Welcome to ePrints Sriwijaya University - UNSRI Online Institutional Repository
Teks penuh
Gambar

Dokumen terkait
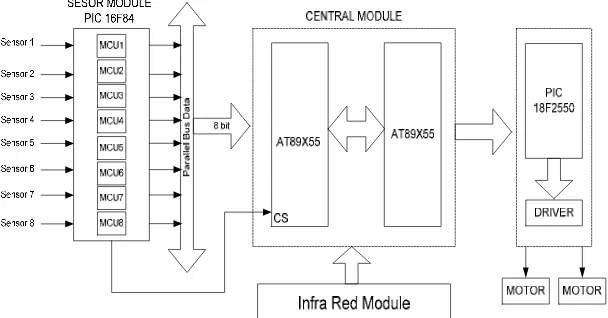
The controller, which based on sensor behavior and consist of three tasks obstacle avoidance, wall following, and emergency condition was designed using AT89X55
The other type of EAP, the non-regular program is meant that the EAP program that is intensively offered to those preparing studies overseas. The participants of this program.. At
If Darrieus and Savonius turbines are combined into one unit in which Savonius buckets are inserted within Darrieus rotor, the maximum torque becomes higher at low speed except
being shared fairly. The goal is that students are able to pass through the critical point that has been designed that is division with remainder. Furthermore, from these
After learning the video, the students’ post -test result showed that all students (100%) achieved the passing grade. This means that there was a significant increase of the
By using behavior based control strategy based on combination Fuzzy-PSO technique, the olfactory mobile robot should be able to localize source it self, measure local
Aspergillus sp1 (SbD3), Aspergillus sp2 (SbD5), Aspergillus sp3 (SbD6), and Penicillium sp (SbD4) of sambiloto ( Andographis paniculata ), obtained from stocks fungus stored
Perancangan sistem mekanik pada Aplikasi Gamepad Wireless Sebagai Pengendali pada Two Wheels Self Balancing Robot ini meliputi perancangan Dody keseluruhan dari robot
