Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, Hlm. 17 - 32, P-ISSN 1412-0372, E-ISSN 2541-089X, doi: http://dx.doi.org/10.25105/jetri.v19i1.9544RANCANG BANGUN SISTEM LAJU GERAK MOTOR
BERDASARKAN GESTURE
T.Ariq Muzafar Syah dan Muhammad Yaser. Teknik Elektro Universitas Pancasila Jakarta.
Jalan Srengseng Sawah, Jagakarsa, Jakarta 12640, Indonesia Email : [email protected], [email protected]
ABSTRACT
The limitations of a disabilities person who only rely on hands encourage humans to create robotic gesture technology. One example is the limitations of disabilities people in doing housework such as cleaning the house. From these problems, a tool that can be developed for them is designed, namely a gesture robot with an additional cleaner component. The robot gesture method makes easy for them which a robot mechanism starting from hand gesture control that produces data on the degree of inclination and then the data is sent to the microcontroller and the output is transmitted by a bluetooth transmitter to a bluetooth receiver to be processed by the microcontroller. After being read and processed by the microcontroller, the data is connected to the motor driver to determine the movement of the robot motor with the experimental results of moving forward, backward, left and right each one meter away at a speed of 1.2 m/s. While the maximum distance of the robot control range by blueetooh is 10 meters with an ideal distance of 3-5 meters and the ultrasonic warning system between the robot and the object is a maximum of 100 cm with an indication of the LED and buzzer will light up. If more than 100 cm ultrasonic sensor does not detect the nearest object, the LED and buzzer will not light up.
Keywords — gesture, motor speed, bluetooth.
ABSTRAK
Keterbatasan para difabel yang hanya mengandalkan tangan dalam beraktifitas mendorong manusia untuk menciptakan teknologi robot gesture. Salah satu contohnya adalah keterbatasan orang difabel dalam melakukan pekerjaan rumah seperti pembersihan ruangan. Dari permasalahan tersebut dirancang suatu alat yang dikembangkan untuk para difabel yaitu robot gesture dengan komponen tambahan cleaner. Metode robot gesture memudahkan para difabel dimana mekanisme robot berawal dari kendali gesture tangan yang menghasilkan data derajat kemiringan lalu dikirimkan data tersebut kepada mikrokontoller dan outputnya ditransmisikan oleh bluetooth tansmitter ke bluetooth receiver untuk diolah oleh mikrokontroller. Usai dibaca dan diolah oleh mikrokontroller,data dihubungkan dengan motor driver untuk menentukan pergerakan motor robot dengan hasil percobaan pergerakan maju,mundur,kiri dan kanan masing-masing sejauh satu meter ditempuh dengan kecepatan 1,2 m/s. Sedangkan jarak maksimal jangkauan kendali robot oleh blueetooh sejauh 10 meter dengan jarak ideal 3-5 meter dan sistem peringatan ultrasonik antara robot dengan objek
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089Xmaksimal 100 cm dengan indikasi LED dan buzzer akan menyala. Apabila lebih dari 100 cm sensor ultrasonik tidak mendeteksi objek terdekat, LED dan buzzer tidak akan menyala. Keywords — Gesture, laju gerak motor, bluetooth
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
1. PENDAHULUAN
Seiring dengan perkembangan zaman mendorong pengembangan teknologi yang semakin pesat. Memasuki abad 21 teknologi robot dan telekomunikasi untuk meningkatkan kualitas kehidupan manusia terus dikembangkan. Teknologi robot merupakan salah satu penemuan manusia yang paling maju pada abad 21. Robot merupakan alat bantu yang digunakan untuk memudahkan kerja manusia dan bahkan menggantikan peran manusia dalam melakukan sesuatu yang beresiko. Berbagai robot telah dikembangkan untuk membantu kerja manusia diantaranya robot yang membantu kaum difabel dalam beraktifitas sehari-hari.
Seseorang yang memiliki keterbatasan dalam beraktifitas atau difabel dan hanya dapat mengandalkan tangan mendorong manusia untuk menciptakan alat bantu dengan teknologi robot. Salah satu keterbatasan manusia difabel adalah dalam melakukan pekerjaan rumah misalnya pembersihan ruangan rumah dikarenakan akan mengalami kesulitan ketika melakukan kegiatan pembersihan ruangan rumah. Untuk itu pada tulisan ini dikembangkan suatu alat untuk membantu para difabel yaitu robot gesture dengan komponen tambahan cleaner.
