To overcome these challenges, rapid configuration or reconfiguration of production systems is crucial. Therefore, the main goal of this article is to quickly design, test and verify the control software, both in a virtual and a real environment. To do this, we propose a rapid control prototyping procedure consisting of the construction of a virtual factory, the development of control software and a final calibration procedure.
Rapid control prototyping facilitates engineers to quickly develop control software, including communication inputs and outputs, before an actual shop floor is built. The proposed simultaneous procedure of manufacturing system design and its control software development will significantly reduce the reconfiguration time of a manufacturing system.
Introduction
- Background
- Motivation
- Objective
- Outline of the thesis
On the other hand, the control software in the proposed process will consist of task sequences and trajectories, including position and motion information. It can be used by control software engineers to design, test and verify control software more quickly. Interaction between virtual workstations and control software makes it possible to design, test and verify control software simultaneously.
Literature Survey
- Reconfigurable manufacturing system
- Architecture design
- Configuration design
- Control design
- Virtual manufacturing
- Design-centered VM
- Production-centered VM
- Control-centered VM
- Rapid control prototyping in industry applications
- Factory planning
- Summary of literature
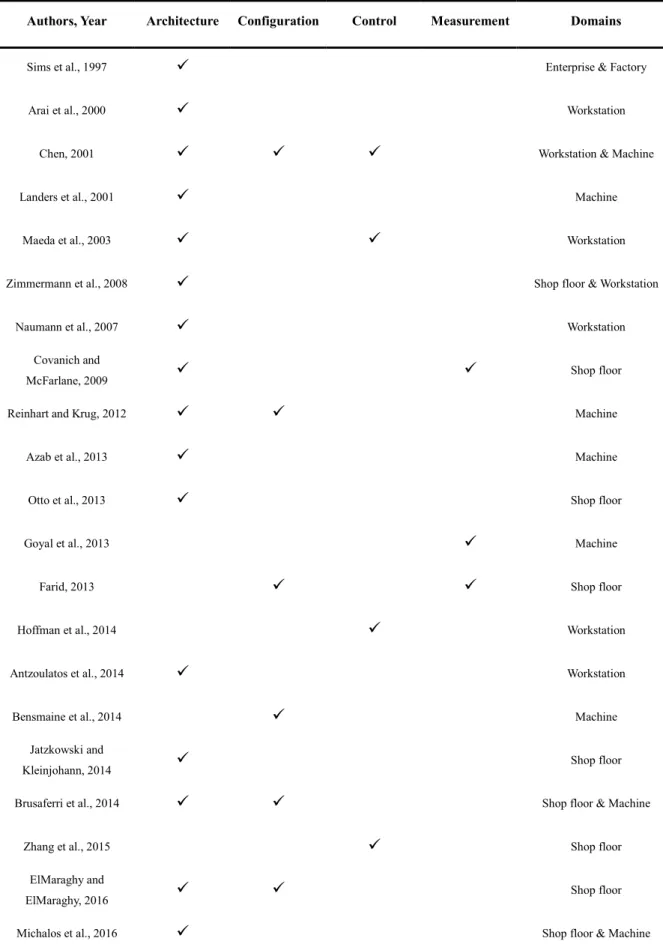
Reconfigurable assembly systems are presented with a flexible robot assembly system with decentralized architecture (Maeda et al., 2003). In the case of the shop floor level, some different levels are introduced for communication and reconfiguration (Jatzkowski & Kleinjohann, 2014; Michalos et al., 2016; Zimmermann et al., 2008). In machine level architecture, an adaptable system structure called RMTs is proposed for the changeable machine and control within the change of parts, features and cycle times (Landers et al., 2001).
While P&P control architectures are also considered with three layers: application, configuration, communication (Naumann et al., 2007). Reconfigurable software has also been proposed to activate machine-level and system-level reconfiguration (Azab et al., 2013). The concept of control paradigms such as agent-based technologies is introduced (Hoffman et al., 2014; Shen & Norrie, 1999).
A new coordinate method is proposed as a discrete event control subsystem for reconfiguration and its verification (Zhang et al., 2015). This is useful if we can create, test and evaluate virtual prototypes in the production of customized products (Krovi et al., 1999). By adopting a digital manufacturing system based on modeling and simulation, an optimized production line can be developed (Choi et al., 2014).
