Informasi Dokumen
- Sekolah: Universitas
- Mata Pelajaran: Teknik Elektronika
- Topik: Pengaturan Kecepatan Putaran Motor AC 1 Fasa Terhadap Beban Pada Alat Putar Keramik
- Tipe: tugas akhir
- Tahun: 2023
- Kota: Bandung
Ringkasan Dokumen
I. Latar Belakang
Alat putar keramik adalah alat yang digunakan dalam pembuatan keramik mentah dengan teknik pilin. Pengrajin keramik sering menggunakan alat putar konvensional yang dioperasikan secara manual, yang dapat mengakibatkan kelelahan dan ketidakefektifan saat kecepatan alat berkurang akibat beban yang ditambahkan. Oleh karena itu, dibutuhkan alat putar modern yang menggunakan motor listrik untuk menjaga kecepatan putaran yang konstan, serta aman dari risiko sengatan listrik. Dalam dokumen ini, alat pengatur kecepatan motor AC 1 fasa dirancang dengan mikrokontroler AVR ATMega16 untuk mengatasi masalah ini.
II. Tujuan
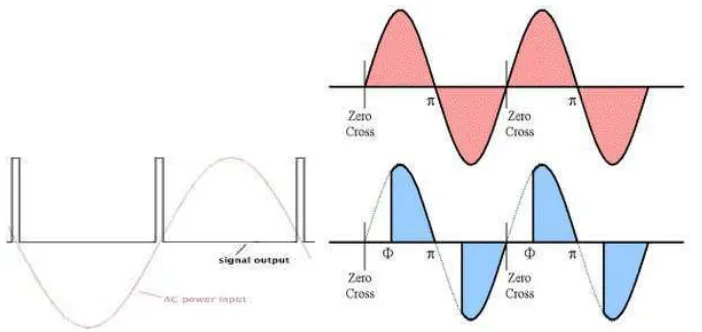
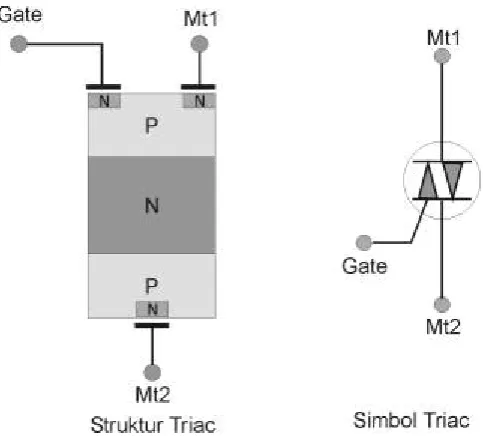
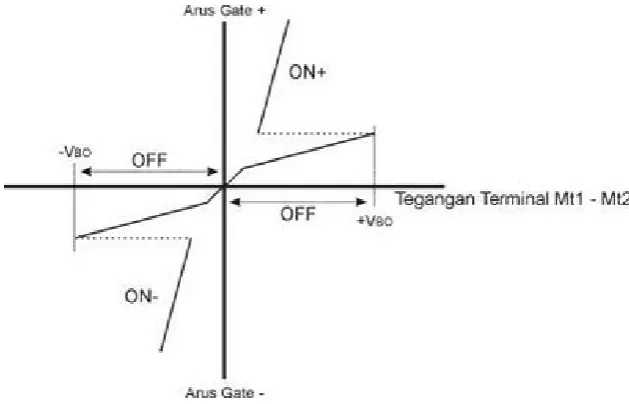
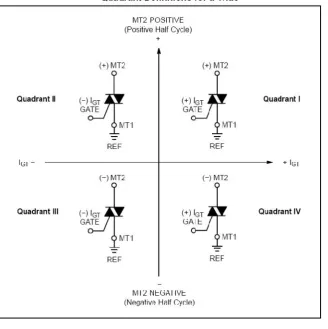
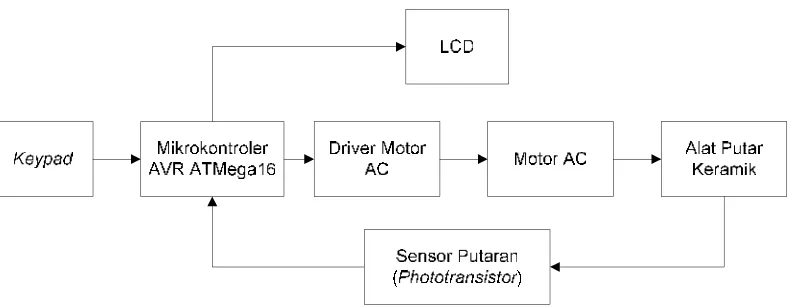
Tujuan dari perancangan alat putar keramik ini meliputi pemanfaatan motor AC sebagai penggerak, aplikasi mikrokontroler AVR ATMega16 untuk pengendalian kecepatan, penggunaan TRIAC Optoisolators sebagai pengendali motor, serta pengembangan sensor kecepatan menggunakan Phototransistor. Dengan demikian, alat ini diharapkan dapat beroperasi dengan kecepatan konstan meskipun beban tanah liat bervariasi, meningkatkan efisiensi kerja pengrajin.
