This is to certify that I am responsible for the work presented in this project, that the original work is my own, except as specified in the references and acknowledgments, and that the original work contained herein was not undertaken or done by unspecified sources or persons . First and foremost, I would like to thank my family for their support and moral guidance to help me face the challenges in life. Next, I want to thank the lecturers who taught me in other fields of study.
Last but not least, I would like to thank all the friends and individuals who directly or indirectly helped me with this project. The gentle considerations of sharing expertise and skills have benefited me both in this project and in the learning cycle of life. Discussions of expected results are determined along with goals and objectives for further implementation of the results obtained.
INTRODUCTION
- Background of Study
- Problem Statement
- Objectives
- Scope of Study
Tracking rigid (does not change shape) moving targets solves the first half of the problem. The next methods that will be used are to separate which movements in the foreground image are useful and valuable information. The ability to filter out this information is essential to produce a true motion detection and object tracking result.
By having an intelligent algorithm, only specific tracking will be done and the information can be filtered. The main objective is to develop a working algorithm that is able to track a moving object in a video. The targets used will have different coloring, thus increasing the algorithm's ability to distinguish one object from another.
By having additional feature recognition, the algorithm will be more intelligent in terms of the variability of a target. Mathematical concepts such as Gaussian distribution (probability) and basic statistical approaches (standard deviation and variance) are widely used.
LITERATURE REVIEW
- Background subtraction basics
- Background Subtraction Theories
- Kalman Filter Theory
- Colour Space
- Shape Recognition …
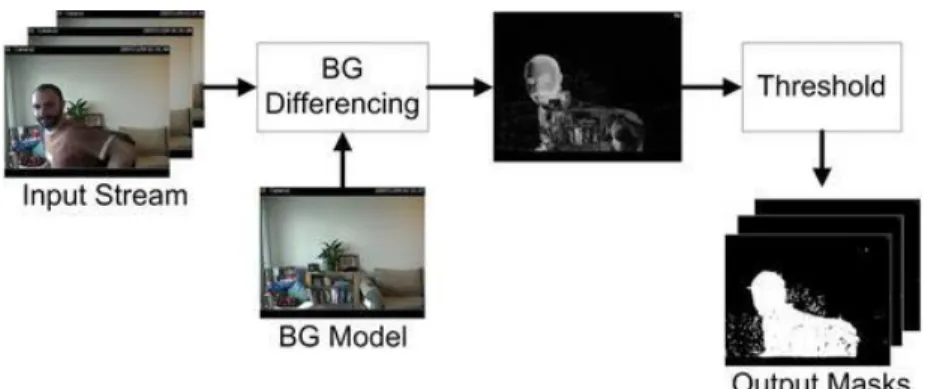
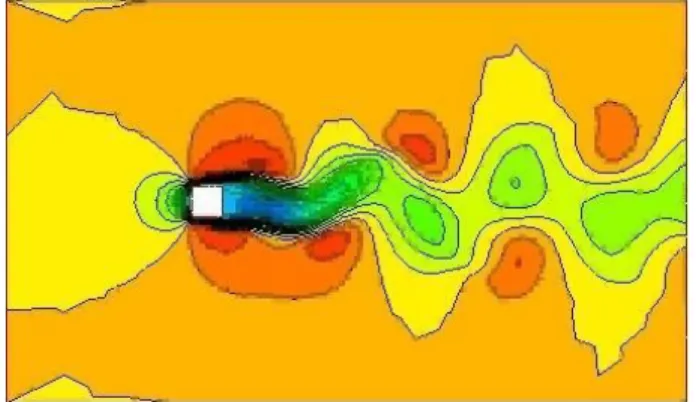
First, it uses a statistical property of the background observed over a period of time to build a model of the background. From this background model, it can be decided which pixels in the foreground (input stream) do not belong to the background model. In this approach, there is a basic assumption that the background remains unchanged in terms of geometry, reflectivity and illumination.
The background can also change very slowly at most, but a target must move. The persistence and variance of each of the Gaussians in the mixture will be used to determine which Gaussians belong to the background model. Pixel values that do not fit the background distributions will be considered foreground until a Gaussian includes it with sufficient consistent evidence.
The background method uses two parameters which are α, the learning constant, and T, the percentage of data to be calculated from the background. When none of the K distributions match, the least likely distribution is replaced with the current value as the mean value (high variance and low prior weight initially). An advantage of this update method is when it is allowed to become part of the background; the existing background model is not destroyed.