Metode dari robot gesture ini memudahkan para difabel untuk mengendalikan robot hanya dengan menggerakan dan memiringkan posisi tangan. Metode ini berdasarkan 3 aspek penting yaitu kendali ,komunikasi dan gerakan motor
2. KAJIAN PUSTAKA
Beberapa perancangan yang serupa tetapi untuk lingkup industri salah satu nya adalah dibahas dalam perancangan prototype robot pemindah barang dengan kendali sarung tangan [1]. Perancangan ini membuat sebuah prototype robot pemindah barang dengan kendali sarung tangan. Berdasarkan literatur yang ada kami melakukan pengembangan dengan menambahkan fungsi cleaner yang dikendalikan dengan gesture tangan untuk pembersihan ruangan bagi para difabel
Disamping itu pada perancangan lainnya [2] telah dibuat sistem implementasi pelacakan dan pengambilan benda bergerak menggunakan robot dengan pemindahan
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089Xberupa griper. Kendali robot pemindah barang ini menggunakan sensor flex. Sensor flex digunakan untuk mendeteksi pergerakan tangan pada manusia.
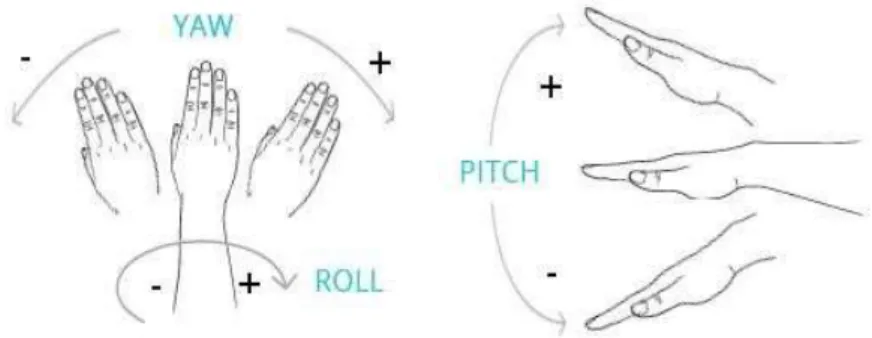
Fokus dari perancangan kami adalah pergerakan robot yang dikendalikan oleh gesture. Gesture adalah pergerakan dinamis yang diproses oleh otak lalu disalurkan ke bagian tubuh [3]. Robot dapat dikontrol oleh pengguna menggunakan gerakan tangannya. Akselerometer 3 sumbu diadopsi untuk merekam pergerakan tangan dalam bergeraknya semi autonomus robot. Kunci utama semi robot autonomus adalah navigasi, yaitu pengetahuan yang akurat tentang posisi. Posisi yang dimaksudkan adalah konfigurasi (x, y, z) robot sehubungan dengan kerangka koordinat global atau lokal, bukan topologi posisi [4].
Gambar 1 Gesture Yaw, Pitch, dan Roll
Gesture itu sendiri dianggap sebagai salah satu media interaksi yang lebih alamiah karena gesture biasanya digunakan untuk menyampaikan informasi. Melalui pengenalan gesture manusia hanya perlu melakukan sedikit gerakan untuk mengoperasikan perangkat di sekitarnya.
3. METODE PENELITIAN
Dalam rancangan robot yang sebelumnya lebih banyak digunakan dalam industri maupun hiburan, pada perancangan kami dikembangkan menjadi alat yang dapat membantu kinerja manusia secara individual yang bermanfaat dengan cara
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
merubah gerakan anggota tubuh menjadi kendali suatu robot. Robot gesture didesain tidak terlalu besar dan jarak jangkau robot yang efektif dengan media kontol gerakan robot yang dikontrol dengan gesture oleh seseorang difabel.
