It explains why safety is one of the imperatives of the maritime industry and what greatly influences the success and efficient existence of this industry. Therefore, reducing the associated risks and improving maritime safety are essential requirements for the most important marine transport industry. This is because ship structure and system reliability are a relatively small part of the safety equation.
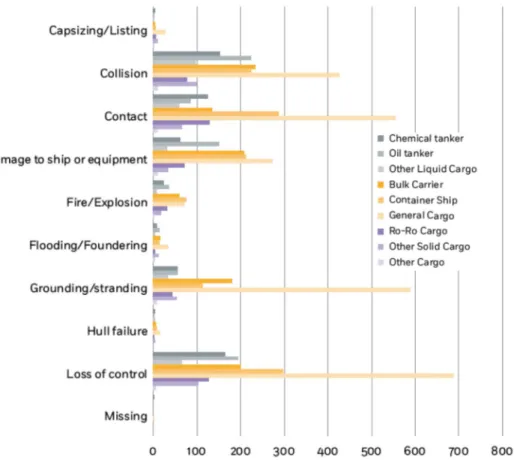
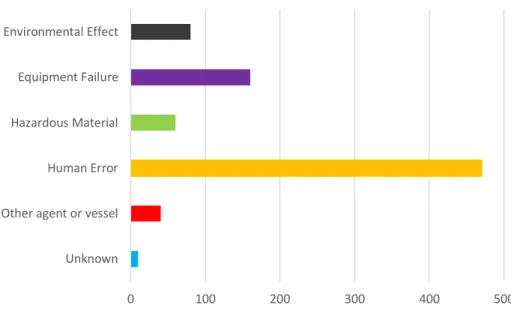
This is by analyzing 98 ship accidents that occurred between 2014 and 2017 in order to investigate the main parameters that contribute to these accidents, identify causes related to human error, and assess the overall contribution of human error causes to the occurrence of these accidents. The results of the analysis showed that 75% of the causes of registered accidents are human error. To provide details on the contribution of human error to the common causes of shipping accidents, an analysis of reported accidents by the European Maritime Accident Information Platform in 2011-2017 was carried out for cargo ships, fishing vessels, passenger ships and service ships.
The analysis of the collision case study, carried out using a step-by-step event evaluation technique and a systematic accident investigation process, based on a comprehensive and multi-linear description of the sequence of events, using the STEP methodology to identify the causes of investigate the collision and the contribution of human error to causes.
Introduction
The aim of this research is to explore detailed analysis and information on the impact of human error on the overall safety of maritime transport. Evaluation of the overall contribution of human error to the maritime accidents selected as a case study for investigation. Step-by-step detailed analysis methodology for marine accident case studies to present the effect of human error as a root cause of marine accidents.
KOTC” to show the overall contribution of human error as a major cause of marine accidents. The main areas of review are on studies conducted to investigate human error's contribution to overall maritime safety. This is to identify the various causes that led to ship accidents, identify causes of human error and examine the overall contribution of human error to the case study ship accidents.
Chapter 4 presents a step-by-step detailed analysis methodology for ship accident case study to identify the main causes of accident and the contribution of human error to them and proposes a systematic process for accident investigation based on a comprehensive and multi-linear description of event sequences.
Literature Review
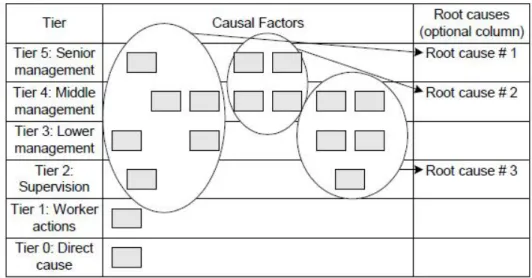
The case of the collision between the passenger ship (Noordam) and the loaded bulk carrier (Mount Ymitos) could be considered a typical example of documenting the involvement of human elements in shipping accidents [14]. The analysis showed that human error is the main factor in fishing boat accidents [19]. Evaluate each of the statements about causal factors if they are the root cause of the accident.