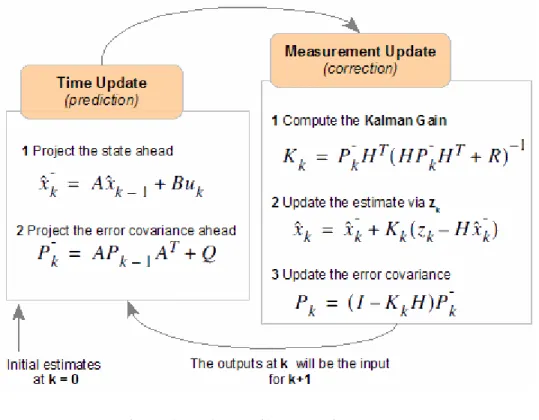
To model the background, a method is needed to decide which portion of the mixture model best represents the background model. It uses a set of mathematical equations that work recursively to minimize the mean of the squared error. The goal of the equation is to find 𝑋𝑘 which is the estimate of signal X at each subsequent k.
Its primary spectral components would be red which is located on the y-axis of the cube; green which is located on the x-axis; and blue on the z axis. The main principle in this model is based on the subtraction of the primary spectral component. When an object is placed in the background, the object is assumed to be the foreground.
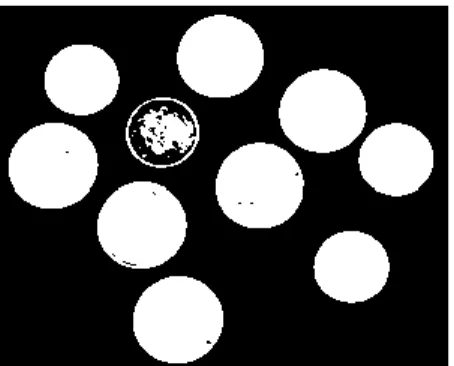
If the background level is known, the threshold value can be set to be slightly above the background value to eliminate the background and isolate the objects. There are some areas within the coin that happen to be the same gray level as the background, so it is considered a background.
METHODOLOGY
Procedure Identification
- Overall Process
- Colour Recognition …
- Shape Recognition …
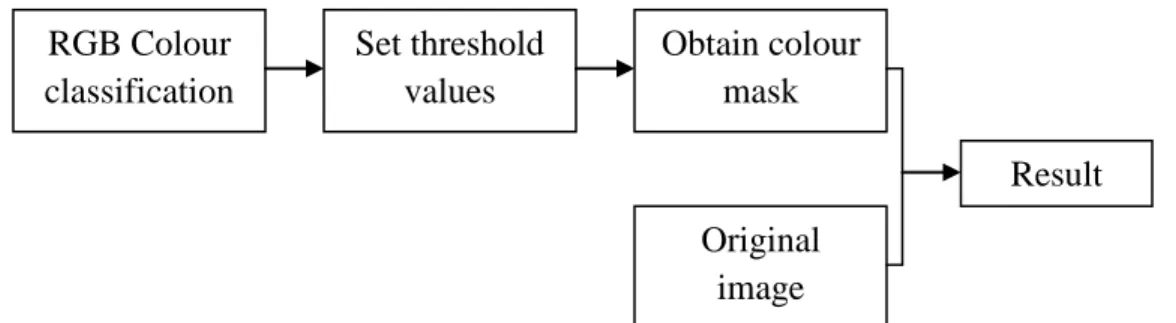
The result of the background subtraction is the output mask of the detected motion. In the shape recognition phase, many different methods will be used to determine which objects are being used. The first step in color recognition involves classifying the image into its three main spectral components, red, green and blue.
To obtain this result, an algorithm is used that counts the number of pixels belonging to a specific spectral component. Obtaining a color mask for the target pixels only requires setting certain pixels belonging to the spectral component to be a binary image. By multiplying the color mask with the original image, we can get a final image that shows only the pixels of a specific spectral component.
The algorithm first changes the image in color, saturation and value and then sets a threshold to obtain a binary image. By using grayscale levels, the histogram of the background can be found and average values are used to roughly determine the grayscale value of the background. When new objects are introduced, the histogram of the image will change and produce values that lie outside the background.
By using a threshold value, there can be a point cut for values that are within the range of the background mean. A problem can occur when using the border to eliminate the background to get only object points. The main problem is when the object has partially or completely the same values as the background.
