ROBOT PENGANGKUT BOX BERDASARKAN
PERBEDAAN WARNA RGB BERBASIS MIKROKONTROLER
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Disusun Oleh :
Bambang Ismoyo Jati
10206064
Pembimbing : Agus Mulyana, M.T Taufiq Nuzwir Nizar, S.Kom
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
i
KATA PENGANTAR
Assalamu’alaikum Wr. Wb
Segala puji bagi Allah SWT. Pencipta dan pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW, keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT, akhirnya penulis dapat menyelesaikan tugas akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin penulis sebutkan satu persatu, namun dengan segala kerendahan hati, penulis mengucapkan terima kasih kepada:
1. Sri Nurhayati, M.T selaku Ketua Jurusan Teknik Komputer Universitas Komputer Indonesia.
2. Agus Mulyana, M.T selaku dosen pembimbing I, yang telah banyak membantu penulis selama melaksanakan studi dan menyelesaikan tugas akhir ini.
3. Taufiq Nuzwir Nizar S.Kom selaku dosen pembimbing II, yang telah banyak membantu penulis selama melaksanakan studi dan menyelesaikan tugas akhir ini.
4. John Adler, M.Si selaku dosen wali. Terima kasih banyak atas bimbingannya selama penulis menjalani masa perkuliahan.
5. Orang tua, kakak dan keluarga besar tercinta yang senantiasa tidak henti-hentinya berdo’a, mencurahkan cinta, kasih sayang, perhatian, nasihat, serta motivasi sehingga penulis dapat menyelesaikan tugas akhir ini.
6. Bapak dan Ibu seluruh staff dosen Jurusan Teknik Komputer yang telah banyak memberikan ilmu, motivasi dan bantuan kepada penulis.
ii
Prayoga, Doni Kusuma, Rahmat Hadi Wibowo, Nurhayati. Semua teman-teman di angkatan 2005, 2006 dan 2007.
8. Seluruh pihak yang mungkin terlupakan oleh penulis, namun telah banyak membantu penulis. Terima kasih sebanyak-banyaknya.
Akhirnya, penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia ilmu pengetahuan dan teknologi di Indonesia, khususnya disiplin keilmuan yang penulis dalami.
Wassalamualaikum Wr. Wb.
Bandung, Agustus 2011
iii
ABSTRAK
Robot telah banyak dikembangkan, karena robot berguna untuk membantu kerja manusia misalnya, untuk pekerjaan yang memerlukan ketelitian yang tinggi pada bidang perindustrian, melakukan pekerjaan dengan resiko bahaya yang tinggi ataupun melakukan pekerjaan yang membutuhkan tenaga besar dan sebagainya. Pada bidang industri dengan adanya robot maka proses produksi akan lebih cepat. Biasanya pada industri– industri untuk membedakan jenis dari bahan pada box diberi tanda seperti warna box atau kode – kode lain yang dapat
membedakan objek. Tanda yang sama pada objek menyatakan jenis bahan yang sama. Di dalam industri, barang hasil produksi akan dikelompokkan berdasarkan jenis bahan atau barang yang sama.
Robot yang dirancang menggunakan motor DC sebagai penggerak putaran roda dengan IC L298 sebagaidriver motor, sensor garis sebagai pendeteksi garis, dan robot dapat mengangkatbox ketempat tujuan sesuai dengan warnanya. Robot ini hanya dapat mendeteksi tiga warna dasar, yaitu warna merah, warna hijau, dan warna biru. Warna RGB (Red, Green, Blue) dideteksi dengan menggunakan sensor warna TCS3200 yang memiliki output frekuensi, besar frekuensi yang dihasilkan tergantung dari panjang gelombang warna objek dan intensitas cahaya. Sedangkan sebagai pusat kendali dari mobile robot ini menggunakan mikrokontrolerbasic stamp, yang diprogram menggunakan bahasabasic.
Perancangan robot bertujuan untuk dapat memindahkanboxsesuai dengan warna dan jalan sesuai dengantrackyang telah ditentukan.
iv
ABSTRACT
The robot has been developed, because the robot is useful to help the
working man for example, for jobs that require high precision in the fields of
industry, doing work with a high risk of danger or doing jobs that require great
strength and so forth. In the field of industrial robots in the presence of the
production process will be faster. Usually in the industry - the industry to
distinguish the type of material the object is marked as the color of box or codes
-other code that can distinguish box. The same sign on the box states the same type
of material. In industry, production of goods will be grouped by type of material
or goods of the same.
The robot is designed using a DC motor to drive the wheels with the IC
L298 as motor drivers, sensor line as a line detector, the robot can lift boxs and
place of destination in accordance with the color. This robot can only detect three
basic colors, namely red, green, and blue. The color RGB (Red, Green, Blue) was
detected using a color sensor TCS3200 output frequency, the frequency of the
generated depends on the wavelength of the object color and light intensity.
Meanwhile, as the central control of mobile robot using a microcontroller basic
stamp, which is programmed using basic language.
The design of the robot can move the box aims to match the color and the
way in the tracks that have been determined.
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi sekarang ini telah menciptakan berbagai kemajuan dibidang teknologi, khususnya teknologi dibidang robotika. Perkembangan elektronika juga memberikan kemajuan dalam mengontrol robot itu sendiri. Sekarang ini, ilmu pengetahuan dan teknologi sangat diperlukan untuk membantu aktivitas manusia yang semakin berkembang. Perkembangan ilmu dan teknologi ini didasari oleh pola pikir manusia yang semakin cerdas serta keinginannya untuk mencari segala sesuatu yang lebih mudah, praktis dan ekonomis. Salah satu teknologi yang banyak digunakan pada sekarang ini adalah teknologi mikrokontoler. Robot merupakan salah satu perkembangan dalam bidang teknologi mikrokontroler.
Dalam perkembangannya, robot dapat digunakan dalam suatu industri, dengan adanya robot maka proses produksi dalam industri akan lebih cepat. Robot juga memiliki tingkat ketelitian yang tinggi jika dibandingkan dengan tenaga manusia.
Pada sebuah industri, untuk membedakan jenis produk biasannya di bedakan dari kemasan atau box yang diberi tanda seperti warna pada box atau kode – kode lain yang dapat membedakan box. Warna yang sama pada box
menyatakan jenis produk yang sama. Di dalam industri, barang hasil produksi dikelompokkan berdasarkan jenis yang sama.
2 1.2 Rumusan Masalah
Permasalahan yang akan di bahas pada tugas akhir ini adalah: 1. Bagaimana cara membuat robotline follower.
2. Bagaimana cara robot dapat menentukan warna dan menyimpan barang atauboxsesuai dengan tempat yang telah ditentukan
3. Bagaimana cara robot ini dapat berjalan dengan cepat, jelas dan akurat dengan adanya beban daribox.
1.3 Maksud dan Tujuan
Maksud dari tugas akhir ini adalah merancang sebuah robot pengangkut
box berdasarkan perbedaan warna, yang dimana box yang berdasarkan warna akan di random di tempat asal dan robot dapat memindahkan box dari asal ke tempat tujuan penyimpananbox.
Sedangkan tujuan robot pengangkut box berdasarkan perbedaan warna sebagai simulasi robot di bidang industri, dimana dengan adanya robot ini maka pekerjaan dalam sebuah pabrik industri, akan semakin mudah dan ringan dalam pemindahan box dari asal pengambilan barang menuju ke tempat penyimpanan barang berdasarkan jenisnya.
1.4 Batasan Masalah
Pada perancangan yang akan dibuat ini terdapat beberapa batasan masalah, yaitu:
1. Box hanya terdiri dari 3 warna yaitu warna merah, warna hijau dan warna biru.
2. Ukuran dan berat box yang dibuat, yaitu: panjang box ± 6,5 cm dan lebarbox± 5,5 cm.
3. Beratboxyang digunakan maksimal ± 150 gram.
4. Robot mengambilbox dari asal secara randomdan menyimpan box di tujuan sesuai dengan warna box yang diambil, tanpa mengecek tempat penyimpanan yang lainnya.
3 1.5 Metode Penelitian
Metode penelitian yang dilakukan penulis di antaranya: 1. Studi Kepustakaan
Melakukan pengumpulan bahan materi yang berhubungan dengan tugas akhir, seperti buku-buku dan browsing di internet serta melakukan pengumpulan komponen-komponen yang dibutuhkan pada perancangan robot yang dibuat.
2. Perancangan
Mengaplikasikan teori yang didapat dalam perancangan sistem untuk perangkat keras dan perangkat lunak
3. Percobaan Eksperimental
Melakukan ujicoba perangkat keras maupun perangkat lunak, meliputi pengujian setiap komponen atau sensor-sensor dengan mengkalibrasi setiap sensor yang digunakan.
4. Pengujian
Melakukan pengujian alat secara keseluruhan, yaitu pengujian robot yang dibuat.
5. Analisa data
Melakukan analisa berdasarkan hasil pengujian robot yang dibuat. 6. Simpulan
Mengambil sebuah simpulan dari hasil analisa yang dilakukan. 7. Laporan
Membuat laporan berdasarkan hasil penelitian tugas akhir yang dibuat.
1.6 Sistematika Penulisan
Tugas akhir ini tersusun atas beberapa bab pembahasan. Sistematika pembahasan tersebut adalah sebagai berikut :
1. BAB I Pendahuluan
4 2. BAB II Landasan Teori
Mengemukakan dan menjelaskan tentang teori- teori pendukung yang digunakan dalam perancangan dan pembuatan tugas akhir.
