해양 가스 터빈 엔진의 속도 제어를 위한 비선형 PI 컨트롤러 설계. 키워드: 가스 터빈 엔진; 비선형 PI 컨트롤러; RCGA(리얼 코딩 유전 알고리즘); 서지.

특히, 가스 터빈 엔진의 성능은 속도가 부스트 한계에 얼마나 근접할 수 있는지에 따라 결정됩니다. 그러나 국내에서는 최근 환경 규제로 인해 선박용 가스터빈 엔진에 대한 연구가 미미한 실정이다.
이러한 연구는 주로 발전용이나 항공용 가스터빈에 국한되어 있어 선박용 가스터빈 엔진 제어에 대한 연구는 아직 부족한 실정이다. 2장 가스 터빈 엔진의 속도 제어 시스템 모델링.
가스터빈 기관의 속도제어시스템
속도제어시스템 설계시 고려 사항
본 논문에서는 를 단순 이득 값으로 사용하여 속도 제어 시스템에 적용하였다. “결국 변화에 가장 잘 적응하는 종이 살아남는다”고 말한 찰스 로버트 다윈의 진화론 원리를 컴퓨터 알고리즘을 통해 모방하여 문제를 해결하는 데 사용되는 대표적인 최적화 기법이다[24, 25 ].
속도제어시스템 구성 및 작동원리
가스터빈 기관의 속도제어를 위한 선형 모델링
모델링 기법
또한, 열역학적 거동 특성을 고려한 수학적 모델은 주로 설계 조건에 맞게 생성되므로 가스터빈 엔진의 저부하에서는 신뢰성이 떨어집니다. 이후 개발된 하이브리드 모델은 이 아날로그 가스터빈 엔진 모델을 더욱 정확하고 정교하게 개선했다.
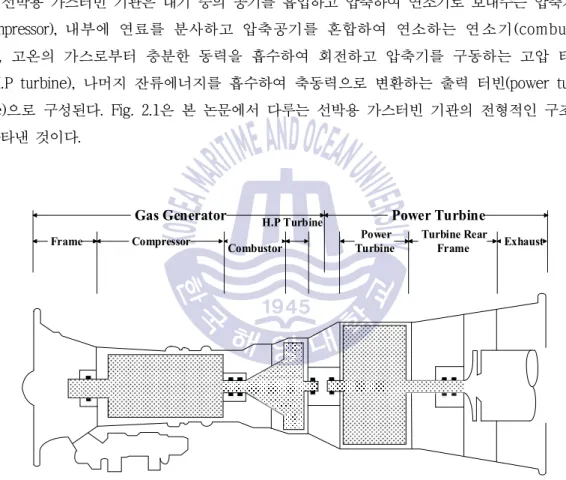
가스발생기
라플라스 변환식(2.6)에 의해 시간지연을 고려한 가스발생기의 최종 동역학적 모델은 다음과 같다. 가스터빈 엔진의 시간지연이란 연소기에서 연료가 연소되고 연소가스가 고압터빈에 도달하는 데 걸리는 시간을 의미하며, 선행연구[14]의 설정을 그대로 적용하였다.