3.1 Perancangan Mekanik
Dalam perancangan mekanik diperlukan rangka dan penggerak yang akan dipasang dengan motor driver, motor dc, dan sensor. Rangka terbuat dari acrylic sheet smart car robot 4wd untuk mempermudah beberapa pemasangan tanpa perlu membuat lubang dengan mesin bor. Pada perancangan ini dimodifikasi menjadi 2wd robot car dengan tambahan roda universal untuk mempermudah mobilitas robot cleaner. Layer pertama robot merupakan tempat komponen penggerak, pengendali, bluetooth dan catu daya, sementara layer kedua merupakan tempat untuk external fan dc dan layer ketiga untuk sensor, catu daya, buzzer dan LED. Daftar komponen untuk membuat mekanik pada robot sebagaimana disajikan dalam tabel 1 berikut ini.
Tabel 1 Komponen mekanik
Nama Komponen Jumlah Fungsi
4WD Smart robot car
chassis 1
Rangka dari Robot Vacuum cleaner Spacer dan Hex nut 20 (Spacer) & 8 (Hex
nut)
Baut dan mur penyangga Rangka Robot
Motor Dc 6V 2 Aktuator Robot
Vacuum Cleaner Rubber wheel Rubber wheel (2) &Universal wheel (1) Roda penggerak utama yang terhubung dengan motor dc dan Roda dinamis dari Robot Vacuum Cleaner External Fan DC 1
Sebagai komponen penyedot debu pada robot vacuum cleaner
3.2 Perancangan Elektronik
Perancangan kendali robot menggunakan mikrokontroler Atmega 328p yang dipasang dengan Arduino Uno yang terhubung dengan Motor Driver L298N, modul Bluetooth HC-05 sebagai receiver, servo 9g sebagai penggerak vacuum dan Sensor
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089XUltrasonik sebagai komponen peringatan yang tersambung dengan buzzer. Jenis mikrokontroller yang digunakan adalah Arduino Nano dan Arduino uno. Arduino Nano adalah komponen kecil dan kompak dengan breadboard berbasis ATMega328 [5] dan Arduino Uno adalah board arduino standar dan yang sering digunakan. Pemilihan modul bluetooth HC-05 dalam perancangan ini disamping karena harga relatif murah dan juga mempunyai dua fungsi dan dapat diatur sebagai master atau slave [6]. sensor ultrasonik HC-SR04 digunakan untuk peringatan supaya tidak terjadi tabrakan. Sensor ini memiliki prinsip pemantulan gelombang suara untuk penentuan jarak obyek yang terdiri atas dua tranduser piezoelektrik [7]. Robot ini menggunakan Power Supply 12VDC sebagai sumber tegangan dan arus pada komponen elektronik. Motor driver akan diaktifkan menggunakan Switch On/ Off. Berikut daftar komponen elektronik yang digunakan untuk perancangan robot
Tabel 2 Komponen elektronik (Robot)
Alat Jumlah Fungsi
Arduino Uno Atmega
328p 1
Sebagai Main
komputer untuk memprogram sensor dan kendali (Robot) Bluetooth HC-05 1
Sebagai Media Komunikasi Data (RX)
Motor Driver L298N 1
Sebagai Kendali arah dan PWM dari Motor DC
Switch On/Off 3
Sebagai saklar hidup/mati sumber tegangan listrik Power Supply Battery
AA 3.7V DC 8
Sebagai sumber tegangan listrik robot Sensor Ultrasonik
HC-SR04 4
Sebagai sensor jarak untuk mencegah tabrakan robot terhadap obyek LED 1 Sebagai komponen indikasi peringatan bila robot mendekati batas jarak dengan obyek disekitar
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
Alat Jumlah Fungsi
Buzzer 1
Sebagai komponen
alarm untuk
peringatan kepada pengendali robot bila robot mendekati batas jarak dengan obyek disekitar
Tabel 3 Komponen elektronik (Glove)
Alat Jumlah Fungsi
Arduino Nano 1 Sebagai Main
komputer untuk memprogram sensor dan kendali (Robot)
Bluetooth HC-05 1 Sebagai Media
Komunikasi Data (TX)
Modul MPU6050 1 Sebagai Komponen
kendali robot berdasarkan gesture Power Supply Battery
9V DC
1 Sebagai sumber
tegangan listrik pada kendali gesture
Breadboard 2 Sebagai media
jumpering kabel dan jalur komponen elektronika
3.3. Perancangan Perangkat Lunak
Dalam perancangan perangkat lunak digunakan beberapa program perangkat lunak seperti Arduino IDE dan Fritzing. Fritzing digunakan untuk membuat desain simulasi perancangan komponen elektronika. Sementara itu, Arduino IDE digunakan untuk mengirim pemrograman motor driver, sensor dan modul bluetooth ke mikrokontroler.
