1
BERBASIS MICROCONTROLLER ATMEGA16
Disusun Untuk Memenuhi Syarat Guna Memperoleh Gelar Kesarjanaan Strata Satu
Disusun Oleh :
NAMA : NENDI ARDIANSYAH LUKMAN NIM : 41405010010
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCUBUANA
SURAT PERNYATAAN
Saya yang bertanda tangan dibawah ini :
NAMA : NENDI ARDIANSYAH LUKNAN
NIM : 41405010010
FAKULTAS : TEKNOLOGI INDUSTRI
JURUSAN : TEKNIK ELEKTRO
PEMINATAN : ELEKTRONIKA
JUDUL TUGAS AKHIR : LINE FOLLOWER ROBOT PENIUP LILIN BERLENGAN SATU BERBASIS MIKROKONTROLER ATMEGA16
Dengan ini menyatakan bahwa hasil penulisan skripsi yang telah saya buat ini merupakan hasil karya sendiri dan benar keasliannya. Apabila ternyata dikemudian hari penulisan skripsi ini merupakan hasil plagiat atau penjiplakan terhadap karya orang lain, maka saya bersedia mempertanggungjawabkan sekaligus bersedia menerima sanksi berdasarkan aturan tata tertib di Universitas Mercu Buana.
Demikian pernyataan ini saya buat dalam keadaan sadar dan tanpa paksaan dari pihak manapun.
Penulis,
LEMBAR PENGESAHAN
LINE FOLLOWER ROBOT PENIUP LILIN BERLENGAN SATU BERBASIS MICROCONTROLLER ATMEGA16
DISUSUN OLEH :
NAMA : NENDI ARDIANSYAH LUKMAN NIM : 41405010010
Menyetujui, Koordinator Tugas Akhir
( Ir. Yudhi Gunardi, MT )
Pembimbing Tugas Akhir
( Fina Supegina ST, MT) Mengetahui,
Ketua Program Studi Teknik Elektro Fakultas Teknologi Industri
KATA PENGANTAR
Puji syukur penulis panjatkan ke Hadirat Allah SWT, sehingga penyusunan Tugas Akhir yang berjudul “IN LINE FOLLOWER ROBOT BERLENGAN SATU BERBASIS MIKROKONTROLER ATMEGA16 ” ini dapat terselesaikan dengan baik.
Penyusunan Tugas Akhir ini dilakukan untuk memenuhi sebagian persyaratan dalam memperoleh gelar Sarjana Teknik ( S-1 ), Universitas Mercu Buana. Mengingat masih terbatasnya kemampuan dan pengetahuan penulis, maka penulis menyadari sekali bahwa dalam penyusunan Tugas Akhir ini masih banyak kekurangan-kekurangan didalamnya. Penulis juga mengharapkan adanya suatu saran dan kritik yang bersifat membangun dari para pembaca untuk dapat dijadikan masukan dimasa yang akan datang.
UCAPAN TERIMA KASIH
Assalamu’alaikum Wr. Wb
Puji syukur penulis panjatkan ke Hadirat Allah SWT, sehingga penyusunan Tugas ini dapat terselesaikan dengan baik Dalam penyusunan Tugas Akhir ini, penulis banyak mendapatkan bantuan dari berbagai pihak, baik dalam pembuatan alat, penyajian isi, maupun teknis penulisannya. Oleh karena itu pada kesempatan ini penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya kepada :
1. Yang tercinta Bapak dan Ibu penulis yang telah membiayai penulis selama kuliah hingga lulus kuliah, memberikan dorongan dan semangat serta Do’a sehingga Tugas Akhir ini selesai dengan secepatnya dan sebaik - baiknya.
2. Ketiga adik-adikku tersayang. Hilda & Tria semoga sekolah nya lancar – lancar aja dan Jaka semoga sekripsinya cepat selesai & bisa lulus tahun ini.
3. Desi Husnita dan keluarga, terimakasih sudah banyak memberikan dorongan semangat dan do’a.
4. Ibu Fina Supegina, ST, MT selaku dosen pembimbing, terimakasih atas segala masukan, motivasi, dan kepercayaan yang diberikan
5. Bapak Ir. Yudhi Gunardi MT. selaku koordinator tugas akhir dan selaku Ka.prodi Teknik Elektro, yang juga sudah memberikan masukan dan motivasi. 6. Bapak DR. Andi Adriansyah M.Eng. yang sudah memberikan banyak masukan
dan motivasi.
7. Bapak Ir Badaruddin selaku Kepala Laboratorium Teknik Elektro
9. Bapak Nasir ST. selaku Koordinator Laboratorium Teknik Elektro yang sudah memberikan kepecayaannya atas peralatan yang digunakan selama pembuatan Proyek Tugas Akhir ini.
10. Baradista Dimas L. yang telah bayak membntu dan rela meluangkan banyak waktu, tenaga, dan pikirannya.
11. Rekan-rekan seperjuangan angkatan 2005. Zainul Irfan, Nurdin, Cahyo, Teguh, Muchlis, Anto, Revni ST, Maya, Irma, Resto, Ipul, Danu, Andri ST, Putra, Hasan, Arif, Teknik Elektro Universitas Mercubuana. “You all my best friend“
12. Seluruh teman-teman Teknik Elektro angkatan, 01, 03, 04, 07, 08, dan 09 Universitas Mercubuana
13. Tim Robot Universitas Mercubuana, semoga kedepannya bisa berprestasi.
14. Seluruh teman-teman UKM TEWKONDO Universitas Mercubuana semoga kedepannya bisa lebih baik dan lebih berprestasi.
15. Rekan-rekan ENGGRONG FAMILI TEAM & ANAJER.FC yang sampai sekarang masih tetap kompak.
16. Seluruh staff dan karyawan Universitas Mercubuana, atas sarana dan prasarana yang diberikan.
17. Thans to. B 6286 BQX dan B 6374 BUG yang sudah meringankan perjalanan penulis kemana penulis pergi
Akhir kata, tidak lupa Penulis mendoakan semoga Allah SWT membalas segala kebaikan dan pertolongan yang telah diberikan oleh Bapak dan Ibu beserta teman-teman semua yang telah membantu penulis dalam penyusunan Tugas Akhir ini, dan semoga Tugas Akhir ini dapat berguna bagi semua pihak yang membutuhkannya. Terima Kasih.
ABSTRAK
Manusia adalah makhluk yang memiliki kekurangan-kekurangan. Diantara kekurangan-kekurangan itu adalah manusia tidak dapat bekerja terus-menerus dalam jangka waktu yang lama. Selain itu, manusia juga tidak dapat bekerja pada temperatur tinggi. Sebuah solusi ditawarkan dengan cara menciptakan robot-robot yang mampu bekerja terus-menerus dalam jangka waktu yang lama. Robot-robot tertentu juga dapat bekerja pada temperatur tinggi.
Salah satu jenis robot adalah Line follower robot. Line follower robot pun ada berbagai macam jenis. Dengan berbagai macam modifikasi maka bentuk, kemampuan, kecerdasan masing-masing Line follower robot pun berbeda-beda. Sebuah modifikasi dilakukan untuk membuat sebuah Line follower robot berbeda dari Line follower robot lainnya. Salah satu contoh Line Folower Robot yang telah dimodifikasi adalah Line Follower Robot Peniup Lilin Berlengan Satu.
Line Follower Robot Berlengan Satu adalah sebuah robot yang dapat melaju pada lintasan tertentu. Selain itu robot ini juga harus mampu bereaksi bila ada Lilin yang menghalangi robot. Reaksi yang harus dilakukan oleh robot ini adalah meniup lilin dan memindahkan liin tersebut sehingga tidak menghalanginya lagi.
Line Follower Robot Peniup Lilin Berlengan Satu dapat melaju pada lintasan yang diberi warna gelap (misalnya warna hitam). Robot dapat berbelok ke kanan bila sensor sebelah kiri keluar jalur. Robot dapat berbelok ke kiri bila sensor sebelah kanan keluar lintasan. Selain dapat berbelok ke kanan dan ke kiri sesuai dengan lintasan yanga dilalui, robot lengan juga dapat berputar bila lintasan yang dilaluinya telah habis (putus). Apabila ada lilin yang menghalangi robot maka robot akan memadamkan lilin dan memindahkan liln tersebut.
DAFTAR ISI
HALAMAN JUDUL ...
LEMBAR PENGESAHAN ... i
KATA PENGANTAR ... iii
ABSTRAK ... v DAFTAR ISI ... vi DAFTAR TABEL ... ix DAFTAR GAMBAR ... x BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Tujuan ... 2 1.3 Pembatasan Masalah ... 2 1.4 Sistematika Penulisan ... 3
BAB II TEORI DASAR ... 5
2.1 Mikrokontroller ATmega16 ... 5
2.1.1 Port sebagai input/output digital ... 7
2.1.2 Timer ... 9
2.1.3 Timing Diagram Timer/Counter ... 10
2.1.4 Register Timer/Counter TCNT0 ... 15
2.1.5 Register Timer/Counter OCR0 ... 16
2.1.7 Serial pada ATMega16 ... 17
2.2 Teori Motor DC ... 18
2.2.1 Prinsip Kerja Motor DC ... 18
2.2.2 Kecepatan Motor DC ... 20
2.2.3 Torsi ... 21
2.2.4 Konstruksi Motor DC ... 22
2.3 LDR ( Light Dependent Resistor ) ... 23
2.4 IR LED (Infra Red Light Emitting Diode) ... 24
2.4.1 Phototransistor ... 26 2.5 Motor Servo ... 27 2.6 L298 ... 30 2.7 Bahasa Pemograman ... 31 2.7.1 Bahasa C ... 31 2.7.1.1 Header ... 31 2.7.1.2 Tipe Data ... 32 2.7.1.3 Operator ... 33 2.7.1.4 Pernyataan Bahasa C ... 36
BAB III PERANCANGAN DAN PEMBUATAN ALAT ... 39
3.1 Gambaran Umum ... 39
3.2 Konfigurasi Sistem ... 40
3.3 Diagram Blok Sistem ... 40
3.4 Perencanaan Perangkat Keras Elektronik ... 41
3.4.1 Rangkaian Sistem Minimum Mikrokontroller ATmega16 ... 41
3.4.2 Perancangan rangkaian power suplly ... 43
3.4.3 Rangkaian Sensor Garis ... 44
3.4.4 Rangkaian LDR ... 48
3.4.5 Rangkaian Downloader ... 49
3.4.6 Rangkaian Driver Motor L298 ... 50
3.4.7 Motor Servo ... 52
3.5 Perancangan Mekanik ... 53
3.5.1 Perancangan Badan Robot ... 54
3.5.2 Rancangan Base Robot (Badan Robot) ... 58
3.5.3 Lengan Robot ... 59
3.5.4 Kipas ... 62
3.6 Flowchart ... 63
BAB IV PENGUJIAN ALAT DAN ANALISA ... 64
4.1 Tujuan Pengujian ... 65
4.2 Pengujian Alat ... 65
4.2.1 Pengujian Rangkaian Downloader ... 66
4.2.2 Pengujian Perangkat Power Supply ... 69
4.2.3 Pengujian Sistem Minimum Mikrokontroller ATmega16. ... 70
4.2.4 Pengujian Rangkaian Sensor ... 73
4.2.5 Pengujian Driver Motor L298 ... 76
4.2.6 Pengujian Motor Servo Standar ... 80
4.2.7.1 Hasil dan Analisa Pengujian Robot Tanpa
Halangan Dengan Cahaya Yang Terang... 85 4.2.7.2 Hasil dan Analisa Pengujian Robot Dengan
Penghalangan Yang Akan Dilalui Robot…. 86 4.2.7.3 Hasil Analisa Percobaan Secara Keseluruhan…... 88
BAB V PENUTUP ... 90 5.1 Kesimpulan ... 90 5.2 Saran ... 90 DAFTAR PUSTAKA ... LAMPIRAN ...
