l I
I
II .:I
I1.
t--
;,
' '
.':;i
I ,i:'
"_rr ;
.-!'
. I '. --F.:
-%i_-.__
,ERPUSTAKAAN
iI JAWA TIMUR
'h
€
.n}
.*
:il*F
. .:- t /t
-t,-t '[4
t .* te
=*' i*
i,:4
q
ll
t1//
@
LPPilUniversitrs,ltisten PETRA Surabaya
'i
Pengantar
AI{AIISffi DII{AIIIIS DAI{ GEIIIPA
BenjaninLunantarna
Diterbi&an Atas Kerjasama
t
Oleh: Be4iomin LumontarnoHak Cipta @ 2000 Pda Penulis,
Dilarang memperbanyah *bagian atau seluruh isi buhu ini
dalam bentuh apapun, tanpa izin brtulis furi penulis.
Edisi Pettamo Cetahan Pettuma, 20(N
Cetahan l{edua, 2001 Pencrbit:
I*mbaga Penelitian dan Pengabdian Kepada Masyarakot llnitsersitas Kristen PETRA Surabayo
don Al,lDI Jl.
tu
88-40,Tetp. (02?4) 561881 (Hunting), Fax (0274) 588282 Yogalcarto 55281
Percelaharu- AT{DI OFFSW
Jl.
b
g8-40,Telp. (02?0 561881 (Hunthw), fax (0274) 588282
Yog&araa 55281
Pcrpuctahoan N asional: Katalog Dolam Terbitan LUMANTARNA Beniamtn
Pengontar arwlisis dinamb dan gempa/knjamin Lumantorrw' 8d.1. Cet.2
-
Yogyakarto: Andi' 2001uiii+ 108 hlm .; 16 r 23 cm.
Ditcrbithan atas herja soma lzmbaga Penelitan dan Pengobdian Kepada Masyarakat Uniuersitas Kristzn Petra Surabaya
ISBN: 979533-664.9
I.
Judul1. AI,IALISilS DIN AIt'IIS
2. GEMPA
DDC'21:624.1762
FIAYffi T.a. zoo
T rATA
PEI|GAIT"ARBuku ini
merupakan perkembangandari diktat kuliah
da- sar-dasar PerencanaanBangunal
Tanah Gempa yangdibirikan pada Fakuitas Teknik Jurusan Sipil
UniversitasKristen
Petra sejaktahun
1980.Materi
dari buku ini
dibagi menjadi dua bagian besar, yaitu AnalisisStruktur
Secara Dinamis dan Dasar-dasar PerencanaanBangunan Terhadap
Gempa.Bagian Pertama,
membicarakan dasar-dasar perhitunganstruktur
dengan pembebanan dinamisbaik
secaraeksak maupun
dengancara
pendekatan. Bagian Kedua membicarakan dasar-dasar perencernaan bangunan ter- hadap gempa dengan perhitungan secara dinamis.Buku ini diharapkan dapat menjadi batu loncatan untuk
mempeiajarianalisis dinamis maupun
perencErnaan bangunan terhadap gempa secara lebih mendalam.Surabaya,
April
1999 Benjamin LumantarnaDAI'TAR ISI
KATA PENGANTAR DATTAR ISI
BAGIN{ PERTAMA
AT{ALISIS STRUKTUR SECARA DINAMIS 1.1 Pendahuluan
1.2 Idealisasi
Struktur
Dengan Massa Dan per 1.3Struktur
Elastis Dengan Derajat Kebebasan Satu1.3.1 Integrasi dengan Cara Numerik
1.3.2
Contoh Perhitungan dan Soal-soal l"atihan1.3.3
Cara Numerik Lain1.3.3.I Cara Percepatan dan Kecepatan Linier 1.3.3.2 Cara p dari New Mark
1.4
Struktur
Elastis Dengan Derajat Kebebasan Banyak 1.4.I
Contoh Perhitungan1.5 StruktuyElastoplastis Dengan Derajat Kebebasan Satu 1.5.
1
Contoh Perhitungan1.6 Penyelesaian Analitis
Struktur
Elastis Tanpa Damping Dengan Derajat Kebebasan Satu1.6.1
Getaran Bebas1.6.1.1 Naturai Period 1.6. 1.2 Natural Frequency
1.6.2
Getaran Tak Bebas L.6.2.1 Beban Impuls'
L.6.2.2 Beban Sebarang1.6.3
Faktor Beban Dinamis 1.6.3. 1 Contoh Perhitunganiii
v
I I
2 3 4 8 L2 L2 13 L4 16 20
2l
23 24 25 26 26 27 28 29 30
vr Pengantar Analisis Dinamis dan Gempa
1.6.4 Gerakan pada Pondasi
1..7 Penyelesaian Analitis
Struktur
Elastis Dengan Damping Dengan Derajat Kebebasan Satu1.7.1 Getaran Bebas dengan Damping 1.7.1.1 Dua Akar Nyata, P
t I
1.7.1.2
DuaAkarlmajiner,9 . t
1.7.L.3 Satu
Akar
Nyata, p = 11.7 .7.4 Karakteristik
Struktur
dengan Damping1.7.2
Getatan Tak Bebas dengan Damping1.7.3 Getaran Tak Bebas dengan Beban Harmonis 1.8 Penyelesaian Analitis
Struktur
Dengan DerajatKebebasan Banyak
1.8.1 Getaran Bebas
Struktur
dengan Derajat Kebebasan Dua1.8.2 Getaran Bebas
Struktur
dengan Derajat Kebebasan Banyak1.8.3 Natural Frequency dan Mode Shape 1.8.3.1 Cara Holzer
1.8.3.2 Cara Jacobi
1.8.4 Sifat Orthogonal Mode Shape 1.8.5 Persamaan Modal
1.8.6
Struktur
Berderajat Kebebasan Banyak dengan Damping1.8.7 Gerakan pada Pondasi BAGIAI{ ITEDUA
DASAR PERTNCAT{AAN BAI{GI'NAN TERIIADAP GEUPA 2.1 Pendahuluan
2.1.1 Stmktur
Bumi dan Daerah Gempa2.1.2
Istilah-istilah yang Banyak Digunakan 2.L.2.1 Seismograph2.1.2.2 Seismogram
2.1.2.3 Focus atau Hypocenter dan Epicenter
2.1.3
Mekanisme Te{adinya Gempa2.1.4
Ukuran Gempa 2.1.4.1 Magnitude 2.1.4.2 Energr2.t.4.3Intensity
2.2 Perencanaan2.2.1 Response Spectrum 2.2.2 Modal Analysis
37 38 40 47
4t
43 43 45 45 50 50 54 55 55 62 64 66 68 69 7L
7l
72 73 73 73 76 76 78 79 79 80 81 83 93
Daftar Isi
vlt
2.3flat-Hal
Yang Harus Diperhatikan Daram perencanaan DATTAR PUSTAKAAPPEI$DIXS IITDEKS
'99
94 101 105BAGIAN PERTAMA
N{ALISIS STRUKTI'R SECARA DINAMIS
l.l
PENDATIT'LUAIIDalam
bagranini akan dibahas
dasar-dasaranalisis
dan perencanaarlstruktur terhadap beban dinamis, yaitu
suatu beban yang berubah-ubah sesuai dengan waktu.Meskipun sebagian besar dari bangunan sipil dapat direnca-
nakan
denganbaik
dengan memakai anggapanbahwa
beban yangdipikul
adalah suatu beban statis, nzunun ada beberapa haldi manh perhitungan
secarastatis tidak dapat
dipergunakan.Misainya:
Pembebanan akibat getaran mesin;
Pembebanan
akibat
beban bergerak, seperti beban yang ter-jadi
akibat beban kendaraan yang bergerak pada jembatan;Pembebanan impak, seperti akibat ledakan; dan Pembebanan akibat tedadinya gempa.
Sebenarnya
tidak
ada satu bebanpun yangdat'at
dikatakanstatis,
kecualiberat
sendiri. Namun demikianjelas
bahwa bila perubahan bebancukup
kecil (perlahan-lahan), maka efek dina-mis tidak akan terjadi.
Dengan demikian beban tersebut dapat dianggap sebagai bebanstatis.
Sepertiakan
dibicarakan lebihlanjut
dalam bagianlain buku ini,
ternyata bahwawaktu
getar(natural perioQ dari
bangunanadalah suatu
parameter yang sangat penting. Besar atau kecilnya suatu perubahan pembeba- nan harus dibandingkan denganwaktu
getaruntuk
menentukan apakahsuatu
pembebanan bersifat dinarnisatau statis.
Wa}<tu a.b.
c.
d.
