SIMULASI PENDULUM FOUCAULT DENGAN MENGGUNAKAN
MATHEMATICA 6
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
GINA WARDHANI
060801037
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul
: SIMULASI PENDULUM FOUCAULT DENGAN
MENGGUNAKAN MATHEMATICA 6
Kategori
: SKRIPSI
Nama
: GINA WARDHANI
NIM
: 060801037
Program Study
: SARJANA (S1) FISIKA
Departemen
: FISIKA
Fakultas
: MATEMATIKA DAN ILMU PENGETAHUAN ALAM
(FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, Mei 2011
Diketahui/disetujui oleh
Departemen Fisika FMIPA USU
Ketua,
Pembimbing,
PERNYATAAN
SIMULASI PENDULUM FOUCAULT DENGAN MENGGUNAKAN
MATHEMATICA 6
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing- masing disebutkan sumbernya
Medan, April 2011
PENGHARGAAN
Puji dan Syukur penulis persembahkan kepada Allah SWT yang telah melimpahkan
kasih sayang serta karunia-Nya kepada penulis hingga skripsi yang
berjudul:
“Simulasi Pendulum Foucault Dengan Menggunakan Mathematica 6”
berhasil diselesaikan dengan baik dan tepat pada waktu yang telah ditetapkan.
Shalawat dan salam kepada Nabi Muhammad SAW sebagai suri teladan terbaik di
muka bumi.
Ucapan terima kasih penulis sampaikan kepada Drs. Nasir Saleh, M.Eng.Sc,
selaku pembimbing yang telah memberikan panduan, bantuan, serta segenap perhatian
dan dorongan kepada penulis dalam menyempurnakan skripsi ini. Kemudian ucapan
terimakasih kepada Ibu Dra. Manis Sembiring, MSi selaku dosen wali yang telah
memperhatikan kemajuan studi penulis. Paduan ringkas dan padat serta profesional
telah diberikan kepada penulis sehingga penulis dapat menyelesaikan tugas ini.
Ucapan terimakasih juga ditujukan kepada Ketua dan Sekretaris Departemen Fisika
Dr. Marhaposan Situmorang dan Dra.Justinon, M.Si, Dekan dan Pembantu Dekan
Fakultas MIPA USU, Bapak dan Ibu Staf Pengajar Departemen Fisika FMIPA USU
terima kasih atas ilmu ya ng diberikan selama ini, semoga menjadi ilmu yang
bermanfaat, dan juga kepada seluruh staff pegawai pada departemen Fisika FMIPA
USU.
Ucapan terimakasih terbesar penulis sampaikan kepada Ibunda tercinta
Junaidah atas segala cinta kasih dan do’a yang selalu dihadiahkan kepada penulis
tanpa henti dan skripsi ini dipersembahkan khusus buat ayahanda tercinta (alm)
Ruslan Abdul Gani, SH yang menjadi inspirasi dan kekuatan bagi penulis untuk
menyesaikan kuliah ini sampai selesai, dan M. Rais sebagai uwak yang banyak
membantu, Tak lupa pula terimakasih kepada sahabat-sahabat terbaik penulis, Tari
yang sangat membantu penulis menyelesaikan skripsi ini hingga selesai, Diah dan
semua rekan-rekan fisika angkatan 2006. Semoga Allah SWT akan membalasnya.
Penulis menyadari bahwa skripsi ini masih jauh dari sempurna. Oleh karena
itu, penulis mengharapkan kritik dan saran yang bersifat membangun demi
kesempurnaan skripsi ini. Akhir kata, sesungguhnya Allah Maha Kuasa atas apa yang
dikehendaki-Nya.
ABSTRAK
SIMULATION OF FOUCAULT PENDULUM BY USING MATHEMATICA 6
ABSTRACT
DAFTAR ISI
Halaman
Persetujuan
ii
Pernyataan
iii
Penghargaan
iv
Abstrak
v
Abstract
vi
Daftar isi
vii
Daftar Tabel
viii
Daftar Gambar
ix
Bab 1 Pendahuluan
1
1.1 Latar Belakang
1
1.2 Tujuan Penelitian
2
1.3 Manfaat Penelitian
3
1.4 Batasan Masalah
3
1.5 Sistematika Penulisan
3
Bab 2 Tinjauan Pustaka
5
2.1 Rotasi Bumi
5
2.2 Gaya Coriolis
6
2.3 Pendulum Foucault
7
2.4 Metode Runge-Kutta
11
2.5 Mathematica 6
15
Bab 3 Analisis Masalah dan Perancangan Program
19
3.1 Analisis Masalah
19
3.1.1 Persamaan Gerak Pendulum Foucault
19
3.1.2 Penyelesaian Persamaan Gerak Pendulum Foucault dengan
Metode Runge Kutta Orde Empat
20
3.2 Perancangan Program
22
3.2.1 Perancangan Diagram Alir (
Flowchart
)
23
3.2.2 Algoritma Program Bantu
28
Bab 4 Hasil dan Pembahasan
29
4.1 Pendulum Kutub
32
4.2 Pendulum Lintang
34
4.3 Pendulum Khatulistiwa
37
Bab 5 Kesimpulan dan Saran
39
5.1 Kesimpulan
39
5.2 Saran
39
DAFTAR TABEL
Halaman
Tabel 2.1 Operator Mathematica
15
DAFTAR GAMBAR
Halaman
Gambar 2.1 Rotasi Bumi
6
Gambar 2.2 Pendulum Foucault
7
Gambar 2.3 kerangka inersia dan kerangka non inersia
9
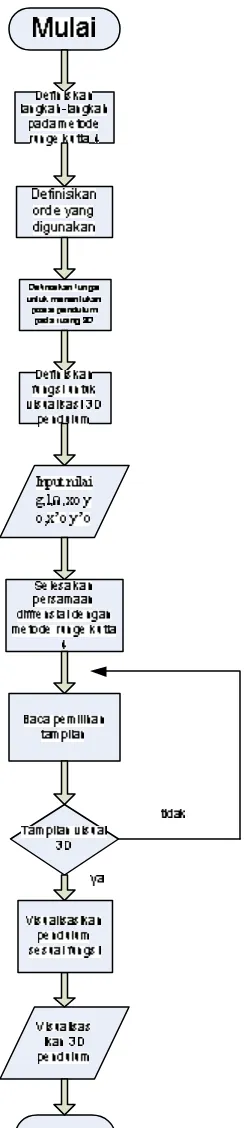
Gambar 3.1. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Unutk visualisasi 3D.
24
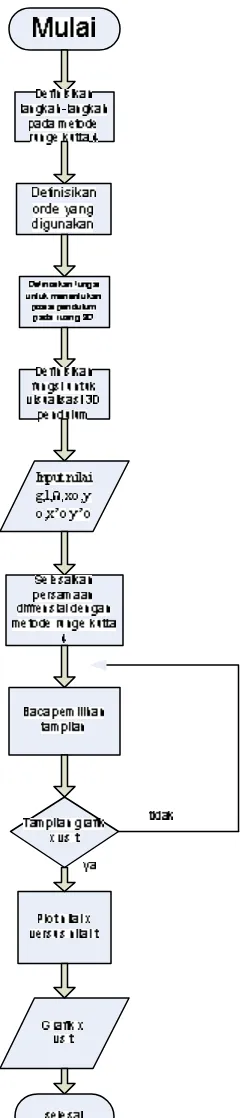
Gambar 3.2. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Unutk grafik posisi x vs posisi y.
25
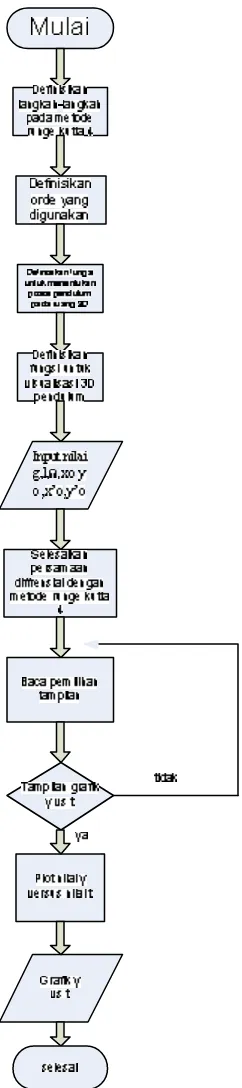
Gambar 3.3. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Unutk grafik posisi x vs posisi y.
26
Gambar 3.4. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Unutk grafik posisi x vs posisi y.
