TUGAS AKHIR
RANCANG BANGUN GERBANG DENGAN MENGGUNAKAN KONTROL ANDROID VIA BLUETOOTH BERBASIS
ARDUINO UNO R3
Oleh :
RIFYANSYAH 142411078
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
2017
LEMBAR PERSETUJUAN
Judul : Rancang Bangun Gerbang Dengan
Menggunakan Kontrol Android Via Bluetooth Berbasis Arduino Uno R3
Kategori : Tugas Akhir
Nama : Rifyansyah
NomorIndukMahasiswa :142411078
Program Studi : Diploma (D-3) Metrologi dan Instrumentasi
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatra Utara
Diluluskan di Medan, 21 Juli 2017
Disetujui Oleh
Ketua Program Studi D-3 Metrologi Dosen Pembimbing dan Instrumentasi
Dr. Diana Alemin Barus, M.Sc. Dr. Diana Alemin Barus, M.Sc.
NIP: 196607291992032002 NIP: 196607291992032002
PERNYATAAN
RANCANG BANGUN GERBANG DENGAN MENGGUNAKAN KONTROL ANDROID VIA BLUETOOTH BERBASIS ARDUINO UNO R3
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 21 Juli 2017
Rifyansyah 142411078
ABSTRAK
Tugas akhir ini memaparkan hasil penelitian tentang rancang bangun prototype perangkat sistem pengendali pintu gerbang otomatis berbasis Arduino dan sistem operasi Android. Pembuatan alat dilakukan sebagai salah satu usaha dalam kemajuan teknologi untuk memberikan kemudahan dan kenyamanan melalui pengembangan sistem otomasi pada rumah berupa pintu gerbang otomatis.
Komponen yang digunakan untuk perancangan sistem adalah modul mikrokontroler Arduino Uno R3, Modul Bluetooth HC-05, Motor Servo, Buzzer dan telepon pintar berbasis Android, sedangkan perancangan software menggunakan Arduino IDE dan APP Inventor2. Berdasarkan hasil pengukuran dan pengujian, sistem pada alat yang dibuat mampu membuka dan menutup pintu gerbang secara otomatis pada jarak maksimum 11 meter dengan waktu respon maksimum 1 detik dalam keadaan ruang terbuka.
Kata Kunci : Android, Motor Servo, Mikrokontroler Arduino Uno R3, Bluetooth Hc05, Buzzer
KATA PENGANTAR
Assalamualaikum warahmatullahi wabarakatuh,
Puji syukur kami panjatkan kehadirat Allah SWT, atas banyaknya berkah, rahmat dan hidayahNya sehingga tugas akhir ini dapat terselesaikan dengan baik.
salam dan salawat kepada Rasulullah Muhammad SAW sebagai tauladan kami yang telah menghantarkan kita selalu menuntut ilmu untuk bekal dunia dan akhirat.
Akhirnya penyusunan tugas akhir Rancang Bangun Gerbang Dengan Menggunakan Kontrol Android Via Bluetooth Berbasis Arduino Uno R3 dapat dirampungkan. Tugas Akhir ini merupakan salah satu syarat memperoleh gelar Ahli Madya pada Jurusan D-3 Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Penghargaan dan ucapan terima kasih kepada kedua orang tua penulis, terima kasih atas doa dan sumber inspirasi agar dapat melakukan yang terbaik. Tak lupa penulis menyampaikan terima kasih dan penghargaan yang setinggitingginya kepada semua pihak yang telah memberikan bimbingan dan petunjuk, terutama kepada :
1. Seluruh keluarga yang telah memberikan dukungan moral dan moril selama pembuatan tugas akhir ini.
2. Ibu Dr. Diana Alemin Barus, M.Sc. selaku Pembimbing yang telah membimbing dan mengarahkan kepada Penulis dalam menyelesaikan Tugas Akhir ini.
3. Bapak Dr.Kerista Sebayang, M.S selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatra Utara .
4. Bapak Dr.Saharman Gea Ph.D selaku Pembantu Dekan III Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatra Utara . 5. Ibu Dr. Diana Alemin Barus, M.Sc. selaku Ketua Program Studi D-3
Fisika Fakultas MIPA Universitas Sumatra Utara .
6. Seluruh Staf Pengajar/Pegawai Program Studi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatra Utara .
7. Rekan D-III Metrologi dan Instrumentasi yang memberikan bantuan penulisan untuk menyelesaikan Tugas Akhir ini.
Semoga bantuan dan dukungan yang telah di berikan mendapatkan ridho dan balasan dari Allah SWT.
Penulis sadar bahwa tugas akhir ini masih banyak kekurangan, namun penulis berharap tugas akhir ini memberikan kontribusi sekecil apapun bagi kemajuan ilmu pengetahuan dan teknologi serta wacana bagi mahasiswa D-3 Metrologi dan Instrumentasi.
Akhir kata semoga tugas akhir ini dapat bermanfaat bagi semua pihak dan semoga Allah SWT senantiasa melimpahkan rahmat dan karunia-Nya, Amin.
