Nội dung và yêu cầu cần giải quyết trong đồ án tốt nghiệp (lý thuyết, thực hành, số liệu tính toán, hình vẽ). Cơ quan công tác: Trường Đại học Quản lý và Công nghệ Hải Phòng Nội dung giảng dạy: Toàn bộ môn học. Tinh thần, thái độ của sinh viên trong quá trình làm luận văn tốt nghiệp.
Trong quá trình thực hiện luận văn, tôi luôn nhận được sự hướng dẫn nhiệt tình và nhiều tài liệu từ thầy, TS. NGUYỄN ĐOÀN PHONG, đã nhận.
TỔNG QUAN VỀ HỆ TRUYỀN ĐỘNG ĐIỆN MỘT CHIỀU
Tổng quan về động cơ điện một chiều
- Cấu tạo, phân loai đông cơ điện một chiều
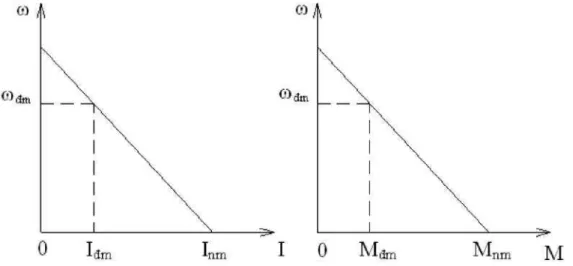
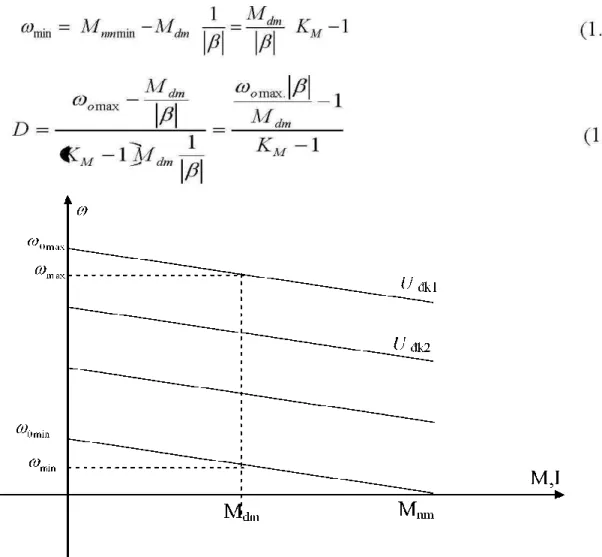
- Đặc tính cơ của động cơ điện một chiều
Trong động cơ DC nhỏ, lõi sắt phần ứng được ép trực tiếp vào trục. Động cơ DC kích thích song song: Cuộn dây kích từ được mắc song song với phần ứng. Động cơ DC kích từ nối tiếp: Cuộn dây kích từ mắc nối tiếp với phần ứng.
Lúc này, động cơ được gọi là động cơ DC kích từ độc lập [2].
Các phương pháp điều khiển tốc độ động cơ điện một chiều
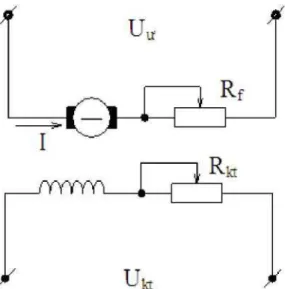
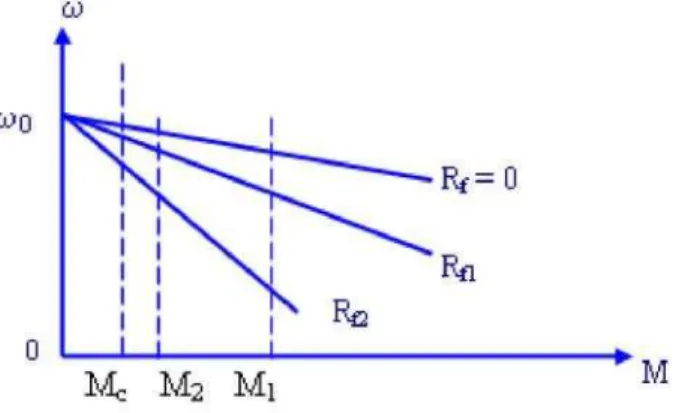
