CẤU TẠO CỦA BIẾN TẦN
TÌM HIỂU BIẾN TẦN
- Khái niệm biến tần
- Phân loại biến tần
- Tầm quan trọng của biến tần trong công nghiệp
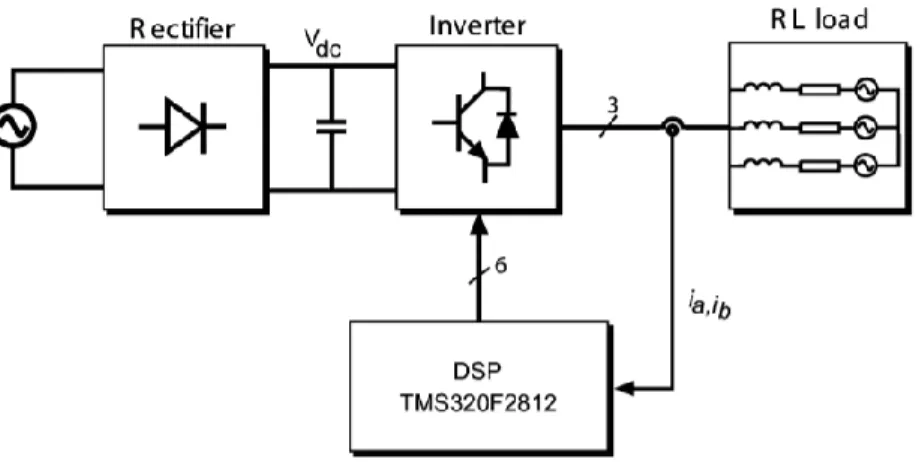
SƠ ĐỒ KHỐI VÀ NGUYÊN LÍ HOẠT ĐỘNG
- Sơ đồ khối
- Nguyên lí hoạt động
- Các chức năng của màn hình hiển thị và các phím
Đầu ra ở mức L thấp khi tần số đầu ra của biến tần luôn cao hơn tần số. Chọn tần số từ đầu ra và tần số đầu ra là tuyến tính. Điện áp đầu ra được tạo xung để có thể kết nối đồng hồ hiển thị kỹ thuật số. Biến tần có nhiệm vụ chuyển đổi điện áp DC thành điện áp xoay chiều với tần số thay đổi.
CÁC THAM SỐ CÀI ĐẶT
- Các chức năng ứng dụng của tham số
Có thể cài đặt tần số và thời gian tăng/giảm tốc cho hoạt động nhảy Hoạt động nhảy có thể được thực hiện từ tín hiệu bên ngoài hoặc PU. Đặt 1A, 2A hoặc 3A làm điểm nhảy hoạt động ở các tần số này. Trong quá trình tăng tốc và giảm tốc, tần số vận hành đã cài đặt sẽ bị bỏ qua.
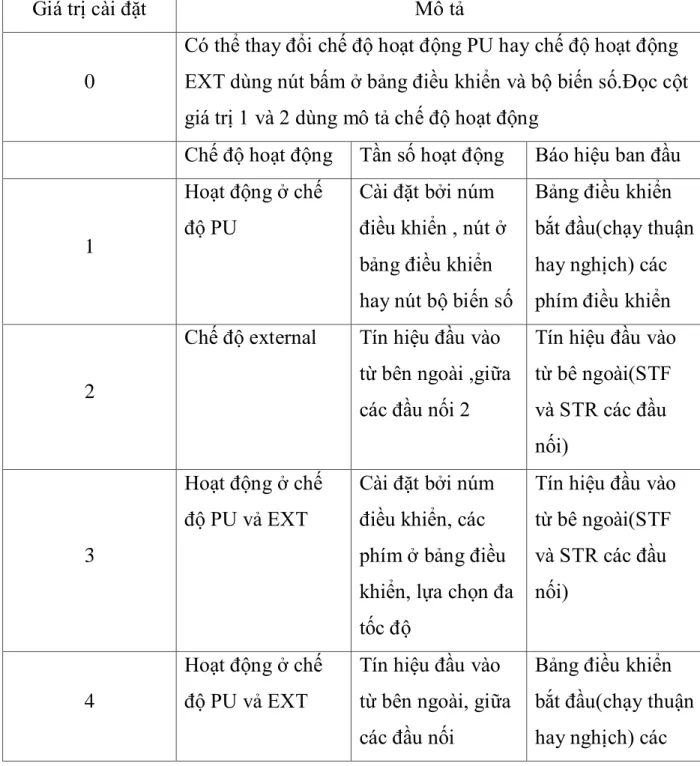
Tốc độ tức thời của các máy như băng tải có thể được điều chỉnh. Chúng ta có thể đặt bảng điều khiển từ màn hình để hiển thị tốc độ vận hành trong cùng khoảng tốc độ của máy đang sử dụng. Biến tần có 2 chế độ vận hành: vận hành ở chế độ điều khiển bên ngoài và vận hành ở chế độ PU (bảng điều khiển và phần thông số). Tham số này có thể được thiết lập để sử dụng cả hai một cách riêng biệt. Giá trị cài đặt Thông số này có thể được thay đổi trong chế độ điều khiển bên ngoài. Chế độ vận hành PU hoặc chế độ vận hành EXT có thể được thay đổi thông qua các nút trên bảng điều khiển và trên biến tần. Đọc cột giá trị 1 và 2 để mô tả chế độ vận hành.