Medan, 21 Juli 2017
DAFTAR ISI
Halaman
ABSTRAK i
KATA PENGANTAR ii
DAFTAR ISI iv
DAFTAR GAMBAR vii
DAFTAR TABEL viii
BAB I PENDAHULUAN 1
1.1.Latar Belakang 1
1.2.Rumusan Masalah 2
1.3.Tujuan Penelitian 2
1.4.Batasan Masalah 2
1.5.Metode Penulisan 3
1.6.Sistematika Penulisan 4
BAB II LANDASAN TEORI 5
2.1. Mikrokontroler Arduino Uno R3 5
2.1.1. Input & Output 6
2.1.2.Komunikasi 7
2.1.3. Software Arduino 7
2.1.4. Bahasa Pemtograman Arduino 8
2.1.5.Proteksi Arus Lebih USB 11
2.1.6.Karakter Fisik Arduino 11
2.2. Bluetooth Hc-05 11
2.3. Motor Servo 13
2.4. Buzzer 14
2.5. LCD 15
2.6. Android 16
BAB III METODOLOGI PENELITIAN 17
3.1.Waktu dan Tempat 17
3.2. Alat dan Bahan 17
3.3. Spesfikasi Sistem 18
3.4.Rangkaian Keseluruhan Sitem 19
3.4.1. Rangkaian Power Supply 19
3.4.2. Rangkaian Bagian Input 20
3.4.21. Rangkaian Bluetooth 20
3.4.3. Rangkaian Bagian Output 20
3.4.3.1. Rangkaian Motor Servo 20
3.4.3.2. Rangkaian LCD 21
3.4.3.3. Rangkaian Buzzer 22
3.4.3.4. Rangkaian LED 23
3.5. Software Pemrograman Dan Program Gerbang 24 3.5.1. Software Arduino.cc 1.6.7 24 3.5.2. Program Gerbang dengan control android 24
3.7. Perakitan 28
3.8. Flowchart Sistem Kerja Gerbang control android 29
BAB IV PENGUJIAN DAN HASIL 31
4.2.Pengujian Rangkaian Mikrokontroler Arduino Uno R3 31 4.3.Pengujian Bluetooth dengan Android dan driver Servo 32 4.4.Pengujian Bluetooth dengan Android (jarak) 34
4.5.Pengujian LCD 35
BAB V PENUTUP 37
5.1.Kesimpulan 37
5.2.Saran 37
DAFTAR PUSATAKA 39
LAMPIRAN
1. Data sheet arduino 2. Data sheet LCD 16x2
3. Data sheet Module Bluetooth hc-05 4. Data sheet Motor servo
DAFTAR GAMBAR
Halaman
2.1. Arduino Uno R3 11
2.2. Bluetooth HC-05 12
2.3. Motor Servo 13
2.4. Buzzer 14
2.5. LCD 15
3.1.Diagram Blok System 18
3.2.Rangkaian Sumber Tegangan 19
3.3. Hubungan Antara Arduino dengan Bluetooth 20
3.4. Hubungan Arduino Dengan servo 21
3.5. Hubungan Arduino Dengan LCD 21
3.6. Hubungan Buzzer Dengan Arduino 22
3.7. Hubungan LED Dengan Arduino 23
3.8. Software Arduino.cc 24
3.9. Penulisan Program Pada software Arduino 27
3.10. Tampilan saat proses Compile dan Upload 27 3.11. Prototype Gerbang Dengan Kontrol Android 28 3.12. Flowchart Sistem Kerja Gerbang dengan Kontrol Android 29 4.1. Informasi Signature Mikrokontroler Arduino Uno R3 41
DAFTAR TABEL
Halaman
2.1. Deskripsi Arduino 6
4.1. Data Pengujian Bluetooth Dengan Android (Kendali) 32 4.2. Data Pengujian Bluetooth Dengan Android (Jarak) 34
4.3. Data Pengujian LCD 35
BAB I PENDAHULUAN
1.1. Latar Belakang
Kemajuan teknologi yang sangat pesat memungkinkan adanya berbagai usaha untuk memberikan kemudahan dan kenyamanan bagi manusia. Salah satu usaha untuk memberikan kemudahan dan kenyamanan tersebut adalah melalui pengembangan sistem otomasi pada rumah (Home Automation). Salah satu sistem otomasi yang dapat diterapkan di rumah adalah sistem yang dapat membuka pintu gerbang secara otomatis. Melalui pengembangan sistem ini diharapkan penghuni rumah dapat membuka pintu gerbang dari jarak tertentu tanpa harus berinteraksi langsung dengan gerbang tersebut.
Berdasarkan perkembangan teknologi khusususnya bidang elektronika telekomunikasi dan industri, terdapat suatu sistem mikrokontroler terbaru yaitu Arduino Uno yang dapat dimanfaatkan untuk dikomunikasikan dengan smartphone Android melalui modul Bluetooth HC-05, sehingga bisa digunakan untuk aplikasi membuka pintu gerbang tanpa menggunakan cara yang konvensional, namun cukup diakses melalui smartphone Android saja.
Dengan latar belakang tersebut maka penulis membuat “Rancang Bangun Gerbang Dengan Menggunakan Kontrol Android Via Bluetooth Berbasis Arduino Uno R3 ”. Sebagai pembahasan dalam Tugas Akhir yang dibuat oleh penulis.
1.2. Rumusan Masalah
Permasalahan utama pada pembuatan tugas akhir ini adalah membahas rancang bangun Gerbang otomatis menggunakan kontrol android sebagai pengatur gerakan Motor Servo. Perancangan gerbang otomatis menyangkut perancangan perangkat keras dan perangkat lunak sehingga dihasilkan sebuah prototype gerbang otomatis. Actuator motor servo digunakan sebagai penggerak utama untuk membuka gerbang dan arduino uno R3 sebagai mikrokontrolernya.
Software yang digunakan untuk penulisan program adalah Arduino.cc dan transmitter yang digunakan dari android ke arduino adalah Bluetooth hc-05.
1.3. Tujuan Penelitian
Adapun tujuan dari dibuatnya alat ini adalah :
1. Untuk merancang dan membuat prototype gerbang rumah menggunakan kontrol android via Bluetooth berbasis arduino uno R3.
2. Untuk merancang gerbang otomatis yang dapat membuka gerbang dengan menggunakan Android
3. Memperkaya pengetahuan penulis dan pembaca tentang Mikrokontroler dan aplikasinya.
1.4. Batasan Masalah
Agar perancangan yang dibahas dalam tugas akhir ini tidak terlalu luas dan menyimpang dari topik yang telah ditentukan, maka penulis perlu membatasi permasalahan sebagai berikut:
1. Perancangan yang dilakukan adalah merancang perangkat keras dan perangkat lunak sedemikan rupa sehingga dihasilkan sebuah prototype gerbang yang dikontrol melalui android.
2. Pembahasan tentang mikrokontroler Arduino Uno R3 hanya sebatas yang berkaitan dengan perancangan ini.
3. Pembahasan mengenai perangkat keras dan perangkat lunak sebatas teori umum dan yang berkaitan dengan perancangan Gerbang control jarak jauh.
4. Pembahasan cara kerja gerbang hanya sebatas menurut kebutuhan yang meliputi analisis rangkaian tiap-tiap blok baik secara perangkat keras maupun perangkat lunak.
1.5. Metode Penulisan
Adapun metode penulisan yang digunakan dalam menyusun dan menganalisa proyek ini adalah:
1. Studi literatur yang berhubungan dengan perancanangan dan pembuatan alat ini.
2. Perencanaan dan pembuatan alat baik software maupun hardware.
3. Analisis dan uji coba fungsi dari kesuluruhan alat.
1.6. Sistematika Penulisan
Untuk mempermudah penyusunan laporan, maka dalam hal ini penulis membagi dalam beberapa bab, serta memberikan gambaran secara garis besar isi dari tiap-tiap bab.
