IMPLEMENTASI MIKROKONTROLER ATMEGA 8535 PADA PANEL SURYA STATIS DAN PANEL SURYA DINAMIS BERDASARKAN
WAKTU MENGGUNAKAN REAL TIME CLOCK (RTC) DS1307
SKRIPSI
MUHAMMAD SYAHRIAL 121421076
PROGRAM EKSTENSI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
IMPLEMENTASI MIKROKONTROLER ATMEGA 8535 PADA PANEL SURYA
STATIS DAN PANEL SURYA DINAMIS BERDASARKAN WAKTU
MENGGUNAKAN REAL TIME CLOCK (RTC) DS1307
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah
Sarjana Ilmu Komputer
MUHAMMAD SYAHRIAL
121421076
PROGRAM EKSTENSI S1 ILMU KOMPUTER
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : IMPLEMENTASI MIKROKONTROLER ATMEGA
8535 PADA PANEL SURYA STATIS DAN PANEL
SURYA DINAMIS BERDASARKAN WAKTU
MENGGUNAKAN REAL TIME CLOCK (RTC) DS1307
Kategori : SKRIPSI
Nama : MUHAMMAD SYAHRIAL
Nomor Induk Mahasiswa : 121421076
Program Studi : EKSTENSI S1 ILMU KOMPUTER
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
Komisi Pembimbing :
Pembimbing I Pembimbing II
Dr. Poltak Sihombing, M.Kom Dr. Drs. Bisman Perangin-angin M.Eng.Sc
NIP. 19620217 199103 1 001 NIP: 19560918 198503 1 002
Diketahui/disetujui oleh
Program Studi Ekstensi S1 Ilmu Komputer
Ketua,
Dr. Poltak Sihombing, M.Kom
iii
PERNYATAAN
IMPLEMENTASI MIKROKONTROLER ATMEGA 8535 PADA PANEL SURYA
STATIS DAN PANEL SURYA DINAMIS BERDASARKAN WAKTU
MENGGUNAKAN REAL TIME CLOCK (RTC) DS1307
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Agustus 2015
MUHAMMAD SYAHRIAL
PENGHARGAAN
Segala puji dan syukur penulis ucapkan kehadirat Allah SWT yang telah memberikan
rahmat dan hidayah-Nya kepada penulis sehingga dapat menyelesaikan skripsi ini
tepat waktu sesuai dengan instruksi dan peraturan yang berlaku di Fakultas Ilmu
Komputer dan Teknologi Informasi serta shalawat dan salam penulis hadiahkan
kepada Nabi Besar Muhammad SAW.
Dalam penyusunan dan penulisan skripsi ini, penulis banyak mendapat
bantuan, dukungan, dan bimbingan dari berbagai pihak. Pada kesempatan ini penulis
ingin mengucapkan rasa terima kasih dan penghargaan kepada :
1. Bapak Prof. Drs. Subhilhar, M.A., Ph.D selaku Plt Rektor Universitas Sumatera
Utara.
2. Bapak Prof. Dr. Muhammad Zarlis, M.Sc sebagai Dekan Fakultas Ilmu Komputer
dan Teknologi Informasi.
3. Bapak Dr. Poltak Sihombing, M.Kom sebagai Ketua Program Studi S1 Ilmu
Komputer.
4. Ibu Maya Silvi Lydia, B.Sc, M.Sc selaku Sekretaris Program Studi Ilmu
Komputer.
5. BapakDr. Poltak Sihombing, M.Kom selaku Dosen Pembimbing I dan Bapak Dr.
Drs. Bisman Perangin-angin M.Eng.Sc selaku Dosen Pembimbing II yang telah
meluangkan waktu, tenaga, dan pikiran dalam membimbing, mengarahkan,
menasehati, memotivasi, dan menyemangati penulis agar dapat menyelesaikan
skripsi ini.
6. Ibu Maya Silvi Lydia, B.Sc, M.Sc selaku dosen Pembanding I dan Bapak Ade
Candra, ST, M.Kom selaku dosen Pembanding II yang telah memberikan kritik
dan saran terhadap skripsi penulis.
7. Seluruh staf pengajar dan pegawai Fakultas Ilmu Komputer dan Teknologi
Informasi.
8. Teristimewa orang tua yang penulis sayangi, ibunda Khadijah dan ayahanda
Syarif Effendi Musa yang tidak henti-hentinya memberikan doa, motivasi, dan
v
9. Abang dan Adik tersayang Zulham Effendi, Ade Syafrizal, Muhammad fauzi dan
Abdullah yang selalu memotivasi penulis dalam menyelesaikan skripsi ini.
10. Sahabat-sahabat luar biasa Oki Handinata, Hafiz Akbar, Annisari Afni Saragih,
Rizky Ananda Siregar, Novri Sultanti, Reza Mahardi, Arief Moenandar,
Muhammad Ridho Ilahi yang selalu menemani dan memberi motivasi kepada
penulis.
11. Teman – teman seperjuangan mahasiswa S1 Ekstensi Ilmu Komputer stambuk
2012 yang selalu memberi dukungan.
12. Semua pihak yang terlibat langsung ataupun tidak langsung yang tidak dapat
penulis ucapkan satu per satu yang telah membantu menyelesaikan skripsi ini.
Penulis menyadari bahwa skripsi ini masih memiliki banyak kekurangan, baik
dari segi teknik, tata penyajian ataupun dari segi tata bahasa. Oleh karena itu
penulis bersedia menerima kritik dan saran dari pembaca dalam upaya perbaikan
skripsi ini. Semoga skripsi ini dapat bermanfaat bagi penulis dan pembaca,
khususnya rekan-rekan mahasiswa lainnya yang mengikuti perkuliahan di
Universitas Sumatera Utara.
Medan, Agustus 2015
Penulis
ABSTRAK
Peningkatan populasi manusia menuntut pembaharuan sumber daya alam untuk memenuhi berbagai kebutuhan. Misalnya, kebutuhan energi listrik yang sangat mempengaruhi perkembangan dan teknologi dari suatu wilayah. Energi listrik merupakan salah satu bagian vital yang harus selalu ada. Untuk itu diperlukan sumber energi listrik baru yang dapat menggantikan sumber energi listrik yang telah ada. Penelitian ini bertujuan untuk membuat simulasi alat pembangkit listrik tenaga surya yang disebut solar sel. Simulasi ini menghasilkan energi listrik yang dapat digunakan dalam kehidupan sehari-hari. Namun seiring perkembangannya terdapat dua jenis solar sel, yakni statis dan dinamis dimana solar sel statis dalam keadaan diam sedangkan solar sel dinamis bergerak mengikuti arah pergerakan sinar matahari. Untuk mengetahui tingkat efisiensi tegangan dan arus pada masing-masing jenis solar sel maka dibuatlah simulasi kedua jenis solar sel tersebut.
vii
IMPLEMENTATION OF A MICROCONTROLLER ATMEGA 8535 ON STATIC AND DYNAMIC SOLAR PANEL BASED ON TIME USING REAL
TIME CLOCK (RTC) DS1307
ABSTRACT
The increase in human population are demanding the renewal of natural resources to meet various needs. For example, the needs of electrical energy that greatly influences the development and technology of a some region. Electrical energy is one of the vital part that should be always exist. For that is needed a new electric energy source that can be replace the source of electrical energy before. This research aims to make a simulation tools of solar power plant or called solar cells. This simulation resulted of the electrical energy that can be used in everyday life. However as the development of solar cells have two types. Namely, static and dynamic where the static solar cells in a state of silent while the dynamic solar cell moves to follow the direction movement of the sun. To show the level of efficiency from voltage and current on each type of solar cell, then made a simulation from the both types of the solar cells.
DAFTAR ISI
1.3Ruang Lingkup Penelitian 3
1.4Tujuan Penelitian 4
1.5Manfaat Penelitian 4
1.6Metode Penelitian 4
1.7Sistematika Penulisan 5
Bab 2 Landasan Teori
2.1Photovolatic Cell 6
2.2Pergerakan Matahari 7
2.3Perangkat Keras 8
2.3.1 Sensor Arus ACS712 8
2.3.2 Mikrokontroler ATMega8535 9
2.3.3 Bagian Sumber Tegangan 12
2.3.4 Bagian ISP Programmer 12
2.3.5 Bagian Output ke LCD 13
2.3.6 Bagian Real Time Clock (RTC) DS1307 16
2.3.7 Perancangan Sensor Arus 17
2.3.8 Rangkaian Driver MotorServo MG996R 19
2.3.9 Rangkaian RS 232 21
2.4Perangkat Lunak 21
2.4.1 CodeVisionAVR 21
2.5Penelitian Pembahasan Solar Tracker 23
Bab 3 Analisis dan Perancangan Sistem
3.1Analisis Masalah 25
3.2Analisis Kebutuhan Sistem 26
3.3Pemodelan Sistem 28
3.4Perancangan Sistem 29
3.4.1 Antarmuka Mikrokontroler ATMega8535 30
ix
Bab 4 Implementasi dan Pengujian Sistem
4.1Implementasi 34
4.1.1 Persiapan Alat dan Bahan 35
4.1.2 Implementasi Sistem Menggunakan Papan PCB 37 4.1.3 Implementasi Perangkat Lunak untuk Sistem 39
4.2Pengujian Sistem 41
4.2.1 Pengujian Sensor Arus 43
4.2.2 Pengujian rangkaian RTC DS-1307 44
4.2.3 Interfacing LCD 2x16 45
4.2.4 Pengujian Rangkaian Motor Servo 46
4.2.5 Pengujian System Secara Keseleruhan 47
Bab 5 Kesimpulan dan Saran
5.1Kesimpulan 57
5.2Saran 57
Daftar Pustaka
DAFTAR TABEL
Hal.