27
Gambar 4.1. Hasil Eksekusi Program pada Lampiran A
29
Gambar 4.2. Hasil Eksekusi Program pada Lampiran B
30
Gambar.4.3. Grafik hasil simulasi persamaan gerak pendulum Foucault berupa
Pola lintasan gerakan ayunan pendulum pada posisi x terhadap
Posisi y
32
Gambar. 4.4. Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
Kutub utara, berupa ayunan posisi x terhadap t (waktu)
33
Gambar. 4.5. Grafik hasil simulasi persamaan gerak pendulum Foucault berupa
Pola lintasan gerakan ayunan pendulum pada posisi x terhadap
Posisi y
34
Posisi y
34
Gambar. 4.7. Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
kota Medan, berupa ayunan posisi y terhadap t (waktu)
35
Gambar. 4.8. Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
kota Jakarta, berupa ayunan posisi y terhadap t (waktu)
36
Gambar 4.9. Grafik hasil simulasi persamaan gerak pendulum Foucault
di kota Pontianak berupa pola lintasan gerakan ayunan
pendulum pada posisi x terhadap Posisi y.
37
Gambar. 4.10.Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
ABSTRAK
SIMULATION OF FOUCAULT PENDULUM BY USING MATHEMATICA 6
ABSTRACT
BAB 1
PENDAHULUAN
1.1.
Latar Belakang
Salah satu akibat dari rotasi bumi adalah adanya efek coriolis. Efek Coriolis melekat pada fenomena defleksi (pembelokkan arah) gerak sebuah benda pada sebuah kerangka acuan yang berputar, khususnya di permukaan bumi. Hal ini dapat dijelaskan bahwa sebuah benda yang bergerak lurus dalam kerangka yang berputar, akan berbelok oleh pengamat yang diam di dalam kerangka tersebut. Efek Coriolis ini sangat berpengaruh pada bidang aerodinamika, atau dengan kata lain efek Coriolis merupakan salah satu teori dalam bidang ilmu mekanika yang perlu dipelajari. Salah satu untuk menganalisis adanya efek coriolis adalah dengan ayunan bandul yang dapat berputar terhadap sumbu vertikalnya yang diberi nama pendulum Foucault.
Pendulum Foucault di demonstrasikan pertama kali oleh fisikawan Prancis Jean Leon Foucault pada tahun 1851 di Paris. Foulcault menggantungkan sebuah bola cannon dari langit-langit kubah Pantheon dengan kawat yang panjangnya 250 kaki, dan masing-masing ayunan bandul membentuk pola pada lantai berpasir dan bidang ayunan bandul ditemukan bergeser searah jarum jam. Hal ini dapat dijelaskan bahwa pola pada lantai berpasir di bawah pendulum berubah karena ayunan bandul yang bergerak bebas tidak dapat mengubah bidang ayunnya. Berdasarkan penelitian selanjutnya dari pendulum Foucault ini, didapati bahwa pola ayunan dari pendulum Foucault ini berbeda-beda bergantung pada sudut lintang tempat diadakannya eksperimen pendulum Foucault.
numeric. Adapun metode numeric yang dipilih dalam menyelesaikan persamaan differensial pendulum Foucault adalah metode Euler. Metode ini digunakan karena keuntungannya yang mudah dalam pemrograman.
Adapun perangkat lunak yang digunakan pada simulasi ini adalah Mathematica versi 6. Digunakanya Mathematica versi 6 karena merupakan perangkat lunak untuk komputasi numerik dengan kemampuan yang baik dalam perhitungan dan dapat memberikan tampilan GUI (Graphic User Interface) sehingga lebih mudah digunakan pengguna (User Friendly). Dengan simulasi ini diharapkan mampu memberi pemahaman yang jelas tentang efek coriolis.
1.2.
Tujuan Penelitian
Tujuan dar penelitian ini adalah:
1.
Menganalisis efek Coriolis pada sistem pendulum Foucault berdasarkan
grafik keluaran simulasi penyelesaian persamaan gerak pendulum Foucault
yang terbentuk dari pola gerakan yang dihasilkan oleh ayunan pendulum
Foucault.
2. Menggunakan metode Runge-Kutta orde 4 untuk menyelesaikan persamaan gerak pendulum Foucault yang berupa persamaan differensial orde 2.
3. Merancang program bantu untuk mensimulasikan penyelesaian persamaan gerak pendulum Foucault dengan menggunakan bahasa pemrograman Mathematica Versi 6.
1.3.
Manfaat Penelitian
1.4.
Batasan Masalah
1.
Model yang digunakan yaitu pendulum sederhana dengan frekuensi alami
pendulum,
Hzl g
1
=
, frekuensi rotasi bumi, =1/24, dan kondisi awal
pendulum, x = 2 m, y = 2 m.
2.
Perbandingan pola lintasan didasarkan pada variasi sudut lintang. Titik
yang diambil yaitu pada kutub bumi (90
o), khatulistiwa (0
o), dan
sembarang tempat antara kutub bumi dan khatulistiwa; Medan (3
o) dan
Jakarta (6
o).
3. Penyelesaian persamaan differensial pendulum sederhana teredam dan terkendali dengan menggunakan metode Rungge-Kutta orde 4.
4. Simulasi dilakukan dengan menggunakan bahasa pemrograman Mathematica versi 6.
5. Animasi pendulum Foucault sebagai pendukung visualisasi dilakukan dengan menggunakan bahasa pemrograman Visual Basic.
1.5.
Sistematika Penulisan
Laporan tugas akhir ini disusun dalam lima bab yaitu sebagai berikut: Bab I Pendahuluan
Bab ini menjelaskan latar belakang penelitian, tujuan penelitian, batasan masalah, metodologi penelitian dan sistematika penulisan.
Bab II Tinjauan Pustaka
Bab ini menjelaskan landasan teori yang digunakan dalam penelitian, yaitu dasar teori pendulum Foucault, dan Metode Rungge-Kutta yang digunakan untuk mengolah informasi yang akan diimplementasikan dalam simulasi.
Bab ini membahas penyelesaian masalah yang akan disimulasi, dan algoritma program yang akan digunakan.
Bab IV Hasil dan Pembahasan
Bab ini memberikan hasil uji coba simulasi dengan membandingkan pola lintasan yang didasarkan pada sudut variasi sudut lintang. Titik yang diambil yaitu pada kutub bumi (90o), khatulistiwa (0o), dan sembarang tempat antara kutub bumi dan khatulistiwa; Medan (3o) dan Jakarta (6o).
Bab V Kesimpulan dan saran
Bab ini memberikan kesimpulan dari hasil perancangan program yang telah dilakukan dan juga memberikan saran-saran untuk penelitian selanjutnya.
BAB 2
TINJAUAN PUSTAKA
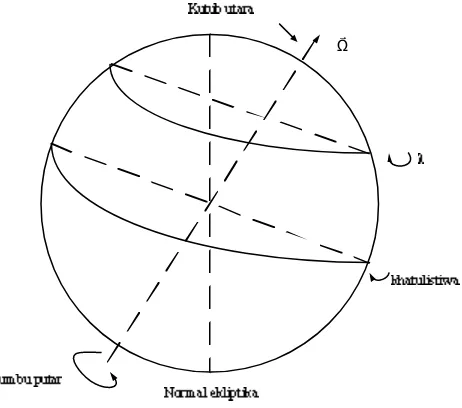
2.1. Rotasi Bumi
Rotasi adalah perputaran benda pada suatu
sumbu
yang tetap, misalnya
perputaran
gasing
dan perputaran
planet
Bumi
pada
sumbunya
. Pada rotasi bumi,
gerak rotasi ini terjadi pada garis/poros/sumbu utara-selatan (garis tegak dan sedikit
miring ke kanan). Adapun kecepatan rotasi bumi dapat dihitung sesuai dengan
persamaan 2.1.
v = 2?r
Bumicos ?/24
(2.1)
Bab ini membahas penyelesaian masalah yang akan disimulasi, dan algoritma program yang akan digunakan.
Bab IV Hasil dan Pembahasan
Bab ini memberikan hasil uji coba simulasi dengan membandingkan pola lintasan yang didasarkan pada sudut variasi sudut lintang. Titik yang diambil yaitu pada kutub bumi (90o), khatulistiwa (0o), dan sembarang tempat antara kutub bumi dan khatulistiwa; Medan (3o) dan Jakarta (6o).
Bab V Kesimpulan dan saran
Bab ini memberikan kesimpulan dari hasil perancangan program yang telah dilakukan dan juga memberikan saran-saran untuk penelitian selanjutnya.
