In the early stages, classical methods such as PD, PID controller were used to control the stabilization of the inverted pendulum system. The proposed method is applied to an inverted pendulum system, and the control efficiency is demonstrated through simulation.
연구 배경
연구 내용과 구성
3장에서는 설계하고자 하는 가변조합 퍼지 제어기의 기초가 되는 퍼지 이론과 퍼지 논리 시스템을 설명한다. 4장에서는 도립진자 시스템을 제어하기 위한 두 가지 유형의 퍼지 제어기를 설계한다. 일반 퍼지 제어기와 본 논문에서 제안하는 상태변수 조합 퍼지 제어기이다.
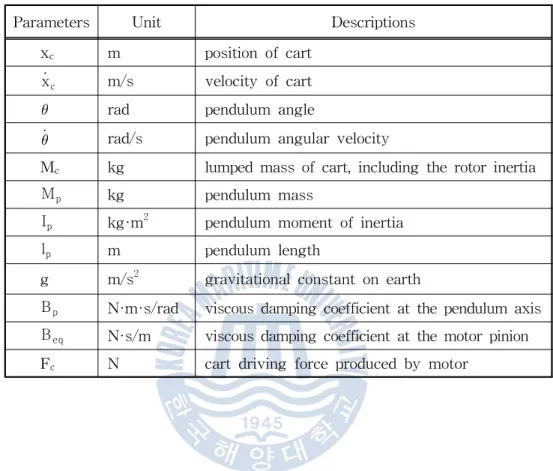
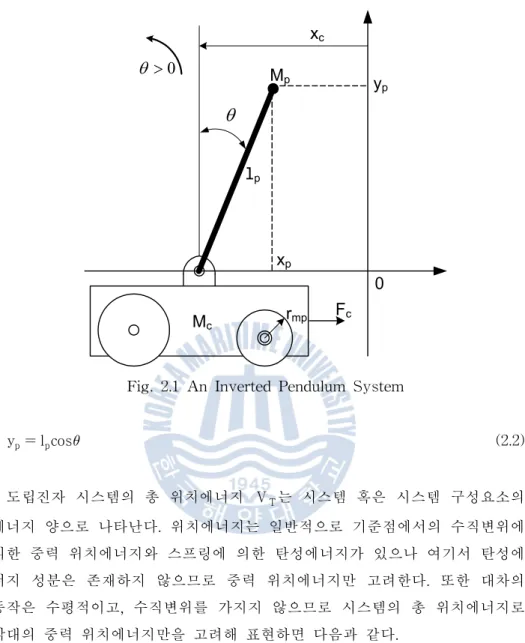
도립진자 시스템의 비선형 모델
운동에너지 Tpr은 다음과 같이 계산할 수 있습니다. 따라서 도립진자계의 총 운동에너지 TT는 다음과 같다.
구동부를 포함한 도립진자 시스템의 선형모델
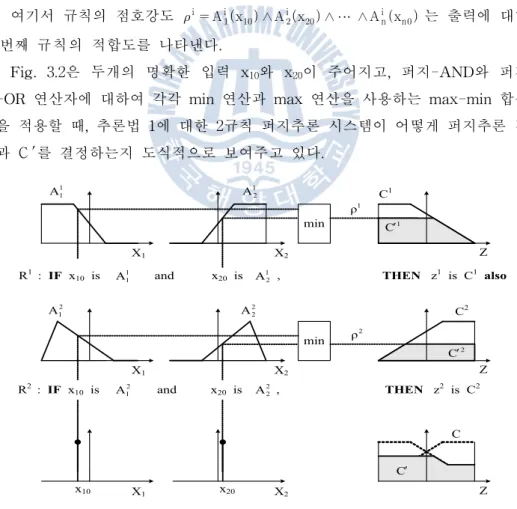
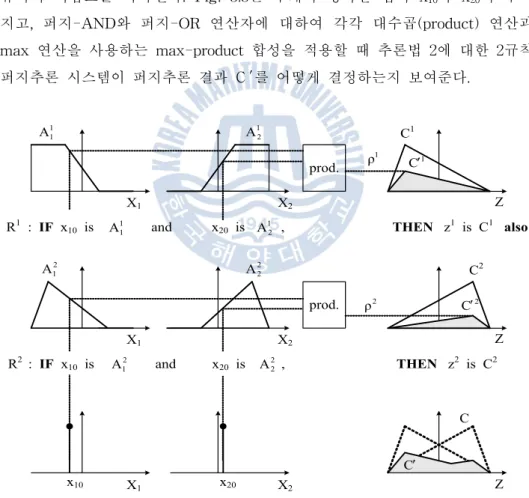
퍼지이론
퍼지집합
만약에 Xn의 퍼지 부분집합으로 다음과 같이 표현된다.