- Phương pháp thay đổi điện trở phần ứng
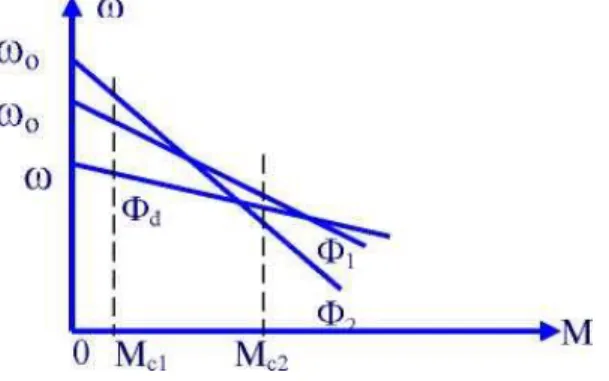
- Phương pháp thay đổi từ thông
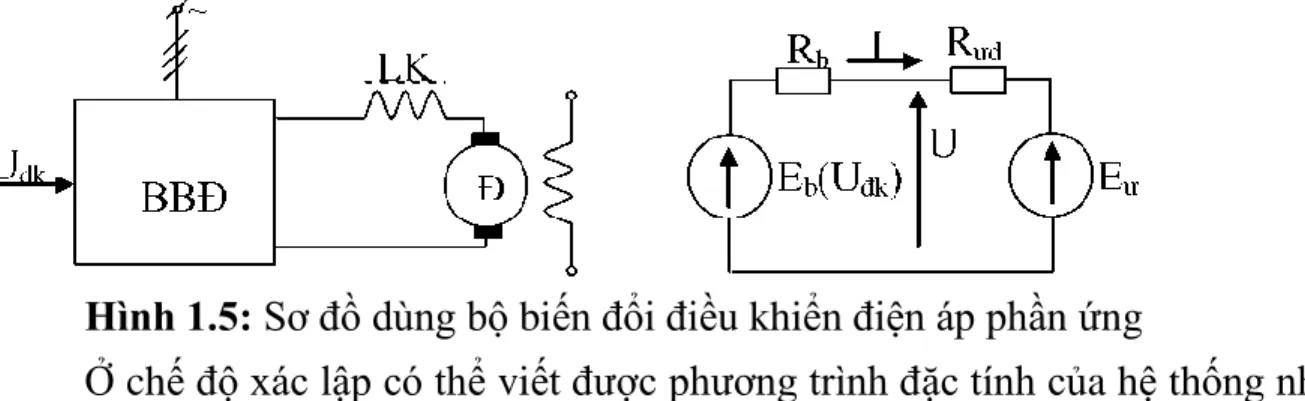
- Phương pháp thay đổi điện áp phần ứng
Các phương pháp điều khiển tốc độ động cơ DC - Phương pháp thay đổi điện trở phần ứng. Phương pháp này chỉ cho phép điều chỉnh tốc độ trong phạm vi dưới tốc độ định mức (chỉ cho phép thay đổi tốc độ khi rơi). Kiểm soát tốc độ bằng cách thay đổi từ thông là phương pháp kiểm soát hiệu ứng không đổi.
Đây gần như là phương pháp duy nhất dành cho động cơ điện một chiều khi cần điều chỉnh tốc độ lớn hơn tốc độ lái.
Giới thiệu một số hệ truyền động điện một chiều
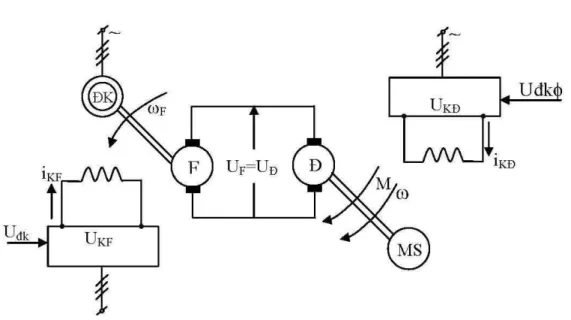
- Hệ truyền động máy phát - động cơ điện một chiều (F - Đ)
Cũng có thể điều chỉnh kích thích động cơ để có phạm vi điều chỉnh tốc độ rộng hơn. Bộ chuyển đổi điện áp xung là nguồn điện áp dùng để điều chỉnh tốc độ của động cơ điện một chiều [3]. Khởi động là quá trình đưa động cơ từ trạng thái nghỉ (đứng yên) sang trạng thái làm việc quay với tốc độ định mức.
