2.1Hasil Penelitian Terdahulu
Penelitian yang dilakukan oleh Dwi Aryono (2012) Persoalan rem atau berhenti sebuah motor adalah sama pentingnya dengan persoalan jalan. Sebuah motor lisrik tidak akan dapat dipakai untuk misalnya keperluan traksi, bila motor itu tidak dapat dihentikan dengan baik. Ataupun untuk keperluan alat yang digunakan untuk mengangkat, seperti kran (crane) dan lift. Bila sebuah motor berputar, maka dapat dibayangkan bahwa rotor digerakkan dengan putaran noleh sebuah medan putar yang mempunyai kecepatan putar ns , yaitu putaran sinkron. Bilamana medan putar ini dihilangkan maka tidak ada lagi suatu daya dorong yang menggerakkan rotor, sehingga lambat laun rotor akan berhenti berputar. Proses berhenti atau proses rem ini akan dipercepat, bila misalnya dalam kumparan stator dialirkan arus searah. Arus searah ini akan menghasilkan suatu medan statis. Karena rotor berputar dalam medan statis itu, maka dalam rotor akan diinduksikan suatu gaya gerak listrik E, yang pada gilirannya akan mengalirkan arus induksi I. Baik E maupun I berbanding lurus dengan n. Kopel yang dihasilkan adalah sebanding dengan arus I dan fluksi Φ.
Penelitian yang dilakukan oleh Mahmoud M.Elkholy (2015) Pengereman motor induksi tiga fase merupakan masalah penting terutama dalam
aplikasi industri yang membutuhkan multi stop dalam waktu yang pasti.
Pengereman bisa mekanis melalui gesekan atau listrik. Mekanis pengereman
menghasilkan pemborosan energi kinetik yang disimpan rotor dan panas yang
berlebihan. Pengereman listrik sudah banyak metode seperti mencolokkan,
regeneratif dan pengereman dinamis. Memasukkan tergantung pada membalikkan
lawan yang menghentikan motor. Menghubungkan menghasilkan arus tinggi,
panas berlebih dan motor harus terputus ketika kecepatan mencapai nol jika tidak
akan berputar ke arah yang berlawanan. Jika kecepatan motor lebih besar dari
kecepatan sinkron, slip negatif. Dalam hal ini motor bertindak sebagai generator
yang mengembalikan energinya pasokan, ini disebut pengereman regeneratif.
Pengereman dinamis dicapai dengan memutuskan pasokan dan menghubungkan
resistansi eksternal melintasi terminal motor, dalam hal ini energi kinetik rotor
diubah menjadi panas kerugian. Metode pengereman lainnya juga dapat
digunakan seperti injeksi DC, urutan nol, magnet, dan kapasitor pengereman
eksitasi diri.
Raju Mahesh Karotiya (2015) Motor induksi telah digunakan di masa lalu terutama di aplikasi yang membutuhkan kecepatan konstan karena metode
konvensional kontrol kecepatan mereka miliki mahal atau sangat tidak efisien.
Kecepatan bervariasi aplikasi telah didominasi oleh drive dc. Ketersediaan dari
thyristor, power transistor, IGBT dan GTO telah diizinkan pengembangan drive
motor induksi kecepatan variabel. Kelemahan utama dari motor DC adalah
keberadaan komutator dan kuas, yang perlu sering perawatan dan membuatnya
tidak cocok untuk bahan peledak yang kotor lingkungan. di sisi lain, motor
induksi, khususnya tupai - kandang kasar, lebih murah, lebih ringan, lebih kecil,
lebih efisien, membutuhkan perawatan yang lebih rendah dan bisa beroperasi di
lingkungan yang kotor dan mudah meledak. Meskipun drive motor induksi
kecepatan variabel umumnya mahal daripada drive DC, mereka digunakan dalam
kelebihan motor induksi. Aplikasi dominan lainnya adalah underground dan
instalasi bawah air, dan eksplosif dan kotor lingkungan.
