2 Penyusun
1. Sholihatul Jannah 20050514002 2. Arrori ashar hidayad 20020514020 3. Reja Diki Pradana 20050514032 4. Alfi Khamidatun Nusroh 20050514043 5. Gigih adi mahardika 20050514044 6. Moch. Orindra S. 20050514046 7. Asyraf Rahmat Hidayatulloh 20050514048 8. Rico Firmansyah 20050514054 9. Afif Ma'ruf Nasrullah 20050514057 10. Safiq Maulana Ishaq 20050514058 11. Berliana Nadiya Jarweni 20050514060
3 KATA PENGANTAR
Puji syukur kita panjatkan ke hadirat Tuhan Yang Maha Esa, atas segala rahmat dan hidayah-Nya, sehingga kita masih diberikan kesempatan untuk terus belajar dan berkembang dalam bidang ilmu teknologi dan rekayasa. Segala puji bagi Allah SWT yang telah melimpahkan berkah-Nya kepada kita semua. Dalam rangka mendukung pembelajaran di bidang teknologi, kami dengan senang hati mempersembahkan modul pembelajaran ini dengan judul "Line Follower Analog." Modul ini dirancang untuk memberikan pemahaman dan keterampilan kepada pembaca dalam mengembangkan sistem kendali robot berbasis sensor linier.
Penggunaan line follower menjadi semakin penting dalam perkembangan dunia robotika, terutama dalam aplikasi pada berbagai kompetisi robot dan proyek-proyek ilmiah. Dengan memahami prinsip kerja line follower analog, diharapkan pembaca dapat mengaplikasikan konsep ini dalam pengembangan robot cerdas yang mampu mengikuti jalur dengan presisi. Modul ini disusun secara sistematis dan didukung oleh contoh-contoh aplikatif yang relevan. Kami berharap modul ini dapat menjadi panduan yang bermanfaat bagi pembaca, baik sebagai referensi mandiri maupun sebagai bahan ajar dalam lingkungan pendidikan formal atau non-formal.
Tentunya, kami mengucapkan terima kasih yang sebesar-besarnya kepada semua pihak yang telah berkontribusi dalam penyusunan modul ini. Semoga modul ini dapat memberikan kontribusi positif dalam peningkatan pengetahuan dan keterampilan pembaca di bidang robotika.
Akhir kata, kami mengharapkan masukan dan saran yang membangun dari pembaca guna perbaikan dan pengembangan modul ini di masa yang akan datang.
Selamat membaca dan semoga sukses selalu dalam setiap langkah perjalanan belajar Anda.
Surabaya, 28 Desember 2023 Penulis
4 DAFTAR ISI
Halaman
KATA PENGANTAR ... 2
DAFTAR ISI ... 4
BAB I PENDAHULUAN ... 5
A. Deskripsi ... 5
B. Prasyarat ... 5
C. Petunjuk penggunaan modul ... 5
D. Kompetensi... 6
E. Cek kemampuan ... 6
BAB II PEMBELAJARAN ... 7
A. Kompetensi 1: Komponen elektronik penyusun robot ... 7
1. Indikator ... 7
2. Uraian materi ... 7
3. Tes formatif... 13
4. Job sheet ... 15
B. Kompetensi 2: Membuat rangkaian elektronik robot ... 18
1. Indikator ... 18
2. Uraian materi ... 18
3. Tes formatif ... 24
4. Job sheet ... 26
C. Kompetensi 3: Analisa rangkaian elektronik robot ... 34
1. Indikator ... 34
2. Uraian materi ... 34
3. Tes formatif... 35
4. Job sheet ... 36
BAB III PENUTUP ... 45
DAFTAR PUSTAKA ... 46
5 BAB I PENDAHULUAN
A. Deskripsi
Ketika seseorang sedang mempelajari sistem robotika atau sedang mencoba untuk merancang sebuah sistem robotika, berarti dia sedang mempelajari dan sedang meracang sebuah sistem mekatronika. Maka diharapkan, seseorang yang mampu merancang sebuah robot sederhana, maka ia mampu pula merancang sebuah sistem mekatronika yang kompleks.
Dalam pembelajaran elektronika robot, diperlukan perangkat pembelajaran berupa modul ajar. Dengan modul ini akan memudahkan seseorang dalam mempelajari suatu hal/ilmu yang sedang dipelajarinya. Sama halnya dengan pembelajaran elekronika robot, maka adanya modul ini dikembangkan untuk menunjang dan mempermudah kompetensi elektronika robot. Dalam modul ini metode pembelajaran yang digunakan adalah pembelajaran konseptual yang berorientasi pada pendekatan kebutuhan robotika. Modul ini dirancang dan bungkus dengan sederhana namun tidak informasi yang diberikan dapat menjadi jawaban atas pertanyaan dan kebingungan yang mungkin dirasakan oleh pembaca (mahasiswa/peserta didik) karena pada modul ini tidak hanya diberikan pembahasan singkat terkait sejarah definisi robot tetapi juga dilengkapi dengan model dan contoh aplikasi yang dipakai dalam sebuah komponen elektronika.
Modul elektronika robot ini mempelajari tiga hal, yaitu: (1) pengenalan komponen elektronika penyusun robog (2) membuat rangkaian elektronik robot, dan (3) analisa rangkaian elektronik robot.
B. Prasyarat
Dalam pembelajaran ini diharapkan telah memenuhi beberapa syarat di bawah ini.
1. Peserta didik menguasai pemahaman dasar tentang robotika.
2. Peserta didik telah lulus kompetensi dasar analog dan digital.
3. Peserta didik mampu menggunakan alat ukur elektronik dengan baik dan benar.
C. Petunjuk penggunaan modul
Modul ini merupakan modul pendamping utama peserta didik dalam mempelajari mata diklat Elektronika Robot. Berikut petunjuk bagi peserta didik dalam penggunaan modul.
1. Pelajari modul dengan teliti, cermat dan seksama.
2. Ambil alat dan bahan yang diperlukan.
3. Sebelum pengerjaan dimulai, silahkan cek terlebih dahulu alat dan bahan yang akan digunakan. Kemudian ikuti langkah pengerjaan sesuai dengan petunjuk teknis yang telah ada.
4. Perhatikan keselamatan alat kerja.
6 5. Jika ditemukan kesulitan atau ada yang belum dipahami, tanyakan pada
pendidik atau instruktur bengkel.
D. Kompetensi
Setelah pembelajaran dilakukan sesuai dengan modul ini, peserta didik diharapkan memahami dan menjelaskan dengan bahasa peserta didik terkait sejarah definisi robot. Selain itu peserta didik juga diharapkan mampu mengimplementasikan beberapa poin di bawah ini.
1. Memahami komponen elektronika penyusun robot
a. Mampu menjelaskan macam-macam komponen elektronik dan kegunaannya.
b. Mampu menjelaskan macam-macam device yang digunakan untuk mauver robot.
c. Mampu menjelaskan actuator yang digunakan untuk manuver robot.
2. Memahami pembuatan rangkaian elektronik robot a. Mampu menggambar skema rangkaian elektronik robot.
b. Mampu menggambar layout PCB (Printed Circuit Board) rangkaian elekronik robot.
c. Mampu mencetak layout PCB pada sebuah CCB (PCB polos).
d. Mampu memasang komponen komponen elektronika pada PCB.
e. Mampu menyolder komponen dengan baik dan benar.
3. Memahami analisa rangkaian robot
a. Mampu menjelaskan fungsi tiap bagian pada rangkaian robot.
b. Mampu menjelaskan fungsi rangkaian tambahan pada robot.
c. Mampu menjelaskan kerusakan yang terjadi pada rangkaian robot.
d. Mampu menjelaskan cara memperbaiki rangkaian elektronik robot.
E. Cek kemampuan
Sebelum mempelajari mdoul ini lebih lanjut, isilah penyataan berikut dengan cara cek list () pada kolom di bawah ini dengan sikap jujur dan dapat dipertanggung jawabkan!
Pernyataan
Jawaban
Bila jawaban “Ya”
kerjakan Tidak Ya
Saya memahami tentang komponen elektronik penyusun robot
Soal Tes Formatif 1
Saya memahami pembuatan rangkaian elektronik robot
Soal Tes Formatif 2 Saya memahami analisa
rangkaian elektronik robot
7 BAB II PEMBELAJARAN
A. Kompetensi 1: Komponen elektronik penyusun robot 1. Indikator
1. Mampu menjelaskan macam-macam komponen elektronik.
2. Mampu menjelaskan macam-macam device yang digunakan untuk manuver robot.
3. Mampu menjelaskan macam-macam actuator yang digunakan untuk manuver robot.
2. Uraian materi
Sejarah Definisi Robot
Robot adalah sebuah alat elektro-mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dahulu melalui kecerdasan buatan. Selain itu biasanya robot digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor.
