교수님 덕분에 대학원 2년이 아깝지 않게 느껴졌다. 그 원동력이 결국 성과를 낼 수 있었다.
서 론
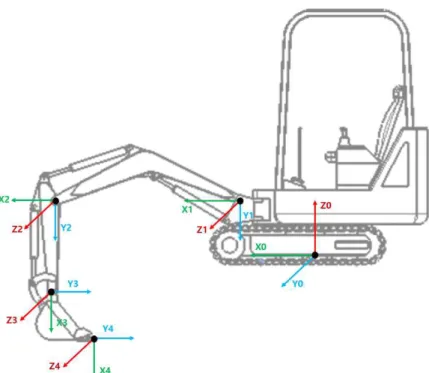
본 논문에서는 변환행렬의 특성을 이용하여 연결각을 구하였다. 가상 굴삭기 모델링은 Matlab & Simulink를 사용하여 수행되었습니다.
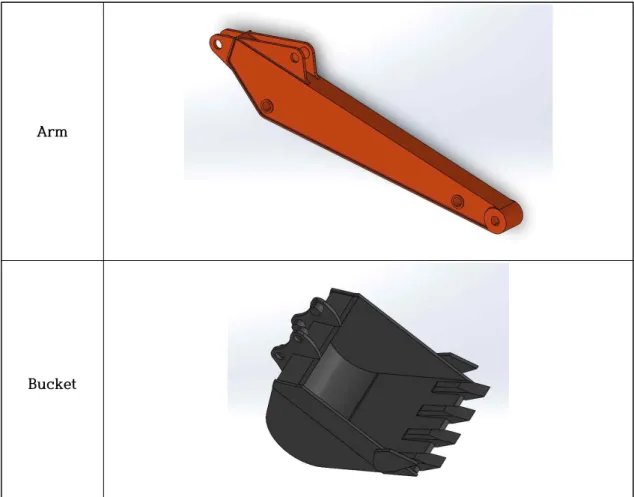
유압 굴착기
- Forward Kinematics
- Inverse Kinematics
- Dynamics
- Hydraulic System
- Pump
- 방향제어밸브
- 유압 실린더
액추에이터로는 주로 유압 실린더와 유압 모터가 사용됩니다. 본 논문에서는 D사의 1.5톤 크롤러형 굴삭기를 모델화하여 메커니즘과 유압시스템에 대한 시뮬레이션 및 테스트를 수행하였다.
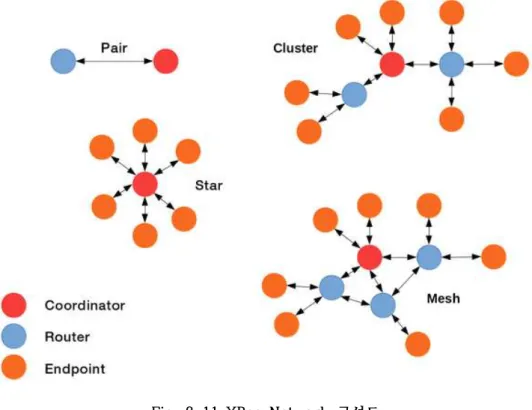
무선 통신
- Wi-Fi
- RF(Radio Frequency)
- DataBase Management System
SQL(Structured Query Language)은 DBMS에서 데이터를 구성, 관리 및 사용하는 데 사용되는 언어입니다. 따라서 장비 데이터를 대용량으로 추출하여 관리해야 하므로 본 문서에서는 RDBMS를 이용하여 데이터베이스를 관리한다.
Kalman Filter
변수 는 이전 단계에서 계산된 값을 사용하고, 과 는 Kalman Filter 알고리즘 외부에서 미리 정의된 값입니다. 3단계는 입력된 측정값을 기반으로 추정값을 계산합니다.
