MIKROKONTROLER
TUGAS AKHIR
Diajukan sebagai salah satu syarat untuk memperoleh gelar Ahli Madya
Oleh:
FAJAR MULIANUR
1301042018
PROGRAM STUDI TEKNIK ELEKTRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI PADANG
2016
Robot merupakan salah satu alat dalam bidang elektronika yang dapat digunakan dalam berbagai keperluan manusia, misalnya robot mata-mata, robot penjelajah, robot penyelamat, robot industri, dan juga robot untuk perlombaan. Secara teknis, robot dapat dikendalikan secara otomatis, maupun dikendalikan secara manual. Dari beberapa data yang telah penulis dapatkan, kebanyakan robot yang digunakan adalah mobile robot, atau juga dapat disebut sebagai robot bergerak. Mobile robot merupakan robot yang bergerak dengan menggunakan aktuator berupa roda, kegagalan yang terjadi pada robot saat melintasi jalur yang ada hambatan atau halangan, misalnya hambatan berupa dinding, robot seringkali menabrak obyek yang berada didepannya, robot seringkali menabrak obyek yang berada didepannya. Oleh karena itu penulis terinspirasi untuk merancang sebuah sistem pengatur kecepatan pada robot mobile berdasarkan jarak dengan hambatan berbasis mikrokontroler.
Sistem pengatur kecepatan pada robot mobile ini menggunakan mikrokontroler ATMega 328 sebagai kontroler, modul sensor ultrasonik HC-SR04 sebagai pendeteksi jarak, LCD sebagai display untuk menampilkan jarak yang dideteksi dan nilai PWM, buzzer sebagai media untuk mengeluarkan suara peringatan, dan motor DC obyek sebagai pengatur kecepatan. Putaran dari motor DC diatur dengan mengolah lebar pulsa PWM pada mikrokontroler ATMega 328.
Ketika jarak antara robot dan objek yang dideteksi oleh modul sensor HC-SR04 telah mencapai jarak kurang dari 50 cm, maka mikrokontroler akan mengaktifkan suara peringatan melalui buzzer. Dan kecepatan putaran motor DC akan dikurangi dengan mengurangi nilai lebar pulsa PWM, sehingga robot akan melambat, disaat jarak yang dideteksi 10 cm maka robot akan berbelok untuk menghindari hambatan didepannya dan robot tidak akan menabrak obyek yang ada didepannya.
Kata kunci (key words) : Robot, Mikrokontroler, Sensor HC-SR04, Liquid
KATA PENGANTAR
Puji dan Syukur kehadirat Allah SWT, berkat Rahmat dan karunia-Nya, penulis telah dapat menyelesaikan laporan tugas akhir yang berjudul “Sistem Pengatur Kecepatan Pada Robot Mobile Berdasarkan Jarak Dengan Hambatan Berbasis Mikrokontroler”. Shalawat beserta Salam tidak lupa penulis do’a kan kepada Allah SWT agar selalu disampaikan-Nya kepada Nabi Besar Muhammad SAW, yang telah merubah akhlak manusia menuju akhlak terpuji yang disinari Iman dan Islam berlandaskan Ilmu pengetahuan seperti yang sama-sama kita rasakan pada saat sekarang ini.
Laporan ini disusun dengan tujuan untuk memenuhi salah satu persyaratan dalam menyelesaikan perkuliahan pada Program Studi Teknik Elektronika, Politeknik Negri Padang Tahun 2016.
Dalam menyelesaikan laporan ini, Penulis banyak mendapatkan bantuan dan dorongan dari berbagai pihak. Oleh karena itu penulis mengucapkan terima kasih kepada:
1. Kedua Orang Tua tercinta yang dengan susah payah memberikan berbagai motivasi sehingga penulis dapat menyelesaikan tugas akhir ini sebaik mungkin dan dengan tepat waktu. Kemudian terima kasih juga untuk seluruh keluarga besar penulis yang telah memberikan do’a dan dukungan kepada penulis.
2. Ibu Nadia Alfitri.ST.,MT , selaku pembimbing I. 3. Ibu Era Madona.SST.,M.Sc selaku pembimbing II.
4. Bapak Aidil Zamri, ST.,MT selaku Direktur Politeknik Negeri Padang.
5. Bapak Afrizal Yuhanef, ST.,M.Kom selaku Ketua Jurusan Teknik Elektro Politeknik Negeri Padang.
6. Bapak Herizon, ST.,MT selaku Ketua Program Studi Teknik Elektronika Politeknik Negeri Padang.
7. Ibu dan Bapak dari Tim Penguji yang telah bersedia hadir pada sidang Tugas Akhir.
8. Teman-teman satu program studi terutama kelas 3CEC.
9. Untuk semua pihak yang telah membantu penulis sampai laporan ini selesai tepat pada waktunya.
Penulis berharap semoga laporan Tugas Akhir ini dapat bermanfaat bagi penulis khususnya dan bagi pembaca umumnya. Sekiranya ada kesalahan dalam penulisan laporan ini, penulis mengharapkan kritik dan saran yang membangun demi kesempurnaan penulisan selanjutnya.
Padang, September 2016
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... viii
DAFTAR LAMPIRAN ... x BAB I PENDAHULUAN 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 2 1.3 Tujuan... 2 1.4 Batasan Masalah ... 3 1.5 Manfaat... 3 1.6 Sistematika Penulisan ... 3
BAB II LANDASAN TEORI 2.1 Mobile Robot ... 5
2.2 Arduino Uno R3 ... 5
2.3 Sensor Ultrasonik HC-SR04 ... 7
2.4 LCD ... 8
2.8 PWM (Pulse Witdh Modulation) ... 15
BAB III PERANCANGAN DAN PEMBUATAN ALAT 3.1 Perancangan dan Pembuatan Hardware ... 19
3.1.1 Perancangan Hardware ... 19
3.3 Rangkaian Mikrokontroler Arduino ... 21
3.4 Rangkaian Display LCD ... 21 3.5 Driver Motor DC ... 23 3.6 Perancangan Motor DC ... 25 3.7 Perancangan PWM ... 25 3.8 Rangkaian Buzzer ... 26 3.9 Pembuatan Hardware ... 28
3.10 Pembuatan Bagian Elektronik ... 29
3.11 Pembuatan Bagian Mekanik ... 30
3.12 Perancangan dan Pembuatan Software ... 32
3.12.1 Perancangan Software ( Flowchart Program ) ... 32
BAB IV PENGUJIAN DAN ANALISA 4.1 Pengujian Hardware dan Software ... 33
4.1.1 Pengujian dan analisa modul sensor HC-SR04 ... 33
4.1.5 Pengujian dan analisa rangkaian buzzer... 49 4.2 Pengujian dan analisa alat ... 50
BAB V PENUTUP
5.1 Kesimpulan ... 53 5.2 Saran ... 54
DAFTAR PUSTAKA ... 55 LAMPIRAN
DAFTAR TABEL
Tabel 1. Karakteristik Arduino Uno R3 ...7
Tabel 2. Konfigurasi fungsi PIN LCD ...9
Tabel 3. Koneksi pin dari sensor ultrasonik HC-SR04 ke Mikrokontroler ..20
Tabel 4. Konfigurasi hubungan kaki LCD dengan Arduino ...22
Tabel 5. Tampilan LCD pada jarak 50 cm ...23
Tabel 6. Tampilan LCD pada jarak 20 cm ...23
Tabel 7. Tampilan LCD pada jarak 10 cm ...23
Tabel 8. Koneksi Pin mikrokontroler ke pin IC L293D ...24
Tabel 9. Rancangan putaran motor DC1 dan motor DC2 ...25
Tabel 10. Perancangan nilai PWM untuk driver motor DC ...26
Tabel 11. Rancangan pengaktifan buzzer ...27
Tabel 12. Daftar alat dan bahan yang digunakan ...28
Tabel 13. Hasil Pengukuran Modul Sensor HC-SR04 ...35
Tabel 14. Hasil perbandingan jarak dengan perhitungan rumus ...40
Tabel 15. Hasil Pengukuran Modul Sensor HC-SR04 pada objek berbeda ...41
Tabel 16. Hasil pengukuran dan pengujian rangkaian display LCD...42
Tabel 17. Hasil pengukuran logika putaran IC L293D saat motor aktif ...44
Tabel 18. Logika putaran motor untuk IC driver L293D ...45
Tabel 19. Hasil pengujian rangkaiian buzzer ...50
Gambar 1. Robot mobile ... 5
Gambar 2. Mikrokontroller Arduino Uno R3... 6
Gambar 3. Skema Papan Arduino ... 6
Gambar 4. Sensor Ultrasonik HC-SR04 ... 8
Gambar 5. Sistem kerja sensor ultrasonik ... 8
Gambar 6. LCD ... 9
Gambar 7. Rangkaian H-bridge transistor ... 11
Gambar 8. Susunan pin IC L293D ... 11
Gambar 9. Struktur dasar IC L293D ... 12
Gambar 10. Kontruksi motor DC ... 13
