4.1
Pengumpulan Data
4.1.1
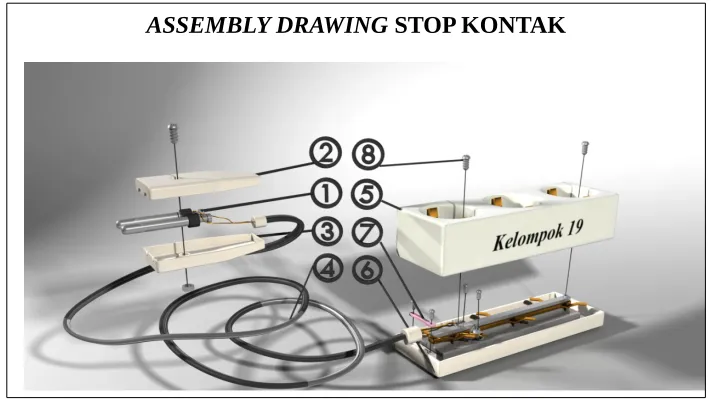
Assembly Drawing
Stop Kontak
Berikut ini adalah gambar
assembly drawing
stop kontak yang dapat dilihat
sebagai berikut:
Gambar 4.1 Assembly Drawing Stop kontak
Keterangan:
1. Fitting
2.
Kepala steker
1
3. Kepala steker
1
4.
Kabel
5.
Badan Atas Stop kontak
6.
Badan Bawah Stop kontak
7.
Penjepit
8.
Baut+Mur
4.1.2
Layout
Meja Perakitan
a.
Layout
Meja Perakitan 1
Berikut ini merupakan
Layout
1
meja perakitan pada perakitan stop kontak
sebagai berikut:
Gambar 4.2 Layout Meja Perakitan 1
paling kiri kemudian ke kanan sesuai dengan urutan dari
layout
yang telah
dibuat.
b.
Layout
Meja Perakitan 2
Berikut ini merupakan
Layout
2
meja perakitan pada perakitan stop kontak
sebagai berikut:
Gambar 4.3 Layout Meja Perakitan 2
yang akan dirakit. Dan proses perakitannya dimulai dari paling kiri kemudian ke
kanan sesuai dengan urutan dari
layout
yang telah dibuat.
4.1.3 Data Waktu Perakitan
Berikut ini merupakan data waktu perakitan yang didapatkan dari perakitan
stop kontak:
Tabel 4.1 Data Waktu Perakitan
No. Waktu SIklus
1 6,32
2 5,49
3 5,18
4 6,32
5 5,32
6 6,05
7 5,46
8 5,49
9 6,59
10 5,25
11 5,31
12 5,04
13 5,07
14 5,,09
15 5,11
16 5,01
17 4,59
18 5,31
19 6,18
20 6,22
21 5,58
22 6,56
23 6,37
24 5,46
25 6,58
26 4,69
27 4,56
28 5,28
29 6,05
4.2
Pengolahan Data
4.2.1 Peta Kerja Keseluruhan
4.2.1.1
Assembly Chart
Adapun
assembly chart
ini terbagi menjadi 2 bagian:
a.
Assembly Chart Layout
1
Berikut merupakan
Assembly Chart
pada proses perakitan stop kontak
layout
1
Dari gambar
assembly chart layout
1 proses urutan perakitannya sesuai
dengan
layout
yang telah dibuat pada gambar
layout
1 meja kerja perakitan.
Kemudian komponen-komponennya dirakit sesuai dengan urutan perakitan
tersebut.
b.
Assembly Chart Layout
2
Berikut merupakan
Assembly Chart
pada proses perakitan stop kontak
layout
2:
Gambar 4.5 Assembly Chart Layout 2
Kemudian komponen-komponennya dirakit sesuai dengan urutan perakitan
tersebut.
4.2.2 Peta Kerja Setempat
Adapun bagian-bagian pada peta kerja setempat sebagai berikut:
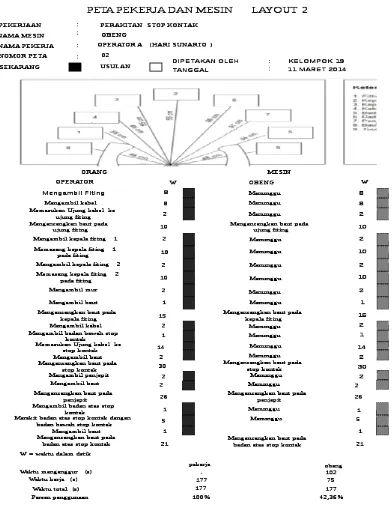
4.2.2.1 Peta Pekerja dan Mesin
a. Pet
a
Pekerja dan Mesin
Layout
1
Gambar 4.6 Peta Pekerja dan Mesin Layout 1
b. Pet
a
Pekerja dan Mesin
Layout
2
Gambar 4.7 Peta Pekerja dan Mesin Layout 2
gambar diatas kita dapat mengetahui kapan operator menggunakan alat bantu atau
mesin untuk melakukan proses perakitan tersebut.