III. Rumusan Masalah
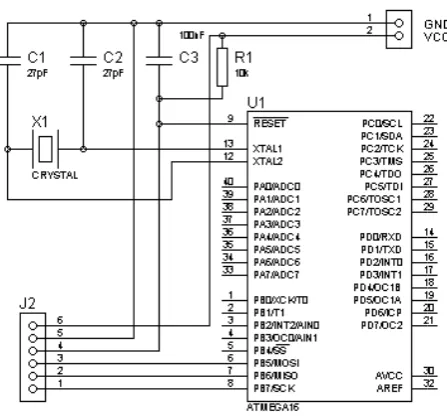
Rumusan masalah yang diangkat dalam perancangan ini mencakup cara merancang alat putar keramik dengan motor AC 1 fasa berbasis mikrokontroler AVR ATMega16, penggunaan fitur Fast PWM pada Timer/Counter 1, serta pengaturan interupsi eksternal. Selain itu, juga dibahas cara merancang rangkaian sensor kecepatan dengan Phototransistor dan rangkaian pengendali motor AC menggunakan TRIAC Optoisolators.
IV. Batasan Masalah
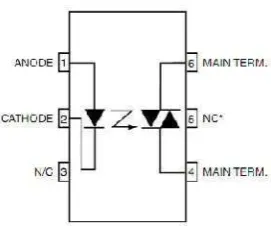
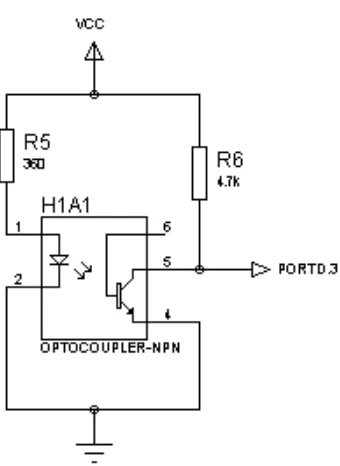
Batasan masalah dalam perancangan alat ini mencakup penggunaan mikrokontroler AVR ATMEGA16, LCD 16 X 2 sebagai tampilan, keypad 3 X 4 untuk input kecepatan, dan motor AC Capacitor Run 1 fasa 220V/50Hz. Sensor kecepatan menggunakan Phototransistor tipe H21A1 dan TRIAC Optoisolators tipe MOC3041. Beban maksimum yang dapat ditangani adalah 20 Kg dengan kecepatan setpoint antara 60-150 rpm.
V. Metodologi Penelitian
Metodologi penelitian yang digunakan meliputi studi literatur untuk mengumpulkan informasi dari berbagai sumber, observasi langsung terhadap objek penelitian, serta wawancara untuk mendapatkan informasi tambahan. Proses perancangan dibagi menjadi dua tahap: perancangan perangkat keras dan algoritma program. Pengujian sistem dilakukan pada setiap blok rangkaian dan keseluruhan rangkaian setelah terhubung.
VI. Sistematika Penulisan
Dokumen ini disusun dalam beberapa bab, dimulai dari Pendahuluan yang menjelaskan latar belakang, tujuan, batasan masalah, metodologi, hingga sistematika penulisan. Bab selanjutnya menguraikan teori dasar yang mendasari perancangan, diikuti dengan bab perancangan alat dan program mikrokontroler, pengujian alat, dan diakhiri dengan kesimpulan serta saran untuk pengembangan lebih lanjut.
Referensi Dokumen
- Teach Yourself Electricity and Electronics ( Stan Gibilisco )
- Digital Electronics: Principles and Applications ( Tokheim )