki kehandalan luar paling baik yaitu sebesar 2,46. Semua desain memiliki kesalahan ke arah sumbu X dan Y yang sama, karena bobot yang digunakan merupakan matriks identitas.
Nursetyadi (2015) melakukan penelitian pengaruh geometri jaringan IGS terhadap ketelitian koordinat titik pantau geodinamika Kepulauan Sangihe epoch 2014. Penelitian tersebut menggunakan data primer dan data sekunder. Data primer yang digunakan adalah hasil pengukuran GNSS dengan menggunakan receiver dual frequency. Data sekunder berupa data stasiun IGS untuk masing–masing desain jaring pengolahan. Pengolahan data GNSS menggunakan perangkat luanak ilmiah GAMIT/GLOBK. Hasil penelitian tersebut yaitu geometri jaring dengan tujuh titik stasiun IGS yang tersebar pada empat kuadran dengan kekuatan jaring yang paling baik memberikan ketelitian koordinat yang lebih tinggi, tetapi tidak signifikan secara statistik jika dibandingkan dengan jaring tiga dan dua kuadran. Jaring rik2 memiliki nilai faktor kekuatan jaring yang paling kecil yaitu 2,76 x 1038, sehingga konfigurasi jaring semakin baik. Semakin besar bobot baseline yang digunakan, maka semakin kecil nilai faktor kekuatan jaring. Jaring dengan nilai reduansi individu paling besar adalah yang paling optimal, yaitu sebesar 0,96. Hasil pengujian kehandalan dalam dan kehandalan luar jaring diperoleh bahwa jaring project rik2, rik5, rik6 merupakan jaring dengan kehandalan paling baik. Nilai kehandalan dalam minimum sebesar 0,922 dan maksimal sebesar 10,232. Nilai kehandalan luar minimum yaitu sebesar 1,428 dan maksimal sebesar 12,282.
I.8. Landasan Teori I.8.1. Optimasi Jaring Kontrol
Optimasi jaring kontrol adalah suatu teknik yang digunakan dalam mendesain konfigurasi distribusi titik-titik kontrol dan melakukan perencanaan pengukuran, sehingga dapat menghasilkan geometri jaring dengan kehandalan yang tinggi, akurasi yang bagus, dan harga yang ekonomis (Anonim, 2012). Persoalan dalam melakukan optimasi adalah membuat nilai suatu fungsi menjadi maksimum atau minimum yang
7 menggambarkan kualitas dari suatu jaring terhadap nilai pembatas yang sudah ditentukan.
Dalam melakukan optimasi jaring dilakukan analisis pra pengukuran yang bertujuan untuk menentukan bentuk geometri jaring, standar ketelitian ukuran yang harus dicapai, jenis peralatan yang digunakan saat melakukan akuisisi data, dan prosedur pengukuran dilakukan di lapangan, sehingga dapat meminimalisasi terjadinya kesalahan sistematis. Kualitas jaring kontrol GNSS ditentukan oleh tiga faktor, yaitu presisi, akurasi, dan kehandalan.
I.8.1.1. Presisi dan akurasi. Presisi adalah derajad konsistensi antara pengukuran berdasarkan nilai ketidaksesuaian dari suatu data (Wolf dan Ghilani, 2006). Derajad kepresisian dapat diperoleh dengan bergantung kepada kestabilan lingkungan pada saat pengukuran, kualitas peralatan yang digunakan pada saat pengukuran, prosedur pengukuran, dan kemampuan sumber daya manusianya. Sedangkan akurasi adalah kedekatan nilai hasil ukuran dengan nilai sebenarnya (Wolf dan Ghilani, 2006).
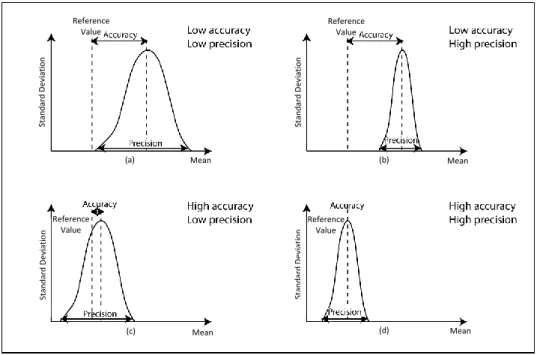
Gambar I.1. Perbandingan presisi dan akurasi pada kurva distribusi normal Pada Gambar I.1 menyajikan perbandingan presisi dan akurasi pada kurva distribusi normal. Gambar I.1(a) menunjukkan presisi dan akurasi yang rendah, karena nilai rata-rata dengan derajad kepercayaan rendah dan nilai rata-rata ukuran tidak
Mean a Mean Mean Mean St an d ar d D ev iat io n St an d ar d D ev iat io n St an d ar d D ev iat io n St an d ar d D ev iat io n (a) (b) (c) (d) Reference Value Reference Value Reference Value Reference Value
8 mendekati nilai sebenarnya. Gambar I.1(b) menunjukkan data yang presisi, tetapi tidak akurasi, karena dengan menggunakan derajad kepercayaan yang tinggi data akan mengumpul, tetapi nilai rata-rata ukuran tidak mendekati nilai sebenarnya. Gambar I.1(c) menunjukan akurasi data, tetapi tidak presisi, karena nilai rata-rata ukuran mendekati nilai sebenarnya dan derajad kepercayaan rendah. Gambar I.1(d) menunjukan data yang presisi dan akurasi, karena derajad kepercayaan tinggi dan nilai rata-rata ukuran mendekati nilai sebenarnya.
I.8.1.2. Kualitas jaring kontrol GNSS berdasarkan kriteria presisi. Nilai kepresisian suatu jaringan mendeskripsikan pengaruh terhadap hasil estimasi melalui konfigurasi baseline jaring kontrol, yang menyatakan karakteristik dari jaring kontrol GNSS dalam perambatan kesalahan acak suatu pengukuran, dengan mengasumsikan bahwa data ukuran sudah terbebas dari kesalahan kasar dan sistematik. Kepresisian dari suatu jaring digambarkan dari faktor kekuatan jaringan dengan mempertimbangkan matriks varian-kovarian pengamatan. Model matematisnya dapat dituliskan dalam persamaan (I.1) dan (I.2) (Abidin,2000) :
Fator kekuatan jaringan = trace(A
T∑yy −1A)−1
𝑢 ………..…...………....(I.1) ∑yy =
𝜎
𝑜2 𝐴(ATPA)−1AT.………..……….….………….…...(I.2) Dalam hal ini,trace(AT∑yy −1A)−1 : jumlah diagonal matriks (AT∑yy −1A)−1 ∑yy : matriks varian-kovarian ukuran
: varian aposteriori
A : matriks turunan fungsi pengamatan terhadap parameter
P : matriks bobot
u : jumlah parameter
I.8.1.3. Kualitas jaring kontrol GNSS berdasarkan kriteria akurasi. Suatu pengukuran dikatakan akurat apabila rata-rata dari kesalahannya setelah dihitung dengan metode hitung kuadrat terkecil nilainya mendekati nol atau nilainya sama dengan nol. Tingkat akurasi dari suatu jaring titik kontrol dapat dilihat pada nilai matriks varian-kovarian koordinat titik. Dalam menentukan jaring titik kontrol GNSS
9 dengan konfigurasi baseline yang optimal, fungsi objektif dipilih dari kriteria akurasi global. Analisis yang digunakan berdasarkan kriteria fungsi akurasi yaitu A-Optimality, D-A-Optimality, E-A-Optimality, S-A-Optimality, dan I-Optimality.
