In this thesis, we develop a new routing scheme that takes into account the vehicle density, and delivers packets in a reliable and timely manner. We pay attention to the encounter event between two vehicles and the probability of successful transfer at the encounter location to guide the forwarding decision. The proposed routing scheme uses traffic statistics to predict vehicle encounters, and to optimize the routing decision by considering the quality of wireless communication.
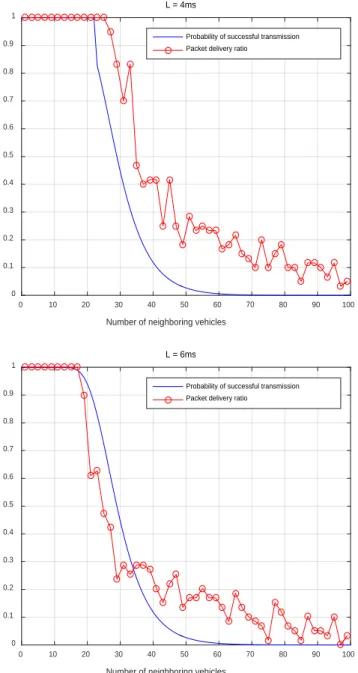
The probability of a successful comparison of the transmission and delivery ratio for different deacon transmission times (L = 2 ms, 4 ms, 6 ms). The impact of the probability of successful transmission on the package delivery ratio and package delivery delay.
INTRODUCTION
In VANETs, certain applications (e.g., security applications) require geographic addressing so that the information can be distributed within a geographic area. As one of the main research topics in VANET, many routing protocols for VANET have been developed and evaluated based on MANET routing protocols. In general, mobile ad hoc routing protocols require reliable packet delivery and low delivery delay, with minimal communication overhead and network resources.
MANET routing protocols can be broadly classified into two categories: proactive routing and reactive on-demand routing [12]. Many previous routing protocols for MANETs have been shown to perform poorly in VANETs [13], [14]. One of the main problems is that the previous routing protocols do not achieve stable routing information.
RELATED WORK
GPSR works greedily and only needs the knowledge of the immediate neighbors of the forwarding node. In particular, GPSR outperforms DSR in many aspects [16] in terms of packet delivery ratio and protocol cost. There are also some disadvantages: the overhead of getting the target position is not taken into account and can cause a loop of travel in a planar graph with transverse edges.
In GPCR, since actual routing decisions are made only at an intersection, it stops forwarding a packet at the end of the road segment (ie, at the intersection). If the coefficient is 0, it means that there is no correlation between the position of the neighbors and the node is at the intersection. The results show that GPCR outperforms GPSR in terms of packet delivery ratio when the routes have a larger number of hops.
A vehicle that has a packet to send starts a route discovery process called Reactive Location Service (RLS) and can obtain the destination's position. After obtaining the location information, the packets are forwarded to the intermediate vehicle closest to the destination, which is called position-based greedy routing. If it receives a request from a relay node (at an intersection) that can make a better decision with global information, it forwards the packet to the relay node.
Each relay node continues to estimate the delivery delay between other relay nodes against the dynamic traffic environment. Although they perform well in dense vehicular networks because individual vehicle behavior is relatively insensitive to forwarding capacity, they often suffer from poor performance in sparse networks. The TSF speculates the location that the target vehicle will pass by and forwards the packet to the location.
The location is chosen so that the parcel delivery delay is minimized and the parcel delivery probability is high enough.
SYSTEM MODEL AND MOTIVATION
The relay node holds the packet for a while and sends a carry request to another vehicle which can improve the delivery performance. Public Vehicle can communicate with nearby private vehicles, and in addition, it connects directly to the Internet by means of Wide Area Network (WAN). For private vehicles, it can play the role of a backhaul node to the Internet and serve the packets from the private vehicles.
When a private vehicle has an Internet service packet, it tries to reach one of the available public vehicles, either by directly carrying the packet to the public vehicle or by transmitting the packet for transmission to another private vehicle that will encounter the vehicle. public. . Due to the timer granularity of a time slot, there is a possibility that many vehicles will transmit simultaneously if their timers expire in the same time slot. If the packet transmission fails due to a collision, the vehicle retransmits the packet to improve reliability.
