LAPORAN P RAKTIKU LAPANGAN
PENGINDERAAN JAUH DASAR DESA BENTENG SOMBA OPU, KECEMATAN BAROMBONG, KABUPATEN GOWA
DISUSUN OLEH :
MUH. AL FADEL MAHATIR SYAMSIBAH 230110502003
GEOGRAFI SAINS B
PRODI GEOGRAFI SAINS
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS NEGERI MAKASSAR
TAHUN AJARAN 2023 – 2024
HALAMAN PENGESAHAN
Laporan lengkap Praktikum penginderaan jauh dengan judul “ Interprestasi Visual Penutup/Penggunaan Lahan Dan Pemuktahiran Secara Fotogrametri Menggunakan Wahana Drone ’’ ini dibuat oleh:
KELOMPOK : 4 (EMPAT)
PRODI : GEOGRAFI SAINS B
NAMA : MUH, AL FADEL MAHATIR SYAMSIBAH
telah diperiksa dan dikonsultasikan oleh Asisten dan Asisten Koordinator, maka laporan ini dinyatakan telah diterima.
Makassar, Desember 2022
Asisten Dosen Asisten Lapangan
Nurhamdi S.Si Destri Wahyudin , S.Si
Mengetahui, Dosen Penanggung Jawab
ABDUL MALIK,S.T.,M.SI.,PH..D.
NIP.19771011 200604 1 001
RINGKASAN
Penginderaan jauh adalah ilmu dan seni untuk memperoleh informasi tentang suatu objek, daerah, atau fenomena melalui analisis data yang diperoleh dengan suatu alat tanpa kontak langsung dengan objek, daerah, atau fenomena yang dikaji. Penginderaan Jauh dasar merupakan salah satu mata kuliah di jurusan geografi yang memerlukan Praktik Lapang. Tujuan diadakannya Praktek Lapang ini adalah untuk mengetahui tutupan lahan atau penggunaan lahan secara visual yang ada di lokasi penelitian dengan menggunakan wahana drone dan pemutakhiran data secara fotogrametri. Praktik kuliah lapang merupakan salah satu bagian dari mata kuliah dengan tujuan sebagai selain menerima materi juga disertai penerapan materi yang telah didapatkan tersebut, salah satunya adalah pada mata kuliah penginderaan jauh dasar itu sendiri yakni dapat meningkatkan ilmu yang pengetahuan yang dimiliki sehingga dapat terealisasikan secara langsung pula. Adapun bentuk realisasinya adalah berupa bagaimana menginterpretasikan peta dan pengoperasian alat drone yang kemudian tercipta dalam bentuk berupa gambar peta. Hasil praktek interpretasi peta membuktikan bahwa tingkat keakuratan hasil interpretasi peta sebesar 90%.
KATA PENGANTAR
Puji syukur senantiasa kita panjatkan kepada Allah Swt. Atas limpahan rahmat, ridha, dan karunia-Nya laporan Praktek Lapangan dapat diselesaikan tepat waktu. Shalawat serta salam tak lupa dihaturkan kepada Nabi Muhammad SAW sebagai suri teladan bagi umat.
Sehubungan dengan adanya mata kuliah wajib "Penginderaan Jauh Dasar", mahasiswa diharapkan dapat terjun langsung untuk melihat fenomena di lapangan.
Laporan kegiatan Praktek Lapangan ini disusun sebagai bentuk pertanggungjawaban tertulis atas terlaksananya kegiatan. Kegiatan Praktek lapangan dilaksanakan selama 2 hari, yakni pada 18 - 19 Desember 2022 di Bontoramba Jeneponto.
Kelancaran kegiatan Praktek ini tidak terlepas dari bantuan berbagai pihak, baik secara langsung maupun tidak. Oleh karena itu, penulis mengucapkan terima kasih kepada pihak-pihak yang telah membantu:
1. Bapak Abdul Malik, S.T., M.Si., Ph.D. selaku dosen pembimbing Praktek Lapangan yang telah memberikan bimbingan.
2. Kakanda Nurhamdi S.Si selaku asisten dosen yang telah membagi ilmunya 3. Tim Asisten Lapangan yang telah membimbing kami selama di lapangan.
4. Teman-teman panitia praktik lapangan yang selalu siap mewadahi kami.
5. Teman-teman Prodi Geografi Sains Angkatan 2023
Laporan ini menjelaskan hal-hal yang telah dilaksanakan selama melaksanakan praktek lapangan penginderaan jauh dasar ini. Semoga laporan praktek lapangan ini dapat memberikan manfaat, baik berupa inspirasi maupun motivasi bagi pembaca. Dalam proses pembuatan laporan tentu masih terdapat banyak kesalahan. Oleh karena itu, kritik dan saran sangat kami harapkan demi perbaikan.
Wassalamu'alaikum Wr.Wb Makassar, 04 Desember 2022
MUH. AL FADEL MAHATIR SYAMSIBAH 230110502003
DAFTAR ISI
HALAMAN PENGESAHAN ... i
RINGKASAN ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... iv
DAFTAR GAMBAR...v
DAFTAR TABEL...vi
BAB I PENDAHULUAN...1 1.1 Latar Belakang ...
1.2 Tujuan Praktek Lapang...
1.3 Manfaat Praktek Lapang...
1.4 Ruang Lingkup Praktek Lapang...
BAB II TINJAUAN PUSTAKA...
2.1 Teknologi Penginderaan Jauh ...
2.1.1 Penginderaan Jauh Citra Satelit...
2.1.2 Penginderaan Jauh Fotogrametri Drone...
2.2 Interpretasi Secara Visual...
2.2.1 Unsur Interpretasi ...
2.2.2 Teknik Interpretasi ...
2.2.3 Akurasi Hasil Interpretasi Citra ...
BAB III METODE PRAKTEK LAPANG...
3.1 Waktu dan Lokasi Praktek Lapang ...
3.2 Variabel Praktek Lapang...
3.3 Instrumen Praktek Lapang...
3.4 Prosedur Kerja ...
3.4.1 Konvergensi Bukti Hasil Interpretasi ...
3.4.2 Fotogrametri menggunakan Wahana Drone...
3.4.3 Ortho-Photo Mosaiking Data Drone ...
3.5 Analisa dan Pemrosesan Data ...
3.5.1 Uji Akurasi Hasil Interpretasi Citra...
3.5.2 Layout Ortho-Photo Mosaiking Data Drone ...
BAB IV HASIL DAN PEMBAHASAN...
4.1 Gambaran Umum Lokasi Praktek Lapang ...
4.2 Hasil dan Pembahasan...
BAB IV KESIMPULAN DAN SARAN...
4.1 Kesimpulan...
4.2 Saran ...
DAFTAR PUSTAKA...
LAMPIRAN...
RIWAYAT HIDUP...
BAB 1 PENDAHULUAN
1.1 LATAR BELAKANG
Geografi berasal dari kata geographyca (bahasa Yunani). Geo artinya bumi dan graphein artinya tulisan, uraian, lukisan atau deskripsi (pemerian).
Berdasarkan asal kata tersebut, geografi merupakan ilmu pengetahuan yang menuliskan, menguraikan, atau mendeskripsikan hal-hal yang berhubungan dengan bumi.(Iskandar, 2016)
Penginderaan jarak jauh adalah pengukuran atau akuisisi data suatu objek atau fenomena oleh sebuah alat yang tidak secara fisik melakukan kontak dengan objek tersebut atau dari jarak jauh, misalnya dari pesawat, pesawat luar angkasa, satelit, dan kapal. Contoh Penginderaan jauh antara lain satelit pengamatan bumi, satelit cuaca, memonitor janin dengan ultrasonik, dan wahana luar angkasa yang memantau planet dari orbit.