Pengantar Analisis Dinamis dan Gempa
getar secara sederhana dapat didefinisikan sebagai
waktu
yangdibutuhkan
oleh suatu bangunanuntuk
melakukansatu
siklus getararr.Pembahasan analisis dinamis
dimulai
dengan idealisasi daristruktur
yang kemudiandilanjutkan
dengan pembahasar penye- lesaian dengan menggunakan caranumerik
(numerical analysi$.Hal ini dilakukan
karena pada umumnyatidak
adasatu
beban dinamispun
yang dapat dinyatakan dalamsuatu bentuk
mate- matis yang sederhana sehingga dapat diselesaikan secara eksak.Penyelesaian dengan cara
numerik ini
dibahasterlebih
dahulu agar pembacatidak
tenggelam dalamrumus-rumus
matematika sehingga kehilangan pengertian frsik dari persoalan yang dihada- pi. Dengan demikian pembaca diharapkan akan dapat merasakanarti fisik dari
bermacam-macarn pembebanandan
merasakan perbedaan antara arralisis statis dan dinamis sedini mungkin se- belum menggumuli penyelesaian eksak yang lebih sulit.1.2
IDE.ITLISASI STRUKTTIR DENGAI{ MASSA DAN PERPada umumnya
struktur-struktur
yangakan ditinjau
selalu dapat diidealisasikan sebagai hubungan massa danper
sebagai- mana dapatdilihat
dalam Gambar 1. Gambarl.a
menunjukkan suatu massa M yang diletakkandi
atas suatu balok yang terletakdi
atasdua buah
perletakan dan dibebani dengansuatu
bebandinamis F(t). Struktur ini dapat
diidealisasikan scbagai suatu sistem massa dan per yang mempunyai massa sebesar M [kg] dan konstanta per sebesark
[N/m] dengan beban F(t] [N]. Garnbarl.b menur{ukkan suatu portal yang juga diidealisasikan
dengan massa dan per.r t.l
(a)
(i)Ganbrr
L.Idalissi
massa danper ,tLT,Jqtfu,_& l-r
H*
*1,_
Konstanta perk
dicari dari kekakuanstruktur
yang bersang- kutan,yaitu
dengan mencari besar gaya yangdibuiuhfan untuk
menyebabkan pergeseran (dellectiorl sebesarsatu satuan. cara
mencari konstantaper ini akan
dibicarakanlebih lanjut
dalam bagian lain buku ini.cara
idealisasistruktur
dengan massadan per ini tidak
dapat dipakai bila massa strulntur yangditinjau
terb-agi rata padaseluruh struktur. untuk
mempelajarianatisis ainimis untuk strulrtur
dengan massa yang merata, pembaca disarankanuntuk
mempelajari referenbi pada daftar pustaka [1, 2, 3].1.3 STRI'I(TUR
EL/ISrIS
DENGAIIDIRA'AT
XEBEBASAIY SIATUstruktur
dengan derajat kebebasansatu
(srngy'e Degreeof
Freedom sJrtem, sDoF) adalah suatu
struktur y"ng trnya
dapat bergerak dalam satu arah sehingga kedudukan-dari-sistem terse-but
dapat ditentukan dengan menggunakan satu koordinat. Ke-ldaan ini ditunjukkan
dalam Gambar 2di
mana massa M hanya dapat bergerak datam arah vertikal (sumbu y).Itt l rl
ll 1,,,,
(b)
1,,
lto
?
(a) (c)
Glnblr 2.
Sflrttktur elastis dengan der4iat kebebasan satuFengantar Analisis Dinamis dan Gempa
Persamaan
gerak
(yang merupakan. persamaan diferensial)dari sistem ini dapat dicari
dengan menggunakan persamaan keseimbangan gaya sebagai berikut (gambar 26):F(t)-ky=My
(1)Dalam persamaan di atas dua
titik
di atasy
menyatakantu-
runan kedua da;ry,
atau dalam halini
adalah percepatan massa M dalam arah y.Cara
lain untuk
mendapatkan persarnaan1 di atas
ialah dengan menggunakanprinsip
D'Alembertuntuk
keseimbangandinamis
{DynamicEquilibriuml.
Dalamprinsip ini pada
suatu massa yang bergerak diberikan suatu gaya imajiner yang berupa gaya inersia (inertiaforcd
sebesarM y
dalam arah yang berla- wanan denganarah
gerak. Problema tersebutkemudian
dapat dipandang sebagaisuatu
problemastatis
(Gambar 2.c). Dengandemikian akan diperoleh persamaan gerak sistem
tersebut sebagai:r(t)-t<'y-Mji=o
12)Jelas bahwa persamaan 2 sama dengan persanaan 1.
Persamaan gerak
I
dan2
yarrtg merupakan persamaan dife- rensial, dalam haf-hal tertentu dapat diselesaikan secara anaiitis.Namun demikian pada umumnya harus diselesaikan secara nu- merik, yaitu dengan menggunakan integrasi dengan cara numerik (Numerical Integration).
Berikut ini akan
dibahas penyelesaian persamaan diferensial dengan integrasi dengan cara, numerik.1.3.1
Integrasi
dengan Cara IitumerlLAda
bermacam-macamcara yang dapat digunakan
dalam cara numerikini.
Secara umum penyelesaian dengan cara nume-rik
menyelesaikan persamaan diferensial setapakdemi
setapak (stepby s/ep dimulai dari waktu t =
Odi
mana keadaan awal(Initial
Condition$, perpindahan tempat dan percepatan biasanyadiketahui.
Dalam caraini kurun
walrtu yangakan
diselesaikandibagi-bagi dalam suatu interval waktu tertentu,
6t, untuk
kemudian diselesaikan secarabertumt-turut dari
satuwaktu
ke walrtu berikutnya. Untuk bergerak dari waktu ke waktuini
dapat digunakan bermacam-macam anggapan. Dalam bagianini
akan dibahas suatu cara yang sangat sederhana,yaitu
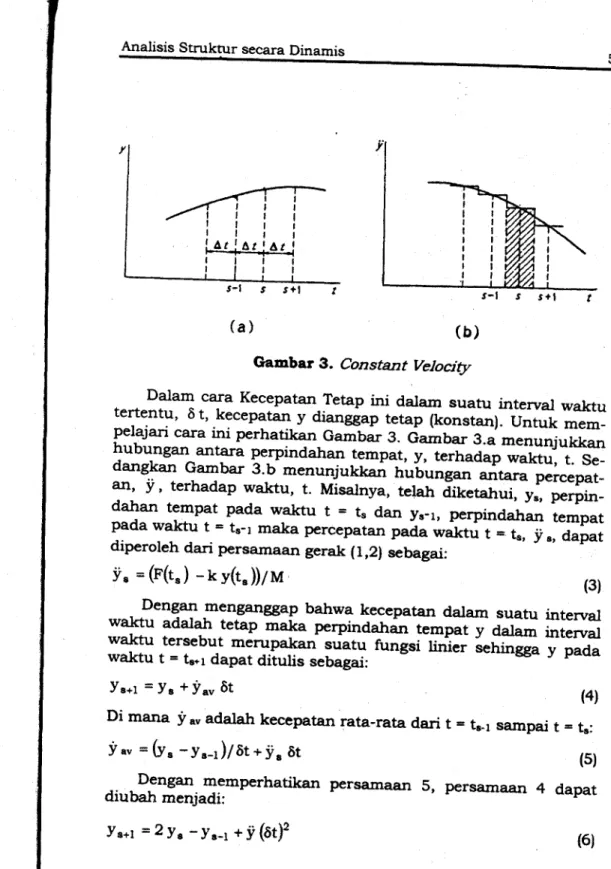
cara Kecepatan Tetap (Constaat Velocityl.Analisis Struktur secara Dinamis
.f-l 5 S+t
(a) (b)
Gambar
3.
Constant VelocityDalam cara Kecepatan Tetap
ini
dalam suatu interval waktutertentu,
6t,
kecepatany
dianggap tetap (konstan).U"iut
mem_pelajari cara
ini
perhatikanG;b;
3. Gambar 3.a menunjukkan hubungan antara perpindahan-tempat,
y,
terhadapwaktu, t.
Se_dangkan Gambar
3.b
menunjukr<anhlb;d;;;;';.rcepat_
an,
y,
terhadapwaktu, t.
Misalnya,telah Ot *t
"l, yl,
p.rpirr_dahan tempat pada
waktu t =
tsdan
ys_r, perpindahan tempat pada walrtut
= ts-r maka percepatanp"a" *.f*" ,
=,"
Sr", dapat diperoleh dari persamaan gerak (1,2) sebagai:
y" =(p(t") -rv(t"))lrra
(3).
Dengan menganggap bahwa kecepatan dalam suatu intervalwalrtu
adal1h tetapmala
perpindahan tempaty
dalam intervarwaktu
tersebut merupakansuatu fungsi rini"r l"hi"a; y
pada waktut
= tc+r dapatditulis
sebagai:Ys+l =
y"
+y", 6t g)
Di mana
y.,
adalah kecepatan rata-rata darit
= te-r s4rlpait
= t":y.,
=(I" -y"-r)7at+y" ot
(s)..