Kata ‘robot’ berasal dari kata robota terdapat pada sebuah teater sains yang berjudul Rossum’s Universal Robots (RUR), karya Karel Capek dari Czech (1921) yang berarti ‘bekerja atau pekerja’. Kemudian, istilah robot berkembang dari waktu ke waktu sesuai dengan teknologi yang berkembang pada waktu tersebut.
Secara formal, robot sendiri didefinisikan sebagai berikut: Robot is an automatic device that performs functions ordinarily ascribed to human beings (Webster’s Dictionary) atau any automatically operated machine that replaces human effor, though it may not resemble human beings in appearance or perform functions in humanlike manner (Encyclopaedia Britanica). Definisi ini merujuk kepada fungsi utama robot pada waktu itu, yaitu sebagai alat bantu otomatis untuk mengerjakan pekerjaan-pekerjaan manusia yang sulit, berbahaya dan berulang. Yang kemudian dengan seiring berkembangnya waktu, definisi ini berkembang sejalan dengan pengaplikasian robot dunia industri yang semakin kompleks dan beragaram.
Defini robot berdasarkan pendekatan ini yaitu An industrial robot is a reprogrammable and multifunctional manipulator designed to move materials, parts, tools, or special devices through variable programmed motions for the performance of variety tasks (Robotics Industry Association, RIA, 1985). Secara teknoloogi, definisi robot pada waktu ini telah memasukkan unsur ‘reprogrammable’ yang artinya pada waktu itu telah dikembangkan suatu alat yang mampu memprogram dan dapat diprogram ulang yang digunakan sebagai ‘otak’ dari robot itu sendiri untuk memngerjakan pekerjaan-pekerjaan industri. Kemudian, diketahui juga alat tersebut merupakan mikroposesor.
8 Setelah berkembangnya teknologi material/bahan, sensor dan ilmu kecerdasan buatan (articial intellegence), maka berubah pula defenisi robot.
Definisi robot yang ada pada waktu terakhir ini adalah sebagai berikut: A robot is a system that interacts with the world already, and learning as method of improving its performance (Brooks, 91) dan A robot is a machine able to extract information from its environment and use knowledge about its world to move safely in a meaningful and purposive manner (Arkin, 98).
Dimana pada masa ini, robot sudah mampu berinteraksi dengan lingkungannya dan mengambil informasi darinya, yang kemudian untuk melakukan proses pembelajaran sendiri sehingga mampu meresponnya dalam bentuk suatu tindakan dalam rangka mengerjakan fungsi tertentu. Artinya, robot sudah mampu untuk berinteraksi dan mengambil infoemasi dari lingkungannya melalui sensor tertentu. Selainn itu, pada robot juga sudah memiliki sistem kecerdasan buatan berupa algoritma tertentu dalam mikroposesornya untuk melakukan suatu tindakan yang akan diambil olehnya.
Dari beberapa defini robot di atas, maka bisa ditarik kesimpulan berupa beberapa sifat dan karakteristik pada robot masa kini, yaitu sebagai berikut:
1. Bergerak tanpa harus dikendalikan langsung oleh manusia.
2. Bergerak secara multi-aksis (rotasi dan translasi).
3. Dapat diprogram ulang.
4. Dapat mengambil keputusan tertentu secara otomatis.
5. Dapat berinteraksi, mengambil informasi dan memanipulasi lingkungannya.
6. Memiliki sistem kecerdasan buatan.
Untuk menghindari hal-hal yang dikhawatirkan oleh manusia akita
‘perkembangan’ pesat dari robot, maka sejak awal dibuat Tiga Hukum Robot.
Tiga Hukum Robot dalam genre cerita fiksi ilmiah adalah tiga buah peraturan yang ditulis oleh Isaac Asimov, yang harus dipatuhi oleh hampir semua robot-robot positroniknya, yang terdapat dalam karya-karya cerita fiksinya.
Meskipun dalam berbagai cerita sebelumnya pernah disebutkan secara selintas, Tiga Hukum Robot pertama kali diperkenalkan secara lengkap pada tahun 1942 dalam cerita pendek “Runaround”, yang menyatakan sebagai berikut:
1. Robot tidak boleh melukai manusia, atau dengan berdiam diri, membiarkan manusia menjadi celaka (A robot may not injure a human being or, through inaction, allow a human being to come to harm).
2. Robot harus mematuhi perintah yang diberikan oleh manusia kecuali bila perintah tersebut bertentangan dengan Hukum Pertama (A robot must obey orders given to it by human beings except where such orders would conflict with the First Law).
3. Robot harus melindungi keberadaan dirinya sendiri selama perlindungan tersebut tidak bertentangan dengan Hukum Pertama atau Hukum Kedua (A robot must protect its own existence as long as such protection does not conflict with the First or Second Law).
9 Yang belakangan, Asimov menambahkan Hukum Ke-Nol; “Robot tidak boleh mencelakakan umat manusia, atau dengan berdiam diri, membiarkan umat manusia menjadi celaka” (A robot may not harm humanity, or, by inaction, allow humanity to come to harm); hukum-hukum selanjutnya dapat disesuaikan secara berturut-turut, untuk mengakomodasi hukum ini.
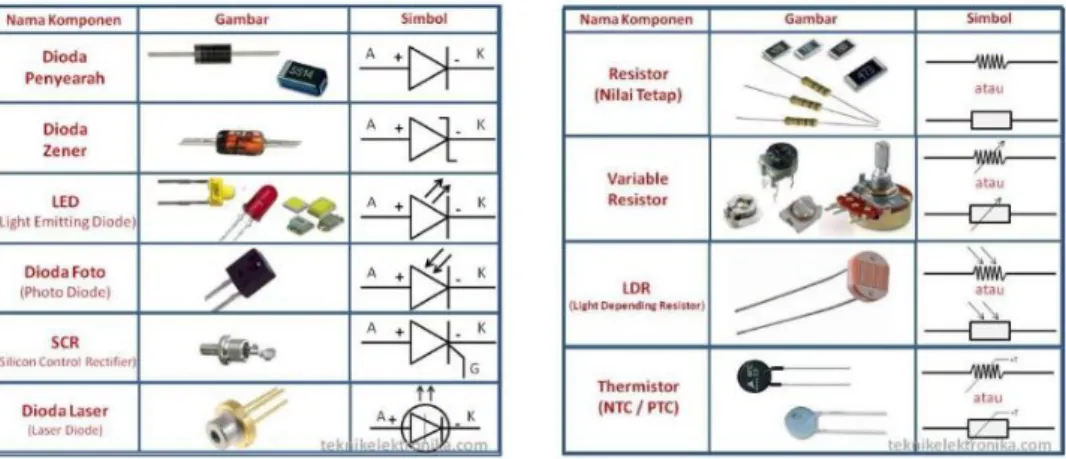
Komponen Elektronik Penyusun Robot A. Resistor
Resistor atau hambatan banyak dipakai pada teknik listrik dan elektronika.
Resistor dibuat dengan berbagai cara, misalnya ada yang dibuat dari kawat tertentu (misalnya nikelin) yang digulung sedemikian rupa dalam suatu kerangka (gambar 1). Resisotor jenis ini tahan terhadap temperatur tinggi sehingga digunakan untuk instalasi arus yang besar. Selain jenis kawat gulung, ada juga resistor yang dibuat dari keramik (semacam tanah liat) atau dari karbon yang disemprotkan pada keramik. Resistor semacam ini kurang tahan terhadap temperatur sehingga hanya digunakan untuk arus yang kecil- kecil (alat-alat elektronika) seperti gambar 2.
Dilihat dari konduksinya, ada resistor yang dapat diatur harga ohmnya dan ada yang tidak. Resistor yang dapat diatur disebut variabel resistor atau bisa juga disebut potensiometer (Gambar 3). Sedangkan resistor yang tidak dapat diatur disebut fixed resistor.
10 B. Kapasitor
Kapasitor atau juga sering disebut kondensator adalah sebuah komponen elektronika yang dapat menyimpan energi listrik dalam bentuk muatan listrik dalam waktu tertentu tanpa disertai reaksi kimia. Sebuah kapsitor terdiri dari 2 konduktor yang disekat oleh sebuah nonkonduktor. Kedua konduktor tersebut disebut elektroda dan non konduktor disebut dielektrika. Terlihat pada gambar di bawah ini :
Jenis-jenis kapasitor sebagai berikut : 1. Kapasitor Kertas
2. Kapasitor Keramik 3. Kapasitor Elektrolit(elco)
4. Kapasitor udara (Kapasitor Variabel) sering disebut Varco.
5. Kapasitor Plastik
Kapasitor dibedakan menjadi 2 kategori, yaitu kapasitor terkutub (polar) dan tidak terkutup (nonpolar). Perbedaan polar dan nonpolar adalah pada kapasitor polar memiliki 2 kutup anoda (+) dan katoda (-) yang menunjukkan bahwa pemasangan kapasitor polar pada rangkaian listrik tidak boleh terbalik antara potensial + dan – rangkaian, Sedangkan kapasitor nonpolar tidak terkutub dan dapat dihubungkan dengan rangkaian listrik (sumber muatan listrik) secara sembarang.