2.1 Perbandingan Antara Jenis-Jenis Sel Surya 7
2.2 Fungsi pin LCD Character 2x16 14
3.1 Keterangan Bagian-Bagian Rancangan sistem 28
4.1 Daftar Komponen Yang Diperlukan Untuk Implementasi Sistem 35
4.2 Data Pengujian Sensor Arus ACS712 43
xi
2.8 Antarmuka Bagian RTC DS1307 17
2.9 Rangkaian Aplikasi Sensor Arus ACS 712 ,5 Ampere 18 2.10 Konfigurasi Pin LM321 Dan Rangkaian Inverting Amplifier 18
2.11 Motor Servo 1800 19
2.12 Gambar Rangkaian Motor Servo 20
2.13 MAX232 Dalam Rangkaian 21
3.1 Diagram Ishikawa untuk analisis masalah 26 3.2 Diagram Blok Pemodelan System Yang Dirancang 28 3.3 Antarmuka Mikrokontroler Dengan Komponen-komponen Lainnya 31 3.4 Flowchart Kerja Sistem Secara Keseluruhan 33
4.1 Rangkaian mikrokontroler ATMega 8535 37
4.2 Rangkaian sensor arus ACS 712 38
4.3 Rangkaian motor servo dan panel surya dinamis 38
4.4 Rangkaian LCD 2x16 39
4.5 CodeVisionAVR 39
4.6 Interface CodeVisionAVR 3.12 40
4.7 ProgISP 17.2 41
4.8 Rangkaian Pengujian Mikrokontroler 42
4.9 Pergerakan Motor Servo 46
ABSTRAK
Peningkatan populasi manusia menuntut pembaharuan sumber daya alam untuk memenuhi berbagai kebutuhan. Misalnya, kebutuhan energi listrik yang sangat mempengaruhi perkembangan dan teknologi dari suatu wilayah. Energi listrik merupakan salah satu bagian vital yang harus selalu ada. Untuk itu diperlukan sumber energi listrik baru yang dapat menggantikan sumber energi listrik yang telah ada. Penelitian ini bertujuan untuk membuat simulasi alat pembangkit listrik tenaga surya yang disebut solar sel. Simulasi ini menghasilkan energi listrik yang dapat digunakan dalam kehidupan sehari-hari. Namun seiring perkembangannya terdapat dua jenis solar sel, yakni statis dan dinamis dimana solar sel statis dalam keadaan diam sedangkan solar sel dinamis bergerak mengikuti arah pergerakan sinar matahari. Untuk mengetahui tingkat efisiensi tegangan dan arus pada masing-masing jenis solar sel maka dibuatlah simulasi kedua jenis solar sel tersebut.
vii
IMPLEMENTATION OF A MICROCONTROLLER ATMEGA 8535 ON STATIC AND DYNAMIC SOLAR PANEL BASED ON TIME USING REAL
TIME CLOCK (RTC) DS1307
ABSTRACT
The increase in human population are demanding the renewal of natural resources to meet various needs. For example, the needs of electrical energy that greatly influences the development and technology of a some region. Electrical energy is one of the vital part that should be always exist. For that is needed a new electric energy source that can be replace the source of electrical energy before. This research aims to make a simulation tools of solar power plant or called solar cells. This simulation resulted of the electrical energy that can be used in everyday life. However as the development of solar cells have two types. Namely, static and dynamic where the static solar cells in a state of silent while the dynamic solar cell moves to follow the direction movement of the sun. To show the level of efficiency from voltage and current on each type of solar cell, then made a simulation from the both types of the solar cells.
BAB 1
PENDAHULUAN
Pada bab ini akan menjelaskan mengenai latar belakang pemilihan judul skripsi
“Implementasi mikrokontroler atmega 8535 pada panel surya statis dan panel surya dinamis berdasarkan waktu menggunakan Real Time Clock (RTC) DS1307”, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metodologi
penelitian, dan sistematika penulisan.
1.1.Latar Belakang
Perkembangan populasi manusia di dunia mengakibatkan meningkatnya kebutuhan
yang harus disediakan oleh pemerintah. Misalnya yang paling vital yakni kebutuhan
listrik dimana lebih dari separuh pekerjaan dan kebutuhan sehari-hari memerlukan
listrik. Untuk itu pemerintah harus terus berinovasi dalam mengembangkan
pembangkit listrik. Umumnya energi listrik yang diperoleh berasal dari bantuan air
atau angin. Sebenarnya ada sumber energi lain yang dapat digunakan, yaitu
menggunakan energi cahaya matahari (Solar Energy).
Energi matahari dapat dimanfaatkan dengan cara merangkai suatu alat yang
dapat digunakan untuk mengubah energi matahari menjadi energi listrik. Alat yang
dapat digunakan adalah solar sel. Teknologi dengan menggunakan solar sel telah lama
dikenal oleh manusia. Solar sel dengan kemajuan teknologi menjadi sangat umum
sekarang ini. Beberapa pendapat tentang solar sel menurut beberapa peneliti , yakni:
1. Solar sel adalah alat yang mengubah sinar matahari langsung menjadi listrik
dan keuntungannya adalah sinar matahari dapat diperoleh setiap hari secara
2
2. Solar sel merupakan energi terbarukan yang menawarkan banyak keuntungan
seperti tanpa memerlukan bahan bakar minyak, tidak menghasilkan polusi dan
biaya perawatan rendah serta tidak menghasilkan noise (Surojo et. al, 2010). 3. Semakin besar intensitas cahaya matahari yang ditangkap oleh solar cell,
semakin besar daya listrik yang dihasilkan (Zulfi, 2010).
4. Dengan posisi panel menghadap ke atas dan jika dianggap benda yang
mempunyai permukaan rata maka panel akan mendapat radiasi matahari
maksimum pada saat matahari tegak lurus dengan bidang panel. Pada saat arah
matahari tidak tegak lurus dengan bidang panel atau membentuk sudut Ө maka
panel akan menerima radiasi lebih kecil dengan faktor cos Ө (Yuwono, 2005).
Pada umumnya, solar sel merupakan sebuah hamparan semikonduktor yang dapat menyerap photon dari sinar matahari dan mengubahnya menjadi listrik. Setiap jenis
semikonduktor yang berbeda hanya dapat menyerap photons pada tingkat energi
tertentu saja yang dikenal dengan istilah bandgap. Solar tracker adalah suatu perangkat yang digunakan untuk mendeteksi cahaya matahari. Implementasi solar sel
saat ini terdiri dari dua jenis, yaitu solar sel statis dan dinamis. Solar sel statis dibuat
dengan cara meletakan solar sel membentuk setengah lingkaran atau dengan membuat
wadah besar yg mengarah ke langit. Sedangkan solar sel dinamis atau sering juga
disebut sebagai solar sel otomatis, dimana wadah solar sel mengikuti arah pergerakan
cahaya matahari atau yang mewakilinya.
Menurut Maulana (2011) agar panel surya menangkap cahaya matahari lebih
maksimal maka bisa dilakukan dengan mengkombinasikan solar tracker untuk
mendeteksi cahaya matahari kemudian menggerakkan panel surya untuk mengikuti
arah pergerakan matahari. kombinasi ini disebut sistem panel surya otomatis (SPSO).
Sedangkan menurut Rif’an (2012) untuk mendapatkan energi paling besar akan
dihasilkan jika sudut deviasi solar tracker sebesar 5 derajat. Untuk mengetahui perbedaanantara solar sel statis dan dinamis maka dibuatlah suatu perancangan solar
sel untuk membandingkan dan menganalisa hasil yang didapat dari kedua solar sel
tersebut.
Informasi solar sel sudah cukup banyak dijumpai dalam beberapa artikel namun
ini untuk mengetahui perbedaan antara solar sel statis dengan dinamis yaitu dengan
membandingkan antara satu artikel mengenai solar sel statis dan artikel lainnya
mengenai solar sel dinamis. Hal ini dapat menyebabkan hasil yg berbeda dikarenakan
hasilnya dipengaruhi oleh waktu, tempat dan kondisi cuaca yang berbeda.
Namun hal itu akan dipermudah dengan dibangunnya sebuah sistem solar sel
dengan konsep yang kompleks yang dipengaruhi oleh kondisi yang sama sehingga
hasilnya akurat sebagai bahan perbandingan yaitu sebuah simulasi solar sel statis dan
dinamis dalam satu wadah menggunakan mikrokontroler atmega 8535.
1.2.Rumusan Masalah
Dari uraian latar belakang tersebut yang menjadi rumusan masalah pada penelitian ini
adalah bagaimana mengimplementasikan mikrokontroler atmega 8535 pada solar sel
statis dan dinamis serta mengetahui hasil keluaran yang diperoleh dari masing-masing
alat tersebut. Dipilihnya sistem mikrokontroler ini karena sistem mikrokontroler
merupakan sistem yang handal, membutuhkan biaya yang murah dan bisa dirancang
untuk alat yang portable.