BAB 2
TINJAUAN PUSTAKA
2.1. Rotasi Bumi
Rotasi adalah perputaran benda pada suatu
sumbu
yang tetap, misalnya
perputaran
gasing
dan perputaran
planet
Bumi
pada
sumbunya
. Pada rotasi bumi,
gerak rotasi ini terjadi pada garis/poros/sumbu utara-selatan (garis tegak dan sedikit
miring ke kanan). Adapun kecepatan rotasi bumi dapat dihitung sesuai dengan
persamaan 2.1.
v = 2?r
Bumicos ?/24
(2.1)
putar bumi, bukan terhadap titik pusat bumi. Seperti yang telah diketahui bahwa rBumi pada khatulistiwa sama dengan 6375 km, sehingga kecepatan bumi berdasarkan persamaan 2.1 yaitu sebesar 1669 cos ? km/jam. Jika diambil posisi pada garis khatulistiwa, atau pada ? = 0 maka akan diperoleh kecepatan bumi sebesar 463 meter per detik yang ternyata sudah melampaui besar kecepatan suara di udara. Pengaruh dari rotasi bumi ini secara garis besar, yaitu:
a. Pergantian Siang dan malam b. Perbedaan waktu
c. Perbedaan percepatan gravitasi bumi d. Pembelokan arah angin
e. Pembelokan arus laut
f. Peredaran semu harian benda-benda langit
Salah satu cara untuk menganalisa rotasi bumi beserta pengaruhnya adalah dengan menggunakan pendulum Foucault (akan dijelaskan lebih lanjut pada subbab 2.3). (Pikatan, 2009)
Ωr
Gambar 2.1. Rotasi Bumi
Gaya Coriolis adalah suatu proses alam yang dinamakan sesuai dengan penemunya yaitu Gaspard Gustave Coriolis (1844) dari Prancis. Ia menemukan bahwa rotasi bumi selalu menyebabkan simpangan terhadap setiap gerakan yang terjadi pada permukaan bumi. Besar kecilnya penyimpangan tergantung dari lintang geografi, dimana gerakan itu terjadi.
Pada belahan bumi utara setiap gerak di belokkan ke kanan dan pada belahan bumi selatan di belokkan ke kiri dari arah kecepatan. Pembelokkan atau perubahan arah ini hanya dapat di terangkan dengan menganggap atau menambahkan adanya gaya tidak
nyata yang bekerja pada suatu benda. Gaya khayal atau gaya fiktif ini dinamakan gaya coriolis. Gaya semacam ini yang bekerja pada satu satuan massa atau percepatan yang ditimbulkan disebut percepatan coriolis.
Besarnya percepatan coriolis secara matematis dapat dinyatakan sebagai berikut.
φ
sin
2
Ω
=
v
a
c (2.2)v adalah kecepatan benda yang bergerak, ? kecepatan sudut rotasi bumi yang besarnya sama dengan
7
,
27
x
10
−5rad
/
s
, ? besarnya derajat lintang. Dari persamaan tersebut di atas dapat dilihat bahwa untuk kecepatan yang sama pengaruh coriolis terbesar terdapat di kutub. Pengaruh ini makin berkurang dengan berkurangnya lintang tempat dan sama dengan nol di khatulistiwa.
Sering pula persamaan di atas ditulis:
vf
a
c=
denganf
=
2
Ω
sin
φ
(2.3)f dinamakan parameter coriolis.
Arah percepatan coriolis ialah tegak lurus pada kecepatan, ke kanan di belahan bumi utara dan ke kiri di belahan bumi selatan. (Susilo Prawirowardoyo,1996).
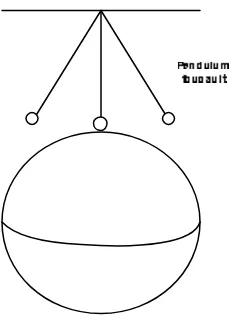
Pendulum Foucault adalah suatu alat yang berguna untuk menunjukkan arah rotasi bumi. Alat ini ditemukan oleh Jean Bernard Léon Foucault. Alat eksperimen ini terdiri atas bandul panjang yang bebas bergerak kesana kemari pada latar vertikal. Diagram dari pendulum Foucault diberikan pada gambar 2.2.
Gambar 2.2 pendulum Foucault
Pertunjukan pertama bandul Foucault kepada khalayak terjadi pada bulan Februari
1851 di Ruang Meridian yang ada di Observatorium Paris. Beberapa minggu kemudian, Léon
Foucault membuat bandul terkenalnya ketika ia menggantung potongan logam seberat 28 kg
dengan kabel sepanjang 67 meter dari kubah Panthéon di Paris. Hal itu untuk membuktikan
bahwa bumi berputar pada porosnya. Pesawat osilasi dari pendulum Foucault berputar
sepanjang hari sebagai akibat dari rotasi bumi. Pesawat osilasi menyelesaikan seluruh
lingkaran dalam interval T, yang tergantung pada lintang geografis.
ini selanjutnya digunakan untuk menganalisis rotasi bumi pada porosnya, dengan
bandul yang cukup berat yang digantungkan pada tali panjang, agar dapat bertahan
berayun-ayun cukup lama. Oleh rotasi bumi, tentunya bandul akan berosilasi karena seolah-olah
tertinggal oleh rotasi bumi. Untuk menyelidiki gerakan bandul yang memperlihatkan adannya
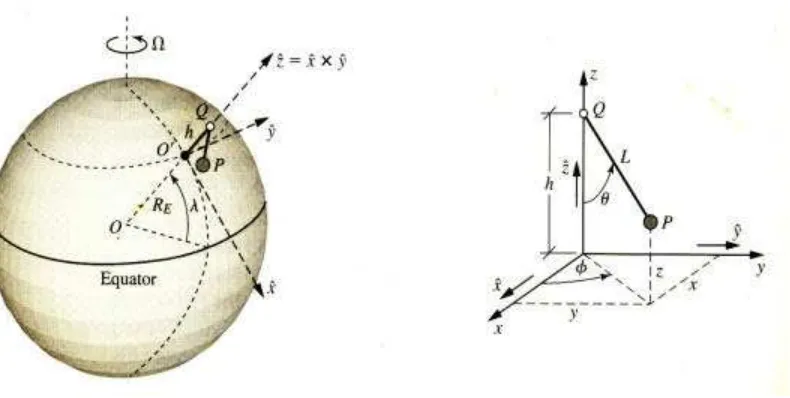
Gambar 2.3 Pendulum yang menunjukkan rotasi bumi.
pendulum yang terdiri dari partikel P dengan massa dan kawat (diperkirakan tak bermassa ) panjang, dan yang menyangga pada titik Q dekat lintang permukaan bumi seperti yang ditunjukkan pada gambar 2.3 untuk mempermudah, jarak vertikal h antara titik O ',yang mana pada permukaan bum, penyangga pada Q adalah diambil menjadi h=L.
Skala dari gambar 2.3 terlalu dibesarkan dengan diasumsikan panjang L dari pendulum terlalu kecil dari radius
R
E di bumi, dengan bumi yang homogen sebagai massaM
E. Hal ini juga diasumsikan bahwa gaya pada P adalah tegangan tali QP, besarnya N dan gayagravitasi bumi. Besarnya gaya gravitasi yang
bekerja pada P ini diperkirakan sebagai
GM
Em
/
R
2E=
mg
,dimana g = 9,81 m/s2 adalah percepatan gravitasi di permukaan bumi. Dan juga karena L sangat kecil dibandingkan dengan
R
E, gaya gravitasi yang bekerja pada P dinyatakan dalam arah −zˆdimana zˆadalah sebuah vektor satuan yang diarahkan ke atas sepanjang gatis vertikal OO’. Koordinar rectangular x, y, dan z ditunjukkan pada gambar 2.3 digunakan untuk menganalisis efek ? sebagai gaya pendulum yang bergerak relatif terhadap bumi.Istilah partikel yang diam di bumi dinyatakan dalam vektor satuan
(
x
ˆ
,
y
ˆ
,
z
ˆ
=
x
ˆ
×
y
ˆ
)
yang ditunjukkan pada 2.3 dengan resultan gaya Fr
(
)
+
+
−
−
−
=
−
−
≈
L
z
L
z
y
y
x
x
N
z
mg
QP
QP
N
z
mg
F
ˆ
ˆ
ˆ
ˆ
ˆ
r
(2.4)
Dimana x, y dan z adalah koordinat rectangular dengan P adalah titik axis pada permukaan
bumi dan titik tengah di O’. perhatikan bahwa, panjang pendulum L adalah konstan, variabel
x, y dan z din yatakan dengan persamaan:
(
)
2 22 2 L L z y
x + + − =
Dengan ? menjadi lokasi lintang titik O’ di bumi, dengan kecepatan angular
ω
v
dari{
x