Menurut Lilesand et al. (2004) mengatakan bahwa penginderaan jauh adalah ilmu dan seni untuk memperoleh informasi tentang suatu objek, daerah, atau fenomena melalui analisis data yang diperoleh dengan suatu alat tanpa kontak langsung dengan objek, daerah, atau fenomena yang dikaji.(Somantri, 2009)
Penginderaan jauh dalam bahasa Inggris disebut Remote Sensing, Bahasa Perancis disebut Teledetection, bahasa Jerman adalah Fernerkundung, Portugis menyebutnya dengan Sensoriamento Remota, Rusia disebut Distantionaya, dan Spanyol disebut Perception Remota.
(Somantri, 2009).
1.2 TUJUAN PRAKTEK LAPANGAN
Praktek Lapangan penginderaan jauh ini bertujuan agar mahasiswa lebih bisa memahami secara langsung tentang 8 unsur pada interpretasi citra serta belajar langsung bagaiamana cara pengambilan serta pengelolahan data dan bagaimana cara mengoperasikan drone.
1.3 MANFAAT PRAKTEK LAPANGAN Adapun manfaat dari praktek lapang ini yakni :
a. Mahasiswa mampu menggunakan wahana drone sebagai alat yang digunakan untuk fotogrametri.
b. Mahasiswa mampu mengolah data hasil foto udara (fotogrametri) menggunakan aplikasi agisoft, archgis, dan google mapper.
1.4 RUANG LINGKUP PRAKTEK LAPANGAN
Adapun ruang lingkup praktek lapang penginderaan jauh dasar ini, yakni:
a. Interpretasi citra
b. Uji akurasi hasil interpretasi
c. Fotogrametri menggunakan aplikasi drone
BAB II
TINJAUAN PUSTAKA 2.1 Teknologi Penginderaan Jauh
Berbicara tentang penginderaan jauh, dalam konsepnya ada kemudian komponen-komponen yang berperan dalam prosesnya. Adapun komponen-konponen itu sebagai berikut :
a.Tenaga Sumber tenaga yang digunakan dalam penginderaan jauh yaitu tenaga alami dan tenaga buatan.
Tenaga alami berasal dari matahari dan tenaga buatan biasa disebut pulsa. Penginderaan jauh yang menggunakan tenaga matahari disebut sistem pasif dan yang menggunakan tenaga pulsa disebut sistem aktif.
Sistem pasif dengan cara merekam tenaga pantulan maupun pancaran.
Dengan menggunakan pulsa kelebihannya dapat digunakan untuk pengambilan gambar pada malam hari.
b.Objek
Objek penginderaan jauh adalah semua benda yang ada di permukaan bumi, seperti tanah, gunung, air, vegetasi, dan hasil budidaya manusia, kota, lahan pertanian, hutan atau benda-benda yang di angkasa seperti awan.
c.Sensor
Sensor adalah alat yang digunakan untuk menerima tenaga pantulan maupun pancaran radiasi elektromagnetik. Contohnya kamera udara dan scanner.
d.Detektor
Detektor adalah alat perekam yang terdapat pada sensor untuk merekam tenaga pantulan maupun pancaran.
e.Wahana
Sarana untuk menyimpan sensor, seperti pesawat terbang, satelit dan pesawat ulang-alik
2.1.1 Penginderaan Jauh Citra Satelit
Menurut Lillesand and Keifer (1979) Pengindraan jauh (remote sensing) adalah ilmu dan seni untuk memperoleh informasi tentang suatu objek, daerah, atau fenomena dengan jalan analisis data yang diperoleh melalui alat perekam (sensor) yang menggunakan gelombang elektromagnetik sebagai media perantaranya tanpa menyentuh objek tersebut. Curran (1985) Pengindraan jauh adalah penggunaan sensor radiasi elektromagnetik untuk merekam gambar lingkungan bumi yang dapat di interpretasikan sehingga menghasilkan informasi yang berguna. Menurut Colwell (1984) Penginderaaan Jauh yaitu suatu pengukuran atau perolehan data pada objek di permukaan bumi dari satelit atau instrumen lain di atas atau jauh dari objek yang diindera. Menurut Lindgren (1985) Penginderaan Jauh yaitu berbagai teknik yang dikembangkan untuk perolehan dan analisis informasi tentang bumi.
Berdasarkan pengertian tersebut dapat disimpulkan bahwa pengindraan jauh adalah ilmu,Teknik, dan seni yang digunakan untuk memperoleh suatu system informasi tentang objek, wilayah dan segala gejala di permukaan bumi dengan cara menganalisa dengan menggunakan alat tanpa kontak langsung.
Jenis data pada pengindraan jauh, yaitu citra. Citra merupakan gambaran objek yang terlihat pada lensa kamera hasil cetakan. Jenis citra ada 2 yaitu citra foto dan non foto. Citra foto adalah citra yang dihasilkan oleh sensor kamera. Misalnya, foto Kawasan desa yang terperangkap oleh sensor satelit.
Sementara citra non foto adalah citra yang dihasilkan oleh sensor selain kamera seperti sensor infred yang bisa membaca temperature disetiap wilayah.
Adapun citra-citra satelit yang bisa mengahsilkan citra digital yaitu sebagai berikut :
a. Satelit Landsat b. Satelit SPOT
c. Satelit IKONOS d. Satelit Terra Aster e. Satelit Quickbird
f. Satelit Resourcesat-1 (IRS-P6) g. Satelit ALOS
h. Satelit Worldview i.Satelit NOAA j.Satelit HCMM k. Satelit GMS
l.Satelit HIMAWARI
m. Satelit Terra-Aqua MODIS n. Satelit JERS-1
o. Satelit ERS-SAR
Citra sendiri didefinisikan sebagai gambaran suatu obyek yang diperoleh dengan cara optik, elektro optik, optik mekanik atau elektronik. Secara garis besar, citra dapat diklasifikasikan menjadi dua, yaitu citra foto dan citra non-foto. Berikut penjelasannya:
• Citra Foto (foto udara): Foto udara direkam secara fotografik menggunakan kamera dan film sebagai detektornya. Mempunyai karakteristik yaitu skala, geometri, dan informasi tepi foto udara yang diaplikasikan untuk pemetaan dasar, aplikasi untuk sumber daya alam (Pertanian, hidrologi, geologi, perubahan fungsi lahan). Contoh foto udara yaitu : Foto udara konvensional, foto udara’small format’, dan foto udara digital.
• Citra Non Foto (citra satelit): Citra satelit direkam berdasarkan penyiaman (scanning) secara elektronik pada pita magnetic.
. Prinsip pengenalan objek pada citra visual bergantung pada karakteristik atau atribut yang tergambar pada citra. Karakteristikobjek pada citra digunakan sebagai unsur pengenalan objek yang disebut unsur-unsur interpretasi. Menurut Sutanto (1999) unsur-unsur interpretasi meliputi sebagai berikut:
a. Rona atau warna (tone/color). Rona adalah tingkatan kegelapan atau kecerahan objek pada citra, sedangkan warna adalah wujud yang tampak oleh mata. Rona ditunjukkkan dengan gelap-putih. Pantulan rendah, ronanya gelap, pantulan tnggi ronanya putih.
b. Bentuk (shape) adalah variable kualitatif yang memberikan konfigurasi atau kerangka suatu objek. Bentuk merupakan atribut yang jelas sehingga banyak objek yang dapat dikenali berdasarkan bentuknya saja, seperti bentuk memanjang, lingkara, dan segi empat.
c.Ukuran (size) adalah atribut objek yang antara lain berupa jarak luas, tinggi, kemirigan lereng, dan volume.
d.Kekasaran (texture) adalah frekuensi perubahan rona pada citra atau pengulangan rona terhadap objek yag terlalu kecil untuk dibedakan secara individual.
e.Pola (pattern) adalah hubungan susunan spasial objek. Pola merupakan ciri yang menandai objek bentukan manusia ataupun alamiah
f.Pola (pattern) adalah hubungan susunan spasial objek. Pola merupakan ciri yang menandai objek bentukan manusia ataupun alamiah.
g.Situs (site) adalah letak suatu objek terhadap objek lain di sekitarnya.
h.Asosiasi (association) adalah keterkaitan antara objek yang satu dengan objek lain.