Untuk program menjalankan robot menggunakan dua program codingan yang berupa program transmitter dan receiver. Program transmitter memilik fungsi untuk menyambungkan koneksi dari kendali dengan bantuan media bluetooth. Sedangkan
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089Xreceiver adalah penerima data yang dikirimkan oleh transmitter kendali untuk memproses data yang diperintahkan dan menerjemahkan menjadi gerakan robot.
Gambar 2 Proses Pemrograman Transmitter Robot Gesture
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
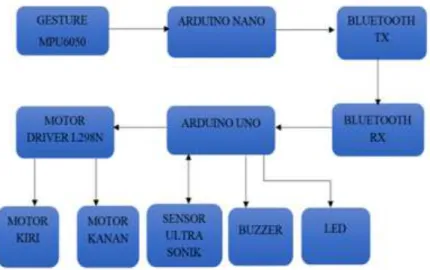
3.4 . Blok Diagram Rancangan Alat
Ada tiga tahap proses dalam perancangan alat, yaitu perancangan elektrik, mekanik dan program. Adapun sistem pergerakan robot ini dibuat dan dirancang sesuai dengan blok diagram sebagaimana di perlihatkan di gambar 4
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089X3.5 Flowchart kerja robot gesture
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
Robot gesture akan memproses sinyal perintah gerakan untuk mulai bekerja. Jika robot tidak berfungsi periksa ulang pada bagian transmitter & receiver HC-05 bluetooth karena permasalahan ini biasanya terjadi pada penyambungan sinyal kontroller wireless dengan penerima sinyal di robot gesture.
4. HASIL PENGUJIAN
Pada dasarnya perancangan perangkat elektronika baik manual ataupun otomatis membutuhkan tahap-tahap khusus guna menghasilkan perangkat yang optimal. Tahapan tersebut diantaranya tahap perencanaan, perancangan dan pengujian. Pada bagian ini akan dibahas mengenai pengujian. Dari pengujian ini akan diperoleh data proses kerja robot gesture untuk memastikan perancangan berfungsi dengan baik. Adapun pengujian yang dilakukan adalah sebagaimana berikut.
4.1 Pengujian pergerakan maju robot gesture
Pengujian berdasarkan gesture merupakan pengujian yang menjadi tema alat ini untuk mengetahui pengaruh gesture terhadap laju gerak robot. Adapun hasil dari beberapa pengujian untuk pergerakan maju seperti berikut:
Tabel 4 Pengujian transisi dari diam menjadi maju
Roll (X) Roll (Y) Kondisi
51 150 Stop
51 151 Stop
51 154 Stop
51 163 Maju
51 164 Maju
Dari hasil pengujian yang didapatkan,pergerakan maju pada robot gesture berada pada kondisi derajat X = 45° - 55° , Y ≥160°. Di luar range tersebut akan terjadi perubahan gerakan gesture. Adapun nilai toleransi range sekitar 5° sebagai titik transisi perpindahan arah pada robot
Jetri: Jurnal Ilmiah Teknik Elektro
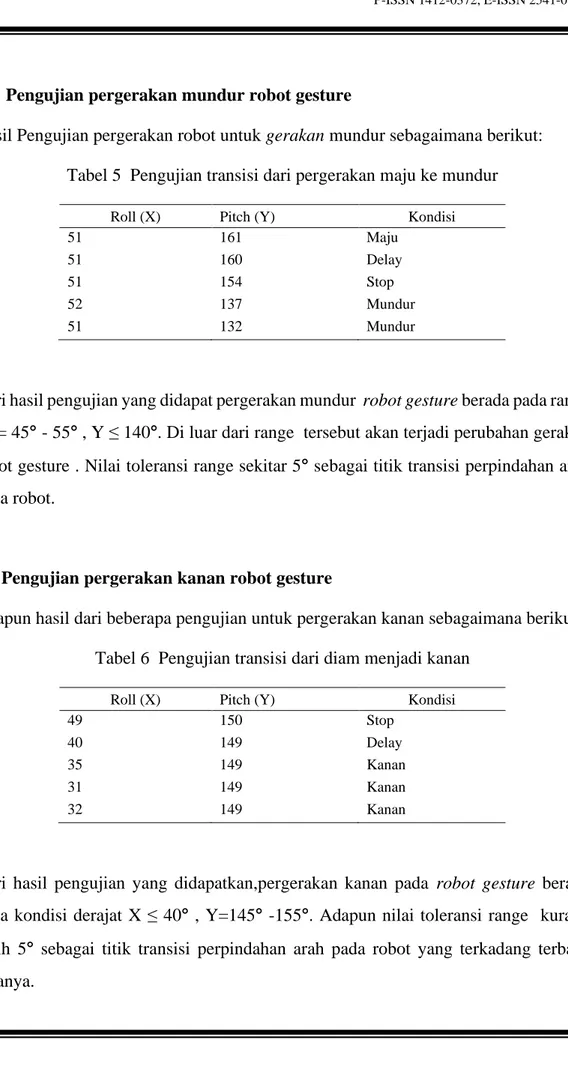