Gambar 11. Motor DC ... 14
Gambar 12. Simbol buzzer... 15
Gambar 13. Prinsip dasar gelombang PWM ... 16
Gambar 14. Blok Diagram Sistem Secara Keseluruhan ... 17
Gambar 15. Rangkaian sensor ultrasonik HC-SR04 ... 20
Gambar 16. Rangkaian Mikrokontroler keseluruhan ... 21
Gambar 17. Koneksi kaki LCD ke arduino ... 22
Gambar 18. Rangkaian driver L293D ke arduino ... 24
Gambar 19. Input PWM pada IC L293D ... 26
Gambar 20. Rangkaian koneksi buzzer ke mikrokontroler... 27
Gambar 21. Proses pembuatan bagian elektronik ... 30
Gambar 23. Flowchart program ... 32
Gambar 24. Rangkaian pengujian rangkaian sensor HC-SR04 ... 34
Gambar 25. Pengujian modul sensor HC-SR04 ... 34
Gambar 26. Gelombang tegangan kaki trigger pada jarak 150 cm ... 37
Gambar 27. Gelombang tegangan kaki trigger pada jarak 100 cm ... 38
Gambar 28. Gelombang tegangan kaki trigger pada jarak 50 cm ... 39
Gambar 29. Gelombang tegangan kaki Echo pada jarak 150 ... 39
Gambar 30. Gelombang tegangan kaki Echo pada jarak 100 ... 40
Gambar 31. Gelombang tegangan kaki Echo pada jarak 50 ... 40
Gambar 32. Rangkaian pengujian LCD ... 43
Gambar 33. Hasil pengujian rangkaian display LCD ... 44
Gambar 34. Rangkaian pengujian driver motor DC IC L293D ... 44
Gambar 35. Gelombang tegangan PWM 250 ... 47
Gambar 36. Gelombang tegangan PWM 150 ... 48
Gambar 37. Gelombang tegangan PWM 130 ... 48
Gambar 38. Gelombang tegangan PWM 150 ... 49
Gambar 39. Rangkaian pengujian buzzer ... 50
1.1. Latar Belakang
Robot merupakan salah satu alat dalam bidang elektronika yang dapat digunakan dalam berbagai keperluan manusia, misalnya robot mata-mata, robot penjelajah, robot penyelamat, robot industri, dan juga robot untuk perlombaan. Secara teknis, robot dapat dikendalikan secara otomatis, maupun dikendalikan secara manual. Mobile robot merupakan robot yang bergerak dengan menggunakan aktuator berupa roda, misalnya yang digunakan sebagai penjelajah luar angkasa, pengepel lantai, dan perlombaan robot cerdas.
Dan dengan adanya perkembangan ilmu pengetahuan dan teknologi maka suatu sistem keamanan pada mobile robot dapat dibuat, yaitu dengan mengembangkan suatu sistem pengatur kecepatan pada robot mobile. Dengan jarak aman tertentu yang sudah ditentukan, robot mobile akan dirancang secara otomatis menyesuaikan kecepatannya terhadap jarak dengan obyek didepannya. Apabila jarak robot mobile dengan obyek didepannya lebih jauh dari jarak aman, maka kecepatan akan ditambah. Sedangkan kecepatan akan dikurangi atau bahkan dihentikan apabila jarak dengan obyek didepannya sudah lebih dekat dari pada jarak aman. Penyesuaian kecepatan secaraa otomatis tersebut akan menambah faktor keamanan pada robot mobile.
Input yang digunakan adalah sensor jarak ultrasonik HC-SR04 sebagai pendeteksi jarak, mikrokontroler yang digunakan atmega 328, motor DC sebagai output dari pergerakan robot dengan mengendalikan putaran motor menggunakan
pengaturan lebar pulsa PWM (Pulse Width Modulation). Menggunakan LCD sebagai display untuk menampilkan jarak tempuh dan kondisi jarak, serta bunyi peringatan melalui buzzer sebagai indikator bahaya.
1.2 Rumusan Masalah
Dari uraian diatas, dirumuskan permasalahan yang terdapat dalam pembuatan tugas akhir ini yaitu :
1. Bagaimana mengaplikasikan Mikrokontroler sebagai sistem kendali dari alat yang dibuat dengan mengendalikan lebar pulsa PWM untuk motor DC, dan data jarak ditampilkan melalui display LCD dengan buzzer sebagai alarm peringatan.
2. Bagaimana Sensor jarak ultrasonik HC-SR04 digunakan sebagai sensor untuk mengukur jarak antara robot dengan obyek didepannya.
3. Bagaimana mengaplikasikan motor DC sebagai penggerak robot dan output untuk mengendalikan kecepatan putaran motor DC melalui pengaturan nilai PWM.
1.4 Tujuan
Tujuan pembuatan tugas akhir ini adalah untuk menghindari kerusakan pada robot jika menabrak hambatan didepannya dengan mengatur kecepatan pada robot dengan jarak aman yang telah ditentukan.
1.3 Batasan Masalah
Dalam melaksanakan tugas akhir ini, penulis membatasi permasalahan sebagai berikut:
1. Mikrokontroler menggunakan Atmega328 dengan input sensor Ultrasonik HC SR04, dan output motor DC, LCD, BUZER.
2. Range jarak untuk pembacaan sensor ultrasonik HC SR04 adalah dari 10 cm hingga 50 cm.
3. Robot mobile hanya dapat berbelok ke satu arah saja pada saat jarak pembacaan sensor ultrasonik HC SR04 adalah 10 cm.
1.5 Manfaat
Dapat menghasilkan suatu sistem pengatur kecepatan pada robot mobile untuk menghindari tabrakan dengan obyek didepannya.
1.6 Sistematika Penulisan.
Sistematika penulisan laporan tugas akhir ini adalah sebagai berikut : BAB I PENDAHULUAN
Berisikan tentang latar belakang, rumusan masalah, tujuan, batasan masalah, manfaat, dan sistematika penulisan dari pembuatan tugas akhir. BAB II LANDASAN TEORI
Dalam hal ini, penulis akan mengemukakan teori dasar mengenaiRobot,
sensor jarak Ultrasonik HC SR04, mikrokontroler Atmega 328, LCD,
Driver motor DC, motor DC, PWM.
Berisi tentang perancangan dan pembuatan peralatan (hardware) dan pemograman (software) yang menggunakan sistem kendali dengan menggunakan mikrokontroler Atmega 328 berbasis arduino IDE.
BAB IV PENGUJIAN DAN ANALISA
Berisikan tentang proses pengujian dan analisa dari alat yang dibuat, dan bagaimana cara melakukan pengujian terhadap alat.
1. Pengujian blok-blok rangkaian yang dipergunakan dan pengujian program yang telah dibuat.
2. Alat ukur yang digunakan pada pengujian sesuai dengan yang diperlukan.
3. Bagaimana cara melakukan pengukuran pada alat. 4. Hasil pengujian dan analisa dari keseluruhan alat. BAB V PENUTUP
Merupakan penutup yang berisikan kesimpulan dan saran mengenai alat yang telah dirancang.
2.1 Mobile Robot
Mobile Robot adalah konstruksi robot yang ciri khasnya adalah
mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain dengan bantuan navigasi dari sebuah sensor. Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat. Untuk dapat membuat sebuah mobile robot minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik, contoh mobile robot terdapat pada gambar 1.
Gambar 1. Robot Mobil
Base robot mobil dapat dengan mudah dibuat dengan menggunakan plywood/ triplek, akrilik sampai menggunakan logam (aluminium).
2.2 Arduino Uno R3
Arduino Uno R3 adalah board berbasis mikrokontroler pada ATmega328. Board ini memiliki 14 digital input/output pin (dimana 6 pin dapat digunakan
sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC-DC atau baterai untuk menggunakannya. Board Arduino Uno memiliki fitur-fitur baru sebagai berikut :
1. 1,0 pinOut: tambah SDA dan SCL pin yang dekat ke pin aref dan dua pin baru lainnya ditempatkan dekat ke pin RESET, dengan IO REF yang memungkinkan sebagai buffer untuk beradaptasi dengan tegangan yang disediakan dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan Prosesor yang menggunakan AVR, yang beroperasi dengan 5V. Yang kedua adalah pin tidak terhubung, yang disediakan untuk tujuan pengembangannya.
