PERANCANGAN RANGKA CHASIS MOBIL LISTRIK UNTUK 4 PENUMPANG MENGGUNAKAN SOFTWARE 3D SIEMENS NX8
Teks penuh
Gambar

Dokumen terkait
Hitungan 5 : Ayun kedua kaki ke depan, kaki kanan ditekuk, kaki kiri lurus sambil mengayun kedua lengan ke atas, telapak tangan menghadap ke dalam.. Hitungan 6 dan 7 : Tahan
Hasil pengujian pada sistem secara real berupa mapping jalur yang ditempuh AR.Drone selama pengujian dan kurva RMSE jarak AR.Drone menuju titik referensi yang digunakan
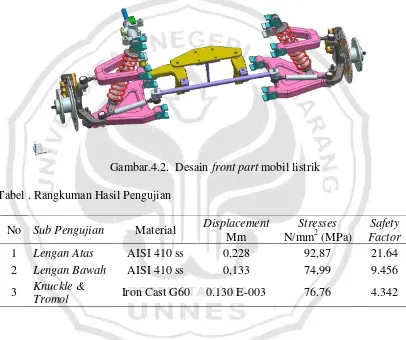
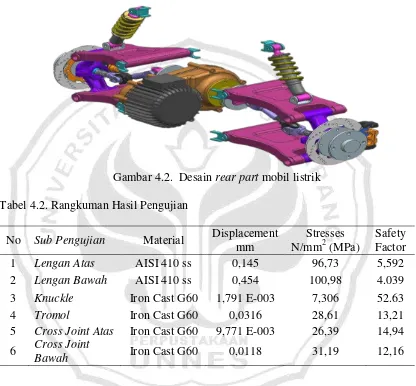
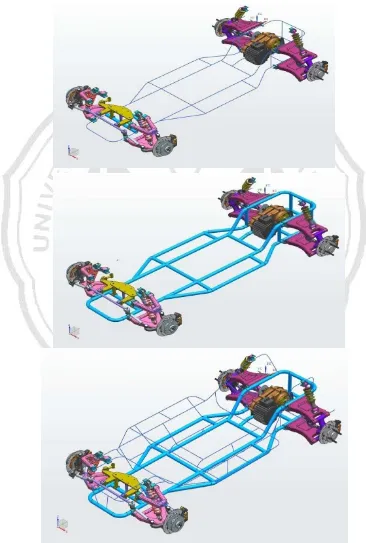
dari hasil simulasi pada bagian depan dan atas model mobil tidak terjadi perubahan signifikan dengan perubahan variasi sehingga tidak dianalisis, sedangkan pada bagian
Pengujian dilakukan dengan cara memberi perintah kontrol belok kanan, belok kiri, maju dengan kecepatan 1, maju dengan kecepatan 2 dan maju dengan kecepatan 3 sebanyak 5
Sedangkan jika nilai yang dibaca sensor ultrasonik kanan dan kiri lebih besar dari 30 maka kursi bergerak maju dengan kecepatan putar motor DC adalah 50% dari kecepatan
Penelitian yang telah dilakukan menghasilkan kesimpulan yaitu alat yang telah dibuat mampu untuk mendeteksi halangan dari tiga arah yang berbeda (depan, serong kanan dan serong
Sedangkan jika nilai yang dibaca sensor ultrasonik kanan dan kiri lebih besar dari 30 maka kursi bergerak maju dengan kecepatan putar motor DC adalah 50% dari kecepatan
Sampling yang digunakan adalah 6 unit dengan masing-masing unit memiliki 4 buah baut di bagian kanan dan kiri untuk dibandingkan dengan hasil pengencangan baut-U menggunakan Tool 4