BAB I : PENDAHULUAN
Bab ini berisikan latar belakang masalah, tujuan dan manfaaat penelitian, identifikasi masalah, pembatasan masalah, rumusan masalah, metode penelitian, serta sistematika penulisan.
BAB II : LANDASAN TEORI
Bab ini merupakan landasan teori yang membahas tentang teoriteori yang mendukung dalam penyelesaian masalah.
BAB III : METODOLOGI PENELITIAN
Meliputi metode, bahan alat, perancangan dan pengambilan data penelitian.
BAB IV : HASIL dan ANALISA Meliputi hasil uji coba dan pembahasan.
BAB V : KESIMPULAN dan SARAN
Berisikan kesimpulan tentang hasil rancangan yang telah dibuat serta saran dalam pengembangan rancangan tersebut.
BAB II
LANDASAN TEORI
2.1. Mikrokontroler Arduino Uno R3
Arduino adalah sebuah board mikrokontroller yang berbasis ATmega328.
Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tombol reset. Arduino mampu mensupport mikrokontroller;
dapat dikoneksikan dengan komputer menggunakan kabel USB.
Arduino memiliki kelebihan tersendiri disbanding board mikrokontroler yang lain selain bersifat open source, arduino juga mempunyai bahasa pemrogramanya sendiri yang berupa bahasa C. Selain itu dalam board arduino sendiri sudah terdapat loader yang berupa USB sehingga memudahkan kita ketika kita memprogram mikrokontroler didalam arduino.
Sedangkan pada kebanyakan board mikrokontroler yang lain yang masih membutuhkan rangkaian loader terpisah untuk memasukkan program ketika kita memprogram mikrokontroler. Port USB tersebut selain untuk loader ketika memprogram, bisa juga difungsikan sebagai port komunikasi serial.
Bahasa pemrograman arduino merupakan bahasa C yang sudah disederhanakan syntax bahasa pemrogramannya sehingga mempermudah kita dalam mempelajari dan mendalami mikrokontroller.
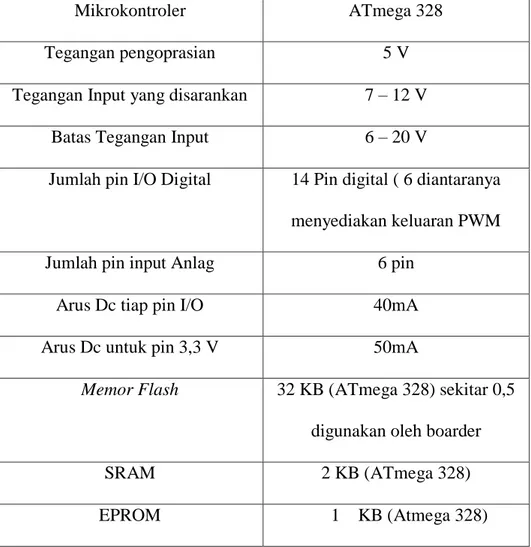
Tabel 2.1 Deskripsi Arduino
Mikrokontroler ATmega 328
Tegangan pengoprasian 5 V
Tegangan Input yang disarankan 7 – 12 V
Batas Tegangan Input 6 – 20 V
Jumlah pin I/O Digital 14 Pin digital ( 6 diantaranya menyediakan keluaran PWM
Jumlah pin input Anlag 6 pin
Arus Dc tiap pin I/O 40mA
Arus Dc untuk pin 3,3 V 50mA
Memor Flash 32 KB (ATmega 328) sekitar 0,5 digunakan oleh boarder
SRAM 2 KB (ATmega 328)
EPROM 1 KB (Atmega 328)
2.1.1. Input & Output
Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead().
Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected oleh default) 20-50K Ohm. Beberapa pin memiliki fungsi sebagai berikut :
1 Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim (TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB ke TTL chip serial.
2 Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah interap pada low value, rising atau falling edge, atau perubahan nilai.
3 PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi analogWrite().
4 SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mensuport komunikasi SPI, yang mana masih mendukung hardware, yang tidak termasuk pada bahasa arduino.
5 LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13. Ketika pin bernilai HIGH, LED hidup, ketika pin LOW, LED mati.
2.1.2. Komunikasi
Uno Arduino memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lain. ATmega328 ini menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Firmware Arduino menggunakan USB driver standar COM, dan tidak ada driver eksternal yang dibutuhkan. Namun, pada Windows, file. Ini diperlukan.
Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data sederhana yang akan dikirim ke board Arduino. RX dan TX LED di board akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan koneksi USB ke komputer.
2.1.3. Software Arduino
ATMega328 di Arduino terdapat bootloader yang memungkinkan Anda untuk meng-upload kode baru untuk itu tanpa menggunakan programmer hardware eksternal.
IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh mikrokontroler adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke dalam memory didalam papan Arduino.
Sebuah kode program Arduino umumnya disebut dengan istilah sketch.
Kata“sketch” digunakan secara bergantian dengan “kode program” dimana keduanya memiliki arti yang sama.
2.1.4. Bahasa Pemograman Arduino
Seperti yang telah dijelaskan diatas program Arduino sendiri menggunakan bahasa C. walaupun banyak sekali terdapat bahasa pemrograman tingkat tinggi (high level language) seperti pascal, basic, cobol, dan lainnya. Walaupun demikian, sebagian besar dari paraprogramer profesional masih tetap memilih bahasa C sebagai bahasa yang lebih unggul, berikut alasan-alasannya:
1. Bahasa C merupakan bahasa yang powerful dan fleksibel yang telah
terbukti dapat menyelesaikan program-program besar seperti pembuatan sistem operasi, pengolah gambar (seperti pembuatan game) dan juga pembuatan kompilator bahasa pemrograman baru.
2. Bahasa C merupakan bahasa yang portabel sehingga dapat dijalankan di beberapa sistem operasi yang berbeda. Sebagai contoh program yang kita tulis dalam sistem operasi windows dapat kita kompilasi didalam sistem operasi linux dengan sedikit ataupun tanpa perubahan sama sekali.
3. Bahasa C merupakan bahasa yang sangat populer dan banyak digunakan oleh programer berpengalaman sehingga kemungkinan besar library pemrograman telah banyak disediakan oelh pihak luar/lain dan dapat diperoleh dengan mudah.