1. A-Optimality
A-Optimality adalah sebuah kriteria optimasi jaring yang didasarkan pada meminimalkan varian rata–rata matriks trace, yang dihitung berdasarkan penjumlahan dai nilai-nilai eigen (λ) dari matriks kofaktor (Kuang, 1996). Nilai trace dibandingkan dengan nilai trace pada jaring yang lain. Suatu desain jaring dikatakan paling optimal diantara desain lainnya apabila hasil perbandingan nilai trace-nya paling minimum. Menurut Kuang (1996) rumus untuk mencari A-Optimality dengan persamaan (I.3) : Trace (QXX) = λ1+ λ2 +...+λ𝑛 = minimum ... (I.3) Dalam hal ini,
λ1, λ2,...λ𝑛 : nilai eigen matriks QXX QXX : matriks kofaktor
Matriks kofaktor dapat ditentukan dengan persamaan (I.4) :
QXX = (𝐴𝑇𝑃𝐴)−1 ... (I.4) Dalam hal ini,
A : matriks turunan terhadap parameter
𝐴𝑇 : transpose dari matriks turunan terhadap parameter P : matriks bobot
2. D-Optimality
D-Optimality adalah sebuah kriteria optimasi jaring yang didasarkan pada determinan dari nilai eigen pada proses perataan suatu jaring titik kontrol (Kuang, 1996). Suatu desain jaring dikatakan paling optimal diantara desain lainnya apabila memiliki nilai D-Optimality yang paling kecil. Menurut Kuang (1996) rumus untuk mencari D-Optimality dengan persamaan (I.5) :
Det(QXX) = λ1* λ2 *...*λ𝑛 = minimum.……… (I.5) Dalam hal ini,
λ1, λ2,...λ𝑛 : nilai eigen matriks QXX QXX : matriks kofaktor
10 3. E-Optimality
E-Optimality adalah sebuah kriteria optimasi jaring yang didasarkan pada nilai minimum untuk nilai eigen maksimum dari matriks kofaktor (Kuang, 1996). Suatu desain jaring dikatakan paling optimal diantara desain lainnya apabila memiliki nilai Optimality yang paling kecil. Menurut Kuang (1996) rumus untuk mencari E-Optimality dengan persamaan (I.6) :
[QXX] = minimum ... (I.6) Dalam hal ini,
[QXX] : nilai norm dari matriks QXX 4. S-Optimality
S-Optimality adalah sebuah kriteria optimasi jaring yang didasarkan pada selisih antara nilai maksimum dari nilai eigen dengan nilai minimumnya (Kuang, 1996). Suatu desain jaring dikatakan paling optimal diantara desain lainnya apabila memiliki nilai S-Optimality yang paling kecil. Menurut Kuang (1996) rumus untuk mencari S-Optimality dengan persamaan (I.7) :
11 L o ka l G lo ba l
Tabel I.1. Kriteria akurasi jaring kontrol GNSS (Yalçinkaya dan Teke, 2006)
Dalam hal ini,
λmax: nilai eigen maksimum setiap desain jaring titik kontrol λmin: nilai eigen minimum setiap desain jaring titik kontrol
Keterangan Tabel I.1 :
mx, my, mz : nilai simpangan baku koordinat yang dicari. λi : nilai eigen dari matriks kofaktor parameter.
I.8.1.4. Kualitas jaring kontrol GNSS berdasarkan kriteria kehandalan. Salah satu kualitas jaring ditentukan oleh kehandalan jaring. Kehandalan jaring bergantung pada geometri dari suatu jaring, yaitu matriks konfigurasi dan matriks bobot suatu pengukuran. Konsep kehandalan jaring menurut Yalҫinkaya dan Teke (2006) merujuk pada Baarda (1968) adalah kemampuan suatu jaring untuk mendeteksi dan menolak kesalahan kasar dari suatu pengamatan. Kehandalan jaring ada dua jenis, yaitu kehandalan dalam dan kehandalan luar.
Fungsi Objektif Akurasi
Helmert point error Z = mP1√m𝑋1
2 + m 𝑋2
2 + m 𝑋3
2
Werkmeister point error Z w pİ m X m Y m Z
Z A H m0 √λ1 ; BH m0√λ2 ;
CH m0√λ3
Mean coordinate error Z m x , m y , m z m0
√
tr(QXX)
3p
Z = tr(QXX) = λ1+ λ2 +...+λ𝑛 = ∑λi
= ∑ Type equation here.
Z = det(QXX) = λ1* λ2 *...*λ𝑛 = ∏λi Z λmax
Z λmax - λmin
Z 1 λmax / .λmin
Helmert point error ellipsoid semi-axes
Objective function for A-Optimal network Objective function for
D-Optimal network Objective function for
E-Optimal network Objective function for
S-Optimal network Objective function for
12 Kehandalan dalam jaring kontrol menggambarkan kualitas jaring yang mengacu pada batas minimal dari kesalahan kasar yang dapat dideteksi pada sejumlah pengamatan untuk nilai probabilitas yang diberikan terhadap kesalahan tipe I dan tipe II. Kehandalan luar jaring kontrol menggambarkan efek terbesar dari kesalahan kasar yang tidak terdeteksi pada estimasi besaran parameter yang tidak diketahui (Seemkooei 2001).