.r."r*"r,
memperhatikan persamaanS,
persamaan4
dapat diubah menjadi:Ie+r =
2y" -Ir-r
+y(Ot), (6)Persamaan
6 bcrarti bila perpindatran tempat pada
dua waktu yang benrrutan, yaitu pada wakhr 1-
tc, Y", dan waktut
= 1"-1,y*i,
d1ghdiketahui,
perpindatran tempat yang berikutnya,*aktu t
= L*r juga daPat dicari.Dengan demikian perpindatran terrpat dari sistem yang
ditin-
iaudapit
dicari setapak demi setapak dengan menggunakan per--""*""r,
6 bila perpindahan tempat awal (initial displacemen4 dan satu perpjndahan tempat yang berikutnya telatr diketahui'
Dua cara
untuk
mendapatkan dua perpindahan tempat yang pertama akan dibahas berikutini.
Pada cara yang pertama, pada saatt
= 16, keadaan awal dapatditulis
sebagai berikut:Yo-0
yo=0 l7l
jio
=F(o)lM
Karena percepatan dianggap tetap dalam satu intenral, maka:
yr
= 0.5ji" (at)'
(8)Dalam cara yang kedua, percepatan dianggap bembah secara
linier
sampai at<trir dari interval yang pertama. Dengan demikianbila
percepatanawal yoadalah nol, yrdapat
diperoleh sebagaiberikut
(Lihat Gambar 4):!i fl
Giaabar 4z Keadaan awal
i--""
dr
iAnalisis Struktur secara Dinamis
Dari
t
= t6 sampai dengant
=tl, iift)= ii,(tlot)
Sedangkan:
y(t) = 115i(t)at
at
jir
=F(t)/nr
T =2n(naTrcp
Penurunan
rumus
tersebutdiatas
akan dibicarakan bagran lain buku ini.Ketelitian cara anarisis numerik sangat tergantung dari peng-
ambilan interval 6t. semakin kecil inierval v"rrg dpiur,
-akan semakinteliti
hasil perhitungannya. pemilihan besar intervalini dapat dilakukan denga, cara
mencoba-cobasampai
akhirnya didapatJ<anhasilyang optimum. Biggs[l]
menganjurkanuntuk
memakaiintervat
6t sebesar sepersepulutr aarinatural
period., T, dari sistem yang ditinjau.Natural period, T,
dari
suatu sistem dengan derajat kebebas- an satu dapat dihitung sebagai berikut:l ''
(e)
(10) Dengan mempergunakan batas-batas integrasi 0
dan 6t
dan memperhatikan persamaang,
persamaan 10 dapat diselesaikan sebagai:Yt =L/6ji, (ot),
(11)Perhatikan bahwa persamaan 11 ini memerlukan
iterasi karenaf
, tergantung pada yr (persamaan 3).-
Biggs[U penganggapbila
beban dinamis yang diberikan F(t]adalah nol pada
keadaanawal, cara kedua nalus
digunakan karena percepatan awaly6
adalah nol sehingga yr juga nol. Teta_pi
bilakita
perhatikan bahwa intervalwaktu 6t
yang diperguna-kan tentunya cukup kecil maka'kesalahan y*g it"r,
terjadi dengan menganggap yr adalah nol tidaklah terlalu 6erarti. Oenian T-g.uTe".B$ VanS sama, iterasi dalam persamaan tI juga dalat
dihindari bila:lt2l
(13) dalam
MILIE
Badan PerPusnlaan
1.3.2 Contoh Perhltungan dan Soal-sod
Latlhan
Untuk mendalami lebih
lanjut
cara perhitungan numerikini,
akan dibahas suatu sistem elastis dengan derajat kebebasan satu yang mempunyai massa sebesar2
kg dan kekakuan per sebesar 20O0N/m
seperti terlihat dalam Gambar 5.a yang dibebani deng-an
beban dinamis F(t) sepertiterlihat
dalam Gambar 5.b. Beban tersebut diberikan dari keadaan tidak bergerak.(a) (b)
Gambar
6.
ContohNatural period sistem tersebut dapat diperoleh dari
rumus
13 sebesar0.198 detik
sehinggainterval waktu
5tdipilih
sebesar0,02 detik.
Karena sistem dalam keadaanawal tidak
bergerak makauntuk t -
0,0 detik,y = 0,0 m dan untuk t =
0,02 detik (interval pertama),y
dapat dicari darirumus 8
sebesar 0,005 m.Selanjutnya dapat dicari percepatan pada
waktu t =
0,02 detik,jir, dd rumus 3.
Setelah y, dicari maka perhitungan dapat di-lanjutkan untuk
langkah berikutnya,yaitu untuk t
= 0,04 detik.Perpindahan
tempat untuk t = 0,04 detik, yz, dapat
dihitung denganrumus 6,
kemudiandicari y2
Selanjutnya perhitungandapat dilakukan
setapak demi setapak sampaiwaktu yang
di- kehendaki. Penyelesaian soalini
sampait = 0,34 detik
ditun-jukkan
dalamTabel 1 yang
secara grafrsdapat dilihat
dalam Gambar6.
Suatu program komputer sederhanauntuk
menyele- saikan soalini
dapat dilihat dalam Apendiks I.,, det
Analisis Stfuktur secara Dinamis
e.r O,Z
0.3,, det
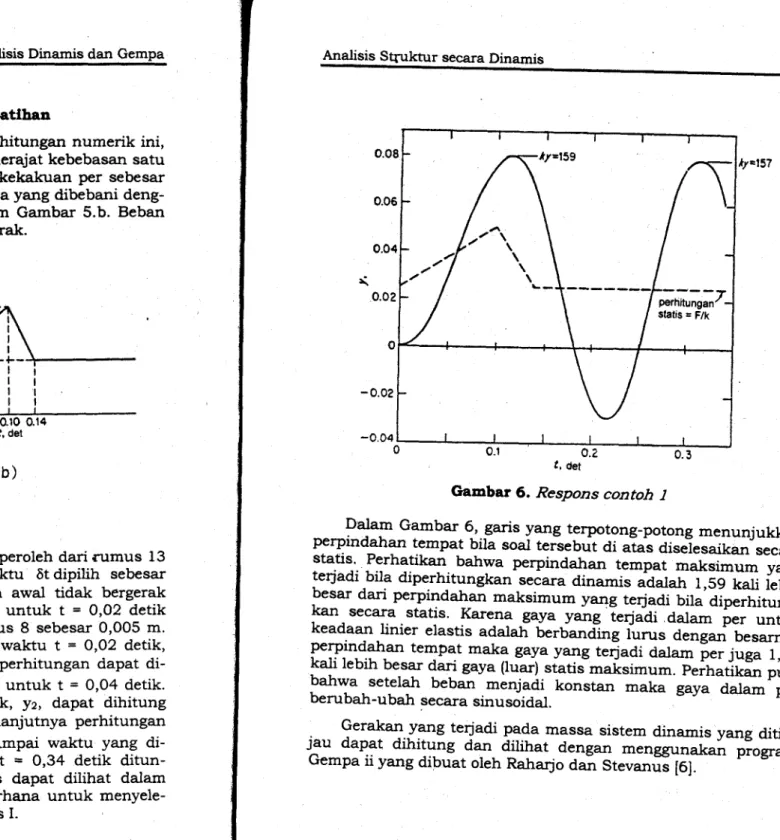
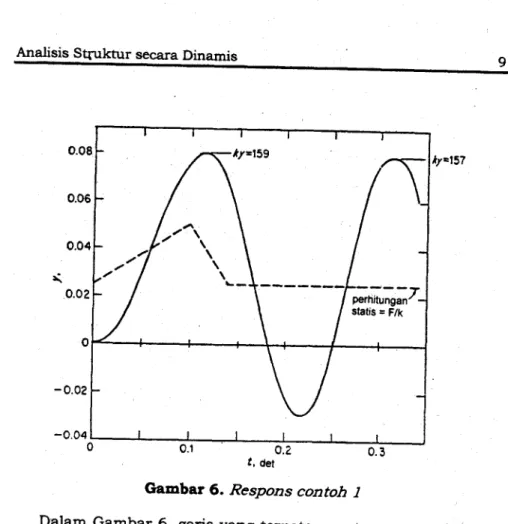
Gambar 6. Respons contoh
l
Dalam Gambar.
9,..gd"
yang terpotong_potong menunjukkanTroinqa6*
tempat bila soarterlebut di aLs aiseiesaita'
secarastatis.
Perhatikan bahwa perpindahan tempat maksimum yang terjadi bila diperhitungkan seca.a dinamis adaiahr,s9 kali
lebih besar dari perpindahan maksimum yang terjadi bila diperhitung_kan
secarastatis. I*"-"1
-g1yay;g iegaai.dalam i", ,rrrt t
keadaan
tinier
elastis adalahueruanalg r"*" a;G^J;.sarnya
ge-ry-ilaahan tempat
-"k1
gaya yang terjadi dalam[er iuga
i,SO kali lebih besar dari gaya ltuar)siatistaksimum. reinatitan
puta bahwa setelah bebanmenladi konstan maka
gayadalam
per berubah-ubah secara sinusoiaa-I..