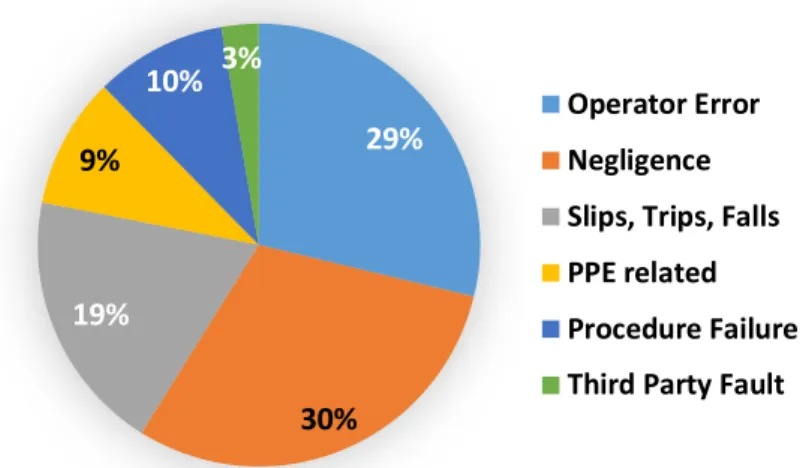
The analysis of the causes of ship accidents given in Figure (3-3) shows that accidents due to human error are the cause of the majority of accidents related to KOTC's ship accidents (~75%). Figure (3-4) shows the analysis of the accidents due to human error per type of error. As can be seen from the analysis of KOTC 30 ship accidents during the period, human errors contribute the vast majority of the recorded accidents.
As shown in Figure (3-4), accidents due to negligence account for 30% of all human error cause categories. As shown in Figure (3-4), accidents due to negligence account for 29% of all human error cause categories. Accident survey analysis shows that 19% of all human error accidents were caused by a slip, trip or fall.
Detailed Analysis Methodology of KOTC Ship Accident Case
The detailed data sheet for the oil tanker is given in Table (4-1) and Kiafan's photo is illustrated in Figure (4-2) [36]. In the following section, a detailed illustration of the pre-collision events is given in time and action taken by each vessel's crew. July 23 at: successfully completed the first unloading of the shipment to small harbor tanker.
July 24 am): Successfully completed the second unloading operation of the shipment to a small harbor tanker. Kiafan's captain felt that it is not a dangerous situation because Unison Star has full control of the ship's engine and is aware of the area and regulations, so there is no risk to Kiafan. Therefore, the action was taken only to observe the path of the Unison Star on the radar.
The collision occurred to the left rear of the Unison and to the middle of the front of the Kiafan. In the following section, a detailed illustration of the post-collision events is given in time and the action taken by each vessel's crew. Comprehensive and multi-linear description of the accident process The following section provides a detailed comprehensive description of the pre-collision events, in time, and the actions taken by each vessel's crew.
The STEP diagram provides a systematic way to organize events into a comprehensive, multi-linear description of the accident process. In the following figure, a comprehensive description of the events after the collision is given in time and the action taken by the individual crew of the vessel. Kiafan's captain limited the risk of the situation where the Unison Star entered the anchorage area at high speed to normal or low risk.
According to the illustrated accident events and investigation report, the main cause of the accident was the complete loss of control on the Unison Star to avoid collision with a Blue Lotus vessel, which caused the Unison Star to drift towards the Kiafan oil tanker. Furthermore, the dispersal and lack of control of the Chittagong Port Authority contributed as a major factor to this accident.

Ships Collision Avoidance Algorithm
Due to the characteristics of a ship, a ship has a limitation to change the maximum course, as shown in Figure (5-3). The greater the detection range, the greater the number of neighboring ships. During the search, a ship tentatively selects one course as the next planned course, which incurs a cost calculated by equation 5.2.