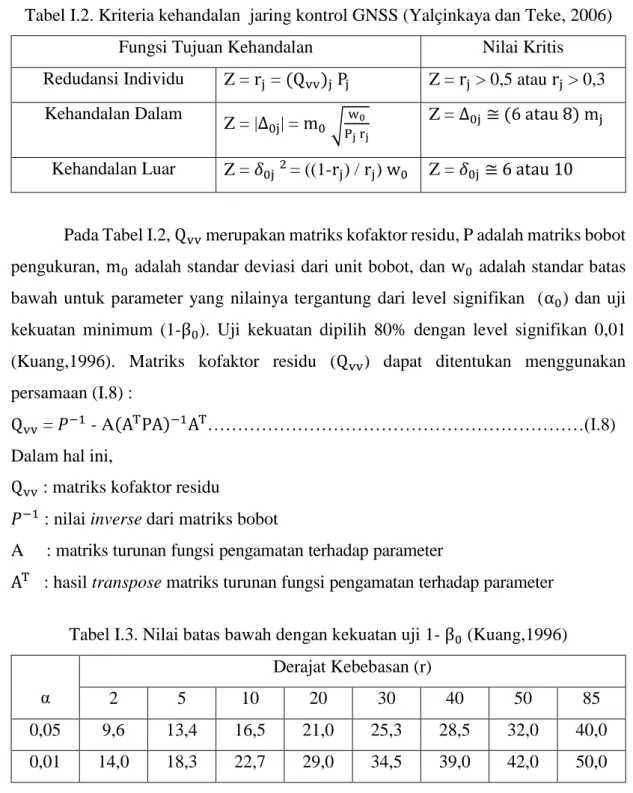
Tabel I.2. Kriteria kehandalan jaring kontrol GNSS (Yalçinkaya dan Teke, 2006)
Fungsi Tujuan Kehandalan Nilai Kritis
Redudansi Individu Z = rj = (Qvv)j Pj Z = rj > 0,5 atau rj > 0,3 Kehandalan Dalam
Z = |∆0j| = m0 √ w0
Pj rj
Z = ∆0j ≅ (6 atau 8) mj
Kehandalan Luar Z = 𝛿0j2 = ((1-rj) / rj) w0 Z = 𝛿0j ≅ 6 atau 10
Pada Tabel I.2, Qvv merupakan matriks kofaktor residu, P adalah matriks bobot pengukuran, m0 adalah standar deviasi dari unit bobot, dan w0 adalah standar batas bawah untuk parameter yang nilainya tergantung dari level signifikan (α0) dan uji kekuatan minimum (1-β0). Uji kekuatan dipilih 80% dengan level signifikan 0,01 (Kuang,1996). Matriks kofaktor residu (Qvv) dapat ditentukan menggunakan persamaan (I.8) :
Qvv = 𝑃−1 - A(ATPA)−1AT………(I.8) Dalam hal ini,
Qvv : matriks kofaktor residu
𝑃−1 : nilai inverse dari matriks bobot
A : matriks turunan fungsi pengamatan terhadap parameter
AT : hasil transpose matriks turunan fungsi pengamatan terhadap parameter Tabel I.3. Nilai batas bawah dengan kekuatan uji 1- β0 (Kuang,1996)
α
Derajat Kebebasan (r)
2 5 10 20 30 40 50 85
0,05 9,6 13,4 16,5 21,0 25,3 28,5 32,0 40,0 0,01 14,0 18,3 22,7 29,0 34,5 39,0 42,0 50,0
13 Perhitungan kehandalan dalam menurut Seemkooei (2001) merujuk pada Baarda (1968) disajikan dalam bentuk persamaan (I.9) :
∆0li = δ0σ𝑙𝑖
√ri ………...……...(I.9)
Dalam hal ini,
∆0li : nilai kehandalan dalam masing–masing ukuran
δ0 : standar batas bawah untuk parameter yang nilainya tergantung dari level signifikan (α0) dan uji kekuatan minimum (1-β0)
σ𝑙𝑖 : standar deviasi ukuran ke-i
rj : nilai redudansi individu ukuran ke-i
Pada penelitian ini menggunakan dua buah persamaan yang berbeda untuk menghitung kehandalan dalam. Perbedaan antara perhitungan kehandalan dalam menurut Seemkooei (2001) merujuk pada Baarda (1968) yang disajikan pada persamaan (I.9) dan menurut Yalçinkaya dan Teke (2006) yang disajikan pada Tabel (I.2) terletak pada penggunaan bobot ukuran. Persamaan pada Tabel (I.2) menggunakan standar deviasi unit bobot ukuran dan bobot ukuran, sedangkan pada persamaan (I.9) tidak menggunakan standar deviasi unit bobot ukuran dan bobot ukuran, melainkan standar deviasi ukuran. Kehandalan dalam dihitung dengan nilai batas bawah 80% dengan level signifikan 0,01 (Kuang,1996).
I.8.2. Hitung Perataan Kuadrat Terkecil Metode Parameter
Hitung perataan dengan prinsip kuadrat terkecil merupakan perataan yang paling teliti. Hitung perataan dengan prinsip kuadrat terkecil tidak meratakan data pengamatan atau koordinat stasiun, tetapi suatu proses menghitung secara statistik atau mengestimasi nilai-nilai bilangan (parameter) berdasarkan data pengamatan yang sudah ada. Hitung perataan dengan prinsip kuadrat terkecil pada jaring kontrol digunakan untuk mengintegrasikan baseline secara benar dan konsisten, sehingga titik kontrol memiliki solusi yang unik. Prinsip kuadrat terkecil adalah menghitung jumlah kuadrat dari koreksi yang diberikan pada ukuran adalah minimum dengan nilai besaran
14 pengamatan pada persamaan tersebut merupakan fungsi parameter (Wolf dan Ghilani, 1997).
Hitung perataan dengan prinsip kuadrat terkecil yang digunakan dalam optimasi jaring kontrol GNSS pada penelitian ini adalah metode parameter terkendala minimal. Pada hitung kuadrat terkecil metode parameter terkendala minimal, menggunakan minimal satu buah titik ikat dalm proses perhitungan kuadrat terkecil. Parameter yang dicari nilainya dihitung secara langsung. Setelah menentukan parameter, penyelesaiannya didasarkan pada sejumlah persamaan yang menyatakan hubungan fungsional antara masing-masing ukuran dengan parameter. Hal yang harus diperhatikan dari hitung perataan dengan prinsip kuadrat terkecil metode parameter yaitu jumlah persamaan sama dengan jumlah ukuran hasil pengamatan. Persamaan model matematis hitung perataan dengan prinsip kuadrat terkecil metode parameter dapat dituliskan dengan persamaan (I.10) dan (I.11) (Widjajanti dan Heliani, 2005) :
La = F(Xa) ………...……(I.10)
F(Xa) = F(Xo + X)…...………...…...(I.11) Nilai estimasi pengamatan dapat dirumuskan dengan persamaan (I.12) dan (I.13) :
La = Lb + V……….…..……...(I.12)
Lb + V = F(Xo + X)……….…...…….(I.13) Dengan mengasumsikan bahwa nilai Lb masih mengandung kesalahan acak, oleh karena itu perlu dikoreksikan dengan nilai besaran kesalahan acak V (residu). Persamaan (I.13) belum linier, sehingga perlu dilinierisasikan dengan deret Taylor untuk mendapatkan persamaan pengamatan.
Lb + V = F(Xo)
+
𝜕𝐹 𝜕𝑎|
𝑋𝑎=𝑋X +……….…….……...………..….(I.14) Lb + V = F(Xo) + AX……….….……….…...(I.15) V = AX + F(Xo) – Lb……….………...…..(I.16) V = AX + L………..………..(I.17)Dalam hal ini,
La : nilai pengamatan terkoreksi Lb : nilai pengamatan
15 L : selisih nilai pengamatan dengan nilai pendekatan
V : matriks nilai residu atau koreksi pengamatan X : matriks nilai koreksi parameter
Xo : matriks nilai pendekatan parameter
Berdasarkan kuadrat nilai residu pada persamaan (I.17) dapat diperoleh persamaan (I.18) s.d. (I.21) :
VTPV = (AX + L)T P (AX + L)………...……….(I.18) VTPV = (XTAT+ LT)P (AX + L)………..………..…..(I.19) VTPV = (XTATPAX) + XTATPL + LTPAX + LTPL.………....…...(I.20) VTPV = XTATPAX + 2XTATPL + LTPL………...………(I.21) Berdasarkan prinsip kuadrat terkecil ∑ VTPV = minimum, yang disajikan pada persamaan (I.22) :
𝜕 𝑉𝑇𝑃𝑉
𝜕𝑋 = 0………...………..…….(I.22)
Sehingga diperoleh persamaan (I.23), 𝜕𝑉
𝜕𝑋 =
𝜕 (𝐴𝑋−𝐿)
𝜕𝑋 = A……….….……...(I.23)
Dari persamaan (I.23) dapat dihitung nilai koreksi parameter, seperti pada persamaan (I.24) :
X = -(ATPA)−1ATPL……….……….……(I.24) Dalam hal ini,
X : matriks koreksi parameter
A : matriks turunan fungsi pengamatan terhadap parameter P : matriks bobot
L : selisih nilai pengamatan dengan nilai pendekatan
Nilai parameter terkoreksi dapat ditentukan dengan persamaan (I.25) :
Xa = Xo + X……….…………..……..(I.25)
16 X𝑎 : matriks nilai parameter terkoreksi
Xo : matriks nilai pendekatan parameter X : matriks koreksi parameter
Varian aposteriori dapat dihitung dengan persamaan (I.26) :
𝜎̂𝑜2 = 𝑉
𝑇𝑃𝑉
𝑛− 𝑢 ………..……...(I.26)
Dalam hal ini,
A : matriks turunan fungsi pengamatan terhadap parameter P : matriks bobot
n : jumlah pengamatan u : jumlah parameter 𝜎̂𝑜2 : varian aposteriori
Untuk mendapatkan ketelitian estimasi residu, harus dilakukan derivatif kovarian residu dari persamaan (I.22) dengan menggunakan hukum perambatan varian-kovarian sehingga didapatkan persamaan (I.27).