Rizana Fauzy (2015) Motor induksi memiliki lebih banyak manfaat dari
pada motor dc, karena memang begitu kuat dan relatif murah. Itu juga sebagian
besar digunakan untuk menyetir mobil secara elektrik kecepatan konstan, inersia
besar, dan tidak perlu perawatan rutin, di motor induksi di sisi lain memiliki
kelemahan dalam kontrol kecepatan yang rumit. Dan sekarang teknologi canggih
dalam listrik membuat komplikasi ini mudah melamar Sementara itu motor
induksi memiliki multi-variable nonlinear coupled struktur yang akselerasinya
sulit dikendalikan dan motor dc memiliki a struktur yang dipisahkan sehingga
akselerasi lebih mudah dikendalikan. Itu Pengendalian operasi driver motor ac
umumnya membutuhkan algoritma yang rumit diimplementasikan dalam proses
sinyal real time akurat. Dengan menggunakan uang muka teknologi elektronika
daya dan kontrol listrik, tugas untuk rumit kontrol dapat diimplementasikan.
Untuk melakukan pekerjaan ini, motor induksi dibuat linier dengan
mengoperasikan metode Kontrol Berorientasi Bidang Tidak Langsung. Dalam
pengembangan Kontrol Berorientasi Bidang Tidak Langsung, metode ini adalah
diketahui memiliki karakteristik yang mirip dengan induksi motor dc dimana
medan magnet arus dan arus jangkar adalah saling tegak. Dalam tulisan ini,
Fuzzy-Backstepping dirancang untuk mengontrol kecepatan penggerak motor
induksi. Makalah ini menyajikan pengontrol kombinasi dari fuzzy logic controller
dan Backstepping controller menjadi FuzzyBackstepping pada pengendali
menggunakan kontrol fuzzy, kesalahan sistem saat memulai pekerjaan dapat
terjadi diminimalkan. Penggunaan Backstepping akan membuat nilai kesalahan
kondisi tunak menjadi kecil dan menghasilkan kinerja output terbaik.
Penelitian yang dilakukan oleh Muhamad Hami Pradipta (2015) Dalam Pengereman dinamis metoda Capacitor self exitation, Pengereman diperoleh ketika sumber yang mencatu motor dilepas dan rotor masih bergerak karena terdapat momen inersia dari motor yang membuat motor tidak dapat berhenti seketika. Ketika rotor bergerak tanpa catu daya di stator, electrical magnetic force akan diinduksikan ke stator karena saat ini motor bekerja sebagai generator. Eksitasi diperoleh ketika saturasi magnetis membatasi electrical magnetic force yang diinduksikan ke stator, apabila kapasitor yang nilainya sesuai dihubungkan diantara dua terminal stator dan satu terminal stator dibiarkan terbuka, maka capacitor self xitation diperoleh dan akan membuat pengereman lebih cepat karena kapasitor akan menyimpan energi yang terbentuk dari rotor. Pengereman hanya dapat terjadi ketika rotor dalam keadaan bergerak, sedangkan ketika diam, pada motor tidak terdapat torsi pengereman.
2.2Landasan Teori
2.2.1 `Pengereman Dinamik
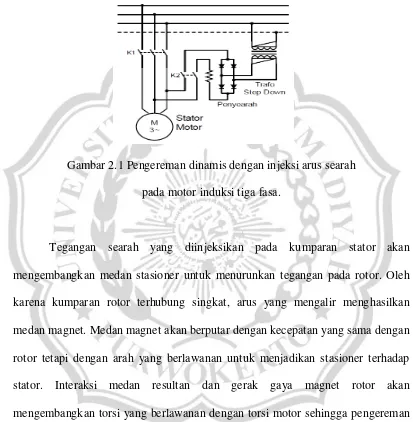
Gambar 2.1. menunjukkan bentuk rangkaian pengereman dengan injeksi arus searah pada motor induksi tiga fasa.
Gambar 2.1 Pengereman dinamis dengan injeksi arus searah pada motor induksi tiga fasa.
2.2.2 Penyearah Penuh Satu Fasa
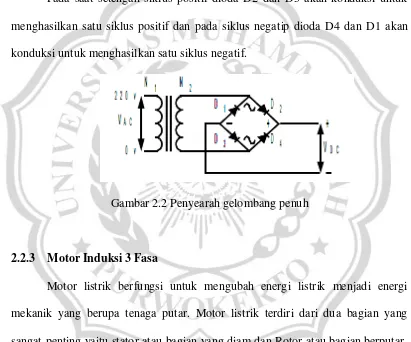
Penyearah yang dipakai pada alat ini adalah penyearah gelombang penuh dengan menggunakan transformator step down dan mempunyai keluaran tegangan DC positif. Rangkaian penyearah gelombang penuh dengan menggunakan transformator step down dapat dilihat pada Gambar 2.2.