ˆ
,
y
ˆ
,
z
ˆ
}
yang ditunjukkan pada gambar 2.3(
λ
λ
)
ω
r
≈
Ω
z
ˆ
sin
−
x
ˆ
cos
(2.5)dimana ? = 2p rad/hari ≈7,27.10-5 rad/s. Pada persamaan 2.5 rotasi garis dari matahari ke pusat O di bumi. Dengan kecepatan angular 2p rad/tahun. Diabaikan karena lebih kecil ? di sekitar titik pusat bumi. Dengan posisi vektor bumi dari O’ ke P dinyatakan sebagai
z
z
y
y
x
x
P
O
'
=
ˆ
+
ˆ
+
ˆ
dan di pusat O di bumi sekarang pada kerangka inersia. Posisi vektor sebenarnya dari P adalah:z z y y x x z R
Oleh karena itu, kecepatan υrp dan percepatan arp di P adalah:
p p
p
x
x
y
y
z
z
r
dt
r
d
r
r
&
&
&
r
r
×
+
+
+
=
=
ω
υ
ˆ
ˆ
ˆ
=
(
x
&
−
Ω
y
sin
λ
)
x
ˆ
+
[
y
&
+
Ω
x
sin
λ
+
Ω
(
R
E+
z
)
cos
λ
] (
y
ˆ
+
z
&
−
Ω
y
cos
λ
)
z
ˆ
(2.6) { } p z y x p p p dt d dt d
a υ υ ωr υv
r r r × + = = ˆ , ˆ , ˆ
(
)(
)
[
]
(
)
(
)
(
)
[
z
y
x
R
z
]
z
y
y
z
x
y
x
z
R
y
x
E Eˆ
cos
cos
sin
cos
2
ˆ
cos
2
sin
2
ˆ
cos
sin
sin
2
2 2 2 2 2λ
λ
λ
λ
λ
λ
λ
λ
λ
+
Ω
−
Ω
−
Ω
−
+
Ω
−
Ω
+
Ω
+
+
+
Ω
−
Ω
−
=
&
&
&
&
&
&
&
&
&
&
(2.7)Dengan F
r
dan arp sebenarnya ditunjukkan pada persamaan 2.4 dan 2.7 di bawah ini adalah persamaan skalar yang diperoleh langsung dari
F
m
a
r
pv
=
(
)(
)
[
]
NL x z R x y x
m&&−2Ω&sin λ−Ω)2 sin2λ−Ω2 E + sinλ cosλ =−
(2.8)
(
)
NL y y z x y
m + Ω + Ω −Ω2 =−
cos 2 sin
2 & λ & λ &
&
(2.9)
(
)
(
)
[
]
NL L z mg z R x y z m E − − − = + Ω − Ω − Ω
− λ 2 λ λ 2 2λ
Persamaan 2.8 sampai 2.10 di subsitusikan ke persamaan 2.5 yang mempengaruhi gaya dari pendulu m relatif terhadap perputaran bumi. Efek dari ? sangat kecil pada gerakan pendulum dan sekarang dibahas secara rinci. dimana ? = 2p rad/hari ≈7,27.10-5 rad/s sangat kecil, perkiraan sekarang dibuat untuk mengurangi kompleksitas pada persamaan 2.8 sampai 2.10 tapi masih mempertahankan efek ? tentunya. Karena ayunan cukup kecil, gerakan pendulum boleh dikatakan berada pada bidang datar, maksudnya komponen gerakan ke atas dan ke bawahnya boleh diabaikan yang berarti
z
&
danz
&
&
adalah 0.Maka persamaan pendulum Foucault adalah ditunjukkan pada persamaan 2.11 dan 2.12.
0 sin
2Ω + =
− x
L g y x& &
& λ (2.11)
0 sin
2Ω + =
+ y
L g x y& &
& λ (2.12)
Persamaan 2.11 dan 2.12 diatas menghubungkan gerakan-gerakan sepanjang sumbu x dan sepanjang sumbu y yang berarti menentukan bentuk lintasan pendulum.(Marcelo da Silva,2004)
2.4. Metode Runge-Kutta
Salah satu metode numerik yang digunakan dalam penyelesaian persamaan differesial adalah metode Runge-Kutta. Metode ini mencapai ketelitian suatu pendekatan deret Taylor tanpa memerlukan kalkulasi turunan yang lebih tinggi. Banyak perubahan terjadi, tetapi semuanya dapat ditampung dalam bentuk umum dari persamaan 2.13
yi+1 = yi + f(xi, yi, h) h (2.13)
f = a1 k1 + a2 k2 + … + an kn (2.14) dimana setiap a adalah konstanta dan setiap k besarnya adalah persamaan-persamaan 2.15.
k1 = f(xi , yi )
k2 = f(xi + p1h, yi + q11 k1h)
k3 = f(xi + p2h, yi + q21 k1h + q22k2h) (2.15)
M
kn = f(xi + pn-1h, yi + qn-1,1 k1h + qn-1,2 k2h + ...+ qn-1,n -1 kn-1h)
Semua harga k berhubungan secara rekurensi. Artinya k1 muncul dalam persamaan untuk k 2, yang muncul lagi dalam persamaan untuk k3, dan seterusnya. Rekurensi ini membuat metode RK efisien untuk kalkulasi oleh komputer (Raymond et al, 1991).
Berbagai jenis metode Runge-Kuttadapat direncanakan dengan melaksanakan jumlah suku-suku yang berbeda pada fungsi tersebut seperti dinyatakan oleh n. untuk n = 1 atau RK orde pertama ternyata adalah metode Euler, yaitu persamaan 2.16.
y1 = y0+ h f(x0,y0) (2.16) Dalam deret Taylor didapatkan persamaan 2.17.
...
)
,
(
'
2
)
,
0 02
0 0 0
0
0
=
+
=
+
+
f
x
y
+
!
h
y
h f(x
y
h)
y(x
y
(2.17)x
h
k
y
k
y
h
x
hf
k
hf(x , y)
k
∆
=
=
∆
+
+
=
=
dengan
,
2
1
,
2
1
2 1 2 1 (2.18)Metode RK orde tiga diberikan oleh persamaan-persamaan 2.19.
)
4
(
6
1
)
2
,
(
2
1
,
2
1
3 2 1 1 2 3 1 2 1k
k
k
y
k
k
y
h
x
hf
k
k
y
h
x
hf
k
hf(x , y)
k
+
+
=
∆
−
+
+
=
+
+
=
=
(2.19)Metode RK orde empat diberikan oleh persamaan-persamaan 2.20.
y
x
y
h
x
y
k
k
k
k
y
k
y
h
x
hf
k
k
y
h
x
hf
k
k
y
h
x
hf
k
hf(x , y)
k
∆
+
=
+
+
+
+
=
∆
+
+
=
+
+
=
+
+
=
=
)
(
)
(
)
2
2
(
6
1
)
,
(
2
1
,
2
1
2
1
,
2
1
4 3 2 1 3 4 2 3 1 2 1 (2.20)Sedangkan untuk menyelesaikan persamaan differensial orde dua digunakan metode RK orde empat dengan terlebih dahulu membuat permisalan. Ditinjau persamaan differensial orde dua seperti pada persamaan 2.21.
Dengan y(x0) = y0, dan y’(x0)= y0’ . Persamaan 2.19. dibuat permisalan sehingga diperoleh persamaan-persamaan 2.22. ) , , ( ) , ,
(x y y f x y z f y z dx dz z y dx dy = ′ = ′′ = ′ = = ′ = (2.22)
Persamaan-persamaan 2.16. merupakan persamaan-persamaan simultan yang dapat juga dituliskan sebagai f1(x,y,z)=z dan f2(x,y,z)=f(x,y,z). Berdasarkan persamaan-persamaan 2.16 tersebut, persamaan differensial orde tersebut diselesaikan dengan mengikuti aturan metode RK orde empat pada persamaan 2.14 (Kandasamy et al,1997).
Contoh Runge kutta:
0
'"
+
xy
+
y
=
y
dengany
( )
0
=
1
;
y
'( )
0
=
1
;
y
( )
0
,
1
=
y
1
''
"
xy
y
z
y
=
−
−
=
z
y
'=
(
x y z)
f z dx dy , , 1 = =
(
x
y
z
)
f
y
xz
dx
y
d
,
,
2 2 2=
−
−
=
Dengan memberikan nilai awal y0 =1,z0 =y'0 =0 maka:
(
0,
0,
0)
0
,
1
1(
0
,
1
,
0
)
0
,
1
( )
0
0
11
=
hf
x
y
z
=
f
=
=
k
(
0,
0,
0)
0
,
1
2(
0
,
1
,
0
)
0
,
1
(
( )( ) ( )
0
0
1
)
0
,
1
( )
1
0
,
1
21
=
hf
x
y
z
=
f
=
−
−
=
−
=
−
l
+ + += 1 0 0 1 0 1
( )
( )
( )
(
)
+ + + −= 0,1
2 1 0 , 0 2 1 1 , 1 , 0 2 1 0 1 , 0 f1
=0,1f1
(
0,05,1,0,005)
005 , 0
2 =−
k
+
+
+
=
2 0 0 1 0 12
2
1
,
2
1
,
2
1
l
z
k
y
h
x
hf
l
(
0.05,1, 0.005)
1,
0 2 −
= f
09975 , 0
2 = −
l + + +
= 1 0 0 2 0 2
3 2 1 , 2 1 , 2 1 l z k y h x hf k
(
0.05,0.9975, 0.0499)
1,
0 1 −
= f = -0.00499
+
+
+
=
2 0 0 2 0 23
2
1
,
2
1
,
2
1
l
z
k
y
h
x
hf
l
(
0.05,0.9975, 0.0499)
1,
0 2 −
= f
= -0.09950
(
0 0 3 0 3)
1
4
hf
x
h
,
y
k
,
z
l
k
=
+
+
+
= -0.00995
(
0 0 3 0 3)
2
4
hf
x
h
,
y
k
,
z
l
l
=
+
+
+
(
0.1,0.99511, 0.0995)
1,
0 2 −
= f
= -0.0985
(
0
.
