Nội dung và yêu cầu cần giải quyết trong đồ án tốt nghiệp (lý thuyết, thực hành, số liệu tính toán, hình vẽ). Thân Ngọc Hoàn đã hướng dẫn tôi thiết kế đồ án tốt nghiệp với đề tài: “Xây dựng hệ thống khởi động mềm cho động cơ không đồng bộ có m=const”.
ĐỘNG CƠ KHÔNG ĐỒNG BỘ VÀ CÁC PHƯƠNG
- MỞ ĐẦU
- CẤU TẠO
- CẤU TẠO CỦA STATO
- Cấu tạo của rôto
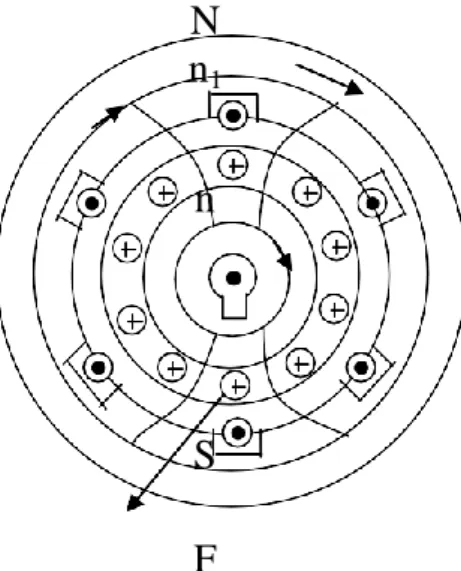
- NGUYÊN LÝ LÀM VIỆC CỦA MÁY ĐIỆN DỊ BỘ
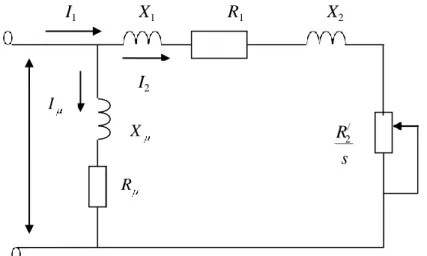
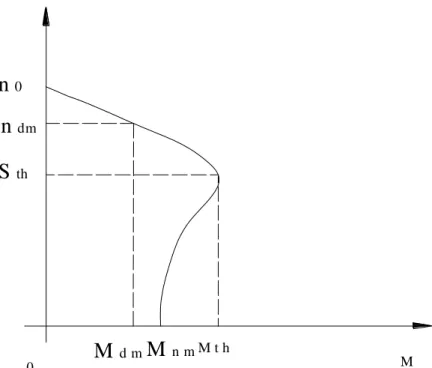
- PHƯƠNG TRÌNH ĐẶC TÍNH CƠ
- CÁC PHƯƠNG PHÁP KHỞI ĐỘNG CỦA ĐỘNG CƠ DỊ BỘ
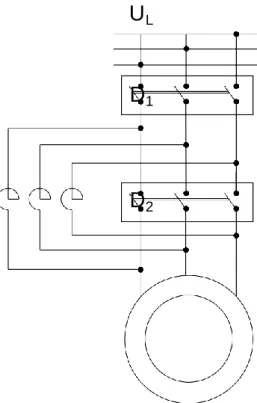
- Khởi động trựctiếp
Một trong những mục tiêu chính mà Đảng và Nhà nước đặt ra cho mình là quá trình phát triển công nghệ, hiện đại hóa đất nước. Để thực hiện công nghệ hóa, hiện đại hóa, các công ty phải xây dựng lại nhà xưởng, cơ sở sản xuất, thiết bị, máy móc để đưa công nghệ hiện đại hóa vào sản xuất.
HỆ THỐNG KHỞI ĐỘNG MỀM ĐỘNG CƠ KHÔNG
MỞ ĐẦU
Động cơ không đồng bộ ba pha được sử dụng rộng rãi trong công nghiệp vì chúng có cấu tạo đơn giản, hoạt động tin cậy nhưng có nhược điểm là dòng khởi động lớn gây sụt áp trên lưới điện. Ngoài việc tránh dòng điện cực đại khi khởi động động cơ còn giúp điện áp nguồn ổn định hơn mà không gây ảnh hưởng xấu đến các thiết bị khác trong lưới. Phương pháp khởi động được áp dụng ở đây là giới hạn điện áp ở cực động cơ và tăng dần điện áp theo chương trình thích hợp để điện áp tăng tuyến tính từ giá trị cài đặt đến điện áp định mức.