Gambar 2. Mikrokontroller Arduino Uno R3
Tabel 1. Karakteristik Arduino Uno R3
2.3 Sensor Ultrasonik HC-SR04
Sensor ini terdiri dari dua bagian, yaitu transmitter dan receiver dengan komponen yang sama, yaitu piezoelectric transducer. Komponen ultrasonik ini bekerja berdasarkan prinsip speaker konvensional. Gelombang Ultrasonik bekerja berdasarkan pantulan gelombang suara. Gelombang ultrasonik bisa merambat pada medium padat, cair dan gas.Sensor Ultrasonik berfungsi sebagai pemancar yang memancarkan gelombang ultrasonik dengan frekuensi 20 KHz, kemudian apabila terjadi benturan terhadap suatu benda atau objek maka gelombang ultrasonik akan dipantulkan kembali dan diterima oleh rangkaian sensor yang berfungsi sebagai penerima.
Maksimum jarak yang dapat dibaca sensor ultrasonik HC SR04 adalah 3 s.d 250 cm. Adapun rumus yang digunakan untuk perhitungan jarak sebagai berikut : S = V.t/2
Dimana S = Jarak
V = Kecepatan gelombang suara ( 344 m/s ) t = Waktu tempuh
Bentuk fisik, pin sensor ultrasonik dan cara kerjanya dapat dilihat pada Gambar 4 dan Gambar 5.
Gambar 4. Sensor Ultrasonik HC-SR04
Gambar 5. Sistem kerja sensor ultrasonik
2.4 LCD
LCD (Liquid Cristal Display) berfungsi untuk menampilkan karakter angka, huruf ataupun simbol dengan lebih baik dan dengan konsumsi arus yang rendah. Dalam aplikasinya, LCD 2x16 terbagi menjadi beberapa bagian bentuk, ada yang memakai backlight, ada juga yang tidak. Kemudian yang memakai
backlight, ada yang berwarna hijau dan ada juga yang berwarna biru. Tapi intinya
sama, pin yang digunakan sama, fisik LCD dapat dilihat pada gambar 10, dan konfigurasi pin nya pada table 2.
Gambar 6. LCD
Karena LCD sudah dilengkapi perangkat kontrol sendiri yang menyatu dengan LCD, maka kita mengikuti aturan standar yang telah disimpan dalam pengontrolan tersebut. konfigurasi pin yang terdapat dalam LCD adalah,
Tabel 2. Konfigurasi fungsi PIN LCD PIN SIMBOL NILAI FUNGSI
1 Vss / Ground Power supply 0 volt (ground)
2 Vcc / supply Power supply Vcc
3 Vee / kontras Setting kontras
4 RS 0/1 0: intruksi input / 1: data input
5 RW 0/1 0: tulis ke LCD / 1: membaca dari LCD
6 E 0/1 Mengaktifkan sinyal 7 DB0 0/1 Data pin 0 8 DB1 0/1 Data pin 1 9 DB2 0/1 Data pin 2 10 DB3 0/1 Data pin 3 11 DB4 0/1 Data pin 4 12 DB5 0/1 Data pin 5 13 DB6 0/1 Data pin 6 14 DB7 0/1 Data pin 7
15 VB+ Power 5 Volt (Vcc) Lampu latar (jika ada)
2.5 Driver motor DC
Driver motor digunakan untuk menggerakkan motor DC dengan
menggunakan mikrokontroler. Hal ini dilakukan karena arus yang mampu diterima atau yang dikeluarkan oleh mikrokontroler sangat kecil (dalam satuan miliampere) sehingga agar mikrokontroler dapat menggerakkan motor DC diperlukan suatu rangkaian driver motor yang mampu mengalirkan arus sampai dengan beberapa ampere. Rangkaian driver motor DC dapat berupa rangkaian transistor, relay, atau IC ( Integrated Circuit ).
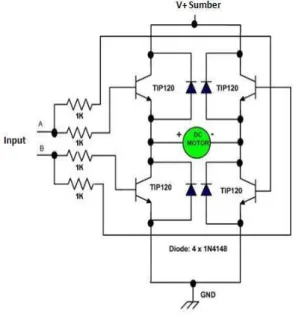
Rangkaian driver yang umum digunakan adalah L293D. Prinsip kerja driver ini adalah dasar dari cara kerja transistor. Pada driver ini, transistor disusun dengan menggunakan rangkaian bridge. Penerapan rangkaian
H-Bridge ini banyak digunakan pada pengaturan motor DC untuk menggerakkan
motor secara putar kanan dan putar kiri dengan menggunakan prinsip kerja transistor sebagai saklar. Pengertian dari transistor itu sendiri adalah komponen elektronika yang dapat berfungsi sebagai saklar. Transistor memiliki tiga kutub atau kaki yang diberi nama : Kolektor (C), Basis (B), dan Emitor (E). Transistor juga dapat digunakan sebagai penguat arus (current amplifier).
Prinsip kerja dari transistor sebagai saklar yaitu “ jika pada basis mengalir arus IB, maka pada kolektor mengalir arus IC dan pada emitor mengalir arus IE, sehingga transistor akan mengalami kondisi saturasi, (kaki Emitor dan colector terhubung) dengan rumusan :
IE = IB + IC
Dimana : IE = arus pada Emitor IB = arus pada Basis
IC = arus pada Kolektor
H-bridge adalah rangkaian yang konfigurasi atau susunan transistornya sepeti membentuk huruf H. Transistor ini digunakan sebagai switching sehingga nantinya motor dapat berputar searah jarum jam (clockwise) dan berlawanan arah jarum jam (counterclockwise).
Gambar 7. Rangkaian H-bridge transistor
Tegangan kerja IC L293D adalah dari 6 volt sampai dengan 36 volt dan arus impuls tak berulang maksimum sebesar 1,2 ampere. Konfigurasi pin IC L293D ditunjukkan pada gambar 8.
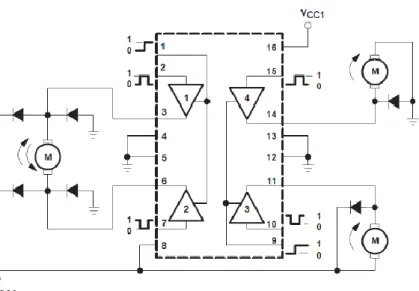
Gambar 9. Struktur dasar IC L293D
2.6 Motor DC
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor.
Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik mengalir.
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B, konstruksi pada motor DC dapat dilihat pada gambar 10.
Gambar 10. Kontruksi motor DC
Belitan stator merupakan elektromagnet, dengan penguat magnet terpisah F1-F2. Belitan jangkar ditopang oleh poros dengan ujung-ujungnya terhubung ke komutator dan sikat arang A1-A2. Arus listrik DC pada penguat magnet mengalir dari F1 menuju F2 menghasilkan medan magnet yang memotong belitan jangkar. Belitan jangkar diberikan listrik DC dari A2 menuju ke A1. Sesuai kaidah tangan kiri jangkar akan berputar berlawanan jarum jam, bentuk fisik motor DC itu sendiri dapat dilihat pada gambar 12.
Gambar 11. Motor DC
Garis - garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B.
2.7 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
Gambar 12. Simbol buzzer
2.8 PWM
PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low, dimana dapat mengontrol durasi sinyal high dan low sesuai dengan yang inginkan. Duty
cycle merupakan prosentase periode sinyal high dan periode sinyal, prosentase duty cycle akan bebanding lurus dengan tegangan rata-rata yang dihasilkan.
Pengaturan lebar pulsa modulasi atau PWM merupakan salah satu teknik yang “ampuh ” yang digunakan dalam sistem kendali (control system ) saat ini. Pengaturan lebar modulasi dipergunakan di berbagai bidang yang sangat luas, salah satu diantaranya adalah: speed control (kendali kecepatan), power
control (kendali sistem tenaga), measurement and communication .
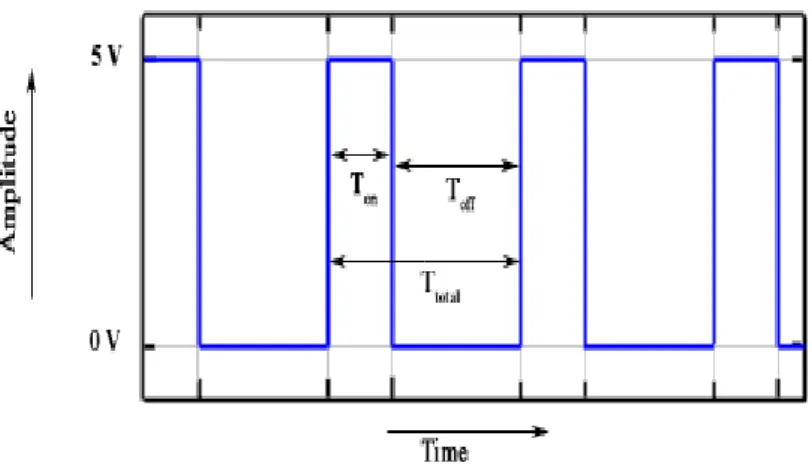
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata- rata dari gelombang tersebut.
