i
RANCANG BANGUN KONTROL CRANE MENGGUNAKAN ANDROID BERBASIS MIKROKONTROLER ARDUINO UNO
Disusun sebagai salah satu syarat untuk menyelesaikan Program Pendidikan dan Pelatihan Pelaut Diploma III
TITAN INDRARTA NIT. 05.17.018.1.43/E
ELECTRO TECHNICAL OFFICER
PROGRAM DIPLOMA III PELAYARAN POLITEKNIK PELAYARAN SURABAYA
TAHUN 2020
ii
PERNYATAAN KEASLIAN
Yang bertanda tangan di bawah ini : Nama : Titan Indrarta Nomor Induk Taruna : 05.17.018.1.43/E
Program Diklat : Electro Technical Officer Menyatakan bahwa KIT yang saya tulis dengan judul :
RANCANG BANGUN KONTROL CRANE MENGGUNAKAN ANDROID BERBASIS MIKROKONTROLER ARDUINO UNO
Merupakan karya asli seluruh ide yang ada dalam KIT tersebut, kecuali tema dan yang saya nyatakan sebagai kutipan, merupakan ide saya sendiri.
Jika pernyataan di atas terbukti tidak benar, maka saya sendiri menerima sanksi yang di tetapkan oleh Politeknik Pelayaran Surabaya.
Surabaya, ... 2020
Titan Indrarta NIT. 05.17.018.1.43/E
iii
PERSETUJUAN SEMINAR KARYA ILMIAH TERAPAN
Judul : RANCANG BANGUN KONTROL CRANE
MENGGUNAKAN ANDROID BERBASIS MIKROKONTROLER ARDUINO UNO Nama Taruna : Titan Indrarta
NIT : 05.17.018.1.43/E
Program Diklat : Electro Technical Officer
Dengan ini dinyatakan telah memenuhi syarat untuk diseminarkan SURABAYA, ... 2020
Menyetujui :
Pembimbing I Pembimbing II
Edi Kurniawan ,S.ST.,MT. Capt. Dian Wahdiana, M.M.
Penata Muda Tk.I (III/b) Pembina Tk. I (IV/b) NIP.19831202 201902 1 001 NIP.19700711 199803 1 001
Mengetahui:
Ketua Jurusan Elektro
Anak Agung Istri Sri Wahyuni, S.Si.T., M.Sda.
Penata Tk.I (III/d) NIP. 19781217 200502 2 001
iv Penguji II
(………..) NIP.
RANCANG BANGUN KONTROL CRANE MENGGUNAKAN ANDROID BERBASIS MIKROKONTROLER ARDUINO UNO
Disusun dan Diajukan Oleh : TITAN INDRARTA NIT.05.17.018.1.43/E Electro Technical Officer
Telah dipertahankan di depan Panitia Ujian Karya Ilmiah Terapan Politeknik Pelayaran Surabaya
Pada tanggal ... 2020 Menyetujui :
Mengetahui :
Penguji III
(………..) NIP.
Penguji I
(………) NIP.
Ketua Jurusan Elektro
Anak Agung Istri Sri Wahyuni, S.Si.T., M.Sda.
Penata Tk.I (III/d) NIP.19781217 200502 2 001
v
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa yang telah melimpahkan karunia dan rahmat-Nya, sehingga penulis dapat menyelesaikan penulisan proposal ini dengan judul Rancang Bangun Kontrol Crane Menggunakan Android Berbasis Mikrokontroler Arduino Uno. Proposal ini disusun dalam rangka memenuhi salah satu syarat melaksanakan proyek laut Program Diploma III Politeknik Pelayaran Surabaya.
Penelitian ini dilaksanakan karena ketertarikan peneliti pada masalah yang menyangkut pada kontrol crane di atas kapal. Hal-hal yang memerlukan pembuktian akan dituangkan dalam bentuk karya ilmiah berupa Karya Ilmiah Terapan. Pada kesempatan ini disampaikan terima kasih kepada pihak-pihak yang telah membantu sehingga penelitian ini dapat dilaksanakan, antara lain kepada :
1. Allah SWT, karena atas berkah dan izin-Mu penulis dapat menyelesaikan Karya Ilmiah Terapan.
2. Ibunda saya tercinta Suhartin Marsoeki, Abang Reza Pahlevi, Mas Veki dan keluarga yang selalu memberikan motivasi dan dukungan doa.
3. Adinda Debtiana Dwika Hilda yang juga berperan dalam membantu penelitian ini.
4. Capt. Dian Wahdiana, M.M. selaku Direktur Politeknik Pelayaran Surabaya.
5. Bapak Edi Kurniawan,S.ST.,MT. dan Capt. Dian Wahdiana, M.M. selaku dosen pembimbing yang selalu memberikan arahan dan waktunya.
6. Teman-teman ETO angkatan 05 yang selalu mendukung dan membantu penulis dalam keadaan susah maupun senang.
vi
7. Pasuhtar jaga dan Semua senior yang tidak bisa disebutkan namanya satu per satu yang telah mendidik dan mengasuh penulis dari catar hingga menjadi taruna madya.