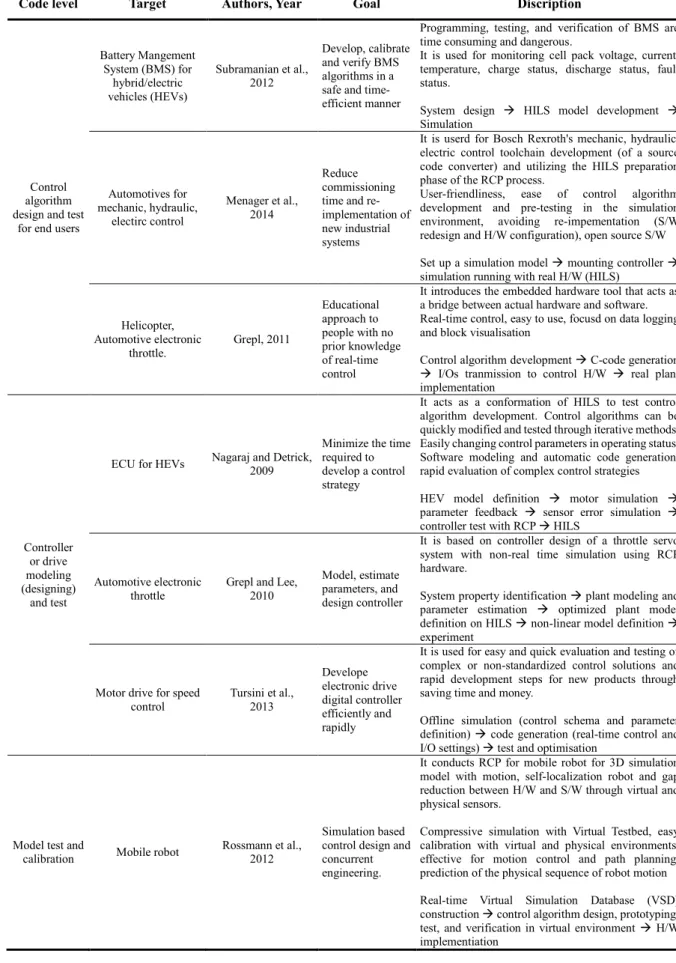
The designer can focus on control design rather than programming details or debugging control languages (Rubaai et al., 2008). In the manufacturing industry, the robot control system is implemented by RCP (Chen et al., 2004; Lapusan et al., 2008). It is sometimes used to prescreen dangerous targets such as batteries (Subramanian et al., 2012).
Rapid Control Prototyping for Factory Installation
The rapid factory installation procedure
- Layout design
- Controller configuration
- Factory-in-the-loop simulation
- Factory OS installation
- Test and calibration
As the same concept, control and communication protocols following industrial standards will be displayed to communicate different field devices. OPC UA that integrates the smallest devices into the Internet of Things is intended to enable application programmers to view network services vertically and consistently (Imtiaz & Jasperneite, 2013). In addition, it is necessary to develop inter- and intra-communication architectures to facilitate and secure data collection.
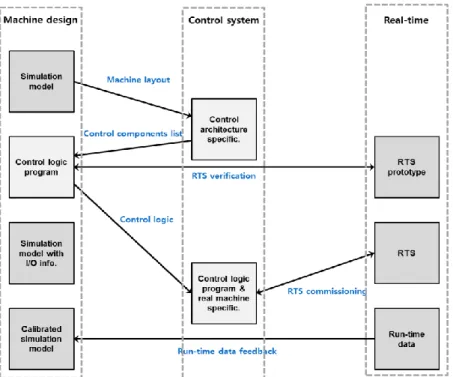
Factory-in-the-loop simulation is used to verify the stability, operation and fault tolerance. To save development time from factory installation, most tests can be completed before a factory prototype. In addition, the developed complex control software will be validated and verified to improve the quality of testing through iterative simulation in a hardware environment.
To verify and validate the control software developed in the virtual environment, they will be embedded in the controllers. As the input variables associated with actuators are adjusted, the calibration is completed in the real environment. The procedure follows the V-model of system development, from the user interface to control software design to parameter calibration.