∑vv = 𝜎̂𝑜2
(
P−1− 𝐴(ATPA)−1AT).………..……….(I.27) Dalam hal ini,∑vv : matriks varian-kovarian residu
A : matriks turunan fungsi pengamatan terhadap parameter P : matriks bobot
𝜎̂𝑜2 : varian aposteriori
Untuk mendapatkan ketelitian estimasi pengamatan diperoleh dari kovarian estimasi pengamatan dengan menggunakan hukum perambatan varian-kovarian sehingga didapatkan persamaan (I.28).
∑yy = 𝜎̂𝑜2 𝐴(ATPA)−1AT.……….…..….….(I.28) Dalam hal ini,
∑yy : matriks varian-kovarian pengukuran
A : matriks turunan fungsi pengamatan terhadap parameter P : matriks bobot
17 Untuk ketelitian koreksi estimasi parameter didapatkan dari derivatif varian-kovarian parameter dari persamaan (I.25) dengan menggunakan hukum perambatan varian-kovarian sehingga didapatkan persamaan (I.29).
∑xx = 𝜎̂𝑜2 (ATPA)−1.……..………..….…..(I.29) Dalam hal ini,
∑xx : matriks varian-kovarian parameter
A : matriks turunan fungsi pengamatan terhadap parameter P : matriks bobot
𝜎̂𝑜2 : varian aposteriori
I.8.3. Penetapan Kelas dan Orde Jaring Kontrol Horizontal Menurut SNI
Jaring kontrol horizontal diklasifikasikan berdasarkan kelas dan ordenya. Kelas jaring kontrol horizontal terdiri atas enam kelas, yaitu kelas 3A, 2A, A, B, C, dan D. Orde jaring kontrol horizontal terdiri atas orde 00, 0, 1, 2, 3, dan 4.
I.8.3.1. Penetapan kelas jaring kontrol horizontal menurut SNI. Penetapan kelas suatu jaring kontrol horizontal ditetentukan berdasarkan panjang sumbu-panjang dari setiap elips kesalahan relatif dengan tingkat kepercayaan 95% yang dihitung berdasarkan hitung perataan jaring kuadrat terkecil terkendala minimal. Menurut Anonim (2002), panjang maksimum sumbu-panjang elips kesalahan relatif yang digunakan untuk menentukan kelas jaringan dirumuskan pada persamaan (I.34) dan tabel klasifikasi kelas jaringan dapat dilihat pada Tabel I.4.
r = c (d + 0.2)………..(I.34) Dalam hal ini,
r : panjang maksimum dari sumbu-panjang yang diperbolehkan dalam satuan milimeter
c : faktor empirik yang menggambarkan tingkat presisi suatu pengamatan d : jarak antar titik kontrol dalam satuan kilometer
18 Tabel I.4. Klasifikasi kelas jaring kontrol horizontal (Anonim, 2002)
I.8.3.2. Penetapan orde jaring kontrol horizontal menurut SNI. Penetapan orde suatu jaring kontrol horizontal ditentukan berdasarkan panjang sumbu-panjang dari setiap elips kesalahan relatif dengan tingkat kepercayaan 95% yang dihitung berdasarkan hitung perataan jaring kuadrat terkecil terkendala penuh. Orde yang ditetapkan untuk suatu jaring kontrol horizontal tidak boleh lebih tinggi dari orde jaring titik kontrol yang digunakan sebagai titik ikat dan tidak boleh lebih tinggi dari kelasnya. Berdasarkan nilai faktor c tersebut, dapat dibuat kategorisasi orde jaring titik kontrol horizontal seperti pada Tabel I.5.
Tabel I.5. Klasifikasi orde jaring kontrol horizontal (Anonim, 2002)
I.8.4. Jaring Kontrol GNSS
Jaring kontrol GNSS adalah sekumpulan titik kontrol yang satu sama lainnya saling terhubung membentuk garis basis (baseline) yang dikaitkan dengan data ukuran jarak dan/atau sudut, dan koordinatnya dihasilkan dengan receiver GNSS menggunakan metode relatif statik dalam suatu sistem referensi koordinat horizontal tertentu (Anonim, 2002). Komponen dari baseline yaitu vektor koordinat relatif tiga dimensi (∆X,∆Y, ∆Z). Baseline ada dua macam, yaitu baseline trivial dan baseline non-trivial. Baseline trivial dapat diturunkan dari garis-garis basis lainnya dari satu
Orde c (ppm) Jaring Kontrol Jarak (Km) Kelas
0 0,01 Jaring fidusial nasional 1000 3A 0 0,1 Jaring titik kontrol geodetik nasional 500 2A 1 1 Jaring titik kontrol geodetik regional 100 A 2 10 Jaring titik kontrol geodetik lokal 10 B 3 30 Jaring titik kontrol geodetik perapatan 2 C 4 50 Jaring titik kontrol geodetik pemetaan 0,1 D
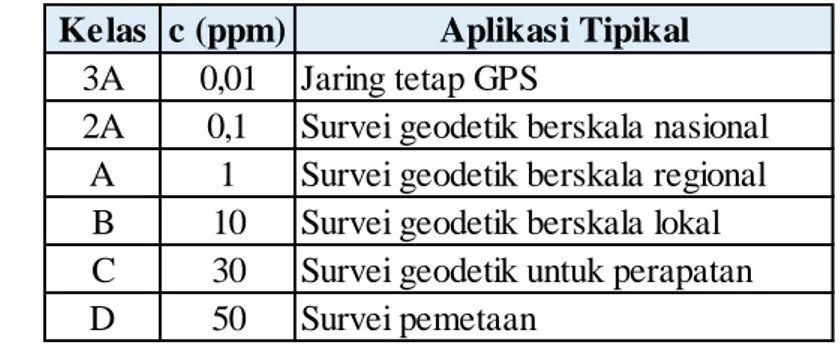
Kelas c (ppm) Aplikasi Tipikal
3A 0,01 Jaring tetap GPS
2A 0,1 Survei geodetik berskala nasional A 1 Survei geodetik berskala regional B 10 Survei geodetik berskala lokal C 30 Survei geodetik untuk perapatan D 50 Survei pemetaan
19 sesi pengamatan. Pada penelitian ini menggunakan jaring kontrol GNSS setingkat orde-3 yang mengacu pada SNI Jaring Kontrol Horizontal. Jarak antar titik kontrol horizontal diusahakan memiliki jarak yang sama dan terhindar dari obstruksi (Anonim, 2002).
