KENDALI FUZI KECEPATAN MOTOR DC, DENGAN METODA
CHOPPER, BERBASIS MIKROKONTROLER 89C51
Bambang Sutopo1)dan Erwin2)
1)Staf Pengajar Jurusan Teknik Elektro, Fakultas Teknik UGM 2). Mahasiswa S1 TE-UGM
ABSTRAK
Pengendalian kecepatan putar motor DC dapat dilakukan dengan mengubah besar tegangan terminal motor. Sistem pencincang tegangan DC (chopper) adalah cara yang sederhana dan efisien dalam mengubah besar tegangan DC. Algoritma fuzi bisa digunakan sebagai algoritma untuk menentukan besarnya tegangan sesuai dengan kecepatan yang dikehendaki. Penggunaan mikrokontroler membuat sistem kendali menjadi fleksibel dalam pengubahan algoritma pengendalian tanpa mengubah sistem perangkat keras. Sistem mikrokontroler memberi fasilitas EEPROM (Electrically Erasable Programmable Read Only Memory), sehingga mempercepat proses pengubahan program.
Dalam penelitian ini dilakukan tiga cara penyusunan keanggotaan fuzi masukan dan diamati tanggapan kecepatan terhadap perubahan beban. Sistem penyusunan keanggotaan masukan menentukan besarnya deviasi kecepatan dan kecepatan tanggapan sistem. Penentuan keanggotaan ini sangat diperngaruhi pengetahuan perancang dalam sistem yang dikendalikan.
Kata kunci : chopper, DC, fuzi, mikrokontroler
Pendahuluan
Motor DC mempunyai keunggulan dalam kehalusan perubahan kecepatan, kemudahan pengendaliannya, dan tanggapan dinamis yang cepat terhadap perubahan torsi beban, sehingga masih digunakan dalam banyak aplikasi industri.
Sistem Chopper banyak digunakan di industri karena serhana dalam konstruksi dan efiiensi yang tinggi, terlebih digunakan FET sebagai saklar pemutus tegangan.
Sistem mikrokontrller merupakan alat batu kendali yang sangat tepat untuk mendapatkan sistem yang nyata, kompak, kecil, handal dan dapat diprogram. Sistem mikrokontror 89C51 diguanakan karena menggunakan sistem EEPROM sehingga dalam modifikasi program dapat dilakukan sangat cepat, hal ini dapat memperpendek waktu perancangan dan implementasi.
Algoritma fuzi merupakan algoritma baru yang menggunakan logika manusiawi dalam cara menentukan besaran sinyal kendali. Walapun algoritma ini sudah banyak digunakan
dalam industri tetapi masih perlu banyak penelitian untuk menghasilkan algoritma pengendalian yang baik.
Dasar Teori
Motor DC dapat diatur kecepatan
berdasarkan persamaan sbb :
φ
k
R
I
V
N
=
−
a a ... (1)N : kecepatan putar motor V : tegangan terminal motor Ia : arus jangkar
Ra : hambatan jangkar
k : konstanta
φ : banyaknya fluksi
Dalam kasus pengendalian kecepatan putar motor, tegangan terminal motor (V) merupakan variabel yang dapat diatur untuk menghasilkan putaran yang diinginkan. Dalam penelitian ini pengaturan besarnya dilakukan dengan proses Chopper.
Gambar 1. Proses pengubahan tegangan DC ke DC dengan metode Chopper.
Besarnya tegangan output dinyatakan sebagai :
in on out
V
T
T
V
=
×
(2)Substitusi pers (1) ke pers (2) didapatkan :
φ
k
R
I
T
T
N
a a on−
=
(3)Besaran T dibuat tetap, dan besaran Ton
diatur sesuai kebutuhan kecepatan putaran N. Dalam mengendalikan kecepatan motor digunakan besaran masukan yang berupa selisih kecepatam motor dengan kecepatan yang diinginkan, biasa disebut dengan error, dan laju perubahan kecepatan itu sendiri, biasa disebut
change of error. Terhadap kedua besaran ini
dilakukan fuzifikasi. Algoritma fuzi digunakan
untuk menentukan besarnya Ton berdasarkan
hasil fuzifikasi masukan tadi. Sinyal kendali terbut dihasilkan setelah dilakukan defuzifikasi dengan menetapkan aturan keanggotaan keluaran tertentu.