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089X4.2 Pengujian pergerakan mundur robot gesture
Hasil Pengujian pergerakan robot untuk gerakan mundur sebagaimana berikut:
Tabel 5 Pengujian transisi dari pergerakan maju ke mundur
Roll (X) Pitch (Y) Kondisi
51 161 Maju
51 160 Delay
51 154 Stop
52 137 Mundur
51 132 Mundur
Dari hasil pengujian yang didapat pergerakan mundur robot gesture berada pada range X = 45° - 55° , Y ≤ 140°. Di luar dari range tersebut akan terjadi perubahan gerakan robot gesture . Nilai toleransi range sekitar 5° sebagai titik transisi perpindahan arah pada robot.
4.3 Pengujian pergerakan kanan robot gesture
Adapun hasil dari beberapa pengujian untuk pergerakan kanan sebagaimana berikut:
Tabel 6 Pengujian transisi dari diam menjadi kanan
Roll (X) Pitch (Y) Kondisi
49 150 Stop
40 149 Delay
35 149 Kanan
31 149 Kanan
32 149 Kanan
Dari hasil pengujian yang didapatkan,pergerakan kanan pada robot gesture berada pada kondisi derajat X ≤ 40° , Y=145° -155°. Adapun nilai toleransi range kurang lebih 5° sebagai titik transisi perpindahan arah pada robot yang terkadang terbaca datanya.
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
4.4 Pengujian pergerakan kiri robot gesture
Adapun hasil dari beberapa pengujian gerakan kiri sebagaimana berikut:
Tabel 7 Pengujian transisi dari diam menjadi kiri
Roll (X) Pitch (Y) Kondisi
55 150 Stop
60 151 Delay
63 152 Kiri
66 153 Kiri
Dari hasil pengujian yang didapatkan,pergerakan kiri pada robot gesture berada pada kondisi derajat X ≥ 60°, Y= 145°-155°.
4.5 Pengujian Perangkat Bluetooth HC-05
Pengujian bluetooth HC-05 adalah dengan menghubungkan pin Tx dan pin Rx pada bluetooth ke pin digital pada arduino kemudian memberi masukan tegangan 3.3 volt yang sudah tersedia di salah satu pin arduino serta ground. Adapun hasil pengujian ini terlihat pada tabel 8 berikut ini.
Tabel 8 Pengujian Jarak Jangkau Kendali Bluettoh HC-05
Jarak Kendali Robot
(meter) Kondisi 1 Terkoneksi Baik 3 Terkoneksi Baik 5 Terkoneksi Cukup Baik (Delay) 7 Terkoneksi Cukup Baik (Delay) 10 Terkoneksi Cukup
Baik (Delay) tapi rentan Reconnecting
11 Reconnecting
12 Putus Koneksi ,lampu
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089X4.6 Pengujian Sensor Ultrasonik
Pengujian deteksi sensor ultrasonik cukup penting guna mengantisipasi terjadinya tabrakan antar robot dengan media pembatas pada saat beroperasinya robot seperti tembok, pintu, meja dan lainnya. Adapun hasil dari percobaan pendeteksi sensor ultrasonik sebagai mana terlihat pada table 9 berikut ini.