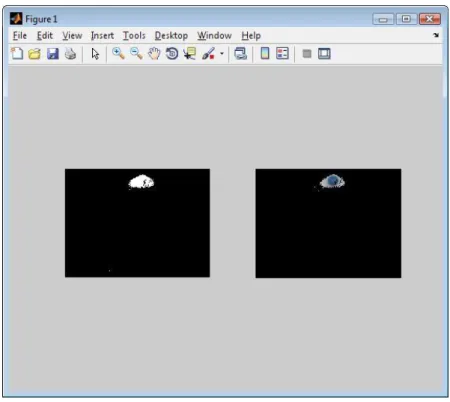
Multiplying the masked blobs with the original image will produce an image that shows only the embedded objects in the background. The key to obtaining this stain is to calculate the features of the stain to determine the shape of an object.
Tools
RESULTS AND DISCUSSION
- Background Subtraction Results
- Kalman Filtering Results
- Colour Recognition Results
- Shape Recognition Results
- Combination of Algorithms
- Discussion
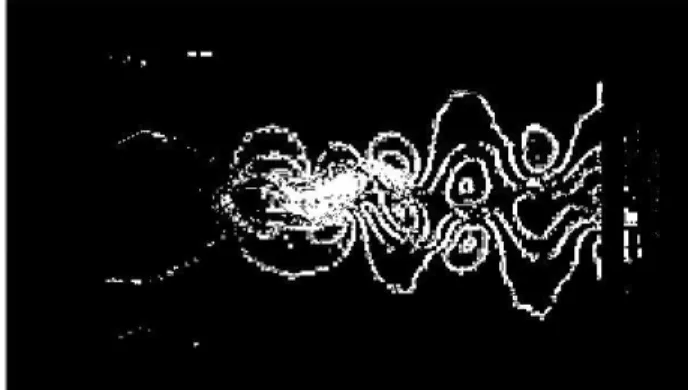
A moving ball also casts a shadow on the background, so the algorithm also hides the moving shadow. This can be easily overcome by implementing it by setting a threshold of the shadow value you want to transfer. There is a difference between the two values, but the filter result produces a very good object mask.
Since the histogram of the image consists of the red band, the values belonging to the red band are the higher the value on the histogram. The algorithm is expected to work out which colors belong to which band of red, green or blue. A high threshold (on the right side of the histogram) will produce a more limited output consisting only of higher values of the red band.
There are certainly fewer pixels compared to the figure due to the high restriction settings of the threshold. Figures 30 and 31 show the success of the algorithm that determines the RGB and secondary colors based on the RGB and HSV color space. Here the algorithm can count both the diameter and the total area.
The algorithm can be told to ignore blobs of areas larger than 2700 pixels to mask only triangles. However, the algorithm is able to realize the presence of blobs of different shapes within the area. This output will be passed to the shape recognition algorithm to determine which shape the algorithm will choose.
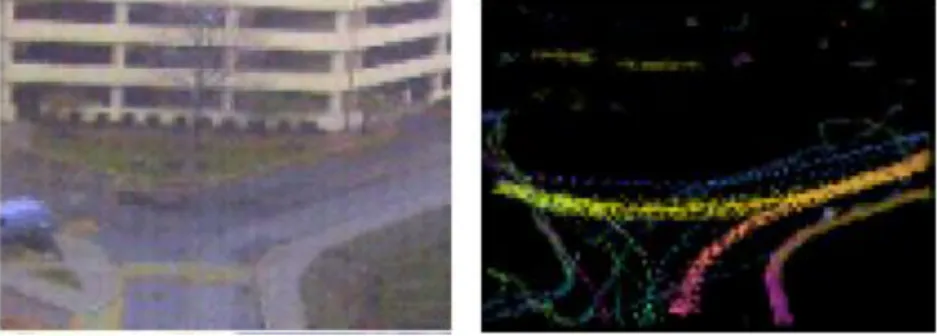
The colors present here are pseudo-colored by the algorithm to distinguish that there are three objects currently under study. Because Figure 23 has many shapes and colors, the algorithm separated the different features and characteristics. So far, the algorithm can easily determine the difference between these colors and shapes.
Since the algorithm works on a blob-based approach, any specific shape or target can be introduced. A user only needs to know the pixel area of a specific target of interest and make small adjustments to the algorithm to separate it.
CONCLUSION AND RECOMMENDATIONS
Conclusion
Recommendations