3. BAB III Perancangan Sistem
Mengemukakan tentang perancangan alat yang dibuat untuk tugas akhir ini, meliputi garis besar sistem, perancangan perangkat keras dan perangkat lunak yang digunakan, sehingga menjadi suatu alat yang dapat bekerja dengan baik.
4. BAB IV Pengujian dan Analisa Sistem
Berisi tentang pengujian-pengujian serta analisa perangkat keras dan perangkat lunak, analisa kelayakan perancangan robot dan pengintegrasian sistem secara keseluruhan.
5. BAB V Simpulan dan Saran
5
BAB II
DASAR TEORI
2.1 Sejarah Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan).
Kata robot sendiri, diperkenalkan oleh seorang penulis sains-fiksi berkebangsaan Ceko (Czech), Karel Capek (9 Januari 1890-25 Desember 1938) pada tahun 1920an. Robot sendiri, menurut Karel Capek, bukanlah pengertian "robot" yang seperti kita kenal sekarang ini. Robot menurut dia adalah sesuatu yang mengarah kepada "monoton", dan "pekerja". Karel Capek memperkenalkan istilah robot (robota, bahasa Ceko-Ensiklopedia Indonesia) dalam sebuah karya sandiwaranya, Rossum's Universal Robot.
Penciptaan robot yang sesunguhnya (bukan robot dalam sandiwara Karel Capek), bermula dari keinginan manusia untuk membuat tiruan binatang atau manusia itu sendiri. Namun fasilitas pengetahuan pada masa itu nampaknya menjadi kendala terbesar dalam terwujudnya proyek tersebut. Akhirnya, dibuatlah robot sederhana beroda yang digunakan untuk keperluan navigasi, pengamatan tingkah laku, sampai dengan perencanaan jalur.
2.2 Perangkat Keras (Hardware) 2.2.1 Mikrokontroler (Basic Stamp 2p40)
Basic stamp adalah mikrokontroler yang dikembangkan oleh Parallax Inc
yang diprogram menggunakan format bahasa pemrograman basic. Program yang telah dibuat akan diunduh melalui port serial. Mikrokontroler basic stamp
membutuhkan power supply saat mengunduh program dan program yang sudah diunduh tidak akan hilang meskipun baterai ataupower supplydilepas.
Kode pemograman basic disimpan di dalam EEPROM serial pada board
6 memory saat kehilangan power. EEPROM digunakan dalam basic stamp yang dijamin menyimpan data selama 40 tahun ke depan dan mampu ditulisi ulang 10.000.000 kali per lokasi memori.
Mikrokontrolerbasic stampmemiliki versi yang berbeda-beda.Basic stamp
memiliki versi, yaitu basic stamp 1, basic stamp2, basic stamp 1e, basic stamp
2P, basic stamp 2Pe dan basic stamp 2sx. Pada modul basic stamp terdapat IC
regulator LM7805 dengan output 5 volt yang mengubah input 6 hingga 15 volt
(pada pin VIN) turun menjadi 5voltyang dibutuhkan komponen.Basic stampyang
dipakai adalah basic stamp2P40 yang mempunyai 32 pin I/O. Berikut ini adalah tampilanbasic stamp2P40.
Gambar 2.1 Modul basic stamp 2p40 (BS2P40)
Basic stampini mempunyai spesifikasihardwaresebagai berikut:
1. Mikrokontrolerbasic stamp2P40Interpreter Chip(PBASIC48W/P40). 2. 8 x 2Kbyte EEPROM yang mampu menampung hingga 4000 instruksi. 3. Kecepatan prosesor 20MHz Turbo dengan kecepatan eksekusi program
hingga 12000 instruksi per detik.
4. RAM sebesar 38byte(12 I/O, 26 variabel) dengan Scratch Pad sebesar 128byte.
5. Jalurinput/outputsebanyak 32 pin.
7 Berikut ini adalah alokasi pin yang terdapat pada mikrokontroler basic
stamp2P40.
Gambar 2.2 Alokasi pin basic stamp
2.2.2 Sensor Garis
Sensor garis dalam seuah robot line follower ibarat mata yang dapat menentukan arah geraknya. Sensor garis adalah sensor yang berfungsi mendateksi garis yang berwarna hitam atau putih.
Sensor garis terdiri dari komponen yang berfungsi sebagai pemancar cahaya yaitu infrared, LED superbright, dll dan komponen yang berfungsi penerima cahaya yaitu phototransistor, photodiode, LDR (light defendant
Resistor). Dengan memanfatkan fitur ADC (Analog to Digital Converter) yang
terdapat pada mikrokontroler sebagai pembanding tegangan, yang nantinya akan menghasilkanoutputdigital dari sensor.
2.2.2.1 Light Emitting Diode (LED)
gallium, arsenic dan phosphor cahaya yang berbeda pula.
Saat ini, warna-warna merah, kuning dan hijau. LED warna bisa dihasilkan, tetapi Dalam memilih LED, selain maksimum dan dispasi daya bermacam-macam, ada yang tampilan LED.
Gambar
2.2.2.2 Phototransistor
Phototansistormerupa
cahaya yang ada disekitarny akan terhubung dengan emit
phototransistor sama seper
phototransistor akan bekerj
mendapatkan kondisiondanof
phorus. Jenis doping yang berbeda menghasilkan wa
na cahaya LED yang banyak tersedia adalah wa ED berwarna biru sangat langka. Pada dasarnya, sem api itu akan menjadi sangat mahal dan tidak efis
n warna, perlu juga diperhatikan tegangan kerja, a ya-nya. Rumah (chasing) LED dan bentuknya j ng persegi empat, bulat dan lonjong. Berikut ini ada
bar 2.3 Bentuk fisik LED dan simbol LED
upakan suatu jenistransistoryang sangat peka terha nya. Ketika basis menangkap cahaya maka colle
mitter dalam hal ini transistor bekerja. Prinsip ke
perti transistor pada umumnya dengan kata kerja seperti saklar dengan parameter cahaya unt
Cara kerja phototrans
collectorakan terhubung deng
ini adalah simbolphototransis
Gambar 2.4 Bentuk fis
2.2.3 Komparator
Komparator adalah se
membandingkan sebuah sinya sebuah garis bilangan, dima
thresholdatau pembatas, jika
disebut bilangan positif tetapi disebut bilangan negatif. Beri
Gambar 2.5 Bentu
Pada komparator,thres
sedangkan outputnya akan m tergantung rancangan dan konf Ilustrasi sebuah rangkaian kom
ansistor yaitu ketika basis menangkap cahaya m
denganemitter dalam hal initransistorbekerja. Ber
ansistor.
fisik phototransistor dan simbol phototransistor
h sebuah rangkaian elektronik yang berfungsi unt nyal masukan dengan tegangan referensi (VRef). Asum
mana nol dianggap sebagai tegangan referensi
ka ada bilangan yang lebih dari nol maka bilangan tapi sebaliknya, jika ada bilangan di bawah nol m erikut ini adalah tampilan IC LM 393.
ntuk fisik IC LM 393 dan simbol komparator
hresholdberfungsi membandingkan sebuah sinyalinpu
n memiliki dua kondisi berbeda yaitu low atau hi
n konfigurasi dari rangkaian op-amp yang digunaka komparator seperti terdapat pada gambar berikut.
Gambar
Dari dua gambar di a yaitu mode invertingataumode
sebelah kiri), sinyal input m masuk ke pin -. Jika sinyal input
berlogika low, dan jika siny
high.
Untuk konfigurasi non
inputdi bawahthreshold, mak
atas threshold maka output
thresholddanoutputada di ga
2.2.4 Motor DC
Roda digerakkan meng roda sebelah kiri dan kanan. M yang berfungsi untuk menguba umum, kecepatan putaran por meningkatnya tegangan yang
bar 2.6 Rangkaian komparator
atas, komparator terbagi ke dalam dua konfigur
mode non-inverting. Pada rangkaianinverting(gam
masuk ke pin + dari op-amp, dan tegangan refer
linput melewati / di atas threshold, maka outputa
nyal input di bawah threshold, maka output berlog
non-inverting ada di gambar sebelah kanan, jika siny
akaoutputakan berlogikalow, dan jika sinyalinput
put akan berlogika high. Detil ilustrasi sinyal input
gambar 2.6 bagian bawah kiri dan bawah kanan.
enggunakan dua buah motor DC yang dipasang pa . Motor DC merupakan peralatan elektromekanik da ngubah tenaga listrik menjadi tenaga mekanik. Se n poros motor DC akan meningkat seiring deng
11 akan berbalik arah jika polaritas tegangan yang diberikan juga dirubah. Bentuk fisik motor DC dapat dilihat pada gambar 2.7.
Gambar 2.7 Bentuk fisik Motor DC
Motor DC tidak dapat dikendalikan langsung oleh mikrokontroler, karena kebutuhan arus yang besar sedangkan keluaran arus dari mikrokontroler sangat kecil. Motor driver merupakan alternatif yang dapat digunakan untuk menggerakkan motor DC.
2.2.5 Motor Driver
L298 adalah IC yang dapat digunakan sebagai driver motor DC. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge dikontrol menggunakan level tegangan TTL yang berasal dari output mikrokontroler. L298 dapat mengontrol 2 buah motor DC. Tegangan yang dapat digunakan untuk mengendalikan robot bisa mencapai tegangan 46 VDC dan arus 2 A untuk setiap
kanalnya. Berikut ini bentuk IC L298 yang digunakan sebagai motordriver.