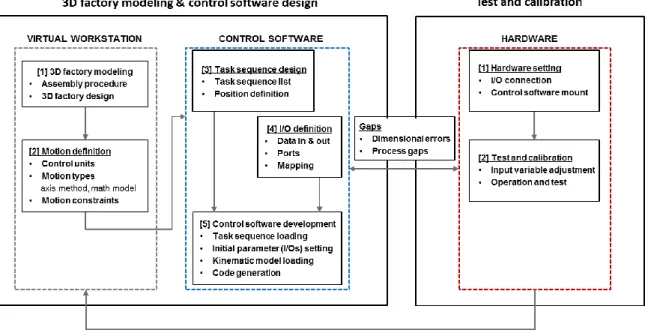
This document is specifically aimed at 3D plant modeling and software control (RCP) design in step 3 and testing and calibration in step 6 of the rapid factory installation process.
RCP for factory installation
- Definition of RCP
- Advantages of RCP
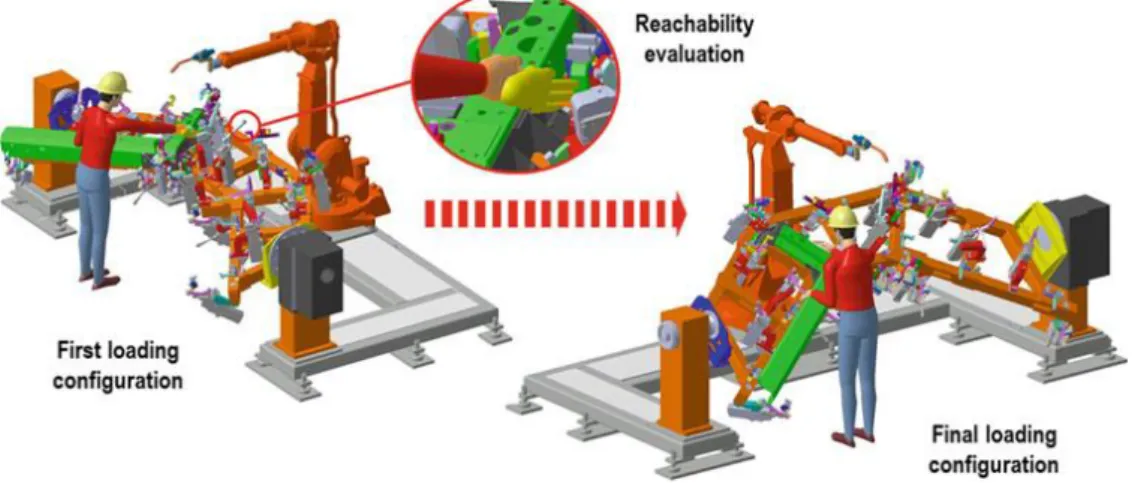
The problem of various types of malfunctions, interferences and collisions between hardware and software can be tested and found in advance in a virtual environment, so that the control process can be performed more stably when the control software is applied to the actual hardware. To verify the fast and effective control software design and testing, we compared the software development time with RCP and the traditional way without RCP in different cases. This virtual workstation construction allows control engineers to predict how control software will perform and correct design errors in advance in real time without damaging real hardware devices.
The control software design will start working immediately after creating a virtual workstation with RCP, while the other needs real hardware. After the design of the control software, hardware test and calibration can be done in parallel with the hardware development using the completed simulation models. However, the control software, including the task sequence and input variables, will be completely modified in response to the changed tasks.
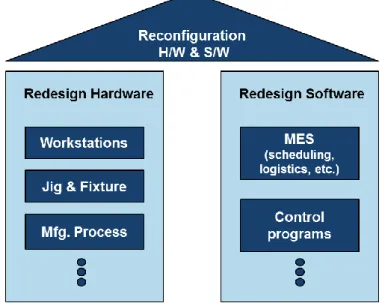
The step of control software development is still time-consuming in the process without RCP. This is because control software must be newly developed and verified when the workstation is redesigned. However, it takes a few days to redesign control software because we can simply add the new actuators and change the positions.
After redesigning the control software, we can start verifying the new control software by simulation.
The RCP procedure for reconfigurable assembly workstations
- Test and calibration
In the third step, there are some different time distributions with RCP and without RCP. From the gap, the total software development time will be more reduced in the redesign process than in the new design process. When it comes to the vertical assembly workstation, the 2.5-axis gantry robot has linear motion.
They can be selected according to the controller and control method, in the case of this workstation we used absolute displacement. The sequence of tasks refers to the assembly processes in the design phase of the workstation in Figure 3.13. In this process, the trajectory must be considered and checked to avoid collision between machines in the virtual workstation.