1.3.Ruang Lingkup Penelitian
Adapun batasan masalah dalam penelitian ini adalah :
1. Menggunakan mikrokontroler atmega 8535.
2. Solar sel dinamis tidak menggunakan sensor pendeteksi cahaya melainkan
menggunakan timer.
3. Penentuan arah mata angin (timur dan barat) sudah diketahui.
4. Sistem solar sel yang dibuat merupakan simulator yang terdiri dari : a. Rangkaian solar sel
b. Display arus, tegangan dan sudut perputaran servo berbasis LCD dan
dekstop.
4
1.4.Tujuan Penelitian
Tujuan dari penelitian ini adalah membuat solar sel statis dan solar sel dinamis dengan
bantuan mikrokontroler atmega 8535 serta membandingkan arus dan tegangan yang
dihasilkan oleh kedua perangkat tersebut.
1.5.Manfaat Penelitian
Penelitian ini diharapkan dapat memberikan informasi bahwa mikrokontroler atmega
8535 dapat digunakan untuk membuat solar sel statis dan dinamis serta memberikan
informasi besarnya perbedaan arus dan tegangan yang dihasilkan.
1.6.Metode Penelitian
Metode penelitian yang digunakan dalam penulisan tugas akhir ini adalah sebagai
berikut:
1. Studi Literatur
Penulis melakukan studi kepustakaan melalui penelitian berupa buku, jurnal
maupun artikel-artikel yang relevan mengenai Solar Tracker. 2. Analisis dan Perancangan
Perancangan sistem dimulai dengan tahap mengindentifikasikan masalah,
memahami kerja sistem yang akan dibuat, merancang dan membuat laporan
tentang hasil analisis, dan Perancangan yang dimaksud adalah dengan
membuat interface sistem dan menggambarkan sistem dengan menggunakan flowchart dan UML .
3. Implementasi
Metode ini dilaksanakan dengan mengimplementasikan rancangan sistem
yang telah dibuat pada impelementasi sistem menggunakan bahasa
pemrograman C.
4. Pengujian
Metode ini dilaksanakan dengan melakukan pengujian terhadap sistem yang
5. Dokumentasi
Setelah seluruh metode sudah dilakukan dengan sempurna, maka selanjutnya
metode dokumentasi dilakukan, dengan cara membuat laporan hasil analisa
kedalam format penulisan tugas akhir yang disertai dengan adanya
kesimpulan.
1.7.Sistematika Penulisan
Adapun langkah-langkah dalam menyelesaikan penelitian ini adalah sebagai berikut :
BAB 1 : PENDAHULUAN
Bab ini akan menjelaskan mengenai latar belakang pemilihan judul skripsi
“Implementasi mikrokontroler atmega 8535 pada solar sel statis dan dinamis
terhadap panel surya”, rumusan masalah, batasan masalah, tujuan penelitian,
manfaat penelitian, metodologi penelitian, dan sistematika penulisan.
BAB 2 : LANDASAN TEORI
Bab ini membahas mengenai teori-teori yang berkaitan dengan perancangan
hardware.
BAB 3 : ANALISIS DAN PERANCANGAN SISTEM
Bab ini menjelaskan analisis dan perancangan sistem kerja perangkat keras
yang dibuat dengan mikrokontroler atmega 8535.
BAB 4 : IMPLEMENTASI DAN PENGUJIAN SISTEM
Bab ini berisi implementasi perancangan sistem dari hasil analisis dan
perancangan yang sudah dibuat, serta menguji sistem untuk menemukan
kelebihan dan kekurangan pada sistem yang dibuat.
BAB 5 : KESIMPULAN DAN SARAN
Bab ini berisi kesimpulan dari keseluruhan uraian bab-bab sebelumnya dan
saran-saran yang diharapkan dapat bermanfaat dalam pengembangan
BAB 2
LANDASAN TEORI
Di dalam penulisan tugas akhir ini, penulis mengambil beberapa tinjauan pustaka yang
dijadikan sebagai bahan dalam mendukung penyusunan tugas akhir ini. Adapun
tinjauan pustaka tersebut antara lain sebagai berikut:
2.1.Photovoltaic Cell
Energi listrik dapat dibangkitkan dengan mengubah sinar matahari melalui sebuah
proses yang dinamakan photovoltaic (PV). Photo merujuk kepada cahaya dan volatic merujuk pada tegangan. Photovoltaic cell dibuat dari material semikonduktor terutama silikion yang dilapisi oleh bahan tambahan khusus. jika cahaya matahari mencapai sel
maka elektron akan terlepas dari atom silikon dan mengalir membentuk sirkuit listrik
sehingga energi listrik dapat dibangkitkan. Menurut Chenni et. al (2007) Sel surya
selalu didesain untuk mengubah cahaya menjadi energi listrik sebanyak-banyaknya
dan dapat digabung secara seri atau paralel untuk menghasilkan tegangan dan arus
yang diinginkan. Sedangkan pemanfaatan energi surya menurut Mirdanies et. al
(2011) sebagai sumber energi listrik dapat dihasilkan menggunakan panel fotovolatik
atau pemusatan sinar surya.
Kinerja dari photovoltaic cell sangat tergantung kepada sinar matahari yang diterimanya. Kondisi iklim (misal awan dan kabut) mempunyai efek yang sangat
signifikan terhadap jumlah energi matahari yang diterima sel sehingga akan
1. single crystal silicon,
2. multi crystal silicon, dan
3. amorphous silicon.
Amorphous jenis panel surya terbaik. Panel surya Amorphous diciptakan
dengan menyemprotkan silikon ke kaca di lapisan sangat tipis, dan umumnya dikenal
sebagai panel surya film tipis. Dari proses ini memungkinkan jenis panel surya ini
kualitasnya menjadi lebih baik pada pembangkit listrik tenaga surya di segala kondisi
pencahayaan, termasuk lingkungan berawan atau teduh. Panel surya amorphous tahan
terhadap cuaca dan cocok untuk pemakaian di luar gedung. Mereka memiliki operasi
maksimum kisaran suhu -40 sampai +176 derajat Fahrenheit, hampir tidak ada
perawatan, dan juga efektif pada hari berawan (Iqbal, 2014).
Tabel 2.1 Perbandingan Antara Jenis-Jenis Sel Surya
2.2.Pergerakan Matahari
Dikarenakan dalam penelitian ini tidak menggunakan sensor pendeteksi cahaya
melainkan timer RTC (Real Time Clock) untuk mengetahui posisi pergerakan
matahari. Maka, diperlukan proses penentuan ketetapan pergerakan matahari setiap
derajatnya untuk mendapatkan hasil yg maksimal. Untuk itu menurut Febi & Tiryono
(2008) dalam jurnalnya berjudul Korespondensi Lintasan Matahari dan Bulan Sebagai Dasar Untuk Membangun Model dan Database Kecerahan Sinar Bulan telah menghasilkan dan membahas bahwa satu hari memiliki durasi 24 jam, maka bola
8
360/24 = 15°/jam sehingga, 60 menit/ 15° menghasilkan empat menit per satu derajat.
Berdasarkan ketentuan ini, penulis menerapkan pada alat untuk bergeser posisi dari
timur ke barat setiap empat menit sebesar satu derajat.
2.3.Perangkat Keras
Adapun perangkat keras yang digunakan dalam dalam tugas akhir ini adalah sebagai
berikut:
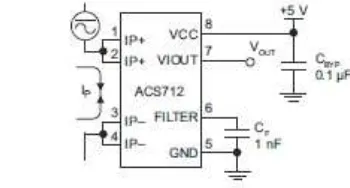
2.3.1. Sensor Arus ACS712
Sensor arus adalah alat yang digunakan untuk mengukur kuat arus listrik. Sensor arus
ini menggunakan metode Hall Effect Sensor. Hall Effect Sensor merupakan sensor yang digunakan untuk mendeteksi medan magnet
Gambar 2.1 Sensor Arus ACS712
Hall Effect Sensor akan menghasilkan sebuah tegangan yang proporsional dengan kekuatan medan magnet yang diterima oleh sensor tersebut. Pendeteksian
perubahan kekuatan medan magnet cukup mudah dan tidak memerlukan apapun selain
sebuah induktor yang berfungsi sebagai sensornya.
Kelemahan dari detektor dengan menggunakan induktor adalah kekuatan
medan magnet yang statis (kekuatan medan magnet nya tidak berubah) tidak dapat
dideteksi. Oleh sebab itu diperlukan cara yang lain untuk mendeteksi nya yaitu dengan
untuk mengalirkan arus listrik. Dengan metode ini arus yang dilewatkan akan terbaca
pada fungsi besaran tegangan berbentuk gelombang sinusoidal.
2.3.2. Mikrokontroler ATMega 8535
Mikrokontroler, sesuai namanya adalah suatu alat atau komponen pengontrol atau
pengendali yang berukuran mikro atau kecil. sebelum ada mikrontroler, telah ada
terlebih dahulu muncul mikroprosesor. Bila dibandingkan dengan mikroprosesor,
mikrokontroler jauh lebih unggul karena terdapat berbagai alasan, diantaranya :
1. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia
2. Memori internal
memori merupakan media untuk menyimpan program data sehingga mutlak
harus ada. Mikroprosesor belum memiliki memori internal sehingga memerlukan IC
memori eksternal. Dengan kelebihan-kelebihan diatas serta dengan harga yang relatif
murah sehingga banyak penggemar elektronika yang kemudian beralih ke
mikrokontroler. Namun demikian, meski memiliki berbagai kelemahan,
mikroprosesor tetap digunakan sebagai dasar dalam mempelajari mikrokontroler. Inti
kerja dari keduanya adalah sama, yakni sebagai pengendali suatu sistem.