12 2.2.6 Double Gearbox
Gearboxberfungsi sebagai pereduksi putaran ataurotate per minutes(rpm)
dari motor dan juga berfungsi menghasilkan kekuatan putar (torsi) yang lebih besar. Diketahui bahwa sebuah robot tidak hanya memerlukan kecepatan motor yang tinggi, tetapi juga torsi yang besar. Untuk model robot tertentu, kecepatan motor bahkan tidak diperlukan. Sebagai contoh robot yang akan di buat robot pengangkut box berdasarkan perbedaan warna yang membutuhkan torsi yang besar untuk mengangkut box dengan beban ± 150 gram. Berikut ini adalah tampilandouble gearbox.
Gambar 2.9 Bentuk fisik double gearbox
2.2.7 Pulse Width Modulation (PWM)
PWM (Pulse width Modulation), adalah sebuah metode untuk pengaturan
kecepatan perputaran, dalam hal ini adalah motor DC untuk gerak robot. PWM dapat dihasilkan oleh empat metode, sebagai berikut :
1. Metode analog 2. Metode Digital 3. IC diskrit 4. Mikrokontroler
PWM mulai dari 0-255. Seca nilai ini didapat dari perbandi adalah periode atau waktu t bagian puncak positif (T hi
prosentase PWM seperti terda
Gambar
Semakin rapat periode semakin tinggi, ini berarti ke pulsa, maka frekuensi sema menurun. Kondisi pemberian yang akan dilewati oleh robot mendapatkan nilai PWM yang
2.2.8 Motor Servo
Sebuah motor servo a membelokkan dan menjaga s elektronik itu. Pada peranca bagian kanan dan kiri untuk motor servo akan membuka
maka servoakan menutup ba
Berikut ini adalah tampilan m
ecaraanalogbesaran PWM dihitung dalam prosent ndingan: Thigh/ (Thigh+ Tlow) * 100%. Diman u tempuh untuk sebuah pulsa, yang terbagi men
high) dan puncak negatif (T low). Ilustrasi sebua rdapat pada gambar berikut.
bar 2.10 Ilustrasi prosentase PWM
ode antar pulsa, maka frekuensi yang dihasilkan a kecepatan akan bertambah. Semakin lebar jarak a makin rendah ini berarti kecepatan berkurang a ian kecepatan harus disesuaikan dengan kondisi tr
obot, misal pada saat jalan lurus, naik atau turun ha ng tepat.
adalah alat yang dapat mengendalikan posisi, da a suatu posisi berdasar penerimaan pada suatu sig ncangan gripper digunakan 2 buah motor servo pa
14
Gambar 2.11 Bentuk fisik motor servo HiTec HS-5645MG
HS-5645MG adalah motor servo yang dibuat oleh HiTec. Berikut merupakan spesifikasi dari motorservotersebut :
1. Jenis motor adalah 3pole ferrite
2. Jenis bearingadalahdual ball bearing
3. Torsi 10.3 kg/ cm di 4,8 V
4. Kecepatan 0,23 detik/ 60º di 4,8 V 5. Ukuran 40.6 X 19.8 X 37.8 mm 6. Berat 60 g
Sebuah motorservo standard adalah alat yang dapat mengendalikan posisi, dapat membelokkan dan menjaga suatu posisi berdasar penerimaan pada suatu signal elektronik itu. Karena motorservomerupakan alat untuk mengubah energi listrik menjadi energi mekanik, maka magnet permanent motor servo yang mengubah energi listrik ke dalam energi mekanik melalui interaksi dari dua medan magnet. Berikut ini adalah tampilan motorservo.
15 Bagian-bagian dari sebuah motorservo standardadalah sebagai berikut: 1. Konektor yang digunakan untuk menghubungkan motor servo dengan
Vcc,Grounddan signalinputyang dihubungkan keBasic Stamp.
2. Kabel menghubungkan Vcc,Ground dan signal inputdari konektor ke motorservo.
3. Tuas menjadi bagian dari motor servo yang kelihatan seperti suatu bintang four-pointed. Ketika motor servo berputar, motor servo akan bergerak ke bagian yang dikendalikan sesuai dengan program.
4. Cassing berisi bagian untuk mengendalikan kerja motor servo yang
pada dasarnya berupa motor DC dan gear. Bagian ini bekerja untuk menerima instruksi dari basic stamp dan mengkonversi ke dalam sebuah pulsa untuk menentukan arah atau posisiservo.
2.2.9 Sensor Ultrasonik
Sensor ultrasonik (sensor jarak) adalah salah satu elemen penting pada sebuah robot yang sedang bergerak. Hal ini dibutuhkan oleh robot untuk mengetahui posisi robot terhadap objek-objek tertentu seperti box. Dalam jarak antara 3 cm hingga 3 meter, ultrasonik adalah media yang sesuai dengan perancangan robot ini. Contoh penerapannya di simpan di depan robot, agar robot mengetahui apakah di depannya terdapat box atau tidak ada box. Berikut ini adalah tampilan fisik modul sensor ultrasonik.
Gambar 2.13 Bentuk fisik modul sensor ultrasonik
16 yang sering digunakan dipasaran adalah sensor yang memiliki respon frekuensi 40kHz. Oleh karena itu, untuk memancarkan sinyal dengan respon maksimum, dibutuhkan gelombang dengan frekuensi kHz yang dibangkitkan dengan osilator.
Pada Gambar 2.14, tampak bahwa osilator dibangkitkan oleh trigger dari mikrokontroler dan dikuatkan oleh bagian penguat sebelum dipancarkan oleh pemancar ultrasonik. Sinyal ultrasonik akan terpancar setelah getaran ke-8 dari osilator dilakukan. Berikut ini adalah tampilan sistem pengukuran jarak dengan ultrasonik.
Gambar 2.14 Sistem pengukuran jarak dengan ultrasonik
Penerima ultrasonik akan menerima pantulan dari objek dan mengubahnya menjadi getaran-getaran listrik. Namun, getaran tersebut masih terlalu lemah sehingga perlu dikuatkan oleh sebuah penguat sebelum masuk ke mikrokontroler.
Mikrokontroler akan berhenti melakukan perhitungan saat sinyal ultrasonik diterima kembali. Perhitungan waktu dari saat sinyal ultrasonik pertama kali dipancarkan hingga diterima telah diperoleh. Jarak yang ditempuh oleh rambatan gelombang ultrasonik mulai dari dipancarkan hingga memantul pada objek dan kembali diterima akan diperoleh dengan mengalirkan kecepatan rambatan suara dengan waktu yang diperoleh.
Sedangkan jarak antara sensor dengan objek adalah1/2 kali jarak rambatan
gelombang ultrasonik. Untuk mempermudah kinerja otak dari robot dalam mengukur jarak, maka proses perhitungan waktu dan konversi ke dalam jarak tadi
17 dilakukan oleh mikrokontroler tersendiri yang dikemas dalam suatu modul yang di sebut sensor ultrasonik. Berikut ini adalah timing diagram sensor ultrasonik.
Gambar 2.15 Timing diagram sensor ultrasonik
Dengan modul sensor ultrasonik, mikrokontroler yang menjadi otak robot hanya perlu mengirimkan sebuah trigger dan mikrokontroler pada sensor ultrasonik yang akan membangkitkan sinyal ultrasonik serta melakukan perhitungan seperti yang telah dijelaskan sebelumnya.
Hasil perhitungan akan dikonversi menjadi sebuah pulsa, di mana lebar pulsa akan menentukan jarak yang diperoleh. Otak robot hanya perlu menghitung lebar pulsa tersebut untuk memperoleh nilai jarak antara sensor dengan objek.
2.2.10 Sensor Warna
Salah satu identifikasi objek yang sering digunakan pada aplikasi robotik adalah pengenalan warna. Dengan teknologi infrared, proses pengenalan warna dapat dilakukan dengan memperhitungkan kuat lemahnya pantulan cahaya.
Sensor warna TCS 3200 adalah sensor warna buatan TAOS Parralax. TCS 3200 adalah produk penyempurnaan dari produk sebelumnya yaitu TCS 230. Perbedaan antara TCS 3200 dan TCS 230 adalah konsumsi arusnya.
Trigger minimum 10us
Pancaran ultrasonik
Keluaran ultrasonik
18 Sensor warna berfungsi sebagai pembeda warnabox. Warna di pakai adalah warna dasar yaitu Red, Green dan Blue (RGB) untuk nantinya akan dikelompokkan berdasarkan warna yang sama di tempat penyimpanan. Berikut ini adalah sensor warna seri TCS3200 yang dipakai.
Gambar 2.16 Modul sensor warna TCS3200
RGB (Red Green Blue) adalah ruang warna asli yang digunakan pada system grafik computer yang merupakan system warna untuk menagkap gambar. RGB digunakan karena mata manusia sensitif terhadap warna merah, hijau dan biru. Gambar berikut menampilkan perbedaan antara warna RGB dan CMYK.
Gambar 2.17 Perbandingan warna RGB dan CMYK
19
Tabel 2.1 Nilai warna RGB refrensi dari custom color pada paint O/S Windows
No Warna R G B
1 Hitam 0 0 0
2 Merah 255 0 0
3 Hijau 0 255 0
4 Biru 0 0 255
5 Ungu/ Magenta 128 0 128
6 Biru Muda/ Cyan 0 128 128
7 Kuning 255 255 0
8 Putih 255 255 255
2.2.11 Catu Daya
Catu daya memegang peranan yang sangat penting dalam hal perancangan sebuah robot. Pemilihan catu daya yang tepat akan menghasilkan robot yang bekerja dengan baik.