8. Mas Kantin Polaris beserta istrinya yang selalu membantu penulis dalam hal apapun.
9. Serta semua pihak yang telah mendukung dan tidak dapat penulis sebutkan namanya satu per satu.
Peneliti menyadari jika di dalam penyusunan dan juga penulisan Karya Ilmiah Terapan ini masih banyak kesalahan dan kekeliruan akibat minimnya ilmu.
Oleh karena itu peneliti siap menerima kritik maupun saran yang membangun agar kedepannya berproses menjadi lebih baik lagi dan juga menjadi bahan evaluasi kedepannya.
Surabaya, ... 2019
Titan Indrarta NIT. 05.17.018.1.43/E
vii
ABSTRAK
TITAN INDRARTA, Rancang Bangun Kontrol Crane Menggunakan Android Basis Mikrokontroler Arduino Uno Karya Ilmiah Terapan, Politeknik Pelayaran Surabaya. Dibimbing oleh Bapak Edi Kurniawan, S.ST., MT. dan Capt.
Dian Wahdiana, M.M.
Analisa ini bertujuan untuk mencari solusi ketika remote kontrol mengalami troubleshooting secara mendadak, cara mengatasinya, dan mencegah kecelakaan ketika bekerja.
Perancangan sistem kontrol motor dc dan motor servo ini menggunakan aplikasi Bluetooth Electronics pada smartphone. Aplikasi ini bertujuan sebagai alat kendali untuk menggerakkan motor dc dan motor servo sesuai perintah.
Adapun hasil dari analisa ini, prototype tower crane dapat mengangkat beban seberat 30 gram dengan jarak pengendalian maksimal sejauh 4 meter.
Kata kunci : Android, Arduino Uno, Motor Dc, Motor Servo.
vii
ABSTRAC
TITAN INDRARTA, Crane control design using Android based Arduino Uno microcontroller applied scientific works, Surabaya Shipping Polytechnic. Supervised by Mr. Edi Kurniawan, S.ST., MT. and Capt. Dian Wahdiana, M.M.
This analysis aims to find a solution when the remote controller experiences sudden troubleshooting, how to solve it, and prevent accidents while working.
The design of a dc motor control system and servo motor uses the Bluetooth Electronics application on a smartphone. This application aims as a control tool to drive dc motors according to orders. As for the results of this analysis, the tower crane prototype can lift loads weighing 30 grams with a maximum control distance of 4 meters.
Keywords: Android, Arduino Uno, DC Motor, Servo Motor.
ix
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERNYATAAN KEASLIAN ... ii
HALAMAN PERSETUJUAN SEMINAR ... iii
HALAMAN PENGESAHAN ... iv
KATA PENGANTAR ... v
ABSTRAK ... vii
ABSTRAC ... viii
DAFTAR ISI ... ix
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xii
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan Penelitian ... 3
1.5 Manfaat Penelitian ... 3
BAB II TINJAUAN PUSTAKA 2.1 Review Penelitian Sebelumnya ... 4
2.2 Landasan Teori ... 5
2.2.1 Crane ... 6
2.2.2 Jenis-jenis Utama Crane ... 6
2.2.2.1 Crane Crawler ... 6
2.2.2.2 Mobile Crane ... 7
2.2.2.3 Tower Crane ... 8
2.2.2.4 Hydrolik Crane ... 8
2.2.2.5 Hoist Crane ... 9
2.2.2.6 Jip Crane ... 10
2.2.3 Arduino Uno ... 10
ix
2.2.4 Module Bluetooth ... 11
2.2.5 Motor Servo ... 14
2.2.6 Bluetooth Interface ... 15
2.2.7 Motor DC ... 17
2.2.8 Driver Motor L298N ... 17
2.2.9 Kerangka Penelitian ... 19
BAB III METODE PENELITIAN 3.1 Studi Literatur ... 20
3.2 Rancangan Sistem ... 20
3.3 Rancangan Hardware ... 22
3.3.1 Rancangan Rangkaian Bluetooth HC-05 ... 22
3.3.2 Rancangan Rangkaian Motor Servo ... 23
3.3.3 Rancangan Rangkaian Driver Motor L298N ... 24
3.4 Rancangan Bluetooth Interface ... 25
3.5 Rancangan Prototype Tower Crane ... 26
3.6 Rancangan Pengujian ... 27
BAB IV HASIL DAN PEMBAHASAN 4.1 Tahapan Pengujian ... 28
4.2 Instruksi Penggunaan Prototype Crane ... 32
4.3 Pengujian Prototype Crane ... 33
BAB V PENUTUP A. Kesimpulan ... 38
B. Saran ... 38
DAFTAR PUSTAKA...39
x
DAFTAR GAMBAR
Halaman
Gambar 2.1 Crawler Crane...7
Gambar 2.2 Mobile Crane...7
Gambar 2.3 Tower Crane...8
Gambar 2.4 Hydrolik Crane...9
Gambar 2.5 Hoist Crane...9
Gambar 2.6 Jip Crane...10
Gambar 2.7 Arduino Uno ATmega328...11
Gambar 2.8 Module Bluetooth HC-05...12
Gambar 2.9 Konfigurasi pin modul Bluetooth HC-05...13
Gambar 3.0 Motor Servo...14
Gambar 3.1 Lengan Robot Model Motor Servo...15
Gambar 3.2Bluetooth on Android...16
Gambar 3.3 Motor DC...17