1
,
0
.
99511
,
0
.
0995
)
1
,
0
1−
y
y
y
=
+
∆
∴
1 0=
[
0 2(
0.005) (
2 0.00499)
0.00995]
21
1+ + − + − −
= 0.9950
2.5 Mathematica 6
Mathematica adalah pemograman komputer yang dapat di kerjakan dengan matematika. Mathematica sering digunakan untuk instruksi, pekerjaan rumah, riset, dan penulisan. Mathematica cocok digunakan untuk numerik dan kemampuan dalam proses pemrograman sangat baik. Mathematica dapat juga dipakai sebagai pemodelan, perhitungan intensif, proyek disertasi, dan lain sebagainya.
Elemen dasar :
A. Membuka paket Mathematica 6
a. Cari ikon Mathematica 6, kemudian klik dengan cepat dua kali, jendela kerja Mathematica 6 muncul.
b.
Perintah (Command) dari Mathematica 6 di tuliskan dengan memakai
symbol
Matematika.
c.
Setelah selesai menggunakan Mathematica 6, ketik quit dan [enter], atau
klik file/EXIT
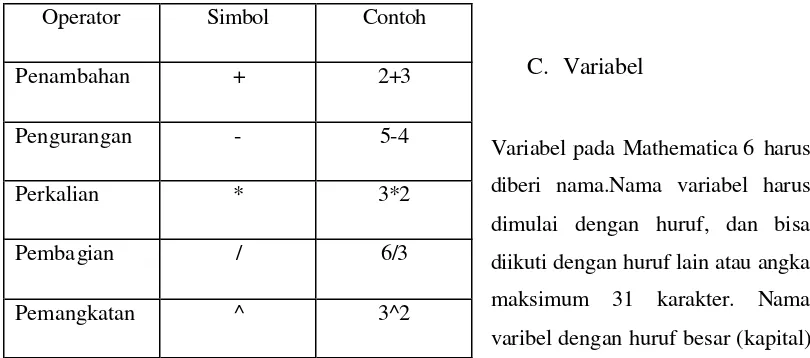
Tabel 2.1 Operator Mathematica
C.
Variabel
Variabel pada Mathematica 6 harus diberi nama.Nama variabel harus dimulai dengan huruf, dan bisa diikuti dengan huruf lain atau angka maksimum 31 karakter. Nama varibel dengan huruf besar (kapital) dianggap berbeda dengan nama variabel yang ditulis dengan huruf kecil.
D.
konstanta/tetapan
Beberapa tetapan yang berlaku pada Mathematica adalah sebagai berikut:
pi nilai p = 3,14452…
eps nilai epsilon, bilangan natural e = 2.71828
inf nilai tak berhingga ~
E.
Tanda baca
% Digunakan untuk mengawali komentar (command)
Operator Simbol ContohPenambahan + 2+3
Pengurangan - 5-4
Perkalian * 3*2
Pembagian / 6/3
, digunakan untuk memisahkan dua pernyataaan dalam sebaris
; digunakan untuk memisahkan dua pernyataan tanpa echo
… digunakan untuk melanjutkan statemen ke baris berikutnya.F. Kontrol Program
Mathematica 6 menyediakan beberapa instruksi yang memugkinkan pengguna membuat program atau fungsi, antara lain instruksi pemilihan (seleksi) dan instruksi perulangan (loop)
Instruksi seleksi:
a. Pemilihan bersyarat:
if (syarat-1)
instruksi-1
else if
instruksi-2
else
instruksi-3
end.
Pemilihan diatas digunakan untuk memilih satu diantara beberapa instruksi sesuai
dengan syarat yang dipenuhi. Bila syarat 1 dipenuhi maka laksanakan instruksi 1 , bila
syarat 2 dipenuhi, maka laksanakan instruksi 2 bila tidak ada syarat yang dipenuhi
maka laksanakan instruksi-3.
b. Pemilihan kasus
switch variabel
case 1 {nilai-1} instruksi-1
case 2 {nilai-2} instruksi-2
case 3 {nilai-3} instruksi-3
…
Instruksi seleksi ini akan memilih satu instruksi berdasarkan nilai yang diberikan pada
variabel. Bila nilainya adalah nilai -1 maka instruksi 1 dilaksanakan. Bila nilainya
adalah 2 maka instruksi 2 yang dilaksanakan. Bila nilainya adalah 2 maka instruksi 2
yang dilaksanakan.
Instruksi perulangan
a. Perulangan dengan
for
for var = n1:n2:n3instruksi- instruksi
end
contoh:
For[i=0,i<4,i++,Print[i]]
0
1
2
3
………
For[i=1;t=x,i^2<10,i++,t=t^2+i;Print[t]]
1+x
22+(1+x^2)
23+(2+(1+x^2)^2)
2Perulangan yang dibatasi oleh nilai var, mulai dari n1 hingga n3 dengan
perubahan nilai sebesar n2 pada setiap putaran. Apakah n2=1 maka n2 tidak perlu
ditulis, sehingga bentuknya menjadi:
end
b. Perulangan denganWhile
while (syarat)
insruksi- instruksi
end
Perulangan yang ditentukan oleh suatu syarat. Selama syarat terpenuhi maka
perulangan akan berlangsung. (Wolfram,1991).
BAB 3
ANALISIS MASALAH DAN PERANCANGAN PROGRAM
3.1. Analisis Masalah
3.1.1. Persamaan Gerak Pendulum Foucault
Pada subbab ini akan dijelaskan persamaan pendulum Foucault yang akan diselesaikan yaitu persamaan 3.1 dan 3.2.
0 sin
2Ω + =
− x
L g y x& &
& λ (3.1)
0 sin
2Ω + =
+ y
L g x y& &
& λ (3.2)
Dimana:
end
b. Perulangan denganWhile
while (syarat)
insruksi- instruksi
end
Perulangan yang ditentukan oleh suatu syarat. Selama syarat terpenuhi maka
perulangan akan berlangsung. (Wolfram,1991).
BAB 3
ANALISIS MASALAH DAN PERANCANGAN PROGRAM
3.1. Analisis Masalah
3.1.1. Persamaan Gerak Pendulum Foucault
Pada subbab ini akan dijelaskan persamaan pendulum Foucault yang akan diselesaikan yaitu persamaan 3.1 dan 3.2.
0 sin
2Ω + =
− x
L g y x& &
& λ (3.1)
0 sin
2Ω + =
+ y
L g x y& &
& λ (3.2)
Dimana:
g = kecepatan gravitasi (
2 /sm
)
L = panjang pendulum ( m ) ? = lintang geografis (rad)
Pendulum Foucault ini pada dasarnya adalah pendulum sederhana yang dapat
dimodelkan sebagai titik massa yang berayun pada tali yang panjangnya L. Pendulum
berada di lintang geografis ?. Pola gerak pendulum Foucault melibatkan dua osilasi,
pada skala yang berbeda besarnya. Pada skala kecil ada ayunan pendulum, yang akan
saya sebut sebagai 'getaran'. Pada skala besar ada rotasi keseluruhan bumi sekitar
porosnya. getaran berpartisipasi dalam rotasi keseluruhan dan terpengaruh olehnya.
Karena perbedaan yang besar dalam periode osilasi efeknya sangat kecil selama setiap
ayunan terpisah. Tampaknya harus diabaikan, tetapi itu sebenarnya penting karena
pengaruhnya kumulatif.
Dalam penyelesaikan persamaan 3.1 dan 3.2 dengan menggunakan metode
runge kutta orde 4 maka harus ditentukan kondisi awal dari pendulum Foucault.
Adapun kondisi awal untuk penelitian ini ditentukan sebagai berikut:
1.
Percepatan grafitasi bumi,
g
yang digunakan sebesar 9.8 m/s
2.
2.
Panjang Tali,
L
sebesar 10 m.
3.
Nilai x
o = 2 m4.
Nilai y
o = 2 m5.
Frekuensi rotasi bumi,
?
ditentukan sebesar 1/24.
6.
Sudut lintang, ? dapat divariasikan.