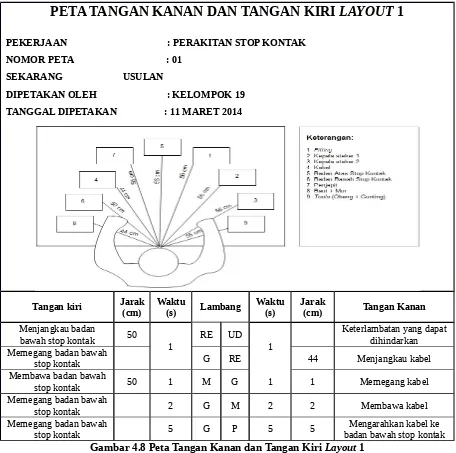
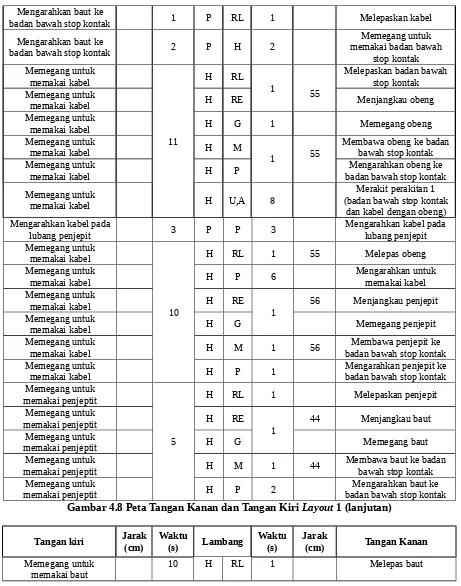
4.2.2.2 Peta Tangan Kanan dan Tangan Kiri
Berikut merupakan peta tangan kanan dan tangan kiri pada proses
perakitan stop kontak
layout
1:
PETA TANGAN KANAN DAN TANGAN KIRI
LAYOUT
1
PEKERJAAN : PERAKITAN STOP KONTAK NOMOR PETA : 01
SEKARANG USULAN
DIPETAKAN OLEH : KELOMPOK 19 TANGGAL DIPETAKAN : 11 MARET 2014
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Menjangkau badan
bawah stop kontak 50 1 RE UD 1
Keterlambatan yang dapat dihindarkan Memegang badan bawah
stop kontak G RE 44 Menjangkau kabel
Membawa badan bawah
stop kontak 50 1 M G 1 1 Memegang kabel
Memegang badan bawah
stop kontak 2 G M 2 2 Membawa kabel
Memegang badan bawah
stop kontak 5 G P 5 5 badan bawah stop kontakMengarahkan kabel ke Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1
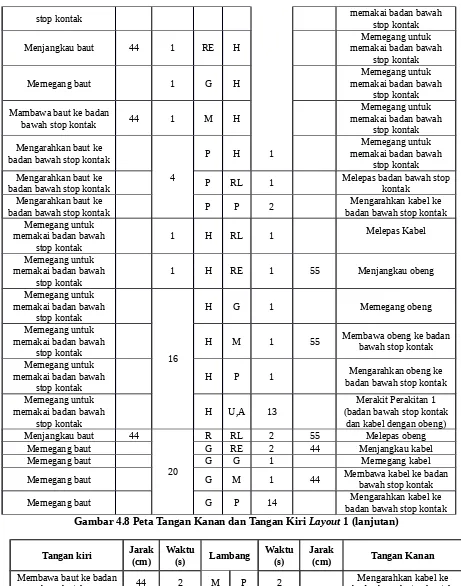
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Memegang badan bawah
stop kontak 3 G RL 3 Melepas kabel
stop kontak memakai badan bawahstop kontak
Menjangkau baut 44 1 RE H memakai badan bawahMemegang untuk stop kontak Memegang baut 1 G H memakai badan bawahMemegang untuk
stop kontak Mambawa baut ke badan
bawah stop kontak 44 1 M H
Memegang untuk memakai badan bawah
stop kontak Mengarahkan baut ke
badan bawah stop kontak
4
P H 1 memakai badan bawahMemegang untuk stop kontak Mengarahkan baut ke
badan bawah stop kontak P RL 1 Melepas badan bawah stopkontak Mengarahkan baut ke
badan bawah stop kontak P P 2
Mengarahkan kabel ke badan bawah stop kontak Memegang untuk
memakai badan bawah
stop kontak 1 H RL 1
Melepas Kabel
Memegang untuk memakai badan bawah
stop kontak 1 H RE 1 55 Menjangkau obeng
Memegang untuk memakai badan bawah
stop kontak
16
H G 1 Memegang obeng
Memegang untuk memakai badan bawah
stop kontak H M 1 55
Membawa obeng ke badan bawah stop kontak Memegang untuk
memakai badan bawah
stop kontak H P 1
Mengarahkan obeng ke badan bawah stop kontak Memegang untuk
memakai badan bawah
stop kontak H U,A 13
Merakit Perakitan 1 (badan bawah stop kontak
dan kabel dengan obeng) Menjangkau baut 44
20
R RL 2 55 Melepas obeng
Memegang baut G RE 2 44 Menjangkau kabel
Memegang baut G G 1 Memegang kabel
Memegang baut G M 1 44 Membawa kabel ke badanbawah stop kontak Memegang baut G P 14 badan bawah stop kontakMengarahkan kabel ke
Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Membawa baut ke badan
Mengarahkan baut ke
badan bawah stop kontak 1 P RL 1 Melepaskan kabel
Mengarahkan baut ke
badan bawah stop kontak 2 P H 2
Memegang untuk memakai badan bawah
stop kontak Memegang untuk
memakai kabel
11
H RL
1 55
Melepaskan badan bawah stop kontak Memegang untuk
memakai kabel H RE Menjangkau obeng
Memegang untuk
memakai kabel H G 1 Memegang obeng
Memegang untuk
memakai kabel H M 1 55
Membawa obeng ke badan bawah stop kontak Memegang untuk
memakai kabel H P
Mengarahkan obeng ke badan bawah stop kontak Memegang untuk
memakai kabel H U,A 8
Merakit perakitan 1 (badan bawah stop kontak
dan kabel dengan obeng) Mengarahkan kabel pada
lubang penjepit 3 P P 3
Mengarahkan kabel pada lubang penjepit Memegang untuk
memakai kabel
10
H RL 1 55 Melepas obeng
Memegang untuk
memakai kabel H P 6 Mengarahkan untukmemakai kabel Memegang untuk
memakai kabel H RE 1 56 Menjangkau penjepit
Memegang untuk
memakai kabel H G Memegang penjepit
Memegang untuk
memakai kabel H M 1 56
Membawa penjepit ke badan bawah stop kontak Memegang untuk
