Rancang Bangun Model Quadcopter Dengan Control PID
(Proportional
Integral Derivative)
Sebagai Kendali Gerakan Hover Pada UAV
(Unmanned
Aerial Vehicle )
Quadcopter
Abdul Jabbar Lubis
Jurusan Teknik Informatika Sekolah Tinggi Teknik Harapan Medan Jl. HM Jhoni No 70 Medan, Indonesia
Abstract
Advances in technology and science, especially in the field of control engineering (engineering controls) have grown rapidly. These developments facilitate communication and electronic appliance control, especially controlling Quadcopter. As it grows, has now developed a robot control system to fly over long distances using radio frequency so it does not need to wear a lot of cable channels. Making flying robot aims to design a flying robot models that can be applied as a tool for surveillance. The system is controlled from a distance of about +/-200 to 500 meters and can be controlled using a remote.
Keywords: Quadcopter, radio frequency, remote
Abstrak
Kemajuan dalam bidang teknologi dan ilmu pengetahuan khususnya dalam bidang teknik kendali (teknik kontrol) telah berkembang dengan pesat. Perkembangan ini mempermudah komunikasi dan pengendalian alat elektronik khususnya pengontrolan Quadcopter. Seiring perkembangannya, saat ini telah berkembang sistem kendali robot terbang jarak jauh dengan menggunakan frekuensi radio sehingga tidak perlu memakai saluran kabel yang banyak. Pembuatan robot terbang ini bertujuan untuk merancang suatu model robot terbang yang dapat diaplikasikan sebagai alat bantu pengawasan. Sistem dikendalikan dari jarak sekitar +/- 200 hingga 500 meteran dan bisa dikendalikan dengan menggunakan remote.
Kata Kunci: Quadcopter, Frekuensi radio, remote
1. PENDAHULUAN
Quadcopter merupakan pesawat yang memiliki empat buah motor yang dikendalikan secara terpisah satu sama lainnya. Pada perkembangannya quadcopter dirancang untuk kendaraan udara tanpa awak (Unmanned Aerial Vehicle) yang dikendalikan jarak jauh oleh atau tanpa seorang pilot (autopilot). Pada fase penerbanganquadcopter, fase landing (pendaratan) merupakan fase paling kritis, dimana resiko terjadi kecelakaan paling besar. Permasalahan tersebut muncul karena adanya beberapa kendala, seperti kendala pada struktur rangka pesawat yang kecil, peningkatan beban pada sayap pesawat serta pengaruh beban angin sehingga menyebabkan pesawat tidak stabil. Pada saat proses landing referensi ketinggian terus berubah dari set point tertentu sampai set point bernilai nol (di dasar). Kondisi beban pada saat quadcopterberada diatas jelas akan berbeda dibandingkan pada saat quadcopter berada dibawah. Kondisi beban yang berubahubah akan menyebabkan parameter-parameter plant berubah. Perubahan beban tersebut menyebabkan adanya ketidakpastian parameter plant yang dapat menyebabkan perubahan spesifikasi respon yang cukup signifikan. Adanya permasalahan tersebut, dapat dikatakan sulit dalam perancangan kontroler yang didasarkan pada model
analitis. Kontroler sebelumnya yakni kontroler PID biasa tidak mampu mengatasi masalah diatas karena dinamika sistem yang bervariasi kecuali dengan cara dituning berkala. Oleh karena itu, dibutuhkan suatu kontroler yang robust dan dapat diandalkan untuk menyelesaikan permasalah diatas dan dipilihlah metode PID model reference adaptive control (PID-MRAC). Sistem pengendalian berbasis MRAC menawarkan beberapa kelebihan untuk mengatasi karakteristik plantnon-linearsalah satunyaquadcopter. MRAC merupakan salah satu skema adaptif dimana performansi keluaran sistem (proses) akan mengikuti performansi keluaran model referensinya. Parameter kontroler PID diskrit diatur (mekanisme pengaturan) berdasarkan pada perubahan parameter plant yang diestimasi dengan metodeLeast Square.
2. LANDASAN TEORI
2.1 Sekilas Tentang Aeromodelling
Miniatur pesawat udara ini terdiri atas 2 kategori yaitu pesawat udara aerodinamis dan pesawat udara aerostatis :
1. Pesawat Udara Aerodinamis
Pesawat udara aerodinamis merupakan pesawat udara yang lebih berat dari udara (Heavier Than Air). Pesawat udara aerodinamis terdiri dari 2 kelompok yaitu pesawat yang bermotor dan pesawat yang tidak bermotor.