I.8.5. GNSS
Menurut definisi yang diberikan dalam dokumen A/CONF.184/BP/4 pada navigasi satelit dan sistem lokasi yang diterbitkan pada tahun 1998 oleh The United Nations sebagai salah satu kontribusi dalam kerangka konferensi The United Nations yang ketiga tentang eksplorasi dan penggunaan yang aman dari luar angkasa, Global Navigation Satellite System (GNSS) adalah “sebuah ruang berbasis sistem penentuan posisi dengan menggunakan gelombang radio yang mencakup satu atau lebih kumpulan satelit, yang ditambahkan sebagai keperluan untuk mendukung pekerjaan yang diharapkan, dan yang menyediakan waktu selama 24 jam untuk penentuan posisi secara tiga dimensi, kecepatan, dan informasi waktu yang lengkap kepada pengguna dimanapun berada, baik itu dekat atau jauh dari permukaan bumi”. GNSS memiliki dua buah elemen inti, yaitu GPS dan GLONASS.
GPS memiliki nama lengkap, yaitu NAVigation Satellite Timing and Ranging Global Positioning System (NAVSTAR GPS). NAVSTAR GPS adalah sebuah sistem navigasi yang tahan di segala cuaca dengan menggunakan sistem ranging, yang dikembangkan oleh Departemen Pertahanan Amerika Serikat untuk memenuhi kebutuhan angkatan militer dalam menentukan posisi, jarak, dan waktu secara akurat dimanapun berada pada jarak kontinu. Konstelasi satelit GPS menempati enam buah orbit yang memiliki bentuk menyerupai lingkaran dan setiap orbit terdiri atas empat buah satelit GPS yang intervalnya tidak sama. Setiap satelit GPS membawa empat buah jam atom. Sudut inklinasi dari orbit satelit GPS sebesar 55º terhadap bidang ekuator. Satelit GPS mengorbit dengan ketinggian rata–rata sekitar 20.200 km di atas permukaan bumi. Satelit GPS memiliki bobot seberat 800 kg, dengan kecepatan bergerak dalam orbitnya sekitar 4 km/s. Satelit GPS mengorbit selama 11 jam dan 58 menit (Hofmann- Welenhof dkk, 2008).
20 GLONASS merupakan singkatan dari Bahasa Rusia “Global’naya Navigatsionnaya Sputnikovaya Sistema”. Pada awalnya GLONASS hanya digunakan untuk kepentingan militer oleh tentara Rusia, kemudian pada tahun 1988 pemerintah Rusia menawarkan GLONASS untuk digunakan oleh rakyat sipil pada pertemuan ICAO. Akhirnya pada bulan Maret 1995, secara resmi pemerintah Rusia menyatakan bahwa GLONASS dapat digunakan oleh rakyat sipil. Satelit GLONASS mengorbit dengan ketinggian rata-rata 19.100 km selama 11 jam 15 menit 44 detik. Konstelasi satelitnya terdiri atas 24 satelit dengan jumlah orbit sebanyak tiga yang terpisah 120 º. Setiap satelit memiliki sudut inklinasi sebesar 64,8 º yang ditempatkan pada setiap orbitnya (Hofmann- Welenhof dkk, 2008).
Perkembangan satelit GNSS yang digunakan untuk penentuan posisi, yaitu : 1. Galileo (Uni Eropa). Galileo adalah sebuah sistem GNSS sipil yang
dioperasikan oleh The European Global Navigation Satellite System Agency (GSA). Galileo mengggunakan 27 buah satelit dengan kemampuan pengoperasian secara penuh untuk pertama kali diajukan pada tahun 2014. Satelit–satelit tersebut secara penuh digunakan pada tahun 2020.
2. BeiDou (China). BeiDou adalah sistem navigasi satelit China. Sistem tersebut terdiri atas 35 satelit. Pelayanan untuk daerah regional mulai beroperasi pada tahun 2012. BeiDou dikembangkan untuk menyediakan cakupan global pada akhir tahun 2020.
3. IRNSS (India). The Indian Regional Navigation Satellite System (IRNSS) menyediakan layanan di India dan area sekelilingnya. Konstelasi dari tujuh buah satelit direncanakan untuk digunakan pada tahun 2015
4. QZSS (Japan). QZSS adalah sistem navigasi satelit regional yang menyediakan layanan ke jepang dan kawasan Asia-Oceania. Sistem QZSS direncanakan digunakan pada tahun 2018.
21 Gambar I.2. Segmen GNSS (www.novatel.com, diakses tanggal 8 Desember 2015)
1. Segmen angkasa. Dalam rangka menyediakan pelayanan penentuan posisi global secara terus menerus, jumlah satelit yang digunakan harus mencukupi. Oleh karena itu harus dipastikan sekurang–kurangnya ada empat buah satelit yang terlihat di setiap tempat dalam waktu yang bersamaan. Satelit GNSS mengorbit pada jarak 20.000 km di atas bumi. Masing–masing GNSS memiliki kumpulan satelitnya sendiri, yang tersusun dalam orbit untuk menyediakan area cakupan yang diinginkan. Pemilihan konstelasi satelit harus mengikuti berbagai optimasi. Kriteria desainnya adalah tanpa keseluruhan, akurasi posisi pengguna, ketersediaan satelit, area cakupan pelayanan, dan geometri satelit. Selanjutnya ukuran dan berat satelit harus diperhitungkan, karena saling berhubungan dengan wahana dan biaya peluncuran. Satelit-satelit GNSS pada dasarnya telah menyediakan platform untuk jam atom, transceiver radio, komputer, dan berbagai macam peralatan pendukung yang digunakan untuk mengoperasikan sistem.
2. Segmen kontrol. Segmen kontrol terdiri atas jaringan yang berada di darat dari stasiun kontrol induk, stasiun upload data, dan stasiun pengamatan. Segmen kontrol bertanggung jawab untuk mengatur seluruh sistem. Tugas segmen tersebut mencakup penyebaran dan pemeliharaan sistem, pelacakan satelit untuk penentuan dan prediksi
22 parameter orbit dan jam, mengamati data tambahan, meng-upload pesan ke satelit, enkripsi kemungkinan data, dan perlindungan pelayanan terhadap pengguna yang tidak resmi.
3. Segmen pengguna. Segmen pengguna dapat diklasifikasikan ke dalam dua kategori, yaitu berdasarkan jenis receiver dan berbagai pelayanan informasi. Kategori pengguna dibagi lagi menjadi pengguna militer dan rakyat sipil, maupun pengguna yang resmi dan tidak resmi. Rakyat sipil dan pengguna tidak rersmi tidak memiliki akses untuk semua sinyal atau pelayanan GNSS.
I.8.6. Metode Penentuan Posisi GNSS
Konsep dasar penentuan posisi dengan GNSS adalah reseksi (pengikatan ke belakang) dengan jarak, yaitu mengukur jarak secara simultan antara receiver ke beberapa satelit yang koordinatnya telah diketahui pada saat yang bersamaan. Kemudian posisi dari satelit tersebut diperkirakan dan dipancarkan bersama sinyal GNSS kepada pengguna. Dengan diketahuinya posisi dan jarak yang diukur antara receiver dan satelit, posisi receiver dapat ditentukan. GNSS menghasilkan data berupa posisi tiga dimensi, baik dalam sistem koordinat kartesian (X,Y,Z) maupun dalam sistem koordinat elipsoid ( φ,λ,h).