4. Bahasa C merupakan bahasa yang bersifat modular, yaitu tersusun atas rutin-rutin tertentu yang dinamakan dengan fungsi (function) dan fungsi-fungsi tersebut dapat digunakan kembali untuk pembuatan program-program lainnya tanpa harus menulis ulang implementasinya.
5. Bahasa C merupakan bahasa tingkat menengah (middle level language) sehingga mudah untuk melakukan interface (pembuatan program antar muka) ke perangkat keras.
6. Struktur penulisan program dalam bahasa C harus memiliki fungsi utama, yang bernama main(). Fungsi inilah yang akan dipanggil pertama kali pada saat proses eksekusi program. Artinya apabila kita mempunyai fungsi lainselain fungsi utama, maka fungsi lain tersebut baru akan dipanggil pada saat digunakan.
Selain itu juga dalam bahasa C kita akan mengenal file header, biasa ditulis
menyimpan daftar-daftar fungsi yang akan digunakan dalam program. Bagi anda yang sebelumnya pernah mempelajari bahasa pascal, file header ini serupa dengan unit. Dalam bahasa C, file header standar yang untuk proses input/output adalah
<stdio.h>.
Perlu sekali untuk diperhatikan bahwa apabila kita menggunakan file header yang telah disediakan oleh kompilator, maka kita harus menuliskannya didalam tanda„<‟ dan „>‟ (misalnya <stdio.h>). Namun apabila menggunakan file header yang kita buat sendiri, maka file tersebut ditulis diantara tanda “ dan ” (misalnya
“cobaheader.h”). perbedaan antara keduanya terletakpada saat pencerian file tersebut. Apabila kita menggunakan tanda <>, maka file tersebut dianggap berada pada direktori default yang telah ditentukan oleh kompilator. Sedangkan apabila kita menggunakan tanda “”, maka file header dapat kita dapat tentukan sendiri lokasinya.
File header yang akan kita gunakan harus kita daftarkan dengan menggunakan directive #include. Directive #include ini berfungsi untuk memberi tahu kepada kompilator bahwa program yang kita buat akan menggunakan file- file yang didaftarkan. Berikut ini contoh penggunaan directive #include.
#include<stdio.h>
#include<stdlib.h>
#include”myheader.h”
Setiap kita akan menggunakan fungsi tertentu yang disimpan dalam sebuah file header, maka kita juga harus mendaftarkan file headernya dengan menggunakan directive #include. Sebagai contoh, kita akan menggunakan fungsi getch() dalam program, maka kita harus mendaftarkan file header<conio.h>.
2.1.5. Proteksi Aruslebih USB
Arduino UNO mempunyai sebuah sebuah sekring reset yang memproteksi port USB komputer dari hubungan pendek dan arus lebih. Walaupun sebagian besar komputer menyediakan proteksi internal sendiri, sekring menyediakan sebuah proteksi tambahan. Jika lebih dari 500 mA diterima port USB, sekring secara otomatis akan memutuskan koneksi sampai hubungan pendek atau kelebihan beban hilang.
2.1.6. Karakteristik Fisik
Panjang dan lebar maksimum dari PCB Arduino UNO masing-masingnya adalah 2.7 dan 2.1 inci, dengan konektor USB dan power jack yang memperluas dimensinya. Empat lubang sekrup memungkinkan board untuk dipasangkan ke sebuah permukaan atau kotak. Sebagai catatan, bahwa jarak antara pin digital 7 dan 8 adalah 160 mil. (0.16"), bukan sebuah kelipatan genap dari jarak 100 mil dari pin lainnya.
Gambar 2.1 Arduino Uno R3
2.2. Bluetooth Hc-05
Bluetooth Module HC-05 merupakan module komunikasi nirkabel pada
digunakan dengan mikrokontroler untuk membuat aplikasi wireless. Interface yang digunakan adalah serial RXD, TXD, VCC dan GND. Built in LED sebagai indikator koneksi bluetooth. Tegangan input antara 3.6 ~ 6V, jangan menghubungkan dengan sumber daya lebih dari 7V. Arus saat unpaired sekitar 30mA, dan saat paired (terhubung) sebesar 10mA. 4 pin interface 3.3V dapat langsung dihubungkan ke berbagai macam mikrokontroler (khusus Arduino, 8051, 8535, AVR, PIC, ARM, MSP430, etc.).
Gambar 2.2 Bluetooth Hc-05
Jarak efektif jangkauan sebesar 10 meter, meskipun dapat mencapai lebih dari 10 meter, namun kualitas koneksi makin berkurang. Seri modul BT HC bisa dikenali dari nomor serinya, jika nomer serinya genap maka modul BT tersebut sudah diset oleh pabrik, bekerja sebagai slave atau master dan tidak dapat diubah mode kerjanya, contoh adalah HC-06-S. Modul BT ini akan bekerja sebagai BT Slave dan tidak bisa diubah menjadi Master, demikian juga sebaliknya misalnya HC-04M.
Default mode kerja untuk modul BT HC dengan seri genap adalah sebagai Slave. Sedangkan modul BT HC dengan nomer seri ganjil, misalkan HC-05, kondisi default biasanya diset sebagai Slave mode, tetapi pengguna bisa mengubahnya menjadi mode Master dengan AT Command tertentu. Penggunaan utama dari modul BT ini adalah menggantikan komunikasi serial via kabel.
2.3. Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer.
Gambar 2.3 Motor Servo
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continuous.
1. Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
2. Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran
porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
2.4. Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
Gambar 2.4 Buzzer
Buzzer elektronik ini dapat diciptakan dengan merangkaikan beberapa komponen yang pada prinsipnya alat ini dapat menimbulkan pulsa dimana arus listrik adalah sebagai indikator terciptanya pulsa tersebut. Pada pembuatan alat ini, kami menggunakan IC NE555 sebagai sistem pembangkit pulsa yang tentunya arus listrik adalah indicator utama daripada pembangkit sinyalnya.Namun IC NE555 bukanlah satu – satunya komponen yang digunakan. Disini kami
menambahkan beberapa komponen pelengkap yang sama bergunanya dalam pembuatan alat ini. Komponen – komponen itu antara lain adalah 1 buah potensiometer 10k dan Resistor 330KΩ.
2.5. LCD
LCD (Liquid Cristal Display) berfungsi untuk menampilkan karakter angka, huruf ataupun simbol dengan lebih baik dan dengan konsumsi arus yang rendah.
