PENDAHULUAN
Latar belakang
Tujuan Khusus
TINJAUAN PUSTAKA
Model Penyearah Dengan Space Vector PWM (SVPWM)
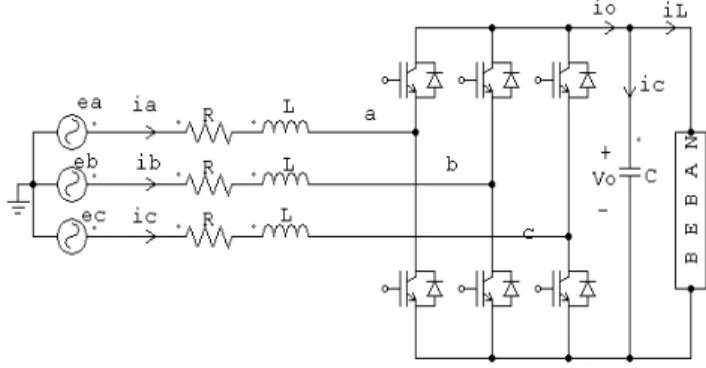
Penyearah aktif tiga fasa pada Gambar 2.1 menggunakan 6 buah saklar berupa komponen semikonduktor seperti transistor IGBT. Sakelar ini bekerja seperti ini dan memerlukan sinyal yang sesuai untuk menghidupkan (ON) dan mematikan transistor (OFF). Dengan metode konvensional SPWM (Sinusoidal Pulse Width Modulation), tegangan DC yang dihasilkan sekitar 78% dari kapasitas maksimum penyearah [K.
Vinoth Kumar (2010)] yang dapat menghasilkan tegangan keluaran DC hingga 90,6% dari kapasitas penyearah, sehingga meningkatkan efisiensi sekitar 15%. Posisi sakelar berpasangan (Sa dan Sa', Sb dan Sb', Sc dan Sc') diatur sedemikian rupa sehingga setiap pasangan tidak pernah ON atau OFF secara bersamaan. Artinya jika saklar Sa dalam keadaan ON, maka saklar Sa' dalam keadaan OFF atau sebaliknya.
Kendali Cerdas
Pada penelitian ini, kendali cerdas berbasis logika fuzzy digunakan untuk mengendalikan arus grid berdasarkan deviasi tegangan DC terhadap referensi. Logika fuzzy didasarkan pada seperangkat aturan (rules) yang ditentukan oleh komposisi aturan inferensi (Gambar 2.5). Dalam teknik penalaran fuzzy, diperlukan input pengukuran sistem (input dari unit kontrol logika fuzzy) dalam domain yang jelas diperlakukan sebagai fuzzy tunggal (single fuzzy).
7 Pada umumnya aturan fuzzy diekspresikan dalam bentuk logika “If – Then” yang merupakan dasar dari hubungan fuzzy. Basis pengetahuan fuzzy terdiri dari beberapa aturan fuzzy yang dikelompokkan dalam basis aturan fuzzy. Basis aturan adalah dasar untuk pengambilan keputusan atau inferensi proses, untuk mendapatkan tindakan sinyal kontrol keluaran dari keadaan input, yaitu x dan y, berdasarkan aturan.

Motor DC
TUJUAN DAN MANFAAT PENELITIAN
Tujuan Penelitian
Manfaat Penelitian
Penemuan model penyearah dengan metode kontrol baru yaitu Fuzzy yang diaplikasikan sebagai pengatur kecepatan motor DC. Sistem kendali penyearah menggunakan logika fuzzy yang dikembangkan pada penelitian ini diperoleh nilai THD (Total Harmonic Distortion) yang rendah, nilai Pf (Faktor Daya) mendekati satu dan tegangan DC stabil yang bervariasi untuk pengaturan kecepatan motor DC. Pada tahap ini dilakukan pengujian terhadap penyearah kontrol fuzzy dengan mempertimbangkan beban motor DC dan dilakukan pengamatan terhadap kecepatan motor DC dengan tegangan DC variabel.