Gambar 13. Prinsip dasar gelombang PWM
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi (baca: high
atau 1) dan,
Toff adalah waktu dimana tegangan keluaran berada pada posisi rendah (baca: low
atau 0).
Anggap Ttotal adalah waktu satu siklus atau penjumlahan antara Ton dengan Toff ,
biasa dikenal dengan istilah “periode satu gelombang”.
PWM bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan dc dikonver menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off menjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka temperatur (suhu) air yang dikendalikan akan semakin sesuai dengan yang diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar 13 sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak.
PERANCANGAN DAN PEMBUATAN ALAT
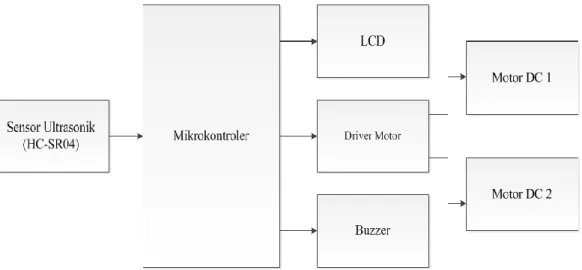
Perancangan secara umum dari sistem pengatur kecepatan pada robot mobile ini dapat dilihat pada blok diagram dibawah:
Gambar 14. Blok Diagram Sistem Secara Keseluruhan
Tugas akhir ini mengambil tema perancangan dan pembuatan sistem pengatur kecepatan pada robot mobile berbasis Mikrokontroler, prinsip kerjanya adalah dengan menggunakan mikrokontroler ATmega 328 sebagai kontroler sistem, dan sensor ultrasonik HC-SR04 sebagai pengukur dan pengidentifikasi jarak antara robot dengan obyek didepannya, lalu motor DC sebagai obyek penggerak.
Sistem terdiri dari perankat keras dan perangkat lunak. Perangkat keras terdiri dari sensor jarak ultrasonik, mikrokontroler Atmega328, LCD (Liquid
merupakan program yang dibuat untuk mengontrol kinerja dari mikrokontroler Atmega 328.
Cara kerja dari sistem tersebut adalah ketika robot diaktifkan, maka sensor ultrasonik akan memancarkan gelombang ultrasonik melalui intruksi dari mikrokontroler. Pada saat pengiriman ini maka timer internal mikrokontroler mulai aktif dan menghitung waktu lamanya pantulan gelombang diterima kembali oleh sensor ultrasonik, timer ini akan berhenti ketika sinyal pantulan diterima kembali oleh sensor ultrasonik.
Data lamanya pantulan ini kemudian akan diolah oleh mikrokontroler menjadi nilai jarak dalam satuan senti meter (CM), data jarak akan ditampilkan pada display LCD. Pada jarak diatas 50 cm, maka LCD akan menampilkan nilai jarak yang dibaca dan nilai PWM, dan diberikan nilai PWM 250 yang diberikan untuk motor DC1 dan motor DC2. Pada kondisi ini robot melaju cepat.
Ketika jarak yang adalah antara 10 cm – 50 cm, maka LCD akan menampilkan karakter yang sama seperti sebelumnya, yaitu jarak yang dideteksi dan nilai PWM, bedanya pada nilai PWM, dan buzzer akan, diberikan nilai PWM 150 untuk motor DC1 dan motor DC2, maka robot akan mengurangi kecepatannya dari kecepatan sebelumnya.
Pada saat jarak yang dibaca sudah mencapai jarak 10 cm, maka LCD akan menampilkan jarak dan nilai PWM, lalu alarm peringatan melalui buzzer akan diaktifkan oleh mikrokontroler, setelah itu robot mobile akan berhenti secara otomatis dan berbelok kekanan untuk menghindari hambatan didepannya. Dengan nilai PWM 0 untuk berhenti dan saat berbelok kekanan motor DC kiri berputar maju dengan PWM 130 dan motor DC kanan berputar mundur dengan PWM 130.
Dalam keadaan ini robot akan berbelok kearah kanan untuk menghindari hambatan yang ada didepannya.
3.1 Perancangan dan Pembuatan Hardware 3.1.1 Perancangan Hardware
Sistem pengatur kecepatan pada robot mobile ini menggunakan beberapa blok rangkaian dan hardware elektronik, yaitu:
- Rangkaian Mikrokontroller Arduino
- Rangkaian Sensor jarak ultrasonik HC-SR04 - Rangkaian LCD 2x16
- Rangkaian Buzzer
- Rangkaian Driver motor DC dan motor DC
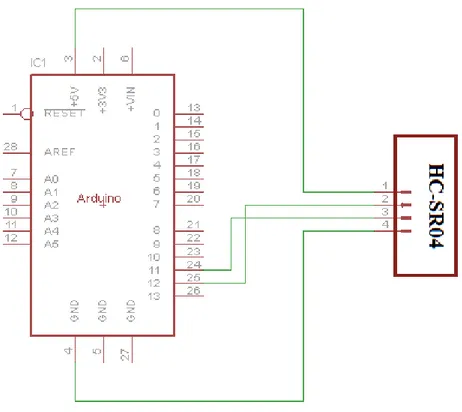
3.2 Rangkaian sensor ultrasonik HC-SR04
Sensor ultrasonik HC-SR04 digunakan sebagai pendeteksi jarak, dan dihubungkan ke PIN 11 dan PIN 12 digital dari mikrokontroler arduino. Jarak yang dideteksi oleh modul sensor HC-SR04 ini akan diproses oleh mikrokontroler dan akan ditampilkan melalui LCD. Sensor HC-SR04 diletakkan pada bagian terdepan dari robot agar dapat membaca jarak dengan optimal, koneksi sensor
Gambar 15. Rangkaian sensor ultrasonik HC-SR04
Dibawah ini pada tabel 3 akan dijelaskan koneksi pin dari sensor ultrasonik HC-SR04:
Tabel 3. Koneksi pin dari sensor ultrasonik HC-SR04 ke Mikrokontroler
No Dari Pin Sensor Ultrasonik (HC-SR04)
Ke Pin Arduino Uno
1 Vcc Vcc +5V
2 Trigger PIN 12
3 Echo PIN 11
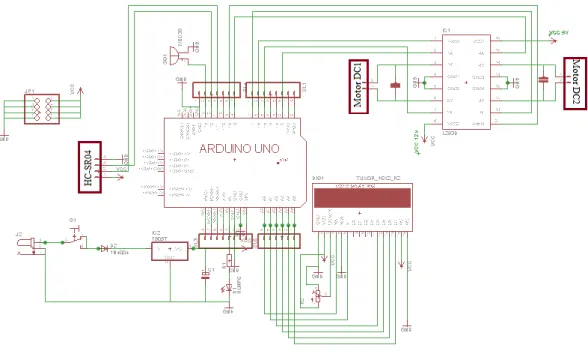
3.3 Rangkaian Mikrokntroler Arduino
Rangkaian ini digunakan sebagai kontroler utama dari sistem pengatur kecepatan pada mobile robot. Setiap port dari mikrokontroler dihubungkan dengan input dan output rangkaian, input yang digunakan adalah sensor ultrasonik HC-SR04 dan outputnya adalah LCD, Motor DC1 dan Motor DC2, dan buzzer. Sumber tegangan untuk robot menggunakan bateray 9,6 V. Berikut adalah rangkaian mikrokontroler arduino yang dapat dilihat pada gambar 15.
Gambar 15. Rangkaian Mikrokontroler keseluruhan
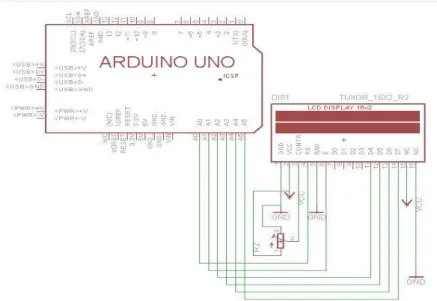
3.4 Rangkaian display LCD
LCD digunakan sebagai output untuk menampilkan jarak yang dibaca oleh sensor jarak HC-SR04. LCD yang digunakan adalah LCD dengan karakter 2x16, yaitu 2 baris dan 16 kolom. LCD dihubungkan ke port analog dari arduino, dapat dilihat pada gambar 16.
Gambar 16. Koneksi kaki LCD ke arduino
Pada tabel 4 dibawah ini akan dijelaskan konfigurasi hubungan kaki LCD ke Arduino:
Tabel 4. Konfigurasi hubungan kaki LCD dengan Arduino.