Phương pháp giảm điện áp khi đánh lửa động cơ không đồng bộ a) Sử dụng cuộn kháng, b) Sử dụng máy biến áp tự ngẫu;. Phương pháp điều chỉnh này chỉ áp dụng cho động cơ cảm ứng rôto dây quấn. Đặc tính cơ học của động cơ cảm ứng rôto dây quấn khi thay đổi điện trở rôto được thể hiện trên hình 2.21.
Khi điện trở rôto tăng lên, tính chất cơ học trở nên mềm hơn, nếu mômen điện trở không đổi thì tốc độ động cơ có thể thay đổi theo hướng giảm dần. Đặc tính cơ của động cơ không đồng bộ khi điện áp nguồn thay đổi. Đặc tính cơ của động cơ cảm ứng dây quấn khi thay đổi điện trở rôto.
Lúc này, máy hoạt động như một động cơ đồng bộ nhận nguồn điện từ mạng P4 và Q4 (điện cảm). Stator PMSM của động cơ đồng bộ có cuộn dây từ trường giống như rôto.
MÁY ĐIỆN KHÔNG ĐỒNG BỘ
Lý luận chung về máy điện không đồng bộ
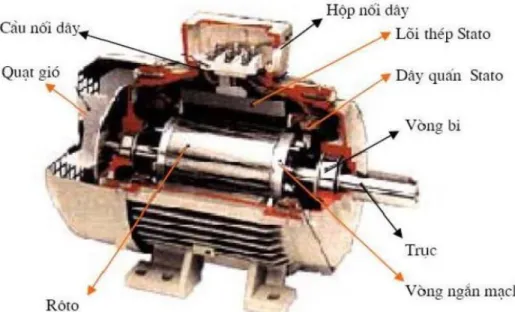
- Kết cấu
- Nguyên lý làm việc
- Các trị số định mức
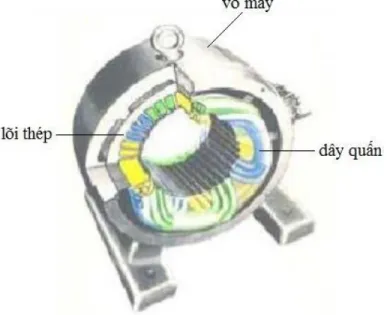
Hộp máy: để cố định lõi thép và dây quấn, không dùng làm mạch từ. Dây quấn: đặt trong rãnh của lõi thép và cách điện tốt với rãnh. Lõi thép: từ tính, làm bằng các tấm thép cách điện, có rãnh ở bên ngoài.
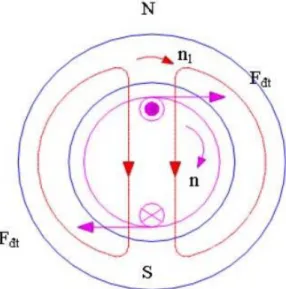
Rôto lồng sóc: trong mỗi rãnh đặt một thanh dẫn hướng bằng đồng hoặc nhôm kéo dài từ lõi thép và được nối ngắn mạch ở hai đầu bằng hai vòng ngắn mạch. Khi ta đặt dòng điện ba pha có tần số vào cuộn dây stato sẽ tạo ra một từ trường quay với tốc độ nhanh. Từ trường quay cắt các cuộn dây rôto và sinh ra suất điện động.
Vì cuộn dây rôto là một mạch kín nên suất điện động cảm ứng sẽ tạo ra dòng điện trong dây dẫn rôto. Dòng điện trong từ trường chịu tác dụng của lực điện từ và tạo ra mô men quay làm cho rôto quay với tốc độ n.