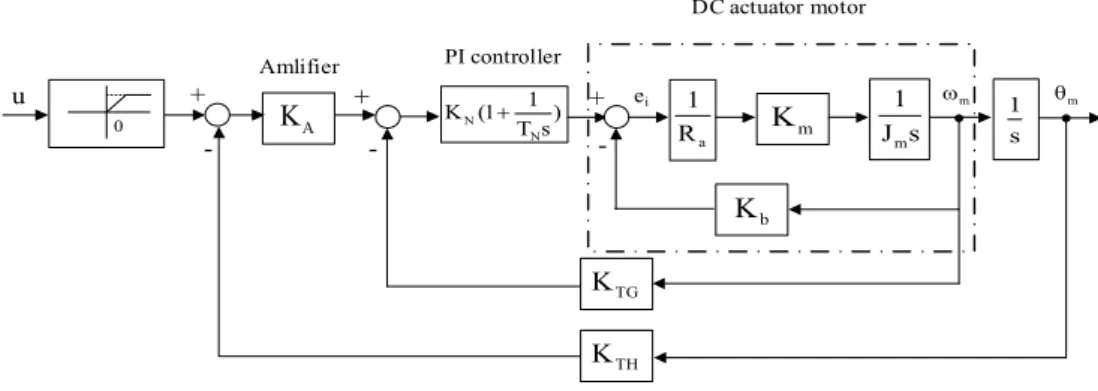
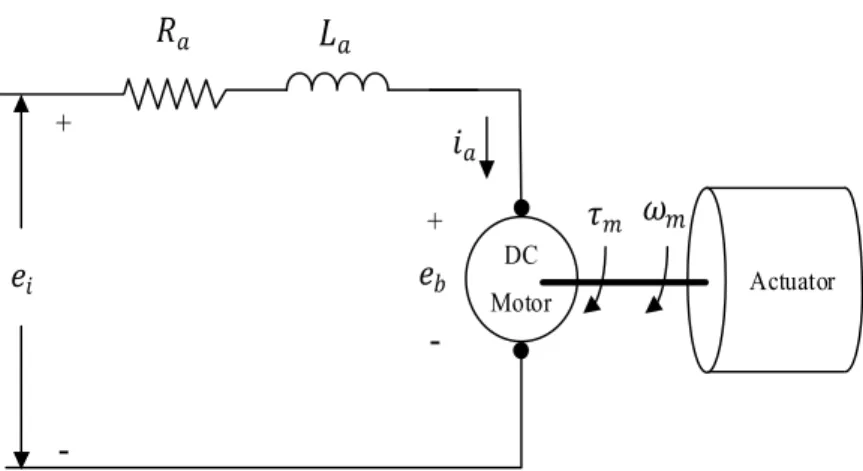
PLA 액추에이터
전기자의 전압을 조절함으로써 모터의 출력인 각속도를 원하는 값으로 조절할 수 있으며 Kirochhoff의 법칙을 이용하여 다음과 같이 표현할 수 있다[21]. DC 모터의 단자에 전압을 가할 때 전기자 전류 에 비례하여 모터 토크가 발생하므로 다음과 같이 표현할 수 있습니다.
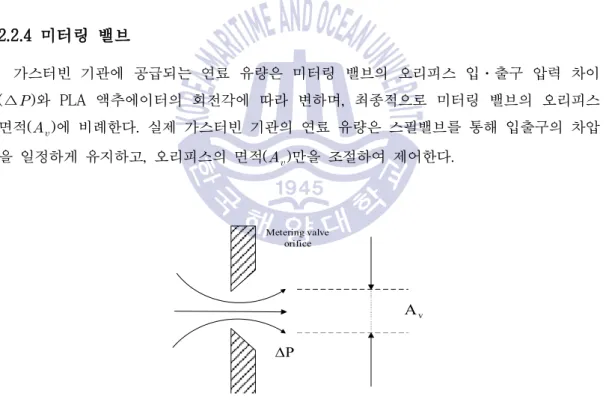
미터링 밸브
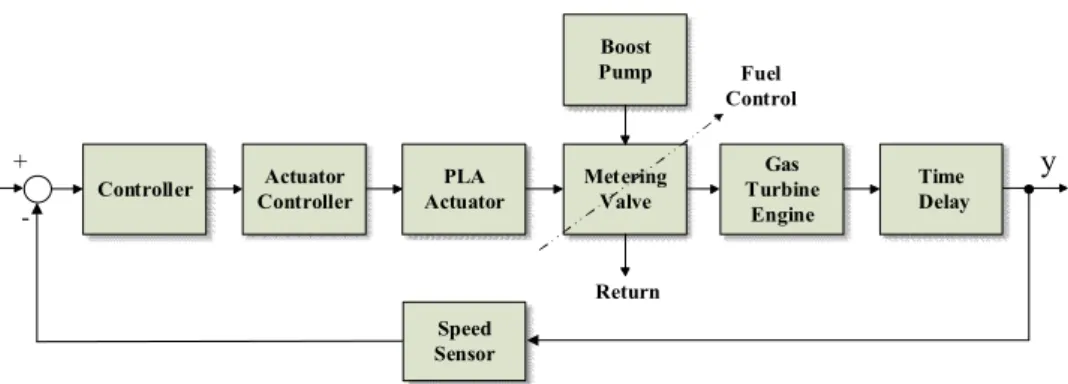
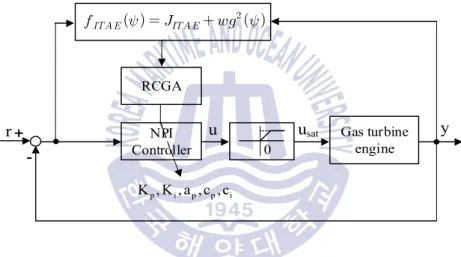
또한, 선박용 가스터빈 엔진의 외란은 일반적으로 경로에 따른 선체 및 프로펠러의 외력과 부하 변동에 따른 고압 터빈 출구 압력의 변동에 의해 발생한다. 지금까지의 공정을 통해 가스 발생기와 PLA 액츄에이터를 포함하는 시스템의 블록도를 그림 1에 나타내었다.