DARI PIN LCD KE PIN MIKROKONTROLER KETERANGAN GROUND GND GROUND VCC 5V VCC CONTRAST A0 VCC RS A1 PIN.D0 RD A0 PIN.D1 EN A1 PIN.D2 D4 A2 PIN.D4 D5 A3 PIN.D5 D6 A4 PIN.D6 D7 A5 PIN.D7 VCC 5V VCC GROUND GND GROUND
Pada LCD akan ditampilkan karakter dan angka untuk memberitahukan jarak yang dibaca oleh sensor ultrasonik dan nilai PWM. Selengkapnya dapat dilihat pada tabel 5,6, dan 7 dibawah ini:
Tabel 5. Tampilan LCD pada jarak 50 cm
J A R A K : 5 0 C M
P W M : 2 5 0
Tabel 6. Tampilan LCD pada jarak 20 cm
J A R A K : 2 0 C M
P W M : 1 5 0
Tabel 7. Tampilan LCD pada jarak 10 cm
J A R A K : 1 0 C M
P W M : 1 3 0
Tabel 5, 6, dan 7 menunjukkan posisi penempatan karakter dan angka pada LCD 2x16. Penempatan dari posisi karakter dan angka diatur melalui program pada Arduino.
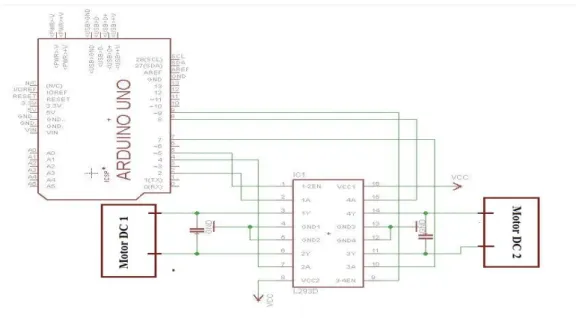
3.5 Driver Motor DC
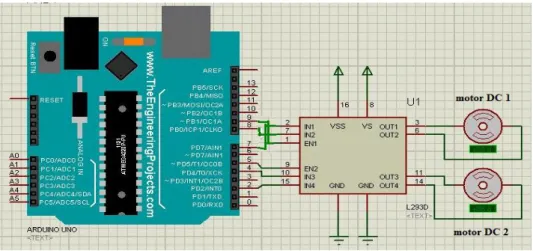
Driver motor DC berfungsi sebagai pengatur dan pengontrol arus dan tegangan untuk motor DC. Driver akan mengkondisikan kapan motor akan diaktifkan dan kapan motor DC akan dimatikan. Untuk perancangan ini, penulis menggunakan driver L293N sebagai driver motor DC. Dan diberikan dua supply tegangan DC. Yaitu tegangan 12V dan 5V, tegangan 12V adalah untuk motor DC. Sedangkan 5 V adalah untuk tegangan kerja dari arduino.
Gambar 17. Rangkaian driver L293D ke arduino
Dari gambar 17 pin 1 dan 9 merupakan sebuah pin yang difungsikan untuk meng-enable-kan motor DC (ON/OFF motor DC), oleh karena itu pin 1 dan 9 dapat dihubungkan dengan output dari mikrokontroler. Sedangkan pin 2,7,10 dan 15 digunakan sebagai input logika untuk mengatur putaran motor DC dan dapat juga digunakan untuk memberhentikan motor DC secara cepat (fast motor stop).
Tabel 8. Koneksi Pin mikrokontroler ke pin IC L293D
PIN mikrokontroler IC L293 D PIN 9 PIN 1 (PWM) PIN 8 PIN 7 PIN 7 PIN 2 PIN 5 PIN 9 (PWM) PIN 4 PIN 15 PIN 2 PIN 10
3.6 Perancangan Motor DC
Motor DC dihubungkan ke output dari driver L293D fungsi motor DC adalah sebagai penggerak robot. Kedua kaki motor DC yaitu positif dan negatif dihubungkan ke output driver L293D. Seperti pada gambar 17 pada rangkaian driver akan dijelaskan mengenai koneksi motor DC ke IC Driver L293D.
Karena sistem menggunakan motor DC, maka motor DC dihubungkan ke kedua output untuk motor DC pada Driver L293D, yaitu pin positif dan pin negatif.
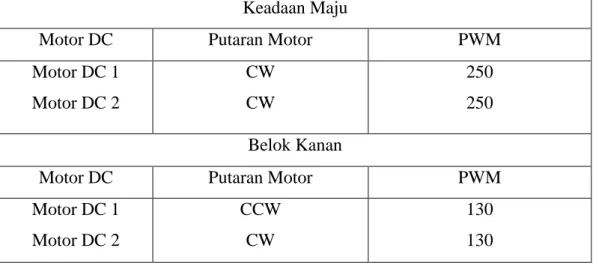
Tabel 9. Rancangan putaran motor DC1 dan motor DC2 Keadaan Maju
Motor DC Putaran Motor PWM
Motor DC 1 Motor DC 2 CW CW 250 250 Belok Kanan
Motor DC Putaran Motor PWM
Motor DC 1 Motor DC 2 CCW CW 130 130 3.7 Perancangan PWM
PWM digunakan sebagai pemberi sinyal tegangan DC untuk rangkaian driver motor DC. Nilai PWM untuk motor DC diberikan dengan duty cycle yang berbeda-beda. Karena IC mikrokontroler yang digunakan adalah ATMega 328 sebanyak 8 bit. Maka resolusi untuk mengaktifkan PWM pada mikrokontroler
adalah 28, yaitu256, berarti nilainya dari 0 – 255 atau dengan mewakili duty cycle dari 0% sampai 100%.
Gambar 18. Input PWM pada IC L293D
Semakin besar nilai PWM maka kecepatan putaran dari motor DC akan semakin cepat, sebaliknya semakin kecil nilai PWM, maka kecepatan putar motor DC akan semakin lambat. Gelombang sinyal PWM diaktifkan melalui pin 5 dan 9 dari mikrokontroler. Dan dihubungkan ke kaki EN1 dan EN2 pada IC L293D.
Tabel 10. Perancangan nilai PWM untuk driver motor DC
JARAK PWM KONDISI MOTOR DC
≥ 50 CM 250 CEPAT
10 CM - < 50 CM 150 LAMBAT
= 10 CM 130 BELOK KANAN
3.8 Rangkaian Buzzer
Rangkaian buzzer berfungsi untuk mengoperasikan buzzer sebagai suara peringatan ketika robot telah mencapai jarak minimal terhadap hambatan didepannya. Buzzer digunakan dengan aktif high pada mikrokontroler
(menghubungkan kaki posistif buzzer ke mikrokontroler), dapat dilihat pada gambar 19.
Gambar 19. Rangkaian koneksi buzzer ke mikrokontroler
Buzzer akan aktif ketika jarak yang dibaca dibawah 50 cm, jika jarak yang dibaca diatas 50 cm maka buzzer tidak aktif, pengaktifan buzzer dapat dilihat pada tabel 11.
Tabel 11. Rancangan pengaktifan buzzer
Jarak Buzzer
≥ 50 CM Off
10 CM - < 50 CM On
3.9 Pembuatan Hardware
Hasil rancangan yang telah dibuat kemudian direalisasikan dalam bentuk robot mobile yang siap untuk dilakukan pengujian dan dioperasikan. Proses pembuatan robot mobile meliputi tiga bagian proses, yaitu:
a. Pembuatan bagian elektronik b. Pembuatan bagian mekanik c. Pembuatan program atau software
Alat dan bahan yang digunakan dapat dilihat pada tabel 12: Tabel 12. Daftar alat dan bahan yang digunakan
No Nama alat dan spesifikasi Jumlah
1 Mesin bor PCB 1 2 Tang lancip 1 3 Tang potong 1 4 Tang kombinasi 1 5 Gergaji akrilik 1 6 Penitik 1 7 1 set obeng 1 9 Mistar baja 60 cm 1 10 Mata bor 0,8-1,2 mm 1 11 Kikir datar 1 12 Penggores 1 13 Solder 1 14 Penyedot 1 15 Pinset 1 16 Wadah pelarut 1
3.10 Pembuatan bagian elektronik
Melakukan simulasi uji coba rangkaian menggunakan hardware project
board, agar dapat diketahui apakah rangkaian yang telah dirancang dapat
berfungsi dengan baik.
Pembuatan gambar rancangan rangkaian untuk seluruh blok rangkaian,
yaitu shiled Arduino uno, sensor ultrasonik, driver motor DC, dan LCD.
Pembuatan rangkaian dan layout dilakukan dengan menggunakan software
Eagle.
Setelah lay out selesai, layout diprint dan kemudian fotocopy pada slide
plastic.
Selanjutnya digunakan setrika untuk memindahkan lay out ke PCB.
Setelah lay out menempel pada PCB, melarutkan papan PCB dengan
menggunakan Larutan fericolorit (FeCl3).
Setelah selesai dilarut, selanjutnya dilakukan pegeboran titik-titik
penyolderan dengan menggunakan mata bor 0,8 dan 1 mm.
Setelah itu komponen dipasangkan dengan benar, sesuai skema rangkaian.