Tabel 9 Pengujian deteksi sensor ultrasonik
Jarak (cm) LED Buzzer
5 Menyala Terang Bersuara Keras
10 Menyala Terang Bersuara Keras
50 Menyala Terang Bersuara Keras
100 Redup Bersuara pelan
>150 Tidak Menyala Tidak Menyala
Dari pengujian didapatkan hasil peringatan dini oleh sensor ultrasonik berhasil dilakukan dengan jarak robot dengan obyek di depannya maksimal sekitar 100 cm
4.8 Pengujian kecepatan rata-rata robot
Salah satu parameter yang mempengaruhi kecepatan rata – rata robot adalah diameter roda robot. Pada table 10 terlihat hasil pengujian kecepatan rata – rata robot berdasarkan diameter rodanya
Tabel 10. Pengujian kecepatan rata-rata robot
Posisi Roda Diameter Roda (m) Gerakan Maju (m/s) Gerakan Mundur (m/s) Gerakan Kiri (m/s) Gerakan Kanan (m/s) Roda Depan 0,062 1,2 1.4 1,4 1,4 Roda Kiri 0,066 Roda Kanan 0,066
Dari pengujian diperoleh hasil kecepatan rata-rata pergerakan robot sebesar 1,3 m/s. Hasil tersebut sudah termasuk beban yang terpasang pada perangkat.
T. Ariq Muzafar Syah dkk. “Rancang Bangun Sistem Laju Gerak …”
5. KESIMPULAN
Dari Rancang Bangun Robot Gesture yang sudah dilakukan dapat disimpulkan sebagai berikut.
1. Pergerakan motor yang dikendalikan motor driver telah berhasil beroperasi dengan pergerakan maju, mundur, kanan, dan kiri dengan kecepatan rata – rata 1,3m/s
2. Pengiriman sinyal transmisi menggunakan bluetooth HC-05 dinyatakan berhasil dengan Jarak maksimal 10 Meter dan jarak ideal koneksi pada range 3 - 5 Meter.
3. Pergerakan Gesture rolling(X) dan pitching(Y) terhadap motor dc berhasil dilakukan dimana untuk gerakan maju pada derajat kemiringan (X = 45° - 55° , Y ≥ 160°), gerakan mundur (X=45°-55°, Y ≤ 140°), gerakan kanan (X ≥ 60°, Y=145°-155°) dan gerakan kiri (X ≤ 40° , Y=145°-155°).
4. Peringatan dini oleh sensor ultrasonik berhasil dilakukan dengan jarak maksimal robot dengan obyek di depannya sejauh 100 cm dengan menggunakan indikator buzzer dan LED.
REFERENSI
[1] W. Ratih “Prototype Robot Pemindah Barang Dengan Kendali Sarung Tangan” Skripsi. Universitas Muhammadiyah Surakarta. 2018.
[2] Kim, J, Park, J, Lee, J. “Implementation of Tracking and Capturing a Moving Object usinga Mobile Robot”. International Journal of Control, Automation, and System. Vol.3. No. 3. 2005
[3] Kun and W. T. Miller, “Adaptive dynamic balance of abiped robotusing neural networks”, IEEE Conference on Robotics and Automation, pp. 240- 245, 1996
Jetri: Jurnal Ilmiah Teknik Elektro
, Vol. 19, No. 1, Agustus 2021, P-ISSN 1412-0372, E-ISSN 2541-089X[4] L.J. Cox. “Blanche: Position Estimation for an Autonomous Robot Vehicle”, Proceedings. IEEE/RSJ International Workshop on Intelligent Robots and Systems ‘The Autonomous Mobile Robots and Its Applications. August 2002
[5] A. Kurniawan. Arduino Nano A Hands-On Guide for Beginner. 2019.
[6] R. Kallol Bosu : Learn Arduino Prototyping in 10 days. Packt Publishing 2017. [7] D. David (2019). Electronics and Microprocessing for Research, 2nd Edition
[Online]. Tersedia di https://www.cambridgescholars.com/product/978-1-5275-3929-7 . [2nd Desember 2019]