2.1.2 Penginderaan Jauh Fotogrametri Drone
Fotogrametri adalah suatu seni, pengetahuan dan teknologi untuk memperoleh informasi yang dapat dipercaya tentang suatu obyek fisik dan keadaan di sekitarnya melalui proses perekaman, pengamatan atau pengukuran dan interpretasi citra fotografis atau rekaman gambar gelombang elektromagnetik. Seiring berkembangnya ilmu dan teknologi, teknik fotogrametri terus berkembang. Mulai dari fotogrametri analog, fotogrametri analitik hingga fotogrametri digital (Softcopy
Photogrammetry) (Santoso, 2001 dalam Syauqani, Subiyanto, & Suprayogi, 2017).
Kegiatan pemetaan secara fotogrametris yaitu menggunakan foto udara yang dilakukan selama puluhan tahun menyebabkan semakin berkembang pula peralatan dan teknik dalam pemetaan, diikuti dengan perkembangan fotogrametri yang akurat dan efisien, serta sangat menguntungkan didalam bidang pemetaan. Fotogrametri dapat dimanfaatkan untuk kegiatan pemetan yang memerlukan ketelitian tinggi, sehingga perkembangan selanjutnya sebagian besar pemetaan topografi dan juga pemetaan persil dilakukan dengan menggunakan fotogrametri (Suyudi, 2014).
Akusisi data fotogrametri tidak melakukan kontak fisik secara langsung itu menjadikan perbedaan yang absolut dengan surveying. Terdapat informasi penting dari akusisi fotogrametri tersebut, yaitu:
1. Informasi Geometris Informasi Geometris meliputi posisi spasial dan bentuk dari obyek. Hal ini merupakan sumber informasi paling penting yang bisa diperoleh dari fotogrametri.
2. Informasi Temporal Informasi Temporal berkaitan dengan perubahan obyek dari e42waktu ke waktu. Biasanya dilakukan dengan membandingkan beberapa gambar yang direkam dari waktu yang berbeda.
Jenis-jenis fotogrametri bisa dikategorikan dengan beberapa cara (Hadi,2007):
a. Fotogrametri udara; menghasilkan citra udara dengan ketinggian lebih dari ± 300 meter.
b. Foto terestris; foto yang diambil secara langsung dilokasi yang sudah ditetapkan.
c. Fotogrametri jarak dekat; pengambilan foto dengan jarak kamera dan obyek 100 mm sampai 300 m.
Pada metode kombinasi fotogrametri dilakukan dengan pengambilan gambar vertikal menggunakan UAV dan horisontal menggunakan kamera DSLR, pengambilan gambar di sekitar obyek itu sendiri dipotret dengan posisi kamera yang konvergen setelah pemotretan dengan posisi konvergen
dilanjutkan dengan metode close range photogrammetry yaitu pengambilan gambar dari jarak 15m sampai close up dengan objek tersebut (Atkinson, 1996).
Tahap awal sebelum pemotretan harus memasang retro, pemasangan retro harus menyebar di setiap obyek yang akan dipotret sehingga dapat dilihat di foto. Titik-titik ini akan dipakai untuk proses refrencing.
2.2INTERPRETASI SECARA VISUAL
Interpretasi visual merupakan langkah untuk meninjau foto udara atau citra satelit dengan tujuan untuk mengidentifikasi objek dan menilainya.
Interpretasi citra udara dan satelit adalah metode untuk memperoleh informasi tentang objek dan lanskap. Ini adalah proses khusus mempelajari realitas geografis berdasarkan deteksi, identifikasi, dan lokalisasi spasial objek individu dan bentuk medan yang ditangkap dalam foto udara dan rekaman citra satelit. Objek juga memiliki karakteristik visual yang memungkinkan kita untuk membedakannya.
2.2.1 Unsur Interpretasi
Pengenalan objek merupakan bagian paling fital dalam interpretasi citra.
Foto udara sebagai citra tertua di dalam pengindraan jauh memiliki unsur interpretasi yang paling lengkap di bandingkan unsur interpretasi pada citra lainnya.
• Rona dan warna
Rona merupakan tingkat kecerahan atau kegelapan suatu objek yang terdapat pada citra. Adapun karakteristik objek yang memengaruhi rona yaitu :
a. Obyek yang memiliki permukaan kasar cenderung menimbulkan rona gelap pada foto karna sinar yang datang mengalami hamburan hingga mengurangi sinar yang di pantulan .
b. Obyek yang memiliki warna gelap atau lembab cenderung menimbulkan rona gelap.
c. Obyek yang bersifat basah cenderung menimbulkan rona yang gelap karena air bersifat menyerap gelombang elektromahgnetik.
Sedangkan warna adalah wujud yang tampak oleh mata dengan menggunakan spectrum tampak.
• Bentuk
Bentuk merupakan cerminan kerangka obyek, baik bentuk umum maupun bentuk rinci.
• Ukuran
Atribut obyek yang antara lain berupa jarak, luas, tinggi, lereng dan volume.Ukuran meliputi dimensi panjang, luas, tinggi, kemiringan, dan volumesuatu obyek.
• Tekstur
Frekuensi perubahan rona pada citra atau pengulangan rona obyek yang terlalu kecil untuk di bedakan secara individual.
• Pola
Pola atau susunan keruangan merupakan ciri yang menandai bagi banyak objek bentukan manusia dan bagi beberapa objek alamiah.
• Bayangan
Bayangan sering menjadi kunci pengenalan yang penting bagi beberapa objek dengan karakteristik tertentu, seperti cerebong asap, menara, tangki minyak dan lain-lain.
• Situs
Menurut estes dan simonett, situs adalah letak sutau objek terhadap objek lain di sekitarnya. Situs juga di artikan sebagai letak objek terhadap bentang darat, seperti situs suatu objek di rawa, di puncak bukit yang kering dan sebagainya.
2.2.2 Teknik Interpretasi
Link dan simonett ( 1976 ) menjelaskan bahwa setidaknya ada tiga tahapan proses interpretasi citra inderaja yaitu deteksi, identifikasi, dan analisa kesimpulan. Sebelum menganalisa foto udara maka seseorang interpreter harus menguasai terlebih dahulu unsur-unsur interprtasi citra.
1.Deteksi
Tahapan ini merupakan tahapan pengenalan onjek-onjek yang tampak pada foto udara menggunakan alat stereoskop. Tahapan pertama ini merupakan langkah paling dasar dan paling mudah di antara tahapan selanjutnya.
2. Identifikasi
Tahap ini merupakan tahap pengelompokan objek-objek yang memiliki ciri- ciri yang sama. Tahapan ini sudah mulai memerlukan kejelian dan lebih rumit dibandingkan diteksi.
3. Analisis
Tahap ini merupakan fase akhir dari interpretasi citra inderaja yaotu penarikan kesimpulan atau pengelompokan objek-objek yang sudah di identifikasi.
Ada beberapa teknik interpretasi, yakni:
a.Tehnik interpretasi
Untuk melaksanakan kegiatan interpretasi bias di lakukan beberapa cara/tehnik. Menurut shape (1982) secara garis besar terdapat dua macam tehnik interpretasi
b.Tehknik secara langsung
Adalah kegiatan interpretasi yang melibatkan langsung antara interpreter (penginterpretasi), kelompok sasaran dengan obyek interpretasi yang ada sehingga kelompok sasaran dapat secara langsung melihat,mendengar, atau bila mungkin mencium meraba dan merasakan obyek-obyek interpretasi yang di pergunakan dan biasanya dengan tahap pelaksanaan sebagai berikut :
1) Informasi
Kelompok sasaran akan mendapat informasi tentang obyek yang akan di kunjungi .
2) Rencana kegiatan pelaksanaan program akan di jelaskan pada suatu pusat pengunjung atau di kenal juga dengan nama pusat informasi, jadi kelompok sasaran sudah lebih dahulu mengetahui program interpretasi yang di pilih dan garis besar rencana perjalananya.