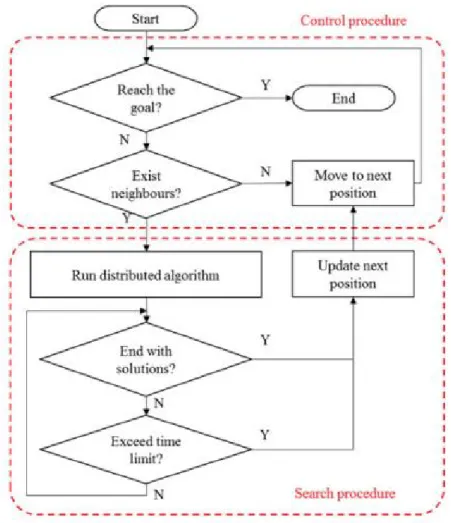
Local search applies to many problems, e.g., the traveling salesman problem or the nurse scheduling problem. In this section, I introduce the Distributed Stochastic Search Algorithm (DSSA), where each ship changes its next goal. A ship can choose the next new target course with probability p, otherwise it will keep the currently chosen next target course with probability 1-p[50].
After exchanging next target courses with neighboring ships, an agent calculates the cost to itself and the improvement itself. If some ship is not satisfied with the future course, it changes its course by following rules A or B, which are described below. This process is repeated until all ships are satisfied with their current target future courses.
In DSSA with rule A (denoted DSSA-A), only the ships with a positive improvement can stochastically change the next target course themselves. On the other hand, in DSSA with rule B (denoted DSSA-B), the ships without improvement themselves can also change the next target course if they have positive costs. This is because the change in a ship's next intended course can yield better results on the next step, even if it does not reduce costs at the moment.
Figure (5-20) shows the average distance and number of messages for 12-ship collisions. In terms of the number of messages, DSSA had much fewer than DLSA and DTSA. If ship A has the greatest improvement, the next intended course changes as shown in Figure (5-21)-(3).
Thus, the collision between ships B and C still exists, they exchange messages with neighbors as shown in figure.
Conclusions and Recommendations
Finally, he gave an overview of the main accident investigation methods used in the maritime industry. The study found that human error factors accounted for approximately 75% of the causes that led to KOTC ship accidents. Anchor chains should not be overstretched to prevent the vessel from swinging in a bow that is greater than normal, increasing the risk of collision.
Where, the more the number of graduate courses increases, the shorter the average distance and the smaller the size of the degree of the graduate course, the greater the number of errors. Shipping companies should seriously consider the experience of the captain and crew when working in high-risk areas. Watabe, “ship autonavigation fuzzy expert system (safes).,” Journal of Society of Naval Architects of Japan, vol.
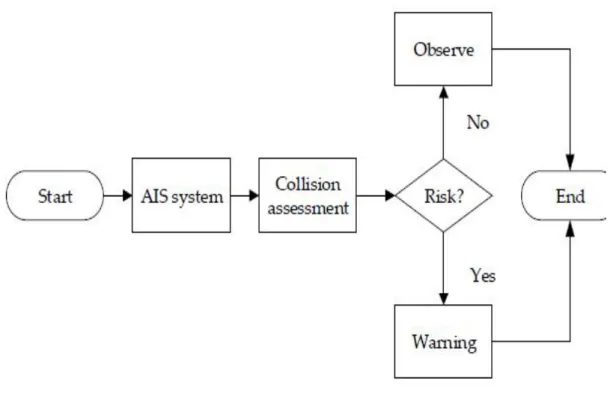
It is of great importance to prevent collisions through timely detection and immediate warning of the risk of collision, thus ensuring maritime safety and avoiding casualties. In the collision avoidance algorithm, it is important to determine the ship's motion parameters compared with the target ship, which is the basis for the calculation type and case assessment [52]. Where ( , ) are the geographic coordinates of the ship with speed and direction of ∅.
R and DCPA represent the collision space, TCPA represents the collision time, and K represents the difficulty of avoiding the collision. Where = last action distance (DLA) indicates the collision distance of the vessels and the last action to avoid the collision. Where , , , and are membership functions representing the distance at the closest point of approach, the time to the closest point of approach, and the distance and azimuth of the ship and the target ship, respectively.
If the collision probability of the ship and the target ship is high, the system will issue a warning and ask the crew to consider the situation, then the crew must take action to avoid. In the collision avoidance algorithm, it is important to determine the motion parameters of the ship compared to the target vessel, which is the basis of the calculation type and case judgment as discussed above in equation (A.1-3).