3.1.2. Penyelesaian Persamaan Gerak Pendulum Foucault dengan Metode Runge-Kutta
Orde Empat
u dt dx = v dt dy = (3.3)
(
t
x
v
)
g
v
x
l
g
dt
du
,
,
sin
2
Ω
=
+
−
=
λ
(
t
y
u
)
g
u
y
l
g
dt
dv
,
,
sin
2
Ω
=
+
−
=
λ
Dengan
f
1(
t
,
x
,
u
)
=
u
;f
2(
t
,
y
,
v
=
v
)
;g
1(
t
,
x
,
v
) (
=
g
t
,
x
,
v
)
;g
2(
t
,
y
,
u
) (
=
g
t
,
y
,
u
)
.Dengan memberikan syarat awal xo, yo,uo dan vo pada persamaan 3.3 di atas
Maka akan diperoleh kecepatan translasi dan simpangan pada setiap saat. Dan untuk menyelesaikan set persamaan 3.3 digunakan langkah-langkah sebagai berikut:
k, l, p dan q = koefisien-koefisien penyelesaian dari persamaan pendulum Foucault dengan menggunakan runge-kutta orde 4.
(
n n n)
n
f
t
x
u
k
1=
1,
,
(
n n n)
n
g
t
x
v
l
1=
1,
,
+
+
+
=
n n n n nn
f
t
h
x
k
u
l
k
2 1 1 12
1
,
2
1
,
2
1
+
+
+
=
n n n n nn
g
t
h
x
k
v
l
l
2 1 1 12
1
,
2
1
,
2
1
+
+
+
=
n n n n nn
f
t
h
x
k
u
l
k
3 1 2 2
+
+
+
=
n n n n nn
g
t
h
x
k
v
l
l
3 1 2 22
1
,
2
1
,
2
1
+
+
+
=
n n n n nn
g
t
h
x
k
v
l
l
4 1 3,
22
1
,
Dan
(
n n n)
n
f
t
y
v
p
1=
2,
,
(
n n n)
n
g
t
y
u
q
1=
2,
,
+
+
+
=
n n n n nn
f
t
h
y
p
v
q
p
2 2 1 12
1
,
2
1
,
2
1
+
+
+
=
n n n n nn
g
t
h
y
p
u
q
q
2 2 1 12
1
,
2
1
,
2
1
+
+
+
=
n n n n nn
f
t
h
y
p
v
q
p
3 2 2 22
1
,
2
1
,
2
1
(3.5)
+
+
+
=
n n n n nn
g
t
h
y
p
u
q
q
3 2 2 22
1
,
2
1
,
2
1
+
+
+
=
n n n n nn
g
t
h
x
p
v
q
q
4 2 3,
22
1
,
Setelah mendapatkan harga-harga k, l, p, dan q pada persamaan 3.4. dan 3.5 maka selanjutnya dihitung nilai-nilai x, u, y, dan v.
(
n n n n)
n
n x h k k k k
x 1 1 2 2 2 3 4
2 1 + + + + = + + + +
= n n n n n
n f t h x k u l
k4 1 3 , 3
2 1 , + + +
= n n n n n
n f t h x p v q
p4 2 3 , 3
(
n n n n)
nn u h q q q q
u 1 1 2 2 2 3 4
2 1
+ + +
+ =
+
(3.6)
(
n n n n)
n
n y h p p p p
y 1 1 2 2 2 3 4
2
1 + + +
+ =
+
(
n n n n)
n
n v hl l l l
v 1 1 2 2 2 3 4
2 1
+ + + +
=
+
3.2. Perancangan Program
Simulasi gerak pendulum foucault ini dirancang dengan menggunakan bahasa pemrograman Mathematica Versi 6 pada seperangkat Notebook yang berprosesor Intel Pentium dual Core.
Adapun Proses perancangan program penelitian ini dirancang melalui tahapan-tahapan sebagai berikut:
a.
Perancangan diagram alir (flowchart) dan algoritma simulasi penyelesaian persamaan gerak pendulum sederhana nonlinier teredam dan terkendali dengan metode Runge-Kutta orde 4.b.
Pembuatan program lengkap berdasarkan rancangan diagram alir dan algoritma dengan menggunakan bahasa pemrograman Mathematica Versi 6.Gambar 3.1. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Gambar 3.2. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Gambar 3.3. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Gambar 3.4. Diagram Alir Simulasi persamaan gerak pendulum Foucault
Unutk grafik posisi x vs posisi y.
Adapun algoritma program bantu yang digunakan dalam penyelesaian persamaan gerak pendulum dengan metode Runge-Kutta orde 4 adalah sebagai berikut:
INPUT
a.
G
=gravitasi bumi
b.
l
= panjang tali
c.
?
= rotasi bumi
d.
?
= sudut lintang
e.
Xo,Yo = koordinat titik pendulum
PROSES
a. Mendefinikan fungsi untuk menentukan koefisien-koefisien runge kutta 4. b. Menentukan orde yang digunakan pada metode runge kutta 4.
c. Mendefinikan fungsi untuk menentukan posisi dan visualisasi 3D dimana pendulum Foucault.
d. Membaca data masukan berupa percobaan gravitasi bumi, panjang tali, frekuensi rotasi buni, sudut lintang, dan kondisi awal pendulum.
e. Menyelesaikan persamaan pendulum Foucault dengan menggunakan metode runge kutta 4 yang di definisikan pada point a.
f. Menentukan posisi pendulum foucault pada tampilan 3D sesuai fungsi pada point c
OUTPUT
a. Hasil eksekusi ditampilkan dengan menekan tombol shift + enter. b. Menampilkan visualisasi 3D pendulum Foucault.
c. Memplot posisi x vs posisi y. d. Memplot posisi x vs posisi t. e. Memplot posisi y vs posisi t.
HASIL DAN PEMBAHASAN
[image:45.596.188.448.236.484.2]Pada Bab ini akan diberikan hasil visualisasi dan penyelesaian persamaan gerak pendulum Foucault . Adapun hasil eksekusi program untuk menampilkan bentuk visualisasi pada lampiran A ditunjukkan pada gambar 4.1
Gambar 4.1. Hasil Eksekusi Program pada Lampiran A
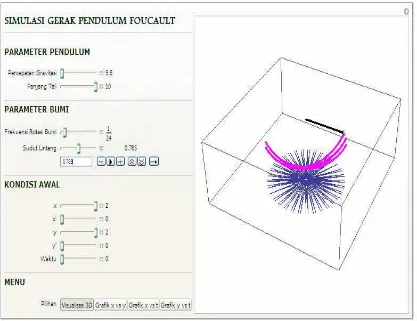
Gambar 4.2. Hasil Eksekusi Program pada Lampiran B
Hasil eksekusi program simulasi pada Lampiran B adalah berupa visualisasi 3D keluaran dari penyelesaian persamaan gerak pendulum Foucault berupa pola gerakan lintasan ayunan pendulum dengan metode Runge-Kutta orde 4 yang terintegrasi pada suatu tampilan GUI seperti yang ditunjukkan pada gambar 4.2. Visualisasi 3D ditampilkan untuk menampilkan bentuk tiga dimensi pada gerakan ayunan pendulum Foucault dengan koordinat x, y, dan z sebagai komponen-komponen pada arah-arah sumbu x dan sumbu y.
pendulum Foucault pada kutub disebut sebagai pendulum kutub, pendulum Foucault pada khatulistiwa disebut sebagai pendulum khatulistiwa, dan pendulum Foucault pada daerah di antara khatulistiwa dan kutub disebut sebagai pendulum Lintang. Pada Tabel 4.1. diberikan 3 kota besar di Indonesia sebagai titik uji variasi lintang.
Tabel.4.1. Kota-Kota Sebagai Titik Uji Varias i Lintang
Sudut Lintang Kota
Derajat Radian
Medan 3° U 0.0524
Pontianak 0o 0
Jakarta 6o S 0.1047
Kutub utara 90? ?U 1.5707
4.1. Pendulum Kutub
[image:48.596.108.466.390.548.2]Berikut ini akan diberikan grafik-grafik hasil simulasi gerak pendulum pada titik kutub utara, yaitu gambar 4.3.
Gambar.4.3. Grafik hasil simulasi persamaan gerak pendulum Foucault
di Kutub Utara berupa pola lintasan gerakan ayunan
pendulum pada posisi x terhadap Posisi y.
N= 360 sin ? (4.1) Dengan N merupakan sudut putaran pendulum Foucault. Untuk Kutub Utara,
N= 360o sin 90o = 360o (1) N= 360o
[image:49.596.109.469.285.427.2]Atau dengan kata lain, pendulum mengalami satu putaran penuh.
Gambar. 4.4. Grafik hasil simulasi persamaan gerak pe ndulum Foucault untuk
Kutub utara, berupa ayunan posisi x terhadap t (waktu)
Untuk grafik posisi x vs waktu(t) yang ditunjukkan gambar 4.4. terlihat bahwa osilasi dari pendulum Foucault yang merupakan osilasi skala kecil mengalami modulasi dengan rotasi bumi atau dengan kata lain osilasi pendulum berpartisipasi dalam rotasi keseluruhan dan terpengaruh olehnya. Dengan periode osilasinya ditunjukkan pada persamaan 4.2.