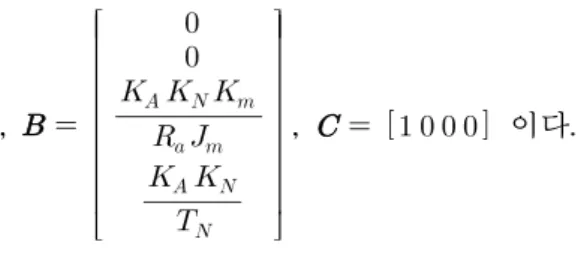
속도제어시스템의 상태공간 표현
3장 매개변수 최적화를 위한 유전 알고리즘. 본 장에서는 제안된 가스터빈 엔진의 속도 제어기 이득값을 최적으로 조정하기 위해 사용되는 도구인 RCGA(Real-Coded Genetic Algorithms)[24]와 설계 사양 제약 조건에 대해 설명한다.
유전알고리즘
유전알고리즘의 기본구조
유전 알고리즘은 본질적으로 진화 현상을 인위적으로 유도하고 이를 염색체나 자연 매개변수로 전환함으로써 문제에 대한 해결책이 될 가능성이 있는 초기 개인 집단을 생성합니다. 위와 같이 유전자 알고리즘은 크게 모집단 초기화, 적합성 평가, 재생산, 교배, 돌연변이의 5단계로 나누어진다.
실수코딩 유전알고리즘
초기집단의 생성
특히, 초기 집합 P(0)은 무작위로 생성된 무작위 초기화 방법이나 경험에 기초한 안내된 초기화 방법을 통해 생성될 수 있다. 본 논문에서는 무작위 방법을 이용하여 초기 집합을 초기화하고, 거친 초기 환경에서 전역해를 찾는 방법을 사용한다.
기본 유전 연산자
재생산
번식은 적자생존이나 자연선택을 모방한 인위적인 메커니즘으로, 개인의 적합도에 따라 집단 내에서 개체를 선택하고 새로운 집단을 형성하는 과정이다. 이를 통해 집단 내의 약한 개체는 제거되고, 강한 개체가 선택되면서 세대교체가 진행됨에 따라 우성 유전자를 지닌 강한 개체가 탄생하게 된다.
교배
일반적으로 룰렛휠 재생산 방식을 사용하나 선발과정의 특성상 초기에 개체군의 유전적 다양성이 상실될 수 있다. 따라서 본 논문에서 Pham과 Jin[28]은 이러한 단점을 개선하고 실시간 응용에 적합한 작은 염색체 집단을 사용했습니다. 우리는 제안된 대로 그라데이션과 같은 재현을 사용합니다.
돌연변이
적합도 평가
유전자 알고리즘의 성능에 직접적인 영향을 주기 때문에 적절하게 선택된다. 그리고 일반적으로 탐색공간 내에서 목적함수의 최소값을 알기가 쉽지 않기 때문에 경험적으로 는 매우 작은 값으로 선택된다.
적합도의 스케일링
그러나 처음에 를 잘 선택했더라도 진화하는 동안 값이 고정되면 선택 압력이 감소하므로 적합도 함수의 스케일링이 필요합니다.
엘리트 전략
엘리트주의 전략은 한 세대의 최적 개인이 멸종되는 것을 막는 방법이다. 이전 세대의 최적 개체를 저장하면서 모의 진화를 수행한 후, 최적 개체가 사라진 것이 확인되면 현 세대의 가장 약한 개체 또는 무작위로 선택된 개체를 저장된 최적 개체와 교환함으로써 가장 강한 개체를 보장한다. 인구는 다음 세대에 전달됩니다. 일반적으로 이는 유전자 알고리즘의 성능을 향상시키기 위한 전략이다[31].
종료조건
단, 계산 과정에서 파기될 수 있습니다.