3) Penyampaian uraian-uraian
Di lakukan olleh interpreter pada saat melaksanakan program interpretasinya.
c. Tehnik secara tidak langsung
Adalah kegiatan interpretasi yang di lakukan dengan menggunakan alat bantu dalam memperkenalkan objek interpretasi.interpretasi di sajikan dalam suatu program slide,video,film,rangkaian gambar-gambar dan sebagainya.
2.2.3 Akurasi Hasil Interpretasi Citra
Pengujian dilakukan untuk mencocokkan hasil klasifikasi dengan keadaan sebenarnya di lapangan. Metode yang digunakan untuk menghitung akurasi klasifikasi dengan menggunakan confusion matrix/error matrix.
Metode confusion matrix/error matrix membandingkan data per kategori (kelas) antara data yang sebenarnya di lapangan (reference data) dengan data hasil klasifikasi. Jensen (2005) mendiskripsikan cara perhitungan masing-masing faktor akurasi sebagai berikut:
a) Akurasi keseluruhan (overall accuracy), cara menghitungnya dengan membagi jumlah piksel benar (jumlah diagonal utama) dengan jumlah total piksel dalam matriks kesalahan
b) Akurasi produser (producer’s accuracy), cara menghitungnya dengan membagi jumlah piksel benar dalam satu kategori dengan jumlah total piksel dalam kolom kategori tersebut.
c) Akurasi pemakai (user’s accuracy), cara menghitungnya dengan membagi jumlah piksel benar dalam satu kategori dengan jumlah total piksel dalam baris kategori tersebut.
BAB III
METODE PRAKTEK LAPANG
3.1 WAKTU DAN LOKASI PRAKTEK LAPANG
Praktek lapangan Remote Sensing dilakukan pada tanggal 18-19 November 2023 yang berlokasi pada koordinat 119º24’43.0” BT dan 5º11’36.5” LS di Kelurahan Bantaeng Somba Opu, Kecamatan Barombong, Kabupaten Gowa, Provinsi Sulawesi Selatan. Peta lokasi praktek bisa di lihat di bawah ini:
Gambar 3.1 Peta Lokasi Praktek Lapang 3.2 VARIABEL PRAKTEK LAPANG
Adapun variabel yang digunakan dalam praktik lapang ini adalah : 1 .Interpretasi Citra
2. Pengolahan data interpretasi citra menggunakan Agisoft
3.3 INSTRUMEN PRAKTEK LAPANG
Adapun alat dan fungsinya yang digunakan pada praktek lapangan ini di Kelurahan Benteng Somba Opu, Kecamatan Barombong, Kabupaten Gowa adalah sebagai berikut:
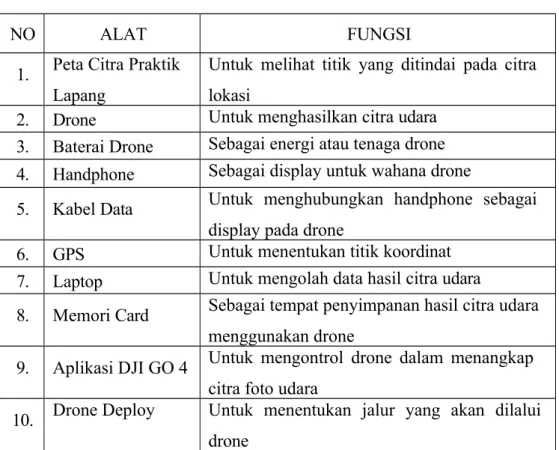
Tabel 3.3 Instrumen alat dan fungsinya
NO ALAT FUNGSI
1. Peta Citra Praktik Lapang
Untuk melihat titik yang ditindai pada citra lokasi
2. Drone Untuk menghasilkan citra udara 3. Baterai Drone Sebagai energi atau tenaga drone 4. Handphone Sebagai display untuk wahana drone
5. Kabel Data Untuk menghubungkan handphone sebagai display pada drone
6. GPS Untuk menentukan titik koordinat 7. Laptop Untuk mengolah data hasil citra udara
8. Memori Card Sebagai tempat penyimpanan hasil citra udara menggunakan drone
9. Aplikasi DJI GO 4 Untuk mengontrol drone dalam menangkap citra foto udara
10. Drone Deploy Untuk menentukan jalur yang akan dilalui drone
3.4 PROSEDUR KERJA 1. Interpretasi Citra
Yang pertama adalah kita harus melakukan deteksi untuk mengetahui sebuah benda dan juga gejala yang ada di sekitar lingkungan menggunakan alat sensor.
Kemudan setelah itu, kita melakukan identifikasi sebuah objek dengan 9 unsur interpretasi citra : rona/warna, ukuran, bentuk, tekstur, pola, bayangan, situs dan asosiasi.
Melakukan pengenalan terhadap suatu objek secara langsung.
Setelah itu kita melakuakan analisis yang bertujuan untuk mengelompokkan sebuah objek yang mempunyai sebuah citra sama dengan identifikasi sebuah objek.
Setelah itu kita melakukan deduksi yang didasarkan pada bukti yang mengarah kepada khususan.
Kemuadian klasifikasi atau mendeskripsikan sebuah penampakan yang dibatasi.
Dan yang terakhir adalah idealis yaitu menyajikan hasil dari interpretasi citra kedalam bentuk peta.2. Pengambilan Data
Membuat jalur terbang terlebih dahulu menggunakan Drone Deploy yang telah di kontrol pada HP.
Siapkan alat dan bahan dan cek kelengkapan sebelum menuju ke lapangan.
Melakukan pemasangan bagian-bagian terhadap wahana drone, yaitu pemasangan propeller dan baterai.
Menyalakan Remote Kontrol.
Mengaktifkan Drone untuk mengecek apakah pemasangan bagian-bagian drone telah terpasang dengan baik
Matikan kembali drone
Letakkan Handphone pada remote sebagai display drone
Melakukan koneksi antara Remote Kontrol dengan handphone
Menghubungkan remote drone dengan HP yang telah menginstal aplikasi DJI GO 4 dan Drone deploy.
Pastikan mode drone berada pada huruf P (autopilot).
Menghidupkan Drone kembali.
Drone akan terbang mengikuti jalur terbang yang telah dibuat dan melakukan pengambilan gambar.
Untuk menerbangkan drone dibutuhkan pilot dan Co pilot. Pilot bertugas untuk mengamati keadaan drone berupa baterai dan lajur terbang drone pada layar HP dan Co pilot bertugas untuk mengamati doren secara langsung ketika terbang.
Pilot harus selalu mengarahkan antena kearah terbangnya drone.
Setelah telah selesai melakukan pengembalian data, drone akan otomatis kembali ke titik pilot berada.
Pada ketinggian 20m, tekan pause pada aplikasi Pix4D Capture dan lakukan landing manual sampai Co pilot memegang drone tersebut.
