Sistem Kendali Jarak Tempuh Quadcopter Menggunakan Metode Proportional Integral Derivative
Teks penuh
Gambar
Dokumen terkait
Pada gambar 12 respon grafik pada jalan menanjak dengan sudut kemiringan 10 0 nilai parameter PID akan menurun untuk mencapai nilai respon yang sudah di set. Uji
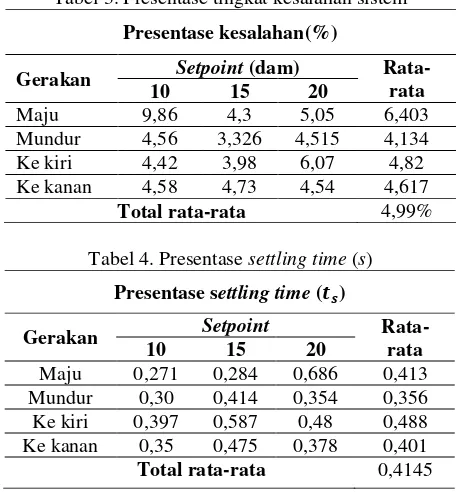
Setelah melihat hasil pengujian jarak tempuh four wheels mecanum robot yang menggunakan PID controller dan tanpa mengunakan PID controller kita dapat menganalisa bahwa ketepatan
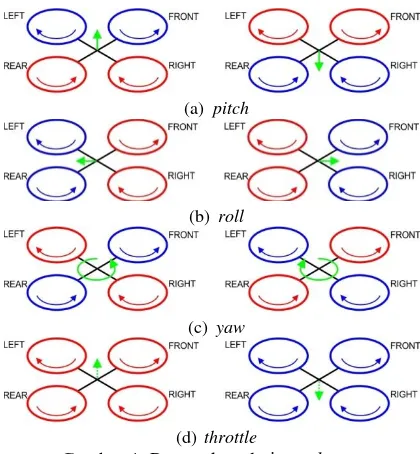
Pengujian ini bertujuan hanya untuk menguji bagaimana kendali attitude dari sistem saat state dari quadcopter adalah hovering , jika pada pengujian ini quadcopter
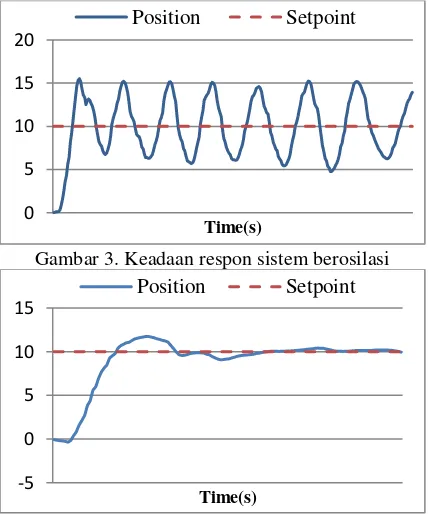
Pengujian pengontrol PID dengan memberikan sebuah gangguan dilakukan guna untuk mengetahui hasil data grafik dari performansi sistem PID pada simulasi pengujian
Pengujian ini bertujuan hanya untuk menguji bagaimana kendali attitude dari sistem saat state dari quadcopter adalah hovering, jika pada pengujian ini quadcopter dapat melakukan
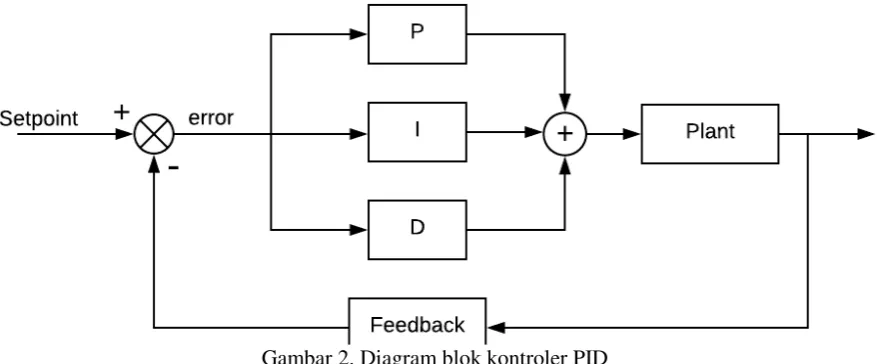
Kelebihan dari pemakaian kontroler PID di loop tertutup adalah kontrol PID memiliki kemampuan untuk penyetelan otomatis, dan dapat beradaptasi terhadap variasi waktu, sehingga sistem
Pada saat pengujian dengan mode buck menggunakan kendali PID didapatkan niali tegangan keluaran sebesar -11,850 Volt dengan nilai ripple tegangan sebesar 4,371 Volt dan tegangan
Kesimpulan Robot line follower pada penelitian ini diaplikasikan untuk memindahkan dan mengambil benda berdasarkan 6 jenis warna, dirancang menggunakan kendali PID dengan pencarian