In the case of output, data can be used to collect sensor data for machine diagnostics and product quality checks. The control software refers to an important part of a software program that controls the workstations in the factories. With this software we can test and verify the process simultaneously in the virtual environment.
In the first iteration, the object hit the test bench frame due to the high acceleration of the crane. In the event of a process error, it is necessary to repeatedly reduce the actual changes in the input variables. Once the control software is designed or redesigned in the software, newly developed control software is fitted into controllers.
Discussion
Development time for the overhead crane testbed
Once the drawing was complete, we ordered the workpiece to match the workpiece drawing and procured the necessary hardware such as linear actuators and corresponding drivers. At this time there was a delay in the bracket assembly work due to machining, delivery and assembly in actual bracket construction. The program consists of simple position controls and systems to determine the weight of an object hanging the crane.
In testing and calibration, the control software was modified to eliminate dimensional errors and process gaps as mentioned in the example in section 3.3.2. In the case of the RCP process, 3D models can be easily downloaded through the purchase of commercial linear actuators. Because of the relatively simple task, the control program was completed a week before the actual hardware arrived.
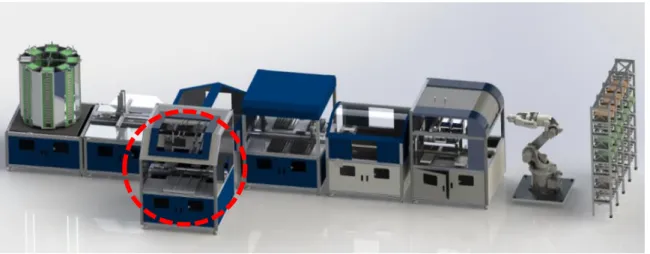
Development time for the vertical assembly workstation
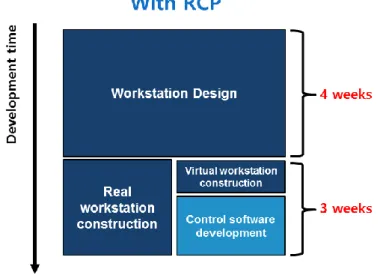
The workstation design took a long time due to the many tasks and corresponding five different control units. After the workstation design is complete, it takes two weeks to assemble the workpieces needed to assemble the units, such as gripper fingers and assembly pusher fabrication, and the entire workstation assembly. In the control software development step, it took a lot of time to specify the points of each unit and design the control sequence for the many tasks.
On the other hand, for the workstation development process using RCP, it took a relatively short time to design and assemble virtual models such as cell frames, gripper fingers, and component pallets, in addition to commercial hardware such as actuators, grippers, and pneumatic cylinders. Based on that virtual workstation, it only took about a week to build control software for 45 jobs. Therefore, the actual hardware and control software completed almost simultaneously while reducing the overall workstation development time.
Development time for a SCARA robot workstation
SCARA robot and the drive angle of the robot are determined according to the mounting position using the inverse kinematics. The servo gripper also designed a program that simultaneously controls the wrist servo axis and the finger servo axis. In addition, delay was implemented to prevent interference and collision for the parallel operation of two SCARA robots.
When you develop control software based on such complex task sequences and trajectories, not only the software development time, but also the actual workstation construction time increases significantly. However, with RCP, it is possible to pre-develop the program through the virtual environment and build the actual hardware in parallel, which can significantly reduce the overall development time.
Conclusion and Future Research
CPS-based hierarchical and self-similar automation architecture for the control and verification of reconfigurable manufacturing systems. The integrated design and analysis of production lines (II) - Continuous design, analysis and optimization through digital virtual production. Towards alternatives to agent-based control in reconfigurable production systems that enable competitiveness and economic sustainability of production (pp Springer.
Virtual manufacturing for an automotive company (V) - Parametric modeling of the digital general assembly using object-oriented methods. Automatic Configuration (Plug & Produce) of Robotic Systems – Data Interpretation and Exchange Enabling Manufacturing Competitiveness and Economic Sustainability (pp. Springer. Design and Implementation of Parallel Fuzzy PID Controller for High-Performance Brushless Motor Drives: An Integrated Environment for Rapid Control Prototyping.
Accelerated design and optimization of battery management systems using HIL simulation and rapid prototyping.