Pesawat Udara Aerodinamis terdiri dari 2 kelompok yaitu pesawat bermotor dan tidak bermotor. Yang bermotor terdiri dari bersayap tetap (Fixed Wing) dan sayap putar (Rotary Wing) .Pesawat udara aerodinamis bermotor bersayap tetap terdiri dari pesawat terbang, kapal terbang dan amphibians. Yang bersayap putar terdiri dari Helicopter dan Gyrocopter. Pesawat udara aerodinamis tidak bermotor terdiri dari pesawat luncur (Glider), pesawat layang (Sailplane) dan layang-layang.
2. Pesawat Udara Aerostatis
Pesawat Udara Aerostatis merupakan pesawat udara yang lebih ringan dari pada udara (Lighter Than Air). Pesawat udara aerostatis terdiri dari kapal udara dan balon udara.
2.2 Sekilas Tentang Quadcopter
Quadcopter adalah jenis pesawat udara aerodinamis bermotor dan bersayap putar (rotary wing). Sebagaimana dengan namanya
Quad yang berarti empat, sehingga pada quadcopter memiliki 4 buah motor brushless dan 4 buah baling-baling (propeller).
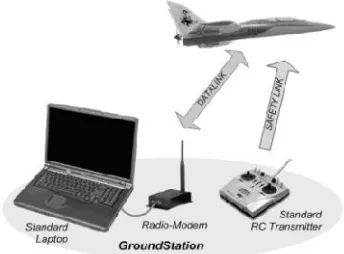
Berdasarkan bentuk rangka (frame), quadcopter terdiri dari 2 model yaitu model dengan frame berbentuk “plus” (+) dan model dengan frameberbentuk“silang”(x). dengan cara dikendalikan dari jarak jauh. UAV dapat berupa, pesawat atau helikopter yang menggunakan sistem navigasi mandiri. Pada dasarnya pesawat, atau helikopter dapat dipertimbangkan untuk menjadi kendaraan udara yang dapat melakukan misi yang berguna dan dapat dikendalikan dari jauh atau memiliki kemampuan terbang secara otomatis. [Unmanned Air Vehicle, 2007]
Gambar 2.1. Gambar Sistem UAV Secara Umum
Pesawat merupakan bagian terpenting dari UAV itu sendiri. Adapun bagian penyusun pesawat dapat dilihat pada gambar 2.8 dibawah ini :
Gambar 2.2Bagian-bagian dari UAV
Keterangan:
diverensial memiliki keunggulan untuk memperkecil delta error atau meredam overshot/undershot. PID berdasarkan implementasinya dibedakan menjadi analog dan digital. PID analog diimplementasikan dengan komponen elektronika resistor, capacitor, dan operational amplifier, sedangkan PID digital diimplementasikan dengan menggunakan program.
PID (Proportional–Integral–Derivative controller) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem. Komponen kontrol PID ini terdiri dari tiga jenis yaitu Proportional, Integratif dan Derivatif.Elemen-elemen kontroller P, I dan D bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar.
Gambar 2.3Blok diagram kontroler PID Analog
3. HASIL DAN PEMBAHASAN 3.1 Pengujian Sensor Sonar
Pembacaan dilakukan menggunakan komunikasi serial. Data Sonar di buffer kemudian dirubah dari dataASCII to integer.
Gambar 3.1 Error data sonar terhadap jarak Untuk data dibawah 6 inchi data yang terukur tidak stabil atau random. Sehingga dianggap error maksimum. Pada percobaan untuk data sonar dengan pembacaan serial didapatkan bahwa data sonar mulai dideteksi mulai jarak 7 inchi akan tetapi untuk jarak lebih dari 6 inchi persen eror bisa mencapai 0 persen. Untuk data
lebih dari tujuh dan kurang dari delapan, data sonar dideteksi 7 inchi. Jadi untuk perubahan data persetengah inchi secara aktual , data pada sonar yang terbaca tidak berubah dari data sebelumnya.