C. Diode
Dioda merupakan komponen penting dalam elektronika. Dalam skema rangkaian, dioda dilambangkan. Dari lambang sudah dilihat bahwa arah arus mempengaruhi sifat dari dioda. Satu sisi dari dioda disebut anoda, yang lain katoda. Katoda ada pada ujung depan dari segitiga. Komponen dioda sering berbentuk silinder kecil dan biasanya diberi lingkaran pada katoda untuk menunjukkan posisi garis dalam lambang.
11 Dioda mengijinkan arus untuk mengalir ke satu arah saja. Ketika anoda mendapatkan voltase yang lebih positif dari pada katoda, maka arus bisa mengalir dengan bebas. Dalam situasi ini dikatakan dioda bias maju. Kalau voltase dibalikkan, berarti katoda positif terhadap anoda, arus tidak bisa mengalir kecuali suatu arus yang sangat kecil. Dalam situasi ini dikatakan dioda dibias balik atau dibias mundur. Arus yang mengalir ketika dioda dibias balik disebut arus balik atau arus bocor dari dioda dan arus itu begitu kecil sehingga dalam kebanyakan rangkaian bisa diabaikan. Supaya arus bisa mengalir ke arah maju, voltase harus sebesar ≈0,7V pada dioda Si/
Silicon(yang biasa ada di pasaran) dan ≈0,3V pada dioda Ge (Germanium) dan voltase/tegangan lebih besar lagi untuk LED. LED (Light Emiting Diode) merupakan dioda yang dapat memancarkan cahaya seperti halnya lampu, akan tetapi prinsif kerjanya seperti dioda biasa. LED pada umumnya digunakan sebagai lampu indikator pada rangkaian elektronik. Photo Dioda merupakan dioda yang memiliki resistansi/tahanan dalam yang tahanan tersebut dapat berubah-ubah ketika mendapatkan cahaya dari luar. Dioda Zener merupakan satu jenis khusus yang juga bisa mengalirkan arus ke arah sebaliknya. Sifat dioda sama seperti dioda biasa, hanya dioda Zener dirancang untuk memiliki voltase break through pada voltase tertentu. Biasanya dioda zener dipakai pada arah balik sehingga voltase pada dioda ini konstan sebesar voltase zenernya.
D. IC LM324N
IC lm324 adalah sebuah semikonduktor yang berbentuk ic yang diperuntukkan sebagai komponen enguat sederhana, dan banyak aplikasi lainnya. C LM 324 banyak digunakan dalam rangkaian penguat sederhana dengan daya kecil, maupun rangkaian audio karena mempunyai banyak keunggulan. Salah satunya adalah bentuk yang ringkas, kinerja bagus sehingga memudahkan kita melakukan pembuatan rangkaian yang simpel, ringkas, dan sederhana ketimbang menggunakan transistor yang memungkinkan penggunaan dalam jumlah lebih banyak. LM324 juga banyak ditemukan pada rangkaian power supply yang memerlukan tegangan stabil dan kepraktisan, ini memungkinkan penempatan power supply dengan bentuk lebih simpel dan kecil. IC LM324 menghemat penggunaan tegangan dc karena bisa bekerja pada tegangan rendah antara 3 hingga 5 volt dengan tingkat kestabilan yang bagus. Untuk lebih jelasnya mengenai kegunaan IC
12 LM324, berikut kami berikan beberapa poin fungsinya yang paling umum dijumpai:
1. Sebagai penguat audio
2. Sebagai rectifier pada power supply
3. Sebagai komponen utama pada rangkaian oscillator 4. Sebagai komponen pada rangkaian komparator 5. Untuk penguat awal atau pre-amp
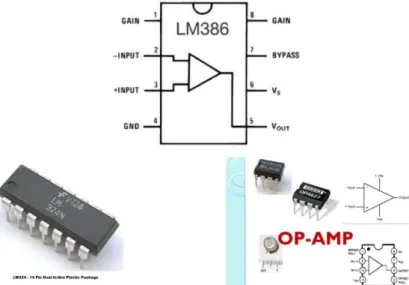
Bentuk IC LM324 adalah komponen semikonduktor dengan berbentuk kotak dengan 14 pin sebagai kaki yang terhubung dengan pcb. Masing- masing pin mempunyai fungsi berbeda, ini memberikan penjelasan bagaimana sebuah ic yang berisi 4 op-amp mampu memberikan banyak fungsi menarik yang dikemas dalam 1 semikonduktor. Sehingga kegunaannya yang luas dapat memudahkan kita dalam membuat rangkaian elektronika yang simpel dan mudah dioperasikan.
Berikut bagan dalam IC LM324:
Pada gambar diatas kita dapat melihat bagaimana masing-masing pin pada IC LM324 mempunyai fungsi berbeda. Yang memberikan pilihan untuk kita menggunakan aplikasi penuh pada 4 op-amp yang ada didalamnya atau kita dapat pula hanya menggunakan setengahnya Yang terpenting adalah tegangan power supply harus tetap tersambung dan tersupply menggunakan tegangan 3-5 volt dc yang stabil.
E. SWITCH LINE
Switched line adalah tautan komunikasi yang dibangun melalui penggunaan peralatan switching yang memungkinkan koneksi dibuat antara dua perangkat transmisi. Switched line menyediakan koneksi sementara antara dua terminal pengguna atau mesin dan hanya berlangsung selama periode tertentu. Switched lines meminimalkan biaya lini dengan tetap
13 mempertahankan keunggulan sistem yang saling berhubungan. Mereka lebih murah dibandingkan dengan leased line dan sering tepat ketika ada lalu lintas rendah, serta untuk menghubungkan beberapa situs jarak jauh. Switched lines umumnya digunakan untuk sistem telepon suara biasa di mana perusahaan telepon menyimpan jalur fisik yang sudah ada antara penelepon dan nomor yang dipanggil. Pemesanan berlangsung sepanjang panggilan dan tidak ada orang lain yang dapat menggunakan garis fisik terkait selama waktu ini.
Perangkat switching seperti private branch network (PBX) sering digunakan dalam suatu organisasi untuk memberi pengguna kemampuan untuk berbagi sejumlah saluran telepon eksternal langsung dari ekstensi mereka. PBX memungkinkan pengguna untuk mengakses dan berbagi beberapa garis eksternal, dan karenanya menghilangkan kebutuhan untuk menetapkan masing-masing pengguna garis individual.
Keuntungan dari switched line adalah:
Biaya rendah, terutama jika ada penggunaan yang rendah atau lalu lintas antar terminal
Menyediakan sarana untuk mengakses dan menghubungkan beberapa mesin yang jauh
Fleksibilitas karena banyak mesin yang menawarkan layanan berbeda dapat diakses.
Setelah kerusakan terjadi pada koneksi ke fasilitas, pengguna atau mesin dapat memanggil ulang dan mendapatkan rute alternatif ke fasilitas.
3. Tes formatif
Pilihlah satu jawaban yang paling tepat dari berbagai alternatif jawaban berikut ini!
1. Sensor yang paling umum digunakan pada robot line follower adalah?
a. Sensor suara b. Sensor cahaya c. Sensor sentuhan d. Sensor getaran
2. Komponen utama yang mengatur gerakan robot sesuai dengan informasi dari sensor pada line follower adalah?
a. Mikrokontroler b. Baterai
c. Motor DC
d. Sensor infra-merah
3. Fungsi dari sensor pada robot line follower adalah?
a. Mengatur kecepatan robot b. Mengontrol arah gerak robot c. Memberikan energi pada motor d. Mengeluarkan suara peringatan
14 4. Penggunaan PID Controller pada robot line follower berguna untuk?
a. Mengatur kecepatan motor b. Menstabilkan gerakan robot c. Menyambungkan sensor d. Mengontrol catu daya
5. Komponen yang memungkinkan robot line follower berinteraksi dengan lingkungannya secara nirkabel adalah?
a. Bluetooth module b. Transistor
c. Resistor d. Kapasitor
6. Keuntungan menggunakan motor DC pada robot line follower adalah?
a. Konsumsi daya yang tinggi b. Sulit dikontrol
c. Ringan dan mudah dikendalikan d. Tidak cocok untuk aplikasi mobile
7. Bagian dari mikrokontroler yang berperan dalam memori penyimpanan program pada robot adalah?
a. CPU b. RAM c. ROM d. EEPROM
8. Kelebihan menggunakan sensor infra-merah pada robot line follower adalah?
a. Akurasi yang rendah
b. Rentan terhadap cahaya matahari
c. Tanggapan cepat terhadap perubahan warna d. Hanya dapat digunakan di lingkungan gelap
9. Parameter yang penting untuk diperhatikan dalam pembuatan lintasan pada kompetisi robot line follower adalah?
a. Warna lintasan b. Panjang robot c. Bentuk roda d. Lebar lintasan
10. Komponen yang berfungsi untuk menjaga agar robot tetap berada pada lintasan yang ditentukan adalah?
a. Servo motor
b. Sensor line follower c. Sensor ultrasonik d. LED
15 4. Job sheet
1. Tujuan: Mahasiswa dapat mengontrol motor DC dua arah 2. Dasar Teori
Dalam aplikasinya seringkali sebuah motor digunakan untuk arah yang searah dengan jarum jam maupun sebaliknya. Untuk mengubah putaran dari sebuah motor dapat dilakukan dengan mengubah arah arus yang mengalir melalui motor tersebut. Secara sederhana seperti yang ada pada gambar 1, hal ini dapat dilakukan hanya dengan mengubah polaritas tegangan motor.