Gambar 3.4 Driver Motor L298N...18
Gambar 3.5 Block Diagram Sistem...21
Gambar 3.6 Bluetooth to serial Module HC-05...23
Gambar 3.7 Rancangan Bluetooth HC-05 pada Arduino...23
Gambar 3.8 Rancangan Motor Servo pada Arduino...24
Gambar 3.9 Modul Driver Motor L298N………...25
Gambar 4.0 Rancangan Bluetooth Interface………...26
Gambar 4.1 Rancangan Prototype Tower Crane……...26
Gambar 4.2 Tampilan interface pada control crane……...30
xi
DAFTAR TABEL
Halaman
Tabel 2.1 Review Penelitian Sebelumnya...4
Tabel 2.2 Spesifikasi Arduino Uno ATmega328...11
Tabel 2.3 Konfigurasi pin Module Bluetooth HC-05...13
Tabel 4.1 Pengujian Bluetooth HC-05………...13
Tabel 4.2 Pengujian Motor Servo………...13
Tabel 4.3 Pengujian Motor DC………...13
Tabel 4.4 Pengujian rancang sistem kontrol pergerakan servo/swing crane...13
Tabel 4.5 Pengujian rancang sistem kontrol pergerakan motor DC atau wire...13
Tabel 4.6 Pengujian crane dengan beban………...13
1
BAB I PENDAHULUAN
1.1 Latar Belakang
Di zaman teknologi yang semakin canggih ini, banyak kapal telah dibuat guna mendukung sarana transportasi dunia baik kapal penumpang maupun kapal barang. Kapal barang adalah jenis kapal yang membawa barang-barang dan muatan dari satu pelabuhan ke pelabuhan lainnya.
Ribuan kapal jenis ini menyusuri lautan dan Samudra dunia setiap tahunnya, memuat barang-barang perdangangan nasional sampai internasional. Kapal barang pada umumnya didesain khusus untuk tugasnya, serta dibuat dalam beberapa ukuran.
Kapal barang dilengkapi dengan beberapa alat yang berfungsi untuk membantu dalam pekerjaannya selama proses bongkar muat. Beberapa alat yang berfungsi untuk proses bongkar muat kapal seperti crane kapal (ship gear). Crane kapal berfungsi untuk membantu dalam melakukan kegiatan stevedoring baik untuk barang berjenis container, maupun bag cargo (dengan menggunakan jala-jala) [1].
Pada pengoperasian crane masih menggunakan kendali manual yaitu dengan cara menggunakan remote kontrol (pendant). Pendant yang dioperasikan oleh operator agar crane dapat berpindah tempat atau bergeser kearah yang diinginkan untuk melakukan tindakan tertentu seperti menggeser tiang pancang, tiang listrik, ataupun mengangkat barang dari pelabuhan ke kapal. Penggunaan pendant ini memiliki keterbatasan
2
jarak dan harga yang relative mahal. Sehingga pada penelitian ini peneliti mengembangkan mengenai kontrol crane menggunakan smartphone berbasis Android [2].
Hal ini memberikan dampak positif dan mempermudah segala aktivitas baik itu menyangkut kebutuhan perseorangan maupun kepentingan sebuah instansi ataupun perusahaan. Teknologi tepat guna ini merupakan penerapan teknologi sehingga tercipta konsep sistem yang lebih efektif dan efisien baik segi waktu maupun biaya.
Berdasarkan uraian di atas maka penulis melakukan penelitian dengan mengambil judul : “RANCANG BANGUN KONTROL CRANE MENGGUNAKAN ANDROID BERBASIS MIKROKONTROLER ARDUINO UNO ”
1.2 Rumusan Masalah
Dalam pembuatan miniatur ini ada beberapa hal yang menjadi rumusan masalah, adapun masalah yang penulis angkat adalah :
1. Bagaimana prototype alat pengangkut barang (crane) dapat bekerja?
2. Bagaimana cara mengendalikan crane menggunakan android?
1.3 Batasan Masalah
Berdasarkan uraian rumusan masalah tersebut, maka pembahasan prototipe ini dibatasi pada hal-hal sebagai berikut :
1. Pergerakan slewing crane menggunakan Motor Servo dan hoist crane menggunakan Motor DC.
2. Koneksi crane dengan android menggunakan bluetooth HC-05. 3. Simulasi kayu yang diangkat dengan setiap berat nya 10 gram.
3
1.4 Tujuan Penelitian
1. Untuk mengurangi resiko kecelakaan kerja di area crane karena pengontrolan crane nya secara wireless.
2. Untuk mengefisiensikan operator dalam melakukan pekerjaannya.
1.5 Manfaat Penelitian 1. Secara Teoritis
a) Menambah wawasan ilmu pengetahuan yang saya pelajari di kampus mengenai rancang bangun kontrol crane menggunakan android basis mikrokontroler arduino uno.
b) Untuk menerapkan hasil pembelajaran di kampus Politeknik Pelayaran Surabaya tentang rancang bangun crane, serta menambah pengetahuan bagi penulis tentang pengendalian crane menggunakan bluetooth android.