Là quá trình khởi động mềm (đoạn đường nối), toàn bộ quá trình khởi động được điều khiển bằng cách đóng mở thyristor bằng vi điều khiển với các cổng vào và ra tương ứng, tần số trung gian không đổi theo tần số của điện áp nguồn. Hãy cho chúng tôi biết rằng phương pháp này phù hợp hơn với động cơ dẫn động các máy thủy lực như máy bơm, quạt, v.v. Đối với các ứng dụng có mômen cản không đổi thì mômen quay phải nhỏ hơn mômen khởi động.
HỆ THỐNG KHỞI ĐỘNG MỀM
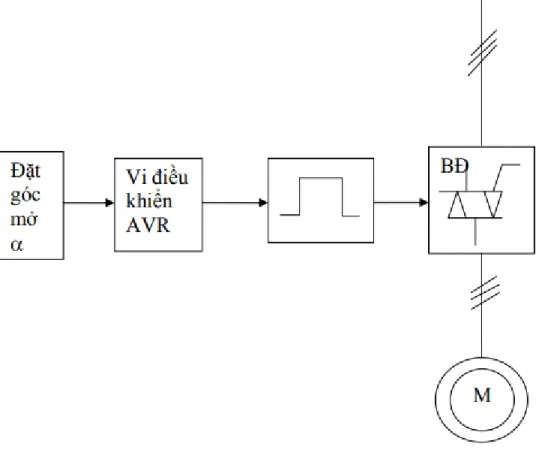
- Sơ đồ hệ thống
- Nguyên lý hoạt động của hệ thống
Bước đầu chúng ta thiết lập góc mở và nạp chương trình điều khiển cho vi điều khiển. Từ các thông số đã thiết lập, vi điều khiển nhận tín hiệu đồng bộ rồi so sánh, tính toán để tạo ra xung mở triac tại bộ điều chỉnh điện áp. Khi động cơ lần đầu tiên nối lưới, do tốc độ động cơ bằng 0 nên suất điện động của động cơ nhỏ, dòng điện chạy qua động cơ lớn nên dòng điện không lớn nên điện áp đặt vào ô tô là áp dụng. nhỏ bé Lúc này góc mở của tam giác lớn. .
Khi động cơ bắt đầu quay, suất điện động của động cơ lớn, dòng điện chạy qua động cơ giảm, để đảm bảo mômen khởi động của động cơ không nhỏ, chúng ta cần giảm góc mở triac. Chúng tôi đã liên tục thay đổi điện áp cấp vào động cơ, mang lại mô-men xoắn khởi động lớn. Khi động cơ đang chạy, chúng tôi ngắt kết nối bộ chuyển đổi khỏi động cơ và kết nối trực tiếp động cơ với điện áp lưới.
BỘ ĐIỀU CHỈNH ĐIỆN ÁP XOAYCHIỀU
- Sơ đồ đấu sao có trung tính
- Sơ đồ tải đấu tam giác
- Sơ đồ đấu sao không trung tính
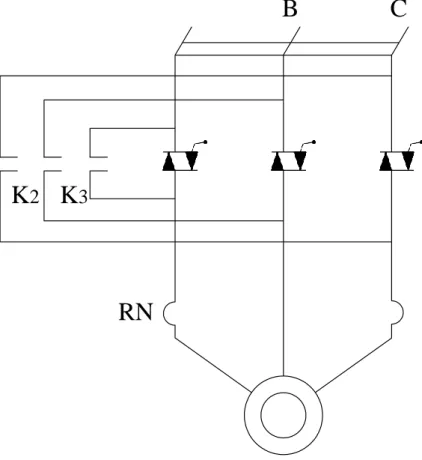
Hoạt động của bộ ổn áp xoay chiều ba pha nối sao không có dây trung tính là hoạt động kết hợp pha. Việc điều chỉnh điện áp của bộ điều chỉnh điện áp ba pha sóng trung tính phụ thuộc vào góc. Việc xác định điện áp phải dựa trên chương trình làm việc của thyristor.
Chúng tôi lưu ý rằng trong hệ thống điện áp ba pha, dòng điện có thể chạy qua cả ba pha hoặc chỉ qua hai pha. Khi dòng điện chạy qua cả ba pha thì điện áp trên mỗi pha bằng điện áp pha. Khi dòng điện chạy qua cả hai pha thì điện áp trên pha tương ứng bằng 1/2 điện áp đường dây.