I.8.6.1. Metode penentuan posisi secara absolut. Metode penentuan posisi secara absolut juga disebut dengan point positioning. Dalam melakukan penentuan posisi bisa dalam keadaan diam maupun bergerak. Penentuan posisi koordinat di suatu titik menggunakan satu buah receiver, karena titik yang ditentukan posisinya mengacu pada sistem koordinat yang sudah didefinisikan, tidak tergantung pada titik lain. Metode ini menggunakan data pseudorange, sehingga memiliki ketelitian posisi yang rendah. Ketelitian horizontal yang diberikan adalah 10 sampai dengan 20 m dengan derajad kepercayaan 95%. Model matematis penentuan posisi absolut tiga dimensi dengan metode persamaan jarak pseudorange seperti pada persamaan (I.35) dan (I.36) (Hofmann- Welenhof dkk, 2008) :
𝑅𝑟𝑠(𝑡) = 𝜚
𝑟𝑠(𝑡) + 𝑐 ∆𝛿𝑟𝑠(𝑡).………..……….(I.35) 𝜚𝑟𝑠(𝑡) = √(𝑋𝑠(𝑡) − 𝑋𝑟)2+ (𝑌𝑠(𝑡) − 𝑌𝑟)2+ (𝑍𝑠(𝑡) − 𝑍𝑟)2 .………(I.36)
23 Dalam hal ini,
𝑅𝑟𝑠(𝑡) : jarak antara satelit GNSS ke receiver 𝜚𝑟𝑠(𝑡) : jarak antara titik pengamatan ke satelit
c : kecepatan cahaya
∆𝛿𝑟𝑠(𝑡) : beda waktu antara gelombang satelit GNSS saat dipancarkan dan saat diterima
( 𝑋(𝑡), 𝑌(𝑡), 𝑍(𝑡) )𝑠 : vektor posisi geosentrik satelit GNSS pada epoch t (𝑋, 𝑌, 𝑍)𝑟 : posisi koordinat receiver dalam sistem ECEF (Earth- Centered, Earth-Fixed)
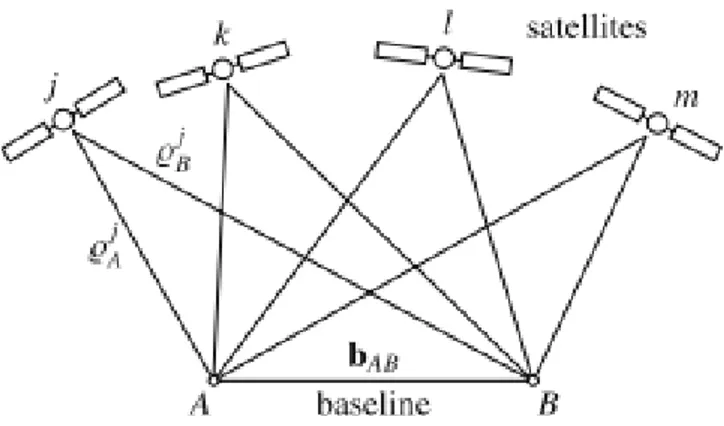
I.8.6.2. Metode penentuan posisi secara relatif. Tujuan dari penentuan posisi secara relatif adalah menentukan suatu titik yang belum diketahui koordinatnya terhadap titik lain yang telah diketahui koordinatnya dan dianggap sebagai titik acuan dengan menggunakan minimal dua buah receiver GNSS yang diamat pada waktu yang bersamaan (Sunantyo, 2000). Penentuan posisi secara relatif dapat diaplikasikan secara statik maupun kinematik dengan menggunakan data pseudoranges atau dengan fase. Hasil penentuan posisi secara relatif ini memiliki ketelitian yang tinggi, karena mengurangkan data yang diamati oleh dua buah receiver GNSS pada waktu yang bersamaan, sehingga beberapa jenis bias dan kesalahan dari data dapat dieliminasi atau direduksi. Penentuan posisi secara relatif dapat menggunakan beberapa metode, yaitu single difference, double difference, dan triple difference.
Gambar I.3. Visualisasi penentuan poisisi relatif statik (Hofmann- Welenhof dkk, 2008)
24 1. Metode penentuan posisi single difference. Data yang digunakan dalam metode ini adalah selisih antara dua data pengamatan one-way. Berdasarkan Gambar I.3, metode ini menggunakan dua buah receiver GNSS (receiver A dan receiver B) dan satu buah satelit (satelit j). Persamaan single difference dapat dirumuskan dengan persamaan (I.37). Ф𝐵𝑗(𝑡) − Ф𝐴𝑗(𝑡) = λ1𝑗 [𝜚𝐵 𝑗 (𝑡) − 𝜚𝐴𝑗(𝑡)] + 𝑁𝐵𝑗 − 𝑁𝐴𝑗 + 𝑓𝑗[𝛿 𝐵(𝑡) − 𝛿𝐴(𝑡)] ... (I.37) Dalam hal ini,
Ф𝐴𝑗(𝑡) : fase (gelombang tidak penuh) receiver GNSS A ke satelit j Ф𝐵𝑗(𝑡) : fase (gelombang tidak penuh) receiver GNSS B ke satelit j λ𝑗 : panjang gelombang satelit j
𝜚𝐴𝑗(𝑡) : jarak antara receiver GNSS A ke satelit j 𝜚𝐵𝑗(𝑡) : jarak antara receiver GNSS B ke satelit j
𝑁𝐴𝑗 : gelombang penuh antara receiver GNSS A ke satelit j 𝑁𝐵𝑗 : gelombang penuh antara receiver GNSS B ke satelit j 𝛿𝐴(𝑡) : waktu tempuh gelombang receiver GNSS A
𝛿𝐵(𝑡) : waktu tempuh gelombang receiver GNSS B
2. Metode penentuan posisi double difference. Data pengamtan yang digunakan dalam pengamatan double difference adalah selisih antara dua buah data pengamatan single difference Berdasarkan Gambar I.3, metode ini menggunakan dua buah receiver GNSS (receiver A dan receiver B) dan dua buah satelit (satelit j dan satelit k). Persamaan double difference dapat dirumuskan dengan persamaan (I.38) dan (I.39).
Ф𝐴𝐵𝑘 (𝑡) − Ф𝐴𝐵𝑗 (𝑡) = 1λ [𝜚𝐴𝐵𝑘 (𝑡) − 𝜚𝐴𝐵𝑗 (𝑡)] + 𝑁𝐴𝐵𝑘 − 𝑁𝐴𝐵
𝑗 ………...…...(I.38) Persamaan (I.38) digunakan untuk sinyal satelit yang memiliki frekuensi sama. Dalam hal ini,
Ф𝐴𝐵𝑗 (𝑡) : data pengamatan single difference pada satelit j Ф𝐴𝐵𝑘 (𝑡) : data pengamatan single difference pada satelit k λ : panjang gelombang satelit j dan satelit k
25 𝜚𝐴𝐵𝑗 (𝑡) : jarak antara receiver GNSS A dan receiver GNSS B ke satelit j
𝜚𝐴𝐵𝑘 (𝑡) : jarak antara receiver GNSS A dan receiver GNSS B ke satelit k
𝑁𝐴𝐵𝑗 : gelombang penuh antara receiver GNSS A dan receiver GNSS B ke satelit j 𝑁𝐴𝐵𝑘 : gelombang penuh antara receiver GNSS A dan receiver GNSS B ke satelit k
Ф𝐴𝐵𝑘 (𝑡) − Ф𝐴𝐵𝑗 (𝑡) = 𝜚𝐴𝐵𝑘 (𝑡) − 𝜚 𝐴𝐵
𝑗 (𝑡) + λ𝑘𝑁
𝐴𝐵𝑘 − λ𝑗𝑁𝐴𝐵.