Penentuan sistem catu daya yang akan digunakan ditentukan oleh banyak faktor, diantaranya:
1. Tegangan: Setiap aktuator tidak memiliki tegangan yang sama. Hal ini akan berpengaruh terhadap disain catu daya. Tegangan tertinggi dari salah satu aktuator akan menentukan nilai tegangan catu daya.
2. Arus: memiliki satuan Ah (Ampere-hour). Semakin besar Ah, semakin lama daya tahan baterai bila digunakan pada beban yang sama.
3. Teknologi Baterai: Baterai isi ulang ada yang dapat diisi hanya apabila benar-benar kosong, dan ada pula yang dapat diisi ulang kapan saja tanpa harus menunggu baterai tersebut benar-benar kosong.
Baterai yang digunakan pada perancangan robot ini berjenis lithium
polymer (LiPo). Baterai ini dapat diisi ulang (rechargeable). Baterai yang
digunakan memiliki tegangan 7,4 Volt dan arus sebesar 2200 mAh dengan 2 cell
20 jika tegangan baterai turun mendekati batas tegangan 7,4 Volt, sehingga harus diisi ulang agar melebihi tegangan 7,4 Volt. Berikut ini adalah contoh sebuah baterailithium polymer.
Gambar 2.18 Baterai lithium polymer
Selain jenis baterailithium polymer(LiPo), masih banyak lagi jenis baterai yang tersedia di pasaran dengan spesifikasi yang beragam dan dapat digunakan untuk catu daya. Diantaranya baterai Ni-Cd,Alkaline,Lead Acid dan sebagainya, yang masing-masing mempunyai kelebihan dan kekurangannya.
2.3 Perangkat Lunak (Software) 2.3.1 Pengenalan Basic Stamp Editor
Perangkat lunak merupakan faktor penting dalam tahap perancangan robot. Perangkat lunak ini merupakan algoritma gerak dan tugas robot dalam bentuk listing program yang ditanamkan kedalam mikrokontroler. Program dapat bermacam - macam bentuk versi dan bahasa pemrogramannya, sesuai dengan spesifikasi dari mikrokontroler yang digunakan.
Mikrokontrolerbasic stamp (BS2P40) menggunakan bahasa pemrograman
basic. Software yang digunakan adalah basic stamp editor. Basic stamp editor
adalah sebuah editor yang dibuat oleh Paralax Inc untuk menulis program,
mengkompile dan mendownloadnya ke mikrokontroler keluarga basic stamp.
21 Berikut ini beberapa instruksi-instruksi dasar yang dapat digunakan pada mikrokontrolerbasic stamp.
Tabel 2.2 Beberapa instruksi dasar basic stamp
Instruksi Keterangan
DO...LOOP Perulangan
GOSUB Memanggil prosedur IF..THEN Percabangan
FOR...NEXT Perulangan
PAUSE Waktu tunda milidetik IF...THEN Perbandingan
PULSOUT Pembangkit pulsa PULSIN Menerima pulsa
GOTO Loncat ke alamat memori tertentu HIGH Menset pin I/O menjadi 1
LOW Menset pin I/O menjadi 0
Menu utama editor Jenis basic stamp Versi bahasa basic Run
Gambar 2.19 Tampilan basic stamp editor
2.3.2 Memulai Pemrograman di Basic Stamp Editor
Dalam pemrograman, sebuah program lengkap secara umum dapat dibagi menjadi empat bagian penting, yaitu :
1. Header 2. Variabel 3. Program utama 4. Prosedur
Pemrograman dalam basic stamp editor, secara blok dibagi menjadi empat bagian penting.
Contoh program
Gambar 2.20 Urutan bagian dari program dalam basic stamp
2.3.3 Directive
Directiveditulis paling awal program yang dibuat. Bagian ini menentukan
tipe prosesor yang digunakan dan versi dari compiler PBASIC yang digunakan
untuk mengkompile bahasa basic menjadi bahasa mesin. Tampilannya adalah seperti gambar berikut :
Gambar 2.21 Tampilan bagian directive
2.3.4 Menentukan variabel
Menentukan PIN mikrokontroler yang digunakan serta membuat variabel. Ada beberapa ketentuan untuk mendeklarasikan variabel yaitu :
1. PIN: PIN dari mikrokontroler (0-15) 2. VAR: Variabel
Directive
Deklarasi variabel
Program utama
24 3. CON: Konstanta
PIN yang digunakan sudah ditentukan sesuai dengan konfigurasihardware/
mainboard yang digunakan adalah BS2P40. Selain itu dapat membuat variabel
bebas yang nantinya dapat digunakan untuk keperluan perulangan atau yang lainnya.
Gambar 2.22 Tampilan bagian deklarasi variable
Setelah menentukan variabal dan PIN yang digunakan, selanjutnya membuat program utama. Pada bagian program utama bisa melakukan dua mode, yaitu mode pengetikan langsung atau mode pemanggilan prosedur. Mode pengetikan langsung akan efektif jika program tidak terlalu banyak dan hanya untuk menangani kasus yang sederhana. Tetapi jika program sudah mulai banyak, rumit dan lebih dari satu slot, maka sebaiknya program utama memanggil prosedur. Pemanggilan prosedur akan mempermudah urutan/ alur program, lebih terkendali dan mudah dalam pemeriksaan.
2.3.5 Bagian Program Utama
25
Gambar 2.23 Tampilan bagian program utama yang memanggil prosedur
2.3.6 Bagian Prosedur
Berikut ini adalah contoh blok prosedur warna biru yang dipanggil oleh program utama, dapat dilihat pada gambar berikut.
26 Sebuah prosedur harus mempunyai nama prosedur yang disimpan dibagian paling atas prosedur itu sendiri, serta harus diakhiri dengan Return supaya kembali lagi ke program utama dan melanjutkan kembali urutan program berikutnya. Sebuah prosedur mempunyai fungsi khusus, misal untuk prosedur maju ini hanya bertugas untuk menjalankan robot dengan arah maju.
2.3.7 Memeriksa Kebenaran Sintaks Program
Sangat penting untuk memeriksa sintaks program, hal ini kita lakukan untuk memastikan semua sintaks sudah benar. Untuk memeriksa sintaks ini bisa pilih menu RUN, Cek Syntax atau kombinasi tombol CTRL+T. Berikut ini adalah tampilan jika listing program yang kita buat sudah benar.
Gambar 2.25 Hasil pemeriksaan sintaks yang sukses (tokenize successful)
2.3.8 Menjalankan Program
Setelah program selesai, program siap di download ke modul basic stamp. Cara untuk menjalankan program dapat memilih menu RUN atau kombinasi tombol CTR+R. Berikut adalah tampilan jika pendownlodan program sukses.
27
BAB III
PERANCANGAN SISTEM
Bab ini akan membahas tentang perancangan sistem robot pengakut box
berdasarkan perbedaan warna. Pada perancangan sistem ini dibagi menjadi tiga bagian penting, yaitu:
1. Perancangan mekanik. 2. Perancangan perangkat keras. 3. Perancangan perangkat lunak.
3.1 Perancangan Mekanik
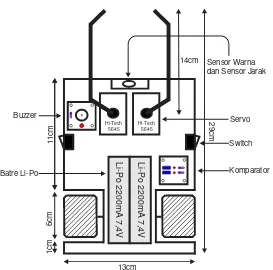
Perancangan mekanik robot, dirancang berdasarkan ukuran dan berat agar robot dapat mengankutboxdengan beban 150 gram. Ukuran dan berat robot yang dirancang adalah sebagai berikut:
1. Panjang Robot : ± 29 cm 2. Lebar Robot : ± 13 cm 3. Berat Robot : ± 970 gram
Gambar 3.1 menunjukkan robot tampak samping dengan penempatan komponen.
Gambar 3.1 Menunjukkan tata letak robot tampak samping.
Letak Rangkaian Elektronik
Tempat Meletakan Batrey
Letak Penempatan
Gripper
Double Gear Box
TX RX
Sensor Garis
Caster
Li-Po 2200mA 7,4V
28
Gambar 3.2 Menunjukkan tata letak robot tampak bagian tengah.
Gambar 3.3 Menunjukkan tata letak robot tampak bagian atas.
29 Penenmpatan Komponen:
1. Mikrokontroler ditempatkan pada bagian atas untuk menjangkau dan mempermudah pemberian input atau output kepada komponen yang lainnya.
2. Regulator ditempatkan pada bagian atas di samping mikrokontroler untuk mempermudah pemberian catu daya kepada komponen yang lainnya seperti mikrokontroler, komparator, servo dan yang lainnya. 3. Komparator ditempatkan pada bagian atas di depan mikrokontroler
sejajar dengan sensor garis yang ditempatkan di bawah, sehingga kabel yang tersambung dari komparator dan sensor garis lurus.
4. Drivermotor ditempatkan pada bagian atas di samping komparator.
5. Catu daya ditempatkan pada bagian tengah atau di bawah mikrokontroler, dikarenakan ukuran yang sangat besar sehingga ditempatkan di tengah dan untuk mempermudah pengecasan atau isi ulang batrey.
6. Switch atau saklar ditempatkan pada bagian tengah dan tataletak di
samping kiri ujung dan kanan ujung. Switch pada bagian kiri untuk mengaktifkandriver motor danswitch pada bagian kanan adalah untuk mengaktifkan komponen regulator.
7. Servo ditempatkan pada bagian tengah depan batrey untuk membuat
gripper, terdiri dari servo bagian kiri dan servo bagian kanan untuk mencapitbox.