![2.3.2. Sơ đồ tải đấu tam giác[4]](https://thumb-ap.123doks.com/thumbv2/1libvncom/10301989.0/28.893.313.630.115.497/2-3-sơ-đồ-tải-đấu-tam-giác.webp)
VI ĐIỀU KHIỂN AVR
- Các đặc điểm chính của AVR
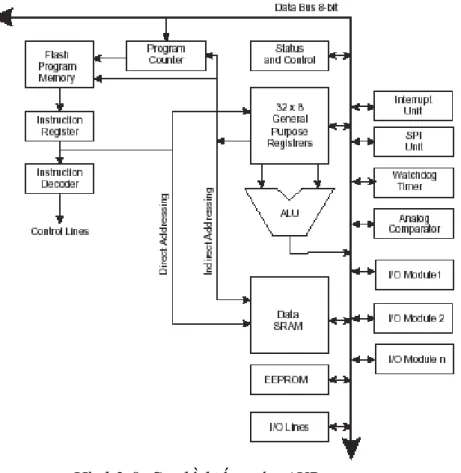
- Kiến trúc vi điều khiểnavr
- Đơn vị xử lý số học và logic ( ALU – Arithmetic LogicUnit)
- Tệp các thanh ghi đa năng ( General Purpose Register File)
- Điều khiển ngắt và reset (Reset and Interrupt Handling)
- Bộ nhớ
Không gian bộ nhớ I/O có 64 địa chỉ cho các chức năng ngoại vi của CPU như thanh ghi điều khiển, SPI và các chức năng I/O khác. Mỗi thanh ghi được gán một địa chỉ bộ nhớ dữ liệu, đặt chúng trực tiếp vào 32 vị trí đầu tiên của không gian dữ liệu người dùng. Các thanh ghi này là các con trỏ địa chỉ 16 bit cho chế độ đánh địa chỉ gián tiếp của không gian dữ liệu.
Các thanh ghi I/O trong không gian địa chỉ $00-$1F có thể truy cập trực tiếp các bit bằng lệnh SBI và CBI. Khi đánh địa chỉ các thanh ghi I/O dưới dạng vùng dữ liệu, hãy sử dụng lệnh LD và ST và thêm $20 vào các địa chỉ này. Các thanh ghi này có địa chỉ từ 0x1F có thể được truy cập trực tiếp dưới dạng bit bằng cách sử dụng các lệnh SBI, CBI và SBIC.
KẾT LUẬN CHƯƠNG 2
Vị trí I/O được truy cập bằng lệnh LD/LDS/LDD và lệnh ST/STS/STD, lệnh này chuyển đổi dữ liệu giữa 32 thanh ghi mục đích chung và không gian I/O. Trong các thanh ghi này, giá trị của các bit đơn có thể được kiểm tra bằng lệnh SBIS và SBIC. Để tương thích với các thiết bị trong tương lai, các bit dự phòng được đặt thành 0 nếu được truy cập.
Các thanh ghi I/O mục đích chung: ATmega 8 có 3 thanh ghi I/O mục đích chung. Các thanh ghi này có thể được sử dụng để lưu trữ bất kỳ thông tin nào, đặc biệt hữu ích để lưu trữ các biến toàn cục và trạng thái cờ.
GIỚI THIỆU
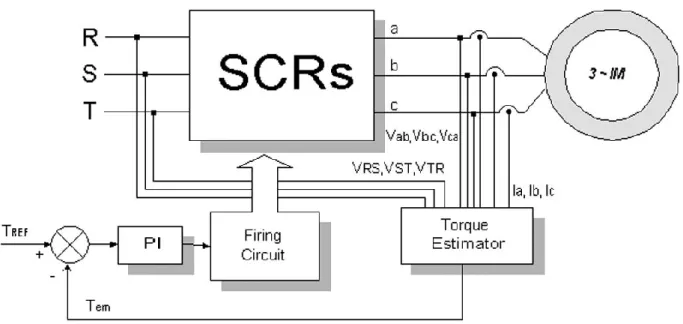
Chiến lược điều khiển dòng điện được đề xuất bao gồm các hàm cos liên tiếp và các đoạn hàm không đổi của góc kích hoạt thyristor. Do đó, kỹ thuật được sử dụng trong [1] và [2] để khởi động IM bằng bộ khởi động mềm dựa trên điều khiển vòng kín có giới hạn dòng điện. Công nghệ điều khiển hiện tại này có thể cung cấp mô-men xoắn không đổi trong quá trình khởi động và giữa các lần khởi động.
Vì vậy, có vẻ như một giải pháp tốt để giải quyết vấn đề này là điều khiển trực tiếp mômen điện từ trong quá trình khởi động. Ở đây, một kỹ thuật điều khiển mô-men xoắn được đề xuất để loại bỏ các xung mô-men điện từ và giữ dòng điện gần như không đổi ở một giá trị xác định trước trong toàn bộ thời gian khởi động mềm. Các chức năng điều khiển, bảo vệ và giám sát của kỹ thuật đề xuất được thực hiện trong bộ vi điều khiển.