Pada saat setengah siklus positif dioda D2 dan D3 akan konduksi untuk menghasilkan satu siklus positif dan pada siklus negatip dioda D4 dan D1 akan konduksi untuk menghasilkan satu siklus negatif.
Gambar 2.2 Penyearah gelombang penuh
2.2.3 Motor Induksi 3 Fasa
karekteristik kerja yang baik, motor induksi tiga fasa yang cocok dan paling banyak digunakan dalam bidang industri.
Penggunaan motor induksi yang banyak dipakai di kalangan industri mempunyai keuntungan sebagai berikut :
1. Bentuknya yang sederhana dan memiliki konstruksi yang kuat dan hampir tidak pernah mengalami kerusakan yang berarti.
2. Harga relatif murah dan dapat diandalkan.
3. Efisiensi tinggi pada keadaan berputar normal, tidak memerlukan sikat sehingga rugi – rugi daya yang diakibatkannya dari gesekan dapat dikurangi. 4. Perawatan waktu mulai beroperasi tidak memerlukan starting tambahan khusus
dan tidak harus sinkron
Namun disamping hal tersebut diatas, terdapat pula faktor – faktor kerugian yang tidak menguntungkan dari motor induksi yaitu sebagai berikut : 1. Pengaturan kecepatan dari motor induksi sangat mempengaruhi efesiensinya. 2. Kecepatan motor induksi akan menurun seiring dengan bertambahnya beban,
tidak seperti motor DC atau motor shunt.
3. Kopel awal mutunya rendah dibandingkan dengan motor DC shunt.
2.2.4
Berdasarkan Macam Arus1. Satu phasa
yang paling umum digunakan dalam peralatan rumah tangga, seperti kipas angin, mesin cuci dan pengering pakaian, dan untuk penggunaan hingga 3 sampai 4 Hp.
2. Tiga phasa
Medan magnet yang berputar dihasilkan oleh pasokan tiga phasa yang seimbang. Motor tersebut memiliki kemampuan daya yang tinggi, dapat memiliki kandang tupai atau gulungan rotor (walaupun 90% memiliki rotor kandang tupai); dan penyalaan sendiri. Diperkirakan bahwa sekitar 70% motor di industri menggunakan jenis ini, sebagai contoh, pompa, kompresor, belt conveyor, jaringan listrik , dan grinder.
2.2.5
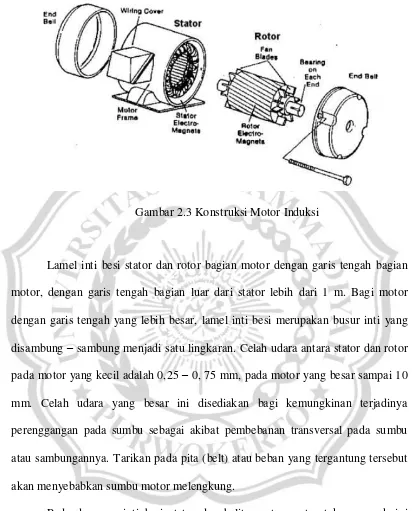
Konstruksi Motor InduksiGambar 2.3 Konstruksi Motor Induksi
Lamel inti besi stator dan rotor bagian motor dengan garis tengah bagian motor, dengan garis tengah bagian luar dari stator lebih dari 1 m. Bagi motor dengan garis tengah yang lebih besar, lamel inti besi merupakan busur inti yang disambung – sambung menjadi satu lingkaran. Celah udara antara stator dan rotor
pada motor yang kecil adalah 0,25 – 0, 75 mm, pada motor yang besar sampai 10 mm. Celah udara yang besar ini disediakan bagi kemungkinan terjadinya perenggangan pada sumbu sebagai akibat pembebanan transversal pada sumbu atau sambungannya. Tarikan pada pita (belt) atau beban yang tergantung tersebut akan menyebabkan sumbu motor melengkung.