Gerakan yang terjadi g3da massa sistem dinamis yang ditin_jau dapat dihitung dT- {li}"t
dengan menggunakan program Gempa ii yang dibuat oteh Raharjoaai Stevanri
[01.perhitungan slatis = F/k
10 Pengantar Analisis Dinamis dan Gempa
\o o
,
ts li
>r
aRiE EHEEs sEE:E EEE
Sqqe qqqqq :::q(.
o;dod dodcjcj 9?god dcict
N
:>r
33geE :EEge 3sEE3 BB
cjoog? q999d dddcjg 99
t-
o,
tr LrX
ooooQ qqqq! qqqa'1
sKsls qqq;N S$3*$
qd?o(f) \fto
tt>')
o o o
oooo 16++99,^ Q99o-
torrl.;Ri6 p$es"i $$T:; sR
s
Ot'.rOrOn
lOl.f)c)olNC.l lorotolJ.)|o lolJ) N C-{ e.l e-l e{ C-{ 6I
toolr)oto
6r(Y)(Y)++
ooo
+J
aNt@O Oe{+rroO Oe.{+\99Q a!lt Yd666 =;;;; clc{oIe{e.t
tocotf)o;-;- ooocici ciocicro ooo
ooi a
I
.o{)
F
({Anaiisis Stmktur secara Dinamis
Soal-sod
Iatthan
1.
Sistem elastis dengan derajat kebebasan satu seperti Gambar 7.a dibebani dengan bermacam-macarn beban seperti terlihat dalam Gambar 7.b sampai dengan 7.e. Carilah gerakan (resl ponse) sistem tersebut dengan menggunakancafa
numerikuntuk
bermacam-macarn variasidari t /T: O,l,
0,2S, O,S, 1,0dan 2,0, dan
6t/T
sebesar 0,1 dan 0,2.11
f O0O k9,/trt
*n, (b) 'oo\0",
(c) tr
(e) tr
Ganbar
7.Untuk
sistem elastis seperti soalI
tersebut gunakanlah ber- macam-macam carauntuk
mencari perpindatran tempat un-tuk
interval yang pertamd, yr, kemudian bandingkanlah deng- an hasil yang didapatkan dalam soal 1.Suatu sistem elastis dengan derajat kebebasan satu diketahui mempunyai
natural
period sebesarI
detik. Bilauntuk
pem- bebanan sepertiterlihat
daiam Gambar T.c.didapatkan per- pindahan tempat statis maksimum sebesar2
cm, tulislah per- sarnaan gerak sistem tersebut dan kemudian carilah gerakan sistem tersebut dengan menggunakan cara numerik.(d) tr
F(t'l
/r
3.
t2 Pengantar Analisis Dinamis dan Gempa
1.3.3 Cara
Nunerlk Laln
Cara kecepatan konstan yang telah dibahas
di
atas merupa-kan cara
sederhana yangdapat
memberikanhasil yang
cukupbaik
dengan memakaiinterval waktu yang cukup kecil.
Selaincara
kecepatankonstan tersebut masih terdapat banyak
caranumerik lain [1, 3, 7, 8]
yang dapat dipakai,antara lain:
Cara percepatan dan kecepatan linier dan cara p Newmark.1.3.3.1 Cara Percepatan dan Kecepatan
Llnler
Pada umumnya
bila
percepatan dianggaplinier
maka kece-patan akan
dianggapkuadratis (Lihat cara
percepatanlinier
dalam Daftar Pustaka, 1 dan 8). Dalam caraini
17, 81, meskipunpercepatan dianggap sebagai sesuatu yang
linier,
kecepatan juga tetap dianggaplinier,
sehingga hubungan antara percepatan dan kecepatandengan perpindahan tempat dalam suatu
intervaldapat diturunkan
sebagaiberikut.
Perhatikan Gambar8
yangdapat
dianggap sebagai grafrkdari fungsi
percepatan maupun kecepatan terhadapwaktu.
Kecepatan padawaktu tz, Yz,
dapat diperolehdari
kecepatan padawaktu tr,
Yr, dan
percepatanpada intenral waktu tersebut sebagai:
jjz
=!tt+lydt
(14)Bila percepatan dalam interval waktu 6t dianggap
linier
maka integrasi dalam persamaan 14di
atas, yang merupakanluas di bawatr fungsi yang diintegrasikan, dapat diganti
dengan(i,z + 9r
\ tt
1Z sehingga persamaan 14 dapat diganti meqiadi:i'z =2(itt -f ,)/6t- ji,
Dengan menganggap bahwa kecepatan dalam interval waktu 6t linier, maka dengan cara yang sama akan diperoleh:'
i'z =2(lz -vr)/6t-ir ''
(16)Dengan menggunakan persamaan
15 dan 16,
persamaan gerak (2)untuk t
= t2 menghasilkan:(+r"r(a0'*t)v,
=+u7(ot)2y, +2Ml(6t)y, *My, +F(tr)
Persamaan 17 menunjukkan bahwa y2
atau
Yn dapat diper- oleh bila data sebelumnya yt atau yn-r diketahui.(1s)
(L7l
Analisis Stmkhrr slecara Dinamis
Cara
ini
dalam beberapa kasus tetah dibulrtikan memberikan hasil yang sangat baik [7, 81.Gambar 8. Percepatan dan kecepatan
linier
1.3.3.2 Cara0 dari
l{ewmarkCara yang dikembangkan oleh Newmark [1, 3, 8]
ini
dapat di- tuiiskan sebagai berikut:y z =
yt
+ 6t$,
+9,)
lZaarryz =yt
+6ty1+(o.S-g)ji,
(ot)2 + gg,rz(at)2Dalam persamaan di atas,
p
merupakan suatu variabel yang menyatakan variasidari
percepatan dalam suatu interval walrtu.Newmark, daiam penelitian yarlg telah dilakukannya [3], menyim-
pulkan
bahwa hasil yang terbaik dapat dicapai dengan memakaip antara 1/6
sampai dengan\/a
daninternal walrtu
6tantara1/6
sampaidengan 1/5 dari Natural
Periodyang
terpendek.Penyelidikan
lebih lanjut menunjukkan bahwa p
sebesarI/6
merupakan cara percepatan
linier
(dan kecepatan kuadratis) [3].l3
(18).
I
t4 Pengantar Analisis Dinamis dan Gempa
1.4 Sf,RT'KTI'R ELITS}TIS DENGAI{ DERAJAT KEBEBASAN BAITYAK
Setelah mempelajari
stmktur
elastis dengan derajat kebebas- an satu,struktur
elastis dengan der4jat kebebasan banyak(Multi
Degree of Freedom System, MDOF) adalah suatu perluasan yang sederhana.
Untuk
mbmpela.jari halini,
perhatikan suatustruktur
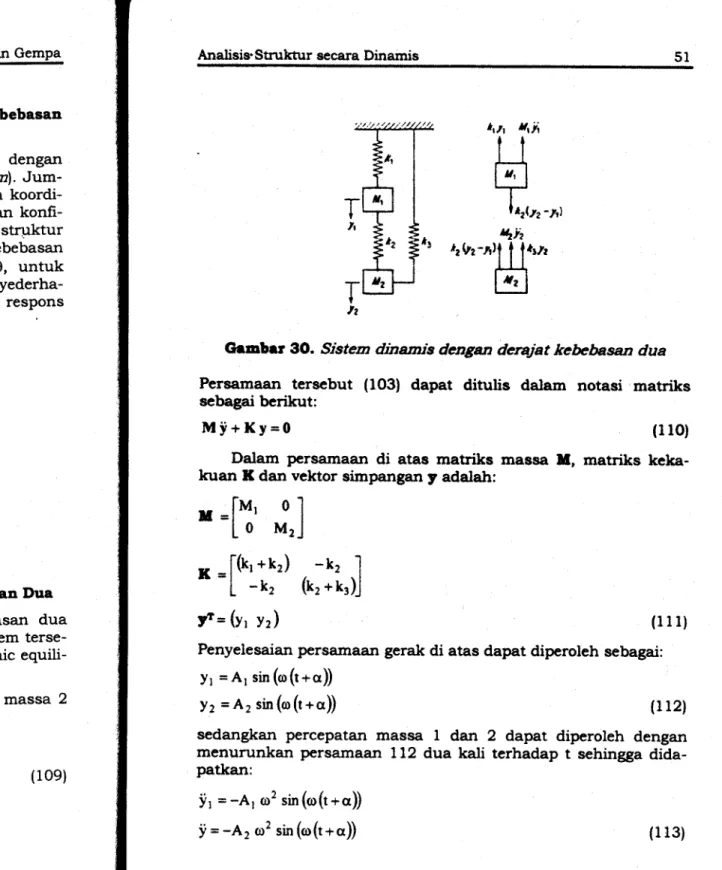
elastis dengan derajat kebebasan dua seperti terlihat dalam Gam- bar 9. Persamaan gerak dari masing-masing massa dapat dengan mudah diperoleh dengan menggunakan cara keseimbangan dina- mis sebagai berikut:nonffn,nu,,
n,
trVz-ntl lurn
tr I f.(tl
G.Eb.r 9, Stulrturelastis dengw deniat kebebasn 2
Mr
iir +kr yr -kr(yz-yr)-F, (t)=9
Mz i, z
+kz $ z-yr)-
Fz (t)= oyang dalam bentuk matriks dapat
ditulis
sebagai berikut:Ui+Ky-F-
0(le)
(20)
F.ltl
Anaiisis Struktur secara Dinamis 15
di mana:
![=
y?=
* =[(k, *kr) -ur1 L -kz kz')
r.