memakai kabel H P 1 Mengarahkan penjepit kebadan bawah stop kontak Memegang untuk
memakai penjeptit
5
H RL 1 Melepaskan penjepit
Memegang untuk
memakai penjeptit H RE 1 44 Menjangkau baut
Memegang untuk
memakai penjeptit H G Memegang baut
Memegang untuk
memakai penjeptit H M 1 44
Membawa baut ke badan bawah stop kontak Memegang untuk
memakai penjeptit H P 2 badan bawah stop kontakMengarahkan baut ke Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Memegang untuk
Memegang untuk
memakai baut H RE 55 Menjangkau obeng
Memegang untuk
memakai baut H G 1 Memegang obeng
Memegang untuk
memakai baut H M 55
Membawa obeng ke badan bawah stop kontak Memegang untuk
memakai baut H P 1 badan bawah stop kontakMengarahkan obeng ke Memegang untuk
memakai baut H U,A 6
Merakit perakitan 2 (perakitan 1 dan penjepit
dengan obeng) Memegang untuk
memakai baut H RL 1 55 Melepaskan obeng
Menjangkau baut 44 1 RE H 1 Memegang untukmemakai penjepit
Memegang baut 1 G H
2
Memegang untuk memakai penjepit Mambawa baut ke badan
bawah stop kontak 44 1 M H Memegang untukmemakai penjepit Memegang untuk
memakai baut 1 H RL 1 Melepas penjepit
Memegang untuk memakai baut
1
H RE
1
55 Menjangkau obeng Memegang untuk
memakai baut H G Memegang obeng
Memegang untuk
memakai baut H M 55 Membawa obeng ke badanbawah stop kontak Memegang untuk
memakai baut 1 H P 1 badan bawah stop kontakMengarahkan obeng ke Memegang untuk
memakai baut
5
H U,A 4
Merakit perakitan 2 (perakitan 1 dan penjepit
dengan obeng) Memegang untuk
memakai perakitan 2 H RL 1 55 Melepas obeng
Memegang untuk memakai perakitan 2
5
H RE
1
56 Menjangkau badan atasstop kontak Memegang untuk
memakai perakitan 2 H G Memegang badan atas stopkontak Memegang untuk
memakai perakitan 2 H M 1 56
Membawa badan atas stop kontak
Memegang untuk
memakai perakitan 2 H P 3 Mengarahkan badan atasstop kontak Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
memakai perakitan 2 Memegang baut G H memakai perakitan 2Memegang untuk Mambawa baut ke badan
bawah stop kontak 44 1 M H
3
Memegang untuk memakai perakitan 2 Mengarahkan baut ke
badan bawah stop kontak 2 P H
Memegang untuk memakai perakitan 2 Melepaskan baut RL H memakai perakitan 2Memegang untuk Menjangkau baut 44
1
RE H
1
Memegang untuk memakai perakitan 2 Memegang baut G H memakai perakitan 2Memegang untuk Mambawa baut ke badan
bawah stop kontak 44 1 M H 4 memakai perakitan 2Memegang untuk Mengarahkan baut ke
badan bawah stop kontak 3 P H
Memegang untuk memakai perakitan 2 Memegang untuk
memakai perakitan 2
7
H RL
1 55 Melepas perakitan 2 Memegang untuk
memakai perakitan 2 H RE Menjangkau obeng
Memegang untuk
memakai perakitan 2 H G 1
55
Memegang obeng Memegang untuk
memakai perakitan 2 H M badan atas stop kontakMembawa obeng ke Memegang untuk
memakai perakitan 2 H P 1
Mengarahkan obeng ke badan atas stop kontak Memegang untuk
memakai perakitan 2 H U,A 4
Merakit perakitan 3 (perakitan 2 dan badan atas stop kontak dengan
obeng) Memegang untuk
memakai perakitan 2
9
H U,A 7
Merakit perakitan 3 (perakitan 2 dan badan atas stop kontak dengan
obeng)
Menjangkau kabel 44 RE RL 1 55 Melepas obeng
Memegang kabel G RE 1 44 Menjangkau kabel
Membawa kabel 44 3 M G 3 Memegang kabel
Mengarahkan kabel 1 P M 1 44 Membawa kabel
Memegang untuk
memakai kabel 2 H P 2 Mengarahkan kabel
Memegang untuk
memakai kabel 1 H RE 1 56 Menjangkau Fitting
Memegang untuk
memakai kabel H G Memegang Fitting
Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1 (lanjutan)
Memegang untuk memakai kabel
7
H M 1 56 Membawa Fitting