Berdasarkan Gambar diatas, proses kendali arah putar motor ditentukan oleh logika dari 2 pin (pin 0 dan pin 1), dimana agar motor tersebut bekerja, maka kondisi pin 0 dan pin 1 harus saling berbeda logika. Motor akan berhenti apabila keduanya berlogika 0. Berikut adalah kondisi motor berdasarkan logika pada pin 0 dan pin 1:
3. Alat dan Bahan 1) Satu Robot beroda 2) Satu Kabel Power 3) Satu Kit Programmer 4) Satu Kabel ISP 5) Dua Kabel Data 6) Aplikasi Bascom
7) Aplikasi AVR Programmer 8) Driver USB Prolific
9) Satu Kit I/0
10) Satu power supply
16 4. Rangkaian Alat
5. Langkah Kegiatan
1) Rangkai alat dan bahan seperti pada poin gambar.
2) Hubungkan kit Programmmer ke port ISP pada robot beroda dan jalankan aplikasi AVR Programmer.
3) Atur chip aplikasi AVR Programmer sesuai dengan jenis mikrokontroller pada robot beroda. Serta atur crystal sesuai dengan crystal pada mikrokontroller yang digunakan pada robot beroda.
4) Carilah file .HEX yang dibuat pada Praktikum 1.1 dan kemudian upload ke dalam mikrokontroller dengan menekan tombol “WRITE”
pada aplikasi AVR Programmer.
5) Cek arah perputaran robot beroda, jika arah perputaran ke belakang (mundur) maka putar balik pin motor DC (M).
6) Cek susunan gerabox pada robot beroda, dan tentukan nilai torsinya.
7) Dengan menggunakan stopwatch, hitung waktu(t) yang dibutuhkan robot beroda untuk menempuh bidang lurus sepanjang 2 meter.
8) Dengan menggunakan stopwatch, hitung waktu(t) yang dibutuhkan robot beroda untuk menempuh bidang miring 30° sepanjang 1 meter.
9) Berdasarkan hasil yang didapat pada poin 7 dan 8, hitung kecepatan linier (m/s), kecepatan sudut (rpm) motor DC, dan daya.
10) Ubah susunan gearbox dan tentukan nilai torsinya.
11) Dengan menggunakan stopwatch, hitung waktu(t) yang dibutuhkan robot beroda untuk menempuh bidang lurus sepanjang 2 meter.
12) Dengan menggunakan stopwatch, hitung waktu(t) yang dibutuhkan robot beroda untuk menempuh bidang miring 30° sepanjang 2 meter.
13) Berdasarkan hasil yang didapat pada poin 11 dan 12, hitung kecepatan linier (m/s), kecepatan sudut (rpm) motor DC, dan daya.
14) Bandingkan hasil yang didapat pada poin 11 dan 12
17 6. Pengujian Pemahaman
1) Bagaimana hubungan torsi terhadap kecepatan dan jenis lintasan?
2) Mengapa ukuran setiap gear berbeda dan bagaimana pengaruh ukuran gear terhadap kecepatan dan percepatan?
3) Ubah susunan gear box dan nilai pwm sehingga menghasilkan kecepatan paling efektif untuk berbagai kondisi jalan (datar, menanjak, dan menurun)
18 B. Kompetensi 2: Membuat rangkaian elektronik robot
1. Indikator
1. Kesesuaian dengan spesifikasi, rangkaian elektronik yang dibuat sesuai dengan spesifikasi teknis dan desain yang telah ditentukan sebelumnya.
2. Memastikan bahwa semua fungsi utama robot dapat diaktifkan dan beroperasi sebagaimana mestinya.
3. Menguji stabilitas dan keandalan rangkaian dalam berbagai kondisi operasional untuk memastikan kinerjanya yang konsisten
4. Menilai sejauh mana rangkaian dapat dirakit dengan mudah dan dipelihara oleh pengguna yang mungkin memiliki tingkat keahlian yang berbeda.
2. Uraian materi
1. Komponen Line Follower
a) Komponen Utama Line Follower Robot
Komponen-komponen pada rangkaian Line Follower terdiri dari : 1) Resistor
Penggunaan resistor dalam rangkaian berfungsi sebagai penghambatarus listrik, memperkecil arus dan membagi arus listrik dalam suatu rangkaian. Satuan yang dipakai untuk menentukan besar kecilnya nilai resistor adalah Ohm atau disingkat dengan Ω (Omega).
2) Transistor
Transistor adalah suatu bahan yang dapat merubah bahan yang tidak dapat menghantarkan arus listrik menjadi bahan penghantar atau setengah menghantar arus listrik. Sifat ini disebut bahan semikonduktor
3) LED (Light Emiting Diode) dan LED Superbright
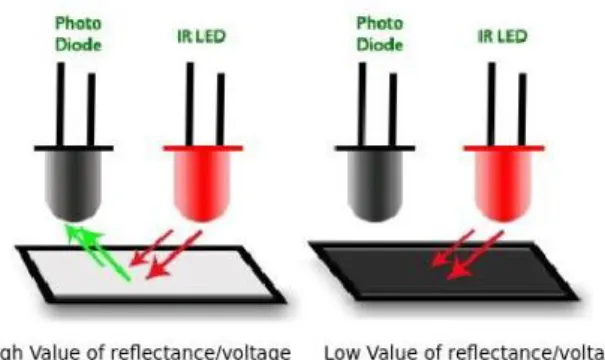
LED biasa berfungsi sebagai lampu indikator pada saat sensor bekerja, dan bekerja pada bias forward. LED Superbright berfungsi sebagai pengirim cahaya
ke garis untuk dibaca sensor. Kerjanya ketika sumber tegangan masuk pada battery on, maka arus masuk sehinnga Led superbrigth menyala dengan terang yang kemudian dibiaskan pada photodioda
4) IC (Integrated Circuit)
Komponen IC memilki bentuk fisik kecil, terbuat dari bahan Silikon dan berwarna hitam. Komponen IC memiliki banyak kaki dan pada umumnya jumlah
19 kakinya sangat tergantung dari banyaknya komponen yang membentuk komponen IC tersebut. Letak kaki-kaki disusun dalam bentuk dua baris atau Dual In Line (DIL).
IC yang digunakan adalah IC LM 324. IC disini digunakan sebagai komparator. Yaitu membandingkan antara tegangan input dari sensor dengan tegangan input dari variable resistor.
Pulsa outputnya adalah high sehingga tidak diperlikan adanya pull-up pada rangkaian output.
5) Motor Penggerak (Dinamo
Motor adalah komponen yang mengubah energi listrik menjadi energi mekanik, dalam kasus perancangan robot, umumnya digunakan motor DC, karena jenis motor tersebut mudah untuk dikendalikan.
Kecepatan yang dihasilkan oleh motor DC berbanding lurus dengan potensial yang diberikan. Untuk membalik arah putarnya cukup membalik polaritas yang diberikan.