λ π sin 2 Ω = os
T (4.2)
Dengan Kutub Utara yang terletak pada sudut lintang 90o maka didapatkan periode osilasinya sebesar:
0 90 sin 24
/ 2
2
jam Tos
π
Dengan ? = 2p/24 jam
jam
T
os=
24
Adapun penjelasan tentang gerakan pendulum Foucault pada titik kutub utara ini dapat dituliskan sebagai berikut. Di kutub utara jelas terlihat saat berotasi akan membentuk lingkaran penuh 360 derajat selama 24 jam atau 15 derajat per jam. Bumi tidak hanya berotasi di bawah pendulum tetapi membawa pendulum dan titik uji lokasi membentuk lingkaran di pusat bumi. Rotasi bumi kemudian dapat di amati dalam kaitannya dalam ayunan pendulum. Di kutub utara ayunan pendulum terletak pada sumbu rotasi bumi. Maka pergerakan ayunan pendulum dengan rotasi bumi mengalami oposisi.
4.2. Pendulum Lintang
[image:50.596.108.432.400.573.2]
Gambar. 4.5. Grafik hasil simulasi persamaan gerak pendulum Foucault
di kota Medan berupa pola lintasan gerakan ayunan
Gambar. 4.6. Grafik hasil simulasi persamaan gerak pendulum Foucault
di kota Jakarta berupa pola lintasan gerakan ayunan
pendulum pada posisi x terhadap Posisi y.
Di lintang menengah rotasi bumi diamati dalam kaitannya dalam bidang ayunan pendulum tetapi waktu untuk mengamati rotasi bumi tergantung pada lintang lokasi. Waktu untuk mengamati putaran penuh sama dengan satu hari di Kutub Utara. Untuk waktu 24 jam, lintasan yang terbentuk tidak mencapai satu putaran penuh. Besar sudut putaran untuk kota Medan, yaitu:
N= 360o sin 3o = 360o (0.052) N= 18,84o
Hal ini dapat dilihat pada grafik posisi x terhadap posisi y yang terlihat pada gambar 4.5. Tampak pula bahwa sudut yang terbentuk 90o-? dibelahan bumi sebelah utara artinya negatif ( presesi searah jarum jam ) dengan mengambil posisi kota Medan 3° LU.
Sedangkan untuk kota Jakarta, besar sudut putarannya, yaitu: N= 360o sin 6o
Pada sudut lintang ini masih terdapat pengaruh rotasi bumi pada osilasi pendulum, hal ini ditunjukkan pada gambar 4.6. Tampak pula bahwa sudut yang terbentuk 90o+? dibelahan bumi sebelah selatan artinya positif ( presesi berlawanan arah jarum jam ) dengan mengambil posisi kota Jakarta 6o LS.
Gambar. 4.7. Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
kota Medan, berupa ayunan posisi y terhadap t (waktu)
Dengan mengambil posisi kota Medan yang terletak pada sudut 3o LU yang ditunjukkan pada grafik 4.7 maka didapatkan periode osilasinya sebesar:
0 3 sin 24
/ 2
2
jam Tos
π
π =
Dengan ? = 2p/24 jam
jam
T
os=
461
,
5
Gambar. 4.8. Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
kota Jakarta, berupa ayunan posisi y terhadap t (waktu)
Dengan mengambil posisi kota Jakarta yang terletak pada sudut 6o LS yang ditunjukkan pada grafik 4.8 maka didapatkan periode osilasinya sebesar:
0
6
sin
24
/
2
2
jam
T
osπ
π
=
Dengan ? = 2p/24 jam
jam
T
os=
230
,
7
4.3. Pendulum Khatulistiwa
Gambar 4.9. Grafik hasil simulasi persamaan gerak pendulum Foucault
di kota Pontianak berupa pola lintasan gerakan ayunan
pendulum pada posisi x terhadap Posisi y.
di khatulistiwa rotasi bumi tidak bisa diamati dalam kaitannya dengan ayunan pendulum karena bidang ayunan pendulum bergerak bersama dengan rotasi bumi dan tidak ada perubahan dalam hubungan yang terjadi. Hal ini terlihat pada gambar 4.5.Hal ini juga terlihat pada grafik posisi x terhadap posisi y dimana gerak osilasi pendulum adalah gerak osilasi sederhana, karena tidak mendapat pengaruh rotasi bumi. Besar sudut putaran untuk khatulistiwa, yaitu:
N= 360o sin 0o = 360o (0) N= 0o
Gambar. 4.10. Grafik hasil simulasi persamaan gerak pendulum Foucault untuk
Kota Pontianak, berupa ayunan posisi x terhadap t (waktu)
Hasil simulasi yang ditunjukkan pada gambar 4.6 merupakan gerak osilasi sederhana yang berulang secara teratur, dimana gerak osilasi pendulum adalah tidak mendapat pengaruh rotasi bumi. Di khatulistiwa ?=0, sehingga periodenya 8 yang berarti tidak terjadi rotasi. Tetapi di tempat yang makin kea rah kutub, rotasi itu makin nyata dan di Kutub dengan sudut 90o yang berarti periode rotasi itu semakin maksimum dan sebesar 24 jam.
Berdasarkan grafik-grafik pada subbab 4.1, 4.2, dan 4.3 terlihat bahwa letak lintang yang semakin ke kutub, maka Formulasi produk silang (Persamaan 2.8) juga memberitahukan kita bahwa gaya Coriolis mengambil nilai terbesar ketika ada gerakan yang tegak lurus terhadap sumbu rotasi, dan gaya ini akan hilang untuk semua gerakan paralel terhadap sumbu rotasi. Hanya gerakan, atau komponen gerakan, tegak lurus dengan O adalah dibelokkan. Gerakan vertikal di kutub tidak dibelokkan, tetapi pada khatulistiwa sepenuhnya dibelokkan. Di sisi lain gerakan horisontal di kutub sepenuhnya dibelokkan, tapi di khatulistiwa hanya jika gerakan itu berada di arah timur-barat yang dibelokkan vertikal.
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Semakin ke arah kutub maka pengaruh efek Coriolis semakin besar, ini terlihat dari pola lintasan pendulum kutub yang membetuk lingkaran penuh dan terlihat pepat.
2. Sudut putaran yang terbentuk oleh ayunan pendulum Foucault bervariasi di setiap lokasi di bumi, tergantung dari posisi sudut lintang. Di daerah kutub dimana sudut lintang 90o terbentuk pola lingkaran penuh, sedangkan di khatulistiwa dengan sudut lintang 0o tidak terbentuk pola.
3. Grafik yang ditunjukkan pada gambar 4.8 dan 4.10 mempresesi bumi secara relatif tetapi lebih lambat dari pendulum kutub yang diperlihatkan pada gambar 4.4.
4. Pendulum yang terikat pada sebuah tali dan dapat berayun secara bebas dan periodik yang menjadi dasar kerja dari sebuah jam dinding kuno yang mempunyai ayunan. Dalam bidang fisika, prinsip ini pertama kali ditemukan pada tahun 1602 oleh Galileo Galilei, bahwa perioda (lama gerak osilasi satu ayunan, T) dipengaruhi oleh panjang
tali dan percepatan gravitasi mengikuti rumus
g l
T =2π .
5.2 Saran
2. Pada penelitian selanjutnya dapat menggunakan metode lain dalam menyelesaikan persamaan gerak pendulum dan melihat perbandingannya dengan metode Runge-Kutta Orde 4 .
3. Pada penelitian selanjutnya dapat menggunakan metode adam untuk menyelesaikan persamaan gerak pendulum dan membandingkan secara analitik dan numerik.
DAFTAR PUSTAKA
Kandasamy,P, Thilagavathy,K., Gunavathy,K. 1997. Numerical Methods. New Delhi, S.Chand Company Ltd.
Marcelo, da Silva, 2004, intermediate Dynamics Complemented with Simulations and Animations, the McGraw Hill Companies, USA.
Pikatan, Sugata,
Akibat Rotasi Bumi,
jurnal Kristal no.9/Desember/2009, diunduh 12-
10-2010.
Peter, Soedojo, , 2000, Azas-Azas Mekanika Analisa, Yogyakarta: Gajah Mada University Press.
Prawirowardoyo, Susilo,1996,
Meteorology
, Bandung: Intitut Teknologi Bandung
Raymond P. Canale, Steven C. Chapra.1991. Metode Numerik Untuk Teknik Dengan Penerapan Pada Komputer Pribadi. Jakarta: Universitas Indonesia Press.Spigel, R. Murray,1994,
Analisis Vektor,
Jakarta : Erlangga.
Tiller, W, Bill, 1996,
physical science,
5
thedition, Arizona State University, New
york.
Thomson, T. William, 1992,
Teori Getaran Dengan Penerapan,
Jakarta: Erlangga.
Wolfram, S.1991.Mathematica: A System for Doing Mathematics by Computer.Second Edition. California: Addison Wesley Publishing Company, Inc.