Machine learning
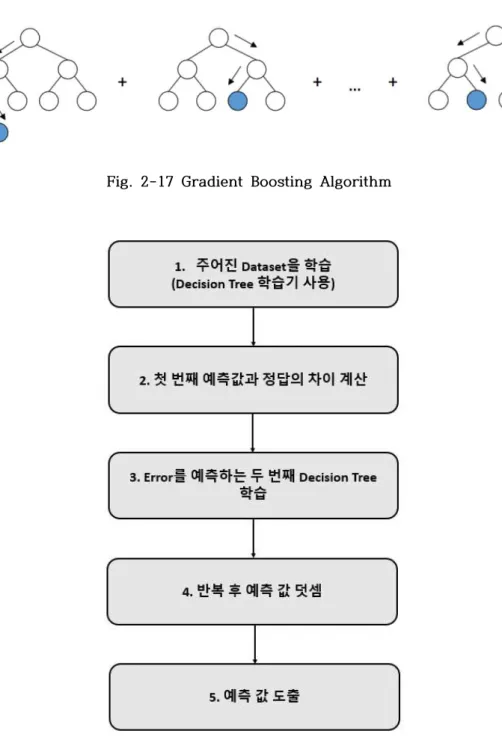
- Gradient Boosting Algorithm
머신 러닝에서 부스팅(boosting)은 성능이 다소 낮은 학습자를 결합하여 보다 정확하고 강력한 학습자를 만드는 방법을 의미합니다. Gradient Boosting 알고리즘은 이전 Weak Learner에서 발생한 에러를 다음 Weak Learner에 적용하는 것이라고 할 수 있다.
시뮬레이션 및 결과
하드웨어
- 조이스틱
- MCU(Micro Controller Unit)
조이스틱은 붐, 암, 몸체의 동작을 제어하며 포텐셔미터 방식의 조이스틱을 사용합니다. 상용 MCU인 라즈베리파이를 이용하여 인터넷 서버를 구축하고 데이터를 주고받는다. 그러나 Raspberry pi에는 ADC가 내장되어 있지 않습니다.
따라서 시뮬레이션은 조이스틱의 값을 읽기 위해 또 다른 MCU인 아두이노를 이용해 조이스틱의 값을 읽어서 라즈베리 파이에 값을 전달한다.

Flow Chart
시뮬레이션 모델
- 유압 회로
- Pump
- 방향제어밸브
- 유압 실린더
- 기구학
- 결합 모델
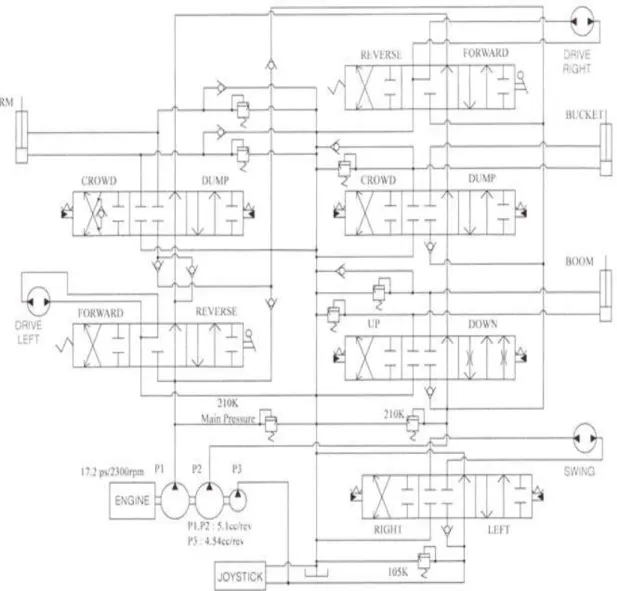
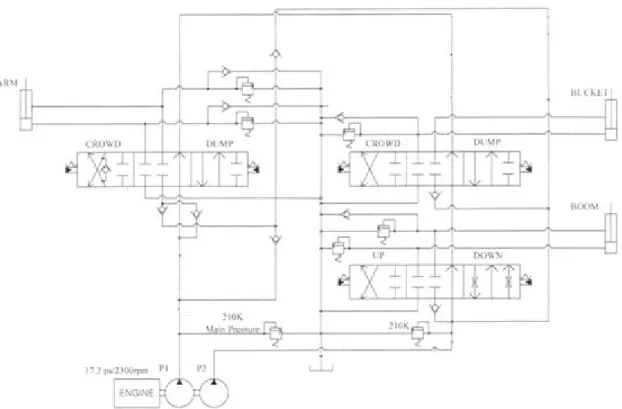
그림 3-8에서 굴삭기의 작동과 관련된 펌프, 밸브, 실린더를 SimHydraulics로 모델링하고 이론적인 계산식과 비교하여 타당성을 검증하였다. 3-18과 같은 파라미터를 반영하여 실제 굴삭기 밸브도 유사하게 모델링하였다. 펌프, 밸브, 실린더는 SimHydraulics를 이용하여 모델링하였으며, 1.5톤 가상굴삭기의 전체적인 유압회로도는 Fig.
Simulink에서 구현된 운동학적 모델링이 그림 1에 나와 있습니다. 앞 절에서 모델링한 유압계통과 기구학계통을 모델링하고 이를 조합하여 가상 굴삭기를 생성하였다.