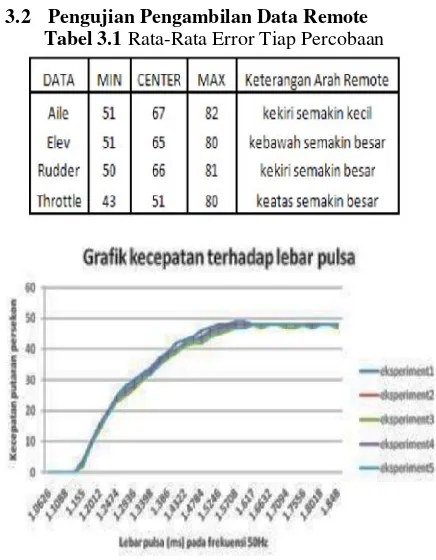
3.2 Pengujian Pengambilan Data Remote Tabel 3.1Rata-Rata Error Tiap Percobaan
Gambar 3.2Grafik karakteristik kecepatan UAV terhadap data
Throttle
Untuk pengambilan data kecepatan ini dilakukan 5 kali percobaan. Terjadi perubahan kecepatan ketika lebar data throttle mulai sebesar 1.157ms hingga mulai tidak mengalami perubahan ketika lebar pulsa mulai lebih dari 1.5ms. Dari data kecepatan terlihat maksimal kecepatan yang didapatkan 48 putaran per sekon(rps) bila dirubah dalam putaran permenit (rpm) sekitar 2880 rpm. Percobaan dilakukan didalam ruangan dan dimungkinkan terjadinya pengangkatan atau penyelamatan pada sistem sehingga tidak membahayakanMiniature Aerial Vehicle.
Pada data diatas,data tinggi diset pada ketinggian 35 inchi dan data stabil ketika ketinggian sesuai setpoint didapatkan sebesar 72 atau 1,667ms. Dari grafik range data setpoint sebesar 30% dari data setpoint. Range data ini diperlukan untuk mengetahui keberhasilan sistem ketika terbang untuk menjaga ketinggian jarak terhadap objek dibawahnya.
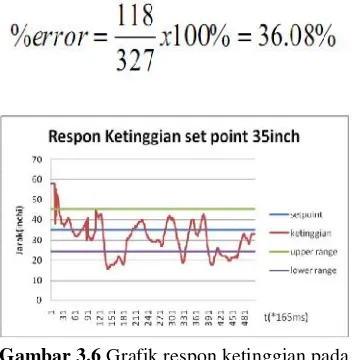
Didapatkan data out of range sebesar 34 dan jumlah sample dalam percobaan sebanyak 157 sehingga didapatkan persen error sebesar :
Gambar 3.4Grafik respon ketinggian pada Kp=1.5,Ki=0,Kd=0.
Data grafik respon error data sonar dengan setpoint 35 inchi dengan nilai data setpoint ketika terbang adalah 1.5ms didapatkan grafik cenderung dibawah nilai set point. Hal ini dikarenakan nilai gas set point penentuannya tidak tepat atau nilai gas ketika pada posisi set point kurang besar. Sehingga UAV ketika kondisi pada set point cenderung dibawah 35 inchi akibat daya angkat UAV kurang akibat pembebanan dan kecepatan rotor yang kurang.
Gambar 3.5Grafik respon ketinggian dengan throttle setpoint = 64
Dari Grafik ketika Kp=0,6 respon menuju setpoint melambat dibandingkan dengan Kp=1. Dilihat dari grafik frekuensi osilasi kp=0,6 relatif lebih kecil dari pada nilai kp=1. Daerah range setpoint sekitar 30% dari nilai setpoint. Jadi upper range sebesar 45,5 dan lower limit sebesar 24,5. Dari data pada grafik diatas didapatkan data out of range sebanyak 118 dari 327 banyaknya sample sehingga persen error yang terjadi pada percobaan ketika Kp=0,6 sebesar
Gambar 3.6Grafik respon ketinggian pada Kp=0.6, Kd=0.264
Dari grafik respon diatas didapatkan lebih sedikit adanya perubahan osilasi hanya untuk respon untuk mencapai setpoint relatif lambat atau lama dibanding sebelumnya. Faktor pembebanan pada UAV dan power baterai sangat berpengaruh dalam daya angkat untuk terbang menujusetpointyang diinginkan. Dari data gambar diatas bahwa range setpoint sekitar ±30 persen dari nilai setpoint Ketinggian setpoint sekitar 35inchi sehingga dari data tabel pada grafik diatas dapat diketahui bahwa dari 455 sample, data yang mengalami out of rangesebesar 118 data.