Luaran yang diharapkan dari penelitian pada tahun kedua ini adalah menghasilkan hasil pengujian secara real time pada fuzzy control rectifier sebagai pengatur kecepatan motor DC dan publikasi hasil penelitian ini pada seminar nasional/internasional atau jurnal nasional/internasional. Pengembangan penyearah ini bertujuan untuk menghasilkan model penyearah yang dapat digunakan dalam dunia industri khususnya untuk mengatur kecepatan motor DC. Simulasi pada penyearah sebagai pengatur kecepatan motor DC dilakukan pada kondisi normal dan kecepatan motor DC berubah (kondisi gangguan).
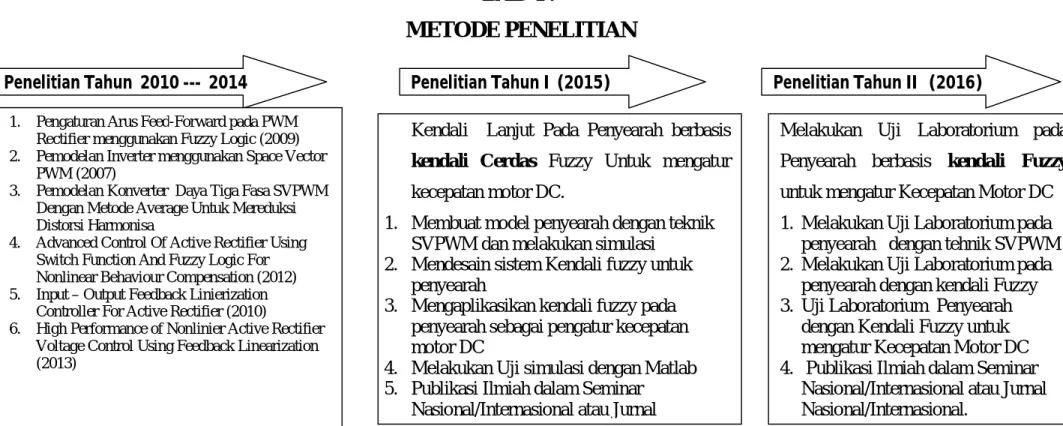
METODE PENELITIAN
Bagan Alir Penelitian
Percakapan dengan tim peneliti dan para ahli di bidang penyearah dan kontrol logika fuzzy serta pengetahuan tentang motor DC agar tahap penelitian di tahun II dapat berjalan dengan lancar. Penelitian ini mengembangkan sistem penyearah menggunakan metode kontrol lanjutan (Fuzzy Logic Control) untuk menghasilkan tegangan DC yang stabil dengan ripple yang kecil dan bervariasi sehingga dapat digunakan untuk mengatur kecepatan motor DC. Kontrol logika fuzzy digunakan untuk mengatur arus jaringan sehingga diperoleh THD (Total Harmonic Distortion) yang rendah, faktor daya mendekati satu, dan kondisi tegangan DC tetap stabil walaupun kecepatan motor DC berubah.
Sehingga model penyearah ini nantinya dapat digunakan di industri sebagai pengatur kecepatan motor DC dan sebagai sumber DC yang stabil yang dapat digunakan untuk energi terbarukan. Masoud Hajihashemi, Ali Nazeran Motlagh (2009), "Peningkatan Penyearah Peningkat PWM 3-Fase pada Jaringan Tidak Seimbang dengan Pengontrol Fuzzy", Konferensi Internasional tentang Teknik Elektro. Dong-Eok Kim, Dong-Choon Lee (2007), “Kontrol Linierisasi Umpan Balik Konverter PWM AC/DC Tiga Fasa dengan Filter Input LCL”, Konferensi Elektronik Daya Internasional ke-7.
High performance of PWM voltage source converter using fuzzy logic for adjustable speed DC motor. But using PWM to control the speed of DC motor will produce current harmonics ot the grid and unstable of the DC voltage as a DC supply for DC motor. The proposed system also developed a fine logic to control the amplitude of the line current based on the deviation of the DC voltage.
The input to the fuzzy logic controller includes voltage variation from the reference (e) and the deviation (Ae), while the output was the variation. of the current amplitude AI. The simulation output of the DC motor speed vs. time response is in fig. 14 shows the stability of the DC motor speed under different values of the DC voltage in Eq.