LAMPIRAN A: LISTING PROGRAM ANIMASI PENDULUM FOUCAULT
(*pengenalan tampilan variabel)
Option Explicit
Private mDx7 As DirectX7
Private mDrw As DirectDraw7
Private mDrm As Direct3DRM3
Private mFrS As Direct3DRMFrame3
Private mFrC As Direct3DRMFrame3
Private mFrO As Direct3DRMFrame3
Private mFrL As Direct3DRMFrame3
Private mDev As Direct3DRMDevice3
Private mVpt As Direct3DRMViewport2
Private mDownX As Single
Private mMouseDown As Boolean
Dim ubah As Integer
Private Type dxPTM
dX As Single
dY As Single
Distance As Single
End Type
(menampilkan bola dengan bentuk 3D)
Private Sub LoadMesh()
Dim DxMeshB As Direct3DRMMeshBuilder3
mDrm.SetSearchPath App.Path
Set DxMeshB = mDrm.CreateMeshBuilder()
With DxMeshB
.LoadFromFile "sphere.x", 0, D3DRMLOAD_FROMFILE, Nothing, Nothing
.SetTexture mDrm.LoadTexture("peta-dunia1.bmp")
End With
mFrO.AddVisual DxMeshB
'Command4.Left = ubah
Me.Show: DoEvents
End Sub
mFrS.Move 1
With mVpt
.Clear D3DRMCLEAR_ALL
.Render mFrS
End With
mDev.Update
DoEvents
Loop
End Sub
(*inisialisasi layar backround)
Private Sub Initialise()
Set mDx7 = New DirectX7
Set mDrm = mDx7.Direct3DRMCreate
Set mDrw = mDx7.DirectDrawCreate("")
End Sub
Private Sub CreateSceneGraph()
Dim DxL1 As Direct3DRMLight
Dim DxL2 As Direct3DRMLight
With mDrm
Set mFrO = .CreateFrame(mFrS)
Set mFrL = .CreateFrame(mFrS)
Set DxL1 = .CreateLightRGB(D3DRMLIGHT_DIRECTIONAL, 0.8, 0.8, 0.8)
Set DxL2 = .CreateLightRGB(D3DRMLIGHT_AMBIENT, 0.5, 0.5, 0.5)
End With
mFrL.AddLight DxL1
mFrL.AddLight DxL2
mFrC.SetPosition Nothing, 0, 0, -2
End Sub
Private Sub CreateDisplay()
Dim DxClipper As DirectDrawClipper
Set mVpt = Nothing
Set mDev = Nothing
Set DxClipper = mDrw.CreateClipper(0)
ScaleMode = vbPixels
DxClipper.SetHWnd hWnd
Set mDev = mDrm.CreateDeviceFromClipper(DxClipper, "", ScaleWidth,
ScaleHeight)
Set mVpt = mDrm.CreateViewport(mDev, mFrC, 0, 0, ScaleWidth, ScaleHeight)
End Sub
Private Sub Form_Load()
ubah = 4080
Initialise
CreateSceneGraph
CreateDisplay
LoadMesh
RefreshLoop
Cleanup
End
End Sub
Private Sub Form_QueryUnload(Cancel As Integer, UnloadMode As Integer)
mStopFlag = True
End Sub
Private Sub Form_Resize()
CreateDisplay
End Sub
Private Sub mnuExit_Click()
mStopFlag = True
Public Sub Cleanup()
Set mVpt = Nothing
Set mDev = Nothing
Set mFrL = Nothing
Set mFrO = Nothing
Set mFrC = Nothing
Set mFrS = Nothing
Set mDrm = Nothing
Set mDx7 = Nothing
End Sub
Private Sub SetQuality(Quality As CONST_D3DRMRENDERQUALITY)
mDev.SetQuality Quality
mnuFlat.Checked = False
mnuWireframe.Checked = False
mnuFlat.Checked = True
End Sub
putar = Val(Text1.Text) / 5000
If Text1.Text <> "" Then
mFrO.SetRotation Nothing, 0, 1, 0, putar
End If
End Sub
Dim i As Integer
Private Sub Form_Load()
Timer1.Enabled = True
i = 1
End Sub
(*pengatur kecepatan perputaran bumi)
Private Sub Text1_Change()
Dim inter As Integer
If Text1.Text <> "" Then
inter = 5000 / Val(Text1.Text)
Timer1.Interval = inter
End If
End Sub
Private Sub Timer1_Timer()
If i > 5 Then
i = 1
End If
End Sub
LAMPIRAN B: LISTING PROGRAM SIMULASI PENDULUM FOUCAULT
(* Menentukan langkah- langkah yang digunakan pada metode Runge-Kutta*)
RungeKutta4[___]["Step"[f_,t_,h_,y_,yp_]]:=
Block[{deltay,k1,k2,k3,k4},
k1=yp;
k2=f[t+1/2 h,y+1/2 h k1];
k3=f[t+1/2 h,y+1/2 h k2];
k4=f[t+h,y+h k3];
deltay=h (1/6 k1+1/3 k2+1/3 k3+1/6 k4);
{h,deltay}
];
(* Menentukan Orde yang digunakan pada metode Runge-Kutta*)
RungeKutta4[___]["DifferenceOrder"]:=4;
(*fungsi untuk visualisasi pendulum*)
pendelPos[{x_,y_}]:={x,y,-Sqrt[10- x^2-y^2]};
pendel[tau_?NumericQ,sol_]:=({AbsoluteThickness[3],Line[{{0,0,0},pendelPos[{x[t]
,y[t]}]}],Sphere[pendelPos[{x[t],y[t]}],0.15]}/.sol[[1]])/.t? tau;
(*Penyelesaian persamaan gerak pendulum Foucault dengan metode Runge-Kutta*)
Manipulate[
fde={x''[t]? - g/l*x[t]+2 ? *Sin[? ]*y'[t],y''[t]? -g/l*y[t]-2 ? *Sin[? ]*x'[t]};
sol=NDSolve[Join[fde,{x[0]? x0,y[0]? y0,x'[0]? xd0,y'[0]? yd0}],{x[t],y[t]},{t,0,64
Pi},Method? RungeKutta4];
(*Menu pilihan*)
Which[Pilihan=="Visualisasi 3D",
Graphics3D[{ParametricPlot3D[pendelPos[{x[t],y[t]}/.sol[[1]]],{t,t1,t1+4
Pilihan? "Grafik x vs
y",ParametricPlot[Evaluate[{First[x[t]/.sol],First[y[t]/.sol]}],{t,100,200},ImageSize?
{550,375},PlotPoints? 1000,AxesLabel? {"x(m)","y(m)"}],
Pilihan? "Grafik x vs t",Plot[Evaluate[{First[x[t]/.sol]}],{t,0,64
Pi},ImageSize? {550,375},AxesLabel? {"t(s)","x(m)"}],
Pilihan? "Grafik y vs t",Plot[Evaluate[{First[y[t]/.sol]}],{t,0,64
Pi},ImageSize? {550,375},AxesLabel? {"t(s)","y(m)"}]],
(*Tampilan eksekusi program*)
Style[" SIMULASI GERAK PENDULUM
FOUCAULT",Bold,16,Darker[Green,.8],"Label"],
Delimiter,
Style[" ",Bold,16,Darker[Green,.8],"Label"],
Style["PARAMETER PENDULUM",Bold,12,Darker[Green,.8],"Label"],
Style[" ",Bold,16,Darker[Green,.8],"Label"],
{{g,9.8,"Percepatan Gravitasi"},9.8,10,0.01,ImageSize? Tiny,Appearance ?
"Labeled"},
{{l,10,"Panjang Tali"},1,10,1 ImageSize? Tiny,Appearance ? "Labeled"},
Delimiter,
Style["PARAMETER BUMI",Bold,12,Darker[Green,.8],"Label"],
Style[" ",Bold,16,Darker[Green,.8],"Label"],
{{? ,1/16,"Frekuensi Rotasi Bumi"},0,1/2,ImageSize? Tiny,Appearance ?
"Labeled"},
{{? ,Pi/3,"Sudut Lintang"},0,Pi/2,ImageSize? Tiny,Appearance ? "Labeled"},
Delimiter,
Style["KONDISI AWAL",Bold,12,Darker[Green,.8],"Label"],
Style[" ",Bold,16,Darker[Green,.8],"Label"],
{{x0,2,"x"},0.1,2,ImageSize? Tiny,Appearance ? "Labeled"},
{{xd0,0,"x'"},0,1,ImageSize? Tiny,Appearance ? "Labeled"},
{{y0,2,"y"},0.1,2,ImageSize? Tiny,Appearance ? "Labeled"},
{{yd0,0,"y'"},0,1,ImageSize? Tiny,Appearance ? "Labeled"},
{{t1,0,"Waktu"},0,60 Pi,ImageSize ? Tiny,Appearance ? "Labeled"},
Delimiter,
Style["MENU",Bold,12,Darker[Green,.8],"Label"],
Style[" ",Bold,16,Darker[Green,.8],"Label"],