8. Buzzer ditempatkan pada bagian tengah samping servo kiri.
9. Sensor warna ditempatkan pada bagian tengah di depan servo agar mempermudah pembacaan warna.
10. Sensor ultrasonik ditempatkan pada bagian tengah di depan servo dan di atas sensor warna agar terjangkau pendeteksianbox.
30 3.2 Perancangan Perangkat Keras (Hardware)
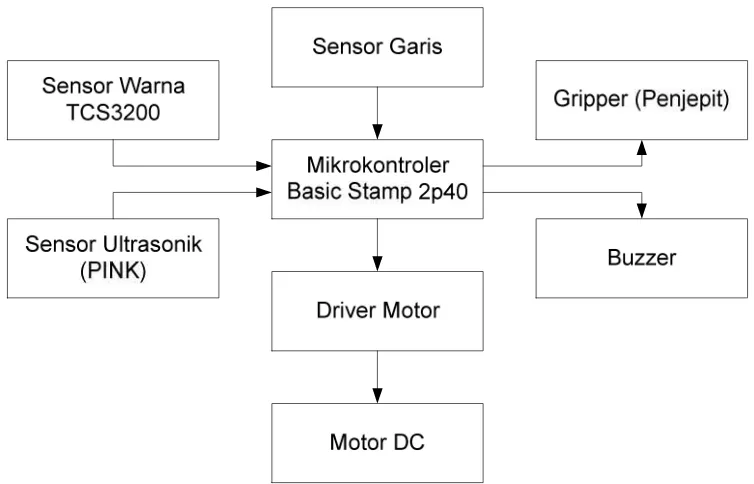
Komponen yang akan di bangun untuk pembuatan robot pengangkut box
berdasarkan perbedaan warna. Gambar 3.4 merupakan gambar diagram blok secara keseluruhan dari sebuah sistem.
Gambar 3.4 Diagram blok sistem.
Penjelasan cara kerja gambar diagram blok sistem secara keseluruhan pada setiap bloknya yaitu:
1. Sensor garis berfungsi sebagai sensor untuk mendeteksi jalur atau garis sehingga robot dapat mengetahui arah jalur dan mengikuti garis tersebut. Setelah itu sensor garis dihubungkan dengan mikrokontroler basic stamp 2P40.
31
3. Driver motor berfungsi sebagai pengendali atau yang menggerakan
motor DC. Setelah itudrivermotor dihubungkan dengan motor DC. 4. Motor DC berfungsi sebagai penggerak roda robot.
5. Sensor jarak sebagai input dihubungkan dengan mikrokontroler, setelah itu mikrokontroler mengeluarakn output. Sensor jarak berfungsi sebagai pendeteksi benda, apabila di depan robot terdapat benda maka robot tidak akan mengambil objek tersebut.
6. Sensor warna sebagai input dihubungkan dengan mikrokontroler, setelah itu mikrokontroler mengeluarkan output. Sensor warna berfungsi sebagai pendeteksi objek berdasarkan perbedaan warna, sehingga robot dapat mengetahi objek warna tersebut.
7. Gripper atau penjepit sebagai output dihubungkan dengan
mikrokontroler, setelah itu mikrokontroler mengeluarkan input.Gripper
atau penjepit berfungsi sebagai pengambil objek.
8. Buzzer sebagai output dihubungkan dengan mikrokontroler, setelah itu
mikrokontroler mengeluarkan input. Buzzer berfungsi sebagai alarm pemberitahu ketika di asal tidak ada box saat menjalankan robot pertama kali.
3.2.1 Mikrokontroler (Basic Stamp 2p40)
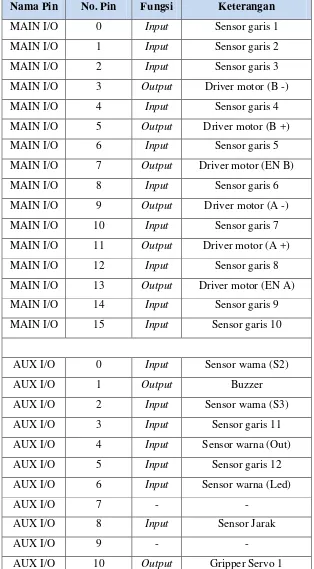
Mikrokontroler yang digunakan pada perancangan robot ini adalah mikrokontroler jenis basic stamp 2P40 dengan 32 port yang dapat digunakan sebagi input atau output. Pemilihan mikrokontroler jenis ini didasari kemampuannya yang cukup handal dan pemrograman yang tidak terlalu sulit. Pada perancangan robot yang dibuat, penulis menggunakan satu buah mikrokontrolerbasic stamp 2p40.
32
Tabel 3.1 Konfigurasi port yang digunakan pada mikrokontroler basic stamp.
Nama Pin No. Pin Fungsi Keterangan
MAIN I/O 0 Input Sensor garis 1
MAIN I/O 1 Input Sensor garis 2
MAIN I/O 2 Input Sensor garis 3
MAIN I/O 3 Output Driver motor (B -)
MAIN I/O 4 Input Sensor garis 4
MAIN I/O 5 Output Driver motor (B +)
MAIN I/O 6 Input Sensor garis 5
MAIN I/O 7 Output Driver motor (EN B)
MAIN I/O 8 Input Sensor garis 6
MAIN I/O 9 Output Driver motor (A -) MAIN I/O 10 Input Sensor garis 7 MAIN I/O 11 Output Driver motor (A +) MAIN I/O 12 Input Sensor garis 8 MAIN I/O 13 Output Driver motor (EN A) MAIN I/O 14 Input Sensor garis 9 MAIN I/O 15 Input Sensor garis 10
AUX I/O 0 Input Sensor warna (S2)
AUX I/O 1 Output Buzzer
AUX I/O 2 Input Sensor warna (S3)
AUX I/O 3 Input Sensor garis 11
AUX I/O 4 Input Sensor warna (Out)
AUX I/O 5 Input Sensor garis 12
AUX I/O 6 Input Sensor warna (Led)
AUX I/O 7 -
-AUX I/O 8 Input Sensor Jarak
AUX I/O 9 -
AUX I/O 11 -
-AUX I/O 12 Output Gripper Servo 2
AUX I/O 13 -
-AUX I/O 14 -
-AUX I/O 15 -
-3.2.2 Sensor Garis
Sensor garis berfungsi untuk mendeteksi warna dari permukaan yang berada dibawah robot line follower dengan maksud agar sensor garis ini dapat mengasilkan logika posisi dari robot line follower terhadap garis tepat berada dibawah robot.
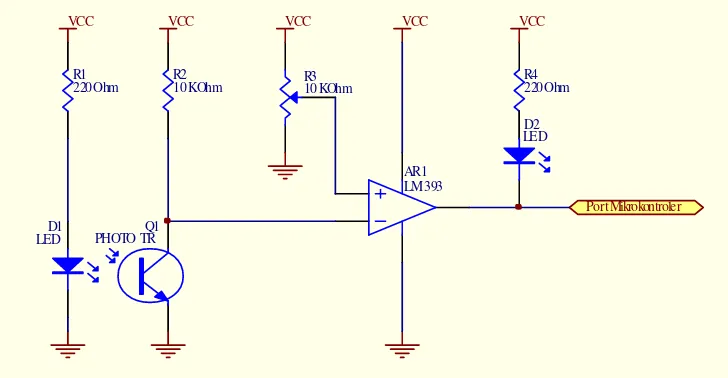
Logika posisi yang dihasilkan oleh sensor garis ini kemudian akan dijadikan inputke mikrokontroler pada robot. Pada sensor garis, komponen yang digunakan yaitu phototransistor sebagai pendeteksi garis hitam dengan dasar putih yang menjadi jalur robot dan LED ( Light Emitting Diode ) superbright
sebagai pemancar cahaya ke lantai yang kemudian dipantulkan dan diterima oleh
phototransistor. Untuk lebih jelasnya memahami prinsip kerja sensor garis dapat
dilihat pada gambar 3.5.
Gambar 3.5 Prinsip kerja sensor garis.
Phototransistor bekerja dengan cara menangkap emisi cahaya yang
dikeluarkan oleh LED. Prinsip kerja dari phototransistor adalah ketika basis menangkap cahaya maka collector akan terhubung dengan emitter dalam hal ini
LED Phototransistor Phototransistor
Garis Hitam Garis Putih
34 transistor bekerja. Phototransistor memiliki mode aktif artinya transistor akan menghasilkan reaksi yang sebanding dengan besaran cahaya yang diterima sampai dengan tingkatan tertentu.
Output dari phototransistor yaitu berupa tegangan. Semakin besar
intensitas cahaya yang didapat maka makin besar pula tegangan yang dihasilkan. Dengan memanfaatkanmodeaktif dariphototransistormaka ditambahkan sebuah komparator sehingga nilai keluaran dari phototransistoryang berupa data analog
dirubah menjadi data digital. Berikut ini adalah rangkaian sensor garis yang dipakai.
Gambar 3.6 Rangkaian sensor garis.
Jumlah sensor yang digunakan adalah 10 sensor yang masing-masing output sensornya dihubungkan ke komparator dan mikrokontroler basic stamp 2p40.
Jarak antar sensor sama dan tata letak berbeda, hal ini bertujuan agar memudahkan dalam mengenali bentuk persimpangan. Untuk lebih jelasnya dapat dilihat pada gambar 3.7.
35
Gambar 3.7 Design bord sensor garis.