Kegiatan-kegiatan Penelitian Tahun I
Indikator Luaran Yang Dicapai Tahun I
Speed control of DC motor can be done in several ways, including by regulating the armature voltage (DC voltage). The speed of an armature-controlled DC motor is controlled by the armature voltage Vu. As the armature rotates, a voltage proportional to the product of the flux and the angular velocity is induced in the armature.
The Fuzzy Logic Controller approach provides the opportunity to model a non-linear system based on knowledge of many non-well-defined relationships between the systems and to design a controller that adapts to multiple working conditions.
HASIL DAN PEMBAHASAN
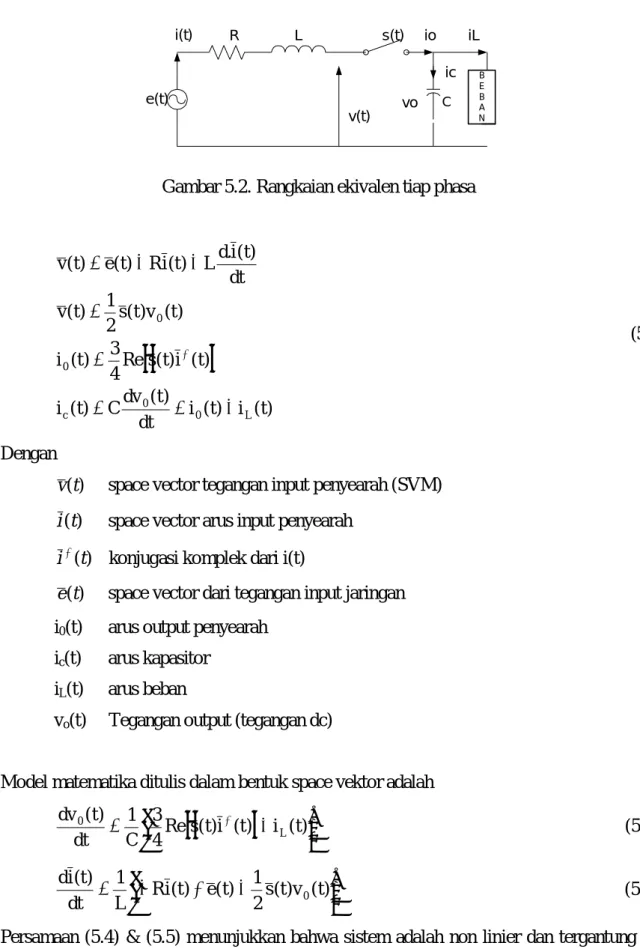
Pemodelan Sistem Penyearah dengan Teknik SVPWM
Buat model sistem yang terdiri dari rangkaian tiga fasa yang diwakili oleh tiga sumber tegangan yang terhubung di bintang ei, tiga impedansi R-L, penyearah tiga fasa dengan kontrol PWM, kapasitor pemulusan dan beban, seperti yang ditunjukkan di bawah ini. Penyearah aktif dimodelkan menggunakan tiga fungsi kopling kontinu 1 .. k=a,b,c), yang didefinisikan sebagai penyearah vektor ruang.
Desain Kendali Logika Fuzzy Arus
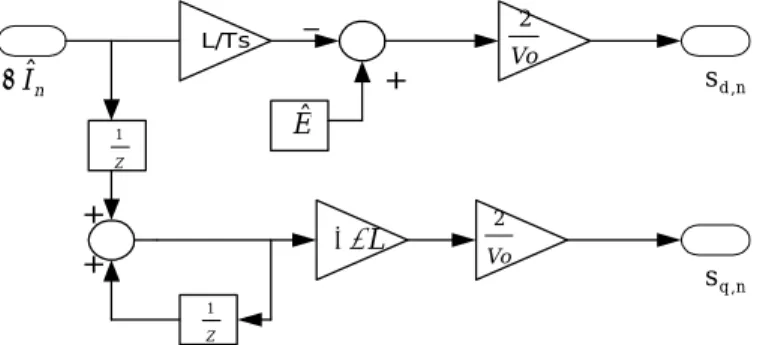
Dari persamaan (5.14), pilih kecepatan sudut rotasi dalam kerangka d-q dan dengan sumbu d tegak lurus terhadap vektor tegangan kisi en. Persamaan (5.16) adalah diagram blok transformasi dasar untuk menghitung vektor switching, dengan diagram blok yang ditunjukkan pada Gambar 5.3. Komponen d dan q dari vektor pensakelaran kemudian ditransformasikan menjadi komponen dan dalam kerangka stasioner yang digunakan sebagai input ke logika fuzzy modulasi.