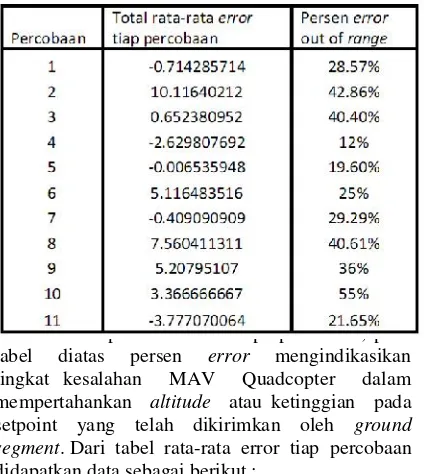
Tabel 3.2Rata-rata Error Tiap Percobaan
Dari tabel error rata-rata tiap percobaan diketahui nilai total error tiap percobaan terdapat tanda minus(-) ada juga yang plus(+). Untuk data persen error tiap percobaan, pada tabel diatas persen error mengindikasikan tingkat kesalahan MAV Quadcopter dalam mempertahankan altitude atau ketinggian pada setpoint yang telah dikirimkan oleh ground segment. Dari tabel rata-rata error tiap percobaan didapatkan data sebagai berikut :
Keterangan:
Q = total error rata-rata tiap percobaan x = jumlah percobaan
e = total persen error tiap percobaan
Sehingga didapatkan tabel seperti dibawah ini :
Tabel 3.3 Rata-Rata Error Percobaan
Dari hasil percobaan yang dilakukan rata-rata persenerroryang didapatkan sebesar 31,91%. Hal ini bisa dikatakan sistem berhasil menjaga ketinggian dalam percobaan sebesar 68,09%. Untuk total error sebesar 2,22577 inchi, hal ini berarti sistem MAV ketika terbang rata-rata dalam percobaan berada dibawah setpoint ketinggian dalam rangesetpointyang ditetapkan.
4. KESIMPULAN
Setelah melakukan tahap perancangan dan pembuatan sistem yang kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut :
1. Nilai Kp=1,5 mengakibatkan sistem osilasi dengan cepat. Perubahan kecepatan blade diaktifkan secara free running sistem stabil masih dijangkauan area setpoint, respon kontrol terhadap perubahan data sensor lebih cepat.
4. Untuk sensor ketinggian menggunakan sonar yang diuji coba memiliki keterbatasan jangkauan yang tidak bisa mendeteksi ketinggian dibawah 6 inchi. Selain itu ketinggian aktual dimungkinkan tidak sama dengan hasil pembacaan akibat kemiringan helikopter ketika bergerak.
5. Persen error pada MAV heli untuk menjaga ketinggian didapatkan sebesar 31,91% dengan range setpoint sebesar 30%. Sehingga didapatkan tingkat keberhasilan untuk menjaga ketinggian sebesar 68.09% Control for Arduino and Android, http://www.techbitar.com/ardudroid-simple-
bluetooth-control-forarduino-and-android.html, diakses tanggal 18 Januari 2015
[3] Carr, R., 2014, Servo,
http://www.fatlion.com/sailplanes/servos.html diakses pada 24 November 2014.
[4] Fauzi, M. K. A., 2014, Pemanfaatan Komunikasi Bluetooth Untuk Buka Tutup Gorden, Tugas Akhir, D3 Teknik Elektro, Sekolah Vokasi, UGM, Yogyakarta.
[5] Febriansyah, D., 2015, Alat Kendali Lampu Rumah Menggunakan Bluetotoh Berbasis Android. Jurnal, STMIK PalComTech, Palembang.
[6] Futurlec, 2015, Relays,
https://www.futurlec.com/Relays/JQC-3FF-12.shtml diakses tanggal 15 Januari 2015 [7] Ibrahim, M. M., 2013, Smart Home Berbasis
Mikrokontroller ATMega32, Tugas Akhir, STMIK MDP, Palembang.
[8] Pratama, F. N., 2010, Smart House Berbasis Mikrokontroller 89S51, Tugas Akhir, D3 Ilmu Komputer, Universitas Sebelas Maret, Surakarta.
Vokasi, Universitas Gadjah Mada, Yogyakarta.