Mikrokontroler merupakan komputer di dalam chip yang digunakan untuk
mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya.
Secara harfiahnya bisa disebut "pengendali kecil" dimana sebuah sistem elektronik
yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC
TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan
oleh mikrokontroler ini. Dengan menggunakan mikrokontroler ini maka :
1. Sistem elektronik akan menjadi lebih ringkas.
2. Rancangan bangun sistem adalah perangkat lunak yang mudah dimodifikasi.
3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak.
Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen IC TTL
dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau
sekedar menambah jumlah saluran input dan output (I/O). dengan kata lain,
mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena
mikrokontroler sudah mengandung beberapa bagian yang langsung bisa dimanfaatkan,
10
konversi analog ke digital (ADC), dan sebagainya hanya menggunakan minimum
sistem yang tidak rumit atau kompleks.
Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya
mikroprosesor sebagai otak komputer. Namun mikrokontroler memiliki nilai tambah
karena didalamnya sudah terdapat memori dan sistem input/output dalam suatu
kemasan IC. Mikrokontroler AVR (Alf and Vegard’s RISC processor) standar
memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16- bit dan
sebagian besar instruksi dieksekusi dalam satusiklus clock. Berbeda dengan instruksi
MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CISC (seperti
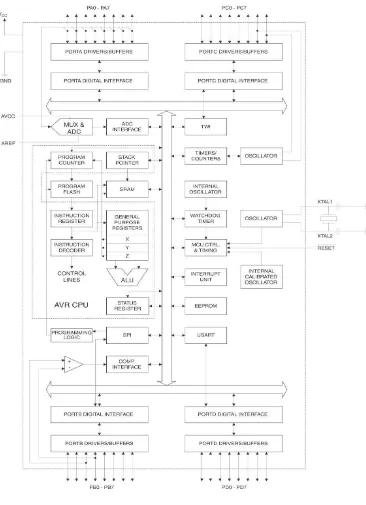
komputer). Menurut iswanto (2008) mikrokontroler ATMega 8535 memiliki fitur
yang sama dengan mikrokontroler AT90S8535. Selain itu, konfigurasi pin AVR
ATMega 8535 juga kompatibel dengan AT90S8535. Fasilitas yang lengkap tersebut
menjadikan ATMega 8535 sebagai mikrokontroler yang powerful. Adapun blok
diagramnya sebagai berikut :
12
2.3.3. Bagian Sumber Tegangan
Sumber tegangan yang dibutuhkan agar sistem dapat bekerja dengan stabil adalah
sekitar 5V DC dan tidak lebih dari 6V. Jika tegangan yang diberikan pada sistem
melebihi batas ini maka dapat merusak komponen seperti mikrokontroler atau LCD.
Sumber tegangan ini selanjutnya akan diberikan kepada komponen-komponen yang
ada pada sistem, dan komponen lain yang membutuhkan sumber tegangan. Sumber
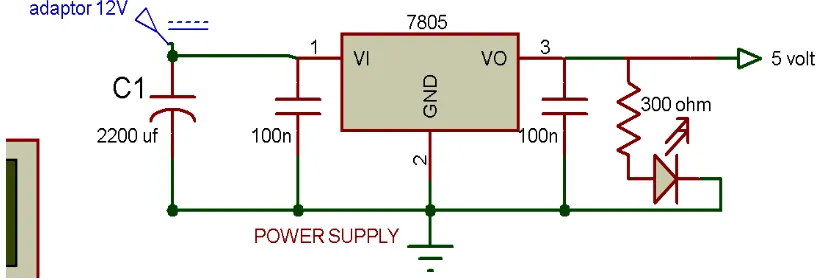
tegangan diperoleh dari adaptor 12 V. Hal ini dikarenakan agar sistem dapat bekerja
secara otonom dan sistem dapat terus bekerja selama 24 jam penuh dalam sehari tanpa
mengalami gangguan kekurangan sumber tegangan. Saat adaptor dapat bekerja
dengan baik dan memberikan tegangan yang cukup kepada sistem, Gambar 2.4
menunjukkan rancangan sumber tegangan yang digunakan pada sistem dan agar
sistem tidak rusak diakarenakan tegangan 12 V, maka diturunkan terlebih dahulu
menggunakan ic 7805 agar tegangan yang terpasok ke sistem tetap 5 Volt.
Gambar 2.3 Power supply Dari Adaptor
2.3.4. Bagian ISP Programmer
Programmer/downloader berfungsi untuk menanam program yang telah di buat
sebelumnya di editor codevision avr. Program yang telah berhasil dibuat kemudian
dicompile sehingga menghasikan code program berekstensi .hex, untuk mendownload
file hasil kompilasi ini, maka komputer atau PC harus terhubung dengan sistem
mikrokontroller dengan menggunakan Programmer. Satu sisi programmer
Programming). Programmer ini menggunakan satu buah port usb. Penanaman program hex ini hanya membutuhkan sekali penanaman saja, dan setelah di download,
maka sistem dapat bekerja secara mandiri dan programmer dapat di cabut dari sistem
Gambar 2.4 Gambar HardwareProgrammerAVR
2.3.5. Bagian Output ke LCD
LCD LMB162A memiliki 16 pin, delapan pin sebagai bus data, tiga pin sebagai bus
kontrol, dan lima pin lainnya sebagai jalur power supply dan pengaturan kontras LCD. Perancangan antarmuka LCD membutuhkan delapan jalur bus data dan dua jalur bus
kontrol dipersingkat menjadi empat jalur bus data. Pada gambar dibawah ditunjukkan
14
Gambar 2.5 Antarmuka Bagian Output LCD
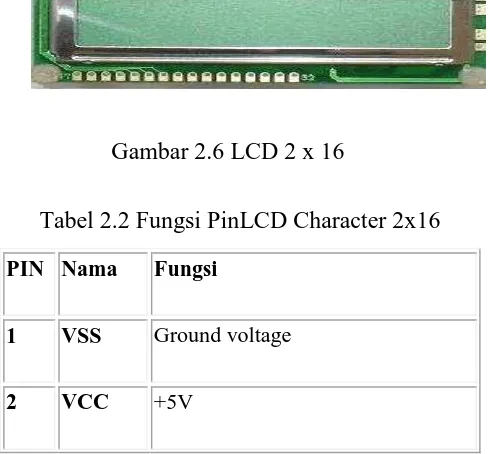
Display LCD 2x16 berfungsi sebagai penampil nilai kecapatan refferensi dan
kecepatan aktual yang dikirim dari mikrokontroler. LCD yang digunakan pada alat ini
mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character
2x16, dengan 16 pin konektor, yang didifinisikan sebagai berikut:
Gambar 2.6 LCD 2 x 16
Tabel 2.2 Fungsi PinLCD Character 2x16
PIN Nama Fungsi
1 VSS Ground voltage
3 VEE Contrast voltage
4 RS
Register Select
0 = Instruction Register 1 = Data Register
5 R/W
Read/ Write, to choose write or read mode
0 = write mode 1 = read mode
6 E
Enable
0 = start to lacht data to LCD character
1= disable
7 DB0 LSB
8 DB1 -
9 DB2 -
10 DB3 -
11 DB4 -
12 DB5 -
13 DB6 -
14 DB7 MSB
15 BPL Back Plane Light
16
Modul LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks
yang kita tuliskan ke modul LCD akan disimpan didalam memory ini, dan modul
LCD secara berturutan membaca memory ini untuk menampilkan teks ke modul LCD
itu sendiri.
Gambar 2.7 Peta MemoryLCDCharacter 2x16
Pada peta memori diatas, daerah yang berwarna biru ( 00 s/d 0F dan 40 s/d 4F)
adalah display yang tampak. jumlahnya sebanyak 16 karakter per baris dengan dua
baris. Angka pada setiap kotak adalah alamat memori yang bersesuaian dengan posisi
dari layar. Dengan demikian dapat dilihat karakter pertama yang berada pada posisi
baris pertama menempati alamat 00h. dan karakter kedua yang berada pada posisi
baris kedua menempati alamat 40h. Agar dapat menampilkan karakter pada display
maka posisi kursor harus terlebih dahulu diset. Instruksi Set Posisi Kursor adalah 80h.
dengan demikian untuk menampilkan karakter, nilai yang terdapat pada memory harus
ditambahkan dengan 80h.
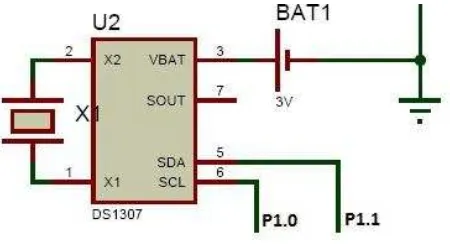
2.3.6. Bagian Real Time Clock (RTC) DS1307
RTC adalah jenis pewaktu yang bekerja berdasarkan waktu yang sebenarnya
atau dengan kata lain berdasarkan waktu yang ada pada jam kita. Agar dapat
berfungsi, pewaktu ini membutuhkan dua parameter utama yang harus ditentukan,
Gambar 2.8 Antarmuka Bagian RTC DS1307
DS1307 merupakan salah satu tipe IC RTC yang dapat bekerja dalam daya
listrik rendah. Di dalamnya berisi waktu jam dan kalender dalam format BCD. Waktu
jam dan kalender memberikan informasi detik, menit, jam, hari, tanggal, bulan, dan
tahun. Pendeteksi sumber listrik juga disediakan untuk mendeteksi kegagalan sumber
listrik dan langsung mengalihkannya ke sumber baterai. RTC difungsikan sebagai
penyimpan data jam walaupun sumber tegangan utama mati atau rusak. DS1307 dapat
dijalankan dalam aturan 12 jam atau 24 jam. RTC DS1307 hanya diprogram satu kali
dimana waktu selanjutnya secara otomatis diperbaharui.