Gambar 2.1 Komponen Robot Line Fllower Analog
b) SPESIFIKASI:
Menggunakan IC Komparator
Tidak menggunakan Program
Tidak menggunakan LCD Display
Pengaturan sensor dengan putaran (VR)
Jumlah sensor lebih sedikit
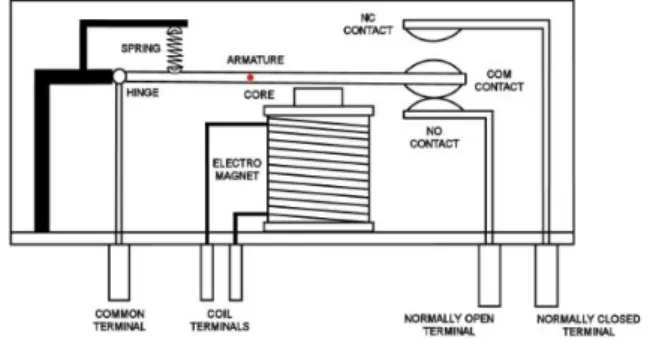
Menggunakan relay untuk kendali motor
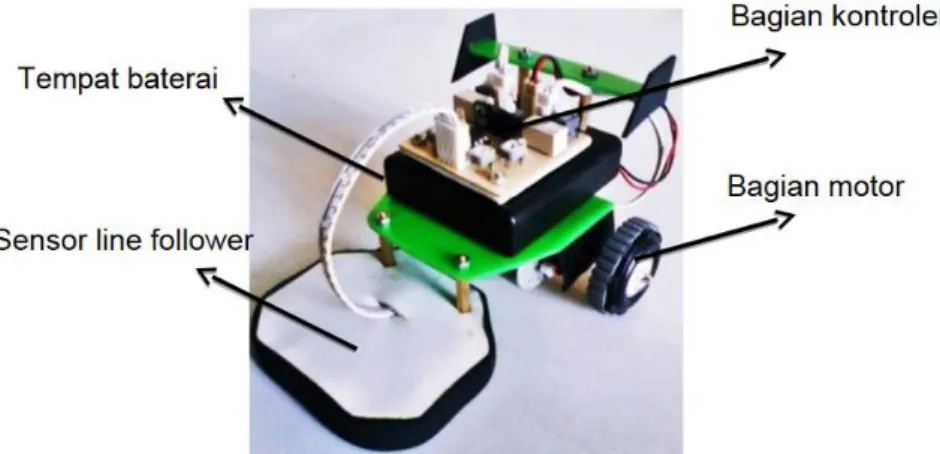
20 c) Bagian-bagian Robot Line Follower Analog
Gambar 2.2 Bagian Robot Line Follower Analog d) Bagian sensor
Gambar 2.2 Bagian sensor Robot Line Follower Analog 2. Rangkaian Line Follower Analog
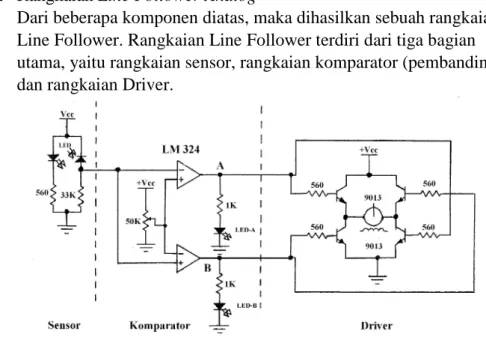
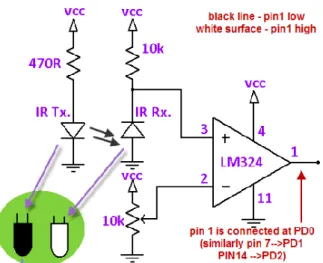
Dari beberapa komponen diatas, maka dihasilkan sebuah rangkaian Line Follower. Rangkaian Line Follower terdiri dari tiga bagian utama, yaitu rangkaian sensor, rangkaian komparator (pembanding) dan rangkaian Driver.
Gambar 2.1 Rangkaian Line Follower
21 Gambar 2.2 Rangkaian Control Line Follower
Gambar 2.3 Rangkaian Control Putaran Motor
Gambar 2.4 Board Control Line Follower
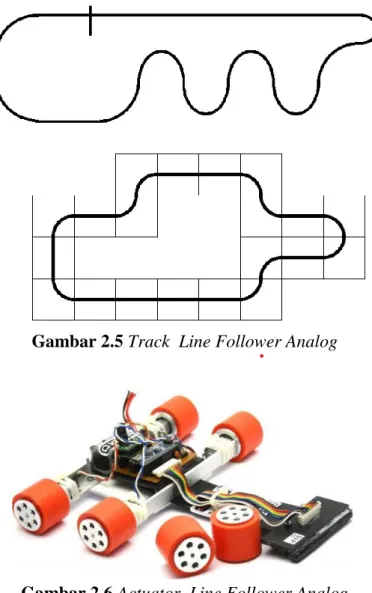
22 Gambar 2.5 Track Line Follower Analog
Gambar 2.6 Actuator Line Follower Analog
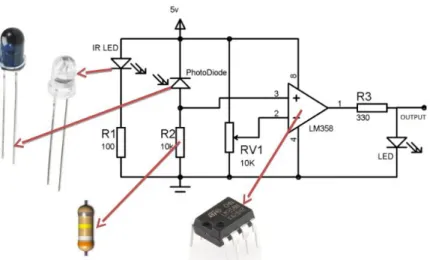
Gambar 2.7 LED dan Photodiode
23 Gambar 2.8 Operasional Amplifier
Gambar 2.8 Rangkaian Baterai 3. Langkah Cara Kerja Rangkaian
a) Inisialisasi
Robot diatur di awal jalur yang ingin diikuti. Sensor cahaya ditempatkan di bawah robot sehingga dapat mendeteksi tingkat kecerahan di sekitarnya
b) Pengukuran sensor
Sensor cahaya terus-menerus mengukur tingkat kecerahan di bawah robot. Ketika sensor mendeteksi perbedaan kecerahan antara jalur dan latar belakang, informasi ini dikirim ke mikrokontroler.
24 c) Proses pembacaan dan keputusan
Mikrokontroler membaca sinyal dari sensor dan mengambil keputusan berdasarkan aturan tertentu. Misalnya, jika sensor kiri mendeteksi latar belakang, sedangkan sensor kanan mendeteksi jalur, robot perlu menggerakkan dirinya ke kanan untuk kembali ke jalur.
d) Aksi pergerakan
Berdasarkan keputusan mikrokontroler, motor diatur untuk menggerakkan roda sehingga robot mengikuti jalur yang diinginkan. Misalnya, jika robot harus bergerak ke kiri, motor di sebelah kanan diperlambat atau dihentikan, sedangkan motor di sebelah kiri tetap bergerak
e) Looping
Proses pengukuran, pembacaan, dan pengambilan keputusan berulang secara terus-menerus, membuat robot secara dinamis menyesuaikan gerakannya untuk terus mengikuti jalur yang ditentukan
3. Tes formatif
1. Komponen dalam pembuatan robot line tracer analog yang berfungsi menyimpan arus listrik adalah...
A. Transistor B. Resistor C. Kapasitor D. Transformator E. Dioda
2. Berikut komponen yang termasuk dalam robot line tracer, kecuali...
A. Transistor B. Dioda C. Kapasitor
D. Integrated Circuit E. Konduktor
3. Komponen pada rangkaian robot line tracer yang berfungsi mengubah energi listrik menjadi mekanik adalah...
A. Motor B. Transistor C. Dioda D. Resistor E. Transformator
4. Proses yang terjadi dengan pengambilan keputusan berulang secara terus menerus untuk penyesuaian gerakan robot disebut...
A. Pengukuran sensor
25 B. Looping
C. Aksi Pergerakan
D. Proses pembacaan dan keputusan E. Pembuatan Skema
5. Komponen dalam pembuatan robot line tracer yang berfungsi sebagai saklar atau Switch adalah....
A. Resistor B. Kapasitor C. Transformator D. Transistor E. Photodioda
6. Simbol komponen dibawah ini adalah
A. LED B. Didoa C. Kapasitor D. Resistor E. Transistor
7. Berapa nilai resistor berikut.
A. 33K B. 100 ohm C. 330 ohm D. 1k E. 10k
8. Sensor yang biasa di gunakan untuk robot line tracer adalah....
A. Photodioda B. Ultrasonik C. Infrared D. Asap
E. Kelembaban
9. Berikut bagian utama pada robot line tracer, kecuali...
A. Rangkaian sensor
B. Rangkaian komparator (pembanding) C. Rangkaian Driver
D. Rangkaian Sensor dan Komparator E. Rangkaian daya
10. Perhatikan simbol komponen berikut
26 Gambar tersebut simbol dari komponen?
A. Dioda B. Kapasitor C. Resistor D. Transistor E. IC
4. Job sheet
RANGKAIAN LINE TRACER ANALOG A. TUJUAN
Mampu membuat rangkaian robot menggunakan IC LM324
Mampu membuat robot dengan input 4 sensor B. DASAR TEORI
a) Resistor
Resistor atau hambatan banyak dipakai pada teknik listrik dan elektronika. Resistor dibuat dengan berbagai cara, misalnya ada yang dibuat dari kawat tertentu (misalnya nikelin) yang digulung sedemikian rupa dalam suatu kerangka (gambar 1). Resisotor jenis ini tahan terhadap temperatur tinggi sehingga digunakan untuk instalasi arus yang besar.