Lakukan pencabutan bagian bagian drone dan menyimpan di tempat nya kembali
3. Pengolahan Data
Resizer data foto yang sudah diambil dengan menggunakan aplikasi Faststone photo resizer
Kemudian lanjut mengolah data dengan memasukan foto yang tadi di aplikasi Agisoft metashape proa) Pilih menu workflow > add folder > pilih file > select folder
> single camera > oke
b) Workflow > align photo, accuracy : low, source > oke c) Workflow > build dense cloud, quality : low > oke
d) Workflow > build mesh, source data : dense cloud, surface type : arbitrary (3D), face count : low (22,363) > oke
e) Workflow > Build texture, texture type : diffuse map >
source data : images, mapping mode : adaptive ortophoto, blending mode : mosaic (default), texture size : 4096 > oke
f) Workflow > build tiled model, source data : dense cloud, pixel size : 0.129088, title size : 256, face count : low > oke g) File > save > pilih folder untuk menyimpan file > save h) Workflow > build DEM, geographic, WGS 84, source data :
dense cloud, interpolation : enabled (default), > oke
i) Double tap DEM > export DEM > export TIFF,BIL,XYZ >
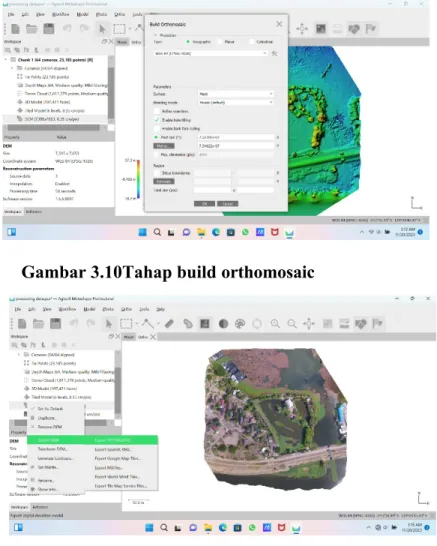
Export > Pilih folder untuk menyimpan file DEM > Save j) Workflow > build orthomosaic, surface : mesh, blending
mode
: mosaic (default), pixel size > oke
k) Double tap orthomosaic > export orthomosaic > export JPEG/TIFF/PNG > pilih folder untuk menyimpan file >
export
Kemudian layout di aplikasi Arcmap/Arcgis 3.4.1 Konvergensi Bukti Hasil InterpretasiKonvergensi bukti hasil interpretasi di lakukan dengan cara ground truth atau pembuktian secara langsung dengan cara datang ke titik yang akan diinterpretasi yang telah ditentukan sebelumnya pada peta citra.
a. Menentukan titik yang akan diinterpretasi pada peta citra
b. Melakukan identifikasi terhadap titik yang telah dipilih dan ditandai pada peta citra
c. Melakukan ground truth dengan cara mendatangi lokasi atau titik yang telah ditentukan secara langsung
d. Kemudian mengidentifikasi jenis penggunaan lahan yang benar, apakah sesuai dengan identifikasi sebelumnya yang telah dilakukan sebelum turun kelapangan.
e. Mengambil foto atau gambar menggunakan handphone serta menentukan titik koordinat tiap lokasi
f. Kemudian melakukukan penghitungan akurasi dengan menggunakan tabel akurasi.
3.4.2 Fotogrametri Menggunakan Wahana Drone
a) Membuat jalur terbang terlebih dahulu menggunakan Pix4DCapture yang telah di kontrol pada HP.
b) Siapkan alat dan bahan dan cek kelengkapan sebelum menuju ke lapangan.
c) Melakukan pemasangan bagian-bagian terhadap wahana drone, yaitu pemasangan propeller dan baterai.
d) Menyalakan Remote Kontrol.
e) Mengaktifkan Drone untuk mengecek apakah pemasangan bagian- bagian drone telah terpasang dengan baik
f) Matikan kembali drone
g) Letakkan Handphone pada remote sebagai display drone h) Melakukan koneksi antara Remote Kontrol dengan handphone i) Menghubungkan remote drone dengan HP yang telah menginstal
aplikasi DJI GO 4 dan Pix4Dcapture.
j) Pastikan mode drone berada pada huruf P (autopilot).
k) Menghidupkan Drone kembali.
l) Drone akan terbang mengikuti jalur terbang yang telah dibuat dan melakukan pengambilan gambar.