R과 S가 다음에 정의된 퍼지 관계인 경우
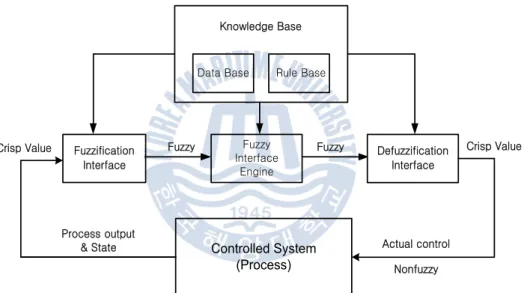
퍼지로직 시스템
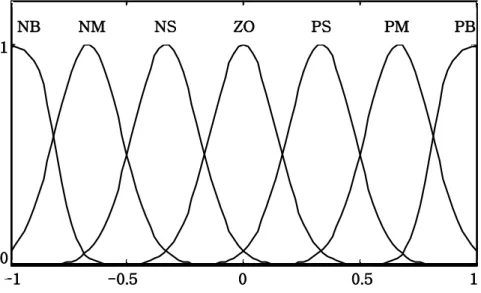
그리고 각 퍼지집합에는 선택된 소속함수의 종류와 형태에 따라 특성을 부여하여 수치로 변환한다. 규칙 베이스는 모호한 제어 규칙과 언어적 모호성에 대한 입력 및 출력 변수를 선택하는 것입니다. 규칙 베이스의 퍼지 모니터를 사용하여 퍼지 입력에서 퍼지 출력을 추론하는 기능이 있습니다.
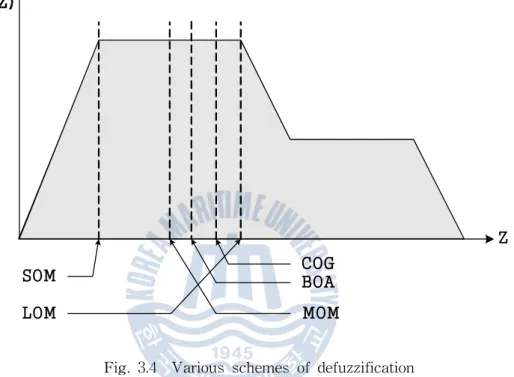
역퍼지화 부분은 추론 엔진에서 도출된 퍼지 출력의 결과를 명확한 값으로 변환하는 부분입니다. 전통적인 퍼지 컨트롤러 구성은 오류 및 오류 변화율 신호를 입력으로 사용하는 2차원 퍼지 제어를 사용합니다.
변수조합 퍼지 제어기 설계
본 논문에서는 도립진자의 상태변수를 퍼지 제어기의 입력으로 사용하여 도립진자를 제어하는 퍼지 제어기를 설계하는 것을 목표로 한다. 따라서 이러한 단점을 해결하기 위해 본 논문에서는 4개의 상태변수를 2개의 새로운 신호로 결합하는 FCSC(State Variables Combination) 설계 방법을 기반으로 한 퍼지 제어기를 제안하고자 한다. 비교를 위해 위에서 설명한 전통적인 유형의 퍼지 제어기를 설계하고 이를 역진자 시스템에 적용하여 제어 성능을 제어합니다.
퍼지 제어기의 변수 조합은 표 4.1과 같은 조건으로 설정되며 입출력 변수는 다음과 같다. 이와 같이 설계된 가변조합 퍼지제어기의 제어시스템은 그림 1과 같다.