DAFTAR TABEL
2.1 Konfigurasi Pin Port ... 8
2.2 Deskripsi Bit Mode Pembangkit Bentuk Gelombang ... 13
2.3 Mode Output Pembanding, tanpa PWM ... 14
2.4 Mode Output Pembanding, mode fast PWM ... 14
2.5 Mode Output Pembanding, mode phase correct PWM ... 14
2.6 Deskripsi bit clock select ... 15
2.7 Tipe-Tipe Data Dasar ... 32
2.8 Operator Kondisi ... 34
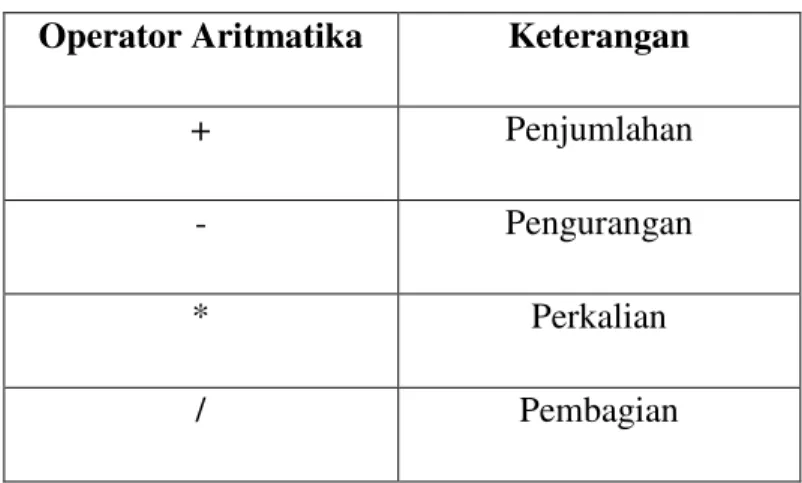
2.9 Operator Aritmatika ... 34
2.10 Operator Logika ... 34
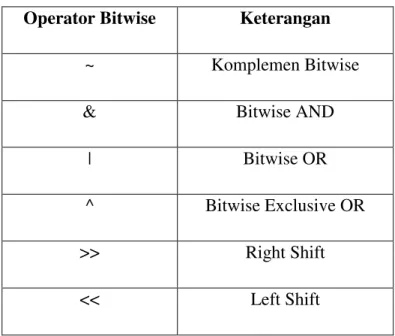
2.11 Operator Bitwise ... 35
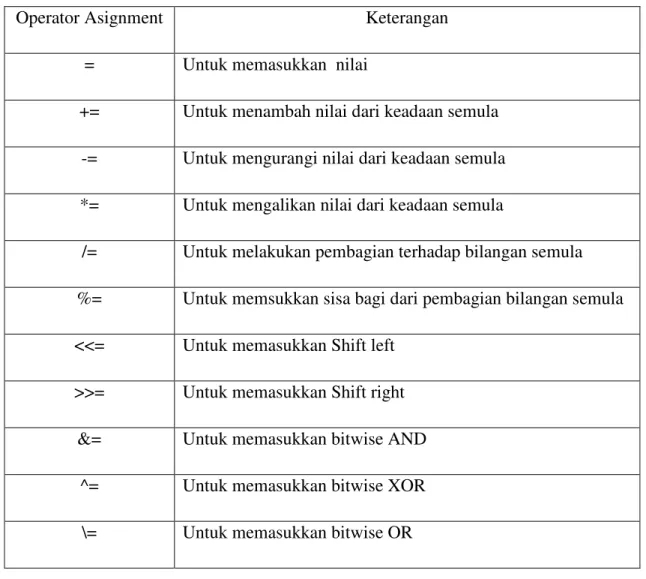
2.12 Operator Assignment ... 35
4.1 Hasil pengujian regulator ... 69
4.3 Pembacaan Sensor terhadap Garis Hitam ... 75 4.4 Pengujian Driver Motor ... 79
DAFTAR GAMBAR
2.1 Pin-pin ATMega16 Kemasan 40-pin ... 7
2.2 Blok Diagram Timer/Counter ... 9
2.3 Timing Diagram Timer/Counter, tanpa Prescaling ... 10
2.4 Timing Diagram Timer/Counter, dengan Prescaling ... 10
2.5 Timing Diagram Timer/Counter, dengan Prescaling ... 11
2.6 Timing diagram timer/counter, menyeting OCFO, pengosongan data timer sesuai data pembanding, dengan pescaler (fclk I/O/8) ... 11
2.7 Register Timer Counter 8 Bit ... 12
2.8 Register Timer TCNT0 ... 15
2.9 Register Timer OCR0 ... 16
2.10 Register Timer TIFR ... 17
2.11 Interaksi Garis Gaya Magnetik dengan Arus Listrik. ... 18
2.12 Prinsip Kerja Motor DC ... 19
2.14 Karakteristik Linear Motor DC ... 21
2.15 Bagian-Bagian Motor DC ... 22
2.16 Simbol dan Bentuk LDR ... 23
2.17 Rangkaian Sensor LDR ... 24
2.18 Kaki Anoda dan Katoda pada IR LED ... 25
2.19 Bentuk dan Simbol IR LED ... 25
2.20 Bentuk dan Simbol Phototransistor ... 26
2.21 Standart Motor Servo ... 27
2.22 Bentuk Signal Pengontrolan Motor Servo ... 28
2.23 Skematis Pengiriman Pulsa dari Mikrokontroler ke Motor Servo .... 30
2.24 Bentuk dan Simbol L298 ... 30
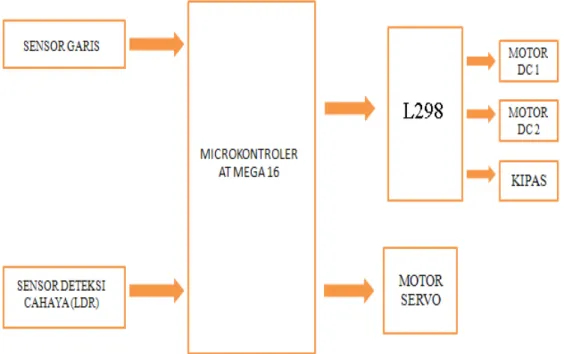
3.1 Blok Diagram Sistem ... 40
3.2 Sistem Minimum rangkaian Mikrokontroler Atmega16 ... 42
3.3 Rangkain Power Supplay. ... 43
3.4 Rangkaian Sensor Garis ... 45
3.6 Sensor Mengenai Garis Putih ... 46
3.7 Rangkaian Sensor LDR ... 49
3.8 Rangkaian Downoader DB25 ... 50
3.9 Rangkaian Driver Motor L298 ... 51
3.10 Lustrasi Pengendalian Motor didalam IC Driver Motor ... 52
3.11 Konstruksi Motor Servo ... 53
3.12 Perancangan Robot Secara Keseluruhan ... 54
3.13 Skema Mekanik Robot ... 55
3.14 Pergerakan Maju ... 56
3.15 Pergerakan Maju Lalu Berbelok ke Kanan ... 57
3.16 Pergerakan Maju Lalu Berbelok ke Kiri ... 57
3.17 Gambar Base Robot ( Badan Robot ) Tanpak Atas ... 58
3.18 Gambar Base Robot ( Badan Robot ) Tanpak Bawah ... 59
3.19 Lengan Robot ... 60
3.20 Gambar Lengan Tampak Samping ... 61
3.22 Gambar Kipas Peniup Api Lilin ... 62
3.23 Gambar Line Follower Robot Penip Lilin Berlengan Satu ... 64
4.1 Blok Diagram Pengujian Rangkaian Downloader ... 67
4.2 Program setting untuk Rangkaian Downloder ... 67
4.3 CodeVision Chip Programmer Untuk Proses Downlod ... 68
4.4 Proses Mendownload Mikrokontroler ... 68
4.5 Rangkaian Power Suplay ... 70
4.6 Blok Diagram Pengujian Minimum System ... 71
4.7 Listing Program Pengujian Sistem Minimum ... 72
4.8 Kondisi 1 Pembacaan Sensor ... 74
4.9 Kondisi 2 Pembacaan Sensor ... 74
4.10 Kondisi 3 Pembacaan Sensor ... 74
4.11 Kondisi 4 Pembacaan Sensor ... 74
4.12 Blok Diagram Pengujian Driver Motor L298 ... 76
4.13 Listing Program Pergerakan Maju ... 77
4.15 Listing Program Pergerakan Belok Kanan ... 78
4.16 Listing Program Pergerakan Belok Kiri ... 79
4.17 Blok Diagram Pengujian Motor Servo ... 81
4.18 Pemberian Pulsa Untuk Perputaran Motor Servo ... 81
4.19 Listing Program Standard Pengujian Motor Servo ... 82
4.20 Pengujian Motor Servo Putar Kanan Dan Putar Kiri ... 83
4.21 Robot Saat Star sebelum diberi rintangan ... 85
4.22 Gerak Robot Sebelum Diberi Rintangan Lilin ... 87
BAB 1 PENDAHULUAN
1.1LATAR BELAKANG
Robot-robot cerdas sudah banyak dipakai di dunia industri maupun dalam kehidupan sehari-hari. Robot mampu menggantikan pekerjaan-pekerjaan yang tidak bisa dikerjakan oleh manusia misalnya disebabkan karena faktor keamanan maupun faktor kesehatan yang dapat membahayakan manusia. Pada intinya robot digunakan untuk meringankan pekerjaan manusia.