m) Untuk menerbangkan drone dibutuhkan pilot dan Co pilot. Pilot bertugas untuk mengamati keadaan drone berupa baterai dan lajur terbang drone pada layar HP dan Co pilot bertugas untuk mengamati doren secara langsung ketika terbang.
n) Pilot harus selalu mengarahkan antena kearah terbangnya drone.
o) Setelah telah selesai melakukan pengembalian data, drone akan otomatis kembali ke titik pilot berada.
p) Pada ketinggian 20m, tekan pause pada aplikasi Pix4D Capture dan lakukan landing manual sampai Co pilot memegang drone tersebut.
q) Lakukan pencabutan bagian bagian drone dan menyimpan di tempat nya kembali
3.4.3 Orto-Photo Mosaiking Data Drone
Ortho-Photo Mosaiking Data Drone menggunakan aplikasi agisoft dengan melakukan beberapa tahap yaitu sebagai berikut:
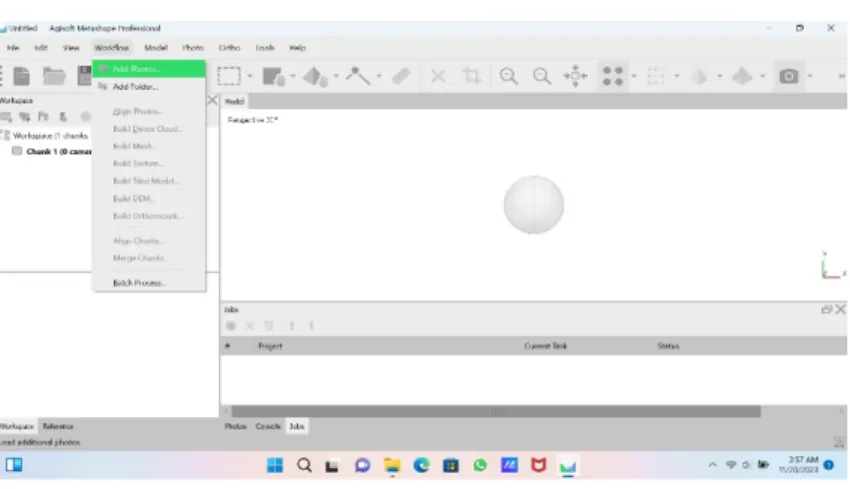
1. Memasukkan folder foto udara
Gambar 3.1 Tahap Add folder foto udara 2. Proses melakukan allign phot0
Gambar 3.2 Tahap Allign Photo
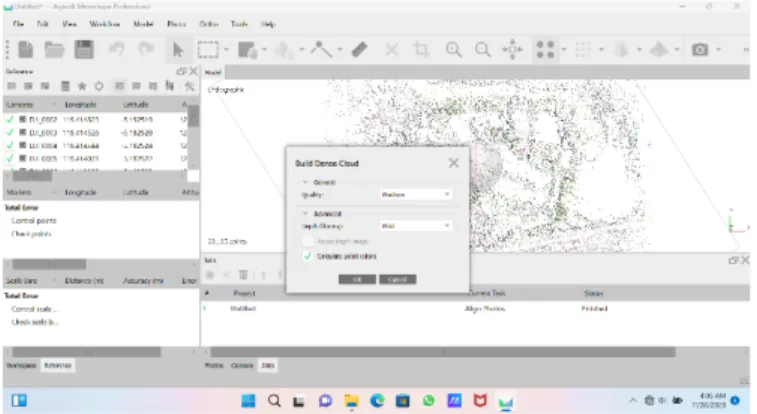
3. Proses pembuatan build dense cloud
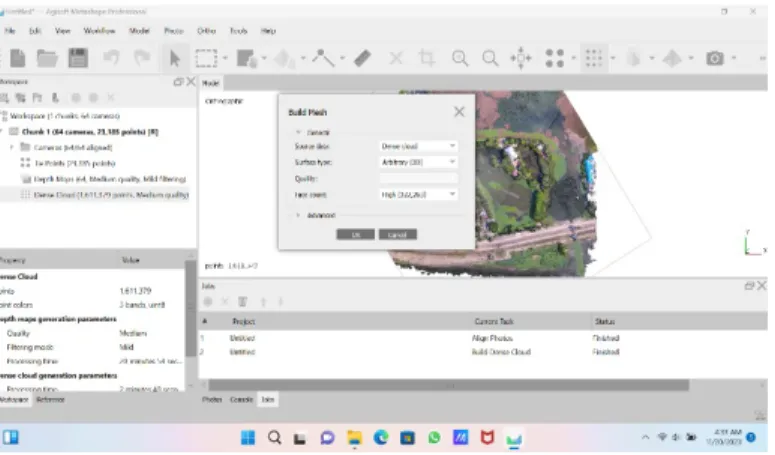
Gambar 3.3 Tahap Build Dense Cloud 4. Proses pembuatan build mesh
Gambar 3.4Tahap Build Mesh 5. Proses pembuatan build texture
Gambar 3.5 Tahap Build Textur
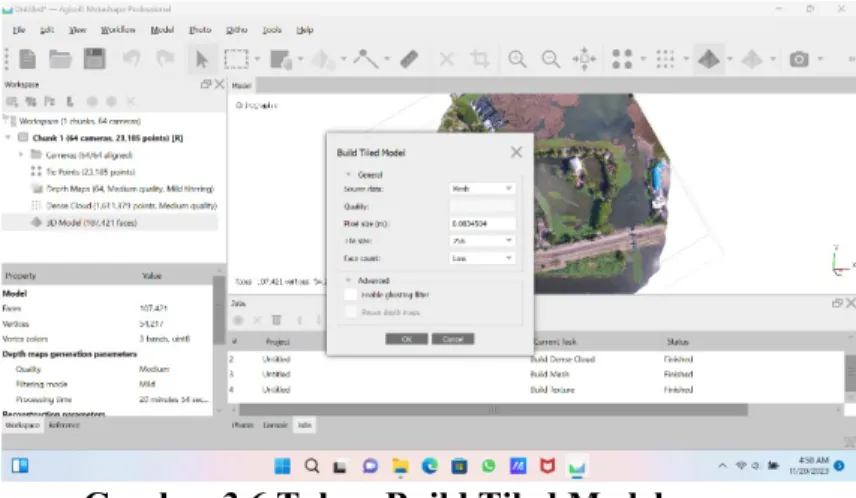
6. Proses pembuatan build tiled model
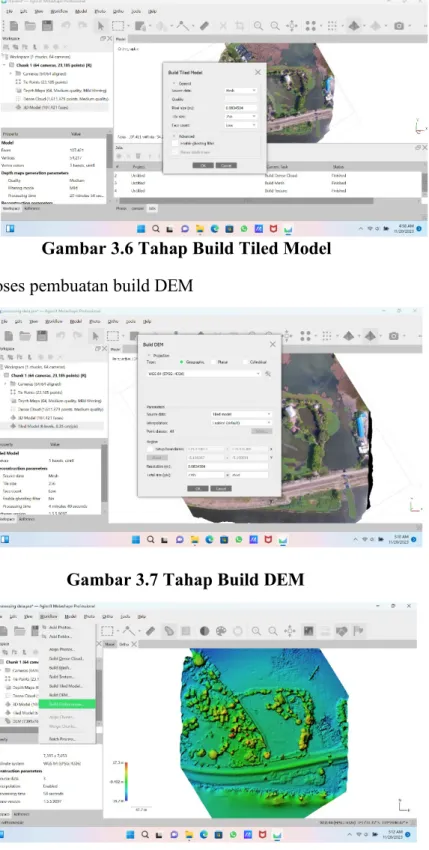
Gambar 3.6 Tahap Build Tiled Model 7. Proses pembuatan build DEM
Gambar 3.7 Tahap Build DEM
Gambar 3.8 Tahap Build DEM
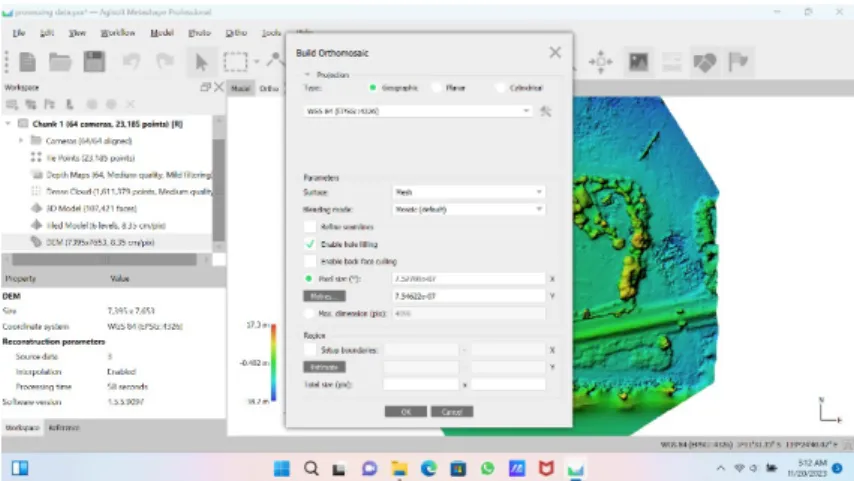
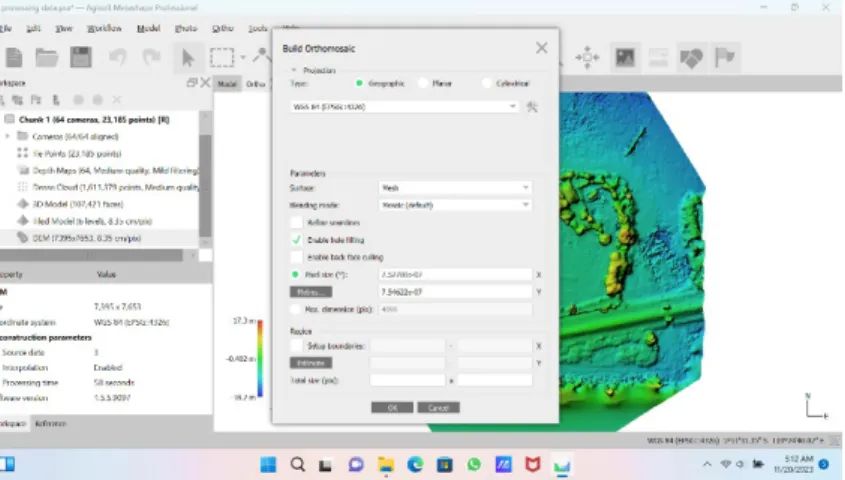
Gambar 3.9 Tahap Build DEM 1. Proses pembuatan build orthomosaic
Gambar 3.10Tahap build orthomosaic
Gambar 3.11 Tahap build orthomosaic
Gambar 3.12 Tahap export orthomosaic 3.5 Analisis dan Pemrosesan Data
3.5.1. Uji Akurasi Hasil Interpretasi Citra
Pengujian akurasi citra dilakukan dengan membandingkan objek yang teridentifikasi pada peta terhadap keadaan sebenarya. Adapun langkah – langkah yang dilakukan sebagai berikut :
a.Membuat tabel akurasi data. Titik yang akan di interpretasi yaitu 10 titik.
b.Mengimput nilai hasil ground truth yang telah dilakukan.
c. Tabel ini akan menunjukkan jumlah identifikasi yang salah dan identifikasi yang benar.
d. Nilai-nilai yang ada dalam tabel akurasi kemudian dijumlahkan, lalu dibagi dengan jumlah titik yang telah diinterpretasi pada saat melakukan ground truth.
e. Hasil penjumlahan tersebut kemudian di kalikan dengan 100 untuk mendapatkan nilai persentasi akurasi hasil ground truth.
Hasil dari interpretasi awal dimasukkan ke dalam table. Disesuaikan apakah hasil penggunaan lahan berdasarkan interpretasi awal sudah sesuai dengan penggunaan lahan berdasarkan metode ground truth. Jika interpretasi benar, diberikan angka 1, jika salah diberikan angka 0. Untuk menghitung tingkat akurasi interpretasi digunakan rumus yakni :
3.4.4 Layout Ortho-Photo Mosaiking Data Drone
Ubah foto udara dari bentuk tif menjadi file ecw dengan global mapper, Kemudian masukkan foto udara yang telah diubah kedalam arcgis, Lakukan layout peta foto udara dengan arcgis, Unsur-unsur yang ada dalam layout yaitu skala bar dan skala batang, sumber peta, koordinan sistem dan legendanya.