LCD (Liquid Cristal Display) dot matrik M1632 merupakan modul LCD buatan hitachi. Modul LCD (Liquid Cristal Display) dot matrik M1632 terdiri dari bagian penampil karakter (LCD) yang berfungsi menampilkan karakter dan bagian sistem prosesor LCD dalam bentuk modul dengan mikrokontroler yang diletakan dibagian belakan LCD tersebut yang berfungsi untuk mengatur tampilan LCD serta mengatur komunikasi antara LCD dengan mikrokontroler yang menggunakan modul LCD tersebut.
Fungsi Pin LCD (Liquid Cristal Display) Dot Matrix 2×16 M1632
DB0 – DB7 adalah jalur data (data bus) yang berfungsi sebagai jalur komunikasi untuk mengirimkan dan menerima data atau instruksi dari mikrokontrooler ke modul LCD.
RS adalah pin yang berfungsi sebagai selektor register (register sellect) yaitu dengan memberikan logika low (0) sebagai register perintah dan logika high (1) sebagai register data.
R/W adalah pin yang berfungsi untuk menentukan mode baca atau tulis dari data yang terdapat pada DB0 – DB7. Yaitu dengan memberikan logika low (0) untuk fungsi read dan logika high (1) untuk mode write.
Enable (E), berfungsi sebagai Enable Clock LCD, logika 1 setiap kali pengiriman atau pembacaan data.
2.6. Android
Android adalah sistem operasi berbasis linux yang drancang untuk perangkat bergerak layar sentuh seperti telepon pintar dan dan computer tablet.
Anatar muka pengguna android umumnya berupa manipulasi langsung, menggunakan gerakan sentuh yang serupa dengan tindakan nyata, misalnya menggeser, mengetuk, dan mencubit untuk memanipulasi layar, serta papan ketik virtual untuk menulis teks. Pada perancangan robot ini android digunakan sebagai pusat kendali untuk mengendalikan robot. Pengendalian dilakukan secara manual yaitu dengan cara membuka aplikasi yang telah terinstall di android.
BAB III
METODOLOGI PENELITIAN
3.1. Waktu dan Tempat
Perancangan ini telah dilakukan pada bulan Juni 2017 sampai Juli 2017 di rumah tinggal Padang Bulan dan Fakultas Matematika dan Ilmu Pengetahuan Alam.
3.2. Alat dan Bahan
A. Alat yang Digunakan Dalam Penelitian Ini
1. Satu set komputer berfungsi untuk pengelolaan data dan pemrograman 2. Bor listrik berfungsi untuk melubangi material
3. Solder berfungsi untuk mencairakan timah dan menyambung beberapa komponen elektronik
4. Lem tembak berfungsi untuk melekatkan sterofoam dan menyatukan masing – masing komponen
5. Kabel Ties berfungsi untuk merapikan jumper B. Bahan yang Digunakan
Komponen Mekanik
1. sterofoam sebagai tumpuan/tempat meletakkan alat 2. Mur dan baut sebagai penyambung komponen dari robot 3. Adaptor digunakan sebagai supply tegangan
Komponen Elektronik
1. Arduino berfungsi sebagai mikrokontroler dari alat
2. Modul Bluetooth HC-05 berfungsi sebagai transmitter antara android dan Arduino
3. Servo berfungsi untuk menggerakkan gerbang 4. Adaptor berfungsi sebagai supply tegangan
3.3. Spesifikasi Sistem
Dalam perancangan gerbang control jarak jauh ini mikrokontroler Arduino Uno R3 digunakan sebagai komponen utama yang mengatur komponen lainnya seperti: Bluetooth, Servo dan Buzzer. Hardware gerbang dirancang sedemikian rupa sehingga menjadi sebuah prototype gerbang yang berbentuk seperti rumah yang dilengkapi dengan gerbang yang dikontrol melalui android. Sistem Kendali dilakukan secara manual melalui android, transmitter yang digunakan adalah module Bluetooth Hc-05.
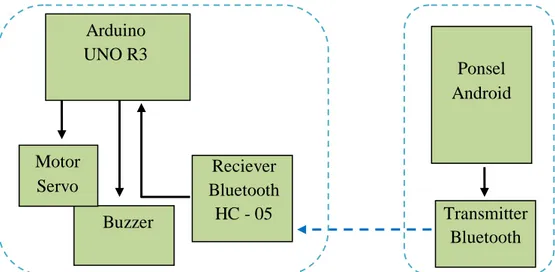
Hardware dari alat dirancang sesuai diagram blok yang terdapat pada gambar berikut.
Gambar 3.1 Diagram blok system
Ponsel Android
Transmitter Bluetooth Reciever
Bluetooth HC - 05 Arduino
UNO R3
Motor Servo
Buzzer
Berdasarkan blok di atas Mirokontroler menerima masukan dari Bluetooth.
masukkan dari android yang ditransmitterkan ke Arduino melalui Bluetooth, mikrokontroler arduino akan dapat menggerakkan motor servo yang akan membuka dan menutup gerbang dan ketika gerbang dibuka mikrokontroler juga akan mengaktifkan buzzer seagai indicator bunyi.
3.4. Rangkaian Keseluruhan Sistem
Rangkaian keseluruhan sistem dari gerbang dengan control android dibagi menjadi 3 bagian yaitu : power supply, bagian input dan bagian output . Bagian power supply merupakan input tegangan yang didapat melalui adaptor. Bagian input terdiri dari 1 buah input yaitu Bluetooth Hc-05. Bagian output terdiri dari motor servo dan buzzer.
3.4.1. Rangkaian Power supply
Bagian power supply ini menggunakan adaptor 12 v yang akan dihubungkan langsung dengan arduino, hubungan keduanya dapat dilihat pada gambar berikut.
Adaptor 12 V
3.4.2. Rangkaian Bagian Input 3.4.2.1. Rangkaian Bluetooth
Pada gerbang control android ini Bluetooth yang digunakan adalah Bluetooth Hc-05. Penggunaan Bluetooth adalah sebagai transmitter antara android dengan arduino, dimana apabila android mengirimkan input maka arduino akan menerimanya melalui bluetooth dan mengirim perintah ke motor servo untuk membuka atau menutup gerbang.