Công tắc hoạt động ở chế độ tín hiệu bên ngoài (không thể bật trong quá trình hoạt động). Lựa chọn PU được kích hoạt khi tín hiệu X16 TẮT _ Lựa chọn EXT được kích hoạt khi tín hiệu X16 BẬT. Pr.79 =6 (chế độ thay thế) khi cài đặt có thể được thay đổi để hoạt động ở chế độ PU hoặc EXT bất kỳ lúc nào.
Lưu ý: việc cài đặt các tham số này không cho phép điều khiển PID PR128-134 trong quá trình vận hành PU. Pr.133 Thiết lập điểm vận hành Pid cho hoạt động PU Pr.134 Thiết lập thời gian Pid. 5 Lựa chọn chức năng vận hành nhảy JOG 6 CS Tín hiệu đầu vào rơle nhiệt bên ngoài 7 OH Chọn chức năng tự động khởi động lại.
BIẾN TẦN NGUỒN
Khái niệm
Các loại biến tần nguồn áp
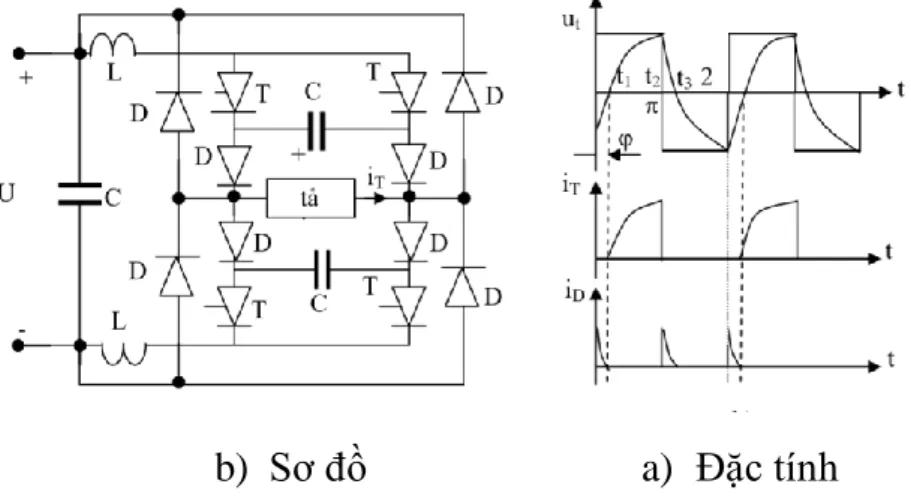
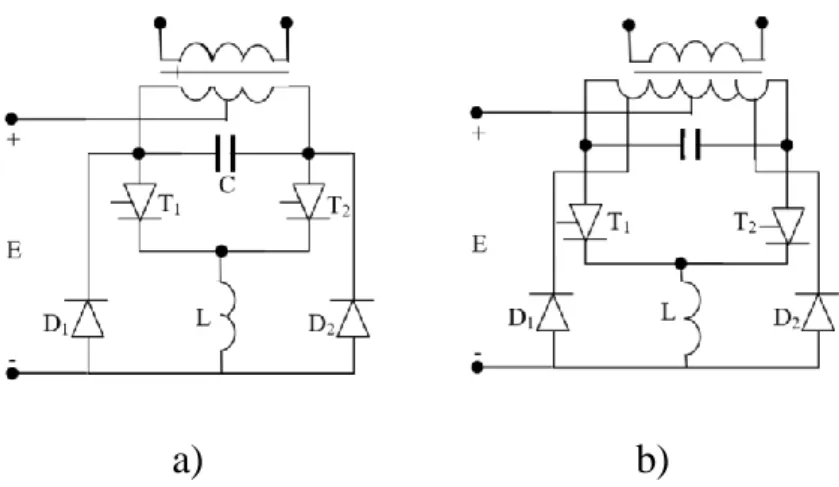
- Biến tần nguồn áp một pha (Bộ nghịch lưu áp cầu một pha)
- Hệ thống Mac – Maray – Betfor
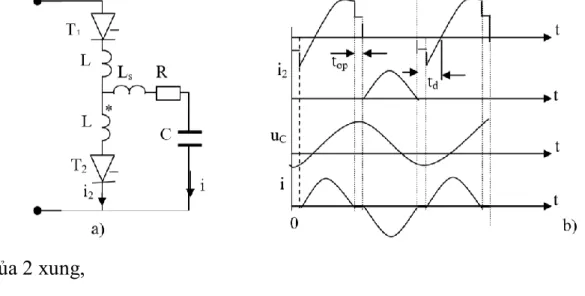
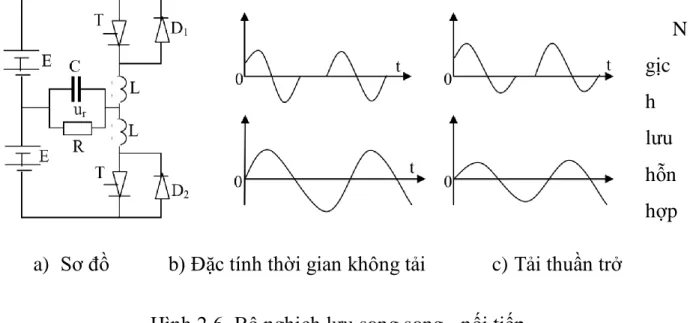
- Bộ nghịch lưu nối tiếp
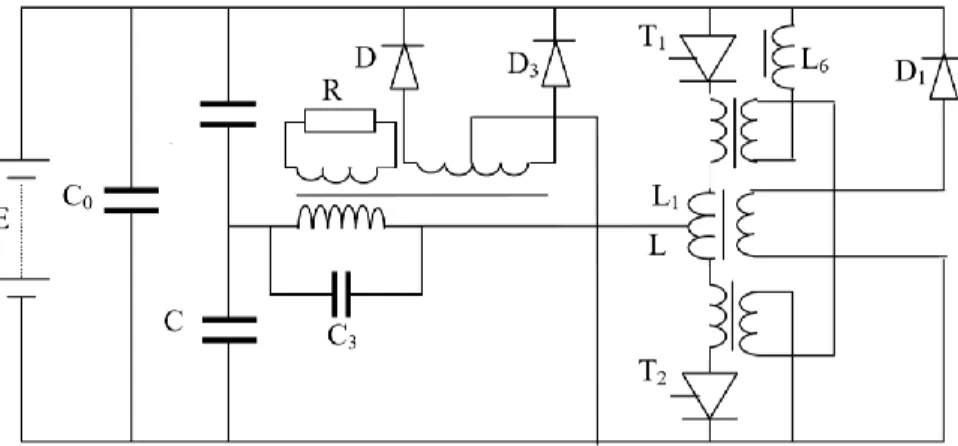
- Nghịch lưu hỗn hợp (song song- nối tiếp)
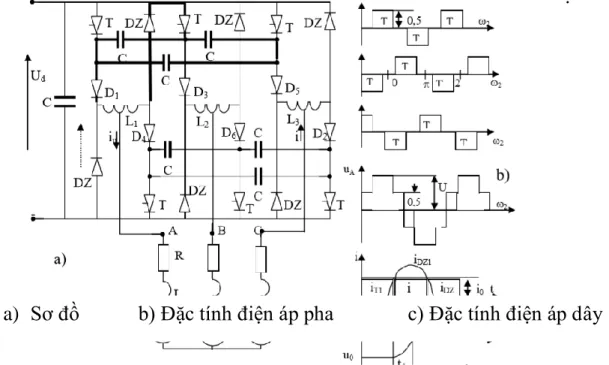
- Biến tần nguồn áp ba pha
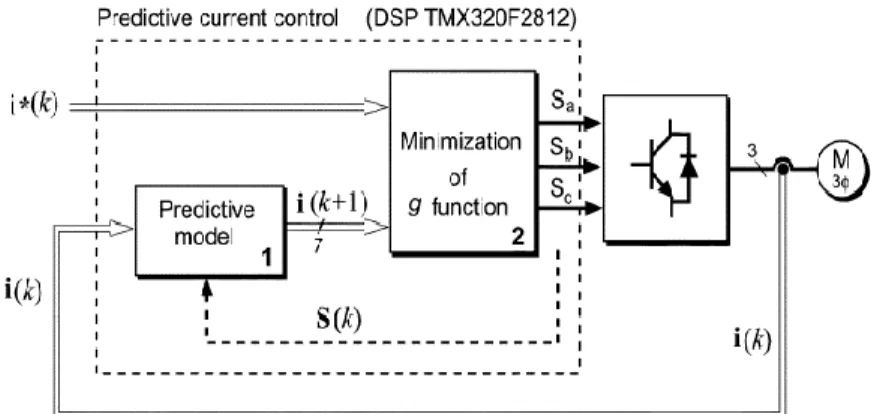