2.3.7. Perancangan Sensor Arus
Pengukuran arus biasanya membutuhkan sebuah resistor shuntyaitu resistor yang
dihubungkan secara seri pada beban dan mengubah aliran arus menjadi tegangan.
Tegangan tersebut biasanya diumpankan ke current transformer terlebih dahulu sebelum masuk ke rangkaian pengkondisi sinyal.
Teknologi Hall effect yang diterapkan oleh Allegro menggantikan fungsi resistor shunt dan current transformer menjadi sebuah sensor dengan ukuran yang relatif jauh lebih kecil. Aliran arus listrik yang mengakibatkan medan magnet yang
menginduksi bagian dynamic offset cancellation dari ACS712 ELC-5A. bagian ini akan dikuatkan oleh amplifier dan melalui filter sebelum dikeluarkan melalui kaki 6
18
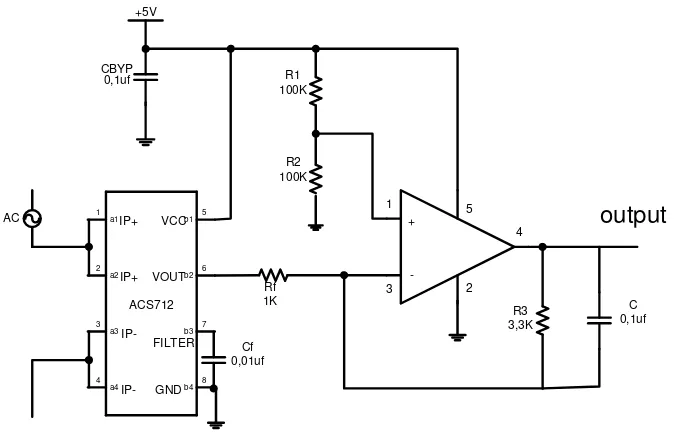
Gambar 2.9 Rangkaian Aplikasi Sensor Arus ACS 712 ,5 Ampere
Dari gambar 2.9 rangkaian aplikasi IC ACS 712 diatas, didapatkan hasil output
tegangan DC. Tegangan output sensor terlalu kecil, maka diperlukan penguatan agar
hasil output sensor menjadi lebih besar. Rangkaian penguatan berupa Op- Amp
Gambar 2.10 Konfigurasi Pin LM321 dan Rangkaian Inverting Amplifier
Gambar 2.10 menunjukkan rangkaian sensor arus ACS 712 dengan keluaran 5
ampere lengkap dengan rangkaian inverting amplifier. Karena siyal tegangan output
) ... (1)
Jika penguatan (gain) sebesar 3 kali maka:
Sehingga
= 3
Ditetapkan terlebih dahulu
2.3.8. Rangkaian Driver Motor Servo MG996R
Motor servo mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut
pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty
cycle sinyal PWM pada bagian pin kontrolnya.
Rangkaian mikrokontroler yang digunakan adalah ATmega8535 yang
merupakan pusat pengolahan data dan pusat pengendali. Dalam rangkaian
mikrokontroler ini terdapat empat buah port (A,B,C, D) yang dapat digunakan untuk
menampung input atau output data. Port A digunakan sebagai input data,Port B.0
dan B.1 digunakan untuk mengontrol motor servo. Motor servo yang digunakan
adalah motor servo standar 1800 seperti pada Gambar dibawah.
20
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW)
dengan defleksi masing-masing sudut mencapai 900, sehingga total defleksi sudut
dari kanan–tengah–kiri adalah 1800 . untuk mengatur motor servo MG99R ini perlu
dilakukan perhitungan. Dimana posisi awal motor servo atau 00 adalah bernilai 900
(tergantung dari jenis dan merk motor servo) dan posisi akhir atau 1800 adalah bernilai
3100. Sehingga untuk menggerakkan motor servo setiap derajatnya 3100-900/1800 =
12,2 per derajat. Maka nilai yg diberikan pada servo untuk menggerakan 10 yaitu
sebesar 12,2
Gambar 2.12 Gambar Rangkaian Motor Servo
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai
delay yang kita berikan. Untuk membuat servo pada posisi center, berikan pulsa
1.5ms. Untuk memutar servo ke kanan, berikan pulsa <=1.3ms, dan pulsa >= 1.7ms
untuk berputar ke kiri dengan delay 20ms. Apabila beban lebih besar daripada torsi
maksimal motor servo, maka motor servo tidak dapat bergerak dan dapat
2.3.9. Rangkaian RS 232
Komunikasi serial merupakan hal yang penting dalam sistem embedded, karena
dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler
dengan devais lainnya. Port serial pada mikrokontroller terdiri atas dua pin yaitu RXD
dan TXD, RXD berfungsi untuk menerima data dari komputer/perangkat lainnya,
TXD berfungsi untuk mengirim data ke komputer/perangkat lainnya.
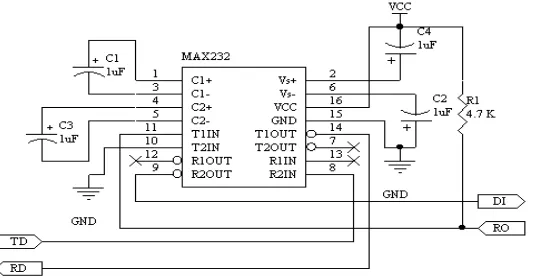
Gambar 2.13 MAX232 Dalam Rangkaian
Standar komunikasi serial untuk komputer ialah RS-232, RS-232 mempunyai
standar tegangan yang berbeda dengan serial port mikrokontroler, sehingga agar
sesuai dengan RS-232 maka di butuhkan suatu rangkaian level converter, IC yang digunakan bermacam-macam, tetapi yang paling mudah dan sering digunakan ialah IC
MAX232/HIN232.
2.4. Perangkat Lunak
Adapun perangkat lunak yang digunakan dalam dalam tugas akhir ini adalah sebagai
berikut:
2.4.1. CodeVision AVR
Untuk menguji dan menjalankan program pada mikrokontroler AVR maka dapat
22
Untuk compiler yang digunakan dalam program mikrokontroler AVR pada alat ini menggunakan software CodeVisionAVR. software ini memiliki berbagai fitur yang
dapat membantu kita dalam membuat program yang akan kita masukkan ke dalam
mikrokontroler kelas AVR. CodeVision AVR mempunyai suatu keunggulan dari
compiler lain, yaitu adanya codewizard. Fasilitas ini memudahkan kita dalam
inisialisasi mikrokontroler yang akan kita gunakan.
Mikrokontroler atmega 8535 merupakan bagian dari mikrokontroler AVR,
dimana mikrokontroler buatan Atmel ini menggunakan arsitektur RISC (Reduce
Instruction Set Computer) artinya prosesor ini memiliki set instruksi program yang
lebih sedikit dibandingkan dengan MCS-51 yang menerapkan arsitektur CISC
(Complex Instruction Set Computer). Menurut Iswanto (2008) hampir semua instruksi
prosesor RISC adalah instruksi dasar namun belum tentu sederhana, sehingga
instruksi-instruksi ini umumnya hanya memerlukan satu siklus mesin untuk
menjalankannya. Kecuali instruksi percabangan yang membutuhkan dua siklus mesin
dan RISC biasanya dibuat dengan arsitektur Harvard, karena arsitektur ini yang memungkinkan untuk membuat eksekusi instruksi selesai dikerjakan dalam satu atau
dua siklus mesin, sehingga akan semakin cepat dan handal. Meskipun
CodeVisionAVR termasuk software komersial, namun kita tetap dapat
menggunakannya dengan mudah karena terdapat versi evaluasi yang disediakan
secara gratis walaupun dengan kemampuan yang dibatasi. Menurut Bejo (2008) dari
beberapa software kompiler C yang pernah digunakannya, CodeVisionAVR
merupakan yang terbaik bila dibandingkan dengan kompiler-kompiler yang lain
karena beberapa kelebihan yang dimiliki oleh CodeVisionAVR antara lain:
1. Menggunakan IDE (Integrated Development Environment).
2. Fasilitas yang disediakan lengkap (mengedit program, mengkompile
program, mendownload program) serta tampilannya terlihat menarik dan
mudah dimengerti. Kita dapat mengatur editor sedemikian rupa sehingga
membantu memudahkan kita dalam penulisan program.
3. Mampu membangkitkan kode program secara otomatis dengan
menggunakan fasilitas CodeWizardAVR.
4. Memiliki fasilitas debugger sehingga dapat menggunakan software
5. Memiliki terminal komunikasi serial yang terintegrasi dalam
CodeVisionAVR sehingga dapat digunakan untuk membantu pengecekan
program yang telah dibuat khususnya yang menggunakan fasilitas
komunikasi serial UART.