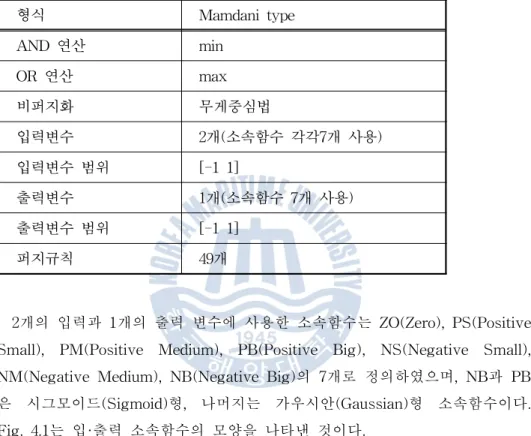
일반적인 퍼지 제어기 설계
2장에서는 본 논문의 제어 대상인 역진자 시스템의 비선형 모델과 이를 선형화한 선형 모델을 구하였다. 또한 4장에서는 도립진자 시스템을 제어하기 위한 가변 조합 퍼지 제어기를 설계하여 기존 퍼지 제어기의 문제점을 개선하였다. 그리고 비교를 위해 기존 퍼지 컨트롤러도 설계되었습니다.
이제 5장에서는 4장에서 제안한 소프트 컨트롤러의 조합변수에 2장에서 도출된 비선형 모델을 적용하여 제안한 방법의 유효성을 검증하고, 비교를 위해 설계된 일반 소프트 컨트롤러의 응답을 검토한다. . .
도립진자 시스템의 비선형 모델
예상대로 대차의 위치는 계속해서 높아지는데, 진자가 아래로 떨어지며 좌우로 격렬하게 흔들리는 것을 볼 수 있다.
응답특성
일반적인 퍼지 제어기 응답특성
그럼에도 불구하고 동일한 수의 멤버십 기능과 규칙이 사용되었습니다. 역퍼지화 방법으로는 중심법(centroid method)을 적용하였다. 이 경우에도 안정적인 응답 특성을 보여줍니다.
![Fig. 5.2 Control response of FLC when x(0)=[0.1 0 0.2 0] T](https://thumb-ap.123doks.com/thumbv2/123dokinfo/10523990.0/41.892.207.670.202.977/fig-5-2-control-response-flc-x-t.webp)
변수조합 퍼지 제어기 응답특성
두 경우 모두 노이즈의 영향이 나타나지만 제어가 안정적인 것을 확인할 수 있다. 본 논문에서는 도립진자 시스템의 안정화를 위해 상태변수를 물리적 의미에 따라 적절하게 결합하는 상태변수 결합 퍼지 제어기를 제안하였다. 가변조합 퍼지 제어기 설계에 필요한 비선형 운동방정식은 라그랑주 방정식을 이용하여 유도하였으며, 일반 퍼지 제어기도 비교 목적으로 설계하였다.
일반적인 퍼지 제어기의 경우 4개의 상태변수를 모두 사용하는 경우 퍼지규칙의 증가로 인한 계산부담으로 적용이 어려우므로 역진자계의 2개의 상태변수를 입력으로 사용하는 방법 다양한 퍼지 컨트롤러에 대한 변수가 사용되었습니다. . 제안된 퍼지 제어기를 설계하기 위해 먼저 역진자 시스템의 상태변수를 물리적 의미에 따라 보기 위치와 속도, 진자 각도와 각속도로 분류한 후 상태 피드백과 비교한다. 변환 계수를 사용하여 새로운 유형의 모드를 생성하는 컨트롤러입니다. 가변조합 퍼지 제어기로 구현되었습니다. 이를 통해 일반 퍼지 제어기에 필요한 두 개의 제어기를 하나로 대체할 수 있으며, 퍼지 규칙의 수를 줄여 사용할 수 있다는 장점이 있다.
상태변수 퍼지 제어기의 유효성과 견고성을 검증하기 위해 이를 불안정하고 비선형성이 큰 역진자 시스템에 적용하여 시뮬레이션을 수행하였다.
![Fig. 5.5 Control response of FCSC when x(0)=[0.1 0 0.2 0] T](https://thumb-ap.123doks.com/thumbv2/123dokinfo/10523990.0/45.892.209.675.210.970/fig-5-5-control-response-fcsc-x-t.webp)