Selain jenis kawat gulung, ada juga resistor yang dibuat dari keramik (semacam tanah liat) atau dari karbon yang disemprotkan pada keramik.
Resistor semacam ini kurang tahan terhadap temperatur sehingga hanya digunakan untuk arus yang kecil-kecil (alat-alat elektronika) seperti gambar 2.
Dilihat dari konduksinya, ada resistor yang dapat diatur harga ohmnya dan ada yang tidak. Resistor yang dapat diatur disebut variabel resistor atau bisa juga disebut potensiometer (Gambar 3). Sedangkan resistor yang tidak dapat diatur disebut fixed resistor.
27 b) Kapasitor
Kapasitor atau juga sering disebut kondensator adalah sebuah komponen elektronika yang dapat menyimpan energi listrik dalam bentuk muatan listrik dalam waktu tertentu tanpa disertai reaksi kimia.
Sebuah kapsitor terdiri dari 2 konduktor yang disekat oleh sebuah nonkonduktor. Kedua konduktor tersebut disebut elektroda dan non konduktor disebut dielektrika. Terlihat pada gambar di bawah ini :
Jenis-jenis kapasitor sebagai berikut : 6. Kapasitor Kertas
7. Kapasitor Keramik 8. Kapasitor Elektrolit(elco)
9. Kapasitor udara (Kapasitor Variabel) sering disebut Varco.
10. Kapasitor Plastik
Kapasitor dibedakan menjadi 2 kategori, yaitu kapasitor terkutub (polar) dan tidak terkutup (nonpolar). Perbedaan polar dan nonpolar
28 adalah pada kapasitor polar memiliki 2 kutup anoda (+) dan katoda (-) yang menunjukkan bahwa pemasangan kapasitor polar pada rangkaian listrik tidak boleh terbalik antara potensial + dan – rangkaian, Sedangkan kapasitor nonpolar tidak terkutub dan dapat dihubungkan dengan rangkaian listrik (sumber muatan listrik) secara sembarang.
c) Diode
Dioda merupakan komponen penting dalam elektronika. Dalam skema rangkaian, dioda dilambangkan. Dari lambang sudah dilihat bahwa arah arus mempengaruhi sifat dari dioda. Satu sisi dari dioda disebut anoda, yang lain katoda. Katoda ada pada ujung depan dari segitiga. Komponen dioda sering berbentuk silinder kecil dan biasanya diberi lingkaran pada katoda untuk menunjukkan posisi garis dalam lambang.
Dioda mengijinkan arus untuk mengalir ke satu arah saja. Ketika anoda mendapatkan voltase yang lebih positif dari pada katoda, maka arus bisa mengalir dengan bebas. Dalam situasi ini dikatakan dioda bias maju. Kalau voltase dibalikkan, berarti katoda positif terhadap anoda, arus tidak bisa mengalir kecuali suatu arus yang sangat kecil. Dalam situasi ini dikatakan dioda dibias balik atau dibias mundur. Arus yang mengalir ketika dioda dibias balik disebut arus balik atau arus bocor dari dioda dan arus itu begitu kecil sehingga dalam kebanyakan rangkaian bisa diabaikan. Supaya arus bisa mengalir ke arah maju, voltase harus sebesar ≈0,7V pada dioda Si/ Silicon(yang biasa ada di pasaran) dan
≈0,3V pada dioda Ge (Germanium) dan voltase/tegangan lebih besar lagi untuk LED. LED (Light Emiting Diode) merupakan dioda yang dapat memancarkan cahaya seperti halnya lampu, akan tetapi prinsif kerjanya seperti dioda biasa. LED pada umumnya digunakan sebagai lampu indikator pada rangkaian elektronik. Photo Dioda merupakan dioda yang memiliki resistansi/tahanan dalam yang tahanan tersebut dapat berubah- ubah ketika mendapatkan cahaya dari luar. Dioda Zener merupakan satu jenis khusus yang juga bisa mengalirkan arus ke arah sebaliknya. Sifat dioda sama seperti dioda biasa, hanya dioda Zener dirancang untuk memiliki voltase break through pada voltase tertentu. Biasanya dioda
29 zener dipakai pada arah balik sehingga voltase pada dioda ini konstan sebesar voltase zenernya.
d) IC LM324N
IC lm324 adalah sebuah semikonduktor yang berbentuk ic yang diperuntukkan sebagai komponen enguat sederhana, dan banyak aplikasi lainnya. C LM 324 banyak digunakan dalam rangkaian penguat sederhana dengan daya kecil, maupun rangkaian audio karena mempunyai banyak keunggulan. Salah satunya adalah bentuk yang ringkas, kinerja bagus sehingga memudahkan kita melakukan pembuatan rangkaian yang simpel, ringkas, dan sederhana ketimbang menggunakan transistor yang memungkinkan penggunaan dalam jumlah lebih banyak.
LM324 juga banyak ditemukan pada rangkaian power supply yang memerlukan tegangan stabil dan kepraktisan, ini memungkinkan penempatan power supply dengan bentuk lebih simpel dan kecil. IC LM324 menghemat penggunaan tegangan dc karena bisa bekerja pada tegangan rendah antara 3 hingga 5 volt dengan tingkat kestabilan yang bagus. Untuk lebih jelasnya mengenai kegunaan IC LM324, berikut kami berikan beberapa poin fungsinya yang paling umum dijumpai:
6. Sebagai penguat audio
7. Sebagai rectifier pada power supply
8. Sebagai komponen utama pada rangkaian oscillator 9. Sebagai komponen pada rangkaian komparator 10. Untuk penguat awal atau pre-amp
Bentuk IC LM324 adalah komponen semikonduktor dengan berbentuk kotak dengan 14 pin sebagai kaki yang terhubung dengan pcb.
Masing-masing pin mempunyai fungsi berbeda, ini memberikan penjelasan bagaimana sebuah ic yang berisi 4 op-amp mampu memberikan banyak fungsi menarik yang dikemas dalam 1 semikonduktor. Sehingga kegunaannya yang luas dapat memudahkan kita dalam membuat rangkaian elektronika yang simpel dan mudah dioperasikan.
Berikut bagan dalam IC LM324:
30 Pada gambar diatas kita dapat melihat bagaimana masing-masing pin pada IC LM324 mempunyai fungsi berbeda. Yang memberikan pilihan untuk kita menggunakan aplikasi penuh pada 4 op-amp yang ada didalamnya atau kita dapat pula hanya menggunakan setengahnya Yang terpenting adalah tegangan power supply harus tetap tersambung dan tersupply menggunakan tegangan 3-5 volt dc yang stabil.
e) SWITCH LINE
Switched line adalah tautan komunikasi yang dibangun melalui penggunaan peralatan switching yang memungkinkan koneksi dibuat antara dua perangkat transmisi. Switched line menyediakan koneksi sementara antara dua terminal pengguna atau mesin dan hanya berlangsung selama periode tertentu. Switched lines meminimalkan biaya lini dengan tetap mempertahankan keunggulan sistem yang saling berhubungan. Mereka lebih murah dibandingkan dengan leased line dan sering tepat ketika ada lalu lintas rendah, serta untuk menghubungkan beberapa situs jarak jauh. Switched lines umumnya digunakan untuk sistem telepon suara biasa di mana perusahaan telepon menyimpan jalur fisik yang sudah ada antara penelepon dan nomor yang dipanggil.
Pemesanan berlangsung sepanjang panggilan dan tidak ada orang lain yang dapat menggunakan garis fisik terkait selama waktu ini. Perangkat switching seperti private branch network (PBX) sering digunakan dalam suatu organisasi untuk memberi pengguna kemampuan untuk berbagi sejumlah saluran telepon eksternal langsung dari ekstensi mereka. PBX memungkinkan pengguna untuk mengakses dan berbagi beberapa garis eksternal, dan karenanya menghilangkan kebutuhan untuk menetapkan
31 masing-masing pengguna garis individual.
Keuntungan dari switched line adalah:
Biaya rendah, terutama jika ada penggunaan yang rendah atau lalu lintas antar terminal
Menyediakan sarana untuk mengakses dan menghubungkan beberapa mesin yang jauh
Fleksibilitas karena banyak mesin yang menawarkan layanan berbeda dapat diakses.
Setelah kerusakan terjadi pada koneksi ke fasilitas, pengguna atau mesin dapat memanggil ulang dan mendapatkan rute alternatif ke fasilitas.