2.5. Penelitian Pembahasan Solar Tracker
Beberapa penelitian Solar Tracker yang relevan dengan penelitian yang diangkat dalam karya ilmiah ini adalah sebagai berikut:
1. Midriem dan Andry (2011), mengatakan dalam penelitiannya yang bertujuan
untuk menciptakan alat pelacak sinar matahari dengan energi yang hemat beserta
fasilitas telekontrolnya dengan mengkombinasikan timer dan sensor cahaya.
Sehingga tegangan yang diperoleh lebih maksimum dan untuk efisiensi tegangan
maksimum dapat menggunakan motor DC berdaya rendah dalam menggerakkan
alat. Ini membuat energi yang terbuang untuk mensuplai motor DC menjadi lebih
kecil. Untuk mengontrol arah pergerakan matahari yang sewaktu-waktu dapat
dipengaruhi oleh cuaca maka digunakan modul sensor cahaya dan ketika
mendung ini mengurangi intensitas cahaya pada panel surya sehingga diperlukan
timer untuk mengatasi kondisi ini agar pencahayaan tetap stabil. Pengendalian
jarak jauh dapat menggunakan wifi. Sehingga memudah kan untuk mengawasi
suhu dan memeriksa energi yang dihasilkan dari jarak yang jauh. Dalam
penelitiannya diperoleh sinyal keluaran 0-4 volt saat cuaca cerah dan 3,3 – 3,9
volt saat mendung kemudian 1,5-3,3 ketika cuaca agak cerah.
2. Rif'an dan Sholeh (2012), dalam penelitiannya yang bertujuan untuk
menghasilkan energi yang paling besar yang dihasilkan oleh tenaga matahari
melalui solar tracker ketika sudut deviasinya lima derajat. Energi keluar yang dihasilkan yaitu 6.127. merupakan energi terbesar yang didapat dari penelitian ini.
Untuk mendapatkan hasil sesuai dengan keinginan maka disarankan menentukan
sudut sinar datang. Misalkan diasumsikan sehari sel surya mendapatkan energi
selama 12 jam, dari timur ke barat (180º). Jika sel surya digerakkan untuk
24
digerakkan setiap 1 jam 20 menit. Jika sel surya digerakkan untuk menjaga sudut
datang selalu dibawah atau sama dengan 20º, maka sel surya perlu digerakkan
setiap 2 jam 40 menit. Dapat diketahui penentuan sudut datang sinar matahari
sangat mempengaruhi pergerakkan solar tracker untuk mendapatkan energi matahari secara optimal jika menggunakan timer.
3. Budi (2005), mengatakan dalam penelitiannya tentang cara mengoptimalkan sel
surya untuk mendapatkan energi maksimal menggunakan sistem pelacak yaitu
dengan mengatur posisi solar sel terhadap matahari. Untuk mengatur posisi
tersebut dibantu dengan mikrokontroler. Dari hasil penelitiaannya juga
mengatakan energi lebih besar diperoleh pada solar tracker dinamis dibandingkan solar tracker statis. Peningkatan keluaran energi jika dibandingkan dengan panel pada posisi statis adalah sebesar 14,98% pada pengukuran I dan 13,37% pada
pengukuran II. Ini menunjukkan bahwa hasil sel surya dinamis lebih maksimal
daripada hasil energi yang dihasilkan sel surya statis. adapun dalam penelitiannya,
peneliti menggunakan sensor cahaya dan kombinasinya dalam menggeserkan sel
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
Bab ini menjelaskan analisis dan perancangan sistem yang dibuat dengan
mikrokontroler atmega 8535.
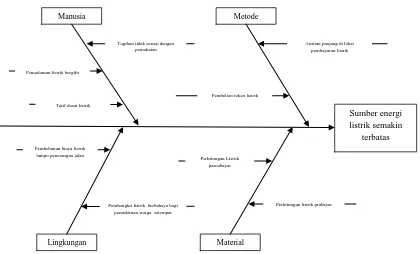
3.1 Analisis Masalah
Masalah utama yang diangkat dari penelitian ini adalah bagaimana
mengimplementasikan Teknologi embedded system mikrokontroller dalam meningkatkan efisiensi penyerapan panel surya terhadap sinar matahari. Sehingga alat
yang dibuat dapat menghasilkan tegangan yang maksimal.
Gambar 3.1. merupakan diagram Ishikawa yang dapat digunakan untuk menganalisis masalah. Bagian kepala atau segiempat yang berada di sebelah kanan
26
Gambar 3.1 Diagram Ishikawa Untuk Analisis Masalah
3.2 Analisis Kebutuhan Sistem
Perancangan sistem terdiri dari dua bagian yaitu perancangan sistem perangkat keras
dan perancangan sistem perangkat lunak. Sistem perangkat keras yang digunakan
untuk pembuatan sistem terdiri dari beberapa bagian atau komponen utama. Setiap
komponen ini membutuhkan antarmuka yang merupakan jalur komunikasi dengan
komponen lainnya dan sebagai titik koneksi sumber daya atau tegangan yang dibagi
dengan komponen lainnya. Oleh karena itu, perancangan antarmuka ini tidak boleh
sembarangan dan harus lebih diperhatikan kelebihan dan kekurangannya. Misalnya
saja dari segi komunikasi, antarmuka yang dibuat untuk komponen yang bersangkutan
nantinya harus dapat membuat komponen ini dapat berkomunikasi dengan
komponen-komponen lainnya. Jika antarmuka komponen-komponen ini nantinya juga dapat digunakan
untuk pengembangan sistem perangkat keras lainnya atau dapat bekerja dengan
kecepatan yang tinggi sehingga tidak membutuhkan penundaan waktu yang cukup
lama untuk mengeksekusi suatu perintah atau instruksi, maka hal ini merupakan nilai
lebih dari antarmuka yang dirancang.
Manusia
Pembangkit listrik berbahaya bagi pemukiman warga setempat
Perhitungan listrik prabayar Perhitungan Listrik
waktu yang diharapkan atau bahkan komunikasi antara komponen yang satu dengan
komponen yang lain tidak dapat saling dimengerti sehingga menimbukan error atau bug, maka antarmuka seperti ini tidak dapat dipertahankan dan harus diperbaiki atau bahkan diganti dengan rancangan antarmuka yang lain. Perancangan antarmuka
komponen seperti ini juga dapat mempengaruhi efisiensi dalam penulisan kode
program untuk perancangan perangkat lunaknya. Selain itu, perancangan antarmuka
juga harus memperhatikan jumlah komponen yang akan digunakan sehingga dapat
menyederhanakan rangkaian sistem perangkat keras secara keseluruhan.
Dari rancangan perangkat keras untuk sistem yang telah direncanakan
diharapkan dapat mempermudah pengerjaan dalam perancangan perangkat lunaknya
sehingga perangkat lunak yang dibuat dapat lebih efisien dan tidak banyak memakan
ruang memori pada mikrokontroler. Selain itu, juga diharapkan waktu eksekusi oleh
mikrokontroler terhadap perangkat lunak yang dibuat dapat lebih cepat.
Perancangan perangkat lunak untuk sistem ini terdiri peragkat lunak pada
embedded system dan pada modul tampilan interface GUI pada PC. dari beberapa modul program yang ditampilkan dalam bentuk algoritma flowchart yang berfungsi
mengontrol kerja dari komponen-komponen utama yang menyusun perangkat keras
sistem. Modul program ini antara lain program input keypad, program output LCD, program komunikasi 2 wayar (two wire), dan program utama yang mencakup kedua
modul program sebelumnya. Dari program utama ini nantinya akan dipanggil fungsi
atau rutin dari modul program lainnya yang dibutuhkan untuk eksekusi suatu proses
atau perintah tertentu.
Seperti telah disebutkan sebelumnya, sistem perangkat keras yang akan
dibangun terdiri dari beberapa komponen utama, antara lain:
1. Bagian sumber tegangan atau power supply.
2. Bagian programmer dari komputer ke mikrokontroler 3. Mikrokontroler ATMega8535.
4. Real Time Clock (RTC) ds1307
5. Bagian input dari panel surya 6. Bagian output ke LCD.
7. Sensor arus acs712 8. Motor servo
28
Sedang pada prangkat lunak yang digunakan antara lain :
1. Codevision AVR 3.12
2. ProgISP 1.72
3. Delphi Borland 7
Dari komponen-komponen inilah nantinya akan dirancang suatu antarmuka sehingga
memungkinkan komunikasi antar komponen-komponen tersebut.