Implementasi
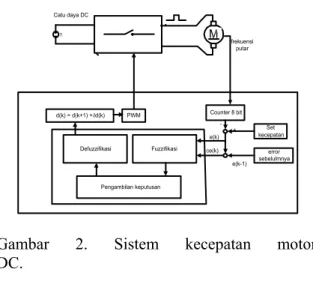
Implementasi perangkat keras sistem chopper dan pengendali fuzi dapat dilihat pada gambar 2. Sistem mikrokontroler digunakan untuk mengolah algoritma fuzi. Sistem chopper digunakan transistor 2N3055.
Gambar 2. Sistem kecepatan motor
DC.
Gambar 3 menunjukkan diagram alir proses fuzifikasi dan defuzifikasi pengendalian.
Gambar 3. Diagram alir proses pengendalian kecepatan motor DC
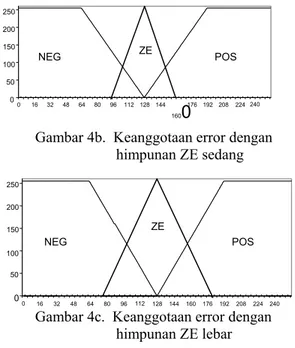
Rancangan fuzifikasi masukan dirumuskan dengan coba-coba dalam gambar 4a, 4b dan 4c.
Gambar 4a. Keanggotaan error dengan himpunan ZE sempit Counter 8 bit Set kecepatan error sebelulmnya Fuzzifikasi Pengambilan keputusan Defuzzifikasi d(k) = d(k+1) + δd(k) PWM Catu daya DC + -e(k) ce(k) e(k-1) DC M frekuensi putar MULAI INISIALISASI TAMPILAN AWAL
Tombol Stop Ditekan
Tombol Naik Ditekan
Tombol Turun Ditekan
Tombol Jalan Ditekan
Ukur Kecepatan Saat Ini
Tampilkan
Proses Fuzi
Kirim data serial
Ada Tombol ditekan T T T Y Y Y Y SP = SP + 1 SP = SP - 1 Y T T 0 50 100 150 200 250 0 16 32 48 64 80 96 112 128 144 160 176 192 208 224 240 POS NEG ZE Tegangan ( V ) Tegangan ( V ) waktu waktu Vin Vout Ton T chopper Vin
0 50 100 150 200 250 0 16 32 48 64 80 96 112 128 144 160
0
176 192 208 224 240 POS NEG ZE 0 50 100 150 200 250 0 16 32 48 64 80 96 112 128 144 160 176 192 208 224 240 POS NEG ZEGambar 4b. Keanggotaan error dengan himpunan ZE sedang
Gambar 4c. Keanggotaan error dengan himpunan ZE lebar
Inferensi
Proses inferensi adalah mencari himpunan keluaran yang bersesuaian dengan kondisi masukan dalam suatu basis aturan. Dalam penelitian ini ditetapkan basis aturan sbb : 1. Jika kecepatan motor lebih besar dari set point maka tegangan terminal motor harus dikurangi agar kecepatan turun. Laju perubahan kecepatan tak berpengaruh. (Aturan A)
2. Jika kecepatan motor masuk himpunan kecepatan sama dengan kecepatan yang diinginkan maka laju perubahan diperhatikan dalam mengelurarkan tegangan kendali. (Aturan B,C,D)
3. Jika kecepatan motor lebih kecil dari set point maka tegangan motor harus dikurangi agar kecepatan naik. Laju perubahan kecepatan tak berpengaruh. (Aturan E)
Kelima aturan tersebut bisa dijabarkan dalam tabel dibawah ini.
Tabel 1. Aturan logika fuzi
Error Negatif ZE Positif Neg Aturan B ZE Aturan C Laju Error Pos Aturan D Aturan A Aturan E Defuzifikasi.
Proses defuzifikasi adalah proses mengubah distribusi fuzi hasil inferensi menjadi besaran yang sebenarnya untuk sinyal kendali. Dalam penelitian ini dipilih keanggotaan keluaran berupa himpunan fuzi singleton di gambar 5, untuk menyederhanakan dalam perhitungan di dalam bahasa asembler.