Người ta sử dụng điều khiển dự đoán để tính toán điện áp tải cần thiết nhằm tối ưu hóa hoạt động hiện tại. Chiến lược điều khiển được thực hiện trên bộ xử lý tín hiệu số (DSP). Một bảng có tất cả các trạng thái chuyển mạch có thể được sử dụng để tạo tín hiệu đầu ra nhằm điều khiển IGBT trong biến tần.
Trong Hình 12(a), có thể thấy rằng điều khiển trễ tạo ra điện áp đầu ra tần số rộng và liên tục. Một chiến lược dự đoán về kiểm soát hiện tại và việc thực hiện nó trong thực tế được trình bày.
Phương pháp này đơn giản và thuật toán điều khiển dễ thực hiện trên DSP. Chiến lược đề xuất tránh sử dụng các bộ điều khiển tuyến tính và phi tuyến tính. Linder, Điều khiển dự đoán các bộ biến tần được cung cấp bằng truyền động, trực tiếp tại Proc.
Kukrer, Điều khiển dòng điện thời gian rời rạc của ba pha cung cấp điện áp.
KIỂM SOÁT DÒNG ĐIỆN CỦA BIẾN TẦN NGUỒN
Giới thiệu
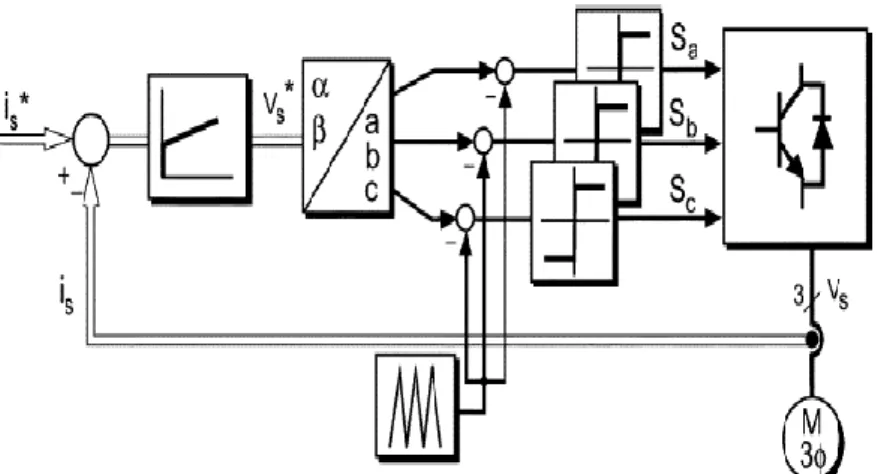
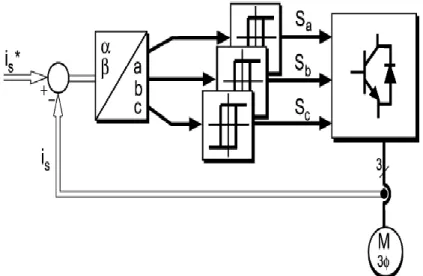