A. Stator (bagian motor yang diam)
Pada bagian stator terdapat beberapa slot yang merupakan tempat kawat (konduktor) dari tiga kumparan yang masing – masing berbeda phasa dan menerima arus dari tiap phasa tersebut yang disebut kumparan stator. Stator terdiri dari plat – plat besi yang disusun sama besar dengan rotor dan pada bagian dalam
mempunyai banyak alur yang diberi kumparan kawat tembaga yang berisolasi. Jika kumparan stator mendapatkan suplai arus tiga fasa maka pada kumparan tersebut akan timbul flux magnit putar. Karena adanya flux magnit putar pada kumparan stator, mengakibatkan rotor berputar karena adanya induksi magnet dengan kecepatan putar rotor sinkon dengan kecepatan putar stator.
𝑛𝑠 =120.𝑓𝑃 …... (2.3)
Keterangan :
ns = Kecepatan sinkron (rpm) ƒ = Besarnya frekuensi (Hz)
P = Jumlah kutub
Konstruksi stator motor induksi sendiri terdiri atas beberapa bagian yaitu: 1. Bodi motor (gandar)
2. Inti kutub magnet dan lilitan penguat magnet 3. Slip ring
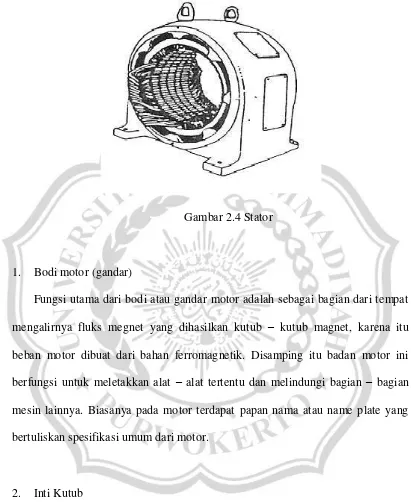
Gambar 2.4 Stator
1. Bodi motor (gandar)
Fungsi utama dari bodi atau gandar motor adalah sebagai bagian dari tempat mengalirnya fluks megnet yang dihasilkan kutub – kutub magnet, karena itu beban motor dibuat dari bahan ferromagnetik. Disamping itu badan motor ini berfungsi untuk meletakkan alat – alat tertentu dan melindungi bagian – bagian mesin lainnya. Biasanya pada motor terdapat papan nama atau name plate yang bertuliskan spesifikasi umum dari motor.
2. Inti Kutub
3. Sikat – Sikat Dan Pemegang Sikat.
Fungsi dari sikat adalah sebagai jembatan bagi aliran arus dari sumber dan biasanya terbuat dari bahan arang.
Dibawah ini menunjukkan kelompok - kelompok tingkatan sikat, antara lain : a. Sikat grafit alam
b. Sikat karbon keras c. Sikat elektrografit d. Sikat grafit logam e. Sikat karbon logam.
Sikat – Sikat akan aus selama operasi dan tingginya akan berkurang. Aus yang diizinkan ditentukan oleh konstruksi dari pemegang sikat ( gagang – sikat ). Bagian puncak dari sikat diberi pelat tembaga guna mendapatkan kontak yang baik antara sikat dan dinding pemegang sikat
B. Rotor (bagian motor yang bergerak)
Berdasarkan hukum faraday tentang imbas magnet, maka medan putar yang secara relatif merupakan medan magnet yang bergerak terhadap penghantar rotor akan mengibaskan gaya gerak listrik (ggl). Frekuensi ggl imbas ini sama dengan frekuensi jala – jala.
Besar ggl imbas ini berbanding lurus dengna kecepatan relatif antara medan putar dan penghantar rotor. Penghantar – penghantar dalam rotor yang membentuk suatu rangkaian tertutup, merupakan rangkaian melaju bagi arus rotor dan searah dengan hukum yang berlaku yaitu hukum lenz.
Arahnya melawan fluksi yang mengimbas, dalam hal ini arus rotor itu ditimbulkan karena adanya perbedaan kecepatan yang berada diantara fluksi atau medan putar stator dengan penghantar yang diam. Rotor akan berputar dalam arah yang sama dengan arah medan putar stator, untuk mengurangi beda kecepatan diatas. Jika rotor dibebani, maka putaran rotor akan turun sehingga terjadi perbedaan kecepatan putaran antara rotor dan stator, perbedaan kecepatan putaran ini disebut slip.
