Sistem Kendali Kecepatan Motor DC Dengan Menggunakan Mikrokontroler
Teks penuh
Gambar

Dokumen terkait
Seiring dengan kemajuan teknologi, permasalahan pada dunia industri tentang ketidakstabilan dari kecepatan motor DC sangatlah kompleks, sehingga ketika motor DC
Hasil pengujian kecepatan motor DC dengan pembebanan membuktikan bahwa kendali PID mampu mempertahankan kecepatan akibat pembebanan sehingga kecepatan motor DC dapat kembali
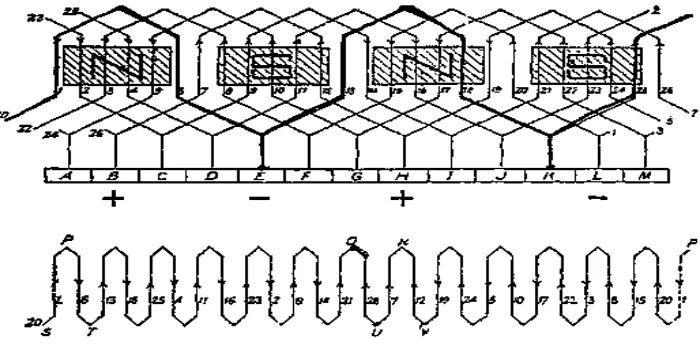
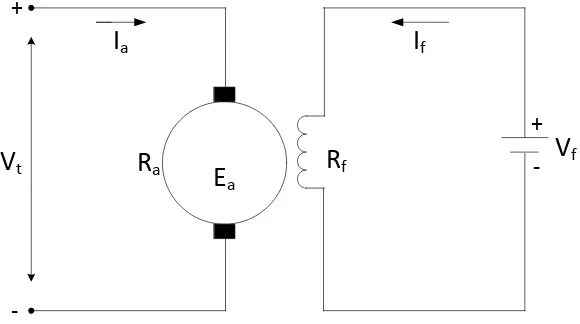
arah arus elektron yang mengalir pada kumparan jangkar. Poros motor DC dapat berputar searah jarum jam dan berlawanan
diinginkan baik itu secara manual maupun dengan memasukkan nilai kecepatan motor yang diinginkan pada tampilan program pada setiap pengujian sistem. Ucapan
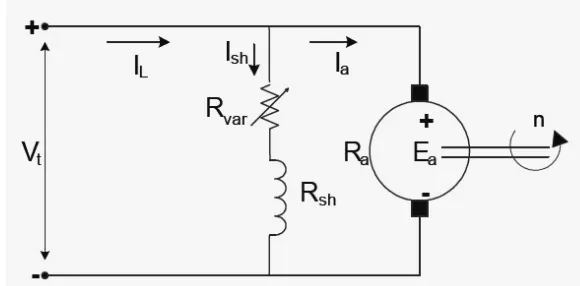
Pengandalian motor DC dilakukan menggunakan sistem kendali cascade PI yang mengendalikan kecepatan putar motor DC dengan dua loop sistem yaitu loop kendali tegangan
diinginkan baik itu secara manual maupun dengan memasukkan nilai kecepatan motor yang diinginkan pada tampilan program pada setiap pengujian sistem. Ucapan
Dengan mengadakan pengendalian fuzi yang fungsi keanggotaan masukan seperti dalam gambar 4a, 4b dan 4c didapatkan hasil tanggapan kecepatan motor terhadap perubahan step set
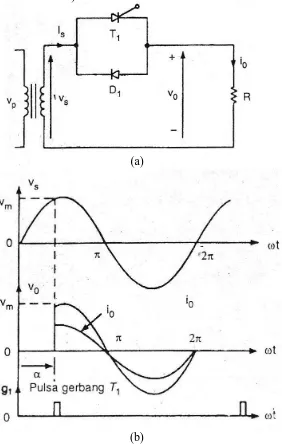
Analisa Pengaturan Kecepatan Putaran Motor DC Penguat Dengan Menggunakan Thyristor Marliyus Sunarhati 33 4.2.3 Karakteristik Fungsi Arus Jangkar Terhadap Kecepatan Putaran Rpm