Điều khiển dự đoán là một khái niệm rất rộng và nhiều phương pháp điều khiển khác nhau được trình bày dưới tên này. Chiến lược này đã được sử dụng trong điều khiển dòng điện cho các bộ biến tần [6] [7], cũng như cho các bộ lọc và bộ chỉnh lưu tích cực [8]. Một biến thể của phương pháp này tính toán chu kỳ hoạt động của các xungPWM cần thiết cho trạng thái hiện tại [9] [10]. Trong chiến lược điều khiển này, như trong Hình 3.1, dòng tải đo được được so sánh với dòng tham chiếu bằng bộ so sánh trễ.
Đây là một trong những nhược điểm chính của điều khiển độ trễ, vì việc chuyển đổi giữa các tần số thay đổi có thể gây ra vấn đề cộng hưởng. Dòng tham chiếu được lấy từ bộ điều khiển bên ngoài vòng lặp (ví dụ: vòng điều khiển tốc độ). Thuật toán điều khiển được trình bày chi tiết dưới dạng sơ đồ trong Hình 6.
So sánh điều khiển dòng điện dự đoán được đề xuất với điều khiển trễ và điều khiển xung thông thường được trình bày trên hình 3.9. Điều này được thực hiện để đánh giá khả năng tách của vòng điều khiển hiện tại. Thuật toán điều khiển dễ thực hiện và thời gian cũng như tài nguyên xử lý còn lại có thể được sử dụng cho các tác vụ khác như kiểm soát tốc độ.