시뮬레이션 결과
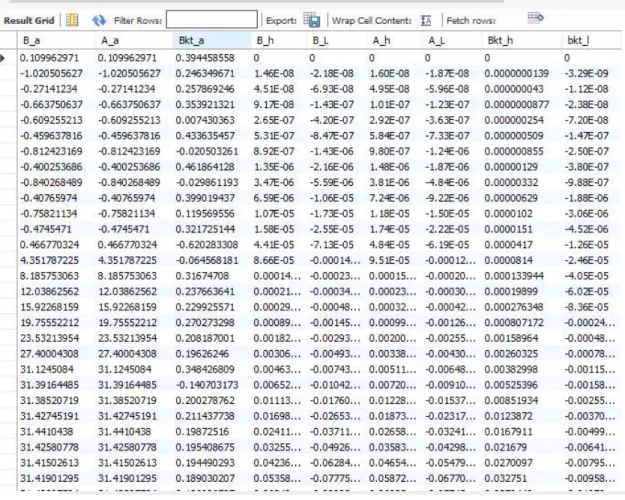
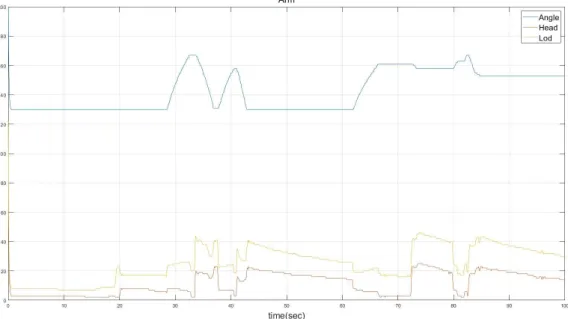
또한 원격 측정이 잘 되었는지 확인하기 위해 Multi-Body Modeling에서 관절의 각 각도에 대한 스코프를 부착하여 관절에 대한 각도 값을 구하였다. 유압회로에서는 작업장치의 실린더에 유압센서를 부착하여 작업장치 내의 실린더의 압력을 구하였다. Python을 사용하여 Simulink에서 획득한 각 관절의 각도와 작업 단위의 압력 데이터를 MySQl 서버에 저장했습니다.
시뮬레이션 결과 원격지에서도 굴삭기의 센서 데이터가 잘 저장되는 것을 확인할 수 있다. 또한 저장된 데이터를 활용하여 각 작업 단위 간의 일관성을 확인할 수 있어 측정 센서 사용이 불가능할 때 기계 학습 기법의 적용이 가능함을 나타냅니다.
EPPR Valve
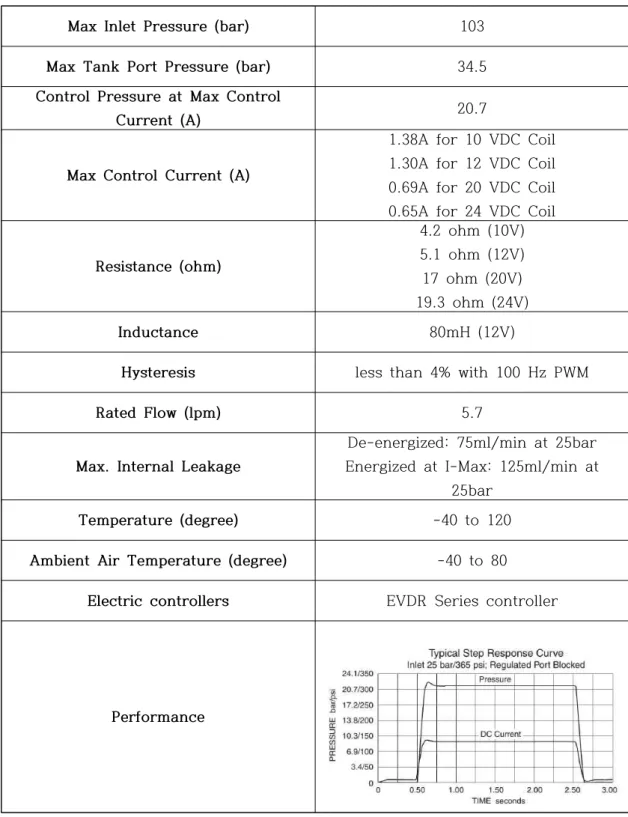
굴삭기에서 작업장비와 차체 상부는 유압레버로 제어하는데 이 구조는 비례감압밸브로 구성되어 있고 이들 밸브 중 일부가 연결되어 MCV의 입력신호를 제어한다. 원격 제어를 위해 이러한 유형의 유압 밸브는 전기 신호를 통해 제어할 수 있어야 합니다. 따라서 본 논문 시스템에서는 기존 1.5톤 굴삭기에 부착된 EPPR 밸브를 이용한 원격제어를 수행한다.