2. Secara Praktis
a) Sebagai acuan untuk para dosen pengajar di kampus Politeknik Pelayaran Surabaya untuk meningkatkan kesadarannya sehingga para dosen pengajar mengerti dan memahami tentang Rancang Bangun Kontrol Crane Menggunakan Android Berbasis Mikrokontroler Arduino uno.
b) Sebagai acuan untuk para teknisi meningkatkan kesadarannya sehingga para teknisi mengerti dan memahami tentang Rancang Bangun Kontrol Crane Menggunakan Android Berbasis Mikrokontroler Arduino uno.
4
BAB II
TINJAUAN PUSTAKA
2.1 Review Penelitian Sebelumnya
Tabel 2.1 Review Penelitian Sebelumnya.
No Nama Judul Hasil
1. Radean Gusta Wijaya
(2016)
Pengatur Gerakan Crane Secara
Nirkabel
Remote harus ditentukan konfigurasi pin yang sesuai dengan receiver agar inputan sinyal dari remote dapat diterima dengan baik oleh Wifi kemudian sinyal yang ditangkap oleh Wifi dapat diolah ke Arduino sehingga Arduino dapat mengolah data lagi untuk memberikan inputan logic 0 atau 1 ke driver motor sehingga nantinya motor akan bergerak ke kiri atau ke kanan.
2. Imam
Tabroni (2017)
PROTOTYPE FORKLIFT OMNIDIRECTIO
NAL WHEEL DAN LENGAN
ROBOT
Dari hasil penelitian, kerja dari
prototype forklift omnidirectional wheel dan lengan robot berbasis
mikrokontroler ATmega1284 dan joystick yaitu rata-rata error pergerakan forklift dengan masukan sudut program
5
BERBASIS MIKROKONTRO
LER ATMEGA1284 DAN JOYSTICK
adalah 0.27%, dan pergerakan forklift dengan masukan sudut joystick adalah 1.67%. berat barang yang dapat diangkat oleh lengan robot tidak lebih dari 180g. jarak komunikasi antara pemancar joystick dengan penerima joystick yaitu sampai dengan 20 meter dalam keadaan penerima terbuka dan 3 meter dalam keadaan penerima
tertutup. Berdasarkan hasil pengujian sudah dapat berfungsi dengan baik dan dapat digunakan sebagaimana fungsi dan kegunaannya.
2.2 Landasan Teori
Landasan teori digunakan sebagai sumber teori yang dijadikan dasar dari pada penelitian. Seperangkat devinisi, konsep, serta proposisi yang telah disusun dengan rapi serta sistematis tentang variabel-variabel dalam sebuah penelitian. Sumber tersebut memberikan kerangka atau dasar untuk memahami latar belakang dari timbulnya permasalahan secara sistematis.
Landasan teori juga penting untuk mengkaji dari penelitian-penelitian yang sudah ada mengenai permasalahan pada mesin crane diatas kapal dan teori yang menerangkan tentang android berbasis mikrokontroler arduino uno diatas kapal. Berikut ini adalah beberapa landasan teori yaitu :
6
2.2.1 Crane
Crane adalah salah satu alat berat (heavy equipment) yang digunakan sebagai alat pengangkat dalam proyek konstruksi. Crane bekerja dengan mengangkat material yang akan dipindahkan, memindahkan secara horizontal, kemudian menurunkan material ditempat yang diinginkan. Alat ini memiliki bentuk dan kemampuan angkat yang besar dan mampu berputar hingga 360 derajat dan jangkauannya hingga puluhan meter.
Crane biasanya digunakan dalam pekerjaan proyek, pelabuhan, perbengkelan, industri, pergudangan dll.
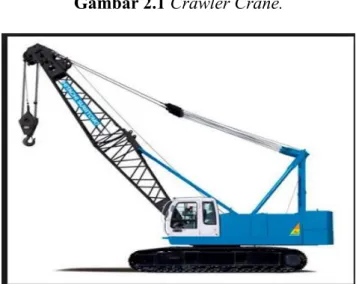
2.2.2 Jenis-jenis Utama Crane 2.2.2.1 Crane Crawler
Crawler crane merupakan pesawat pengangkat material yang biasa digunakan pada lokasi proyek pembangunan dengan jangkauan yang tidak terlalu panjang. Tipe ini mempunyai bagian atas yang dapat bergerak 360 derajat. Dengan roda crawler maka crane tipe ini dapat bergerak didalam lokasi proyek saat melakukan pekerjaannya. Pada saat crane akan digunakan diproyek lain maka crane diangkut dengan menggunakan lowbed trailer. Pengangkutan ini dilakukan dengan membongkar boom menjadi beberapa bagian untuk mempermudah pelaksanaan pengangkutan.
7
Gambar 2.1 Crawler Crane.