C. ALAT DAN BAHAN
32 D. LANGKAH KERJA
Susun dan rangkailah rangkaian diatas
Buat seperti gambar dibawah ini:
33
Jika sudah selesai ujilah robot menggunakan circuit dengan lebar jalur htiam 2.5 cm seperti dibawah ini:
Demonstrasilah di depan guru
Amati dan catat apa yang telah terjadi E. LEMBAR KERJA
Apakah robot berjalan dengan baik ? ya/tidak F. KESIMPULAN
34 C. Kompetensi 3: Analisa rangkaian elektronik robot
1. Indikator
1.
Mampu menjelaskan prinsip kerja rangkaian robot2.
Mampu menjelaskan fungsi konponen pada robot3.
Mampu menjelaskan hubungan antara rangkaian sensor, control dan motor pada robot2. Uraian materi
Dua pembanding IC LM 324 digunakan untuk menghasilkan 2 output yang nilainya berlawanan. Apabila Output IC 1a adalah 1, maka Output IC 1b adalah 0 dan begitu pun sebaliknya. Dua output berlawanan ini digunakan sebagai Input untuk Driver Transistor yang dirangkai dengan konfigurasi jembatan H atau H-Bridge Driver.
Driver Jembatan-H atau H-Bridge adalah rangkaian driver menggunakan transistor yang dirangkai menyerupai sambungan jembatan.
Dalam artian, Motor DC akan berputar apabila 2 buat transistor yang saling bersinggungan aktif sehingga membuka jalan agar arus listrik dapat mengalir dari VCC ke ground melalui Motor DC. Konfigurasi jembatan H dapat dilihat pada gambar dibawah :
Transistor ibaratnya sebuah saklar. Pada keadaan normal, tidak ada saklar yang aktif sehingga tidak ada arus dari VCC ke Ground melalui motor. Pada saat driver menerima sinyal dari komparator, maka saklar yang bersinggungan akan saling terhubung, arus mengalir melalui motor sehingga berputar searah jarum jam atau CW. Ketika logika input berubah, maka Arus dari VCC dan ground berpindah pada arah berlawanan, sehingga mengubah putaran motor menjadi CCW
35 3. Tes formatif
1. Sensor yang diaplikasikan pada Robot Line Follower (RTC) kebanyakan menggunakan sensor ....
a. Phototransistor b. Thermostat c.Photodioda
d. RTD e. Thermokopel
2. Microkontroler AT89S51 untuk catu dayanya dihubungkan dengan kaki berapa?
a. 10-40 b.15.40 c. 20-40
d.25-40 e.30-40
3. Jenis komponen yang bisa digunakan untuk membuat rangkaian driver motor, kecuali……
a.IC L293 D b. relay c. mosfet d. transistor e. IC LM324
4. Perangkat pendukung robot industri secara umum dapat dikelompokan dalam 4 bagian yaitu ...
a. Program, Sensor, Aktuator, dan Kontroler b. Motor, Sensor, Aktuator, dan Kontroler
c. Manipulator, Processor, Aktuator, dan Kontroler d. Manipulator, Sensor, Aktuator, dan Kontroler e. Manipulator, Sensor, Aktuator, dan Monitor
5. Dalam system control robotic sistem kontrol yang outputnya tidak diperhitungkan ulang oleh kontroler merupakan kontrol....
a. Loop terbuka b. Loop tertutup c. Loop umpan balik d. Forward Loop e. Feedback Loop
6. Dari IC driver Motor Follower manakah yang merupakan komponen utama driver Motor Line Follower ....
a. L298 b. 1N4001 c. LM341
d. LM7805 e. LM741
7. Alat yang dapat memberi informasi terus menerus kepada kontroler robot mengenai posisi, kecepatan, dan akselerasi dari setiap batang-hubung (link) yang bisa diumpan balik ke unit kontroler sehingga sistem dapat dikendalikan dengan tepat adalah….
a. Konversi daya d. Sensor b. Kontroler e. Manipulator c. Rigid
8. Pada sensor garis komponen elektronik yang berfungsi sebagai media receiver adalah….
a. IC d. Transistor
b. Photodioda e. LED c. Diode
9. Sensor cahaya yang dapat mengubah perubahan besaran optik (cahaya) menjadi perubahan tegangan...
a. Photovoltaic d. RTD
b. Photoconductive e. Thermokopel
36 c. NTC
10. Sensor yang berfungsi untuk membaca pergerakan garis lurus, secara linear adalah ...
a. Thermostat d. Thermokopel b. LVDT e. Strain Gauge
c. LDR
4. Job sheet
RANGKAIAN LINE TRACER ANALOG A. TUJUAN
Mampu membuat rangkaian robot menggunakan IC LM324
Mampu membuat robot dengan input 4 sensor
Mampu menjelaskan prinsip kerja rangkaian robot B. DASAR TEORI
a) Resistor
Resistor atau hambatan banyak dipakai pada teknik listrik dan elektronika. Resistor dibuat dengan berbagai cara, misalnya ada yang dibuat dari kawat tertentu (misalnya nikelin) yang digulung sedemikian rupa dalam suatu kerangka (gambar 1). Resisotor jenis ini tahan terhadap temperatur tinggi sehingga digunakan untuk instalasi arus yang besar.
Selain jenis kawat gulung, ada juga resistor yang dibuat dari keramik (semacam tanah liat) atau dari karbon yang disemprotkan pada keramik.
Resistor semacam ini kurang tahan terhadap temperatur sehingga hanya digunakan untuk arus yang kecil-kecil (alat-alat elektronika) seperti gambar 2.
Dilihat dari konduksinya, ada resistor yang dapat diatur harga ohmnya dan ada yang tidak. Resistor yang dapat diatur disebut variabel resistor atau bisa juga disebut potensiometer (Gambar 3). Sedangkan resistor
37 yang tidak dapat diatur disebut fixed resistor.
b) Kapasitor
Kapasitor atau juga sering disebut kondensator adalah sebuah komponen elektronika yang dapat menyimpan energi listrik dalam bentuk muatan listrik dalam waktu tertentu tanpa disertai reaksi kimia.
Sebuah kapsitor terdiri dari 2 konduktor yang disekat oleh sebuah nonkonduktor. Kedua konduktor tersebut disebut elektroda dan non konduktor disebut dielektrika. Terlihat pada gambar di bawah ini :
Jenis-jenis kapasitor sebagai berikut : 11. Kapasitor Kertas
12. Kapasitor Keramik 13. Kapasitor Elektrolit(elco)
14. Kapasitor udara (Kapasitor Variabel) sering disebut Varco.
15. Kapasitor Plastik
38 Kapasitor dibedakan menjadi 2 kategori, yaitu kapasitor terkutub (polar) dan tidak terkutup (nonpolar). Perbedaan polar dan nonpolar adalah pada kapasitor polar memiliki 2 kutup anoda (+) dan katoda (-) yang menunjukkan bahwa pemasangan kapasitor polar pada rangkaian listrik tidak boleh terbalik antara potensial + dan – rangkaian, Sedangkan kapasitor nonpolar tidak terkutub dan dapat dihubungkan dengan rangkaian listrik (sumber muatan listrik) secara sembarang.
c) Diode
Dioda merupakan komponen penting dalam elektronika. Dalam skema rangkaian, dioda dilambangkan. Dari lambang sudah dilihat bahwa arah arus mempengaruhi sifat dari dioda. Satu sisi dari dioda disebut anoda, yang lain katoda. Katoda ada pada ujung depan dari segitiga. Komponen dioda sering berbentuk silinder kecil dan biasanya diberi lingkaran pada katoda untuk menunjukkan posisi garis dalam lambang.
Dioda mengijinkan arus untuk mengalir ke satu arah saja. Ketika anoda mendapatkan voltase yang lebih positif dari pada katoda, maka arus bisa mengalir dengan bebas. Dalam situasi ini dikatakan dioda bias maju. Kalau voltase dibalikkan, berarti katoda positif terhadap anoda, arus tidak bisa mengalir kecuali suatu arus yang sangat kecil. Dalam situasi ini dikatakan dioda dibias balik atau dibias mundur. Arus yang mengalir ketika dioda dibias balik disebut arus balik atau arus bocor dari dioda dan arus itu begitu kecil sehingga dalam kebanyakan rangkaian bisa diabaikan. Supaya arus bisa mengalir ke arah maju, voltase harus sebesar ≈0,7V pada dioda Si/ Silicon(yang biasa ada di pasaran) dan
≈0,3V pada dioda Ge (Germanium) dan voltase/tegangan lebih besar lagi untuk LED. LED (Light Emiting Diode) merupakan dioda yang dapat memancarkan cahaya seperti halnya lampu, akan tetapi prinsif kerjanya seperti dioda biasa. LED pada umumnya digunakan sebagai lampu indikator pada rangkaian elektronik. Photo Dioda merupakan dioda yang memiliki resistansi/tahanan dalam yang tahanan tersebut dapat berubah- ubah ketika mendapatkan cahaya dari luar. Dioda Zener merupakan satu jenis khusus yang juga bisa mengalirkan arus ke arah sebaliknya. Sifat
39 dioda sama seperti dioda biasa, hanya dioda Zener dirancang untuk memiliki voltase break through pada voltase tertentu. Biasanya dioda zener dipakai pada arah balik sehingga voltase pada dioda ini konstan sebesar voltase zenernya.
d) IC LM324N
IC lm324 adalah sebuah semikonduktor yang berbentuk ic yang diperuntukkan sebagai komponen enguat sederhana, dan banyak aplikasi lainnya. C LM 324 banyak digunakan dalam rangkaian penguat sederhana dengan daya kecil, maupun rangkaian audio karena mempunyai banyak keunggulan. Salah satunya adalah bentuk yang ringkas, kinerja bagus sehingga memudahkan kita melakukan pembuatan rangkaian yang simpel, ringkas, dan sederhana ketimbang menggunakan transistor yang memungkinkan penggunaan dalam jumlah lebih banyak.