그림 4-9에 표시된 Hydraforce EVDR1 컨트롤러는 EPPR 밸브를 제어하는 데 사용되었습니다. 입력 전압이 컨트롤러에 들어가면 전류가 흐르고 이에 의해 EPPR 밸브를 제어할 수 있습니다.
RC Filter
RF 통신 모듈
Joystick
Kalman Filter
실험 결과
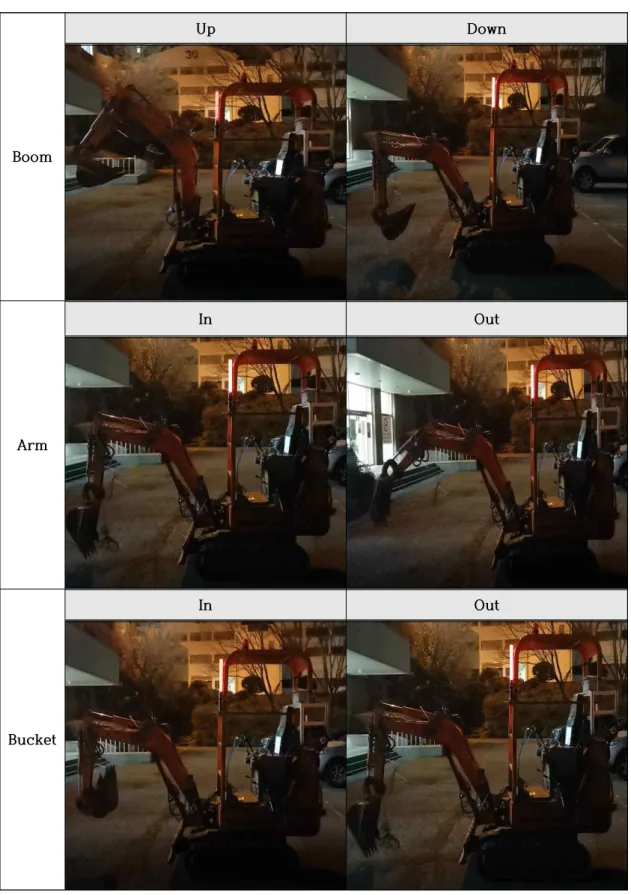
원격 조종 차량 테스트 결과 원격지에서 데이터베이스를 통해 조종 스틱의 움직임에 따라 EPPR 밸브에 전기 신호를 보내 굴삭기를 운전할 수 있음을 확인했다.
Machine learning
- EDA (Explorer Data Analysis)
- 복구 결과
EDA 결과 Boom, Arm, Bucket 각 관절의 각도는 실린더의 압력과 밀접한 관계가 있으며 다른 관절의 각도와 실린더의 압력은 영향을 미치지 않는 것을 확인할 수 있었다. Boom Head, Arm Load, Bucket Load 센서의 데이터가 50초 후에도 들어오지 않는다고 가정하고 Gradient Boosting Algorithm을 적용하여 복구하였으며, 원본 데이터와 비교한 결과는 Fig. 복원 결과 Gradient Boosting Algorithm을 적용한 데이터와 원본 데이터의 형태가 유사함을 알 수 있다.
즉, 원격지에서 센서 데이터를 수집할 때 데이터가 제대로 수신되지 않으면 기계 학습 알고리즘을 적용하여 레벨을 예측할 수 있음을 의미합니다.
무선 통신 속도를 감안할 때 향후 데이터를 더 빠르게 교환하려면 최적화 작업이 필요할 것입니다. 박, "포스피드백제어를 이용한 유압식 굴삭기의 원격작동 설계", 대한전기학회지, pp. 안, "고위험 작업용 원격제어 굴착기에 관한 연구," 제어로봇시스템학회, pp.
Han, “Development of Installation Control System for Remote Control Excavator,” Korean Society of Mechanical Engineers Conference, p. Kim, “Study on Driving Algorithm and Communication Features for Remote Control of Mini Excavator,” Journal of Drive and Control, Vol.15, no. Yang, “Hydraulic Simulation Study of Automatic Excavator System”, Transactions of the Korean Society of Mechanical Engineers – A, Vol.32, No.11, p.
Recently, the technology of the excavator remote system has been developed, so that it is possible to send and receive image information using an ultra-long-range remote control of the camera and a camera that uses thousands of kilometers away using 5G communication technology.
그림 목차