Dalam hal lain robot juga dapat dijadikan sebagai hobi yang cukup menyenangkan. Hal ini sudah terbukti dengan banyaknya industri yang memproduksi robot-robot mainan dengan berbagai jenis yang dapat dijadikan sebagai hobi oleh konsumennya. Robot-robot yang dijadikan sebagai hobi biasanya memiliki bentuk-bentuk unik seperti menyerupai bentuk-bentuk manusia, binatang, maupun kendaraan yang sering digunakan oleh manusia. Robot-robot tersebut diprogram sehingga berfungsi sesuai dari bentuk robot tersebut.
Berdasarkan hal tersebut dibuatlah robot mainan yang berbentuk menyerupai kendaraan yang dapat berjalan mengikuti garis yang berwarna gelap sesuai dengan jalur atau lintasan. Robot ini berbasis mikrokontroller, mikrokontroller yang digunakan adalah ATmega16. Robot tersebut menggunakan sensor LDR yang berfungsi untuk mendeteksi adanya cahaya. Setelah dideteksi adanya cahaya (menggunakan lilin), kemudian akan mengaktifkan kipas untuk mematikan nyala lilin tersebut. Setelah itu lilin yang menghalangi jalur tersebut akan dipindahkan ke arah samping sehingga tidak menghalangi jalan robot di lintasan.
Hal tersebut di atas mudah diaplikasikan pada skala robotic karena pada skala robotic ini ada beberapa hal yang bisa disederhanakan. Salah satu hal yang bisa disederhanakan adalah lintasan. Lintasan yang akan dilalui kendaraan berbasis robotik ini bisa disesuaikan dengan tingkat kecerdasan robot. Sedangkan tingkat
kecerdasan robot sendiri ditentukan oleh sensor yang dimiliki dan program yang telah dibuat. Oleh karena itu perlu lebih diperkenalkan cara membuat robot termasuk didalamnya cara membuat program yang digunakan untuk mengontrol robot tersebut. Oleh karna itu mikrokontroller merupakan seperangkat alat yang diadaptasi untuk keperluaan pembuatan robot tersebut, Pada peracangan alat ini Mikrokontroller digunakan untuk pengontrol line follower robot peniup lilin. Dan dalam bahasa pemograman kita gunakan bahasa C, karena lebih mudah dipelajari karena mempunyai struktur bahasa tingkat tinggi yang lebih mudah dipahami.
1.2. Tujuan
Tujuan dari tugas akhir ini adalah membuat sebuah robot yang mampu melaju pada lintasan tertentu. Selain itu robot ini juga mampu bereaksi meniup lilin dan memindahkan benda-benda yang merintangi perjalanannya. Reaksi yang harus dilakukan robot ini adalah meniup lilin dan memindahkan benda tersebut sehingga tidak merintangi perjalanannya lagi. Merancang pengendali menggunakan ATmega16 sehingga robot dapat bekerja sesuai dengan yang diinginkan.
1.3. Pembatasan Masalah
Pada Tugas Akhir ini, diperlukan batasan masalah agar pembahasan tidak terlalu luas dan menyimpang dari topik. Pembatasan masalah yang diberikan antara lain :
1. Mikrokontroller ATmega16 sebagai pengendali pada rancangan ini 2. Pembahasan perangkat lunak (software) yang digunakan
3. Pembahasan tentang sensor LDR dan Infra Red, rangkaian driver, dan rangkaian pendukung lainnya.
4. Prinsip kerja robot beserta pengujiannya : Merancang dan membuat tangan robot agar benda yang diambil bisa di genggam, kipas sebagai peniup dapat meniup
lilin dan posisi dari sensor bisa di pasang dengan tepat. Kemudian merancang perangkat lunak atau software agar microcontroller ATmega16 dapat berfungsi sebagai pengendali yang baik.
1.4. Sistematika Penulisan
Dalam mempermudah dan memahami isi dari tugas akhir ini, maka akan digunakan sistematika penulisan, yaitu : Pendahuluan, Teori penunjang, prinsip kerja sistem, perancangan dan pembuatan robot, pengendali yang menggunakan microcontroller ATmega16, analisa dan simulasi ditutup oleh Kesimpulan dan saran dari tugas akhir ini. Sistem penulisan tugas akhir ini terdiri dari :
BAB I PENDAHULUAN
Bab ini berisi tentang latar belakang masalah, perumusan masalah, tujuan, manfaat penelitian, batasan masalah, metodologi, dan sistematika penulisan. BAB II TEORI DASAR
Dalam bab ini diuraikan tentang teori-teori penunjang yang dijadikan landasan dan rujukan dalam pembuatan Proyek Akhir ini. Teori penunjang disini meliputi teori mikrokontroler ATmega16, sensor, driver, motor DC, dan komunikasi antara PC dengan mikrokontroller.
BAB III PERANCANGAN DAN PEMBUATAN ALAT
Perancangan Dan Pembuatan Alat yang menjelaskan tentang proses perencanaan robot baik mekanik maupun hardware. Pada bagian mekanik akan membahas desain dan cara kerjanya. Pada bagian hardware akan membahas masalah pembuatan sistim minimum mikrokontroler ATmega16, rangkaian komunikasi serial dan parallel serta driver motor DC.
BAB IV PENGUJIAN DAN ANALISA
Bab ini membahas penganalisaan terhadap prinsip kerja dari robot terhadap sistem pengontrolan yang dilakukan oleh mikrokontroller. Melakukan pengujian terhadap mekanik dari robot itu sendiri dan pengujian terhadap rangkain pendukung sistem.
BAB V KESIMPULAN DAN SARAN
BAB II TEORI DASAR
2.1 Mikrokontroller ATmega16
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving, ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam system menggunakan hubungan serial SPI. ATMega16.
ATMega16 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses.
Beberapa keistimewaan dari AVR ATMega16 antara lain: 1. Advanced RISC Architecture
• 130 Powerful Instructions – Most Single Clock Cycle Execution
• 32 x 8 General Purpose Fully Static Operation
• Up to 16 MIPS Throughput at 16 MHz
• On-chip 2-cycle Multiplier
2. Nonvolatile Program and Data Memories
• Optional Boot Code Section with Independent Lock Bits
• 512 Bytes EEPROM
• 512 Bytes Internal SRAM
• Programming Lock for Software Security 3. Peripheral Features
• Two 8-bit Timer/Counters with Separate Prescalers and Compare Mode
• Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
• One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture Mode
• Real Time Counter with Separate Oscillator
• Four PWM Channels
• 8-channel, 10-bit ADC
• Byte-oriented Two-wire Serial Interface
• Programmable Serial USART 4. Special Microcontroller Features
• Power-on Reset and Programmable Brown-out Detection
• Internal Calibrated RC Oscillator
• External and Internal Interrupt Sources
• Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Powerdown, Standby and Extended Standby
5. I/O and Package
• 32 Programmable I/O Lines
• 40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad MLF 6. Operating Voltages
• 2.7 - 5.5V for Atmega16L
Gambar 2.1 Pin-pin ATMega16 Kemasan 40-pin
Pin-pin pada ATMega16 dengan kemasan 40-pin DIP (dual inline package) ditunjukkan oleh gambar 1. Guna memaksimalkanperforma, AVR menggunakan arsitektur Harvard (dengan memori danbus terpisah untuk program dan data). 2.1.1 Port sebagai input/output digital
ATMega16 mempunyai empat buah port yang bernama PortA, PortB, PortC,
dan PortD. Keempat port tersebut merupakan jalur bidirectional dengan pilihan
internal pull-up. Tiap port mempunyai tiga buah register bit, yaitu DDxn, PORTxn,
nomor bit. BitDDxn terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit DDxn dalam register DDRx (Data Direction Register) menentukan arah pin. Bila DDxn diset 1 maka Px berfungsi sebagai pin output. Bila DDxn diset 0 maka Px berfungsi sebagai pin input.Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pin input, maka resistor pull-up akan diaktifkan. Untuk mematikan resistor pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin output. Pin port adalah tri-state setelah kondisi reset. Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0. Saat mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output high (DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enabled
(DDxn=0, PORTxn=1) atau kondisi output low (DDxn=1, PORTxn=0).
Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong
high driver dengan sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada
register SFIOR dapat diset 1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan pull-up ke kondisi output low juga menimbulkan masalah yang sama. Kita harus menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1, PORTxn=0) sebagai kondisi transisi.
Tabel 2.1 Konfigurasi pin port
Bit 2 – PUD : Pull-up Disable Bila bit diset bernilai 1 maka pull-up pada port I/O akan dimatikan walaupun register DDxn dan PORTxn dikonfigurasikan untuk menyalakan pull-up (DDxn=0, PORTxn=1).
2.1.2 Timer
Timer/counter adalah fasilitas dari ATMega16 yang digunakan untuk perhitungan pewaktuan. Beberapa fasilitas chanel dari timer counter antara lain:
counter channel tunggal, pengosongan data timer sesuai dengan data pembanding,
bebas -glitch, tahap yang tepat Pulse Width Modulation (PWM), pembangkit frekuensi, event counterexternal.
Gambar diagram block timer/counter 8 bit ditunjukan pada gambar 2. Untuk penempatan pin I/O telah di jelaskan pada bagian I/O di atas. CPU dapat diakses register I/O, termasuk dalam pin-pin I/O dan bit I/O. Device khusus register I/O dan lokasi bit terdaftar pada deskripsi timer/counter 8 bit.
Gambar 2.2 Blok Diagram Timer/Counter 2.1.3 Timing Diagram Timer/Counter
Timer/counter didesain sinkron clock timer (clkT0) oleh karena itu ditunjukkan sebagai sinyal enable clock pada gambar 3. Gambar ini termasuk informasi ketika flag interrupt dalam kondisi set. Data timing digunakan sebagai dasar dari operasi timer/counter.