Khởi động động cơ không đồng bộ
- Khởi động trực tiếp
- Khởi động dùng phương pháp giảm dòng khởi động
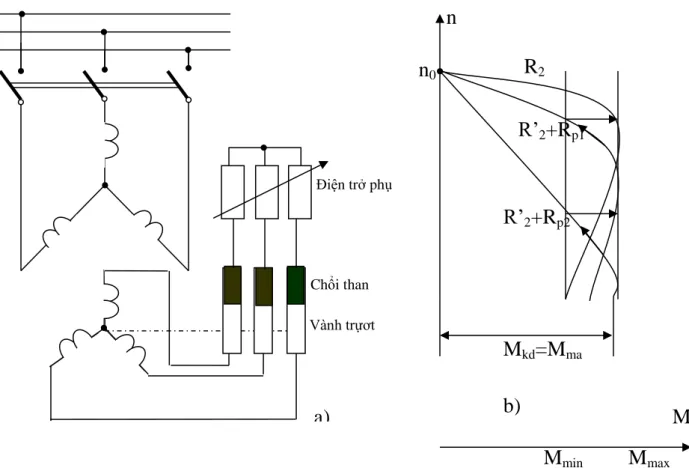
Trong phương pháp này, nếu chọn điện trở Rp thích hợp, bạn có thể đạt được mômen khởi động bằng giá trị mô men xoắn cực đại trong Hình 4.11b. Ở lần khởi động đầu tiên, toàn bộ điện trở khởi động được truyền sang rôto, bằng cách tăng số vòng quay của rôto thì điện trở khởi động từ rôto cũng giảm dần, để khi số vòng quay đạt giá trị danh định thì máy khởi động cũng đã tắt hoàn toàn. từ rôto, rôto lúc này trở thành rôto ngắn mạch. Để giảm điện áp khởi động, sử dụng các phương pháp sau: cuộn kháng, máy biến áp tự ngẫu và kết nối sao-tam giác.
Đặc điểm chung của các phương pháp giảm điện áp là ngoài việc giảm dòng khởi động thì mômen khởi động cũng giảm. Vì khi khởi động cuộn dây stato hình sao, điện áp trên stato nhỏ hơn 3 lần nên khi chuyển sang mạch tam giác dòng điện giảm 3 lần, mô men xoắn giảm 3 lần. Ngày nay, nhờ sự phát triển của công nghệ điện tử, người ta đã chế tạo được các bộ biến tần có đặc tính kỹ thuật cao, giá thành rẻ nên có thể áp dụng phương pháp khởi động tần số.
Phương pháp khởi động này đảm bảo rằng dòng khởi động không vượt quá giá trị dòng định mức. Trong những năm gần đây, để cải thiện khả năng đánh lửa của động cơ cảm ứng lồng sóc, ngoài phương pháp đánh lửa tần số, người ta còn áp dụng phương pháp đánh lửa mềm. Bản chất của phương pháp khởi động mềm là kiểm soát dòng điện khởi động khi thay đổi điện áp.
Dòng khởi động Ikd được đo từ máy và được so sánh với dòng Iref đã đặt. Nếu Iref - Ikh=Δε ≠ 0, tín hiệu này sẽ tác động lên bộ điều chỉnh RI. Nếu Δε > 0 điều khiển để tăng góc mở của các điện trở, điều này đồng nghĩa với việc tăng điện áp đặt vào stato của động cơ.Nếu Δε < 0 tác động theo chiều làm giảm điện áp đặt vào rôto thì kết quả là dòng điện khởi động luôn bằng nhỏ hơn cài đặt hiện tại.
Điều chỉnh tốc độ động cơ không đồng bộ
- Mở đầu
- Thay đổi tần số nguồn điện cung cấp f 1
- Thay đổi số đôi cực
- Điều chỉnh tốc độ bằng thay đổi điện trở mạch rô to
ĐỘNG CƠ ĐỒNG BỘ
Động cơ đồng bộ
- Tính chất động của động cơ đồng bộ
- Khởi động động cơ đồng bộ
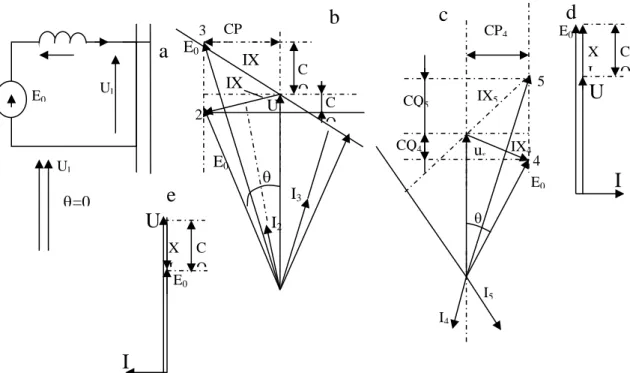
Máy điện đồng bộ nối lưới sau khi hòa đồng bộ có thể hoạt động như một máy phát điện hoặc như một động cơ tùy theo phụ tải. Để giải thích điều này, chúng tôi sử dụng sơ đồ vectơ của máy đồng bộ cực ngầm. Ở chế độ này, nếu chúng ta chỉ tăng dòng kích thích (quá kích thích) thì máy sẽ tạo ra dòng điện cảm ứng, còn nếu chúng ta giảm dòng điện kích thích thì máy sẽ tạo ra dòng điện phản kháng.