Memegang untuk
memakai kabel H P 4 Mengarahkan kabelFitting ke
Memegang untuk
memakai kabel H RL 1
55
Melepas kabel Memegang untuk
memakai kabel H RE Menjangkau obeng
Memegang untuk
memakai kabel H G 1 Memegang obeng
Memegang untuk memakai Fitting
8
H M 1 55 Membawa obeng keFitting Memegang untuk
memakai Fitting H P 1 Mengarahkan obeng keFitting
Memegang untuk
memakai Fitting H U,A 6
Merakit perakitan 4 (perakitan 3 dan Fitting
dengan obeng) Memegang untuk
memakai perakitan 4
16
H RL 1 55 Melepas obeng
Memegang untuk
memakai perakitan 4 H P 5
Mengarahkan kabel ke
Fitting
Memegang untuk
memakai perakitan 4 H RE 1 55 Menjangkau obeng
Memegang untuk
memakai perakitan 4 H G Memegang obeng
Memegang untuk
memakai perakitan 4 H M 1 55 Membawa obeng keFitting
Memegang untuk
memakai perakitan 4 H P Mengarahkan obeng keFitting
Memegang untuk
memakai perakitan 4 H U,A 8
Merakit perakitan 4 (perakitan 3 dan Fitting
dengan obeng) Memegang untuk
memakai perakitan 4
11
H RL 1 55 Melepas obeng
Memegang untuk
memakai perakitan 4 H RE
1 5656
Menjangkau kepala steker 1 Memegang untuk
memakai perakitan 4 H G
Memegang kepala steker 1 Memegang untuk
memakai perakitan 4 H M Membawa 1 ke perakitan 4kepala steker Memegang untuk
memakai perakitan 4 H P 1 stekerMengarahkan 1 ke perakitan 4kepala Memegang untuk
memakai perakitan 4 H U 8
Merakit perakitan 5 (perakitan 4 dengan
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Memegang untuk
memakai perakitan 5 1 H RL 1 Melepas perakitan 5
Memegang untuk
memakai perakitan 5 H P Mengarahkan kabel
Memegang untuk memakai perakitan 5
7
H RL
1
56 Melepas kabel Memegang untuk
memakai perakitan 5 H RE
Menjangkau kepala steker 2 Memegang untuk
memakai perakitan 5 H G Memegang steker 2kepala
Memegang untuk
memakai perakitan 5 H M 1 56
Membawa kepala steker
2 ke kepala steker1 Memegang untuk
memakai perakitan 5 H P 4
Mengarahkan kepala steker 2 ke kepala
steker1 Memegang untuk
memakai perakitan 5 H H 1
Memegang untuk memakai perakitan 5 Menjangkau mur 44
1
RE H
1
Memegang untuk memakai perakitan 5 Memegang mur G H memakai perakitan 5Memegang untuk Membawa mur ke
perakitan 5 44 1 M H 1 memakai perakitan 5Memegang untuk Mengarahkan mur ke
perakitan 5 P H memakai perakitan 5Memegang untuk Memegang untuk
memakai perakitan 5
6
H RE 1 44 Menjangkau baut
Memegang untuk
memakai perakitan 5 H G 1 44 Memegang baut
Memegang untuk
memakai perakitan 5 H M Membawa baut keperakitan
Memegang untuk memakai perakitan 5
H P 4 Mengarahkan baut keperakitan Memegang untuk
memakai perakitan 5
7
H RE
1
55 Menjangkau obeng Memegang untuk
memakai perakitan 5 H G Memegang obeng
Memegang untuk
memakai perakitan 5 H M 1
55 Membawa obeng ke perakitan Memegang untuk
memakai perakitan 5 H P Mengarahkan obeng keperakitan Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1 (lanjutan)
Memegang untuk
memakai perakitan 5 H U,A 5
Merakit perakitan 6 (perakitan 5 dan kepala
steker 2 dengan obeng)
Melepas perakitan 6 1 RL RL 1 55 Melepas obeng
TOTAL 716 216 216 2320
Gambar 4.8 Peta Tangan Kanan dan Tangan Kiri Layout 1 (lanjutan)
Dari gambar peta tangan kanan dan tangan kiri pada
layout
1 diatas dapat
dilihat bahwa peta tersebut menggambarkaan seluruh elemen-elemen gerakan pada
saat bekerja dan waktu menganggur yang dilakukan oleh tangan kiri dan tangan
kanan. Selain itu, peta tangan kiri dan tangan kanan juga menunjukkan perbandingan
antara tugas yang dibebankan pada tangan kiri dan tangan kanan ketika melakukan
pekerjaan.