Kontrol logika fuzzy didasarkan pada perubahan tegangan DC (tegangan keluaran) dari nilai referensi (o) dan perubahan waktu pengambilan sampel (o). Logika fuzzy ini bertujuan untuk memperkecil o dengan mengatur amplitudo arus input (o) Variabel input logika fuzzy adalah o dan (o). Aturan logika fuzzy yang ditunjukkan pada tabel 5.1 menggunakan metode min-max, sedangkan keluaran logika fuzzy adalah Iˆ yang ditunjukkan pada gambar 5.6.
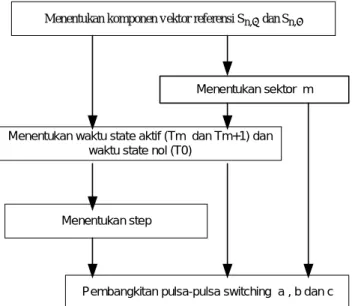
Metode SVPWM
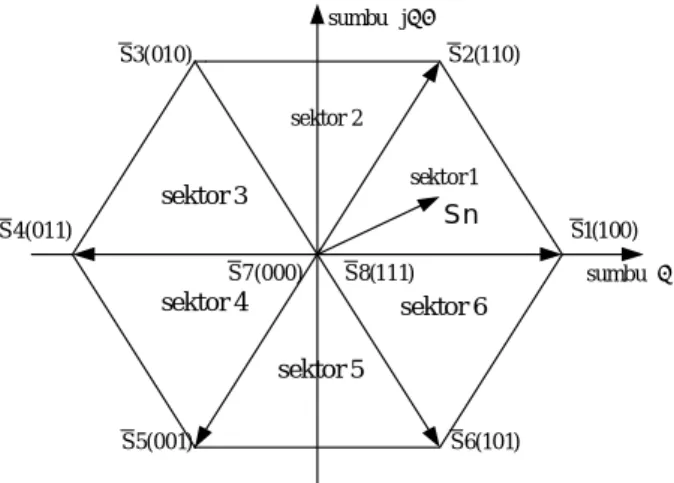
Gambar (5.7), menunjukkan pergeseran vektor ruang; di mana vektornya stasioner, artinya tidak berputar sesuai dengan waktu, sehingga argumen dan besarnya tidak berubah. Penentuan posisi sektor dengan memperhatikan karakter sab,n , sbc,n dan sca,n , dapat dilihat pada tabel (5.2.). Menghitung waktu keadaan adalah melakukan proses menghitung lama waktu dari keadaan aktif dan keadaan nol.
Untuk melakukan proses perhitungan lama waktu dari keadaan aktif dan keadaan nol yaitu memperhatikan segitiga pada sektor I. Untuk sektor lainnya digunakan tabel berikut untuk menghitung T2,n: Tabel (5.3) Penentuan waktu T2,n di semua sektor. Saat melakukan proses perhitungan untuk T1,n, fungsi trigonometri digunakan, yang tentu saja membutuhkan waktu yang relatif lama dibandingkan dengan waktu yang tersedia, karena waktu pemrosesan perhitungan dari transformasi tegangan ke pembangkitan pulsa tidak dapat melebihi periode pengambilan sampel.
25 Maka untuk mengatasi masalah ini digunakan logika modulasi fuzzy yang implementasinya sederhana dan dapat mengatasi ketidaklinieran penyearah. Dari waktu T1,n ,T2 ,n dan T0 dapat ditentukan kombinasi sakelar mana yang harus diaktifkan sesuai dengan statusnya dan durasi waktu saat status aktif dan statusnya nol. Penentuan langkah yang digunakan adalah urutan simetris, urutan kegiatan state dimulai dari state 7, dengan durasi T0/4, state 1 dengan durasi T1/2, state 2 dengan durasi T2/2, state 7 dengan durasi T1/2, state 2 dengan durasi T2/2, state 7 dengan durasi durasi T0/2, set 2 dengan durasi T2/2, status 1 dengan durasi T1/2, dan berakhir pada status nol dengan durasi T0/4.