𝑗 …….……...(I.39) Persamaan (I.39) digunakan untuk sinyal satelit yang memiliki frekuensi tidak sama. Dalam hal ini,
Ф𝐴𝐵𝑗 (𝑡) : data pengamatan single difference pada satelit j Ф𝐴𝐵𝑘 (𝑡) : data pengamatan single difference pada satelit k λ𝑗 : panjang gelombang satelit j
λ𝑘 : panjang gelombang satelit k
𝜚𝐴𝐵𝑗 (𝑡) : jarak antara receiver GNSS A dan receiver GNSS B ke satelit j 𝜚𝐴𝐵𝑘 (𝑡) : jarak antara receiver GNSS A dan receiver GNSS B ke satelit k
𝑁𝐴𝐵𝑗 : gelombang penuh antara receiver GNSS A dan receiver GNSS B ke satelit j 𝑁𝐴𝐵𝑘 : gelombang penuh antara receiver GNSS A dan receiver GNSS B ke satelit k
3. Metode penentuan posisi triple difference. Data pengamtan yang digunakan dalam pengamatan triple difference adalah selisih antara dua buah data pengamatan double difference. Hanya ada satu jenis data pengamtan triple difference, yaitu data pengamat satelit epoch. Persamaan triple difference dapat dirumuskan dengan persamaan (I.40) : Ф𝐴𝐵𝑗𝑘(𝑡2) − Ф𝐴𝐵 𝑗𝑘(𝑡 1) = 1 λ [𝜚𝐴𝐵 𝑗𝑘(𝑡 2) − 𝜚𝐴𝐵 𝑗𝑘(𝑡 1)]………...(I.40) Dalam hal ini,
Ф𝐴𝐵𝑗𝑘(𝑡1) : data pengamatan double difference pada epoch 𝑡1 Ф𝐴𝐵𝑗𝑘(𝑡2) : data pengamatan double difference pada epoch 𝑡2 λ : panjang gelombang satelit j dan satelit k
26 k pada epoch 𝑡1
𝜚𝐴𝐵𝑗𝑘(𝑡2) : jarak antara receiver GNSS A dan receiver GNSS B ke satelit j dan satelit k pada epoch 𝑡2
I.8.6.3. Penempatan titik kontrol. Agar diperoleh jaring kontrol GNSS dengan konfigurasi baseline yang presisi, akurasi, dan handal, antar titik kontrol tidak perlu saling terlihat. Penempatan titik kontrol ini harus tepat, agar dapat digunakan sesuai fungsi dan tujuannya untuk keperluan pengukuran selanjutnya. Beberapa kriteria penempatan lokasi titik kontrol sebagai berikut (Anonim, 2002) :
1. Kondisi dan struktur tanahnya stabil. 2. Mudah dicapai dan ditemukan kembali. 3. Tidak menggangu fasilitas dan utilitas umum.
4. Monumen ditempatkan pada lokasi yang aman sehingga tidak mudah rusak. 5. Penempatan titik harus memperhatikan rencana penggunaan lokasi yang
bersangkutan pada masa yang akan datang.
6. Titik-titik harus dapat diikatkan ke beberapa titik yang telah diketahui koordinatnya dari orde yang lebih tinggi, untuk keperluan perhitungan, pendefinisian datum, serta penjagaan konsistensi dan homogenitas dari datum dan ketelitian titik-titik dalam jaringan.
7. Mempunyai ruang pandang langit yang bebas ke segala arah di atas elevasi 15º. 8. Titik kontrol diusahakan jauh dari objek-objek reflektif yang mudah memantulkan sinyal GPS, untuk meminimalkan atau mencegah terjadinya multipath.
9. Titik kontrol jauh dari objek-objek yang dapat menimbulkan interferensi elektris terhadap penerimaan sinyal GPS.
I.8.7. Sistem Koordinat
Sistem koordinat merupakan sistem yang digunakan untuk menentukan posisi titik atau unsur–unsur geometri yang lain di dalam ruang 2D atau 3D dengan
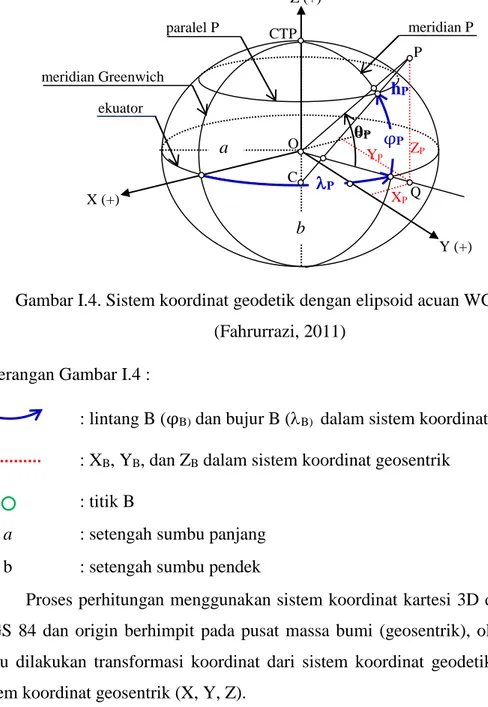
27 menggunakan bilangan yang disebut koordinat, dua buah bilangan untuk ruang 2D dan tiga buah bilangan untuk ruang 3D. Pada penelitian ini koordinat pendekatan didapatkan dari hasil akuisisi data menggunakan GPS navigasi dan koordinat pengukuran didapatkan dari hasil akuisisi data menggunakan receiver GNSS. Kedua alat tersebut menghasilkan koordinat dalam sistem koordinat geodetik. Visualisasi sistem koordinat geodetik dengan elipsoid acuan WGS 1984 disajikan dalam Gambar I.3 sebagai berikut :
Gambar I.4. Sistem koordinat geodetik dengan elipsoid acuan WGS 1984 (Fahrurrazi, 2011)
Keterangan Gambar I.4 :
: lintang B (φB) dan bujur B (B) dalam sistem koordinat geodetik : XB, YB, dan ZB dalam sistem koordinat geosentrik
: titik B
a : setengah sumbu panjang b : setengah sumbu pendek
Proses perhitungan menggunakan sistem koordinat kartesi 3D dengan datum WGS 84 dan origin berhimpit pada pusat massa bumi (geosentrik), oleh karena itu perlu dilakukan transformasi koordinat dari sistem koordinat geodetik (φ, λ, h) ke sistem koordinat geosentrik (X, Y, Z).