=(F,(t) r, (t)) [M, ol
Io u,]'
(v,
y z),Dalam persamaan'di atas dan selanjutnya,
huruf
yang dite-lalkan
merupakantanda matriks.
Matriks-kekakuan-Kiapat
dicari dengan mudah dengan memakai definisi
dari
angka keka-kuan
(perhatikan Gambar 10). Sepertitelah diketahui
elemen- elemendari matriks kekakuan K, krr, kv,
kzzdan
seterusnya mempunyaiarti
sebagai berikut:kii:
adalah gaya yang diperrukan pada massai untuk
memin- dahkan massai
sebanyaksatu
satuanbila
semua massa yang lain ditahan pada tempatnya masing_masing.kii:
adalah gaya yang diperlukanuntuk
,rrenahan,i"""" j
bilamassa i dipindahkan
sebanyaksatu satuan
sedangkan semua massa yanglain ditahan
pada tempatnya maiing_masing.
r
:kr *ke
lx'
H
H.
kr
kr
z:-kz
kz r =-ka kzz=kz r2lt'l
Genbar lO. Menc*i
matriks ketrakuanK
16
Pengantar Analisis Dinamis dan GempaDengan berpedoman pada definisi
ini
makakrr'
krz dan keka-kuan.kekar.""or"i""vad.apatdicaridenganmudahsepertiterli-
hat dalam Gambar 10.Penyelesaian numerik persamaan
gera\
sistem dengan dera- 5atteUeUa""t U"rty"t
dapat dengan mudahditurunkan
denganmengikuti
"*.
vuiigdid"U"" plda
sistem dengan derajat kebe- basansatu'
'Untukpenjetasanlebihlarrjut,perhatikancontohperhitung-
an di bawah ini.1.4. 1 Contoh Perhituagan Fr(t) = 0
Fz(t) = 2o0 N
Mr=2kg Mz=1kB kr
= 400ON/m
kz = 2000
N/m
Gambar
Lt.
ContohPerhatikan sist-em dinamis dengan derajat kebebasan dua se-
perti yang
terlihat p"a" C"*Uar 1I
Daridlta
yangteriihat
padaGambar S,
p"r""*^u','
geratt d'ari sistem dapatditulis
sebagai:Mi+Ky-r(t)
=o Pl\
Fzltl
Analisis Stnrkarr secara Dinamis
di mana:
atau:
i=-K'y+F'
di mana:
l22l
:1
_
Persamaan 6 yangditurunkan untuk
sistem dinamis dengan derajat kebebasan satujuga berlaku untuk
kedua perpindahan tempat,yr
dan yz Dengan demikian dalam bentuk matriks dapatditulis
sebagai berikut:Ir+r
= 2!. -yr_r +r.
(6t)2 (23l,Periu diperhatikan di sini bahwa:
a.
Karena sistemyang ditinjau
mempunyai derajat kebebasan dua maka periode sistemini
ada dua buah, yang dalam hatini
adalah 0,2 detik dan 0,1 detik, sehingga intervalwaktu 6t
ha- rusdiambil0,1
dari periode yang terkecil, yaitu 0,1*0,1 = O,O1detik. Cara menghitung periode
untuk struktur
elastis d.engan dera,jat kebebasan banyak akan dibicarakan kemudian.b.
Untuk yzr, karena adanya gaya pada M2, dapat dipakai rumus8:
yzi
= 0.5 yro(6t)'
e4)sedangkan
untuk yrr, karena
padawaktu t = 0,
F(to)=
0,maka dapat dipakai rumus:
t7
K =1ooo
l@*z\ -21
L -2 2J
y'=(yr yz)
" =[; :], f, =(O
2OO),rc
=M-r" =[T i],*.[_',
r
=rooo[3
-tl
L-2 2)
trF = M-r
" =r*
[?] eilm
yrr
=jirr
(ot)27o
(25)yang harus
diselesaikan secaraiterasi. Tetapi sekali
lagi aitegaskandi
sini,bila 6t
diambil cukup kecil, meskipun me- makairumus
24,di
manayrr
= 0, makatidak
akan terdapat perbedaan Yang besarDalam v'ariabel Yr dan Yzr di atas index pertama menunjukkan nomor massa. a-an inaex kedua menunjukkan nomor langkah.
Jadi yu
adalah perpindahan massano 1
(Mr) pada langkah pertama,t
= tr.Hasil perhitungan
untuk
contoh soalini ditunjukkan
dalam tabel2, yatg
""c"ia
grafisditunjukkan
datam Gambar12'
Bila GambariZ Eipertratitr,, lebih lanjut
maka akanterlihat
bahwa perpindahan tempatyr
dan yz trerubah-ubah dalam bentuk yang[.ii"ir
Sinr4geffal aengasplrioa" +
O.2 detik,yaitu natural
pe- riod yangper.ta*"
liundamentatpeiod\.
Dengan demikian dapat alsimpuil<ar{ bahwa'mode'i'ang pertama (mode yang berhubunganh""g"tt natural
period yang pertama) memberikan penganrh ter-Lg;
terhadapp"rg"r"t
"t iati
"i"t"to
yangditinjau.
Halini
akart dijelaskan teUitr-taqiut dalam bagran train bukuini'
0.30
0.25
0.20
.0.r 5
\
0.to
o.o5
t, o.t0,.c
tz(fz-rtl.ar'3O3
11 (n).., c J!4
Cranbar L2, Simpangan massa
I
(yil dan massa 2 (yz)Analisis Struktur secara Dinamis 19
€9Fat \O\O6l€c! q=!al,-o\
=\Ot*6tF 6\t o\\o6t€ tr6rh mo\FNF o\Fo\rj6 .i(a Q(IlI_-O 6st*m ci-rui+ a.{an6N6 o-
OOO- -iiiJ jJi:.; ;6Oci6 6o
ooooo ooooo <i<iooo da6a6 6a
t
lgsg 3s3e$:t€eh= =.,Q€\o rh
SqEI 9RHXX RERFR 9iEEE E:
odooo ooooo ooooo ooooo oo
c{
ta
:>N
E=!eE dcidd? gsEEE gEB=E 9"9?9 qg99g EEEEE goocjct I -
:>tC.l
FEEs; g66Sq qf 6EB r-eEs E
:E<) 6l
oRR$E g88SR 3f888 fiB9H-
c',-Gl 6tN6tNN N6ta!ma{ 6t=-
"3=E: gE3:E :::59 E5EgB
\O or88
O\"+
N
?,o
:>
ooooo EEEE egEBs oo??? 3:gEE ggEEE
g999?o ooooo
orh
oesGp sRFST $;Sr$ sssR^
6,?'
oo o
cC)tsrrlq9 h€66th tO\r.i6 O\€o
-6FO orir<f+o oo=hr
^O.rORe
o8
at
ood'!ls RSENA RR:Eg BRr-^ r 6q88 385t9 e=3r= :ex=e 8F
ooooo dcjddd d<iooo cjcjcjdd d;
€g o oll
oe..=
[9ll
*s }H
-!EE*
6A h\-xil ll
>'-+
a*
N .oc)
F
c,Menarik
juga untuk
memperhatikan bahwa gayaper
yangterjJiaJam"pi r;JA
2,67'L<attlebih besar dari gaya yang di- berikan. Gayayangl"qi"ai a"Um
per-2 adalah 1'53kali
lebih be- sar.Dari sini
dapatail-Uif
kesimpulan bahwa gaya yang dlTm- bulkan karenap"*U.UL"tt
yang diueAkarr secara tiba-tiba akani;i; ;bih G""i d;;t;
vaneIe'jadi
bila pembebanan diperhi- tungkan secara statis'1.5 STRT'ITTTIR EI,A$TOPLASTIS DTNGAII DERA"IAT KEBF' BASAI{ SATU
Suatubatrandinamakanmempunyaisifatelastoplastisbila
diagram tegangan-regangan (atau gaya-simpangan) dapat digam-barkan
seperti Cam6"t -13,b' Diagram gayasimp3ttgl"
tersebut menunjukkan bahwa sebelum m"ncapai Rm (disebut batas elas-.ti.s),;;;
b"rsifat u"i"t
"r""1is, .sedangi<an.
selelal *:::T"i
bataselastis,
R-,
Per menjadi plastig aa1ti{a} d"P"t l:lerima
tam-ffi;' g.y"'t"bit
lairjut.- Setelah plastisitas tercapai, gaya yangdiberikan dikurant (aU"n'Ut'
unloading) sehingga.-simpanganakan berku.*g 3""g* sifat linier-elastis. Perhatikan
bahwa meskipun g^yu'y*g iiU"ti5""
telah menjadi nol kembali' narnun masih akan terdap""t"i""
simpangan yat'gtia"t
d39at kembali kenol.