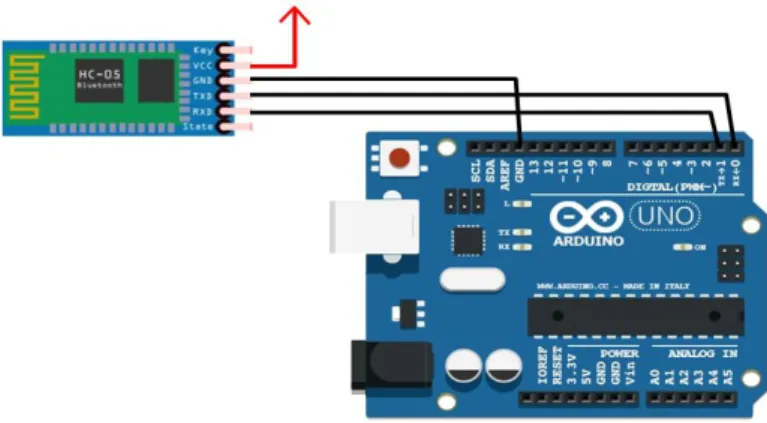
Gambar 3.3 Hubungan arduino dengan Bluetooth Keterangan:
1. Kaki TX pada Bluetooth dihubungkan dengan pin RX pada Arduino 2. Kaki RX pada Bluetooth dihubungkan dengan pin TX pada Arduino 3. Kaki VCC pada Bluetooth dihubungkan dengan pin VCC pada Arduino 4. Kaki GND pada Bluetooth dihubungkan dengan pin GND pada Arduino
3.4.3. Rangkaian Bagian Output 3.4.3.1. Rangkain Motor Servo
Pada gerbang control android ini penggunaan motor servo dimaksudkan untuk membantu menggerakan gerbang baik untuk membuka maupun menutup-
Gerbang, dimana kendali untuk menggerakkan gerbang terdapat pada android.
Gambar 3.4. Hubungan motor servo dengan arduino Keterangan:
1. Kaki input pada Servo dihubungkan pada pin D10 pada arduino 2. Kaki VCC pada Servo dihubungkan ke pin VCC pada arduino 3. Kaki GND pada Servo dihubungkan ke pin GND arduino
3.4.3.2. Rangkain LCD 16x2
Pada gerbang dengan control android ini penggunaan LCD adalah untuk menampilkan status dari alat itu sendiri hubungan antara LCD dengan
mikrokontroler arduino dapat dilihat pada gambar berikut ini.
Ketrangan :
1. Pin RS pada LCD duhubungkan ke pin D12 pada arduino 2. Pin Enable pada LCD duhubungkan ke pin D11 pada arduino 3. Pin D4 pada LCD duhubungkan ke pin D5 pada arduino 4. Pin D5 pada LCD duhubungkan ke pin D4 pada arduino 5. Pin D6 pada LCD duhubungkan ke pin D3 pada arduino 6. Pin D7 pada LCD duhubungkan ke pin D2 pada arduino 7. Pin R/W pada LCD duhubungkan ke pin GND pada arduino 8. Pin VSS pada LCD duhubungkan ke pin GND pada arduino 9. Pin VCC pada LCD duhubungkan ke pin 5V pada arduino
3.4.3.3. Rangkain Buzzer
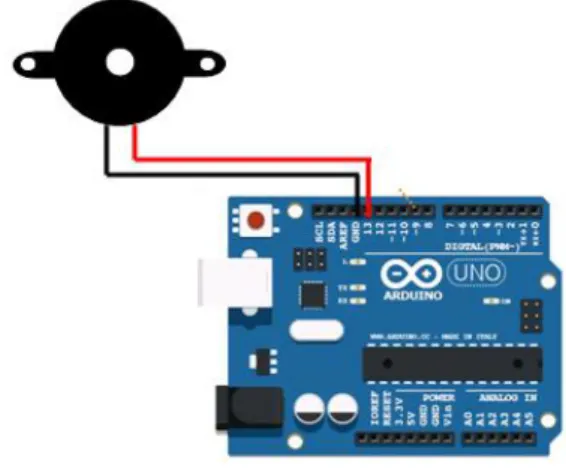
Buzzer pada gerbang dengan control android ini digunakan sebagai indicator bunyi yang berfungsi sebagai paringatan saat gerbang akan dibuka maupun ditutup. Gambar rangkaian dari buzzer dapat dilihat pada gambar berikut.
Gambar 3.6. Hubungan Buzzer dengan arduino
Keterangan :
1. Kaki VCC padauzzer dihubungkan ke pin D13 pada arduino 2. Kaki GND pada Buzzer dihubungkan ke pin GND arduino
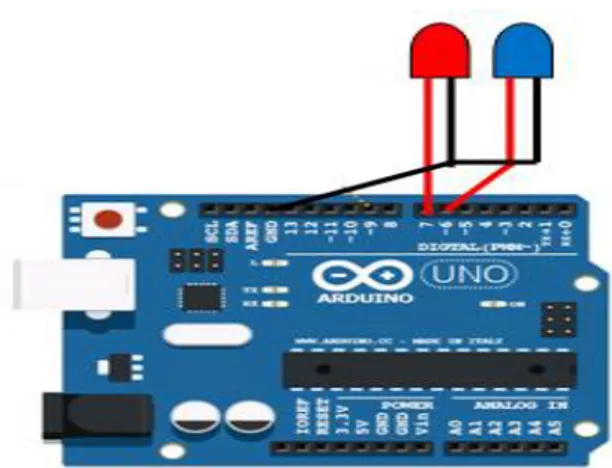
3.4.3.4. Rangkain LED
Pada gerbang dengan menggunakan control android ini terdapat dua buah LED (biru dan merah), LED ini digunakan sebagai indicator saat gerbang dibuka dan ditutup. Dimana LED biru akan hidup saat gerbang dibuka dan dan LED merah akan aktif disaat gerbang ditutup. Untuk rangkaian hubungan antara LED dan Arduino dapat kita lihat pada gambar dibawah ini.
Gambar 3.7. Hubungan LED dengan arduino Keterangan :
1. Kaki VCC pada LED Merah dihubungkan ke pin D7 pada arduino 2. Kaki VCC pada LED Biru dihubungkan ke pin D6 pada arduino 3. Kaki GND pada LED dihubungkan ke pin GND arduino
3.5. Software Pemrograman dan Program Gerbang Kontrol Android 3.5.1. Software Arduino.cc 1.6.7
Bahasa C merupakan salah satu bahasa yang cukup popular dan handal untuk pemrograman mikrokontroler. Dalam melakukan pemrograman mikrokontroler diperlukan suatu software pemrograman, salah satunya yang mendukung bahasa c adalah Arduino.cc. Software Arduino.cc hanya digunakan untuk mikrokontroler keluarga arduino saja.