Sumber : http://www.sarens.com/media/catalog/Demag%20CC2800- 1/Brochure_CC2800-1.pdf
2.2.2.2 Mobile Crane
Mobile Crane (Truck Crane) adalah crane yang terdapat langsung pada mobile (Truck) sehingga dapat dengan mudah dibawa langsung pada lokasi kerja tanpa harus menggunakan kendaraan (trailer). Crane ini memiliki kaki (pondasi/tiang) yang dapat dipasangkan ketika beroperasi untuk menjaga crane tetap seimbang.
Truck crane ini dapat berputar 360 derajat.
Gambar 2.2 Mobile Crane.
Sumber : http://www.red-seal.ca/docms/mobilecraneop_noa2013_eng.pdf
8
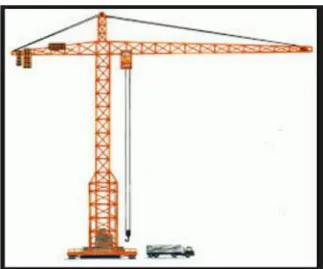
2.2.2.3 Tower Crane
Tower crane merupakan alat yang digunakan untuk mengangkat material secara vertical dan horizontal kesuatu tempat yang tinggi pada ruang gerak yang terbatas. Tipe crane ini dibagi berdasarkan cara crane tersebut berdiri yaitu crane yang dapat berdiri bebas (free standing crane), crane diatas rel (rail mounted crane), crane yang ditambatkan pada bangunan (tied-in tower crane) dan crane panjat (climbing crane).
Gambar 2.3 Tower Crane.
Sumber : https://www.academia.edu/34486145/TOWER_CRANE.pdf
2.2.2.4 Hydrolik Crane
Umumnya semua jenis crane menggunakan sistem hydrolik (minyak) dan pneumatik (udara) untuk dapat bekerja. Namun secara khusus Hydrolik crane adalah crane yang biasa digunakan pada perbengkelan dan pergudangan dll, yang memilki struktur sederhana.
Crane ini biasanya diletakkan pada suatu titik dan tidak untuk dipindah-pindah dan dengan jangkauan tidak terlalu panjang serta putaran yang hanya 180 derajat. Sehingga biasanya pada suatu perbengkelan/pergudangan terdapat lebih dari satu Crane.
9
Gambar 2.4 Hydrolik Crane.
Sumber : http://ijariie.com/AdminUploadPdf/HYDRAULIC_CRANE_ijariie5489.pdf
2.2.2.5 Hoist Crane
Hoist Crane adalah pesawat pengangkat yang biasanya terdapat pada pergudangan dan perbengkelan. Hoist Crane ditempatkan pada langit-langit dan berjalan diatas rel khusus yang yang dipasangi pada langit-langit tersebut. Rel-rel tadi juga dapat bergerak secara maju-mundur pada satu arah.
Gambar 2.5 Hoist Crane.
Sumber : https://www.scribd.com/document/393756276/Hoist-Crane-pdf
10
2.2.2.6 Jip Crane
Jip crane merupakan pesawat pengangkat yang terdiri dari berbagai ukuran, jip crane yang kecil biasanya digunakan pada perbengkelan dan pergudangan untuk memindahkan barang-barang yang relatif berat. Jip crane memilki sistem kerja dan mesin yang mirip seperti 'Hoist Crane' dan struktur yang mirip 'Hydraulik Crane'.
Gambar 2.6 Jip Crane.
Sumber : https://www.academia.edu/29534602/Jib_Crane
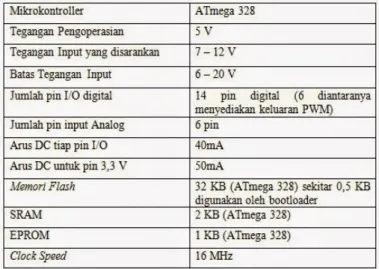
2.2.3 Arduino Uno
Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang ke adaptor DC atau baterai untuk menjalankannya.
11
Uno berbeda dengan semua board sebelumnya dalam hal koneksi USB-to-serial yaitu menggunakan fitur Atmega8U2 yang diprogram sebagai konverter USB-to-serial berbeda dengan board sebelumnya yang menggunakan chip FTDI driver USB-to-serial.
Gambar 2.7 Arduino Uno ATmega328.
Sumber : https://ilearning.me/sample-page-162/arduino/pengertian-arduino-uno/
Berikut ini adalah tabel spesifikasi dari Arduino Uno ATmega328 dapat kita lihat pada Tabel 2.2 dibawah ini.
Tabel 2.2 Spesifikasi Arduino Uno ATmega328.
Sumber : http://www.arduino.cc
2.2.4 Module Bluetooth
Bluetooth adalah protokol komunikasi wireless yang bekerja pada
12
frekuensi radio 2.4 GHz untuk pertukaran data pada perangkat bergerak seperti PDA, laptop, HP, dan lain-lain. Salah satu hasil contoh modul Bluetooth yang paling banyak digunakan adalah tipe HC-05. Modul Bluetooth HC-05 merupakan salah satu modul Bluetooth yang dapat ditemukan dipasaran dengan harga yang relatif murah. Modul Bluetooth HC-05 terdiri dari 6 pin konektor, yang setiap pin konektor memiliki fungsi yang berbeda-beda.
Gambar 2.8 Module Bluetooth HC-05.