Sesuai dengan gambar 4 timing diagram timer/counter dengan prescaling
maksudnya adalah counter akan menambahkan data counter (TCNTn) ketika terjadi pulsa clock telah mencapai 8 kali pulsa dan sinyal clock pembagi aktif clock dan ketika telah mencapai nilai maksimal maka nilai TCNTn akan kembali ke nol. Dan kondisi flagtimer akan aktif ketika TCNTn maksimal.
Gambar 2.4 Timing Diagram Timer/Counter, dengan Prescaling
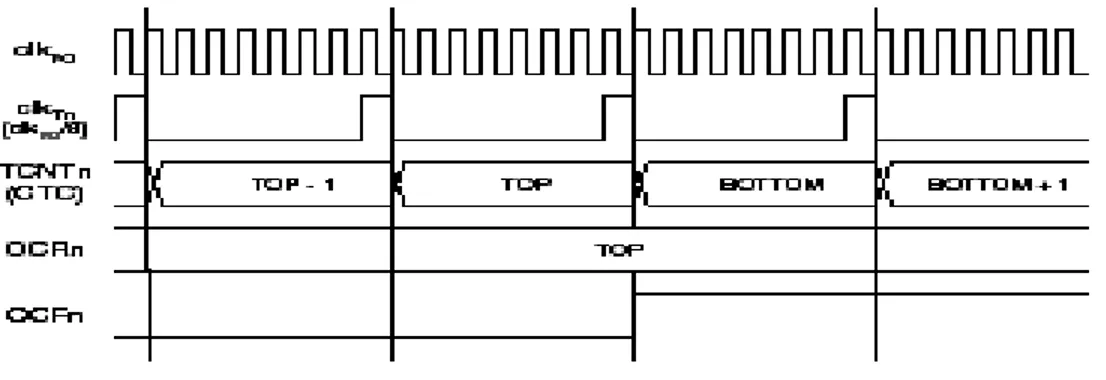
Sama halnya timing timer diatas, timing timer/counter dengan seting OCFO timer mode ini memasukan data ORCn sebagai data input timer. Ketika nilai ORCn sama dengan nilaiTCNTn maka pulsa flag timer akan aktif. TCNTn akan bertambah nilainya ketika pulsa clock telah mencapai 8 pulsa. Dan kondisi flag akan berbalik (komplemen) kondisi ketika nilai TCNTn kembali kenilai 0 (overflow).
Gambar 2.5 Timing Diagram Timer/Counter, menyeting OCFO, dengan pescaler (fclk_I/O/8)
Ketika nilai ORCn sama dengan nilai TCNTn maka pulsa flag timer akan aktif. TCNTn akan bertambah nilainya ketika pulsa clock telah mencapai 8 pulsa. Dan kondisi flag akan berbalik (komplemen) kondisi ketika nilai TCNTn kembali kenilai 0 (overflow).
Gambar 2.6 Timing diagram timer/counter, menyeting OCFO, pengosongan data timer sesuai dengan data pembanding,dengan pescaler (fclk_I/O/8)
Gambar 2.7 Register Timer Counter 8 Bit
Bit 7 – FOCO : perbandingan kemampuan output
FOCO hanya akan aktif ketika spesifik-spesifik bit WGM00 tanpa PWM mode. Adapun untuk meyakinkan terhadap kesesuaian dengan device-device yang
akan digunakan, bit ini harus diset nol ketika TCCRO ditulisi saat mengoperasikan mode PWM. Ketika menulisi logika satu ke bit FOCO, dengan segera dipaksakan untuk disesuaikan pada unit pembangkit bentuk gelombang. Output OCO diubah disesuaikan pda COM01: bit 0 menentukan pengaruh daya pembanding.
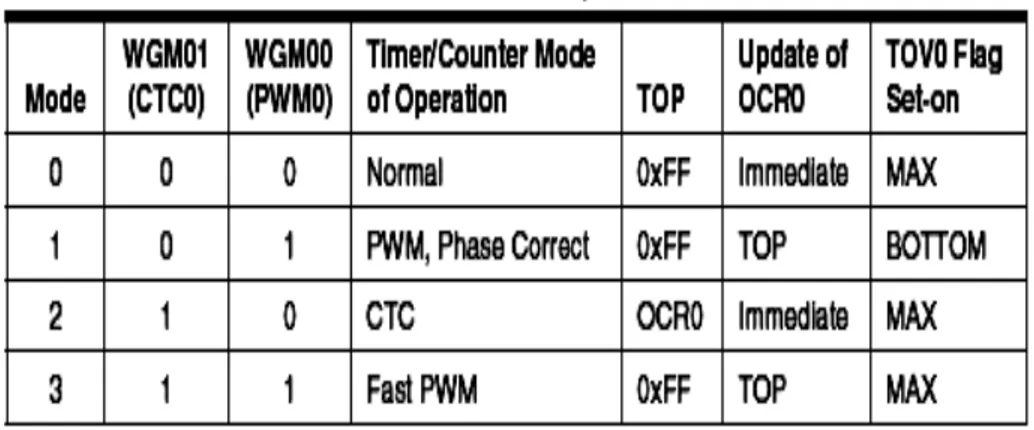
Bit 6,3 – WGM01:0: Waveform Generation Mode
Bit ini mengontrol penghitungan yang teratur pada counter, sumber untuk harga counter maksimal ( TOP )., dan tipe apa dari pembangkit bentuk gelombang yang digunakan. Mode-mode operasi didukung oleh unit timer/counter sebagai berikut : mode normal, pembersih timer pada mode penyesuaian dengan pembanding ( CTC ), dan dua tipe mode Pulse Width Modulation ( PWM ).
Tabel 2.2 Deskripsi Bit Mode Pembangkit Bentuk Gelombang
catatan: definisi nama-nama bit CTC0 dan PWM0 sekarang tidak digunakan lagi.
Gunakan WGM 01: 0 definisi. Bagaimanapun lokasi dan fungsional dan lokasi dari masing-masing bit sesuai dengan versi timer sebelumnya.
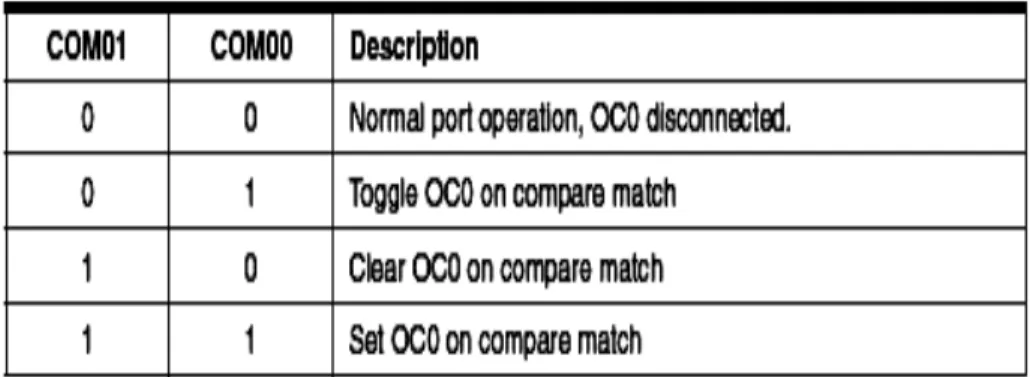
Bit 5:4 – COMO1:0 Penyesuaian Pembanding Mode Output
Bit ini mengontrol pin output compare (OCO), jika satu atau kedua bit COM01:0 diset, output OC0 melebihi fungsional port normal I/O dan keduanya terhubung juga. Bagaimanapun, catatan bahwa bit Direksi Data Register (DDR) mencocokan ke pin OC0 yang mana harus diset dengan tujuan mengaktifkan. Ketika OC0 dihubungkan ke pin, fungsi dari bit COM01:0 tergantung dari pengesetan bit WGM01:0. Tabel di bawah menunjukkan COM fungsional ketika bit-bt WGM01:0 diset ke normal atau mode CTC (non PWM).
Tabel 2.3 Mode Output Pembanding, tanpa PWM
Tabel 2.4 menunjukan bit COM01:0 fungsional ketika bit WGM01:0 diset ke mode fast PWM.
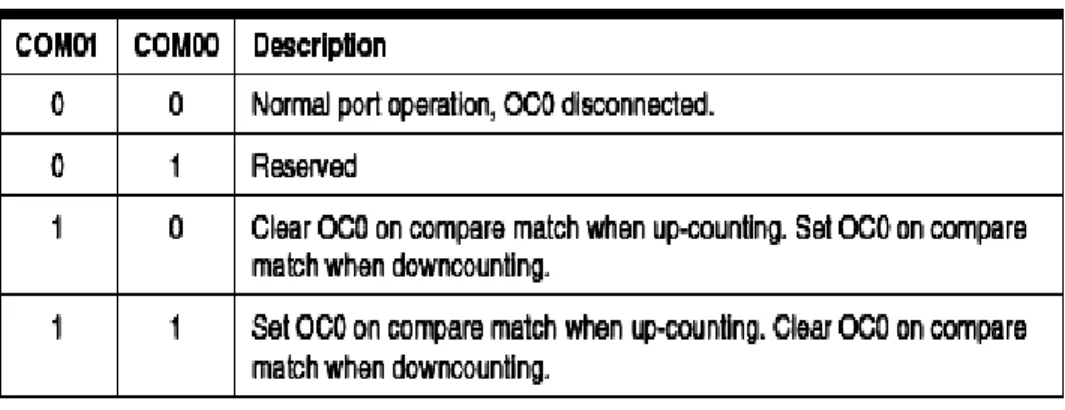
Tabel 2.5 menunjukan bit COM01:0 fungsional ketika bit WGM01:0 diset ke mode
phase correct PWM.
Tabel 2.5 Mode Output Pembanding, Mode phase correct PWM
Bit 2:0 – CS02:0 : Clock Select
Tiga bit clock select sumber clock digunakan dengan timer/counter. Jika mode
pin eksternal digunakan untuk timer counter0, perpindahan dari pin T0 akan memberi
clock counter.
Sesuai dengan tabel diatas maka sumber clock dapat dibagi sehingga timer/counter dapat disesuaikan dengan banyak data yang dihitung.