Gambar 5. Himpunan keanggotaan keluaran
Metode yang digunakan adalah Mean of Maximum dengan rumus sebagai berikut :
Hasil Penelitian dan Pembahasan
1. Tanggapan motor tanpa pengendalian terhadap pembebanan tiba-tiba.
Bila motor dalam keadaan tanpa
pengendalian kemudian secara tiba-tiba beban bertambah maka tanggapan kecepatan seperti tampak pada gambar 6.
Gambar 6. Tanggapan motor terhadap
perubahan beban tanpa pengendalian Dengan perubahan beban sebesar 0,5N maka kecepatan motor mengalami penurunan sekitar 600 RPM. X 0 3 0 0 6 0 0 9 0 0 1 2 0 0 1 5 0 0 1 8 0 0 0 . 0 0 1 . 8 8 3 . 7 5 5 .6 3 7 . 5 0 9 . 3 81 1 . 2 51 3 . 1 31 5 . 0 01 6 . 8 81 8 .7 52 0 .6 22 2 . 5 02 4 . 3 72 6 . 2 52 8 . 1 23 0 .0 03 1 .8 73 3 . 7 53 5 . 6 23 7 . 5 0 w a k t u ( d e t ik ) kecepat an( rpm ) P e m b e b a n a n 0 ,5 N
2. Tanggapan motor terkendali fuzi
terhadap perubahan step.
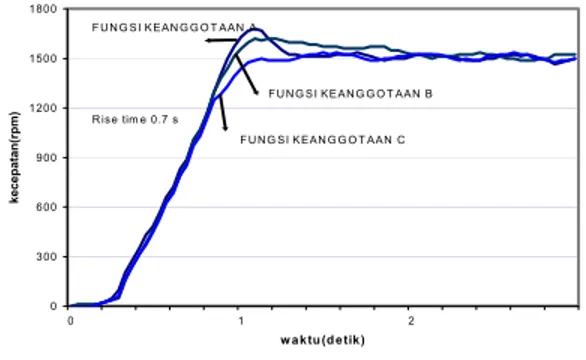
Dengan mengadakan pengendalian fuzi yang fungsi keanggotaan masukan seperti dalam gambar 4a, 4b dan 4c didapatkan hasil tanggapan kecepatan motor terhadap perubahan step set point dalam gambar 7.
Gambar 7. Tanggapan motor terhadap perubahan step.
Tanggapan step motor menunjukkan bahwa untuk keanggotaan ZE sempit menghasilkan tanggapan dengan overshoot, keanggotaan ZE sedang mengakibatkan overshoot berkurang dan keanggotaan ZE lebar mengakibatkan tanpa uvvershoot. Tanggapan ini akan jelas terlihat mempengaruhi kecepatan untuk kembali stabil setelah ada perubahan beban, yang ada di gambar 9
3. Tanggapan motorterkendali fuzi terhadap perubahan berbagai set point.
Gambar 8a. Tanggapan motor terhadap perubahan set point untuk keanggotaan himpunan ZE sempit gambar 4a.
Gambar 8b. Tanggapan motor terhadap perubahan set point untuk keanggotaan himpunan ZE sedang gambar 4b.
Gambar 8c. Tanggapan motor terhadap
perubahan set point untuk keanggotaan himpunan ZE lebar gambar 4c.
4. Pengaruh perubahan beban
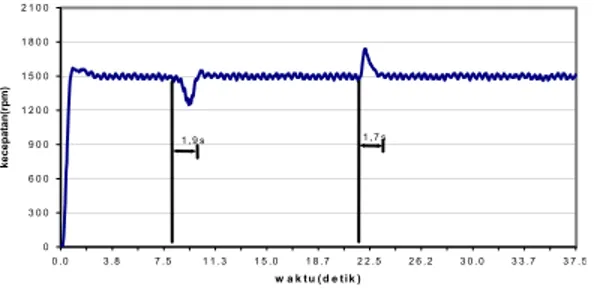
Berdasarkan fungsi keanggotaan seperti dalam gambar 4a, 4b, dan 4c dan diadakan perubahan beban, didapatkan tanggapan kecepatan motor masing-masing ditunjukkan dalam gambar 9a, 9b, dan 9c.