C θP hP YP ZP XPQ X (+) Z (+) CTP P Y (+) O a b meridian P paralel P meridian Greenwich ekuator P φP
28 Gambar I.5. Sistem koordinat geosentrik dengan elipsoid acuan WGS 1984
(Ghilani dan Wolf, 2006)
Transformasi sistem koordinat dari sistem koordinat geodetik (φ, λ, h) ke sistem koordinat geosentrik (X, Y, Z), dapat ditentukan menggunakan persamaan (I.41) sampai dengan (I.43) (Ghilani dan Wolf, 2006) :
X = (N + h) cos φ cos ………..……….(I.41) Y = (N + h) cos φ sin ..……….……….(I.42) Z = [N(1 − 𝑒2) + h] sin φ………(I.43) Dalam hal ini,
X : nilai absis dalam sistem koordinat geosentrik Y : nilai ordinat dalam sistem koordinat geosentrik Z : nilai tinggi dalam sistem koordinat geosentrik φ : lintang geodetik
: bujur geodetik h : tinggi di atas elipsoid N : garis normal
𝑒2 : nilai eksentrisitas, dapat ditentukan dengan persamaan (I.44) atau persamaan (I.45) 𝑒2 = 2𝑓 − 𝑓2 ………..(I.44) atau Z (+) Y (+) X (+) XP YP
29 𝑒2 = 𝑎2− 𝑏2
𝑎2 ……….…..(I.45)
Dalam hal ini,
f : nilai penggepengan elipsoid a : sumbu semimajor
b : sumbu semiminor
I.8.8. Elips Kesalahan Absolut
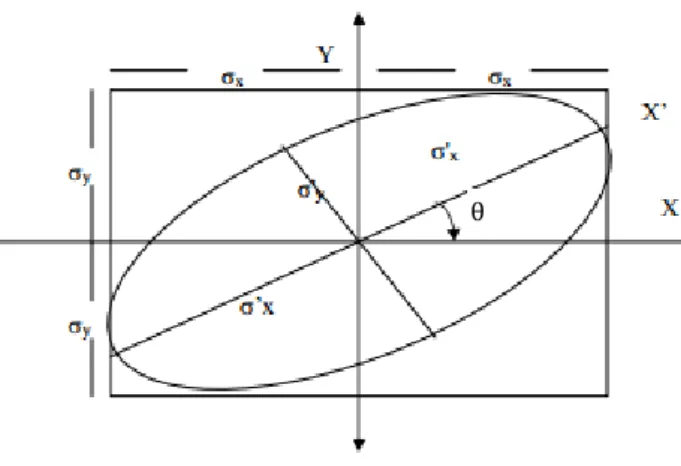
Setelah melakukan proses hitung perataan kuadrat terkecil, menghasilkan standar deviasi dari koordinat titik kontrol yang merepresentasikan kepresisian posisi titik pada sumbu X dan sumbu Y dalam jaring. Standar deviasi menyajikan nilai estimasi kesalahan pada arah sumbu referensi. Elips kesalahan absolut disebut juga sebagai elips kesalahan titik. Elips ini menggambarkan daerah kepercayaan dari ketelitian koordinat suatu titik kontrol. Bentuk dan ukuran elips kesalahan absolut dihitung berdasarkan matriks varian-kovarian dari koordinat titik kontrol yang bersangkutan. Elips kesalahan absolut divisualisasikan pada Gambar I.7.
Gambar I.6. Elips kesalahan absolut Keterangan Gambar I.6 :
X : sumbu horizontal Y : sumbu vertikal
σx : setengah sumbu panjang elips kesalahan absolut σx : setengah sumbu pendek elips kesalahan absolut
30 X′ : sumbu horizontal setelah mengalami rotasi
Y′ : sumbu vertikal setelah mengalami rotasi
σx′ : setengah sumbu panjang elips kesalahan setelah mengalami rotasi σy′ : setengah sumbu pendek elips kesalahan setelah mengalami rotasi θ : sudut rotasi
Model matematis untuk menggambarkan elips kesalahan absolut dapat dituliskan dalam persamaan (I.46) (Mikhail, 1981) :
[X′ Y′] = [ cosφ sinφ −sinφ cosφ] [ X Y]………..………….…….………(I.46)
Matriks varian-kovarian dari [X
Y] dan [X′Y′] seperti pada persamaan (I.47) : [σx 2 σ xy σxy σy2 ] dan [σx ′ 2 0 0 σy′ 2 ]………..………(I.47) Berdasarkan hukum perambatan kesalahan varian-kovarian, diperoleh persamaan (I.48) : [σx ′ 2 0 0 σy′ 2] = [ cosφ sinφ −sinφ cosφ] [ σx2 σ xy σxy σy2] [ cosφ −sinφ
sinφ cosφ]…………..(I.48) Perkalian matriks pada persamaan (I.48), sehingga menghasilkan persamaan (I.49) s.d. (I.51) :
σx′ 2 = σx2cos2φ + 2σxysin φ cos φ +σy2sin2φ…….……..………….(I.49) σy′ 2 = σx2sin2φ - 2σxysin φ cos φ +σy2cos2φ………….……..…….(I.50) 0 = (σy2- σ
x2) sin φ cos φ + σxy (cos2φ - sin2φ)………...(I.51) Dengan melakukan substitusi sin 𝜑 𝑐𝑜𝑠 𝜑 = 1
2 sin 2𝜑 dan 𝑐𝑜𝑠 2𝜑 = 𝑐𝑜𝑠2𝜑 𝑠𝑖𝑛2𝜑, maka dapat ditentukan sudut orientasi elips kesalahan absolut dengan persamaan (I.52) :
tan 2φ = 2σxy
31 Dalam hal ini,
Kuadran dari 2θ ditentukan dengan menentukan tanda–tanda pembilang 2σxy dan penyebut σx2 - σy2. Dengan menghilangkan θ dari persamaan (I.49) dan (I.50) dihasilkan persamaan (I.53) dan (I.54).
σx′ 2 = σx2+ σy2 2 + [ (σx2 − σy2)2 4 +
σ
xy 2 ] 1 2 ……….…………(I.53) σy′ 2 = σx2+ σy2 2 - [ (σx2 − σy2)2 4 +σ
xy 2 ] 1 2 ……….…………(I.54) Dalam hal ini,[X′
Y′] : matriks varian-kovarian absis dan ordinat rotasi [X
Y] : matriks varian-kovarian absis dan ordinat σx2 : varian absis
σy2 : varian ordinat
σx′ 2 : varian sumbu panjang elips kesalahan σy′ 2 : varian sumbu pendek elips kesalahan σxy : kovarian absis dan ordinat
θ : sudut rotasi
Dalam hal ini σx′ 2 dan σ y
′ 2 adalah sumbu semi-major atau sumbu panjang dan sumbu semi-minor atau sumbu pendek dari elips kesalahan absolut. Simpangan baku 𝜎′𝑥 dan 𝜎′𝑦 adalah setengah sumbu panjang dan setengah sumbu pendek dari elips kesalahan absolut.
I.9. Hipotesis Penelitian
Berdasarkan tinjauan pustaka yang ada, hipotesis dari penelitian ini adalah dengan menggunakan empat buah desain konfigurasi baseline jaring kontrol GNSS orde-3, desain konfigurasi baseline yang paling optimal dari segi presisi memiliki nilai faktor kekuatan jaring paling minimum. Desain konfigurasi baseline yang paling
32 optimal dari segi akurasi memiliki nilai A-Optimality, D-Optimality, E-Optimality, S-Optimality, dan I-Optimality yang paling minimum, dengan range nilai 0 s.d. 7,9. Desain konfigurasi baseline yang paling optimal dari segi kehandalan memiliki nilai redudansi individu dengan range nilai 0,3 s.d. 0,9; nilai kehandalan dalam paling dengan range nilai 0,9 s.d. 2,32; nilai kehandalan luar dengan range nilai 1,4 s.d. 10.