Pada sensor garis mempunyai fungsi yang berbeda-beda pada setiap sensor. Untuk lebih jelasnya dapat dilihat pada tabel 3.2
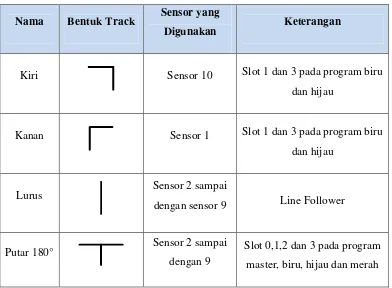
Tabel 3.2 Bentuk belokan dan persimpangan.
Nama Bentuk Track Sensor yang
Digunakan Keterangan
Kiri Sensor 10 Slot 1 dan 3 pada program biru dan hijau
Kanan Sensor 1 Slot 1 dan 3 pada program biru dan hijau
Lurus Sensor 2 sampai
dengan sensor 9 Line Follower
Putar 180° Sensor 2 sampai dengan 9
Slot 0,1,2 dan 3 pada program master, biru, hijau dan merah
5
cm
12cm
36
Kiri Sensor 2 sampai
dengan 9
Slot 0 dan 1 pada program master dan biru
Maju Sensor 2 sampai
dengan 9 Slot 2 pada program hijau
Kanan Sensor 2 sampai
dengan 9 Slot 3 pada program merah
3.2.3 Driver Motor
L298 adalah IC yang dapat digunakan sebagai driver motor DC. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge dikontrol menggunakan level tegangan TTL yang berasal dari output mikrokontroler. L298 dapat mengontrol 2 buah motor DC. Tegangan yang dapat digunakan untuk mengendalikan robot bisa mencapai tegangan 46 VDC dan arus 2 A untuk setiap
kanalnya.
Power supply tegangan yang diberikan ke motor dc sebesar 7.4 VDC yang
berasal dari baterai Li-Po 2200mA, sedangkan untuk tegangan logicpadadriver
motor diberikan tegangan sebesar 5 VDC yang berasal dari mikrokontroler.
Penggunaan dioda pada perancangandrivermotor ini ditujukan agardrivermotor dapat menahan arus balik yang datang dari motordc.
Satu motor dapat dikontrol dengan 3 pin yaitu Aenable, A+ dan A-. Berikut ini adalah tabel kebenaran untuk salah satu motor.
Tabel 3.3 Tabel kebenaran untuk salah satu motor.
AEN A+ A- Reaksi Motor
L L L Motoroff
L L H Motoroff
L H L Motoroff
37
H L L Stop
H H L Berputar searah jarum jam
H L H Berputar berlawanan arah jarum jam
H H H Stop
Keterangan:H =High= 1 dan L =Low= 0
Gambar 3.8 Rangkaian driver motor L298.
Pengontrolan kedua motor kiri dan kanan dibutuhkan 6 port output pada mikrokontroler, yaitu untuk motor kiri masing-masing AEN, A+ , A- dan motor
38
Tabel 3.4 Tabel kebenaran untuk dua motor.
Gerak AEN A+ A- BEN B+
B-Maju H L H H H L
Belok kanan H L H H L H
Belok kiri H H L H H L
Keterangan:H =High= 1 dan L =Low= 0
3.2.4 Sensor Warna (TCS 3200)
Modul sensor warna TCS3200 merupakan pendeteksi warna RGB menggunakan array fotodetektor berupa chip warna dari TAOS TCS3200. Aplikasinya antara lain pada pendeteksi obyek di industri.
Fitur Sensor Warna TCS 3200:
1. Tegangan Kerja : 2.7 - 5.5 V
2. Sensor Array : 8 x 8 photo dioda, 16 photodioda filter merah, 16 photodiodafilterhijau, 16 photodioda tanpa filter.
3. Lensa : 5.3 mm (dalam jarak 25 mm mampu melihat area bujur sangkar dengan sisi 4 mm).
39
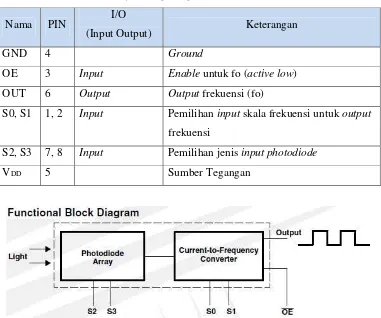
Tabel 3.5 Penjelasan pada pin sensor warna TCS3200.
Nama PIN I/O
(Input Output) Keterangan
GND 4 Ground
OE 3 Input Enableuntuk fo (active low)
OUT 6 Output Outputfrekuensi (fo)
S0, S1 1, 2 Input Pemilihaninputskala frekuensi untukoutput
frekuensi
S2, S3 7, 8 Input Pemilihan jenisinput photodiode
VDD 5 Sumber Tegangan
Gambar 3.10. Sketsa fisik dan blok fungsional TCS3200.
Setiap warna bisa disusun dari warna dasar. Untuk cahaya, warna dasar penyusunnya adalah warna Merah, Hijau dan Biru, atau lebih dikenal dengan istilah RGB (Red-Green-Blue).
Photodiode pada IC TCS3200 disusun secara array 8x8 dengan
konfigurasi: 16 photodiode untuk memfilter warna merah, 16 photodiode untuk memfilter warna hijau, 16 photodiode untuk memfilter warna biru, dan 16
photodiodetanpafilter. Kelompok photodiode mana yang akan dipakai bisa diatur
40
Tabel 3.6 Kombinasi fungsi dari S2 dan S3.
S2 S3 Photodiode yang aktif
0 0 Pemfilter Merah
0 1 Pemfilter Biru
1 0 Tanpa Filter
1 1 Pemfilter Hijau
Photodiode akan mengeluarkan arus yang besarnya sebanding dengan
kadar warna dasar cahaya yang menimpanya. Arus ini kemudian dikonversikan menjadi sinyal kotak dengan frekuensi sebanding dengan besarnya arus. Frekuensi
Outputini bisa diskala dengan mengatur kaki selektor S0 dan S1.
3.2.5 Sensor Ultrasonik
Alasan saya menggunakan sensor ping hanya mempunyai 3 buah pin yang digunakan. PIN sebelah kiri digunakan untuk ground, PIN di tengah digunakan untuk sinyal/ data dan PIN yang sebealah kanan digunakan untuk VCC (tempat masuknya arus).
Jarak dapat diketahui dengan menghitung waktu yang dibutuhkan oleh gelombang ultrasonik sejak awal pengiriman sampai kembali ke penerima gelombang. Berikut ini adalah gambar cara kerja sensor ultrasonic menerima dan mengirim sinyal.
41 Kelebihan sensor ini ialah hanya membutuhkan 1 sinyal (SIG), selain jalur 5V dan ground. Sensor ping mendeteksi jarak obyek dengan cara memancarkan gelombang ultrasonik (40 KHz) selama tBURST (200 us) kemudian mendeteksi
pantulannya. Sensor ping memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroler pengendali (pulsa trigger dengan tOUT min 2 us).
Spesifikasi sensor ini:
1. Kisaran pengukuran 3cm-3m.
2. Input trigger–positiveTTLpulse, 2 uS min., 5 uS tipikal.
3. Echo hold off750uS darifall of trigger pulse.
4. Delay before next measurement200 uS.
5. Burst indicatorLED menampilkan aktifitas sensor.
Gelombang ini melalui udara dengan kecepatan 344 m/s, lalu mengenai obyek dan memantul kembali ke sensor. Ping mengeluarkan pulsa output high
pada pin SIG setelah memancarkan gelombang ultrasonik dan setelah gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG. Lebar pulsa
High(tIN) akan sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x
jarak ukur dengan obyek. Keluaran dari pin SIG ini yang dihubungkan ke salah satuportdi mikrokontroler.
3.2.6 Catu Daya
Catu daya merupakan faktor pendukung terpenting, karena hampir keseluruhan komponen hardware pada robot membutuhkan tegangan untuk mengoperasikannya. Catu daya yang dibutuhkan sebanyak 2 buah, pertama untuk mencatu mikrokontroler sensor garis, servo dan yang lainnya. Kedua, tegangan actuator berupa motor DC.
Tegangan yang digunakan berasal dari 1 buah baterai rechargeable
42 tegangan 5 volt, IC tersebut yaitu IC LM2940. Berikut ini adalah gambar IC LM2940, skematik regulator dan rangkaian sumber tegangan.
Gambar 3.12 (a) IC LM2940 (b) Skematik regulator 5 volt
Gambar 3.13 Rangkaian sumber tegangan robot.
3.2.7 Gripper
Gripperdigunakan untuk mengangkat box yang ada di asal yang akan di
pindahkan ke tujuan. Gripper di design disesuaikan dengan bentuk objek yaitu
box. berikut ini adalah gambar designgripperyang digunakan.
43
Gambar 3.14 Desaign gripper dengan dua servo.
Dari gambar diatas terlihat dimensi dari gripper. Pada gripper terdapat 2 mini servo sebagai penggerakgripper.
3.2.8 BOX
Box adalah objek yang akan digunakan untuk mengambil benda berupa
objekbox yang terdiri dari 3 warna box yaitu warna box merah, warna box hijau
dan warnaboxbiru. Box tersebut mempunyai beban berat sekitar ± 150 gram dan
panjangbox± 6,5 cm serta lebarboxyaitu ± 5,5 cm. Berikut gambar objek berupa
boxseperti gambar dibawah ini.
2cm
HiTec HS 5645 MG
HiTec HS 5645 MG
2cm
6cm 5cm
4
7
.6
9
m
m
44
Gambar 3.15 Desaign box.