LM324 juga banyak ditemukan pada rangkaian power supply yang memerlukan tegangan stabil dan kepraktisan, ini memungkinkan penempatan power supply dengan bentuk lebih simpel dan kecil. IC LM324 menghemat penggunaan tegangan dc karena bisa bekerja pada tegangan rendah antara 3 hingga 5 volt dengan tingkat kestabilan yang bagus. Untuk lebih jelasnya mengenai kegunaan IC LM324, berikut kami berikan beberapa poin fungsinya yang paling umum dijumpai:
11. Sebagai penguat audio
12. Sebagai rectifier pada power supply
13. Sebagai komponen utama pada rangkaian oscillator 14. Sebagai komponen pada rangkaian komparator 15. Untuk penguat awal atau pre-amp
Bentuk IC LM324 adalah komponen semikonduktor dengan berbentuk kotak dengan 14 pin sebagai kaki yang terhubung dengan pcb.
Masing-masing pin mempunyai fungsi berbeda, ini memberikan penjelasan bagaimana sebuah ic yang berisi 4 op-amp mampu memberikan banyak fungsi menarik yang dikemas dalam 1 semikonduktor. Sehingga kegunaannya yang luas dapat memudahkan kita dalam membuat rangkaian elektronika yang simpel dan mudah dioperasikan.
Berikut bagan dalam IC LM324:
40 Pada gambar diatas kita dapat melihat bagaimana masing-masing pin pada IC LM324 mempunyai fungsi berbeda. Yang memberikan pilihan untuk kita menggunakan aplikasi penuh pada 4 op-amp yang ada didalamnya atau kita dapat pula hanya menggunakan setengahnya Yang terpenting adalah tegangan power supply harus tetap tersambung dan tersupply menggunakan tegangan 3-5 volt dc yang stabil.
e) SWITCH LINE
Switched line adalah tautan komunikasi yang dibangun melalui penggunaan peralatan switching yang memungkinkan koneksi dibuat antara dua perangkat transmisi. Switched line menyediakan koneksi sementara antara dua terminal pengguna atau mesin dan hanya berlangsung selama periode tertentu. Switched lines meminimalkan biaya lini dengan tetap mempertahankan keunggulan sistem yang saling berhubungan. Mereka lebih murah dibandingkan dengan leased line dan sering tepat ketika ada lalu lintas rendah, serta untuk menghubungkan beberapa situs jarak jauh. Switched lines umumnya digunakan untuk sistem telepon suara biasa di mana perusahaan telepon menyimpan jalur fisik yang sudah ada antara penelepon dan nomor yang dipanggil.
Pemesanan berlangsung sepanjang panggilan dan tidak ada orang lain yang dapat menggunakan garis fisik terkait selama waktu ini. Perangkat switching seperti private branch network (PBX) sering digunakan dalam suatu organisasi untuk memberi pengguna kemampuan untuk berbagi sejumlah saluran telepon eksternal langsung dari ekstensi mereka. PBX memungkinkan pengguna untuk mengakses dan berbagi beberapa garis eksternal, dan karenanya menghilangkan kebutuhan untuk menetapkan
41 masing-masing pengguna garis individual.
Keuntungan dari switched line adalah:
Biaya rendah, terutama jika ada penggunaan yang rendah atau lalu lintas antar terminal
Menyediakan sarana untuk mengakses dan menghubungkan beberapa mesin yang jauh
Fleksibilitas karena banyak mesin yang menawarkan layanan berbeda dapat diakses.
Setelah kerusakan terjadi pada koneksi ke fasilitas, pengguna atau mesin dapat memanggil ulang dan mendapatkan rute alternatif ke fasilitas.
C. ALAT DAN BAHAN
42 D. LANGKAH KERJA
Susun dan rangkailah rangkaian diatas
Buat seperti gambar dibawah ini:
43
Jika sudah selesai ujilah robot menggunakan 2 circuit dengan lebar jalur htiam 2.5 cm seperti dibawah ini:
Demonstrasilah di depan guru
Amati dan catat apa yang telah terjadi E. LEMBAR KERJA
Apakah robot berjalan dengan baik ? ya/tidak
Apakah robot berbelok stabil ? ya/tidak
Apakah robot dapat bergerak dengan stabil saat melewati banyak belokan? ya/tidak
Note: coret salah satu
44 F. PERTANYAAN
apa fungsi LM324 pada rangkaian tersebut?
Bagaimana robot dapat berbelok?
Jelskan mengapa perlu adanya resistor variable?
Jelaskan mengapa perlu adanya relay pada rangkaian robot?
Jelaskan bagaimana robot tersebut bekerja secara singkat G. KESIMPULAN
45 BAB III PENUTUP
Robot line tracer adalah robot yang bergerak dengan mengikuti garis yang ditentukan dalam track.
Dalam Line Follower sendiri terdapat 3 bagian rangkaian utama, yaitu rangkaian sensor (menggunakan photo dioda sebagai sensor cahaya), komparator (menggunakan IC LM324N sebagai pembanding suatu tegangan) dan driver (digunakan sebagai penggerak roda).
Berdasarkan hasil penelitian yang didapatkan dan diselaraskan dengan tujuan penelitian maka dapat disimpulkan bahwa:
1. Modul ini memberikan peluang bagi mahasiswa untuk mendalami konsep- konsep robotika, pemrograman, dan pengembangan perangkat keras dalam konteks aplikasi praktis.
2. Modul ini memberikan dukungan pembelajaran yang lebih fleksibel dan terstruktur bagi mahasiswa. Modul ini sangat cocok digunakan pada pembelajaran mandiri melalui panduan dan sumber daya tambahan yang tersedia.
3. Melalui modul ini, mahasiswa dapat mengembangkan keterampilan praktis dalam pemrograman, perancangan perangkat keras, dan pemecahan masalah.
Modul ini juga dapat merangsang kreativitas dalam merancang solusi untuk masalah yang mungkin timbul dalam pengembangan robot.
46 DAFTAR PUSTAKA
1. M. N. Yuski, W. Hadi, and A. Saleh, “Rancang Bangun Jangkar Motor DC,” Berk.
Sainstek , vol. 5, , vol. 5, no. 2, p. 98, no. 2, p. 98, 2017, doi:
10.19184/bst.v5i2.5700.
2. Andrianto, H. (2015). Pemrograman dan Mikrokontroler AVR ATmega16.
Bandung: Informatika
3. Jaya, H. (2016). Desain dan Implementasi Sistem Robotika Berbasis Mikrokontroller. Universitas Negeri Makassar.
4. Mandas, Calvin Angel. 2019. Rancang bangun Mobile Robot berbasis pengenalan suara dengan sistem kontrol Bluetooth dan sensor Ultrasonik menggunakan Raspberry Pi. Sarjana thesis, UIN Sunan Gunung Djati Bandung, (online). (http://digilib.uinsgd.ac.id/46405/ )
5. Prabo [6] Prabowo, Y. 2013. “Apl ikasi PID pada Robot Line Follower Follower Berbasis Mikrokontroller AT-8535”. Arsitron Vol Arsitron Vol 4, No 1
6. A. P. Mathur, Introduction to Microprocessors, 24th Reprinted., McGraw- Hill Publishing Company Ltd., USA, 2006.
7. ar Publisher, 1998.
8. J. G. Keramas, Robot Technology, Delmar Publisher, 1998.
9. K. S. Fu, R. C. Gonzales, C. S. G. Lee, Robotics: Control, Sensing, Vision, and Intelligence, Mc Graw-Hill Book Company, US, 1987.
10. M. Margoilis, Arduino Cookbook, O’Reilly, USA 2011 11. M. McRoberts, Beginning Arduino, Apress, USA, 2010
12. M. Schmidt, Arduino A Quick-Start Guide, Pragmatic Programmers, USA, 2011.