Kemudian disolderlah komponen dengan benar. Bentuk fisik hasil
solderan yang baik adalah berbentuk kerucut (tidak bulat).
Kemudian sisa-sisa kaki komponen dipotong.
Proses pembuatan bagian elektronik dari robot mobile dapat dilihat dari gambar berikut:
Gambar 20. Proses pembuatan bagian elektronik
3.11 Pembuatan bagian mekanik
Pertama dipersiapkan telebih dahulu akrilik dengan tebal 2 mm.
Setelah itu dilakukan pemotongan akrilik sesuai dengan rancangan
mekanik yang telah ditentukan.
Kemudian dilakukan pengeboran pada titik-titik pengeboran untuk lobang
pemasangan baut.
Setelah semua lobang untuk baut dibuat, maka akrilik dihubungkan dan
dipasangkan agar dapat terbentuk bentuk dari robot mobile.
Selanjutnya dipasangkan ban mobil mainan sebagai roda untuk robot
mobile.
Semua rangkaian elektronik dihubungkan menggunakan kabel dan black
Proses pembuatan mekanik chassing robot mobile dapat dilihat pada gambar dibawah ini
3.12 Perancangan dan Pembuatan software
3.12.1 Perancangan Software (Flowchart program)
4.1 Pengujian Hardware dan Software
Pengujian dilakukan pada tiap-tiap blok rangkaian. Pada pengujian ini perlu dilakukan pengukuran pada sensor sebagai input Mikrokontroler, power supply, LCD, Driver motor DC, Buzzer dan sistem minimum. Sebelum melakukan pengukuran, maka dipersiapkan terlebih dahulu alat-alat yang diperlukan dalam melakukan pengukuran. Adapun peralatan-peralatan yang dibutuhkan tersebut diantaranya adalah Multimeter, Osiloskop, dan alat ukur jarak atau penggaris.
4.1.1 Pengujian dan analisa modul Sensor HC-SR04
Pengujian dilakukan untuk mengetahui bagaimana kinerja dari sensor ultrasonik pada saat digunakan sebagai pengukur jarak (dalam CM) pada mobile robot. Dengan melakukan pengujian, maka dapat diamati bagaimana akurasi pengukuran jarak dan respon dari modul sensor ultrasonik HC-SR04. Langkah pengujian sensor Ultrasonik HC-SR04 adalah sebagai berikut:
1. Menghubungkan supply tegangan ke PIN Vcc dan Ground sensor HC-SR04
2. Menghidupkan rangkaian mikrokontroler yang telah diprogram untuk menguji sensor ultrasonic HC-SR04 dan mematikan rangkaian yang lain, yaitu Driver motor DC.
4. melakukan pengujian dengan media yang berbeda untuk mengetahui kualitas sensor tersebut.
Gambar 24. Rangkaian pengujian rangkaian sensor SRF04
Pengukuran dilakukan menggunakan multimeter pada kaki dari modul sensor HC-SR04. Yaitu kaki Trigger pada PIN 12 mikrokontroler dan kaki Echo pada PIN 11 mikrokontroler. Ini dilakukan untuk mengamati bagaimana karakteristik arus dan tegangan dari sensor HC-SR04 pada saat digunakan atau aktif.
Gambar 25. Pengujian modul sensor HC-SR04 Sensor HC-SR04 TP 1
Pada pengujian pembacaan sensor HC-SR04, digunakan penggaris sebagai pengukur jarak sebenarnya secara manual. Dan alat dengan posisi sensor yang berada didepan diaktifkan untuk menguji pembacaan pada hambatan. Hasil pengujian menujukkan bahwa pembacaan jarak yang dibaca oleh sensor HC-SR04 memiliki akurasi yang cukup baik.
Tabel 13. Hasil Pengukuran Modul Sensor HC-SR04
Trigger (TP1) Echo (TP2) Jarak Sebenarnya (CM) Jarak yg dibaca sensor (CM) Error (%) Volt Perioda Volt Perioda
5 1 mS 5 1 ms 10 10 0 % 5 1 mS 5 1 mS 20 20 0% 5 2 mS 5 1 mS 40 40 0 % 5 4 mS 5 1 mS 60 61 1,63 % 5 5 mS 5 1 mS 80 81 1,23 % 5 5 mS 5 1 mS 100 102 1,96 % 5 6 mS 5 1 mS 120 121 0,83 % 5 8 mS 5 1 mS 140 142 1,42 % 5 10 mS 5 1 mS 160 161 0,61 % 5 12 mS 5 1 mS 180 182 1,09 % 5 15 mS 5 1 mS 200 203 1,47 % 5 16 mS 5 1 mS 220 221 0,45 % 5 18 mS 5 1 mS 250 253 1,18%
Pengukuran yang dilakukan dari jarak 10 CM sampai 40 CM menujukkan tidak terjadi kesalahan dan keselisihan, dan untuk jarak diatas 40 CM memiliki error dengan rata-rata error yaitu 0,91 %. Hal ini menujukkan bahwa semakin jauh jarak yang dibaca oleh sensor HC-SR04, maka akan mengurangi akurasi dari pembacaan sensor. Dan semakin dekat jarak yang dibaca maka akurasi pembacaaan sensor juga akan semakin baik.
Pada pengukuran tegangan yang dilakukan pada kaki Trigger dan kaki Echo sensor, dapat dibuat analisa bahwa:
1. Pembacaan sensor HC-SR04 mempengaruhi nilai perioda dan frekuensi tegangan yang dihasilkan sensor.
2. Semakin jauh jarak yang dibaca maka, perioda semakin besar, dan frekuensi makin kecil.
3. Semakin dekat jarak yang dibaca maka, perioda semakin kecil, dan frekuensi makin besar.
Analisa diatas sesuai dengan cara kerja dari sensor HC-SR04, yaitu jarak tempuh gelombang ultrasonik mempengaruhi perioda atau waktu dari pantulan sensor. Sehingga hal ini mempengaruhi hasil pembacaan sensor. Hal ini sesuai dengan rumus perhitungan jarak:
𝑆 = 𝑉 . 𝑡/2 Dimana S = adalah jarak
V = Kecepatan gelombang suara (ultrasonik) t = Waktu tempuh
Pengukuran gelombang tegangan pada kaki trigger dari sensor HC-SR04 dilakukan dengan menggunakan alat ukur osiloskop digital.
Prinsip kerja dari kaki trigger adalah, saat diaktifkan melalui sinyal dari mikrokontroler, maka kaki trigger akan memberikan tegangan output berlogika 1 untuk mengaktifkan gelombang ultrasonik pada sensor. Dan saat pantulan diterima kembali oleh sensor, maka kaki echo sensor akan menghasilkan logika 1. Selanjutnya kaki trigger juga akan kembali berlogika 1 untuk mengaktifkan gelombang ultrasonik. Perioda waktu aktif kaki trigger antara selang waktu pantulan ini dapat diolah menjadi nilai jarak pada perumusan cacahan jarak dari perioda waktu ke satuan cm pada mikrokontroler.
Untuk pengukuran kaki trigger dan echo dengan osiloskop digunakan: V/div : 5 V
t/div : 5 mS
Gambar 26. Gelombang tegangan kaki trigger pada jarak 150 cm Berikut ini merupakan perhitungan nilai jarak berdasarkan perioda nilai tegangan kaki trigger:
Jarak sebenarnya = 150 cm Jarak dibaca sensor = 151 cm
V = 344 m/s
Maka S = V . t/2 S = 344 m/S . 9 mS S = 344 m/S . 4,5 x 10 -3 S = 344 m/S . 0,0045 S S = 1,54 m S = 154 cm
Sedangkan perbandingan dengan hasil pengukuran pada jarak 100 cm.
Gambar 27. Gelombang tegangan kaki trigger pada jarak 50 cm S = V . t/2 S = 344 m/S . 5 mS S = 344 m/S . 2,5 x 10 -3 S = 344 m/S . 0,0025 S S = 0,86 m S = 86 cm
Selanjutnya perbandingkan dengan hasil pengukuran pada jarak 50 cm.
Gambar 28. Gelombang tegangan kaki trigger pada jarak 50 cm S = V . t/2 S = 344 m/S . 3 mS S = 344 m/S . 1,5 x 10 -3 S = 344 m/S . 0,0015 S S = 0,51 m S = 51 cm
Sedangkan pada pengukuran kaki Echo dengan jarak 50,100 dan 150 cm adalah sebagai berikut:
Berikut adalah pengukuran dengan jarak 150 cm
Berikut adalah pengukuran dengan jarak 100 cm
Gambar 30. Gelombang kaki Echo pada jarak 100 cm Berikut adalah pengukuran dengan jarak 50 cm
Gambar 31. Gelombang kaki Echo pada jarak 50 cm
Dapat dilihat pada pengukuran gelombang tegangan pada kaki echo untuk setiap jarak memiliki nilai perioda yang sama. Ini menujukkan bahwa nilai echo hanya akan aktif ketika menerima pantulan gelombang ultrasonik.