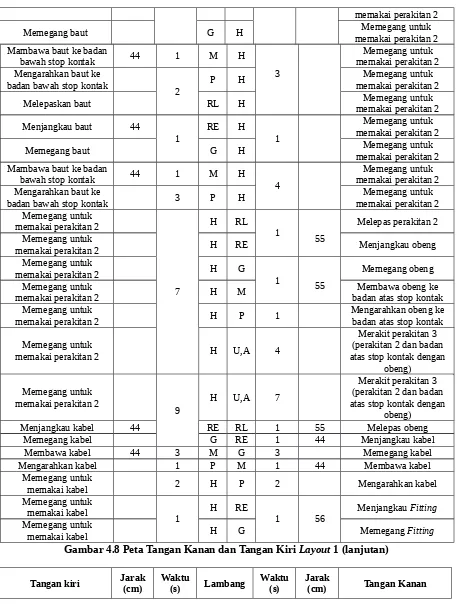
Berikut merupakan peta tangan kanan dan tangan kiri pada proses
perakitan stop kontak
layout
2:
PETA TANGAN KANAN DAN TANGAN KIRI
LAYOUT
2
PEKERJAAN : PERAKITAN STOP KONTAK NOMOR PETA : 02
SEKARANG USULAN
DIPETAKAN OLEH : KELOMPOK 19 TANGGAL DIPETAKAN : 11 MARET 2014
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Menjangkau Fitting 50 1 RE RE 1 46 Menjangkau kabel
Memegang Fitting G G Memegang kabel
Membawa Fitting ke
kabel 1 50 1 M M 1 46 Membawa ujungkabel ke Fitting
Mengarahkan Fitting
ke kabel 1 1 P P 1
Mengarahkan ujung kabel ke Fitting
Memegang Fitting
2
G RE
1 48 Menjangkau obeng
Memegang Fitting G G Memegang kabel
Memegang Fitting G M 1 48 Membawa obeng keFitting Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
ke Fitting
Memegang Fitting G U,A 5 Merakit perakitan 1(Fitting dan kabel dengan obeng)
Memegang Fitting G RL 1 48 Melepaskan obeng
Memegang Fitting G RE 1 46 Menjangkau kabel
Memegang Fitting G G 1 Memegang kabel
Memegang Fitting G M 1 46 Membawa kabel keFitting Memegang Fitting G P 3 Mengarahkan kabelke Fitting
Memegang Fitting G RE 1 48 Menjangkau obeng
Memegang Fitting G G Memegang obeng
Memegang Fitting G M 1 48 Membawa obeng keFitting Memegang Fitting G P 2 Mengarahkan obengke Fitting
Memegang Fitting G U,A 6 Merakit perakitan 1(Fitting dan kabel dengan obeng)
Memegang perakitan 1 1 G RL 1 48 Melepaskan obeng
Memegang untuk
memakai perakitan 1 1 H G 1 Memegang kabel
Memegang untuk
memakai perakitan 1 1 H RE 1 55 Menjangkau steker 2kepala Memegang untuk
memakai perakitan 1 1 H RE 1 55
Menjangkau kepala steker 2 Memegang untuk
memakai perakitan 1 1 H RE 1 55 Menjangkau steker 2kepala Memegang untuk
memakai perakitan 1
7
H RE
1 5555
Menjangkau kepala steker 2
Memegang untuk
memakai perakitan 1 H G
Memegang kepala steker 2 Memegang untuk
memakai perakitan 1 H M Membawa steker 2 ke Fittingkepala
Memegang untuk
memakai perakitan 1 H U 6
Merakit perakitan 2 (perakitan 1 dan
kepala steker 2) Memegang untuk
memakai perakitan 2 1 H RE 1 50
Menjangkau kepala steker 1 Memegang untuk
memakai perakitan 2 H G
Memegang kepala steker 1 Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Memegang untuk
Memegang untuk
memakai perakitan 2 H P 3
Mengarahkan
kepala steker 1 ke perakitan 2 Menjangkau mur 48
1
RE H 1
Memegang untuk memakai perakitan
2
Memegang mur G H memakai perakitanMemegang untuk
2 Membawa mur ke
perakitan 48
1
M H 1 memakai perakitanMemegang untuk 2
Mengarahkan mur ke
perakitan P H
Memegang untuk memakai perakitan
2 Mengarahkan perakitan
2 4 P P 4
Mengarahkan perakitan 2 Memegang untuk
memakai perakitan 2
7
H RE 1 48 Menjangkau baut
Memegang untuk
memakai perakitan 2 H G Memegang baut
Memegang untuk
memakai perakitan 2 H M 1 48
Membawa baut ke perakitan Memegang untuk
memakai perakitan 2 H P 2 Mengarahkan bautke perakitan Memegang untuk
memakai perakitan 2 H RE 1 48 Menjangkau obeng
Memegang untuk
memakai perakitan 2 H G Memegang obeng
Memegang untuk
memakai perakitan 2 H M 1 48 Membawa obengke Fitting
Memegang untuk
memakai perakitan 2 H P 1
Mengarahkan obeng ke Fitting
Memegang untuk
memakai perakitan 2 9 H U,A 9 Merakit perakitan 3(perakitan 2 dan
kepala steker 2
Melepaskan perakitan 3 1 RL RL 1 48 Melepaskan obeng
Menjangkau kabel 46
1 RE RE 1 56
Menjangkau badan bawah stop kontak Memegang kabel G G bawah stop kontakMemegang badan
Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Membawa kabel ke badan bawah stop
kontak 46
1
M M 1 56 bawah stop kontakMembawa badan Mengarahkan kabel ke
badan bawah stop
P P Mengarahkan
kontak kontak ke kabel Memegang badan
bawah stop kontak 1 G G 1 Memegang kabel
Memegang untuk memakai badan bawah
stop kontak