2.2.5 Kontaktor Magnet
Gambar 2.5 Kontaktor magnet 1. Prinsip kerja kontaktor
Sebuah kontaktor terdiri dari koil, beberapa kontak Normally Open ( NO ) dan beberapa Normally Close ( NC ). Pada saat satu kontaktor normal, NO akan membuka dan pada saat kontaktor bekerja, NO akan menutup. Sedangkan kontak NC sebaliknya yaitu ketika dalam keadaan normal kontak NC akan menutup dan dalam keadaan bekerja kontak NC akan membuka.
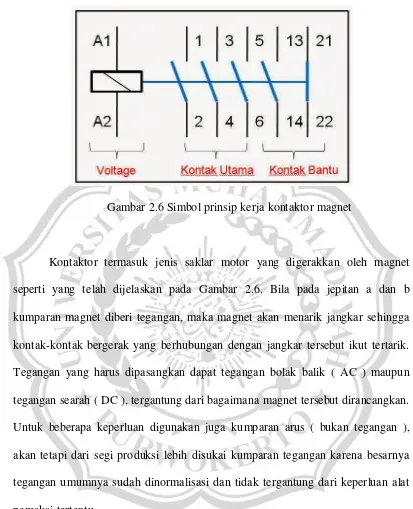
Gambar 2.6 Simbol prinsip kerja kontaktor magnet
Kontaktor termasuk jenis saklar motor yang digerakkan oleh magnet seperti yang telah dijelaskan pada Gambar 2.6. Bila pada jepitan a dan b kumparan magnet diberi tegangan, maka magnet akan menarik jangkar sehingga kontak-kontak bergerak yang berhubungan dengan jangkar tersebut ikut tertarik. Tegangan yang harus dipasangkan dapat tegangan bolak balik ( AC ) maupun tegangan searah ( DC ), tergantung dari bagaimana magnet tersebut dirancangkan. Untuk beberapa keperluan digunakan juga kumparan arus ( bukan tegangan ), akan tetapi dari segi produksi lebih disukai kumparan tegangan karena besarnya tegangan umumnya sudah dinormalisasi dan tidak tergantung dari keperluan alat pemakai tertentu.
2. Komponen penting pada kontaktor (Magnetic Contactor)
Komponen penting pada kontaktor magnet (Magnetic Contactor) yaitu:
b. kontak utama terdiri dari simbol angka : 1,2,3,4,5, dan 6.
c. kontak bantu biasanya tediri dari simbol angka 11,12,13,14, ataupun angka 21,22,23,24 dan juga angka depan seterusnya tetapi angka belakang tetap dari 1 sampai 4.
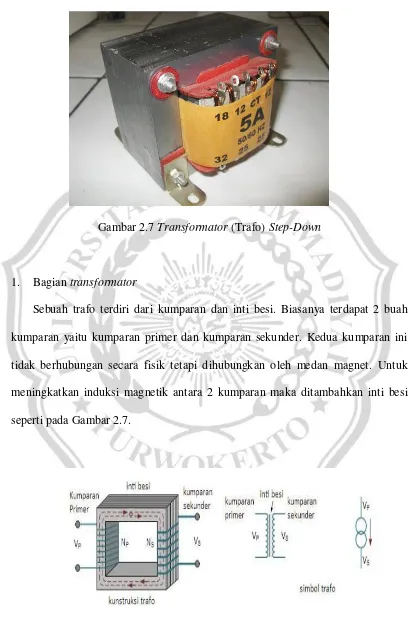
2.2.6 Transformator (Trafo) Step-Down
Transformator (Trafo) Step-Down merupakan suatu alat yang berhubungan dengan perangkat elektronik sebagai alat yang dapat menurunkan arus atau tegangan listrik. Transformator dengan nama lain trafo memiliki dua kumparan yang melilit sebuah inti besi yang berguna sebagai penguat medan magnet.
Gambar 2.7 Transformator (Trafo) Step-Down
1. Bagian transformator
Sebuah trafo terdiri dari kumparan dan inti besi. Biasanya terdapat 2 buah kumparan yaitu kumparan primer dan kumparan sekunder. Kedua kumparan ini tidak berhubungan secara fisik tetapi dihubungkan oleh medan magnet. Untuk meningkatkan induksi magnetik antara 2 kumparan maka ditambahkan inti besi seperti pada Gambar 2.7.