2.1.4 Register Timer/Counter TCNT0
Gambar 2.8 Register Timer TCNT0
Register timer/counter memberikan akses secara langsung, keduanya digunakan untuk membaca dan menulis operasi, untuk penghitung unit 8-bit timer/counter. Menulis ke blok-blok register TCNT0 (removes) disesuaikan dengan clock timer berikutnya. Memodifikasi counter (TCNT0) ketika perhitungan berjalan, memperkenalkan resiko kehilangan perbandingan antara TCNC0 dengan register OCR0.
2.1.5 Register Timer/Counter OCR0
Register output pembanding berisi sebuah haraga 8 bit yang mana secara terus-menerus dibandingkan dengan harga counter (TCNT0). Sebuah penyesuaian dapat digunakan untuk membangkitkan output interrupt pembanding, atau untuk membangkitkan sebuah output bentuk gelombang pada pin OC0.
2.1.6 Register Timer/Counter Interrupt Mask
Bit 1-OCIE0: output timer counter menyesuaikan dengan kesesuaian interrupt yang aktif.
Ketika bit OCIE0 ditulis satu, dan 1-bit pada register status dalam kondisi set (satu), membandingkan timer/counter pada interrupt yang sesuai diaktifkan. Mencocokkan interrupt yang dijalankan kesesuaian pembanding pada timer/counter0 terjadi, ketika bit OCF0 diset pada register penanda timer/counter-TIFR.
Bit 0 – TOIE0: Timer/Counter 0 Overflow Interrupt Enable
Ketika bit TOIE0 ditulis satu, dan 1-bit pada register status dalam kondisi set (satu), timer/counter melebihi interrupt diaktifkan. Mencocokkan interrupt dijalankan jika kelebihan pada timer/counter0 terjadi, ketika bit TOV0 diset pada register
penanda timer/counter- TIFR
Gambar 2.10 Register Timer TIFR
Bit 1 – OCF0: Output Compare Flag 0
OCF0 dalam kondisi set (satu) kesesuaian pembanding terjadi antara timer/counter dan data pada OCRO – Register 0 keluaran pembanding. OCF0 diclear oleh hardware ketika eksekusi pencocokan penanganan vector interrupt. Dengan alternatif mengclearkan OCF0
dengan menuliskan logika satu pada flag. Ketika I-bit pada SREG, OCIE0 (Timer/Counter0 penyesuaian pembanding interrupt enable), dan OCF0 diset (satu), timer/counter pembanding kesesuaian interrupt dijalankan.
Bit 0 – TOV0: Timer/Counter Overflow Flag
Bit TOV0 diset (satu) ketika kelebihan terjadi pada timer/counter0. TOV0 diclearkan dengan hardware ketika penjalanan pencocokan penanganan vector
interrupt. Dengan alternatif, TOV0 diclearkan dengan jalan memberikan logika satu
pada flag. Ketika Ibit pada SREG, TOIE0 (Timer/Counter0 overflow interrupt
enable), dan TOV0 diset (satu ), timer/counter overflow interrupt dijalankan. Pada
tahap mode PWM yang tepat, bit ini di set ketika timer/counter merubah bagian perhitungan pada $00.
Universal synchronous dan asynchronous pemancar dan penerima serial adalah suatu alat komunikasi serial sangat fleksibel. Jenis yang utama adalah :
a) Operasi full duplex (register penerima dan pengirim serial dapat berdiri sendiri) b) Operasi Asychronous atau synchronous
c) Master atau slave mendapat clock dengan operasi synchronous
d) Pembangkit baud rate dengan resolusi tinggi
e) Dukung frames serial dengan 5, 6, 7, 8 atau 9 Data bit dan 1 atau 2 Stop bit f) Tahap odd atau even parity dan parity check didukung oleh hardware
g) Pendeteksian data overrun
h) Pendeteksi framing error
i) Pemfilteran gangguan (noise) meliputi pendeteksian bit false start dan pendeteksian
low pass filter digital
j) Tiga interrupt terdiri dari TX complete, TX data register empty dan RX complete. k) Mode komunikasi multi-processor
2.2 Teori Motor DC
2.2.1 Prinsip Kerja Motor DC
Gaya listrik dapat menimbulkan medan magnet. Konversi energi listrik menjadi energi mekanik secara sederhana dapat dilihat pada gambar 2.11.
Gambar 2.11 Interaksi Garis Gaya Magnetik dengan Arus Listrik.
Pada gambar (a) terlihat adanya medan magnet yang timbul searah jarum jam di sekitar penghantar yang dialiri arus listrik ke arah menjauhi pembaca. Pada gambar (b) garis gaya magnet ‘mengalir’ dari arah kutub utara ke kutub selatan. Gambar (c) menunjukkan bila penghantar diberi arus listrik menjauhi pembaca dan berada pada medan magnet permanen dengan arah kiri ke kanan pembaca, maka resultan gaya yang terjadi arahnya ke bawah. Gambar(d) menunjukkan bila penghantar diberi arus listrik menuju pembaca dan berada pada medan magnet permanen dengan arah kiri ke kanan pembaca, maka resultan gaya yang terjadi arahnya ke atas.
Pada dasarnya motor DC merupakan tranduser torsi yang mengubah energi listrik ke energi mekanik. Prinsip kerja motor DC berdasarkan pada penghantar yang membawa arus listrik yang ditempatkan dalam suatu medan magnet akibatnya penghantar tersebut akan mengalami gaya, dapat dilihat pada gambar 2.12.
Gambar 2.12 Prinsip Kerja Motor DC
Ini adalah Bentuk gambar motor DC dapat dilihat pada gambar 2.13
Gambar 2.13 Bentuk Motor DC
Gaya menimbulkan torsi yang akan menghasilkan rotasi mekanik, sehingga rotor akan berputar. Ringkasnya prinsip kerja dari motor membutuhkan:
• Adanya garis-garis gaya medan magnet (fluks), antara kutub yang berada distator.
• Penghantar yang dialiri arus listrik ditempatkan pada jangkar yang berada dalam medan magnet tadi.
• Pada penghantar timbul gaya yang menghasilkan torsi. 2.2.2 Kecepatan Motor DC
Secara umum motor DC berlaku persamaan GGL lawan, yang ada hubungannya dengan kecepatan sebagai berikut,
Eb = Km.φ.ω
dengan: ω = kecepatan motor dalam putaran perdetik (pps)
Eb = GGL lawan yang dibangkitkan oleh jangkar (volt)
φ = fluks perkutub (weber)
Motor DC magnet permanen mempunyai medan magnet yang konstan (φ) sehingga kecepatan motor dipengaruhi dan berbanding lurus dengan tegangan belitan jangkar.
Kurva tegangan-kecepatan dari suatu motor DC ada saat beban nol terlihat pada Gambar 2.14
Gambar 2.14 Karakteristik Linear Motor DC Karakteristik linear Eb
Motor DC mempunyai dua bagian dasar yaitu :
1. Bagian diam/tetap (stasioner) yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektromagnetik) atau magnet permanen. Bagian stator terdiri dari bodi motor yang memiliki magnet yang melekat padanya. Untuk motor kecil, magnet tersebut adalah magnet permanen sedangkan untuk motor besar menggunakan elektromagnetik. Kumparan yang dililitkan pada lempeng-lempeng magnet disebut kumparan medan.
2. Bagian berputar (rotor). Rotor ini berupa sebuah koil dimana arus listrik mengalir. Suatu kumparan motor akan berfungsi apabila mempunyai :
• Kumparan medan,berfungsi sebagai pengahsil medan magnet.
• Kumparan jangkar, berfungsi sebagai pengimbas GGL pada konduktor yang terletak pada laur-alur jangkar.
• Celah udara yang memungkinkan berputarnya jangkar dalam medan magnet.
2.2.3 Torsi
Torsi adalah putaran dari suatu gaya terhadap suatu poros. Hal ini dapat diukur dengan hasil kali gaya itu dengan jari-jari lingkaran, dimana gaya itu bekerja. Pada suatu pulley dengan jari-jari r meter bekerja suatu gaya F Newton yang menyebabkan pulley berputar dengan kecepatan n putaran per detik.
2.2.4 Konstruksi Motor DC
Konstruksi dari sebuah motor DC ditunjukkan seperti pada gambar 2.36 di bawah ini. Pada motor arus searah rotornya mempunyai kumparan tidak hanya satu, terdiri kumparan dan komulator yang banyak untuk mendapatkan torsi yang terus menerus. Rotor terdiri dari jangkar yang intinya terbuat dari lempengan-lempengan yang ditakik.Susunan lempengan membentuk celah-celah tersebut dimasuki konduktor kumparan jangkar. Ujung tiap-tiap kumparan dihubungkan pada satu segment komutator. Tiap segmen merupakan pertemuan dua ujung kumparan yang terhubung. Terlihat pada gambar 2.15.
Gambar 2.15 Bagian-Bagian Motor DC
Kumparan penguat dihubungkan seri, jangkar merupakan bagian bergerak yang terbuat dari besi berlaminasi untuk mengurangi rugi-rugi arus Eddy. Kumparan jangkar diletakkan pada slot besi di sebelah luar permukaan jangkar. Pada jangkar terdapat komulator yang berbentuk silinder masing-masing diisolasi. Sisi kumparan dihubungkan dengan segmen komulator pada beberapa bagian yang berbeda, tergantung dari tipe lilitan yang diperlukan.
2.3 LDR ( Light Dependent Resistor )
LDR atau light Dependent Resistor adalah salah satu jenis resistor yang nilai hambatannya dipengaruhi oleh cahaya yang diterima olehnya. LDR dibuat dari Cadmium Sulfida yang peka terhadap cahaya. Seperti yang telah diketahui bahwa cahaya memiliki dua sifat yang berbeda yaitu sebagai gelombang elektromagnetik dan foton/partikel energi (dualisme cahaya). Saat cahaya menerangi LDR, foton akan menabrak ikatan Cadmium Sulfida dan melepaskan elektron. Semakin besar intensitas cahaya yang datang, semakin banyak elektron yang terlepas dari ikatan. Sehingga hambatan LDR akan turun saat cahaya meneranginya.
Gambar 2.16 Simbol dan Bentuk LDR
Nilai Vout bergantung pada intensitas cahaya yang diterima LDR dari cahaya
api. Sesuai dengan karakteristik LDR, harga RLDR berbanding terbalik terhadap
intensitas cahaya yang diterimanya. Semakin jauh jarak cahaya api terhadap LDR maka semakin besar RLDR.