3.2.9 Miniatur Track Robot
Berikut ini adalah bentuk track yang akan digunakan dengan spesifikasi sebagai berikut:
1. Bahan yang digunakan dari kertas duplex dua buah dengan cara di tempelkan menggunakan solasi bening.
2. Untuk track atau garis dalam lintasan berwarna hitam menggunakan solasi warna hitam berukuran lebar 1,3 cm.
3. Panjangtrack± 140,5 cm dan lebartrack84 cm.
Gambar 3.16 memperlihatkan miniature track yang akan digunakan dalam robot berjalan.
Gambar 3.16 Miniature track robot
6,5cm 6,5cm 6,5cm
150 gram
150 gram
150 gram
3.3 Perancangan Perangkat Lunak (Software)
Setelah dalam pembuatan perangkat keras selesai, bagian yang paling penting dalam pembuatan tugas akhir ini yaitu dalam merancang suatu perangkat lunak. Perancangan algoritma sangat penting untuk setiap sistem kendali. Sehingga dibuat algoritma keseluruhan untuk sistem kendali robot agar dapat berjalan sesuai dengan keinginan. Dalam tugas akhir ini, perancangan flowchart dibagi menjadi empat bagian yaitu:
1. Program Master 2. Program Biru 3. Program Hijau 4. Program Merah
Berikut adalah program yang terdiri dari program master di slot 0, program biru di slot 1, program hijau di slot 2 dan program merah di slot 3.
Gambar 3.17 Tampilan program yang terdiri dari 4 slot.
46
Belok Kanan Diam Cek Benda
PINK
47
Tabel 3.7 Penjelasan flowchart program master.
No Keterangan
a Memulai awal program.
b Pendeklarasian program. Pengaturan nama kompiler, konfigurasi pin-pin dan deklarasi variabel.
c Memberikan nilai awal mulai dari A = 0 dan B = 0.
d Pengecekan apakah variable pindah = 2.
e Apabila pengecekan variable pindah = 2 benar, maka nilai A = 1 dan nilai B = 1.
f Kondisi awal robot membukagripper.
g Kondisi driver motor jalan, terdiri dari Aen dan Ben. h Pengecekan jika sensor garis yang di Pin 0 = 0 .
i Pengecekan jika sensor garis yang di Pin 0 = 0 maka robot jalan ke kiri tajam.
j Pengecekan jika sensor garis yang di Pin 2 = 0.
k Pengecekan jika sensor garis yang di Pin 2 = 0 maka robot jalan ke kiri banyak.
l Pengecekan jika sensor garis yang di Pin 4 = 0.
m Pengecekan jika sensor garis yang di Pin 4 = 0 maka robot jalan ke kiri sedikit.
n Pengecekan jika sensor garis yang di Pin 6 = 0.
o Pengecekan jika sensor garis yang di Pin 6 = 0 maka robot jalan lurus.
p Pengecekan jika sensor garis yang di Pin 8 = 0.
q Pengecekan jika sensor garis yang di Pin 8 = 0 maka robot jalan lurus.
r Pengecekan jika sensor garis yang di Pin 10 = 0.
48 t Pengecekan jika sensor garis yang di Pin 12 = 0.
u Pengecekan jika sensor garis yang di Pin 12 = 0 maka robot jalan ke kanan banyak.
v Pengecekan jika sensor garis yang di Pin 14 = 0.
w Pengecekan jika sensor garis yang di Pin 14 = 0 maka robot jalan ke kanan tajam.
x Pengecekan jika sensor garis yang di Pin 1 = 0
y Pengecekan jika sensor garis yang di Pin 1 = 0 maka robot jalan belok kanan 90º.
z Pengecekan jika sensor garis yang di Pin 00000000=0
aa Pengecekan jika nilai A = 0.
ab Pengecekan jika nilai A = 0 maka A = A + 1.
ac Setelah itu robot berjalan belok kiri 90º.
ad Pengecekan jika nilai B = 0.
ae Pengecekan jika nilai B = 0 maka panggil prosedur diam.
af Pengecekan jika nilai B≠ 0.Maka nilai B = B + 1.
ag Panggil prosedur cek benda.
ah Panggil prosedur PINK.
ai Pengecekan jika nilai jarak <= 7.
aj Pengecekan jika nilai jarak > 7. Maka buzzer bunyi member peringatan.
ak Pengecekan jika nilai jarak <= 7. Makagrippermencapit
box.
al Panggil prosedur cek warna.
49 an
Pengecekan jika nilai blue > green dan blue > red. Maka jalankan program slot 1. Program jalannya robot menuju tujuan warna biru.
ao Lompat ke flowchart selanjutnya A.
ap Pengecekan jika nilai green > blue dan green > red
aq
Pengecekan jika nilai green > blue dan green > red. Maka jalankan program slot 2. Program jalannya robot menuju tujuan warna hijau.
ar Lompat ke flowchart selanjutnya B.
as Pengecekan jika nilai red > blue dan red > green.
at
Pengecekan jika nilai red > blue dan red > green. Maka jalankan program slot 3. Program jalannya robot menuju tujuan warna merah.
50
51
Tabel 3.8 Penjelasan flowchart program biru.
No Keterangan
a Memulai awal program A.
b Pendeklarasian program. Pengaturan nama kompiler, konfigurasi pin-pin dan deklarasi variabel.
c Memberikan nilai variable pindah = 2.
d Memberikan nilai awal mulai dari A = 0, B = 0, C = 0, D = 0 dan E = 0.
e Kondisi driver motor jalan, terdiri dari Aen dan Ben.
f Setelah itu robot berputar 180º ke kanan.
g Pengecekan jika sensor garis yang di Pin 0 = 0 .
h Pengecekan jika sensor garis yang di Pin 0 = 0 maka robot jalan ke kiri tajam.
i Pengecekan jika sensor garis yang di Pin 2 = 0.
j Pengecekan jika sensor garis yang di Pin 2 = 0 maka robot jalan ke kiri banyak.
k Pengecekan jika sensor garis yang di Pin 4 = 0.
l Pengecekan jika sensor garis yang di Pin 4 = 0 maka robot jalan ke kiri sedikit.
m Pengecekan jika sensor garis yang di Pin 6 = 0.
n Pengecekan jika sensor garis yang di Pin 6 = 0 maka robot jalan lurus.
o Pengecekan jika sensor garis yang di Pin 8 = 0.
p Pengecekan jika sensor garis yang di Pin 8 = 0 maka robot jalan lurus.
q Pengecekan jika sensor garis yang di Pin 10 = 0.
r Pengecekan jika sensor garis yang di Pin 10 = 0 maka robot jalan ke kanan sedikit.
52 t Pengecekan jika sensor garis yang di Pin 12 = 0 maka
robot jalan ke kanan banyak.
u Pengecekan jika sensor garis yang di Pin 14 = 0.
v Pengecekan jika sensor garis yang di Pin 14 = 0 maka robot jalan ke kanan tajam.
w Pengecekan jika sensor garis yang di Pin 1 = 0.
x Pengecekan jika nilai D = 1.
y Pengecekan jika nilai D = 1. Maka setelah itu robot akan belok 90º ke kanan.
z Pengecekan jika nilai D≠ 1. Maka nilai D = D + 1.
aa Pengecekan jika sensor garis yang di Pin 15 = 0.
ab Pengecekan jika nilai E = 1.
ac Pengecekan jika nilai E = 1. Maka nilai E = E + 1.
ad Pengecekan jika nilai E = 1. Maka setelah itu robot akan belok 90º ke kiri.
ae Pengecekan jika nilai E≠ 1. Maka nilai E = E–1.
af Pengecekan jika sensor garis yang di Pin 00000000=0.
ag Pengecekan jika nilai A = 0.
ah Pengecekan jika nilai A = 0. Maka nilai A = A + 1
ai Pengecekan jika nilai A = 0. Maka setelah itu robot akan belok 90º ke kiri.
aj Pengecekan jika nilai B = 0.
ak Pengecekan jika nilai B= 0. Maka nilai B = B + 1.
53 am Pengecekan jika nilai C = 0.
an Pengecekan jika nilai C= 0. Maka nilai C = C + 1.
ao Pengecekan jika nilai C = 0. Maka setelah itu robot akan belok 90º ke kanan.
ap Pengecekan jika nilai C≠ 0. Maka panggil prosedur cek benda.
aq Pengecekan jika nilai C≠ 0. Maka panggil prosedur PINK.
ar Pengecekan jika nilai jarak <= 7.
as Pengecekan jika nilai C≠ 0. Maka setelah itu robot akan berputar 180º ke kanan.
at Jalankan program slot 0. Kembali lagi ke program master atau ke program utama.
au Pengecekan jika nilai jarak <= 7. Makagrippermencapit
box.
av Panggil prosedur cek warna.
aw Pengecekan jika nilai blue > green dan blue > red
ax
Pengecekan jika nilai blue > green dan blue > red. Maka jalankan program slot 1. Program jalannya robot menuju tujuan warna biru.
ay Lompat ke flowchart selanjutnya A.
az Pengecekan jika nilai green > blue dan green > red
ba
Pengecekan jika nilai green > blue dan green > red. Maka jalankan program slot 2. Program jalannya robot menuju tujuan warna hijau.
bb Lompat ke flowchart selanjutnya B.
54 bd
Pengecekan jika nilai red > blue dan red > green. Maka jalankan program slot 3. Program jalannya robot menuju tujuan warna merah.