Sakelar a akan on (yang juga berarti sakelar a' nonaktif) jika t = Ta on, dihitung dari awal periode sampling. Diagram waktu untuk sakelar a, b, c penyearah dapat digambarkan seperti yang ditunjukkan pada Gambar 5.10. Sedangkan waktu penyalaan yaitu Ta on , Tb on , Tc on pada sektor I sampai dengan sektor VI disajikan pada Tabel 5.5.
Ini menghasilkan sinyal PWM yang merupakan kombinasi keadaan berdasarkan posisi dan langkah dari vektor referensi.

Beban Motor DC
Hasil Simulasi
Thank you for submitting your manuscript entitled "High Performance of PWM Voltage Source Converter Using Fuzzy Logic for Adjustable Speed Dc Motor" .. to our journal International Review on Modeling and Simulations QREMOS). In accordance with the review procedures, your proposal will be sent to the editor-in-chief, who, after assessing the suitability of the paper for publication, will assign three reviewers for a comprehensive evaluation. DC voltage control becomes easier and more efficient by using PWM-VSC is the cycle duration setting.
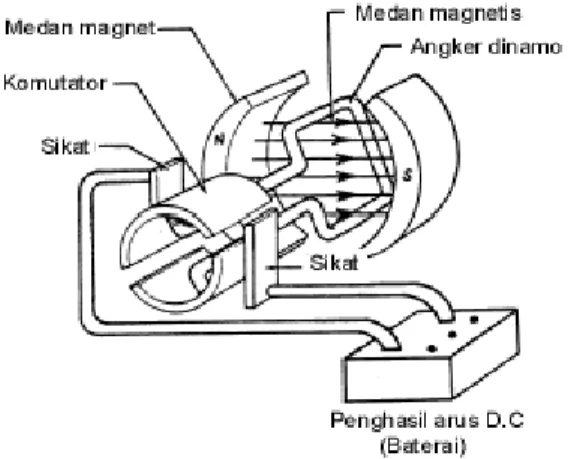
This paper proposed the fuzzy logic controller to overcome the nonlinearity of three-phase PWM-VSC. Proposed Control Strategy The speed of a DC motor can be controlled by setting the voltage applied to fhe terr*ii al. A DC motor consists of stator and armature windings in the rotor as shown in l'ig.

RENCANA TAHAPAN BERIKUTNYA
Kegiatan-kegiatan Penelitian Tahun II
Pengujian ini dilakukan untuk mengetahui kinerja model penyearah dengan kontrol fuzzy secara real time. Pada pengujian ini perlu dibuat penyearah tiga fasa dengan komponen pensaklaran berupa komponen IGBT yang dilengkapi dengan driver tegangan tinggi kemudian dihubungkan dengan tegangan AC tiga fasa dari PLN sebagai sisi masukan dan pada sisi output terhubung ke kapasitor. Kemudian dilanjutkan dengan menggabungkan rectifier dengan Fuzzy control yang tersimpan di komputer dalam program Matlab melalui peralatan interface (PCI-6221-NI) dan dirangkai menjadi rangkaian sistem rectifier berbasis Fuzzy control sebagai pembangkit variabel tegangan searah yang stabil dan rendah. THD.
Pada tahap ini dapat dilakukan pengamatan terhadap variabel tegangan DC pada sisi keluaran penyearah dan THD arus pada sisi jaringan. Hasil pengujian dibandingkan secara real time dengan hasil simulasi sistem pada tahun pertama kemudian dianalisis. Pada tahap ini dibuat karya ilmiah untuk mempublikasikan hasil penelitian yang diperoleh pada seminar nasional internasional atau jurnal nasional/internasional.
Indikator Luaran Yang Dicapai Tahun II
Jadwal Penelitian Tahun II
KESIMPULAN DAN SARAN
Kesimpulan
Saran