Keluaran kaki output LDR masih berupa sinyal analog. Sinyal analog yang keluar dari sensor LDR adalah 0,45 sampai dengan 3 Volt. Besarnya tegangan yang keluar dari rangkaian tersebut dapat dihitung dengan menggunakan persamaan berikut ini
xVcc
R
R
R
V
LDR out+
=
Gambar 2.17 Rangkaian Sensor LDR
LDR akan mempunyai hambatan yang sangat besar saat tak ada cahaya yang mengenainya (gelap). Dalam kondisi ini hambatan LDR, mampu mencapai 1 M ohm. Akan tetapi saat terkena sinar, hambatan LDR akan turun secara drastis hingga nilai beberapa puluh ohm saja. Dalam aplikasi, dianjurkan untuk mengukur nilai Rmax dan Rmin dari LDR. Pengukuran Rmax dilakukan saat gelap dan pengukuran Rmin dilakukan saat terang.
2.4IR LED (Infra Red Light Emitting Diode)
IR LED (Infra Red Light Emitting Diode) adalah salah satu jenis LED (Light Emitting Diode). LED atau biasa disebut juga dioda cahaya adalah suatu semikonduktor yang dapat memancarkan cahaya apabila ada arus listrik yang melewatinya. Karena LED tidak dapat menerima arus yang besar, maka pada pemakaiannya umumnya digabungkan secara serial dengan resistor. Fungsi resistor adalah membatasi arus yang mengalir melewati LED.
Cahaya yang dihasilkan LED tergantung pada bahan semikonduktor yang digunakan. Cahaya yang dihasilkan LED bisa berupa cahaya tampak atau inframerah
R V C C
Vo u t
(infrared). IR LED adalah jenis LED yang memancarkan cahaya inframerah (infrared). Cahaya inframerah tidak dapat dilihat oleh manusia. Cahaya inframerah tidak dapat menembus materi yang tak tembus pandang.
IR LED memiliki dua kaki yaitu katoda dan anoda. Kaki anoda pada IR LED memiliki ukuran yang lebih panjang jika dibandingkan dengan kaki katodanya. Kaki anoda dan anoda pada IR LED dapat dilihat pada gambar 2.1. IR LED akan berfungsi dengan baik jika kaki-kaki IR LED dipasang dengan benar. Kaki anoda dipasang pada bagian positif (+) dan kaki katoda dipasang pada bagian negative (-). Bentuk, kaki-kaki, symbol IR LED dan bentuk, simbol IR RED dapat dilihat pada gambar 2.18 dan 2.18.
Gambar 2.18 Kaki Anoda dan Katoda pada IR LED
2.4.1 Phototransistor
Phototransistor adalah komponen elektronik semikonduktor yang sangat sensitif terhadap cahaya. Fungsi dari phototransistor adalah sebagai penerima (receiver) cahaya. Cahaya yang diterima phototransistor dapat berasal dari sumber cahaya (transmitter) secara langsung ataupun berasal dari cahaya yang dipantulkan. Jenis cahaya yang bisa diterima phototransistor bisa berupa cahaya tampak ataupun cahaya tidak tampak. Sumber cahaya bisa berasal dari lampu, matahari, api, atau dari LED.
Phototransistor mempunyai dua kaki, yaitu kaki collector dan kaki emitter. Kaki collector phototransistor mempunyai ukuran lebih pendek jika dibandingkan dengan kaki emitternya. Kaki collector dan emitter tidak akan terhubung jika tidak ada cahaya yang diterima oleh phototransistor. Kaki collector dan emitter akan terhubung jika ada cahaya yang cukup untuk membangkitkan arus basis. Bentuk dan lambang phototransistor dapat dilihat pada gambar 2.20.
Gambar 2.20 Bentuk dan Simbol Phototransistor 2.5 Motor Servo
Motor servo adalah sebuah alat yang dapat mengubah energi listrik menjadi energi gerak. Motor servo sebenarnya digerakkan oleh sebuah motor DC. Selain terdapat komponen motor DC, di dalam motor servo pun terdapat rodagigi-rodagigi yang dipergunakan untuk mereduksi putaran dan untuk memperbesar torsi yang
dihasilkan oleh motor DC tersebut. Karena motor servo digerakkan oleh motor DC maka jenis listrik yang dipergunakan adalah jenis listrik arus searah.
Motor servo memiliki tiga kabel utama, yaitu kabel ground, kabel Vcc, dan kabel signal. Bentuk motor servo dapat dilihat pada gambar 2.21.
Gambar 2.21 Standard Motor Servo
Berbeda dengan motor DC yang dapat dengan mudah berputar 360º secara kontinu, motor servo tidak dapat berputar tanpa adanya perintah tertentu. Motor servo dapat bergerak bila dialiri arus DC dan diberi isyarat signal atau pulsa berupa arus listrik. Dengan diberi pulsa tertentu maka motor servo akan berputar pada sudut tertentu.
Salah satu contoh motor servo yang banyak digunakan adalah motor servo jenis standard servo. Motor servo jenis ini mempunyai kemampuan berputar sebesar 180º. Sama seperti motor servo pada umumnya, motor servo jenis standard servo ini akan mendeteksi signal yang dikirimkan melalui kabel signal-nya setiap selang waktu tertentu. Motor servo akan mendeteksi signal setiap 20.000 mikro detik. Jika dalam selang waktu lebih dari 20.000 mikro detik tidak ada signal maka motor servo akan mengalami slip.
P o s is i S u d u t p o ro s P o s is i S u d u t P o ro s P o s is i s u d u tP o ro s 2 0 .0 0 0 M ik ro s e c o n d 2 0 .0 0 0 M ik ro s e c o n d
Gambar 2.22 Bentuk Signal Pengontrolan Motor Servo
Untuk mengetahui lamanya pemberian pulsa per siklus yang diperlukan untuk menggerakkan motor servo pada sudut tertentu maka perlu dilakukan beberapa tahapan. Tahapan yang pertama adalah mencari tahu berapa lama pemberian pulsa per siklus yang diperlukan untuk menggerakkan motor servo ke posisi 0O dan posisi 180O. Setelah lamanya pulsa per siklus untuk kedua sudut itu diketahui, langkah selanjutnya adalah mencari tahu lamanya pulsa per siklus yang dibutuhkan untuk menggerakkan motor servo ke posisi (sudut) lainnya. Untuk mendapatkan lamanya pulsa per siklus yang dibutuhkan untuk menggerakkan motor servo ke posisi tertentu maka diperlukan interpolasi dengan rumus sebagai berikut :
×
−
+
=
α
180
350
t
180t
0t
dimana : t = lamanya pulsa per siklus untuk sudut sebesar α(mikro detik)
t0 = lamanya pulsa per siklus yang dibutuhkan untuk memposisikan motor servo ke sudut 0O motor servo tersebut (mikro detik)
t180 = lamanya pulsa per siklus yang dibutuhkan untuk memposisikan motor servo ke sudut 180O motor servo tersebut (mikro detik)
α = besarnya sudut pergerakan motor servo yang diinginkan (O) Karena lamanya pulsa per siklus sangat singkat (dalam hitungan mikro detik) maka pemberian pulsa tidak mungkin dilakukan secara manual oleh manusia (misalnya dengan menutup dan membuka saklar). Selain lamanya pulsa per siklus sangat singkat, pulsa juga harus diberikan secara kontinu selama waktu yang diinginkan agar motor servo tersebut berada pada posisi tertentu. Oleh karena itu, untuk megontrol motor servo bisa digunakan mikrokontroler sebagai pemberi pulsanya. Kabel signal motor servo dapat dihubungkan ke kaki-kaki mikrokontroler. Oleh mikrokontroler pulsa diberikan selama selang waktu tertentu secara kontinu. Skematis pengiriman pulsa dari mikrokontroler ke motor servo dapat dilihat pada
gambar 2.23.
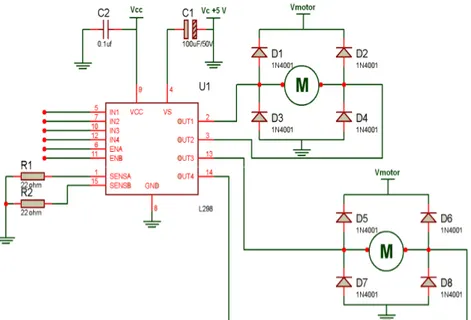
2.6 L298
L298 adalah komponen elektronik yang dipergunakan untuk mengontrol arah putaran motor DC. Satu buah L298 bisa dipergunakan untuk mengontrol dua buah motor DC. Selain bisa dipergunakan untuk megontrol arah putaran motor DC, L298 ini pun bisa dipergunakan sebagai driver motor stepper bipolar. Bentuk dan simbol
L298 dapat dilihat pada gambar 2.24.
Gambar 2.24 Bentuk dan Simbol L298
IC driver L298 memiliki kemampuan menggerakkan motor DC sampai arus 2A dan tegangan maksimum 40 volt DC untuk satu kanalnya. Pin Enable A dan B untuk mengendalikan jalan atau kecepatan motor, pin Input 1 sampai 4 digunakan untuk mengendalikan arah putaran. Pin output pada IC L298 dihubungkan ke motor DC yang sebelumnya melalui dioda yang disusun secara H-bridge.
Pengaturan kecepatan motor digunakan teknik PWM (Pulse Width
Modulation) yang diinputkan dari mikrokontroller melalui pin Enable. PWM untuk
2.7 Bahasa Pemograman 2.7.1 Bahasa C
Penggunaan sebuah sistem mikrokontroler AVR mengunakan sebuah software yang digunakan untuk menulis program, kompilasi, simulasi dan download program ke IC mikrokontroler AVR. Software yang digunakan adalah CodeVision AVR dalam bahasa C, Codevision memilki IDE (integrated Development Environment) yang lengkap, di mana penulisan program, compile, link dan download program ke chip AVR dapat dilakukan oleh CodeVision, selain itu CodeVision juga memiliki fasilitas terminal, yaitu digunakan untuk melakukan komunikasi serial dengan mikrokontroler yang sudah diprogram. Proses download ke IC mikrokontroler dapat menggunakan sistem download secara ISP (In-System Programming).