2. Prinsip kerja transformator Step-Down
Sebuah Transformator yang sederhana pada dasarnya terdiri dari 2 lilitan atau kumparan kawat yang terisolasi yaitu kumparan primer dan kumparan sekunder. Pada kebanyakan Transformator, kumparan kawat terisolasi ini dililitkan pada sebuah besi yang dinamakan dengan Inti Besi (Core). Ketika kumparan primer dialiri arus AC (bolak-balik) maka akan menimbulkan medan magnet atau fluks magnetik disekitarnya.
Kekuatan Medan magnet (densitas Fluks Magnet) tersebut dipengaruhi oleh besarnya arus listrik yang dialirinya. Semakin besar arus listriknya semakin besar pula medan magnetnya. Fluktuasi medan magnet yang terjadi di sekitar kumparan pertama (primer) akan menginduksi GGL (Gaya Gerak Listrik) dalam kumparan kedua (sekunder) dan akan terjadi pelimpahan daya dari kumparan primer ke kumparan sekunder.
Dengan demikian, terjadilah pengubahan taraf tegangan listrik baik dari tegangan rendah menjadi tegangan yang lebih tinggi maupun dari tegangan tinggi menjadi tegangan yang rendah.
2.2.7 Dioda
Dioda merupakan komponen semikonduktor yang paling sederhana. Mempunyai dua buah elektroda yaitu anoda dan katoda. Dioda adalah piranti elektronik yang hanya dapat melewatkan arus / tegangan dalam satu arah saja, dimana diode merupakan jenis vacuum tube yang memiliki dua buah elektroda (terminal). Karenaitu, diode dapat dimanfaatkan sebagai penyearah arus listrik, yaitu piranti elektronik yang mengubah arus atau tegan ganbolak-balik (AC) menjadi arus atau tegangan searah (DC).
Dioda terbentuk dari bahan semi konduktor tipe P dan N yang digabungkan. Dengan demikian diode sering disebut PN junction. Dioda adalah gabungan bahan semi konduktor tipe N yang merupakan bahan dengan kelebihan electron dan tipe P adalah kekurangan satu electron sehingga membentuk Hole.
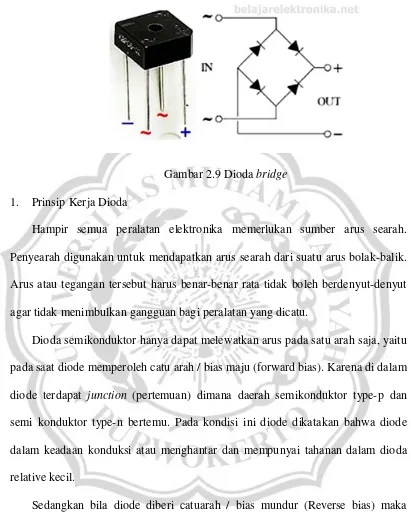
Gambar 2.9 Dioda bridge 1. Prinsip Kerja Dioda
Hampir semua peralatan elektronika memerlukan sumber arus searah. Penyearah digunakan untuk mendapatkan arus searah dari suatu arus bolak-balik. Arus atau tegangan tersebut harus benar-benar rata tidak boleh berdenyut-denyut agar tidak menimbulkan gangguan bagi peralatan yang dicatu.
Dioda semikonduktor hanya dapat melewatkan arus pada satu arah saja, yaitu pada saat diode memperoleh catu arah / bias maju (forward bias). Karena di dalam diode terdapat junction (pertemuan) dimana daerah semikonduktor type-p dan semi konduktor type-n bertemu. Pada kondisi ini diode dikatakan bahwa diode dalam keadaan konduksi atau menghantar dan mempunyai tahanan dalam dioda relative kecil.
Dari kondisi tersebut maka diode hanya digunakan pada beberapa pemakaian saja antara lain sebagai penyearah setengah gelombang (Half Wave Rectifier), penyearah gelombang penuh (Full Wave Rectifier), rangkaian pemotong (Clipper), rangkaian penjepit (Clamper) maupun pengganda tegangan (Voltage Multiplier).
2. Fungsi dioda
Fungsi Dioda sangat penting didalam rangkaian elektronika. Karena dioda adalah komponen semikonduktor yang terdiri dari penyambung P-N. Dioda merupakan gabungan dari dua kata elektroda, yaitu anoda dan katoda. Sifat lain dari dioda adalah menghantarkan arus pada tegangan maju dan menghambat arus pada aliran tegangan balik. masih banyak lagi fungsi diodalainnya, sebagai berikut :
a. Sebagai penyearah untuk komponen dioda bridge. b. Sebagai penstabil tegangan pada komponen dioda zener. c. Sebagai pengaman atau sekering.
h. Dapat digunakan sebagai sensor panas pada aplikasi rangkaian power
amplifier.
i. Sebagai sensor cahaya pada komponen dioda photo.
j. Sebagai rangkaian VCO (Voltage Controlled Oscilator) pada komponen dioda varactor.