Unloadingini
Japat ditatui<anierus
sampai tercapai batas elastis daiam arat, yat'g berlawanan'-R-'
(a
(cI ' r.'ccrn
,i
Garnbar
Lg. Stutrtur
elastoplastisAnalisis Strukarr secara Dinamis
Perhatikan
struktur
dengan derajat kebebasansatu
denganper yang
mempunyaisifat
elastoplastisseperti terlihat
dalam Gambar 13.a dan b. Bilastmktur
tersebut dibebani dengan gaya dinamis maka persamaan gerakstruktur
tersebut dapatditulis
sebagai:
Mji+R-r(t)=e
lz1ldi mana
untuk
R berlaku batasan-batasan sebagai berikut:,I
i
1
lI {
i
II
I,
II
tit
21
R=ky R=R-
R=R--k(y--y)
untukOcycyer untukycl<y<yn
untuk (l^-2
ycr) <y
< yn (271Dalam
rumus di
atas ycr adalah batas elastis sedangkanR-
adalah gaya yang berhubungan dengan yer. Rumus ketiga dalam persamaan 27 menunjukkan persamaan garis yang menyatakan adanya pengurangan gaya dalamper
setelah tercapainya batas elastis (unloading). Persamaan gerak 26 dapat diselesaikan secErranumerik
dengan memperhatikan batasan-batasandalam
persa- maan 27.Untuk
mendalami lebih l,anjut, perhatikan contoh per- hitungan di bawah ini.1.5.1 Contoh
perhltungau
Misalkan dalam
sistemyang terlihat dalam Gambar
13.0, massa M adalah 2 kg, kekakuan per 2O00kN/m
sedangkan batas elastis,R-,
adalah Il0
N, maka ycr =Ra/k
= 0.055 m dan persa- maan gerak sistem tersebut dapatditulis
sebagai:i
= 0.5 F(t)-
o.s Rdi mana:
0.5R=
10O0y0.5R=55N
0.5R=55-1000(y--y)
(28)
Hasil perhitungan dengan menggunakan cara constant velo- city
ditunjukkan
dalam Tabel 3, sedangkan gerakan massa ditun-jukkan
dalam Gambar 14. Grafrk a menunjukkan respons statis,grafik b menunjukkan
responsdinamis bila per bersifat linier
elastis (tidak ada batas elastis) sedangkan grafrkc
menunjukkan respons dinamis bila per bersifat elastoplastis.untukOcy<0.O55m i
untuk0.055trr<y<yo
untuk
(yE-
O.1 1). y . y.
\22
Pengantar Analisis Dinamis dan GempaYzR= 100q,, or 55
0 0.0050 0.0200 0.0410 0.0616 o.ox82 0.o928 0.1004 0.0960 0.0814 o.0624 0.0466 0.0403 0.0460 0.0615 0.0806 0.0957 0.1007 0.0100
o.0roo
0.0060 -o.oo04 -o.0616 -o.oo20 -0.0070 -0.0120 -0.0102 -0.0044 o.oo32 0.0095 0.0120 0.0098 0.0036 -0.0040 -0.0101 2s.o25.O 15.0 -1.0 -10.0
-5.O -17.5 -30.0 -25.6 -11.O 8.0 23.8 30.
i
24.4 8.9 -to.2 -25.3 o
5.0 20.0
4r.0
55.O s5.0 55.0 55.0 50.6*
36.0*
17.0*
1.2"
-5.1*
0.6*
16.1*
35.2*
50.3*
25 30 35 40 45 50 37.5 25 25 25 25 25 25 25 25 25 25 o
o.a2 0.04 0.06 o:08
o.l0 o.r2
0.14 0.16 0.18 0.20 o.22 0.24 o.26 o.28 0.30 p.32 0.34. Y, R
-
55-
1OOO(0.1004-Y).Perhatikan bahwa dalam melakukan perhitungan- (Tabel 3) selalu
harrs
diperhatikan batas-batas yangaiUella1
dalam per-sarnaan 28.
Milahya
pada saatt
= 0,08detik' 0'5
R telah men-""p"i or,o
N,hal ini tia"r. mungkin
sehinggaultlk- hasa 0'5
Ri.?ii"
dipakai 55 N- Unloadinglada
saatt
=0'16 detik'
terlihat denganturunnya y dari
0,1064 menjadi0,0960'
Dengan demi-kiariuntuk
perumusan 0,5 R berlak-u perumusan ketiga'Perhatikanpulabahwaresponselastismemberikansimpang- an yang tebih kecil tetapi memUeriXln gaya PeJ
yTrg
lebih besara# ,"Ipons
elastoplasiis. Terlihatjygi dari
Gambar 14 bahwa terjadi simpangan tetap sebesal!. -
Yct'Analisis Stnrktur secara Dinamis
Gaabar
14. Contoh3
!
1.6
PEI{Y'ELESAIANN|ALITIS
gTRUKTUR ELASTTS TATPA DAMPING DDNGAN DENA.'AT I(IBEBASAN SA?UPersamaan gerak
dari struktur
elastis dengan der4iat kebe- basan satu telahditurunkan
dalam pasal 1.3 sebagai:P(t)-t y=My
(2e)atau:
Mi;+ky=F(t)
(30)Persamaan 30 merupakan persamaan diferensial tingkat dua.
Penyelesaian umum persamaan 30
terdiri
dari penyelesaian kom- plementer (Complementary Solutionldan
penyelesaianpartikulir
(Particular Solutionl. Penyelesaian komplementer adalah penyele- saian persamaan homogen,yaitu
penyelesaiandi mana
bagiant
"\
?
23
Penyelesaian Elasto plaslis
R. ='110 (c)
.5o07ee'
r.. '.--L--- \ vi
--- !.r-o!3'-
-T---T'----' ,. I
'perubahan\ j
benruk sratist, I
=F/k(a)0.r i0.2 /
o.r\ ,' t. det Penyetesaian
\ I
H:':',l3it, )'..-.i
24 Pengantar Analisis Dinamis dan Gempa
kanan
dari
tanda sama dengan adalah sama dengannol.
Secara fisik keadaanini
dapatdiartikan
sebagai suatu gerakan yang ter-jadi
tanpa adanya gayaluar
(getaran bebas, Free Vibrationl.1.6.1 Getaran Bebas
Persamaan gerak dari getaran bebas dapat diperoleh dari per- sarnaan 30 sebagai:
Mji+ky=Q
(31)Penyelesaian persamaan 31
ini
dapat diperoleh sebagai [4, 5], y = crsin,f(f< /M)t
+ c2 cos,f(t 7U)t '
(32) dengan memakai tanda:.
= rf(r< Irra)
(33)Persamaan 32 dapat
ditulis
sebagai:y=cl
sinort+c2cosot
(34)Dalam pers*lmaan 32 dan 34
di
atas, cr, cz adalatr konstanta integrasi yang dapat diperoleh dari keadaan awal yang telah dike-tahui. Bila
keadaan awal pada walctut ' 0
dinyatakan sebagai kecepatanawal,
j,o, dan perpindatran tempat awal, yo, konstanta integrasi cr dan ce dapat diperoleh dengan cara sebagai berikut.Pada
waktu t
= 0, perpindatran tempat awal, yo dapatditulis
sebagai:
yo =Gr sino(O)+c, cosro(0) Sehingga didapatkan:
C2=]o
Sedangkan kecepatan awal dapat diperoleh dengan
dahulu menurunkan
persamaan34 terhadap
waktu memperoleh persamaan kecepatan, yaitu:jr=cr ocos
ot-c2
rosin oltsehingga
konstanta integrasi cr dapat
diperoleh, yaitu berikut:(3s) terlebih
t untuk
(36) sebagai
Analisis Struktur secara Dinamis 25
Pada waktu
t
= 0, kecepatan awal,io,
dapatditulis
sebagai:y = cr o cos co (o)- c, ro sin ro (o)
c1 = yo
/co
(37)Dengan menggunakan persamaan
35 dan 37,
penyelesaian getaran bebas (34) dapat ditutis sebagai:y=yolosin
rot+yocosot (38)Persamaan
38
merupakan penyelesaian komplementer dari penyelesaianumum
persamaangerak struktur Lhstis
dengan derajat kebebasan satu (30).1.6.1.1 Natural Perlod
Bentuk
getaran bebas yangditunjukkan dalam
persamaan38
merupakan gerakan yang berbentuk sinusoidal.Glrakan
se-perti ini dinamakan gerakan harmonis yang
karakteristiknya ditentukan oleh besar amplitude dannatuial p"rioa
gerakan ter- sebut.-Dalam hal getaran bebas dengan perpindahan tempat awal
!1ja (Ca4bar
15a)maka besar amplitude yo,
sedangkan bila diberikan percepatan awal saja (Gambar 15b), maka besar ampli- tudenya adalah ! o / a.