6 H P 6 Mengarahkan kabelke badan bawah stop kontak
Menjangkau baut 48 1 RE H
1
Memegang untuk memakai kabel
Memegang baut G H Memegang untukmemakai kabel
Membawa baut ke badan bawah stop
kontak 48 1 M H 1
Memegang untuk memakai kabel Mengarahkan baut ke
badan bawah stop
kontak 4 P H 4
Memegang untuk memakai kabel Memegang untuk
memakai badan bawah stop kontak
16
H P 5 Mengarahkan bautke badan bawah stop kontak Memegang untuk
memakai badan bawah
stop kontak H RE 1
48 Menjangkau obeng
Memegang untuk memakai badan bawah
stop kontak H G Memegang obeng
Memegang untuk memakai badan bawah
stop kontak H M 1
48 Membawa obeng kebadan bawah stop kontak Memegang untuk
memakai badan bawah stop kontak
H P obeng ke badanMengarahkan bawah stop kontak Memegang untuk
memakai badan bawah stop kontak
H U,A 9 Merakit perakitan 4(perakitan 3 dan badan bawah stop Menjangkau baut 48
1 RE RL 1 48 Melepaskan obeng
Memegang baut G M Memegang kabel
Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Membawa baut ke badan bawah stop
kontak
48
1
M P
1
Mengarahkan kabel Mengarahkan baut ke
badan bawah stop
kontak P P Mengarahkan kabel
badan bawah stop
kontak bawah stop kontakmemakai badan
Memegang untuk memakai badan bawah
stop kontak
15
H P 4 Mengarahkan baut
Memegang untuk memakai badan bawah
stop kontak H RE 1
48 Menjangkau obeng
Memegang untuk memakai badan bawah
stop kontak H G Memegang obeng
Memegang untuk memakai badan bawah
stop kontak
H M 1 48 Membawa obeng kebadan bawah stop kontak Memegang untuk
memakai badan bawah stop kontak
H P 1 obeng ke badanMengarahkan bawah stop kontak Memegang untuk
memakai badan bawah stop kontak
H U,A 8
Merakit perakitan 4 (perakitan 3 dan badan bawah stop
kontak dengan obeng) Memegang untuk
memakai perakitan 4 1 H RL 1 48 Melepaskan obeng
Mengarahkan kabel ke
lubang penjepit 2 P G 2
Memegang untuk memakai perakitan
4 Memegang untuk
memakai kabel
1
H RE
1
51 Menjangkau penjepit Memegang untuk
memakai kabel H M
Membawa penjepit ke badan bawah
stop kontak Memegang untuk
memakai kabel 1 H P 1 51
Mengarahkan penjepit ke badan bawah stop kontak Menjangkau baut 48
1 RE H 1
Memegang untuk memakai kabel
Memegang baut G H Memegang untukmemakai kabel
Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Membawa baut ke badan bawah stop
kontak 48 1 M H 1
Memegang untuk memakai kabel Mengarahkan baut ke
badan bawah stop
kontak 1 P H 1
memegang untuk memakai penjepit
8
H RE
1
48 Menjangkau obeng memegang untuk
memakai penjepit H G Memegang obeng
memegang untuk
memakai penjepit H M 48
Membawa obeng ke
Fitting
memegang untuk
memakai penjepit H P 1 obeng ke MengarahkanFitting
memegang untuk
memakai penjepit H U,A 5
Merakit perakitan 5 (perakitan 4 dan penjepit dengan
obeng) memegang untuk
memakai penjepit H RL 1 48 melepaskan obeng
Mengarahkan perakitan
5 1 P P 1 Mengarahkanperakitan 5
Menjangkau baut 48
1
RE H
1
Memegang untuk memakai perakitan
5
Memegang baut G H memakai perakitanMemegang untuk
5 Membawa baut ke
badan bawah stop
kontak 48 1 M H 1
Memegang untuk memakai perakitan
5 Mengarahkan baut ke
badan bawah stop
kontak 1 P H 1
Memegang untuk memakai perakitan
5 Memegang untuk
memakai perakitan 5
9
H RE
1 48
Menjangkau obeng Memegang untuk
memakai perakitan 5 H G Memegang obeng
Memegang untuk
memakai perakitan 5 H M 1 48 Membawa obeng keFitting
Memegang untuk
memakai perakitan 5 H P 1 obeng ke MengarahkanFitting
Memegang untuk
memakai perakitan 5 H U,A 6
Merakit perakitan 5 (perakitan 4 dan penjepit dengan
obeng) Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Memegang untuk memakai perakitan 5
4 H RL 1 48 melepaskan obeng
Memegang untuk
memakai perakitan 5 H RE 1 54 Menjangkau badanatas stop kontak
memakai perakitan 5 atas stop kontak Memegang untuk