BAB IV
HASIL DAN PEMBAHASAN
4.1 GAMBARAN UMUM LOKASI PRAKTEK LAPANG
Kabupaten Gowa merupakan salah satu kabupaten yang ada di Sulawesi Selatan, Indonesia. Lokasi pratik lapangan kali ini bertempatkan di Kelurahan Somba Opu, Kecamatan Barombong, Kabupaten Gowa. Kelurahan Benteng somba opu secara astronomis terletak pada 119º24’43.0” BT dan 5º11’36.5 LS. Seperti daerah pada umumnya, di Kelurahan Benteng somba opu terdapat kawasan pemukiman, persawahan dan ladang. Selain itu, terdapat pula beberapa lahan yang digunakan untuk membuat kos kosan, tambak dan juga terdapat memelihara hewan ternak seperti ayam dan sapi juga terdapat banyak pepohonan di pekarangan tiap permukiman seperti pohon rambutan, pohon mangga, pohon jambu biji. Tempat tinggal masyarakat desa ini mayoritas rumah batu dan ada juga perumahan dalam tahap pembangunan. Pendidikan di desa ini juga pada umumnya cukup baik karena disediakan sekolah dari taman kanak-kanak (TK) sampai sekolah menengah atas (SMA). Masyarakat di desa ini pada umumnya bekerja sebagai petani, pedagang, dan pengusaha.
Gambar 4.1 Image Google Earth Kec. Barombong 4.2 HASIL DAN PEMBAHASAN
1. Konvergensi Hasil Bukti Interpretasi
Tabel 4.1 Interpretasi Citra
TABEL INTERPRETASI CITRA
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : Persegi Ukuran : Besar Tekstur : Sedang Pola : T
eratur
Bayangan :Ada Situs :Permukiman Asosiasi :Rumah kos Pembahasan Kunci Interpretasi Citra Visual:
• Rona warna pada objek citra berfariasi karena didalamnya terdapat beberapa objek bangunan
• Bentuk dari objek merupakan bentuk persegi yang dimana biasanya menggambarkan sebuah permukiman
• Tekstur yang terjadi dilapangan dan di objek interpretasi terlihan teratur Pendapat kami dari objek citra kurang dapat membedakan antara permuahan warga dengan rumah kost
2. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : Persegi Ukuran : Sedang Tekstur : Sedang Pola : Teratur Bayangan : Ada Situs : Perumahan Asosiasi : Perumahan
Pembahasan Kunci Interpretasi Citra Visual:
• pola dari permukiman biasanya teratur dan terdapat banyak bangunan didalamnya
• ukuran bangunan biasanya berukuran sedang dan menyebar sepanjang jalan
• rona warna pada pemukiman biasanya berfariasi karena terdapat beberapa objek didalamnya
Didalam permukiman tidak dapat membedakan antara permuhaan dengan penjula dan perumahan
3. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : Persegi Ukuran : Sedang Tekstur : Sedang Pola : teratur Bayangan : Ada Situs : Perkotaan Asosiasi : Lahan terbuka
Pembahasan Kunci Interpretasi Citra Visual:
• Ukuran bangunan biasanya sedang dan menyebar di berbagai tempat
• Warna ronanya sedang pada permukiman yang biasanya berfariasi dan berbagai warna
• Pola teratur dengan yang ada di perumahan dan juga di interpretasi Di dalam perumahan terdapat pola yang hamper sama dengan interpretasi yang di indentifikasi
4. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi
Rona/Warna: Sedang Bentuk :Persegi Ukuran : Besar Tekstur : Sedang Pola : Segi empat Bayangan : Ada
Situs : Daerah jauh dari permukiman
Asosiasi : Masjid Pembahasan Kunci Interpretasi Citra Visual:
• Rona warna terliht jelas karena hanya ada perbandingan warna antara vegetasi dengna bangunan masjid
• Ukuran bangunan masjid pada objek dan lapangan berukuran besar Tidak terdapat kesalahan pada onjek dan data yang diperoleh dilapangan karena terlihat jelas gambar bangunannya
5. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Terang Bentuk : Perrsegi panjang
Ukuran : Sedang Tekstur : Halus Pola : Teratur Bayangan : Ada Situs :Desa
Asosiasi : Perumahan Pembahasan Kunci Interpretasi Citra Visual:
• Pola Teratur dengan yang ada di kompleks perumahan dan yang di interpretasi
• Bayangan ada sama dengan data lapangan yang di foto
• Rona dan warna senada dengan yang di interpretasi bangunan dengan data lapangan
Di dalam kompleks perumhan terdapat pola yang sama dengan interpretasi dan data lapangan
6. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : persegi Ukuran : Sedang Tekstur : Kasar Pola : Teratur Bayangan : Ada Situs : Perkotaan Asosiasi : Permukiman Pembahasan Kunci Interpretasi Citra Visual:
• Pola permukiman biasanya memiliki pola yang teratur persegi karena di buat oleh 1 individu
• Bentuk pada objek pemukiman biasanya memiliki bentuk yang sama yaitu berbentuk persegi
• Ukuran objek perumahan memilikiukuran yang sama setiap ukurannya sehingga dapat di simpulkan bawah objek twesebut adalah permukiman
7. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : Persegi Ukuran : Sedang Tekstur : Sedang Pola : Teratur
Bayangan : Ada Situs : Perkotaan
Asosiasi : Permukiman
Pembahasan Kunci Interpretasi Citra Visual:
• Rona dan warna sedan ada permukiman dengan data lapangan
• Bentuk pada objek permukiman biasanya memiliki bentuk yang sama yaitu berbentuk persegi
• Bayangan ada pada interpretasi dan juga data lapangan
8. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : Persegi Ukuran : Sedang Tekstur : Sedang Pola : Beraturan Bayangan : Ada Situs : Desa
Asosiasi : Perumahan Pembahasan Kunci Interpretasi Citra Visual:
• Rona dan warna senada karena memiliki warna yang bervariasi
• Ukuran pada objek sedang karena memiliki hampir sama dengan bangunan yang ada
• Pola permukiman memiliki pola yang teratur memanjang karena dibuat perkelompok
9. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi
Rona/Warna: Cerah Bentuk : Persegi panjang
Ukuran : Sedang Tekstur : Halus Pola : Teratur Bayangan : Ada Situs : Lahan terbuka Asosiasi : Permukiman Pembahasan Kunci Interpretasi Citra Visual:
• Bentuk persegi Panjang karena interpretasi dan data lapangan sesuai
• Tekstur halus karena terdapat pembukaan lahan yang ada di interpretasi dan tidak sesuai pada lapangan
10. Nama Objek
Objek di Citra Foto di Lapangan Unsur Interpretasi Rona/Warna: Sedang Bentuk : Persegi Ukuran : Kecil Tekstur : Sedang Pola : Tidak beraturan Bayangan : Ada Situs : Lahan terbuka Asosiasi : Lahan kosong
Pembahasan Kunci Interpretasi Citra Visual:
• Warna rona nya ssedang pada lahan kosong yang terdapat vegetasi
• Tekstur Sedang karena data interpretasi memiliki bangunan dan lahan terbuka atau kosong
Berdasarkan tabel diatas, kita dapat mengetahui bahwa ada 10 objek yang akan diuji kesesuiannya dengan keadaaan yang sebenarnya di lapangan. Diantara 10 objek tersebut, masing mansing terdiri dari daerah sawah atau ladang, perkebunan, perumahan, lapangan terbuka, tanah kosong bangunan sekolah, peternakan serta permukiman. Pengamatan objek disetiap titik koordinat menjadikan peta sebagai acuan dalam interpretasi.
Melalui peta citra, kita mula-mula melakukan proses interpretasi terhadap 9 titik lokasi dengan memerhatikan 8 unsur interpretasi citra, setelah itu melakukan groundtruth atau konvergensi bukti dari hasil interpretasi yang telah di lakukan tadi. Adapun kunci interpretasi yang digunakan yaitu berdasarkan unsur-unsur interpretasi citra yang nampak melalui citra tersebut, yang diantaranya yaitu Rona, Warna, Tekstur, Bentuk, Ukuran, Pola, Bayangan, Situs, dan Asosiasi (Arsy, 2013; Agoes, 2018).