2.2.8 Push Button
Push Button merupakan saklar tekan yang berfungsi sebagai pemutus atau penyambung arus listrik dari sumber arus ke beban listrik. Suatu sistem saklar tekan push button terdiri dari saklar tekan start, stop reset dan saklar tekan untuk emergency. Push button memiliki kontak NC (normally close) dan NO (normally open). Push button dibedakan menjadi beberapa tipe, yaitu:
1. Tipe Normally Open (NO)
Tombol ini disebut juga dengan tombol start karena kontak akan menutup bila ditekan dan kembali terbuka bila dilepaskan. Bila tombol ditekan maka kontak bergerak akan menyentuh kontak tetap sehingga arus listrik akan mengalir.
2. Tipe Normally Close (NC)
Tombol ini disebut juga dengan tombol stop karena kontak akan membuka bila ditekan dan kembali tertutup bila dilepaskan. Kontak bergerak akan lepas dari kontak tetap sehingga arus listrik akan terputus.
3. Tipe NC dan NO
ditekan maka kontak tertutup akan membuka dan kontak yang membuka akan tertutup
Gambar 2.10 Push button
Prinsip kerja push button apabila dalam keadaan normal tidak ditekan maka kontak tidak berubah, apabila ditekan maka kontak NC akan berfungsi sebagai stop (memberhentikan) dan kontak NO akan berfungsi sebagai start (menjalankan) biasanya digunakan pada sistem pengontrolan motor – motor induksi untuk menjalankan mematikan motor pada industri – industri.
2.2.9 MCB (Miniature Circuit Breaker)
MCB adalah sebuah perangkat elektromekanikal yang dapat melindungi rangkaian listrik dari arus yang berlebihan dengan cara memutuskan arus tersebut secara otomatis saat melewati batas tertentu. Akan tetapi pada saat kondisi normal, MCB memiliki fungsi sebagai saklar yang dapat menghubungkan dan memutuskan aliran arus listrik secara manual. MCB sendiri terdiri dari MCB 1 Phasa, 2 phasa dan 3 phasa.
Gambar 2.11 MCB 1, 2 dan 3 fasa
2.2.10 Rotari Switch
Gambar 2.12 Rottari switch
2.2.11 Timer Autonics at8n
Timer analog adalah sebuah komponen listrik penghitung waktu. Ketika
waktu yang telah ditentukan tercapai, maka output kontaknya akan bekerja.
Output kontak timer biasanya berupa kontak NO (Normally Open) dan NC
(Normally Close). Sinyal timer didapat dari supplai arus listrik pada koil timer
yang akan membuat Timer ON. Respon terhadap sinyal tersebut, dapat diatur
sesuai dengan fungsi Timer itu sendiri.
Sedangkan timer analog AT8N sendiri merupakan jenis soket 8PIN,dengan
jenis panggilan Analog untuk pengaplikasian yang sangat mudah. Input tegangan
yang digunakan yaitu dari 100Volt - 240Volt AC atau 24Volt - 240 Volt DC yang
Spesifikasi dari at8n ini sebagai berikut
1. menggunakan tegangan AC/ DC 24v-240v
2. terdapat 6 jenis mode operasi Output
3. waktu kontrol 0,05 detik untuk 100 jam
4. indikator ditunjukkan dengan LED
Indikator dari timer at8n
Ada beberapa item indikator pada bagian timer yang perlu diketahui, yaitu :
1. Power : indikator bahwa supply tegangan sudah masuk
2. Out : indikator bahwa output timer kerja ( waktu actual = Set )
3. 0-5 : Scala timer ( time range selector )
4. Sec : Satuan timer dalam second / detik.
5. Jarum merah : indikator set, dirubah dengan cara diputar
Gambar 2.14 Timer autonics
Cara Kerja
pada saat timer mendapat suplay tegangan, timer akan mulai menghitung sesuai
waktu yang sudah diatur. apabila timer sudah selesai menghitung , maka kontak