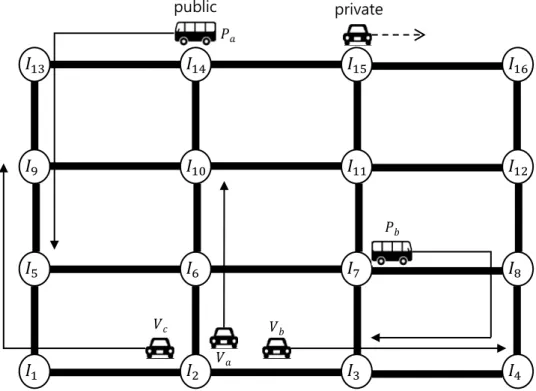
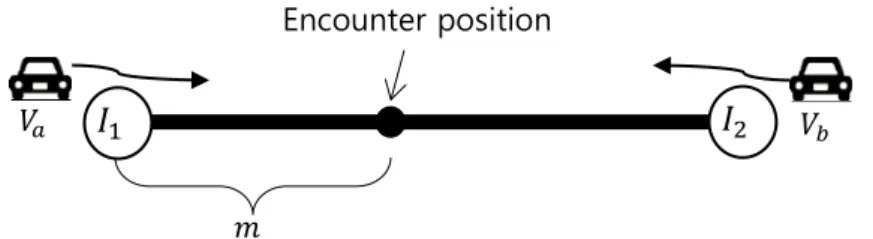
We consider the forwarding problem in urban areas, where the event of packet loss is not rare. We consider a vehicular network with a map (i.e., roads and intersections), the set 𝑉𝑉 of private vehicles, and the set 𝑃𝑃 of public vehicles, where public vehicles (e.g., buses) are connected to the Internet via WAN. Further, even if it encounters a public vehicle, it may fail to transmit the packet if it encounters a crowded area.
To deliver the package in a reliable and timely manner, the source 𝑉𝑉𝑎𝑎 has the option to send the package to another private vehicle 𝑉𝑉𝑏𝑏∈ 𝑉𝑉 and use it as a relay vehicle to deliver the package to a public vehicle. We note that anycast is considered and the package can be delivered to any public vehicle. If road segment 𝐿𝐿5,9 is crowded (while road segment 𝐿𝐿4,8 is relatively quiet), 𝑉𝑉𝑎𝑎 sends the packet to 𝑉𝑉𝑏𝑏, which can reliably deliver the packet to public vehicle.𝑏𝑏
Once the probability is calculated, the vehicle with the package can easily decide if it is.
ESTIMATION ON THE PROBABILITIES OF VEHICLE ENCOUNTER AND SUCCESSFUL
From the independence of the travel times over the road segments, 𝐸𝐸[𝐷𝐷] and 𝑉𝑉𝑎𝑎𝑉𝑉[𝐷𝐷] can be obtained by summing the means and variances of each link's travel time along the path as In addition to the collision probability (11) and the expected meeting time (13), we need to calculate the probability of successful packet transmission, which will be directly used to make the routing decision. If several vehicles try to send a beacon message in the same time period, their signals will collide and none of the transmissions will succeed.
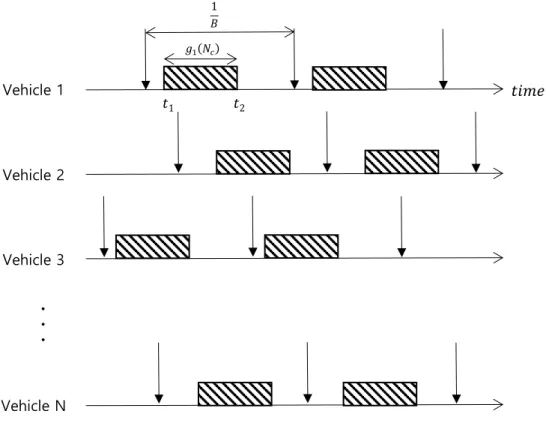
We'll start with a brief overview of how the IEEE802.11p CSMA/CA medium access control protocol works. Therefore, to calculate the probability of successful transmission, estimating the number of competing vehicles is crucial, as it directly affects the probability of simultaneous beacon transmissions. We note that estimating the expected number 𝑁𝑁𝑐𝑐 of competing vehicles is difficult, because the time a beacon is waiting is also a function of 𝑁𝑁𝑐𝑐, and is not proportional to the number of neighboring vehicles, as we will see in the following .
Note that the start of active times of neighboring vehicles will be uniformly distributed over beacon period 1. 𝐵𝐵, and the average number of vehicles whose active time partially overlaps with the vehicle of interest is 𝑁𝑁𝑐𝑐. Let 𝑒𝑒1 and 𝑒𝑒2 denote the start and end of the active time of the vehicle we are interested in (vehicle 1).
Therefore, the ratio between the active time and the period of the beacon must be equal to the ratio between the expected number of conflicting vehicles and the expected number of vehicles on the road in the transmission area, i.e. Based on the expected number of competing vehicles, we can get the probability of successful transmission of the beacon at one time. Let 𝑇𝑇 denote the time during which two vehicles are in transmission range (i.e. the duration of the encounter), then we can obtain the probability 𝑃𝑃𝑠𝑠𝑇𝑇 that a packet can be successfully delivered during the encounter.
When there are a number of competing vehicles within a transmission range, a beacon transmission attempt is likely to fail due to collision with other vehicles.