Setelah proses identifikasi dilakukan, dapat diketahui bahwa terdapat 8 objek berupa penggunaan lahan yang berhasil teridentifikasi. Kemudian, dilakukan proses konvergensi data untuk dapat mengetahui tingkat akurasi dari proses interpretasi yang telah dilakukan. Mengetahui tingkat akurasi penting untuk dilakukan untuk dapat mengetahui keakuratan dari proses analisis dan hasil interpretasi yang dilakukan agar dapat memberi informasi yang tepat (Lubis, 2017).
Adapun proses konvergensi data dilakukan dengan melakukan groundtruth atau pengecekan secara langsung di lapangan. Setelah itu, hasil pengecekan lapangan ini kemudian dimasukkan ke dalam tabel sebagai berikut untuk dapat menghitung tingkat akurasinya.
Objek
Objek di Lapangan
Total Perumah
an Mesjid Permukim
an Lahan
kosong
Perumhan 2
Mesjid 1
Permukim 2
an Lahan
kosong 2
Total Total 70
(%) : Formula yang digunakan untuk penilaian akurasi adalah sebagai berikut:
Total Accuracy= × 100% = 70 Objek Hasil Interpretasi Citra
Gambar 4.2 Hasil layout menggunakan arcgis
Layout gambar di atas di hasilkan dari akuisisi foto udara menggunakan wahana drone yang sudah dilaukan di lapangan. Sebelum dilakukan layout, hasil akuisisi data foto udara mencakup wilayah yang sempit yakni daerah persawahan disekitar tambak. Layout diatas di hasilkan dari hasil fotogrametri menggunakan drone yang kemudian datanya akan kita olah di aplikasi agisoft lalu setelah di olah di agisoft kemudian di layout menggunakan arcgis. Pada agisoft, dimasukkan foto-foto hasil drone kemudian dilakukan align photo, build dense cloud, build mesh, build texture, build tiled model, build dem kemudian orthomozaic sehingga menghasilkan peta yang selanjutnya akan di layout di arcgis. Align foto merupakan tahap awal pada pengolahan data udara digital menggunakan perangkat lunak agisoft photoscan. Di tahap ini, proses identifikasi point secara otomatis dilakukan dengan menggunakan alogaritma SIFT invariant.
Alogaritma ini menggunakan logika yang dimana akan mengenali setiap titik-titik yang memiliki kesamaan pixcel dan akan membentuknya menjadi menjadi point cloud atau disebut smart poin. Sebelum itu, proses align foto terlebih dahulu dilakukan proses penyeleksian foto. Hal ini dilakukan pada foto yang tidak digunakan untuk pembuatan orthofoto. Pada tahap Build
Dense Cloud agar memperoleh point cloud lebih padat berdasarkan pada posisi kamera yang sudah diperhitungkan oleh alogaritma program. Di tahapan ini, photo tunggal yang di hasilkan diubah menjadi foto orthophoto.
BAB V
KESIMPULAN DAN SARAN 5.1 KESIMPULAN
Penginderaan jauh didefinisikan sebagai ilmu dalam mengumpulkan informasi suatu objek tanpa menyentuh atau berkontak fisik langsung dengan objek tersebut. Secara umum, penginderaan jauh berkaitan dengan pengolahan citra dalam mengetahui atau mengamatai suatu fenomena di muka bumi. Prinsip dasar dari penginderaan jauh adalah adanya rekaman interaksi antara gelombang elektronik dan objek di muka bumi yang tertangkap oleh sensor penangkap gelombang.
Penangkap gelombang ini dapat berupa satelit, pesawat, atau pesawat tanpa awak.
Manfaat Penginderaan Jauh adalah untuk Pemetaan geologi dan geomorfologi, misalnya eksplorasi mineral dan energi, pemetaan terjadinya suatu fenomena di muka bumi, misalnya kebakaran, kebanjiran, degradasi lahan, perubahan lahan, dan lain – lain, dan pemetaan bencana alam. Foto dan Video udara adalah pengambilan foto dan video melalui wahana tanpa awak. Dengan sudut pengambilan tertentu dengan tujuan mendapatkan hasil gambar yang informatif sesuai keinginan dari pemberi tugas.
Umumnya sudut pengambilan tidak tegak lurus untuk mendapatkan efek kedalaman gambar. Adapun contoh fptp udata yaitu pemetaan menggunakan drone yang merupakan sebuah aktivitas untuk mendapatkan sebuah peta wilayah dengan gambar yang dihasilkan oleh drone (Fotogrametri). Sampai hari ini drone menjadi populer di kalangan para mapper. Secara umum fotogrametri merupakan teknologi geo- informasi dengan memanfaatkan data geospasial yang diperoleh melalui pemotretan udara.
5.1 SARAN
Diharapkan kepada mahasiswa agar lebih bersungguh-sungguh saat mengikuti praktek lapang selanjutnya agar apa saja yang diajarkan saat di lapangan dapat dipahami dengan baik dan semoga praktikan kedepannya lebih serius lagi dalam menginterpretasi citra, dan lebih memperhatikan lagi 8 unsur interpretasi citra, dan semoga kedepannya lebih disiplin lagi dalam mengambil data.
DAFTAR PUSTAKA
Agoes, H. F., Irawan, F. A., & Marlianisya, R. (2018). Interpretasi Citra Digital Penginderaan Jauh Untuk Pembuatan Peta Lahan Sawah dan Estimasi Hasil Panen Padi. Jurnal INTEKNA: Informasi Teknik dan Niaga, 18(1):24-30.
Arsy, R. F. (2013). Metode Survei Deskriptif Untuk Mengkaji Kemampuan Interpretasi Citra Pada Mahasiswa Pendidikan Geografi FKIP Universitas Tadulako. Kreatif, 16(3):62-72.
Lilesand T.M dan Keifer. 2004 Penginderaan Jauh dan Interpretasi Citra.
Lubis, D. P., Pinem, M., & Simanjuntak, M. A. N. (2017). Analisis Perubahan
Garis Pantai Dengan Menggunakan Citra Penginderaan Jauh (Studi Kasus di Kecamatan Talawi Kabupaten Batubara). Jurnal Geografi, 9(1): 21-31.
Semedi, B., & Lutfi, O. M. (2019). Pemanfaatan Data Citra Satelit Sentinel- 2 Untuk Asesmen Habitat Dasar Perairan Pantai Selatan Sempu Kabupaten Malang. JFMR (Journal of Fisheries and Marine Research), 3(2):273-279.
Siebert S., Teizer J. 2014. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system.
Automation in Construction 41: 14.
Solikhin, A., Minarno, P.A., Junaedi, D., Putra, I.E., (2016). Penelitian Gempabumi Memicu Gerakan Tanah di Kabupaten Aceh Tengah, Aceh. Bandung: Pusat Vulkanologi dan Mitigasi Bencana Geologi, KESDM.Yogyakarta Gadjah Mada University Press.
Yusuf, Daud. Pengideraan Jauh. Buku ajar penginderaanprogram studi geografi
LAMPIRAN
RIWAYAT HIDUP
Penulis bernama A.Selvi lahir di Mikuasi pada tanggal 14 Desember 2004. Penulis merupakan anak kedua dari empat bersaudara. Mulai menempuh pendidikan di TK Kuncup Pertiwi 2010, kemudian melanjutkan Pendidikannya di SD N 1 Mikuasi 2011 sampai dengan tahun 2017. Di tahun 2017 penulis melanjutkan studi pendidikannya di MTS N 2 Kolaka Utara. Setelah tamat pada tahun 2017 penulis melanjutkan studi pendidikannya di SMAN 1 Pakue dan tamat pada tahun 2022. Setelah menamatkan pendidikan dasar dan menengah baik menengah pertama maupun menengah atas, penulis melanjutkan pendidikan pada tahun 2023 di Universitas Negeri Makassar (UNM) Fakultas Matematika dan Ilmu Pengetahuan Alam, jurusan Geografi, prodi Geografi Sains.