Gambar 3.8 Software Arduino.cc 3.5.2. Program Gerbang Dengan Kontrol Android
Persiapan pertama sebelum memasukkan program adalah menghubungkan mikrokontroler arduino dengan PC melalui USB port. Langkah berikutnya adalah membuka sotware arduino.cc, langkah selanjutnya adalah penulisan program pada software, berikut ini adalah program yang di tuliskan pada software.
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
#include <Servo.h>
Servo myservo;
int ledbiru = 6;
int ledmerah = 7;
int state = 0;
int flag = 0;
int buzzer = 13;
void setup() { Serial.begin(9600);
pinMode(ledbiru, OUTPUT);
pinMode(ledmerah, OUTPUT);
pinMode(buzzer, OUTPUT);
lcd.begin(16,2);
myservo.attach(10);
lcd.setCursor(0,0);
lcd.print(" BT Control ");
}
void loop() {
if (Serial.available() > 0){
state = Serial.read();
flag=0;
}
if (state=='0'){
if(flag==0){
digitalWrite(ledmerah,HIGH);
digitalWrite(buzzer,LOW);
Serial.println("LED: OFF");
lcd.setCursor(0, 1);
lcd.print("GERBANG TERTUTUP");
myservo.write(90);
flag=1;
} }
else if (state=='1'){
digitalWrite(buzzer,HIGH);
delay(300);
digitalWrite(buzzer,LOW);
delay(200);
if (flag ==0){
myservo.write(180);
digitalWrite(ledbiru,HIGH);
digitalWrite(ledmerah,LOW);
Serial.println("LED: ON");
lcd.setCursor(0, 1);
lcd.print("MEMBUKA GERBANG");
flag = 1;
} } }
Gambar 3.9 Penulisan program pada software arduino.cc
Setelah pengetikan program selesai langkah selajutnya adalah compile program untuk mengubah bahasa pemrograman (code program) menjadi bahasa mesin (kode biner) dan memastikan apakah terdapat error atau warning pada program. Jika tidak terjadi error maka upload program berhasil.
Gambar 3.10 Tampilan saat proses compile dan upload
3.6. Perakitan
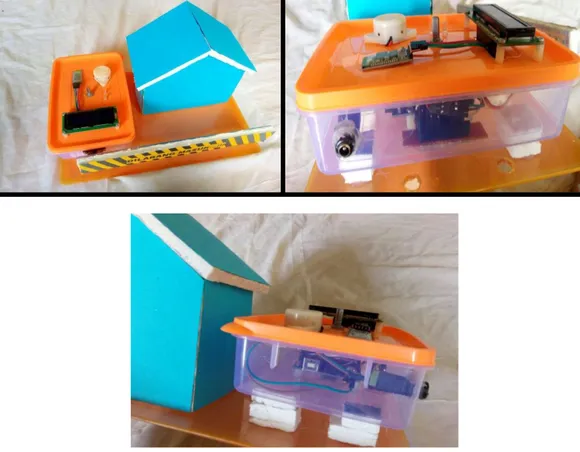
Setiap bagian pada alat memiliki metode yang berbeda dalam perakitannya, hal ini disebabbkan beberapa faktor seperti berat, penempatan, ukuran, fungsi dan lain - lain. Pada pembuatan prototype gerbang dengan control android ini proses perakitan dilakukan sedemikian rupa dengan memperhatikan penempatan komponen – komponen yang digunakan sehingga akan membentuk sebuah prototype rumah yang dilengkapi dengan gerbang.
Untuk menghubungkan anatar komponen yang terdapat pada alat digunakan kabel jumper. Agar pengakabelan tidak terlihat acak – acakan kabel dirapikan dengan menggunakan kabel ties untuk menyatukan dan mengikat beberapa komponen alat yang diperlukan. Untuk lebih jelas hasil perancangan dapat kita lihat pada gambar dibawah.
Gambar 3.11 Prototype Gerbang Dengan Kontrol Android
3.7. Flowchart Sistem Kerja Gerbang dengan Kontrol Android
Gambar 3.12 Flowchart Sistem Kerja Gerbang dengan Kontrol Android Ada Perintah ?
Selesai Mulai
Input Data
Tidak ada masukan
ya
Turn Off Mengisi data
Gerbang terbuka
Gerbang tertutup Turn On
Berdasakan Flowchat di atas dapat kita ketahui bagaiman proses kerja dari alat yaitu alat akan terlebih dahulu di aktifkan apabila tidak ada perintah yang kita berikan, maka alat akan tetap aktif dimana kondisi gerbang berada di kondisi tertutup dan pada LCD akan ditampilkan tulisan “BT Control”.
Apabila ada data yang kita masukkan yaitu data yang kita kirim dari android misalnya data yang kita masukkan adalah Turn on yang dilakukan dengan cara menekan icon turn on pada android maka gerbang akan terbuka di ikuti dengan menyalanhya LED berwarna biru dan buzzer akan aktif diikuti dengan LCD yang akan menampilkan tuisan “Membuka gerbang”.
Apabila data yang kita masukkan adalah turn on yang dilakukan dengan cara menekan icon turn pada android maka gerbang akan tertutup dan akan tetap dalam kondisi tertutup sampai ada perintah lain yang diberikan.
BAB IV
PENGUJIAN DAN HASIL
4.1. Pengujian Rangkaian Sumber Tegangan (Baterai)
Untuk supply tegangan alat digunakan adaptor dengan tegangan 12 V yang dihubungkan langsung dengan arduino. Pada pengujian yang telah dilakukan didapatkan hasil bahwa bekerja dengan baik begitu juga dengan komponen lainnya. Hanya saja jika digunakan terlalu lama arduino akan cepat panas dikarenakan tegangan masukan dari adaptor yang cukup besar.
4.2. Pengujian Rangkaian Mikrokontroler Arduino Uno R3
Pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program Arduino.cc.
Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu Arduino Genuino/Uno.