PERFORMANCE EVALUATION
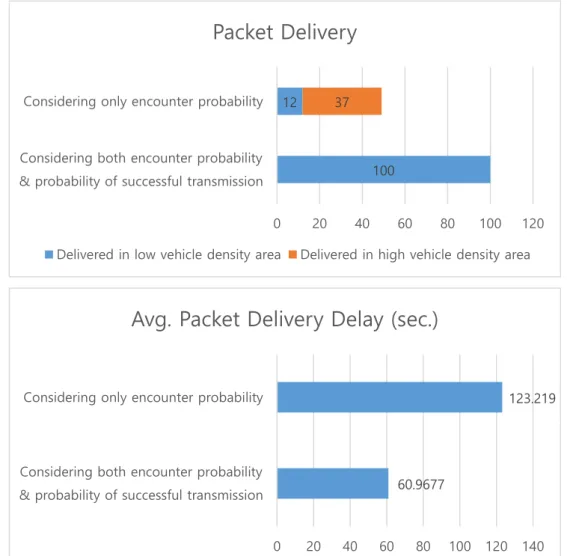
4 shows the probability of successful transmission as a function of the number of neighboring vehicles and compares the packet delivery ratio at different beacon lengths. We are now testing whether PDPD can provide reliable and timely data transmission when considering the probability of successful transmission at the transmission decision. To do this, we simulate with two different transmission schemes: one uses only the encounter probability in the transmission decision, and the other uses both the encounter probability and the probability of successful transmission in the transmission decision.
We place 300 private vehicles at the top of the road network and 50 private vehicles at the bottom of the road network. Each private vehicle randomly selects one of the intersections in each area as its starting position, and randomly selects another intersection as its destination position and moves along the road. Two public vehicles pass through a road segment at the top of the road network and two other public vehicles pass through a road segment at the end of the road network.
5 shows the impact of the probability of successful transmission on the package delivery ratio and the package delivery delay. If we take the probability of successful transmission into account in the forwarding decision, a packet will be delivered to an area with low vehicle density instead of an area with high vehicle density, thereby improving the packet delivery ratio. We also find that the average package delivery delay is lower than if only the .
Each vehicle has a random starting point at one of the intersections, and randomizes its end point from another intersection. Each public vehicle moves around the perimeter of the center of the road network, which is fixed. During the simulation, 100 packets are dynamically generated from a specific private vehicle in the road network, which circulates around the entire road network.
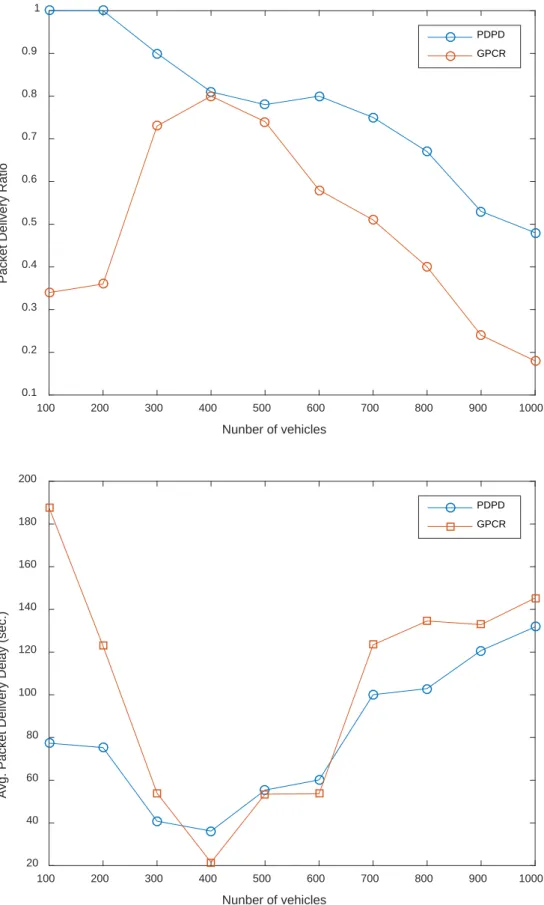
This is because (1) the trajectory information provides more accurate knowledge for the forwarding decision and (2) with the probability of successful transmission, PDPD can avoid sending a packet to a public vehicle passing through a dense area high where the transmission is likely to fail due to collision with other vehicles.
CONCLUSION
34;Unicast Routing Protocols for Vehicular Ad Hoc Networks: A Critical Comparison and Classification." Pervasive and Mobile Computing. 34;Evaluation of Routing Protocols for Vehicular Ad Hoc Networks in Typical Road Traffic Scenarios." Proc of the 11th EUNICE Open European Summer School on Network Applications. 34; GPSR: Greedy perimeter stateless routing for wireless networks." Proceedings of the 6th Annual International Conference on Mobile Computing and Networking.