Đầu tiên chúng ta hãy xem xét một máy điện đồng bộ không có bất kỳ thiết bị phụ trợ đặc biệt nào. Cuộn dây trường được kết nối với nguồn 1 chiều trong khi cuộn dây phần ứng được kết nối với nguồn điện 3 pha tạo ra từ trường quay với tốc độ. Tóm lại, có thể nói rằng máy đồng bộ không có mômen khởi động (Mtb = 0).
Chúng tôi sử dụng máy hybrid bên ngoài (động cơ đồng bộ, hoặc động cơ DC, v.v.) để quay rôto động cơ đồng bộ đến tốc độ cần thiết để kết nối với lưới điện. Nếu bỏ qua cuộn dây kích từ thì khi cuộn dây 3 pha nối vào lưới, một dòng điện 3 pha sẽ chạy vào và tạo ra từ trường quay khiến rôto quay giống như một máy không đồng bộ. 2. nntt chiều quay của từ trường so với stato sẽ ngược chiều với trường hợp.
2. nntt, do đó mô men xoắn do nó sinh ra sẽ ngược chiều với chiều mô men xoắn sinh ra bởi cuộn dây khởi động và từ trường dương. Hiểu được đặc tính này của máy điện đồng bộ sẽ hữu ích trong trường hợp động cơ cảm ứng dây quấn 3 pha bị đứt pha trong rôto.
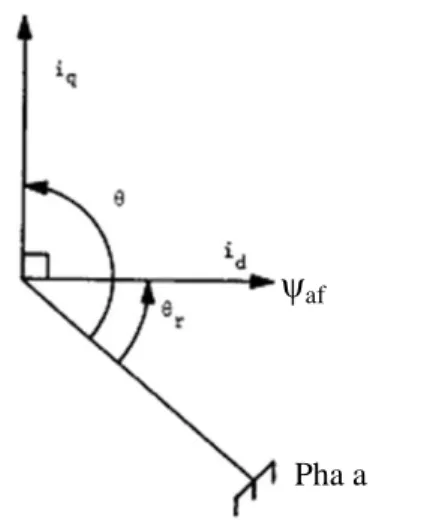
Một số ứng dụng động cơ đồng bộ
- Cấu tạo của động cơ PMSM
- Nguyên lý hoạt động của động cơ PMSM
- Mô hình máy PMSM
- Điều khiển tốc độ động cơ PMSM
- Điều khiển véc tơ máy PMSM
- Bộ điểu khiển dải trễ
- Bộ điều chỉnh PWM
PMSM thường được điều khiển bằng vectơ (FOC) hoặc điều khiển mô-men xoắn trực tiếp (DTC). Giả sử điện áp mạch DC được lọc đúng cách. Sáu van Tl-T6 được sử dụng để điều khiển 3 dòng điện ba pha stato. Chiến lược điều khiển như sau: Giá trị tức thời của dòng điện ia và ib.
Sở dĩ nó được gọi là bộ điều khiển trễ là vì sự chuyển đổi điện áp pha xảy ra giữ cho dòng điện nằm trong phạm vi trễ đó, do đó dòng điện pha có dạng gần như hình sin. Phương pháp thứ hai dùng để điều khiển dòng điện stator là sử dụng bộ điều khiển dòng điệnPWM, giá trị tức thời của dòng điện 3 pha stator được đo và so sánh với dòng điện thực tế. Nó được gọi là bộ điều khiểnPWM vì nó tạo ra điện áp có độ rộng xung thay đổi.
Với bộ điều khiển phạm vi độ trễ, tần số chuyển đổi phụ thuộc vào giá trị của cửa sổ độ trễ và tần số chuyển đổi yêu cầu thực tế của biến tần không được biết trước. Ưu điểm của bộ điều khiển dòng điện dải trễ so với bộ điều khiển PLC từ góc độ điều khiển là không có độ trễ chuyển đổi hoặc độ trễ hệ thống. Với bộ điều khiểnPWM, độ trễ trung bình bằng một nửa chu kỳPWM sẽ không bị vượt quá.
Qua trình bày trên có thể thấy rằng: do điều khiển véc tơ chuyển đổi PMSM thành máy điện một chiều có kích thích độc lập nên hàm truyền mô men và dòng điện là tuyến tính. Kết quả này không đúng đối với động cơ xoay chiều không sử dụng điều khiển véc tơ vì mô hình là phi tuyến tính.