Sedangkan untuk analisa rumus perhitungan melaui rumus konversi cacahan ke cm adalah sebagai berikut:
V = 344 m/s V = 34440 cm/s
t = 1 sekon / 34440 t = 29 uS
Dikarenakan sensor HC-SR04 berkerja dengan pantulan, sehingga menghasilkan nilai waktu dua kali dari seharusnya, maka waktu tempuh dikali 2.
t = 29 uS . 2 t = 58 uS
Maka, untuk setiap waktu perioda 58 uS jarak yang dibaca sensor adalah 1 cm. Rumus ini, dimasukkan kedalam program yang dibuat. Dengan instruksi: S = t / 58
Dari hasil analisa perhitungan diatas maka dapat dibuat kesimpulan bahwa, jarak pembacaan sensor yang dihasilkan tidak tepat dan tidak sesuai dengan jarak yang sebenarnya. Hal ini dikarenakan, perhitungan untuk konversi cacahan ke satuan cm kurang tepat, sehingga nilai yang diihasilkan tidak tepat.
Berikut perbandingannya:
Tabel 14. Hasil perbandingan jarak dengan perhitungan rumus
Jarak Sebenarnya Jarak dibaca Sensor Perhitungan rumus
150 cm 151 cm 154 cm
100 cm 102 cm 86 cm
50 cm 50 cm 51 cm
Sensor HC-SR04 memiliki karakteristik pembacaan yang berbeda-beda untuk setiap jenis permukaan yang akan dibaca jaraknya. Karena kondisi permukaan yang berbeda akan menghasilkan pembacaan atau pengukuran yang
berbeda pula. Tabel dibawah ini akan menjelaskan perbedaan hasil pembacaan sensor terhadap jenis atau kondisi permukaan yang berbeda-beda.
Tabel 15. Hasil Pengukuran Modul Sensor HC-SR04 pada objek berbeda
No Objek yang digunakan Keterangan Pembacaan sensor Jarak maksimal Jarak minimum 1 Dinding 4m x 4m Dipantulkan 256 cm 4.8 cm 2 Papan 50cm x 100cm Dipantulkan 250 cm 5 cm 3 Kardus 8cm x 15cm Dipantulkan 252 cm 5 cm 4 Busa 5cm x 10cm Tidak dipantulkan - -
Dari tabel 15, dapat dilihat bahwa setiap permukaan atau obyek yang digunakan sebagai media pembacaan sensor, memiliki nilai hasil pembacaan yang berbeda-beda pula. Pada permukaan keras, maka sensor dapat mendeteksi. Pada permukaan yang lunak, berbusa, atau tidak keras, maka sensor tidak dapat mendeteksi, penyebabnya adalah karena pancaran gelombang ultrasonik dari sensor HC-SR04 tidak sepenuhnya dipantulkan kembali oleh obyek, karena sebagian dari gelombang diserap oleh permukaan obyek.
4.1.2 Pengujian dan analisa rangkaian Display LCD
Pengujian dilakukan dengan mengamati bagaimana karakter yang ditampilkan oleh LCD pada saat digunakan. Dan bagaimana cara kerja dari LCD dengan jumlah karakter 16 x 2.
Gambar 32. Rangkaian pengujian LCD
Tabel 16. Hasil pengukuran dan pengujian rangkaian display LCD Tegangan
Input
Jarak Sebenarnya (CM) Tampilan LCD Display
5 V 10 JARAK : 10 CM PWM : 130 40 JARAK : 40 CM PWM : 150 60 JARAK : 60 CM PWM : 250
Hasil pengujian menunjukkan bahwa LCD menampilkan karakter dengan sangat baik, dan tidak ada terjadi kesalahan penampilan karakter atau penempatan posisi yang salah.
Gambar 33. Hasil pengujian rangkaian display LCD
4.1.3 Pengujian dan analisa rangkaian Driver Motor DC IC L293D
Pengujian untuk rangkaian driver motor DC IC L293D dilakukan dengan menggunakan multimeter dan osiloskop. Hal ini bertujuan untuk mengetahui bagaimana nilai PWM dan cara kerja dari driver motor DC pada saat aktif.
Titik pengukuran berada pada PIN5 dan PIN9 pada mikrokontroler (en1 dan 2) untuk PWM, PIN1 dan PIN9 dari IC L293D. Kaki ini merupakan input untuk driver ICL293D yang menerima sinyal tegangan dari output PIN2, PIN4, PIN 5 dan PIN7, PIN8, PIN9 dari mikrokontroler.
Gambar 34. Rangkaian pengujian driver motor DC IC L293D
TP1 TP 2 TP3
Pada saat dilakukan pengujian, driver motor DC bekerja aktif dengan sangat baik, yaitu dapat mengatur arah putaran motor, dan juga menerima sinyal PWM untuk kecepatan putar motor DC. Pengukuran dilakukan dengan multimeter (untuk logika putaran), dan osiloskop (untuk gelombang PWM).
Tabel 17. Hasil pengukuran logika putaran IC L293D saat motor aktif Motor DC1 Setting PWM Output Mikrokontroler ke IC L293D Input IC L293D dari mikrokontroler TP1 TP2 PIN 2 PIN 7 0 4,6 v 0 4,6 v 0 130 4,6 v 0 4,6 v 0 150 4,6 v 0 4,6 v 0 250 4,6 v 0 4,6 v 0 Motor DC2 Setting PWM Output Mikrokontroler ke IC L293D Input IC L293D dari mikrokontroler TP3 TP4 PIN 10 PIN 15 0 4,6 v 0 4,6 v 0 130 4,6 v 0 4,6 v 0 150 4,6 v 0 4,6 v 0 250 4,6 v 0 4,6 v 0
Hasil pengukuran tabel 4.7 menunjukkan bahwa pada saat aktif, PIN 7 dan PIN 8 untuk motor DC1 mengeluarkan nilai logika untuk diinputkan ke PIN 2 dan PIN 7 dari IC driver L293D, dan untuk motor DC2 PIN 2 dan PIN 4 mengeluarkan nilai logika untuk diinputkan ke PIN 10 dan PIN 15 dari IC driver
L293D, Logika 1 adalah 5 V, dan logika 0 adalah 0V. Karena logika putaran motor untuk IC L293 D adalah sebagai berikut:
Tabel 18. Logika putaran motor untuk IC driver L293D
PIN 2 PIN 7 KONDISI MOTOR
0 0 Motor stop
0 1 Putar searah jarum jam ( CW )
1 0 Putar berlawanan jarum jam ( CCW )
1 1 Motor stop
4.1.4 Pengujian dan analisa nilai gelombang tegangan PWM
Untuk nilai gelombang PWM untuk 2 buah motor DC berada pada PIN 9 dan PIN 5 dari mikrokontroler, dan diinputkan ke PIN 1 dan PIN 9 dari IC driver L293D. Pengukuran bentuk gelombang PWM dilakukan dengan menggunakan osiloskop, dan hasil pengukuran membuktikan, pada kaki PIN 9 dan 5 mikrokontroler dan PIN 1 dan 9 IC L293D menghasilkan bentuk gelombang tegangan yang berbeda-beda untuk setiap nilai PWM yang berbeda. PIN 1 dan 9 dihubungkan ke probe + dari osiloskop, dan probe - Osiloskop dihubungkan ke kaki ground.
Setting osiloskop untuk pengukuran PWM 250 adalah:
Volt / Div = 5 V
Gambar 35. Gelombang tegangan PWM 250
Dari data gelombang tegangan PWM diatas, maka dapat dihitung nilai dari duty cycle yang dihasilkan, duty cycle merupakan persentase nilai aktif Ton dibanding T total. Semakin besar duty cycle maka akan semakin cepat putaran motor DC, perhitungan nilai duty cycle yaitu sebagai berikut:
D = Ton x 100 % = Ton x 100 %
Ton + Toff Ttotal
D = 20 mS x 100 % = 20 mS x 100 %
20 mS + 1 mS 21 mS
D = 95,23 %
Jadi Duty cycle yang dihasilkan oleh PWM sebesar 250 adalah 95,23 % Pada kondisi ini, mobile robot melaju dengan cepat.
Setting osiloskop untuk pengukuran PWM 150 dan 130 adalah:
Volt / Div = 5 V
Time / Div = 1 mS
Ton
Gambar 36. Gelombang tegangan PWM 150
D = Ton x 100 % = Ton x 100 %
Ton + Toff Ttotal
D = 1,2 mS x 100 % = 1,2 mS x 100 %
1,2 mS + 0,8 mS 2 mS
D = 60 %
Jadi Duty cycle yang dihasilkan oleh PWM sebesar 150 adalah 60% . Pada kondisi ini, mobile robot mulai mengurangi kecepatannya.