2.7.1.1 Header
Di dalam fungsi header berisi include file (.hex), yaitu library (pustaka) yang akan digunakan dalam pemograman. File-file ini mempunyai ciri yaitu namanya diakhiri dengan ekstensi .h. Misalnya pada program #include <stdio.h> menyatakan pada kompiler agar membaca file bernama stdio.h saat pelaksanaan kompilasi. Bentuk umum #include:
Contoh:
#include <delay.h> #include <delay.h> #include <stdio.h>
Prepocessor (#): Digunakan untuk memasukkan (include) text dari file lain, mendefinisikan macro yang dapat mengurangi beban kerja pemograman dan meningkatkan legibility source code (mudah dibaca). Bentuk dari (#include <nama file>) memberikan penjelasan pencarian file dilakukan pada direktori khusus
(direktori file). Bentuk lain dari header (#include “nama file”) mengisyaratkan bahwa pencarian file terlebih dahulu dilakukan pada direktori aktif tempat sumber program dan bila tidak ditemukan pencarian akan dilanjutkan pada direktori lainnya yang sesuai dengan perintah pada sistem operasi.
2.7.1.2 Tipe Data
Umumnya data yang digunakan didalam bahasa pemograman komputer dibedakan menjadi data nilai numerik dan nilai karakter. Tujuan data menjadi efisien dan efektif digunakan bahasa-bahasa pemograman komputer yang membedakan data kedalam beberapa tipe. Dalam bahasa C tersedia lima tipe data dasar, yaitu tipe data interger (nilai numeric bulat yang dideklarasikan dengan int), floatingpoint (nilai numerik pecahan ketetapan tunggal yang dideklarasikan dengan float),
double-precision (nilai numerik pecahan ketetapan ganda yang dideklarasikan dengan
double).
Tabel 2.7 Tipe-Tipe Data Dasar
Tipe Ukuran (Bit) Range
Bit 1 0,1 Char 8 -128 to 127 Unsigned Char 8 0 to 255 Signed Char 8 -128 to 127 Int 16 -32768 to 32767 Short int 16 -32768 to 32767
Unsigned int 16 0 to 65535
Signed int 16 -32768 to 32767
Long int 32 -2147483648 to 2147483647
Unsigned long int 32 0 to 4294967295
Signed long int 32 -2147483648 to 2147483647
Float 32 ±1.175e-38 to ±3.402e38
double 32 ±1.175e-38 to ±3.402e38
Karakter (dideklarasikan dengan char), dan kosong (dideklarasikan dengan
void). Int,float, double dan char dapat dikombinasikan dengan pengubah (modifier)
signed, unsigned, long dan short. Hasil dari kombinasi tipe data ini dapat dilihat pada tabel.
2.7.1.3 Operator
Dalam suatu intruksi mengandung operator dan operand. Operator merupakan sebuah simbol yang menyatakan operasi mana yang harus dilakukan oleh operand tersebut. Sedangkan operand adalah variable atau konstanta yang merupakan bagian pernyataan. Adatiga operand (a,b dan c) dan dua operator (= dan +). Operator dalam c dibagi menjadi 3 kelompok. Yaitu:
1. Unary
Operator yang beroperasi pada satu operand, missal:-n. 2. Binary
3. Ternary
Operator yang memerlukan tiga atau lebih operand, misal: a=(b*c)+
Tabel 2.8 Operator Kondisi
Operator Kondisi Keterangan
< Lebih Kecil
<= Lebih kecil sama dengan < Lebih Besar
>= Lebih Besar sama dengan
= = Sama dengan
!= Tidak samadengan
Tabel 2.9 Operator Aritmatika
Operator Aritmatika Keterangan
+ Penjumlahan
- Pengurangan
* Perkalian
% Sisa bagi(modulus)
Tabel 2.10 Operator Logika
Operator Logika Keterangan
! Boolean NOT
&& Boolean AND
|| Boolean OR
Tabel 2.11 Operator Bitwise
Operator Bitwise Keterangan
~ Komplemen Bitwise
& Bitwise AND
| Bitwise OR
^ Bitwise Exclusive OR
>> Right Shift
Tabel 2.12 Operator Assignment
Operator Asignment Keterangan
= Untuk memasukkan nilai
+= Untuk menambah nilai dari keadaan semula -= Untuk mengurangi nilai dari keadaan semula *= Untuk mengalikan nilai dari keadaan semula
/= Untuk melakukan pembagian terhadap bilangan semula %= Untuk memsukkan sisa bagi dari pembagian bilangan semula <<= Untuk memasukkan Shift left
>>= Untuk memasukkan Shift right &= Untuk memasukkan bitwise AND
^= Untuk memasukkan bitwise XOR \= Untuk memasukkan bitwise OR
2.7.1.4 Pernyataan Bahasa C A. Percabangan
Perintah if dan if…else….dilakukan untuk melakukan operasi percabangan bersyarat. Pernyataan if mempunyai bentuk umum :
//pernyataan }; Contoh: if (a<0x08){ PORTC=0x50; };
Dalam contoh ini PORTC akan dikirim data 0x50 jika nilai a lebih kecil 0x08. Bentuk ini menyatakan , Jika kondisi yang diseleksi adalah benar (bernilai logika = 1), maka pernyataan yang mengikutinya akan diproses. Sebaliknya, jika kondisi yang diseleksi adalah tidak benar (bernilai logika = 0), maka pernyataan yang mengikutinya tidak akan diproses. Mengenai kodisi harus ditulis diantara tanda kurung, sedangkan pernyataan dapat berupa sebuah pernyataan tunggal, pernyataan majemuk atau pernyataan kosong. Sedangkan Pernyataan if-else memiliki bentuk :
if (kondisi) { //pernyataan a } else { //pernyataan b };
Artinya adalah pernyataan a akan dijalankan jika kondisi terpenuhi dan pernyataan b akan dijalankan jika kondisi tidak terpenuhi. dijalankan. Masing-masing pernyataan-a
dan pernyataan-b dapat berupa sebuah pernyataan tunggal, pernyataan majemuk ataupun pernyataan kosong.
Perintah percabangan if….else..dapat digantikan dengan perintah switch. Dalam pernyataan switch, sebuah variabel secara berurutan diuji oleh beberapa konstanta bilangan bulat atau konstanta karakter. Sintaks perintah switch dapat ditulis sebagai berikut:
Switch(variabel) {
case konstanta_1: statement; break; case konstanta_2: statement; break; case konstanta_3: statement; break; default: statement;
}
B. Looping (Pengulangan)
Looping adalah perulangan satu atau beberapa perintah sampai mencapai keadaan tertentu. Ada tiga perintah looping, yaitu: for …., dan do..while…. sintaks loop for dapat dituliskan sebagai berikut:
for (untuk pengulangan yang melakukan proses increment)
for(nama_variabel=nilai_awal;syarat_loop;nama_variabel++) }
statement_yang_diulang; } // untuk pengulangan yang melakukan proses decrement syarat_loop adalah pernyataan yang menyatakan syarat berhentinya pengulangan; biasanya berkaitan dengan variabel kontrol, nama_variabel++ dan nama_variabel--, menyatakan proses increment dan proses decrement pada variabel kontrol. Sedangkan perintah while dapat melakukan looping apabila persyaratannya benar. Sintaks perintah while dapat dituliskan sebagai berikut:
nama_variabel=nilai_awal; while(syarat_loop) { Statement_yang_akan_diulang: Nama_variabel++; }
Perintah while terlebih dahulu melakukan pengujian persyaratan sebelum melakukan looping. Perulangan yang belum diketahui berapa kali akan diulangi maka dapat menggunakan while atau do while.Pada pernyatan while, pemeriksaan terhadap loop dilakukan di bagian awal (sebelum tubuh loop). Pernyataan while akan diulangi terus menerus selama kondisi bernilai benar, jika kondisinya salah maka perulangan dianggap selesai. nama_variabel=nilai_awal; while(syarat_loop) { Statement_yang_akan_diulang: Nama_variabel++;
}
BAB III
PERANCANGAN DAN PEMBUATAN ALAT
3.1 Gambaran Umum
Pada bab ini akan dibahas mengenai perencanaan perangkat keras elektronik
(hardware) dan pembuatan mekanik robot, perancangan perangkat keras
disimulasikan terlebih dahulu menggunakan software Proteus. Sedangkan untuk pembuatan perangkat lunak dirancang dengan menggunakan bahasa pemrograman C dan software pendukungnya yaitu CodeVision AVR.
Pembuatan perangkat mekanik terdiri dari perencanaan desain mekanis yang mendukung aksi robot. Perencanaan ini terdiri dari pengaturan peletakan posisi sensor agar robot dapat bergerak dengan baik dan terdiri dari beberapa sensor pendukung diantaranya satu LDR yang dipasang di atas badan robot bagian depan, sensor garis yang menggunakan sensor Infra Red. Pada bagian output terdiri dari 2 motor DC untuk roda dan 1 motor DC untuk kipas. Pemasangan motor untuk menggerakkan roda utama terdiri dari 2 roda belakang sedangkan 2 roda depan hanya mengikuti sehingga roda bebas bergerak agar menjadi lebih dinamis dan seimbang. Pengaturan tata letak sistem lengan penjepit juga diperhatikan sehingga gerakan sesuai dengan yang diinginkan.
Sedangkan pembuatan perangkat keras elektronik terdiri dari pembuatan rangkaian sistem minimum mikrokontroller sebagai pusat pengontrolan gerak robot. pembuatan rangkaian sensor, panggerak kipas dan pembuatan rangkaian driver motor DC.
3.2 Konfigurasi Sistem
Robot ini terdiri dari sebuah lengan penjepit yang dapat bergerak naik-turun, ke kiri dan ke kanan dengan menggunakan motor Servo, dua buah roda penggerak yang terletak disebelah kiri dan kanan robot. Sebagai penggerak digunakan motor DC dengan torsi yang cukup besar dan 2 buah roda yang di letakan di depan, robot dapat bergerak secara otomatis sesuai arena yang dibuat dengan mengandalkan empat pasang sensor garis yang ada dibawah robot, sensor tersebut dapat mendeteksi keberadaan garis hitam yang dibuat pada permukaan putih. Semua sistem diatas dikontrol oleh sebuah mikrokontroller ATmega16 sesuai dengan instruksi program yang dituliskan pada mikrokontroller tersebut.
3.3 Diagram Blok Sistem
Gambar berikut ini memperlihatkan diagram blok sistem keseluruhan dari Line Follower Robot Peniup Lilin Berlengan Satu, dapat dilihat pada gambar 3.1.