Do tầm quan trọng của mô hình được sử dụng để điều khiển, độ tin cậy của phương pháp điều khiển đối với sai số trong các giá trị điện cảm và điện trở tải của mô hình đã được nghiên cứu. Liserre, Điều khiển dự đoán các bộ lọc nửa cầu tích cực, trong Proc. Stadtfeld, Bộ điều khiển dự đoán dòng điện stato vectơ của máy điện xoay chiều được cung cấp bởi nguồn điện áp chuyển mạch, trong Proc.
Các phương pháp kiểm soát lớp
- Điều khiển hiện tại trễ
- Điều khiển dòng tuyến tính với PWM
Mô tả kiểm soát hiện tại hiện tại
- Chiến lược kiểm soát
- Chức năng chất lượng
- Mô hình biến tần
- Mô hình tải
- Mô hình thời gian rời rạc
- Lựa chọn véc tơ điện áp
Thực hiện chiến lược kiểm soát
- Cân nhắc thực tế
- Thuật toán điều khiển
Kết quả mô phỏng
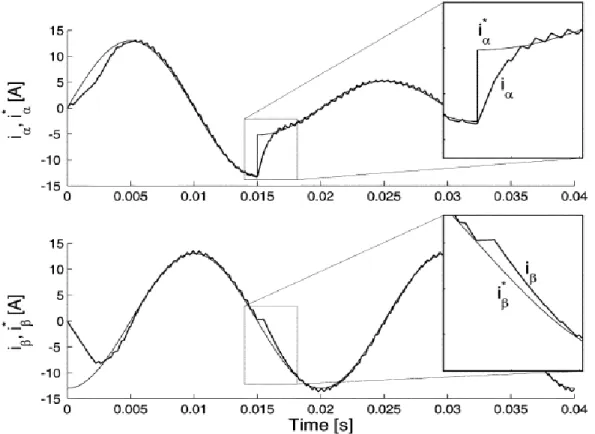
Mô phỏng bộ biến tần được điều khiển bằng ba phương pháp điều khiển dòng điện khác nhau đã được thực hiện bằng MATLAB/SIMULINK, để đánh giá hiệu suất của phương pháp dự đoán được đề xuất so với các sơ đồ cổ điển. Với mục đích so sánh, các tham số bộ điều khiển của phương pháp cổ điển được xem xét trong công việc này được thiết kế để đạt được tần số chuyển mạch trung bình tương đương. Phản hồi điều khiển được dự đoán hiện tại cho cùng một thử nghiệm được thể hiện trong Hình 11.