Natural period T adalah waktu yang dibu_tuhkan
untuk
menyelesaikan satu siklus gerakan harmonis seca- ra lengkap.26 Pengantar Analisis Dinamis dan Gempa
Seperti
terlihat
dalam persamaan 38, besar amplitude tergan-tung
kepada keadaan awal yang diberikan, tetapinatural
period tergantungdari
ro, seperti yang didefinisikan dalam persannaan33, hanya tergantung pada karakteristik dari stmktur
yangditinjau.
Besaran ol tersebutdi
atas dinamakanNatural
Circular Frequency.o, =
rf(r.tvr)
[radldetik] (3e)Besar natural period dapat diperoleh sebagai:
T=2n/o=zrrf(rralt) [detik]
(40)L.6.L.2 Natural Frequency
Natural
Frequencyf, didefinisikan
sebagaikebalikan
dari Natural Period,f =7/T =l/2xrf(tltt)
[cps, getaran perdetik]
(41)Perhatikan dalam persarnaan 39,
40
dan41
bahwa Natural Circular Frequency ro, Natural Period T dan Natural Frequency, f, adalahkarakteristik dari
sistemyang tidak
tergantung kepada keadaan awal maupun pembebanan.1.6.2 Getaran Tak Bebas
Getaran
tak
bebas {Forced Vibrationladaiah
getaran yang terjadi karena adanya bebanluar
F(t) sehingga persamaan gerak yang terjadi dapatditulis
sebagai persamaan 30:My+kr=f(t)
(42)Bila keadaan awal dari getaran
tak
bebasini tidak
nol, maka penyelesaian persamaan 42 adalah penyeiesaian umum yang ter-diri dari
penyelesaianpartikulir
dan penyelesaian komplementer.Penyelesaian komplementer, seperti telah dijelaskan sebelumnya, adalah pehyelesaian getaran bebas. Bila keadaan awal dari getar- an tak bebas
ini
nol maka penyelesaian persamaart 42 hanya ter-diri
dari penyelesaianpartikulir.
Penyelesaian
partikulir untuk bentuk-bentuk tertentu
dari F(t), misalnya polynomial atau fungsi harmonis, dapat dipelajari daribuku-buku
matematika [4, 5].Untuk
dapat membahas caraAnalisis Stniktur Secara Dinamis
umum
memperoleh penyelesaianpartikulir,
sebelumnya akandibahas gerakan
(respons)yang terjadi akibat
pembebanan impuls.1.6.2.L Bebaa
Impuls
Impuls adalah suatu
gayayang
besaryang terjadi
secaratiba-tiba dan
berlangsungdalam waktu yang sangat
pendek (Gambar 16). Beban impulsini
dapat didefinisikan ssgngai:F=Fdr
(43)nlltttl
27
Giambar 16. Beban Impuls
BiIa suatu sistem yang dalam keadaan diam dibebani dengan beban
impuls,
setelah bebanimpuls ini
bekerja, maka gerakanyang terjadi
adalah getaran bebas. Dengandemikian
gerakan yang terjadi dapat diperoleh sebagai:o
y =y/rosinot+yo coso
t
{441I(arena beban
impuls diberikan dari
keadaandiam
maka perpindahan tempatawal
adalah yo=
Or,sedangkan kecepatan awal !.o dapat dicari dari beban impuls,yditu
sebagai berikut:jio
=F/M,
lrcrcepatan awal (4s)Karena beban impuls hanya bekeda setrama dF patan awal dapat diperoleh sebagai:
j,o
=!idI=FdI/IvI
maka kece-
l47l
(4e) (46) yang dengan memperhatikan defrnisi impuls (a3) juea dapat ditu- lis sebagai:
j'o
=ilM
Dengan demikian gerakan yang terjadi dapa.t
ditulis
sebagai:y =
F/Mtosintot
(48)Bila beban impuls
baru
diberikan padawalrtu t
=f
sedang-kan
persamaan gerakditulis
terhadap refrensiwaktu t
=0,
per- sarnaan 48 menjadi:,
=r(u
o)sin(t-r))
1.6.2.2 Bebaa Sebaraag
Beban sebarang (Gambar 17) dapat dibagi-bagi menjadi bebe-
rapa beban imputs
sehingga penyelesaiangetaran tak
bebasa"irgat
bebans.uat"ng aapit
diselesaikan dengan menggunakan penyetesaian getaran akibat beban impuls (49)'avurl
Gaabar
17. Beban*banng
Analisis Struktur secara Dinamis
Ferhatikan sistem elastis
denganderajat
kebebasan satuseperti terlihat dala:n Gambar 17. Sistem tersebut
dibebani dengan beban sebarang F(t)= Fr f(t)
(Gambar 17).Akibat
satu pias yang merupakan bagian F(t), sebesar3=E f(f)af ,
gerakanyang terjadi dapat
ditulis
selagai:dy =
i'r(uto)sin(ro(t-r))
(so)atau:
dy = E r(rXr'a ro)sin (o{t -
r))ar
Respons terhadap beban sebarang secara keseluruhan dapat diperoleh dengan mengintegrasilcan persamaan 51:
y = IF, r(r)l(rra or)sin (a,(t
-r)ar
(s2)Bila didelinisikan
perpindahantempat statis (statis
deflec- tionl, yx, adalah:ys =Fr
/k
=Fr/(r'M)
(5g)Persamaan gerakan (52) dapat diubah menjadi:
y = ysr or
Jr(r)sin (o*
-r)ar
Persamaan 54 di atas merupakan penyelesaian
partikulir
dari persamaan gerak42,
sedangkan penyelesaian umum persamaan gerak tersebut merupakan gabungandari
penyelesaian komple- menter (36) dengan penyelesaianpartikulir
(54).y=iq
/ro sinot+yo cosot+y,,, Jf(f)rin(or(t-f))af
(55)1.6.3
Faktor
BebanDiaanis
(Dyaamtc Load Factor, DLF)Biggs [1]
mendefinisikanFaktor
BebanDinamis
(Dynamic Iaad Factor, DLF) sebagai perbandingan antara perpindahan tem- pat dinamis pada suatu waktu terhadap perpindahan tempat sta-tis akibat
suatu beban referensi, Fr, yang dipakaiuntuk
menya- takan besar suatu pembebanan dinamis F(t) = Fr f(t).Jadi
dyna- mic load factor dapatditulis
sebagai:DLF= yly"t =y/(Fr/k)=kylFr
(56)$I
*
; t
l
I
T
29
(su
(s4)
Dari definisi
di
atas tampak bahwa DLF adalah suatu besar- an yang tidak mempunyai dimensi dan menyatakan gerakan yang al<an terjadibila
suatu sistem dibebani dengan suatu bentuk be- ban tertentu (tidak tergantung dari besar beban yang diberikan).f .6.3.
I
ContohPcrhltua3la
Perhatikan sistem elastis dengan derajat kebebasan satu se- perti
terlihat
dalam Gambarl8a
yang dibebani dengan suatu be- Lan segitiga sepcrtiterlihat
pada Gambar 18bdari
keadaan awal diam.lrrttl
Ganber l.t.
Bcban SegitigaBeban segitiga tersebut dapat dinyatakan sebagai berikut:
F(t)
-
Fr f(t),dimana:
f(t;=1-tltd, untuk0<t<td (t) =0, untukt>td
Respons sistem tersebut terhadap pembebanan kan dapat diperoleh dengan mempergunakan 55.