Dari blok diagram diatas dapat dilihat bahwa mikrokontroller bertindak sebagai pusat dari semua sistem, mikrokontroller mengatur semua kegiatan input/output sistem. Sensor garis berfungsi memberikan informasi kepada mikrokontroller berupa sinyal input 5 volt untuk kondisi high dan 0 volt untuk kondisi low. Sensor ini bekerja berdasarkan pembacaan garis hitam yang dibuat pada arena yang memiliki permukaan putih, apabila sensor mengenai warna hitam maka mikrokontroller akan mendapat kondisi high, dan sebaliknya apabila sensor mengenai warna putih maka mikrokontroller akan mendapat kondisi low.
Semua sinyal input tersebut kemudian diproses oleh mikrokontroller dan dikeluarkan kembali dalam bentuk sinyal output yang mengatur kerja dari sistem output, yaitu motor servo dan motor DC. Untuk mendapatkan putaran motor DC secara CW (clock wise) maupun CCW (counter clock wise), digunakan driver motor DC. Motor DC ini digerakan menggunakan IC driver motor L298 yang mampu memberikan arus maksimum sebesar 1A ke tiap motor.
3.4 Perencanaan Perangkat Keras Elektronik
3.4.1 Rangkaian Sistem Minimum Mikrokontroller ATmega16
Rangkaian sistem minimum mikrokontroller berfungsi sebagai pengontrol semua peralatan yang ada dalam sistem dengan acuan pembacaan data dari sensor garis maupun motor servo. Pembacaan dari sensor garis dan sevo garis langsung dimasukkan ke dalam mikrokontroler yang kemudian diproses dan dijadikan acuan untuk pengambilan keputusan, yang dalam hal ini adalah menentukan arah pergerakan robot dan kerja dari lengan penjepit. Subrutin inilah yang nantinya mengontrol perputaran dari motor DC pada Line Follower Robot Peniup Lilin Berlengan Satu .
Rangkaian minimum sistem mikrokontroler ini terdiri dari rangkaian osilator, rangkaian reset dan rangkaian power supply seperti yang ditunjukkan oleh gambar 3.2 berikut.
Gambar 3.2 Sistem Minimum rangkaian Mikrokontroler Atmega16
Pada tugas akhir ini dibuat rangkaian osilator yang berasal dari kristal 11.0592 MHz, sedangkan nilai kapasitor C1 dan C2 masing-masing 33pf. Kapasitor yang digunakan merupakan kapasitor keramik (non-polar). Untuk rangkaian reset, reset pada mikrokontroller terjadi apabila ada logika “1” (high) pada pin RESET. Setelah kondisi pin RESET kembali “0” (low), maka mikrokontroller akan menjalankan program kembali.
Sebagai sumber tegangan +5 volt yang dibutuhkan oleh rangkaian mikrokontroller, digunakan IC regulator 7805 yang berfungsi menurunkan tegangan input sebesar 12 volt dari power supply (accu). Pada kaki input maupun output IC regulator dipasangkan kapasitor (elco) dengan nilai masing-masing 22µf/50V dan 22µf/16V.
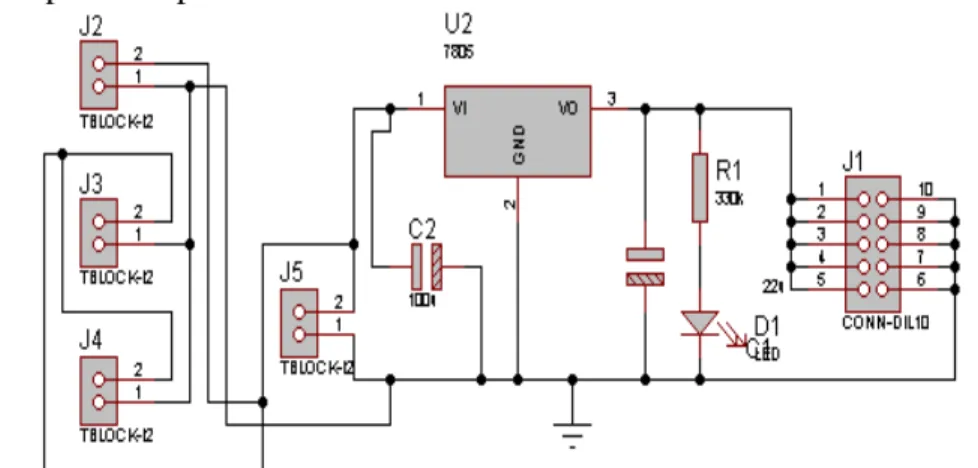
3.4.2 Perancangan rangkaian power suplly
Rangkaian power suplly berfungsi sebagai sumber tegangan beberapa rangkaian pendukung robot. Seperti LDR, sensor garis, motor servo dan driver motor dc. Rangkaian power suplai yang dibuat untuk menghasilkan tegangan 5 volt dan 12 volt. Untuk mengahasilkan tegangan 5 volt pada rangkaian power suplai digunakan regulator 7805. Regulator 7805 dapat menurunkan tegangan dari baterai 12 volt ke 5 volt. Tegangan 12 volt dari baterai diturunkan dengan 7805, tegangan tersebut dapat langsung disambungkan pada mikrokontroller yang membutuhkan tegangan 5 volt. . Ic 7805 tidak memerlukan komponen tambahan untuk meregulasi tegangan, membuatnya mudah digunakan, ekonomis dan hemat ruang. Regulator tegangan lainnya mungkin memerlukan komponen tambahan untuk membantu peregulasian tegangan. Bahkan untuk regulator bersakelar, selain membutuhkan banyak komponen, juga membutuhkan perencanaan yang rumit. Seri ic 7805 memiliki rangkaian pengaman terhadap pembebanan lebih, panas tinggi dan hubungsingkat, membuatnya hampir tak dapat dirusak. Dalam keadaan tertentu, kemampuan pembatasan arus peranti 7805 tidak hanya melindunginya sendiri, tetapi juga melindungi rangkaian yang ditopangnya. Dari gambar 3.3 dapat dilihat gambar rangkain power suplai.
Rangkaian power supplay pada gambar 3.2 memiliki 3 channel 12 volt dan 5 channel 5 volt dari satu input baterai 12 volt. Digunakan satu buah led sebagai indikator bahwa adanya tegangan 5 volt pada konektor. Tegangan masukan harus lebih tinggi dari tegangan keluaran (biasanya 2-3 volt). Ini membuatnya tidak tepat digunakan untuk penggunaan tegangan rendah, misalnya regulasi 5 volt dari sumber baterai 6 volt tidak akan bekerja dengan 7805. Sebagaimana regulator linier lainnya, arus masukan sama dengan arus keluaran. Karena tegangan masukan lebih tinggi daripada tegangan keluaran, berarti ada daya yang diboroskan. Dalam perencanaan rangkaian regulator digunakan software isis proteus dalam membuat rangkaian power
supply. Setelah dibuat dalam program isis proteus, dibuat rangkaian layout pcb
menggunakan ares proteus.
3.4.3 Rangkaian Sensor Garis
Sensor adalah bagian dari robot yang berinteraksi dengan lingkungan sekitar robot. Sensor dapat mendeteksi kondisi tertentu pada lingkungan sekitar robot. Sensor akan memberikan sinyal tertentu atas kondisi lingkungan yang dideteksinya. Beberapa contoh kondisi yang dapat dideteksi oleh sensor misalnya adalah tingkat intensitas cahaya.
Pada rangkaian sensor garis ini digunakan pasangan LED Superbright sebagai pemancar (transmitter) dan Photodioda sebagai penerima (receiver). Komponen elektronika yang digunakan sebagai transmitter adalah IR LED. IR LED digunakan sebagai transmitter dengan alasan dapat memancarkan cahaya. Komponen elektronika yang digunakan sebagai receiver adalah photodioda. Photodioda digunakan sebagai receiver dengan alasan dapat memberikan reaksi (perubahan tegangan) bila terjadi perubahan intensitas cahaya. Rangkaian sensor garis dapat dilihat pada gambar 3.4
Gambar 3.4 Rangkaian Sensor Garis
Prinsip kerja dari sensor ini memanfaatkan sifat cahaya yang dipantulkan, apabila sensor mengenai garis berwarna terang maka cahaya akan dipantulkan, sebaliknya apabila sensor garis berwarna gelap maka cahaya akan diserap. LED Superbright berfungsi sebagai sumber cahaya dan untuk menangkap pantulan cahaya dari LED Superbright digunakan Photodioda. Photodioda akan menerima sedikit cahaya pantulan apabila sensor berada diatas garis hitam, tetapi jika sensor berada diatas garis putih maka akan banyak cahaya yang diterima oleh Photodioda, berikut ilustrasi dari sensor. Gambar 3.5 dan 3.6.
Gambar 3.5 Sensor Mengenai Garis Hitam
Gambar 3.6 Sensor Mengenai Garis Putih
Sensor yang pasang pada robot ini adalah sensor garis. Sensor ini di letakan tepat di bawah badan robot. Sensor tersebut memiliki jenis dan cara kerja yang sama, yaitu dengan cara memantulkan cahaya dari IR LED ke suatu bidang dan menerimanya melalui sebuah photodioda.
mendeteksi jalur yang akan dilalui robot. Jalur robot adalah lintasan berupa garis berwarna hitam (berwarna gelap) yang terletak di atas bidang berwarna terang. Perpindahan posisi sensor yang asalnya berada di atas bidang yang berwarna terang ke atas bidang yang berwarna gelap akan mengakibatkan sensor mengirimkan sinyal yang berbeda ke Operational amplifier. Hal sebaliknya juga akan terjadi, bila sensor berpindah posisi yang tadinya berada di atas bidang yang berwarna terang ke atas bidang yang berwarna gelap maka akan terjadi pengiriman sinyal yang berbeda ke Operational amplifier.
Resistor yang dipasangkan pada LED berfungsi sebagai pembatas arus untuk menjaga arus LED dibawah arus maksimum, nilai R ditentukan oleh rumus berikut :
F F CC
I
V
V
R
=
−
Keterangan : R : Nilai Resistansi FI : Arus yang melalui LED
F
V : Tegangan LED (1.2 V – 1.3 V)
CC
V : Tegangan input
Sedangkan untuk resistor yang dipasangkan pada Photodioda berfungsi sebagai resistor beban (RL) yang membatasi arus (IE) pada Photodioda. Berikut rumus untuk menghitung nilai RL: L