MÔ TẢ HỆ THỐNG VÀ NGUYÊN TẮC HOẠT ĐỘNG
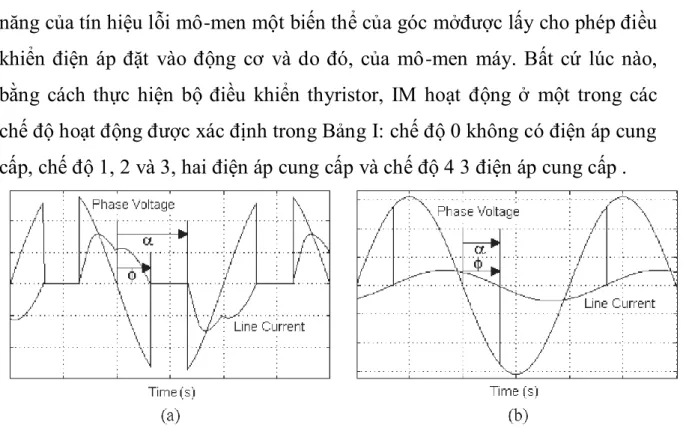
Thyristor được điều khiển theo cách tương tự như ở chế độ 1, 2 và 3, nhưng trong trường hợp này có thể thấy rằng góc mở α có giá trị p tối thiểu là 3 (60˚), tức là điện áp tối đa. Độ lớn và góc của từ thông stato ước tính có thể được viết là. Độ lệch đo có thể giảm xuống giá trị chấp nhận được bằng cách đưa ra điều chỉnh bù ở đầu vào của INT [12] hoặc điều này có thể được thực hiện với sự trợ giúp của bộ lọc thông cao (HPF) [15].
Trong trường hợp này, người ta cũng có thể thấy sự tồn tại của số 0 trên vòng tròn đơn vị và cực phụ thuộc vào giá trị của α, giá trị này phụ thuộc vào tần số cắt. Sau đó, các bộ lọc tương tự sẽ được loại bỏ bằng cách sử dụng phép biến đổi song tuyến tính (hoặc Phương pháp Tustin) với tốc độ lấy mẫu là 250 μs. Người ta có thể quan sát rằng tốc độ lấy mẫu dẫn đến tần số Nyquist cao hơn nhiều so với tần số hoạt động được chỉ định ở mục 1), dẫn đến giá trị độ méo rất thấp đối với các tín hiệu rời rạc. Về HPF, người ta có thể quan sát thấy rằng các sai số cường độ trong dải tần số được chỉ định trên thực tế là bằng 0 và do đó không cần phải sửa chúng.
KẾT QUẢ THỰC NGHIỆM
Hiệu suất ban đầu của kỹ thuật điều khiển mô-men xoắn được đề xuất cho Động cơ 1. Hiệu suất ban đầu của kỹ thuật điều khiển mô-men xoắn được đề xuất cho Động cơ 1. Hiệu suất ban đầu của kỹ thuật điều khiển mô-men xoắn -men được khuyến nghị cho Động cơ 2.
Có thể thấy rằng, trong ví dụ này, dòng điện rms tuân theo hành vi tham chiếu mômen trục. Dòng điện tuân theo quy luật tham chiếu mômen trục, nó giảm bất kể kỹ thuật điều khiển nào, dù do giới hạn dòng điện hay do giới hạn dòng điện. Kiểm soát mô-men xoắn là sự giới hạn mô-men xoắn theo một tham chiếu áp đặt.

KẾT LUẬN CHƯƠNG 3
Barlak, “Soft starting of large induction motors at constant current with minimal starting torque pulsations,” IEEE Trans. Berg, “A new approach to dynamic modeling and transient analysis of SCR-controlled induction motors,” IEEE Trans. Berg, “Steady-state performance analysis of SCR-controlled induction motors: a closed-form solution,” IEEE Trans.
Fahirn, “Analysis and application of a three-phase induction motor voltage controller with improved transient performance,” IEEE Trans. Rahman, “Semiconductor direct starter for medium voltage induction motors with minimum current and torque pulses,” IEEE Trans. Novotny, “Implementation of direct stator flux orientation control on a versatile DSP-based system,” IEEE Trans.
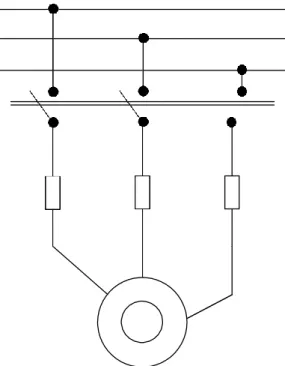
![2.3.1. Sơ đồ đấu sao có trung tính[4]](https://thumb-ap.123doks.com/thumbv2/1libvncom/10301989.0/27.893.323.649.433.800/2-3-1-sơ-đồ-đấu-trung-tính.webp)