3.3. Pemodelan Sistem
Pemodelan sistem yang dirancang penulis bertujuan menggambarkan kondisi dan
bagian-bagian yang berperan dalam sistem yang dirancang. Permodelan sistem yang
dirancang penulis tergambar dalam diagram blok dibawah ini :
ATMEGA
Gambar 3.2. Diagram Blok Pemodelan Sistem yang Dirancang
Tabel 3.1. Keterangan Bagian-Bagian Rancangan sistem
Nama bagian Penjelasan dan fungsi
Panel surya Modul converter dari sinar matahari menjadi listrik
Sensor tegangan Menggunakan fitur ADC (analog to Digital Converter)
ATMega untuk mendeteksi tegangan yang dihasilkan oeh
Atmega8535 Sebagai “otak” pengolah utama, sebagai penerima input
dari panel surya, menggerakkan motor servo dan
mengirim data ke PC
LCD Sebagai penampil tampilan dari sistem
Motor Servo Motor penggerak panel surya dinamis agar terus
mengikuti pergerkan matahari
Rs232 Modul untuk mentransmisikan data dari mikrokontroller
ATMega ke PC
PC Sebagai penerima data dari mikrokontroller untuk
ditampilkan di GUI
Solar panel yang digunakan adalah solar panel jenis amorphose yang
memiliki Vout 5,5 volt. Terdapat dua panel surya, panel dinamis yang akan
mengikuti arah pergerakan matahari terhadap bumi dan panel surya statis sebagai
pembanding. panel surya dinamis di kaitkan dengan gear pada motor servo agar dapat
bergerak baik secara horizontal. Motor servo digunakan karena motor servo dapat
dilakukan pengesetan sudut pergerakannya. RTC ds1307 adalah modul pembangkit
Real Time clock sebagai referensi pewaktu bagi sistem untuk menggerakkan motor
servo. Kedua panel surya ini di ukur tegangan dan arusnya menggunakan sensor,
dikarenakan sensor yang digunakan memiliki keluaran berupa tegangan dan bukan
nilai yang dapat dibaca langsung, maka kemudian diolah mengunakan fitur adc dari
mikrokontroller ATMega untuk mendapatkan nilai tegangan dan arusnya agar dapat
dibaca langsung. Hasil dari pengukuran kemudian akan ditransmisikan ke display PC
melalui modul serial RS232
3.4. Perancangan Sistem
Berdasarkan gambaran dari hasil analisis proses maka dibangun suatu model
30
3.4.1. Antarmuka Mikrokontroler ATMega 8535
Perancangan antarmuka untuk mikrokontroler langsung berhubungan dengan
32
Gambar rangkaian di atas adalah skema antarmuka sistem secara keseluruhan.
Mikrokontroler terhubung dengan komponen-komponen lainnya yang membangun
sistem lengkap. Komponen dapat dirangkai sesuai skema rangkaian pada gambar 3.2.
Sebelum merangkai komponen, dipastikan terlebih dahulu komponen tersebut dalam
kondisi yang baik dan layak untuk digunakan. Caranya dengan menguji setiap
komponen tersebut. Pengujian dapat dilakukan dengan bantuan multimeter misalnya
pada sensor arus, mikrokontroler, panel surya dan adaptor. Dapat juga diuji dengan
program misalnya pada RTC, LCD, Motor Servo, ISP Programmer dan RS232.
Proses pengujiannya dapat dilihat pada pembahasan selanjutnya.
Sistem yang dirancang menggunakan mikrokontroler ATMega 8535. Dimana dalam
penerapannya, panel surya bergerak sebesar satu derajat setiap empat menit. Hal ini
ditentukan dari pergerakan matahari dalam sebuah penelitian yang sebelumnya sudah
dijelaskan. Pergerakan motor servo sudah diatur dan mulai bekerja pada pukul 06:30
WIB sampai dengan pukul 18:30 WIB atau setelah posisi panel surya mencapai 180
derajat. Setelah itu motor servo kembali ke posisi semula (nol derajat). Untuk
mengaktifkan alat ini dilakukan secara manual. Sedangkan untuk perpindahan panel
surya diatur oleh sebuah timer. Timer yang digunakan yaitu Real Time Clock (RTC)
DS1307. RTC DS1307 cukup diprogram satu kali saja, dikarenakan selanjutnya akan
Inisialisasi program
Baca komunikasi mikro dengan PC
Gerakkan motor servo + 1 derajat
Baca nilai adc dari panel
surya Nilai menit RTC + 4
menit ?
ya
tidak
Selesai Kirim nilai dari mikro
ke PC baca nilai menit RTC
Gambar 3.4 Flowchart Kerja Sistem Secara Keseluruhan
Dikarenakan sistem tidak menggunnakan sensor mata angin (compass) sehingga untuk penentuan arah mata angin timur dan barat ditentukan secara manual. Hasil
keluaran dapat dilihat pada dua interface yaitu LCD dan PC. Data yang terbaca pada
LCD dalam satuan volt (V) dan ampere (A) sedangkan data yang terbaca pada PC
dalam satuan milivolt (mV) dan miliampere (mA) agar data yang terbaca lebih detail.
Sedangkan data keluaran yang terbaca disimpan dalam sebuah database menggunakan
BAB 4
IMPLEMENTASI DAN PENGUJIAN SISTEM
Bab ini berisi implementasi perancangan sistem dari hasil analisis dan perancangan
yang sudah dibuat, serta menguji sistem untuk menemukan kelebihan dan kekurangan
pada sistem yang dibuat.
4.1. Implementasi Sistem
Implementasi perangkat keras sistem dapat dilakukan dengan dua cara yaitu
menggunakan prototype papan PCB atau menggunakan papan PCB permanen. Dalam penggunaan prototype papan PCB prosesnya sederhana yaitu hanya perlu meletakkan komponen-komponen pada lubang papan PCB yang telah disediakan dan setelah itu menghubungkan kaki-kaki komponen menggunakan kabel. Sedangkan untuk
implementasi perangkat keras yang menggunakan papan PCB permanen prosesnya
lebih rumit dan waktu pengerjaannya lebih lama. Umumnya penggunaan papan PCB
pada sistem perangkat keras yang dibuat haruslah secara permanen.
Beberapa kelebihan penggunaan papan PCB permanen, misalnya untuk
ukuran yang sama harga prototype papan PCB lebih mahal dibandingkan papan PCB permanen dan jumlah komponen yang dapat ditampung prototype papan PCB juga lebih sedikit dibandingkan papan PCB permanen. Oleh karena itu, dalam
Seperti yang telah dijelaskan pada bab sebelumnya bahwa sistem perangkat keras
yang akan dibangun ini terdiri dari beberapa bagian atau komponen utama, yaitu
Panel Surya, power supply, clock eksternal, Sensor arus, mikrokontroler, RTC, output LCD, Motor Servo dan programmer untuk mikrokontroler. Untuk power supply terdapat beberapa pilihan, namun power supply yang akan digunakan adalah power supply yang berasal dari listrik PLN yang akan di ubah menjadi tegangan listrik dengan variasi 12V dan 5V DC. Sebagai persiapan awal dalam implementasi sistem
perangkat keras adalah penyediaan komponen-komponen elektronik sebagai
perangkat kerasnya. Tabel 4.1 memperlihatkan daftar komponen-komponen yang
diperlukan.
Tabel 4.1 Daftar Komponen Yang Diperlukan Untuk Implementasi Sistem
36
4 Sensor Arus ACS712 5A 2
5 Aktuator Motor servo - 1
6 Panel Surya Panel Surya 5,5 V, 100 mA 2
7 Output LCD LCD LMB162A 1
Potensiometer 10 –50 KΩ 1
8 Programmer
mikrokontroler
Konektor ISP
Programmer
1
9 RTC I2C Ds1307 1
10 Komunikasi serial RS232 - 1
11 Lain-lain Kabel - secukupnya
Timah - secukupnya
Papan PCB - secukupnya
Setelah komponen-komponen yang diperlukan telah tersedia, maka untuk
membangun sistem perangkat keras ini harus diketahui skema rangkaian sistem secara
Langkah-langkah implementasi sistem pada papan PCB adalah sebagai berikut: 1. Memasang kaki-kaki komponen seperti IC mikrokontroler, 7805 dan resistor,
kapasitor, kristal, dioda, dan komponen-komponen lainnya yang diperlukan.
Beberapa komponen tidak dihubungkan langsung pada PCB melainkan dihubungkan menggunakan kabel dan komponen tersebut diletakkan di luar PCB. Komponen ini misalnya adaptor.
2. Menyolder kaki-kaki komponen menggunakan timah sesuai dengan skema
rangkaian sistem perangkat keras yang telah direncanakan. Berikut ini adalah
rangkaian mikrokontroler:
Gambar 4.1 Rangkaian mikrokontroler ATMega 8535
3. Merangkai sensor arus sesuai dengan skema rangkaian kemudian dihubungkan ke
38
Gambar 4.2 Rangkaian sensor arus ACS 712
4. Memasang motor servo dengan bantuan acrelyc agar dapat menggerakkan panel surya dan mengatur agar sesuai dengan pergerakan panel surya.
Gambar 4.3 Rangkaian motor servo dan panel surya dinamis
Gambar 4.4 Rangkaian LCD 2x16
6. Lakukan pengujian koneksi antara kaki-kaki komponen yang telah dihubungkan
sebelumnya. Pengujian ini dilakukan dengan menggunakan multimeter, dengan
mengukur hambatan pada dua terminal kaki komponen yang akan diuji. Jika
hambatannya adalah 0 Ω, maka hubungan atau koneksi antara kaki-kaki
komponen telah baik.
Setelah semua komponen yang diperlukan untuk membangun sistem dirangkai
pada papan PCB, langkah selanjutnya adalah implementasi untuk pembuatan kode program atau perangkat lunaknya.
4.1.3. Implementasi Perangkat Lunak untuk Sistem
Perangkat lunak yang dibuat ini akan menjalankan fungsi-fungsi perangkat keras yang
telah dirangkai. Perangkat lunak ini dibuat dengan menggunakan bahasa C dan kompiler ISP Programmer yang khusus digunakan untuk mengkompile program-program dalam bahasa C yang dibuat untuk menjalankan mikrokontroler dari keluarga AVR. Perangkat lunak ini sendiri terdiri atas beberapa modul program yang lebih
khusus dan spesifik untuk hardware atau komponen tertentu.