Sumber :
https://www.tokopedia.com/search?q=module+bluetooth&sc=60&source=universe&st=product
Modul Bluetooth HC-05 dengan supply tegangan sebesar 5 V ke pin 12 modul Bluetooth sebagai VCC. Pin 1 pada modul Bluetooth sebagai transmitter. Kemudian pin 2 pada Bluetooth sebagai receiver.
Berikut ini adalah konfigurasi pin Bluetooth HC-05 ditunjukkan pada gambar 2.9 dibawah ini.
13
Gambar 2.9 Konfigurasi pin modul Bluetooth HC-05.
Sumber : Edoardo,2012
Konfigurasi pin modul Bluetooth HC-05 dapat dilihat pada tabel 2.3 berikut ini :
Tabel 2.3 Konfigurasi pin Module Bluetooth HC-05.
Sumber : http://eprints.polsri.ac.id/143/3/BAB%20II%20LA%20lusi.pdf
Module Bluetooth HC-05 merupakan Bluetooth yang bisa menjadi slave ataupun master hal ini dibuktikan dengan bisa memberikan notifikasi untuk melakukan pairing keperangkat lain, maupun perangkat lain tersebut yang melakukan pairing ke modul Bluetooth HC-05. Untuk mengatur perangkat Bluetooth dibutuhkan perintah-perintah AT command yang mana perintah tersebut akan direspon oleh perangkat Bluetooth jika modul
14
Bluetooth tidak dalam keadaan terkoneksi dengan perangkat lain. (Pahuja Ritika,2014)
2.2.5 Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. Motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Gambar 3.0 Motor Servo.
Sumber : https://www.nyebarilmu.com/cara-mengakses-motor-servo-menggunakan- arduino/
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai aplikasi lain seperti pada mobil
15
mainan radio kontrol, robot, pesawat, dan lain sebagainya seperti gambar 3.1 dibawah ini.
Gambar 3.1 Lengan Robot Model Motor Servo.
Sumber : https://id.aliexpress.com/item/Asli-6-DOF-Lengan-Robot-Model-
Motor-Servo-CNC-Metal-Lengan-Robot-Struktur-Servos-Robot- Industri/32887195155.html
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continous.
• Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros output nya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
• Motor servo rotation continous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
2.2.6 Bluetooth Interface
Bluetooth merupakan media komunikasi yang digunakan untuk
16
menghubungkan satu perangkat komunikasi dengan perangkat komunikasi lainnya. Fungsi dari Bluetooth sendiri adalah sebuah teknologi wireless yang sangat impresif mengenai hal menghubungkan gadget satu dengan gadget lainnya dalam jarak dekat untuk mempermudah melakukan pengiriman file yang terdapat pada perangkat komunikasi elektronik.
Definisi dari Bluetooth itu sendiri ialah sebuah teknologi tanpa kabel beroperasi dalam pita frekuensi 2,4 GHz (antara 2.402 GHz sampai dengan 2.480 GHz) dengan menggunakan sebuah frequency hopping transceiver yang mampu menyediakan layanan komunikasi data dan juga suara secara real-time antara host-host Bluetooth dengan jarak jangkauan yang terbatas.
Sistem Bluetooth terdiri atas : sebuah radio transceiver, baseband link Management dan Control, baseband (processor core, SRAM, UART, PCM USB Interface), flash dan voice codec. Lalu cara kerja Bluetooth sendiri adalah dengan menghubungkan baseband link controller ke baseband processing dan juga layer protokol fisik.
Gambar 3.2 Bluetooth on Android.
Sumber : http://theandroidworkshop.blogspot.com/2014/01/listening-to-bluetooth- connections.html
17
2.2.7 Motor DC
Motor DC adalah salah alat yang dapat mengubah energi listrik menjadi energi gerak berupa putaran. Pada motor DC, energi listrik yang digunakan adalah energi listrik dengan arus searah atau yang juga biasa dikenal dengan nama listrik DC. Oleh karena itu motor DC juga kerap disebut dengan nama motor arus searah.
Agar dapat bekerja, motor DC memerlukan suplay tegangan searah alias tegangan DC yang disambungkan melalui dua terminalnya. Motor DC bekerja dengan menghasilkan putaran per menit atau yang juga biasa dikenal dengan istilah RPM. Motor DC dapat berputar searah maupun berlawanan arah jarum jam.
Untuk membalikan arah putaran, cukup dengan membalikan polaritas listriknya. Pada umumnya sebuah motor DC memerlukan tegangan antara 1,5 volt sampai dengan 24 volt. Sedangkan untuk polaritasnya dari 3.000 RPM sampai dengan 8.000 RPM tergantung spesifikasi dan tegangan yang diberikan.
Semakin besar tegangan yang diberikan, maka semakin tinggi RPM nya. Dan semakin kecil tegangan yang diberikan, maka semakin rendah pula RMP nya. Batas minimum tegangan operasional yang bisa diberikan pada sebuah motor DC adalah 50%. Jika kurang dari 50% dari batas tegangan yang ditentukan maka motor tidak akan berputar.
Gambar 3.3 Motor DC.