55
Jarak <= 7 Gripper Tutup
Putar 180▪
56
Tabel 3.9 Penjelasan flowchart program hijau.
No Keterangan
a Memulai awal program B.
b Pendeklarasian program. Pengaturan nama kompiler, konfigurasi pin-pin dan deklarasi variabel.
c Memberikan nilai variable pindah = 2.
d Memberikan nilai awal mulai dari A = 0, B = 0 dan C = 0
e Kondisi driver motor jalan, terdiri dari Aen dan Ben.
f Setelah itu robot berputar 180º ke kanan.
g Pengecekan jika sensor garis yang di Pin 0 = 0 .
h Pengecekan jika sensor garis yang di Pin 0 = 0 maka robot jalan ke kiri tajam.
i Pengecekan jika sensor garis yang di Pin 2 = 0.
j Pengecekan jika sensor garis yang di Pin 2 = 0 maka robot jalan ke kiri banyak.
k Pengecekan jika sensor garis yang di Pin 4 = 0.
l Pengecekan jika sensor garis yang di Pin 4 = 0 maka robot jalan ke kiri sedikit.
m Pengecekan jika sensor garis yang di Pin 6 = 0.
n Pengecekan jika sensor garis yang di Pin 6 = 0 maka robot jalan lurus.
o Pengecekan jika sensor garis yang di Pin 8 = 0.
p Pengecekan jika sensor garis yang di Pin 8 = 0 maka robot jalan lurus.
q Pengecekan jika sensor garis yang di Pin 10 = 0.
r Pengecekan jika sensor garis yang di Pin 10 = 0 maka robot jalan ke kanan sedikit.
57 t Pengecekan jika sensor garis yang di Pin 12 = 0 maka
robot jalan ke kanan banyak.
u Pengecekan jika sensor garis yang di Pin 14 = 0.
v Pengecekan jika sensor garis yang di Pin 14 = 0 maka robot jalan ke kanan tajam.
w Pengecekan jika sensor garis yang di Pin 00000000=0.
x Pengecekan jika nilai A = 0.
y Pengecekan jika nilai A = 0. Maka nilai A = A + 1
z Pengecekan jika nilai A = 0. Maka setelah itu robot akan maju.
aa Pengecekan jika nilai B = 0.
ab Pengecekan jika nilai B= 0. Maka nilai B = B + 1.
ac Pengecekan jika nilai B = 0. Maka setelah itu robot akan panggil prosedur simpan.
ad Pengecekan jika nilai C = 0.
ae Pengecekan jika nilai C= 0. Maka nilai C = C + 1.
af Pengecekan jika nilai C = 0. Maka setelah itu robot akan maju.
ag Pengecekan jika nilai C≠ 0. Maka panggil prosedur cek benda.
ah Pengecekan jika nilai C≠ 0. Maka panggil prosedur PINK.
ai Pengecekan jika nilai jarak <= 7.
aj Pengecekan jika nilai C≠ 0. Maka setelah itu robot akan berputar 180º ke kanan.
58 al Pengecekan jika nilai jarak <= 7. Makagrippermencapit
box.
am Panggil prosedur cek warna.
an Pengecekan jika nilai blue > green dan blue > red
ao
Pengecekan jika nilai blue > green dan blue > red. Maka jalankan program slot 1. Program jalannya robot menuju tujuan warna biru.
ap Lompat ke flowchart selanjutnya A.
aq Pengecekan jika nilai green > blue dan green > red
ar
Pengecekan jika nilai green > blue dan green > red. Maka jalankan program slot 2. Program jalannya robot menuju tujuan warna hijau.
as Lompat ke flowchart selanjutnya B.
at Pengecekan jika nilai red > blue dan red > green.
au
Pengecekan jika nilai red > blue dan red > green. Maka jalankan program slot 3. Program jalannya robot menuju tujuan warna merah.
59
60
Tabel 3.10 Penjelasan flowchart program merah.
No Keterangan
a Memulai awal program C.
b Pendeklarasian program. Pengaturan nama kompiler, konfigurasi pin-pin dan deklarasi variabel.
c Memberikan nilai variable pindah = 2.
d Memberikan nilai awal mulai dari A = 0, B = 0, C = 0, D = 0 dan E = 0.
e Kondisi driver motor jalan, terdiri dari Aen dan Ben.
f Setelah itu robot berputar 180º ke kanan.
g Pengecekan jika sensor garis yang di Pin 0 = 0 .
h Pengecekan jika sensor garis yang di Pin 0 = 0 maka robot jalan ke kiri tajam.
i Pengecekan jika sensor garis yang di Pin 2 = 0.
j Pengecekan jika sensor garis yang di Pin 2 = 0 maka robot jalan ke kiri banyak.
k Pengecekan jika sensor garis yang di Pin 4 = 0.
l Pengecekan jika sensor garis yang di Pin 4 = 0 maka robot jalan ke kiri sedikit.
m Pengecekan jika sensor garis yang di Pin 6 = 0.
n Pengecekan jika sensor garis yang di Pin 6 = 0 maka robot jalan lurus.
o Pengecekan jika sensor garis yang di Pin 8 = 0.
p Pengecekan jika sensor garis yang di Pin 8 = 0 maka robot jalan lurus.
q Pengecekan jika sensor garis yang di Pin 10 = 0.
r Pengecekan jika sensor garis yang di Pin 10 = 0 maka robot jalan ke kanan sedikit.
61 t Pengecekan jika sensor garis yang di Pin 12 = 0 maka
robot jalan ke kanan banyak.
u Pengecekan jika sensor garis yang di Pin 14 = 0.
v Pengecekan jika sensor garis yang di Pin 14 = 0 maka robot jalan ke kanan tajam.
w Pengecekan jika sensor garis yang di Pin 1 = 0.
x Pengecekan jika nilai E = 1.
y Pengecekan jika nilai E = 1. Maka setelah itu robot akan belok 90º ke kanan.
z Pengecekan jika nilai E≠ 1. Maka nilaiE = E + 1.
aa Pengecekan jika sensor garis yang di Pin 15 = 0.
ab Pengecekan jika nilai D = 0.
ac Pengecekan jika nilai D = 0. Maka nilai D = D + 1.
ad Pengecekan jika nilai D = 0. Maka setelah itu robot akan belok 90º ke kiri.
ae Pengecekan jika nilai D≠0. Maka nilai D = D–1.
af Pengecekan jika sensor garis yang di Pin 00000000=0.
ag Pengecekan jika nilai A = 0.
ah Pengecekan jika nilai A = 0. Maka nilai A = A + 1
ai Pengecekan jika nilai A = 0. Maka setelah itu robot akan belok 90º ke kanan.
aj Pengecekan jika nilai B = 0.
ak Pengecekan jika nilai B= 0. Maka nilai B = B + 1.
62 am Pengecekan jika nilai C = 0.
an Pengecekan jika nilai C= 0. Maka nilai C = C + 1.
ao Pengecekan jika nilai C = 0. Maka setelah itu robot akan belok 90º ke kiri.
ap Pengecekan jika nilai C≠ 0. Maka panggil prosedur cek benda.
aq Pengecekan jika nilai C≠ 0. Maka panggil prosedur PINK.
ar Pengecekan jika nilai jarak <= 7.
as Pengecekan jika nilai C≠ 0. Maka setelah itu robot akan berputar 180º ke kanan.
at Jalankan program slot 0. Kembali lagi ke program master atau ke program utama.
au Pengecekan jika nilai jarak <= 7. Makagrippermencapit
box.
av Panggil prosedur cek warna.
aw Pengecekan jika nilai blue > green dan blue > red
ax
Pengecekan jika nilai blue > green dan blue > red. Maka jalankan program slot 1. Program jalannya robot menuju tujuan warna biru.
ay Lompat ke flowchart selanjutnya A.
az Pengecekan jika nilai green > blue dan green > red
ba
Pengecekan jika nilai green > blue dan green > red. Maka jalankan program slot 2. Program jalannya robot menuju tujuan warna hijau.
bb Lompat ke flowchart selanjutnya B.
63 bd
Pengecekan jika nilai red > blue dan red > green. Maka jalankan program slot 3. Program jalannya robot menuju tujuan warna merah.
be Lompat ke flowchart selanjutnya C.
3.3.1 Subroutine Pergerakan Robot
PadaSubroutine ini terdiri beberapa instuksi agar robot dapat berputar atau
belok, maju dan berhenti.Subroutineini dipanggil ketika robot menemui belokan dan persimpangan. Berikut adalah gambar flowchart subroutine:
Awal Subroutine
64
Tabel 3.11 Penjelasan diagram alir subroutine belok kiri.
No Keterangan
a Memulai awalsubroutinebelok kiri.
b Inisialisasi pin yang dihubungkan ke B+ dan A+.
c Inisialisasi pin yang dihubungkan ke B+ dan A+ agar roda berputar maju lurus.
d Jika sensor 9 = 1 maka berhenti belok kiri.
e Inisialisasi pin yang dihubungkan ke B- dan A+.
f Inisialisasi pin yang dihubungkan ke B- dan A+ agar roda berputar belok kiri.
g Jika sensor 7 = 1 maka berhenti belok kiri.
h Inisialisasi pin yang dihubungkan ke B- dan A+.
i Inisialisasi pin yang dihubungkan ke B- dan A+ agar roda berputar belok kiri.
j Inisialisasi pin yang dihubungkan ke B- dan A+
k Inisialisasi pin yang dihubungkan ke B+ dan A- agar roda berputar belok kanan memberhentikan belok kiri (break). l Keluar dari subroutine dan kembali mengeksekusi