Phản hồi động nhanh như phản hồi thu được bằng điều khiển trễ, nhưng có sự tách rời vốn có giữa cả hai thành phần dòng chảy. Phổ tần số của Hình 12(b) cho thấy nội dung hài được tạo ra khi sử dụng điều khiển dòng điện xung quanh tần số sóng mang. Do chất lượng của chiến lược điều khiển phụ thuộc vào mô hình được sử dụng để dự đoán hành vi của dòng điện tải, nên ảnh hưởng của sai số trong các giá trị điện cảm và điện trở tải đến sai số bình phương trung bình của dòng tải được thể hiện trong Hình 13.
Tuy nhiên, sai số trong điện cảm tải có tầm quan trọng lớn đối với dòng tải dự đoán và do đó ảnh hưởng đến hoạt động của bộ điều khiển dòng điện. Như được hiển thị trong Hình 13, việc ước tính giá trị điện cảm thấp hơn có ảnh hưởng sâu sắc nhất đến sai số dòng điện so với việc ước tính giá trị cao hơn. Việc sử dụng giá trị nhỏ hơn có thể làm tăng độ trễ trong quá trình theo dõi tham chiếu, như trong Hình 14(a).
Đối với các giá trị cao hơn, đặc tính của dòng điện tải được thể hiện trong Hình 14(b).
Kết quả thực nghiệm
Thời gian tính toán được DSP sử dụng để thực hiện điều khiển công suất trong các điều kiện đã đề cập trước đó là ít hơn 7 giờ. Nó cho thấy rằng phương pháp đề xuất để điều khiển dòng tải hiệu quả cao có đáp ứng động tốt và có thể so sánh rất tốt với các phương pháp cổ điển. Hiệu suất điều khiển sẽ giảm đi nếu điện cảm ước tính thấp hơn giá trị thực tế nhưng hầu như không bị ảnh hưởng bởi việc đánh giá quá cao giá trị điện cảm.
Hơn nữa, khả năng tính toán cao của các DSP hiện nay làm cho phương pháp này trở nên rất hấp dẫn trong việc điều khiển các bộ chuyển đổi công suất. Những kết quả này cho thấy kiểm soát dự đoán là một công cụ rất mạnh mẽ với cách tiếp cận khái niệm khác. Em hiểu khái niệm về máy chuyển đổi, cách phân loại máy chuyển đổi, bao gồm máy chuyển đổi trực tiếp và máy chuyển đổi gián tiếp. Biết đọc sơ đồ khối và trình bày sơ đồ nguyên lý hoạt động của các loại bộ chuyển đổi thông dụng. , hiểu các giá trị và giá trị của bộ chuyển đổi trong thực tế cũng như phạm vi của bộ chuyển đổi trong công nghiệp cũng như các ứng dụng thực tế của chúng.
Ưu điểm của phương pháp này là khả năng kết hợp các đặc tính phi tuyến của hệ thống để giảm thiểu khó khăn trong quá trình, phương pháp này có các phương pháp điều khiển đơn giản như điều khiển độ trễ dòng điện và điều khiển dòng điện tuyến tính với điều khiển xung và điều khiển luồng, cuối cùng là các chiến lược điều khiển thực tế với các thuật toán điều khiển. GPC) đã sẵn sàng để sử dụng trong các ứng dụng đĩa chưa?, Trong Proc. Viarouge, công cụ triển khai và phân tích bộ điều khiển dự đoán theo thời gian thực cho các bộ điều khiển servo nam châm vĩnh cửu đồng bộ, IEEE IEEE Trans.
Tent, dự đoán kỹ thuật số có hướng dẫn về các giả định công suất, trực tiếp trong Proc.