Sumber : http://belajarelektronika.net/pengertian-motor-dc-fungsi-dan-prinsip- kerjanya/
2.2.8 Driver Motor L298N
L298N merupakan module driver motor DC yang paling banyak digunakan atau dipakai di dunia elektronika yang difungsikan untuk
18
mengontrol kecepatan serta arah perputaran motor DC. IC L298 merupakan sebuah IC tipe H-bridge yang mampu mengendalikan beban- beban induktif seperti relay, solenoid, motor DC dan motor stepper.
Pada IC L298 terdiri dari transistor-transistor logik (TTL) dengan gerbang nand yang berfungsi untuk memudahkan dalam menentukan arah putaran suatu motor dc maupun motor stepper. Kelebihan akan modul driver motor L298N ini yaitu dalam hal kepresisian dalam mengontrol motor sehingga motor lebih mudah untuk dikontrol.
Untuk dipasaran sudah terdapat modul driver motor menggunakan ic l298 ini, sehingga lebih praktis dalam penggunaannya karena pin I/O nya sudah terpackage dengan rapi dan mudah digunakan.
Gambar 3.4 Driver Motor L298N.
Sumber : https://www.nyebarilmu.com/tutorial-arduino-mengakses-driver-motor- l298n/
19
MULAIf ac
SELESAI
ac
2.2.9 Kerangka Penelitian
STUDI LITERATUR
PERANCANGAN CRANE
PEMBUATAN CRANE
PEMBUATAN KONTROL
PENGUJIAN KONTROL
APAKAH KONTROL
BEKERJA
?
1
TIDAK
YA
1
PENGUMPULAN DATA DAN ANALISIS
ANALISA DATA DAN PEMBUATAN LAPORAN
SARAN
APAKAH CRANE SUDAH SESUAI?
TIDAK
YA
20
BAB III
METODE PENELITIAN
Metode penelitian “Rancang Bangun Kontrol Crane Menggunakan Android Berbasis Mikrokontroler Arduino Uno” diimplementasikan dengan menggunakan aplikasi Smartphone Android kemudian dikirimkan ke mikrokontroler Arduino Uno ATmega328 melalui modul Bluetooth HC- 05. Langkah-langkah yang dilakukan untuk menyelesaikan penelitian adalah dengan melakukan studi literatur, membuat perancangan mekanik alat, membuat pemograman alat, dan perancangan user interface.
3.1 Studi Literatur
Studi literatur merupakan mempelajari dari materi-materi pendukung untuk menyelesaikan penelitian ini baik berupa buku, paper dari penelitian-penelitian sebelumnya, maupun dari internet. Materi-materi pendukung yang digunakan untuk menyelesaikan buku ini adalah pengetahuan mengenai pengontrolan alat menggunakan sistem Android, pembacaan skema pemograman, dan membuat efisiensi cara kerja sebuah alat [3].
3.2 Rancangan Sistem
Perancangan sistem adalah membangun model sistem berdasarkan rumusan masalah dan batasan masalah agar tujuan dari penelitian dapat
21
tercapai. Model sistem yang akan dibangun seperti pada Gambar 3.5 dibawah ini.
Gambar 3.5 Block Diagram Sistem.
Prinsip kerja dari alat ini dapat digambarkan pada blok diagram diatas. Arduino Uno digunakan sebagai mikrokontroler dari alat ini yang berfungsi untuk mengontrol Motor Servo dan Motor DC. Motor Servo berfungsi untuk menjalankan mekanisme pemutar (slewing mechanisme), sedangkan Motor DC yang dihubungkan dengan Driver Motor L298N berfungsi untuk sistem pengangkat (hoisting mechanisme). Driver Motor digunakan untuk mengatur kecepatan Motor DC dan arah putaran motor.
Kontrol crane menggunakan sebuah modul Bluetooth dimana Bluetooth
Sistem Android
Modul Bluetooth HC-05
Mikrokontroler Arduino Uno
ATmega328
Motor Servo
Motor DC Driver Motor
L298N
22
disini sebelumnya telah dipairing atau diselaraskan dengan Smartphone Android, Bluetooth disini digunakan sebagai upaya mengontrol motor servo pada crane [4].
3.3 Rancangan Hardware
3.3.1 Rancangan Bluetooth HC-05
Bluetooth merupakan alat komunikasi tanpa kabel dengan frekuensi radio 2.4 GHz untuk pertukaran data pada perangkat bergerak yang digunakan untuk menghubungkan perangkat satu dengan yang lain.
Maka dari itu, alat yang peneliti buat menggunakan Bluetooth HC-05 sebagai penerima data dan Bluetooth pada Smartphone Android sebagai pengirim datanya. Pada Bluetooth HC-05 sebagai serialnya menggunakan RX dan TX untuk dihubungkan pada arduino. Untuk komunikasi antara arduino dan Bluetooth pin RX dan TX pada Bluetooth dan arduino di cross atau disilang, jadi RX pada Bluetooth dihubungkan pada TX arduino dan TX pada Bluetooth dihubungkan pada RX di arduino seperti pada gambar 3.6. Jika tidak demikian maka komunikasi antara Bluetooth dan arduino tidak dapat dilakukan. Pada pengujian jarak Bluetooth yaitu 2m, 4m, 6m, 8m, 10m, 12m, 15m [5]. Untuk rangkaian Bluetooth pada arduino uno ATmega328 dapat dilihat pada Gambar 3.7.