(s7)
yang diberi-
Untuk
O <t
< ta, di mana keadaan awal yo= 0 dan
Yo Per- samaan 55 menghasilkan:y =
ysr,
flt
-rl
to )sin (o(t-r)ar
(s8)Persamaan 58 dapat diselesaikan dengan menggunakan cara Integration by Parts [TaylorJ:
H @
lo L*t4
(b) Fl
(a)
Analisis.Struktur secara Dinamis
i
I
I
I
ll
ir
31
y = ys
, J-(r-rto
)/ro sin (r(r-r)a
(r -r)a{ro(t-r)}
y =
yst,
(r -r
I tu )l o cos (co(t -r))* j(-
r t,o )/ ro cos (ro(t -r))ar
y = yst (t -
rto
)cos (o(t -r))-
t r(to ro) sin (o(t - r))) ]i
Memperhatikan
bahwa hasil integrasi di atas
mempunyai batas integrasif
= O dant,
maka akan didapatkan bahwa:y=yst
(t-cosrot)+l/tu (rin.t)lor-t))
(S9)atau:
DLF= 1-cos61+ (sinolt)/ <o.tr-t/to
(60)Untuk t )
to , gerakan yang terjadi adalah gerakan bebas. Ke- adaan awaluntuk
bagian gerakanini
dapat diperolehdari
persa- maan 59, dengan memakait
= t6 sebagai berikut:yo = yst (sin or tu )l(ro t6 )-cos o t6 )
i
= y,, {osin co tu +(cos co to )lto-tlto
}Oleh sebab
itu
dengan menggunakan persamaan 61, respons sistem setelaht
2t6
dapat diperolehdari
persamaan44,
yaitu sebagai:y = yst l(ol to ){sin cu t *sin o (t -td
}-yst
cos o ratau:
DLF = 1 i(or to Xrino: t -sin o (t -to )-cos ol t
Gambar 19.a, 19.b
dan
19.c menunjukkan respons dinamissuatu
sistemelastis
denganderqjat
kebebasansatu
terhadap pembebananberbentuk
segiempatdan
segitiga. Terlihat . dalam gambartersebut bahwa
besarnyadynamic load factor
sangattergantung
kepada perbandinganantara larna
pembebanan ta(atau periode
pembebanan)terhadap periode dari sistem
T.Gambar 19.d
menunjukk4n
pengaruhcara
pemberian (penam- bahan) bebanuntuk
mencapai suatu beban tetap. Terlihat dalam Gambar 19.d, respons sistem sangat tergantung kepada perban- dingan lama pembebananuntuk
mencapai suatu beban tetap ter- tentu, tr, terhadap periode sistem T.(61)
(62)
(63)
32 Pengantar Analisis Dinamis dan Gempa Analisis S.tiukhrr secara Dinamis
2
I
(d)
Ganbar
L9. Respons dinamis SDOF terhadap beberapa macam gaya33
36 Pengantar Analisis Dinamis dan Gempa
rt
E u-
)
-
o 't.4G'arnbar
2L.
DLFuntuk
beban tetap dengan kenaikan bebandari nol
lra= waktu te0adi respons max
Analisis Struktur $ecara Dinamis
Gambar 20.a menuqjukkan dynamic ioad factor maksimum
untuk
beban berbentuk segitiga dengan puncak padat
=0
dan persegi terhadap perbandingan antara ta dan T, sedangkan Gam-bar 20.b menunjukkan kapan
dicapainyadynamic load
factormaximum
tersebut,t-.
Gambar 21 menunjukkan besar dinamic load factor maksimumuntuk
beban segitiga dengan puncak yang tercapai padawaktu t =
Ye t6, terhadappJrbanding*
dari waktu pem-berian bebantd
terhadap periode T dari sistem. Ditunjukkan pula waktu dicapainya DLF maksimum ter$ebut,t-.
Gambar
21.c dan 2l.d menunjukkan dinamic load
factor maksimumuntuk
beban tetapyang dapat
dicapai dengan me- nambah beban. Dalam Gambar 22.a tampak bahwa efek dinamis dapat dihilangkanbila
penarnbahan beban diberikan sedemikianrupa
sehinggawaktu yang diperlukan untuk
mencapai beban tetap, tr, sama dengan periode sistem T.-
Persamaan gefakandari
sistem elastis dengan derajat kebe-basan satu yang
tilah
dianalisis datam bagian lainbuku ini
mau- pun -gerakan yangditunjukkan
dalam Gambar 19 memperlihat- kan bahwa setelah beban yang diberikan berhenti bekeq'a ternya-ta
gerakantidak
berhentidan
tetap berlangsungtanpa
ada pe- ngurangan amplitude.Tentu
saja dalam kenyataannya keadaanini tidak terjadi
karena dalam keadaan yang sebenarnya dapat diharapkan bahwa sernua gerakan bebas padasuatu
saat akanberhenti. Tahanan terhadap gerakan ini dinamakan
Damping yang akan dibahas dalam bagran lain buku ini.1.6.4 Gerakan pada Pondasi
Suatu struktur yang digerakkan pada
pondasinya seperti terlihat dalam Gambar 22.a dapat diidealisasikan dalam susunan massa dan per seperti diperlihatkan daiam Gambar 22.b.37
x. 9artbn toLt
i I
K(z-x-) I -fMx
IH L'J I
Frx
s oc 6 o
Oerakan bman
{b)
Gambar
22.
Gerakan pada pondasi38 Pengantar Analisis Dinarnis dan Gempa
Bila gerakan pada pondasi dinyatakan sebagai Yo dan gerak-
an
pada rnassaM
dinyatakan sebagaiyr
maka dengan menggu-nakan prinsip
dinamicequilibriurn dari
D'Alembert, persamaan gerak sistem tersebut dapatditurunkan
sebagai berikut:Miir+k(y,-yo)=0 F4l
,
Perhatikatr bahwauntuk
gayainertia harus
dipergunakan percepatanabsolut pada
massayang ditinjau, yr,
sedangkanuntuk
gaya perlawanandari
per menggunakan seUsih antara ge-rakan
pada massa,yr,
dengan gerakanpada
pondasi, yo. Bila gerakan relativedari
massa terhadap gerakan pondasi,$r -
Yo)'dinyatakan sebagai y, maka:
Y=Yr-Yo jr=ji-jio,dan iir =ii+iio
(6s)Dengan demikian persamaan gerak 64 berubah menjadi:.
M6r*jio)*kY=0,atau
Mi+ky=-Miio
(66)Perhatikan bahwa persamaan
gerak ini (66)
sama denganpersamaan
gerak getaran tak bebas (42), dengan gaya
padamassa M, F(tj, sebesar (-tut Vo).
1"7
PET{T'ELESAIAI{ AT{ALITISSTRUKTI'R
ELASTIS DENGAN DAUPIT{G DEITGANDTRA'Af
I{EBEBASAN SATUDamping adalah
suatu
besaranyang
rnenyatakan tahanan terhadap gerakanpada suatu sistem dinamis dan
merupakan salahsatu sifat fisik dari
sistem tersebut.Biia
besarsifat lisik
yanglain,
massa dan kekakuan,relatif
dapat dengan mudah di-t*i, A" ping yang
rnerupakan mekanisme penyerapan energi sangatsulit
dimengertidan
didapatkan. Besarnya dampingini
biasanya dinyatakan dalam presentasidari suatu
besaran yangdinamakan Critical
Damping,yaitu besar
dampingyang
akan menyebabkan hilangnya getaran. Ha1ini
akan dibahas lebih lan-jut
dalam bagraniain buku ini.
Besarnya dampingini
tergantung dari berbagai macam hal.Analisis SE:ukhrr sec,ara Dinamis
Macem domping yang diketahui ielah:
1.
tuictional (Couloab) DampingFrictional damping terjadi karena adanya
gesekani
daripermukaan dua buah benda yang bergerak.
2.
Viscous DampingViscous damping terjadi karena adanya gerakan dalam udara atau cairan.
3.
Internal FrictionDamping
ini terjadi
karena adanya geseranantara
molekul- molekul dari bahanSecara matematik damping dapat dinyatakan dengan rumus:
n =
c(x)'
(64)Besar pangkat
n ditentukan untuk
bermacam-macam dam- ping sebagai:Frictional
Damping,
n = O;
D = c ViscousDamping,
n = 1; D=cx
Internal
Friction,
n =2;
O=. (*)
(65) Perhitungan sistemdinamis suatu struktur
biasanya hanya memakai viscous damping, persarnaan65 b.
Dalam idealisasi, strukhrr viscous dampingini
biasanya digambarx.au* sebagai das&paf seperti terlihat dafam Gambar 23.
GaEbar 23.
Stukur
dengan damplngDengan memperhatikan damping, pe'rsamaan
gerak
sistemelastis
dengan derajatkebeban satu dapat diperoleh
dengan menggunakan cara d5mamic equilibrium D,Alembert, yaitu:39
f (tl
Pengantar Analisis O4glq9g31 C"
My+ci+ky=F(t)
(66)Penyelesaian persamaan
ini
dapat diperoleh dengan menyele-saikan
persamaan homogen (getaran bebas)yang
merypakanp""v"i"J"ian
komplementer serta mencari penyelesaianpartikulir
yaog m"menuhi persarnaatl di atas' 1.7.1 Gctetaa
iebas
dcngaa DamplngPersamaan gerak
dari
getaran beban dengan damping dapat diperolehdari firsamaan
OO dengan mengganti F(t) dengan nol schirrgga menjadi:MY+c
j'+kY=g
atau:..ck^
v+;Y+;Y=v
yang dapat diubah lebih
lanjut
menjadi:1i+2Ptoo
i+or2
Y=6di mana:
f=*ffi
dan,rro
=*/@)
(701Persamaan lraralrteristik dari persamaan 69 adalah:
7 + 2proo1* oo2 =0 (71)
Persaraaan 71 mempakan persamaan kuadrat dalam yang mem- punyai akar-akar:
'h.r
= -F(Dn
*." /${i)
172l'(67)
(68)
(6e)
PenyelesaianPersamaan6gtergantungdari'sifatakar-akar
p"r"*""t karakteristik,
persamaaa72,
sedan