Gambar 4.1. Informasi Signature Mikrokontroler Arduino Uno R3
Apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler Arduino Uno R3 bekerja dengan
4.3. Pengujian Bluetooth dengan Android, Motor Servo dan LED
Bagian ini dilakukan uji coba pengendalain gerbang dengan android proses pengujan dilakukan dengan pengamatan saat gerbang dikendalikan dengan Android. Berdasarkan pengamatan didapat data sebagai berikut.
Tabel 4.1 Data Pengujian Bluetooth dengan Android (Kendali)
Tombol pada Android Hasil
Gerbang terbuka dan lampu Biru Menyala
Gerbang tertutup dan lampu Merah Menyala
Berdasarkan keterangan di atas adapun program yang diisikan ke mikrokontroller untuk Kontrol adalah sebagai berikut:
void loop() {
if (Serial.available() > 0){
state = Serial.read();
flag=0;
}
if (state=='0'){
if(flag==0){
digitalWrite(ledbiru, LOW);
digitalWrite(ledmerah,HIGH);
digitalWrite(buzzer,LOW);
Serial.println("LED: OFF");
lcd.setCursor(0, 1);
lcd.print("GERBANG TERTUTUP");
myservo.write(90);
flag=1;
} }
else if (state=='1'){
digitalWrite(buzzer,HIGH);
delay(300);
digitalWrite(buzzer,LOW);
delay(200);
if (flag ==0){
myservo.write(180);
digitalWrite(ledbiru,HIGH);
digitalWrite(ledmerah,LOW);
Serial.println("LED: ON");
lcd.setCursor(0, 1);
flag = 1;
} } }
Program di atas adalah konfigurasi tombol pada Android yang dikirim menggunakan transmitter Bluetooth Hc-05. Pada alat dalam penelitian ini, Saat keseluruhan rangkaian diaktifkan.
4.4. Pengujian Bluetooth dengan Android (Jangkaun Jarak)
Bagian ini dilakukan uji coba untuk mengetahui jarak jangkauan Bluetooth HC-05 dengan android, proses pengujian dilakukan dengan mengamati pergerakan dan respon Motor Servo saat alat dikendalikan dengan Android . Berdasarkan pengamatan di dapat data sebagai berikut.
Tabel 4.2 Pengujian Bluetooth dengan Android (Jangkaun Jarak)
Jarak ( Meter) Status
5 Berhasil/respon cepat
7 Berhasil/respon cepat
8 Berhasil/respon cepat
9 Berhasil/respon cepat
10 Berhasil/respon cepat
11 Lost connection (jarak maksimal)
4.5. Pengujian LCD
Pengujian LCD dilakukan untuk mengetahui apakah LCD bekerja dengan baik atau tidak. Dimana LCD akan menampilkan status dari alat pada saat alat dihidupkan dan saat dikontrol dengan android. Pengujian ini bertujuan, baik atau tidaknya LCD untuk di gunakan, berikut adalah data LCD ketika alat sedang dijalankan.
Tabel 4.3 Pengujian LCD
Data Pengujian Hasil
Saat alat dihidupkan (Start)
Lcd menampilkan “BT Control”
Saat gerbang dibuka
Lcd menampilkan
“Membuka Gerbang”
Saat gerbang tertutup
Lcd menampilkan
“Gerbang Tertutup”
Berdasarkan keterangan di atas adapun program yang diisikan ke mikrokontroller untuk LCD adalah sebagai berikut:
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
void setup() { Serial.begin(9600);
pinMode(ledbiru, OUTPUT);
pinMode(buzzer, OUTPUT);
lcd.begin(16,2);
lcd.print(" BT Control ");
}
digitalWrite(ledbiru, LOW);
digitalWrite(ledmerah,HIGH);
digitalWrite(buzzer,LOW);
Serial.println("LED: OFF");
lcd.setCursor(0, 1);
lcd.print("GERBANG TERTUTUP");
myservo.write(90);
flag=1;
else if (state=='1'){
digitalWrite(buzzer,HIGH);
delay(300);
digitalWrite(buzzer,LOW);
delay(200);
if (flag ==0){
myservo.write(180);
digitalWrite(ledbiru,HIGH);
digitalWrite(ledmerah,LOW);
Serial.println("LED: ON");
lcd.setCursor(0, 1);
lcd.print("MEMBUKA GERBANG");
BAB V PENUTUP
5.1. Kesimpulan
Dari perancangan dan pengujian Gerbang dengan control Android dapat diambil beberapa kesimpulan sebagai berikut:
1. Telah dirancang sebuah Gerbang dengan control android dengan menggunakan motor servo sebagai output/penggerak gerbang dan arduino uno R3 sebagai mikrokontrolernya.
2. Dari hasil perancangan diketahui bahwa gerbang menggunakan motor servo sebagai penggerak yang di control melalui android. Gerbang akan dapat dibuka dan ditutup apa bila pemilik (user) membuka atau menutupnya malalui android.
3. Setelah dilakukan pengujian gerbang bekerja dengan baik dalam membuka maupun menutup sesuai dengan perancangan yang telah dibuat.
5.2. Saran
Dari hasil Proyek ini masih terdapat beberapa kekurangan dan dimungkinkan untuk pengembangan lebih lanjut. Oleh karenanya penulis merasa perlu untuk memberi saran sebagai berikut.
1. Gerbang akan menjadi lebih efektif apabila menggunakan motor-lebih besar.
2. Gerbang akan bekerja lebih efektif jika memiliki jangkauan yang lebih
3. Penambahan fitur seperti kamera akan membuat kinerja dari gerbang menjadi lebih efektif sehngga memungkinkan kita untuk mengetahui lokosi ataupun objek yang berada disekitar gerbang.
DAFTAR PUSTAKA
Budiharto, Widodo. 2005. Panduan Lengkap Belajar Mikrokontroler dan Aplikasi Mikrokontroler. PT Elex Media Komputindo. Jakarta
Budiharto, Widodo. 2010. Elektronik Digital dan Mikroprosesor. Andi:
Yogyakarta
Hermawan S, Stephanus. 2011. Mudah Membuat Apliklasi Android. Andi : Yogyakarta.
http://saptaji.com/2016/08/11/menangani-sensor-api-flame-detector-dengan- arduino/
Irawan. 2012. Membuat Aplikasi Android Untuk Orang Awam. Maxikom : Palembang.
Djuandi, F. 2011. Pengenalan Arduino.http://www.tobuku.com ]
http://belajar-dasar-pemrograman.blogspot.co.id/2013/03/arduino-uno.html https://elektronika-dasar.web.id/lcd-liquid-cristal-display/