40
Untuk melakukan pengaturan pada mikrokontroler dapat menggunakan program dari
CodeVisionAVR. Dengan bantuan aplikasi ini memudahkan programmer untuk
mengkompile dan mengatur setiap komponen yang terhubung ke mikrokontroler.
Berikut tampilan CodeVisionAVR 3.12.
Gambar 4.6 Interface CodeVisionAVR 3.12
Sedangkan untuk menanamkan program yang telah kita buat pada CodeVisionAVR
3.12 ke dalam mikrokontroler, dapat menggunakan aplikasi ProgISP. Program yang
telah dibuat pada CodeVisionAVR disimpan ke dalam format .hex. dan pada aplikasi
Gambar 4.7 ProgISP 17.2
4.2. Pengujian Sistem
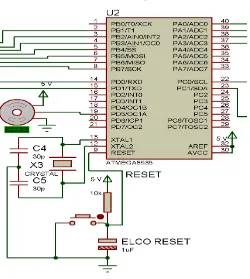
Pengujian rangkaian Mikrokontroler dapat dilakukan dengan cara menghubungkan
rangkaian sistem minimum dengan sumber tegangan 5 V. Dimana pin 10
Mikrokontroler dihubungkan dengan tegangan 5 volt dan pin 11 dihubungkan dengan
42
Gambar 4.8 Rangkaian Pengujian Mikrokontroler
Kemudian pin 12 dan pin 11 dihubungkan ke XTAL dan dua buah kapasitor.
XTAL ini akan mempengaruhi kecepatan mikrokontroller ATMega8535 dalam
mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif
rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroller tersebut. Sistem Mikrokontrollermerupakan sistem pengendali semua rangkaian yang
ada pada sistem. Proses pengujian sistem minimum mikrokontroller dilakukan dengan
menghubungkan sistem sensor sebagai input dan LCD, juga PC (personal computer) sebagai output. Sebuah program sederhana untuk mengecek kondisi sensor yang
hasilnya ditampilkan di LCD diisikan kedalam mikrokontroller.
Untuk menghubungkan sistem mikrokontroller ke PC, maka diperlukan
komunikasi serial. Komunikasi serial yang digunakan yaitu Max232 dapat dideteksi
dengan menggunakan software Hyper Terminal buatan microsoft. Dengan
menggunakan software hyper terminal kita akan dapat mencoba input/output dari/ke
mikrokontroller.
Secara elektronis rangkaian sudah bekerja dengan baik, keluaran dari
mikrokontroller dapat ditampilkan pada PC. Sensor dirancang untuk mendeteksi
adanya tegangan dan arus yang nantinya akan diumpankan ke ADC sebagai input
analog yang nantinya akan masuk ke rangkaian sistem minimum mikrokontroller,
dapat dibaca oleh mikrokontroller dan perhitungan telah diprogramming, sehingga
hasilnya akan ditampilkan pada LCD dan PC.
4.2.1. Pengujian Sensor Arus
Dari rangkaian aplikasi IC ACS712 5 Ampere, didapatkan hasil output setiap
perubahan 10 miliampere arus input maka hasil output berupa tegangan akan berubah
tiap 1.85 mV. Sinyal output yang dihasilkan IC ACS712 merupakan inverting dari
sinyal input. Sehingga diperlukan inverting amplifier agar sinyal output sama dengan
sinyal input IC ACS712. Pengujian dilakukan dengan menggunakan hambatan
resistor. Sesuai dengan hukum ohm :
V = I x R ... (2)
Dimana :
V = tegangan dalam suatu rangkaian tertutup
I = arus yang mengalir dalam rangkaian tertutup
R = Hambatan (nilai resistor ) dalam rangkaian
arus yang mengalir dalam suatu rangkaian tertutup dapat di ketahui dengan
membagi antara tegangan yang mengalir di rangkaian dengan resistor hambatan yang
dipakai
Tabel 4.2 Data Pengujian Sensor Arus ACS712
44
semakin tinggi nilai arus yang diukur maka semakin tinggi pula tegangan keluaran
pada sensor arus ACS712
4.2.2. Pengujian Rangkaian RTC DS-1307
Pengujian rangkaian RTC DS-1307 dilakukan dengan memberi perintah pengambilan
data dari RTC ds1307 dengan komunikasi jalur data I2C melalui mikrokontroller.
Berikut adalah listing programnya
// DS1307 Real Time Clock initialization
// Square wave output on pin SQW/OUT: Off
// SQW/OUT pin state: 0
rtc_init(0,0,0);
rtc_set_time(12,30,00); //fungsi untuk melakukan setting pada RTC DS-1307
LCD dot matriks 2 x 16 karekater dapat dihubungkan langsung dengan
mikrokontroler ATMega8535, disini fungsi LCD adalah sebagai tampilah hasil
pengukuran dan diberi beberapa keterangan. Pada penelitian ini LCD dihubungkan
kemikrokontroler melalui PortB.1 ~ PortB.7 yang berfungsi bus data. Adapaun data
yang dikirimkan oleh mikrokontroler merupakan kode ASCIIdata dalam bentuk
bilangan biner, dimana data tersebut dapat diterjemahkan oleh LCD ke bentuk
karakter.
Pengiriman data yang dari mikrokontroler diatur oleh pin EN, RS dan RW, Jalur
EN dinamakan Enable. Jalur ini digunakan untuk memberi tahu LCD bahwa ada data
yang sedang dikirimkan. Untuk mengirim data ke LCD, maka melalui program EN
harus dibuat berlogika “low” dan set (high) pada dua jalur kontrol yang lain (RS dan
RW). Jalur RW adalah jalur kontrol Read/write. Ketika RW berlogika low (0), maka
informasi pada bus akan dituliskan pada LCD. Ketika RW berlogika high (1), maka
program melakukan pembacaan memori dari LCD. Dalam penelitian ini umumnya
pin RW selalu diberikan logika low(0)
Dengan mengikuti keterangan diatas kita dapat membuat program untuk
menampilkan karakter pada LCD. Program yang diisikan ke mikrokontroler untuk
menampilkan karakter pada LCD adalah sebagai berikut :
#include < mega8535.h> #include < stdio.h> #include < delay.h>
// Alphanumeric LCD Module functions #include < alcd.h>
// Declare your global variables here void main(void)
{
// Declare your local variables here PORTA= 0xff;
46
// LCD module initialization lcd_init(16);
lcd_gotoxy(0,0); lcd_putsf("syahrial");
Program diatas akan menampilkan kata “syahrial” di baris pertama dimulai dari
kolom pertama pada LCD 2 x 16. Pada penelitian ini, saat seluruh rangkaian
diaktifkan, maka pada LCD akan tampil waktu pada baris pertama, sedang pada baris
kedua akan tampil daya dari pengukuran panel surya statis dan dinamis. Tulisan pada
baris pertama dan kedua tampil secara bersamaan dan diperbaharui setiap satu detik.
4.2.4. Pengujian Rangkaian Motor Servo
Motor servo berputar berdasarkan inputan pulsa duty cycle yang diberikan melalui pin
kontrolnya. Motor servo tidak memerlukan rangkaian eksternal untuk berputar, karena
didalam motor servo sudah memiliki rangkaian control elektronik dan internal gear
untuk mengendalikan pergerakan dan sudut angularnya.
Gambar 4.9 Pergerakan Motor Servo
#include <delay.h>
Jika program ini dijalankan, maka motor servo akan berputar searah jarum jam, lalu
berselang 1 detik kemudian, motor servo akan berputar berlawanan dengan arah jarum
jam.
4.2.5. Pengujian Sistem Secara Keseleruhan
Dalam tahap ini, sistem yang telah dirakit dan diprogram, diuji secara keseleruhan
untuk mengetahui performa dan hasil dari sistem yang di uji.
Sistem di uji dengan meletakkan alat di luar ruangan dan menghadap arah timur,
sesuai dengan perputaran pergerakan matahari. Untuk mengetahui efisiensi dari panel
48
pembanding, data yang di ambil adalah tegangan dan arus dari masing-masing panel
surya. pengujian dilakukan pada pukul 06.29 WIB sampai dengan 18.29 WIB .
Berikut adalah hasil pengujian:
Tabel 4.3 Perbandingan Tegangan Panel Surya Statis dan Dinamis
215 3 142 8 08:11 26
235 2 146 4 08:15 27
254 2 156 6 08:19 28
269 3 161 6 08:23 29
273 6 169 8 08:27 30
273 1 161 6 08:31 31
278 4 167 6 08:35 32
306 6 179 6 08:39 33
322 3 185 5 08:43 34
332 3 185 6 08:48 35
336 5 185 8 08:52 36
366 3 200 3 08:56 37
381 5 215 11 09:01 38
405 3 234 3 09:05 39
406 3 234 6 09:09 40
401 4 239 7 09:13 41
406 7 246 2 09:17 42
406 3 249 5 09:21 43
406 2 259 6 09:25 44
398 8 253 5 09:29 45
398 3 257 8 09:33 46
406 7 266 6 09:37 47
420 7 278 8 09:41 48
425 7 288 7 09:45 49