제약조건
이러한 제약을 고려하면, 가스터빈 엔진의 속도 제어를 위한 제어기 설계는 복잡하고 제약이 있는 최적화 문제가 되며, 이를 해결하기 위해 유전 알고리즘이 사용된다. 여기서 는 각 구속상태에 대응하여 설계자가 선택한 벌점상수이다.
비선형 PI 제어기의 이득 특성
비선형 비례 이득
제어의 응답속도를 가속시켜 오차가 큰 경우에는 비례이득을 크게 하고, 응답이 거의 정상상태에 도달하여 오차가 작은 경우에는 큰 비례이득값을 계속해서 유지하여 오차의 효과를 증폭시키며, 오버슈팅 및 진동이 발생하여 불안정해지기 때문에 예방이 필요합니다.
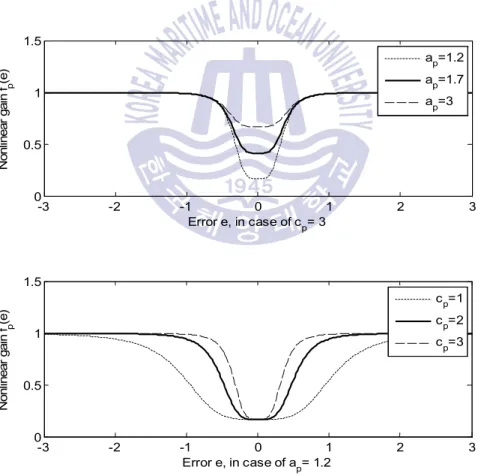
비선형 적분 이득
속도 제어용 비선형 PI 제어기 설계시 고려 사항
제약조건을 고려하지 않은 비선형 PI 제어기의 최적 동조
RCGA의 매개변수는 개체군 크기 Psize=50, 교배 확률 Pc입니다.
제약조건을 고려한 비선형 PI 제어기의 최적 동조
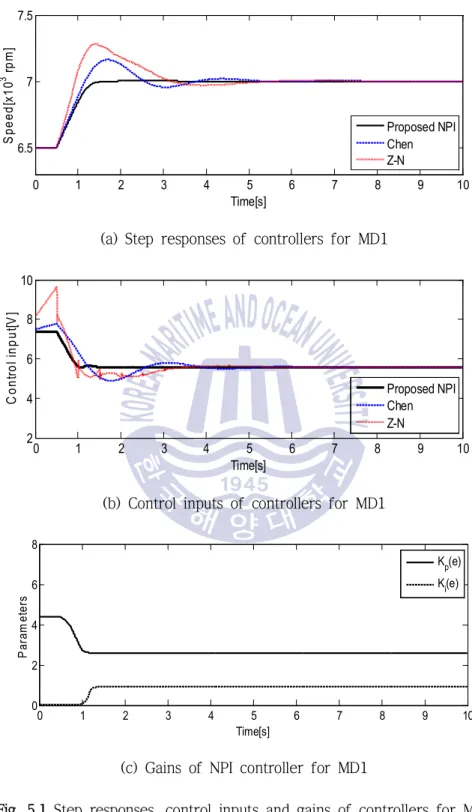
비교를 위해 제안된 NPI 제어기, Chen의 적응형 제어기 및 Z-N 튜닝 방법을 세 가지 모델에 적용하여 시뮬레이션하였다. 둘째, 제약조건을 고려한 경우 제안한 NPI 제어기가 주어진 제약조건을 만족하면서 목표값을 잘 추종하는지 시뮬레이션을 통해 유효성을 검증한다.
제약조건을 고려하지 않은 경우
적용모델 중 제안된 NPI 제어기의 IAE 값이 가장 작다. 제안된 비선형 PI 제어기는 오버슈트 및 안정화 시간 측면에서 다른 제어기에 비해 월등히 우수한 것을 확인하였다.


![Table 2.2는 동작점의 변화에 따라 이득 , 시정수 , 시간지연 을 나타낸 것이 다. 가스터빈 기관에서의 시간지연은 연료가 연소기에서 연소하여 고압 터빈까지 연소 가스가 도달하는 시간을 의미하고, 기존 연구[14]의 설정을 그대로 적용하였다.](https://thumb-ap.123doks.com/thumbv2/123dokinfo/10605966.0/24.773.105.677.354.671/동작점의-시간지연-가스터빈-기관에서의-시간지연은-연소기에서-연소하여-적용하였다.webp)