Gambar 37. Gelombang tegangan PWM 130
Ton
Toff
Ton
D = Ton x 100 % = Ton x 100 %
Ton + Toff Ttotal
D = 1 mS x 100 % = 1 mS x 100 %
1 mS + 1,2 mS 2,2 mS
D = 45 %
Pada kondisi ini, mobile robot berbelok dengan kecepatan PWM 130 ,ducty cycle 45% .
Dari hasil penghitungan nilai duty cycle diatas maka dapat dinalisa, bahwa semakin besar nilai PWM yang diberikan, maka duty cycle pun juga akan semakin besar. Artinya nilai PWM dan nilai duty cycle berbanding secara lurus.
Dan nilai dari rata-rata tegangan yang dihasilkan adalah:
Vout = Ton x Vin
Ton + Toff Nilai rata-rata untuk gelombang PWM 150:
Gambar 38. Gelombang tegangan PWM 150
V/div = 5 V t/div = 1 mS
Vout = Ton x Vin Ton + Toff
Vout = 1,2 x 5 V
1,2 + 0,8 Vout = 3 V
Jadi tegangan output rata-rata yang dihasilkan dengan PWM sebesar 150 adalah 3 VDC.
4.1.5 Pengujian dan analisa rangkaian Buzzer
Pengujian rangkaian buzzer dilakukan dengan menggunakan multimeter, ini bertujuan untuk mengetahui bagaimana kondisi tegangan pada saat buzzer digunakan sebagai alarm peringatan kondisi jarak mobile robot terhadap halangan didepannya. Buzzer diberi kondisi delay pada program yang dibuat. Dan hasil pengukuran membuktikan bahwa buzzer memiliki tegangan pada saat aktif.
Gambar 39. Rangkaian pengujian buzzer TP
Tabel 19. Hasil pengujian rangkaiian buzzer
JARAK KONDISI
BUZZER TEGANGAN
DELAY AKTIF
≥ 50 CM OFF 0 V Tidak ada
< 50 CM ON 2,5 V Lambat
≤ 10 CM ON 4,1 V Cepat
4.2 Pengujian dan Analisa alat
Proses pengujian alat adalah dengan menjalankan mobile robot pada bidang datar atau lantai, dan menambahkan benda atau objek lain sebagai pengganti halangan. Dibawah ini akan dijelaskan mengenai keterangan dari proses pengujian sistem pengereman otomatis mobile robot yang telah dirancang dan dibuat:
Lokasi pengujian : Basecamp kelas CEC
Bidang landasan : Lantai
Jarak maksimum : 250 CM
Jarak minimum : 10 CM
Objek yang dibaca : Dinding tembok
Tabel 20. Hasil data pengujian alat Jarak Sebenarnya (CM) Jarak di LCD (CM) Error pembacaan (%) Buzzer Putaran Motor DC (RPM) 250 252 1,24 % Off 1365 200 203 1,47% Off 1265 180 182 1,09% Off 1158 160 161 0,61% Off 1108 140 142 1,42% Off 1040 120 121 0,83% Off 1038 100 102 1,96% Off 970 80 81 1,23% Off 940 60 61 1,63% Off 938 40 40 0 % On 654 20 20 0 % On 0 10 10 0% On 0
Setelah melakukan pengujian keseluruhan, maka dapat diambil analisa bahwa:
1. Jarak pembacaan maksimal seharusnya yang terdeteksi oleh sensor adalah hingga 300 CM, tetapi pada sistem yang dibuat jarak maksimal yang dapat dideteksi adalah sejauh 250 CM. Analisa dari hal ini adalah, karena sensor HC-SR04 memiliki nilai toleransi kesalahan dan tidak selalu sama dengan nilai yang ditunjukkan oleh datasheet sensor.
2. Semakin jauh jarak obyek, maka nilai pembacaan sensor HC-SR04 untuk mendeteksi jarak obyek menghasilkan nilai error yang semakin besar pula, penyebabnya adalah pemberian perhitungan nilai untuk konversi hasil cacahan dari nilai counting sensor ke nilai CM yang kurang tepat.
3. Semakin dekat pembacaan sensor HC-SR04, maka perioda aktif dari kaki trigger dan echo sensor semakin cepat, sehingga menghasilkan frekuensi yang cepat pula. Ini membuktikan pantulan gelombang ultrasonik juga semakin cepat.
4. Pada jarak dari 50 CM hingga 250 CM dari obyek, kecepatan putar motor DC masih cepat sehingga robot masih melaju dengan cepat dan buzzer belum aktif.
5. Pada jarak dari 11 CM hingga 50 CM dari obyek, maka robot akan mengurangi kecepatannya, dan kecepatan putar motor DC mulai melambat, sehingga robot akan melambat dan buzzer aktif.
6. Pada jarak 10 CM, maka robot akan berbelok dengan proses dimana motor DC1 berputar CW dan Motor DC2 berputar CCW sehingga robot akan berbelok ke satu arah.
7. Ketika pada laju dengan kecepatan penuh, dan dengan mendadak diletakkan hambatan didepan robot, robot tidak dapat berbelok dengan maksimal. Hal ini dapat dianalisa, penyebabnya adalah respon pembacaan dari sensor HC-SR04 yang masih belum maksimal.
5. 1 Kesimpulan
Setelah dilakukan proses perancangan, pembuatan, dan pengujian dari sistem pengatur kecepatan pada mobile robot berdasarkan jarak dengan hambatan, maka dapat dibuat kesimpulan sebagai berikut:
1. Saat digunakan sebagai sensor untuk melakukan sistem pengatur kecepatan, sensor HC-SR04 tidak dapat mendeteksi dengan baik sehingga pada saat kecepatan maksimal, robot tidak dapat melakukan pengaturan kecepatan dengan stabil.
2. Pada saat jarak sebenarnya 150 cm berbeda dengan jarak dibaca sensor dengan jarak 151 cm dan dengan perhitungan rumus didapat 154 cm, pada saat jarak sebenarnya 100 cm berbeda dengan jarak dibaca sensor dengan jarak 102 cm dan dengan perhitungan rumus didapat 84 cm, pada saat jarak sebenarnya 50 cm berbeda dengan jarak dibaca sensor dengan jarak 50 cm dan dengan perhitungan rumus didapat 51 cm.
3. Jika nilai PWM 250 didapat nilai ducty cycle 95,23%, maka keepatan robot maksimal, jika nilai PWM 150 didapat ducty cycle 60% maka kecepatan robot berkurang.
4. Buzzer aktif ketika jarak sudah mencapai kurang dari 50 cm, karena pada program dirancang pengaktifan buzzer.
5.2 Saran
Dari perancangan, pembuatan, dan pembahasan mengenai alat yang dibuat. Maka dapat diberikan beberapa saran menyangkut alat yang telah dibuat, yaitu:
1. Respon pembacaan dari sensor HC-SR04 agak lambat, oleh karena itu pada pengembangan selanjutnya, sebaiknya digunakan sensor ultrasonik jenis lain yang memiliki respon pembacaan yang cepat. Misalnya sensor ultrasonik PING dari paralax.
2. Dikarenakan alat ini merupakan sistem pengatur kecepatan menggunakan motor DC, sebaiknya untuk pengembangan di masa yang akan datang ditambahkan dengan pengatur pergerakan robot, dengan gerakan ke samping kanan dan samping kiri. Sehingga robot tidak hanya berbelok ke satu arah saja.
DAFTAR PUSTAKA
1. Malik, Ibnu. 2003. “Pengantar Membuat Robot”, Yogyakarta Penerbit: Gava Media.
2. Prawoto, Ihsan.2016. Pengertian Arduino UNO Mikrokontroler
ATmega328.http://www.caratekno.com/2015/07/pengertian-arduino-uno-mikrokontroler.html, diakses tanggal 20 Agustus 2016
3. Pengertian Sensor Ultrasonik HC-SR04, dikutip dari
(http://komponenelektronika.biz/sensor-ultrasonik.html) , diakses tanggal 23 Agustus 2016
4. Maulana,Eka. 2012. PENGATURAN PWM(Pulse Width Modulation) dengan PLC. UNIVERSITAS BRAWIJAYA MALANG.
5. Penjelasan tentang Driver Motor L293D, dikutip dari ( http://elektronika-dasar.web.id/driver-motor-dc-l293d/ ) Diakses tanggal 23 Agustus 2016 6. http://elektronika-dasar.web.id
Lampiran 1 Blok diagram sistem
Lampiran 2 Rangkaian sensor ultrasonic HC-SR04
Lampiran 3 Rangkaian mikrokontroler keseluruhan
Lampiran 4 Rangkaian koneksi display LCD ke arduino
Lampiran 5 Rangkaian driver motor IC L293D
Lampiran 6 Input PWM pada IC L293D
Lampiran 7 Rangkaian buzzer
Lampiran 8 Program