Gambar 9a. Tanggapan motor terhadap perubahan beban dengan fungsi keanggotaan ZE sempit seperti gambar 4a.
0 300 600 900 1200 1500 1800 0 1 2 w aktu (d etik) kecepatan(r pm) R ise tim e 0.7 s F U N G SI K EAN G G O T AAN A F U N G S I KE AN G G O T AAN B F U N G SI K EAN G G O T AAN C 0 3 0 0 6 0 0 9 0 0 1 2 0 0 1 5 0 0 1 8 0 0 2 1 0 0 0 .0 3 . 8 7 .5 1 1 .3 1 5 .0 1 8 . 7 2 2 .5 2 6 .2 3 0 .0 3 3 .7 3 7 . 5 w a k t u ( d e t ik ) kecepatan(rpm) 0 3 0 0 6 0 0 9 0 0 1 2 0 0 1 5 0 0 1 8 0 0 2 1 0 0 2 4 0 0 0 . 0 3 . 8 7 . 5 1 1 . 3 1 5 . 0 1 8 . 8 2 2 . 5 2 6 . 3 3 0 . 0 3 3 . 8 3 7 . 5 w a k t u ( d e t i k ) kecep at an (r p m ) 0 3 0 0 6 0 0 9 0 0 1 2 0 0 1 5 0 0 1 8 0 0 2 1 0 0 0 . 0 3 . 8 7 . 5 1 1 . 3 1 5 . 0 1 8 . 8 2 2 . 5 2 6 . 3 3 0 . 0 3 3 . 8 3 7 . 5 w a k t u ( d e t i k ) kecepatan(rpm ) P e m b e b a n a n B e b a n d i l e p a s 1 , 5 s 1 . 1 s 0 3 0 0 6 0 0 9 0 0 1 2 0 0 1 5 0 0 1 8 0 0 2 1 0 0 2 4 0 0 0 3 .7 5 7 .5 1 1 .2 5 1 5 1 8 .7 5 2 2 .5 2 6 .2 5 3 0 3 3 .7 5 3 7 .5 w ak tu (d e tik ) kecep atan (rp m )
Gambar 8b. Tanggapan motor terhadap perubahan beban dengan fungsi keanggotaan ZE sedang seperti gambar 4b.
Gambar 9c. Tanggapan motor terhadap perubahan beban dengan fungsi keanggotaan ZE lebar seperti gambar 4c.
Dari gambar 8 dapat dijelaskan bahwa funsi keanggotaan ZE yang lebih sempit menghasilkan tanggapan yang lebih cepat dan deviasi putaran yang kecil. Dalam gambar 8a, terjadi deviasi putaran sekitar 250 RPM selama 1,1 detik pada saat pemberian beban dan terjadi deviasi putaran sekitar 275 RPM selama 1,5 detik saat pelepasan beban. Dalam gambar 8c terjadi deviasi kecepatan sebesar 300 RPM dalam waktu 2 detit saat pembebanan, dan deviasi sebesar 300 RPM dalam waktu 2,2 detik saat pelepasan beban.
Kesimpulan
1. Sistem mikrokontroler 89C51 sangat fleksibel bila digunakan untuk perancangan sistem karena kemudahan dan kecepatan dalam modifikasi algoritma.
2. Aplikasi algoritma fuzi dalam mikrokontroler 8 bit ini untuk mengendalikan kecepatan motor DC sudah memadai.
3. Dalam penentuan sistem keanggotaan fuzi yang tepat diperlukan pengalaman terhadap sistem yang dikendalikan, karena satu sistem keanggotaan dapat menghasilakn tanggapan yang berbeda dengan bila digunakan sistem keanggotaa yang lain. 4. Masih diperlukan penelitian lanjut tentang
cara mencari fungsi keanggotaan fuzi yang secara otomatis dapat menyesuaikan dengan kondisi beban dan parameter motor sehingga pengendalian kecepatan dapat berlangsung secara optimal.
5. Masih perlu dilakukan pengembangan untuk pengendalian motor DC yang berdaya besar.