memakai perakitan 5 H M 1 54 Membawa badanatas stop kontak Memegang untuk
memakai perakitan 5 H P 1
Mengarahkan badan atas stop
kontak Memegang untuk
memakai perakitan 5
3
H RE
1
48 Menjangkau baut Memegang untuk
memakai perakitan 5 H G Memegang baut
Memegang untuk
memakai perakitan 5 H M 1 48 Membawa baut keperakitan 5 Memegang untuk
memakai perakitan 5 H P 1 Mengarahkan bautke perakitan 5 Menjangkau baut 48
1
RE H
1
Memegang untuk memakai perakitan
5
Memegang baut G H memakai perakitanMemegang untuk
5 Membawa baut ke
perakitan 5 48 1 M H 1
Memegang untuk memakai perakitan
5 Mengarahkan baut ke
perakitan 5 2 P H 2
Memegang untuk memakai perakitan
5 Memegang untuk
memakai perakitan 5
2
H RE
1
48 Menjangkau obeng Memegang untuk
memakai perakitan 5 H G Memegang obeng
Memegang untuk
memakai perakitan 5 H M 1 48 menuu perakitan 5Membawa obeng Memegang untuk
memakai perakitan 5
5
H P 1 obeng ke Mengarahkanperakitan 5
Memegang untuk
memakai perakitan 5 H U,A 4
Merakit perakitan 6 (perakitan 5 dan
badan atas stop kontak dengan
obeng) Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
Tangan kiri Jarak(cm) Waktu(s) Lambang Waktu(s) Jarak(cm) Tangan Kanan
Memegang untuk
memakai perakitan 5 7 H U,A 7
Merakit perakitan 6 (perakitan 5 dan
badan atas stop kontak dengan
Melepas perakitan 5 1 RL RL 1 Melepas obeng Keterlambatan yang
dapat dihindarkan 1 AD RL 1 48 Melepas obeng
TOTAL 768 177 177 2060
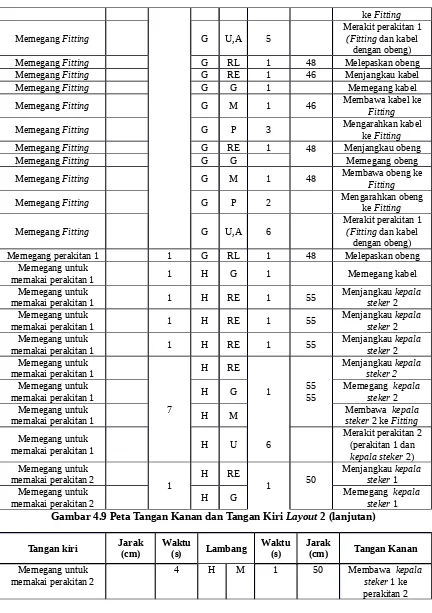
Gambar 4.9 Peta Tangan Kanan dan Tangan Kiri Layout 2 (lanjutan)
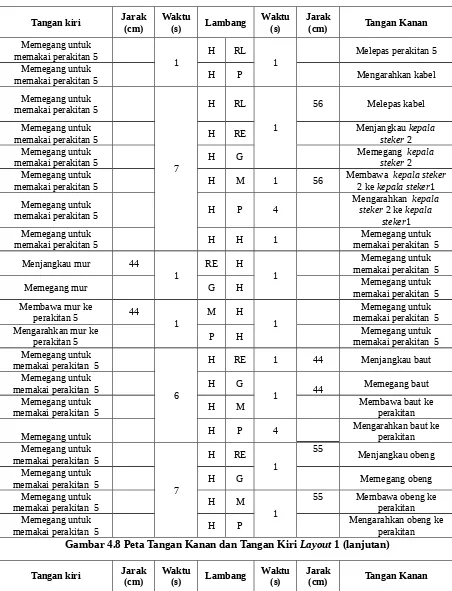
Dari gambar peta tangan kanan dan tangan kiri pada
layout
2 diatas dapat
dilihat bahwa peta tersebut menggambarkan seluruh elemen-elemen gerakan pada
saat bekerja dan waktu menganggur yang dilakukan oleh tangan kiri dan tangan
kanan. Selain itu, peta tangan kiri dan tangan kanan juga menunjukkan perbandingan
antara tugas yang dibebankan pada tangan kiri dan tangan kanan ketika melakukan
pekerjaan.
4.2.3 Pengukuran Waktu Kerja
Berikut ini adalah pengukuran waktu kerja menggunakan metode jam henti
dan MTM :
Tabel 4.2 Keseragaman Data
No .
Waktu SIklus
(x)
´
x
x
-´
x
(x -´
x
)2 σ xmax xmin BKA BKB1 6.32 5.558 0.762 0.580 0.610 6.590 4.560 6.779 4.338 2 5.49 5.558 0.068 0.005 0.610 6.590 4.560 6.779 4.338 3 5.18 5.558 0.378 0.143 0.610 6.590 4.560 6.779 4.338 4 6.32 5.558 0.762 0.580 0.610 6.590 4.560 6.779 4.338 5 5.32 5.558 0.238 0.057 0.610 6.590 4.560 6.779 4.338 6 6.05 5.558 0.492 0.242 0.610 6.590 4.560 6.779 4.338 7 5.46 5.558 0.098 0.010 0.610 6.590 4.560 6.779 4.338 8 5.49 5.558 0.068 0.005 0.610 6.590 4.560 6.779 4.338 9 6.59 5.558 1.032 1.064 0.610 6.590 4.560 6.779 4.338 10 5.25 5.558 0.308 0.095 0.610 6.590 4.560 6.779 4.338 11 5.31 5.558 0.248 0.062 0.610 6.590 4.560 6.779 4.338 12 5.04 5.558 0.518 0.269 0.610 6.590 4.560 6.779 4.338 13 5.07 5.558 0.488 0.238 0.610 6.590 4.560 6.779 4.338 14 5.09 5.558 0.468 0.219 0.610 6.590 4.560 6.779 4.338 15 5.11 5.558 0.448 0.201 0.610 6.590 4.560 6.779 4.338 16 5.01 5.558 0.548 0.301 0.610 6.590 4.560 6.779 4.338 17 4.59 5.558 0.968 0.938 0.610 6.590 4.560 6.779 4.338 18 5.31 5.558 0.248 0.062 0.610 6.590 4.560 6.779 4.338 19 6.18 5.558 0.622 0.386 0.610 6.590 4.560 6.779 4.338 20 6.22 5.558 0.662 0.438 0.610 6.590 4.560 6.779 4.338 21 5.58 5.558 0.022 0.000 0.610 6.590 4.560 6.779 4.338 22 6.56 5.558 1.002 1.003 0.610 6.590 4.560 6.779 4.338 23 6.37 5.558 0.812 0.659 0.610 6.590 4.560 6.779 4.338 24 5.46 5.558 0.098 0.010 0.610 6.590 4.560 6.779 4.338 25 6.58 5.558 1.022 1.044 0.610 6.590 4.560 6.779 4.338 26 4.69 5.558 0.868 0.754 0.610 6.590 4.560 6.779 4.338 27 4.56 5.558 0.998 0.997 0.610 6.590 4.560 6.779 4.338
Tabel 4.2 Keseragaman Data (lanjutan)
No .