23
Gambar 3.6 Bluetooth to serial Module HC-05.
Bluetooth HC-05 Arduino Atmega328 Gambar 3.7 Rancangan Bluetooth HC-05 pada Arduino.
Sumber : https://http://www.boarduino.web.id/2016/01/cara-masuk-ke-mode-at-command-hc- 05.html
3.3.2 Rancangan Rangkaian Motor Servo
Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup dimana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari rangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan
3,3 v TXD RXD GND
3,3 v
RXD TXD
GND
24
sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo[6]. Maka dari itu, peneliti menggunakan tipe servo Tower pro DS04-NFC untuk sistem slewing. Pada Gambar 3.8 di bawah ini adalah sebuah rangkaian motor servo pada Arduino Uno ATmega328.
Gambar 3.8 Rancangan Motor Servo pada Arduino.
Sumber : https://https://www.nyebarilmu.com/cara-mengakses-motor-servo-
menggunakan-arduino/
3.3.3 Rancangan Rangkaian Driver Motor L298N
IC L298 merupakan sebuah IC tipe H-bridge yang mampu mengendalikan beban-beban induktif seperti relay, solenoid, motor DC dan motor stepper. Pada IC L298 terdiri dari transistor-transistor logik
25
(TTL) dengan gerbang nand yang berfungsi untuk memudahkan dalam menentukan arah putaran suatu motor dc maupun motor stepper[7]. Maka dari itu, peneliti menggunakan driver tipe L298N yang disambung ke motor dc untuk menjalankan sistem hoisting. Pada Gambar 3.9 di bawah ini adalah sebuah rangkaian motor dc beserta driver motor yang diselaraskan pada Arduino Uno ATmega328.
Gambar 3.9 Modul Driver Motor L298N.
Sumber : https://www.nyebarilmu.com/tutorial-arduino-mengakses-driver-motor-l298n/
3.4 Rancangan Bluetooth Interface
Rancang Bluetooth interface yang digunakan pada penelitian ini menggunakan program Android. Bluetooth interface merupakan mekanisme komunikasi antara pengguna (user) dengan sistem Mikrokontroler Arduino. Pada bluetooth interface dibuat sedemikian rupa hingga user mudah dalam pengendaliannya. Rancang bluetooth interface pada penelitian dapat dilihat pada gambar 4.0 dibawah ini.
26
Gambar 4.0 Rancangan Bluetooth Interface.
HOIST POWER BUTTON SLEWING
3.5 Rancangan Prototype Tower Crane
Proses pembuatan hardware secara mekanik pada penelitian ini berupa pembuatan prototype, tampilan prototype ditampilkan pada Gambar 4.1 berikut:
Gambar 4.1 Rancangan Prototype Tower Crane.
27
3.6 Rancangan Pengujian
Rancang pengujian pada penelitian ini diterapkan pada rancang prototype crane yang diberikan perintah dengan menggunakan kontrol lewat Android. Awalnya Android memberikan instruksi untuk dikirim lewat Bluetooth Interface dan diterima oleh Module Bluetooth dilanjutkan ke mikrokontroler arduino untuk dieksekusi oleh Motor Servo pada Tower Crane berupa pergerakan di bagian slewing crane. Kemudian Android memberikan perintah kedua lewat Driver Motor L298N ke Motor DC untuk mengoperasikan hoist pada crane [8].
39
DAFTAR PUSTAKA
[1] America, C. M. (1994). Spesifications fot top running bridge & gantry type multiple grider electric overhead travelling cranes. Charlottw, NC:
CMAA. BS. (n.d.). BS 466-POWER DRIVEN OVERHEAD TRAVELLING CRANE. 36/0.
[2] Dingyu Xue, Y. C. (2016, September 12). PID Controller Design. Retrieved September 12, 2016, from PID Controller Design Web Site:
https://www.siam.org/books/dc14/DC14Sample.pdf.
[3] Kurniawan, Edi. (2018). Rancang Bangun Monitoring Suhu Pada Kontainer Pendingin Menggunakan Mikrokontroller Berbasis WIFI SHIELD ESP 8266. Politeknik Pelayaran Surabaya.
[4] G.W, Radean. (2016). Pengatur Gerakan Crane Secara Nirkabel. Universitas Nuswantoro : Semarang.
[5] Tim DiyTech (2012). Bluetooth Module.Dipetik December 14, 2013 dari http://diytech.net/2012/03/07/dalam-beberapa-aplikasi-atau-disain- kadangkala-kitamemerlukan/.
[6] Saftari, Firmansyah. 2002. Proyek Robotika Keren dengan Arduino. Jakarta. Alex Media Komputindo.
[7] Faudin, Agus. 2017. “In Arduino Projects Tutorial”. Malang. Nyebar Ilmu.
[8] Zawawi, M.A., dkk. 2011. “Feedback Control Scheme for Gantry Crane System incorporating Payload”, IEEE Symposium on Industrial and Applications (ISIEA2011).