Waktu SIklus
(x)
´
x
x
-´
x
(x -)2´
x
σ xmax xmin BKA BKB2
30 5.22 5.558 0.338 0.114 0.610 6.590 4.560 6.779 4.338
∑ 166,75 10.794
1. Rata-rata
´
x
=
∑
xi
n
=
166,75
30
= 5,558
2.
x
i2= (6,32)
2= 39.9424
3.
x
i-
´
x
= (6,32 - 5,558) = 0,762
4. (
X
i-
X
´
)
2= 0,580
5.
Standard
Deviasi
σ
=
√
∑
(
xj
−´
x
)
2
N
−
1
=
√
10,794
29
=
0,610
6. Uji Keseragaman Data
BKA
=´
x
+
2
σ
= 5,558 + 2(0,610) = 6,778
BKB= ´
x
−
2
σ
= 5,558 - 2(0,610) = 4,338
0 1 2 3 4 5 6 7 8
Keseragaman Data
ẋ x BKA BKB
Data
ke-W
ak
[image:30.612.113.525.111.661.2]tu
Gambar 4.10 Keseragaman Data
N'
=
(
k
/
s
√
N
.
∑
X
2j
−
∑
Xj
2∑
Xj
)
2
=
(
40
√
(
28.129
,
5
)−(
27.805,56
)
166,750
)
2
= 18,640
Hasil dari uji kecukupan data terlihat bahwa
N
'< N sehingga tidak perlu
penambahan data dan perhitungan lagi karena data yang didapat sudah
memenuhi.
8. Perhitungan Waktu Baku dengan Jam Henti
´
x
=5,558
σ
= 0,610
a. Penyesuaian:
Keterampilan : Average
= 0,00
Usaha
: Average
= 0,00
Kondisi
: Average
= 0,00
Konsistensi
: Average
= 0,00
= 0,00
p = p
o± p
i ,dimana, po = 1 ( keadaan wajar)
p = 1 + 0,00 = 1,00
Ws=
∑
xi
N
Wn=Ws x p
= 166,75 detik
= 166,75 detik
b. Kelonggaran
diabaikan karena operator bekerja di meja dan dan duduk sehingga
persentase kelonggaran 0%, Sikap kerja pada operator dalam keadaan
duduk dan pekerjaan ringan sehingga persentase kelonggaran 0%,
Gerakan kerja pada operator dalam keadaan normal sehingga persentase
kelonggaran pada operator yaitu 0%, Kelelahan mata pada operator yaitu
pandangan mata yanh hamper terus-menerus 6%. Keadaan suhu tempat
operator kerja yaitu normal suhu berkisar antara 22-28 persentase
kelonggaran sebesar 3% . Keadaan atmosfer yaitu baik di dalam ruang
yang berventilasi baik, udara disekitar operator-pun segar jadi persentase
kelonggarannya 0%. Keadaan lingkungan yang baik disekitar operator
yaitu dalam keadaan bersih, sehat, cerah dengan kebisingan rendah jauh
dari keramaian sehingga persentase kelonggarannya 0%. Dan kelonggaran
untuk kebutuhan pribadi bagi: 2,5%
Berikut ini merupakan data kelonggaran yang didapatkan:
Tenaga yang dikeluarkan
:
0
Sikap kerja
:
0 %
Gerakan kerja
:
0 %
Kelelahan mata
:
6 %
Keadaan suhu tempat kerja
:
3 %
Keadaan atmosfer
:
0 %
9%
Maka, kelonggaran total yang harus diberikan untuk pekerjaan itu adalah
(9 +5) % = 14%.
waktu baku adalah : W
b= W
n( 1 + l )
= 190,095 detik
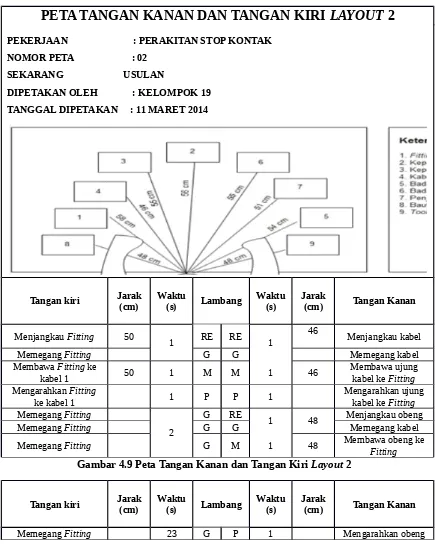
4.2.3.2
Method Time Measurement
(MTM)
Berikut ini merupakan data dari
Method Time Measurement
(MTM)
pada perakitan stop kontak adalah:
Method Time Measurement
(
MTM)
PEKERJAAN : PERAKITAN STOP KONTAK NOMOR PETA : 01
DIPETAKAN OLEH : KELOMPOK 19 TANGGAL DIPETAKAN : 11 MARET 2014
Keterangan Tangan Kiri
Jarak
Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan
inchi inchi
menjangkau
fitting 23 R23D 21,2 21,2 18,4 R18D 18
menjangkau salah satu ujung kabel sejauh 46 cm
menggengga
m fitting - G1C2 8,7 29,9 8,7 G1C2
-menggenggam kabel
membawa fitting mendekati operator sejauh 58 cm
23 M23B 19,4 49,3 17 M18B 18
membawa kabel mendekati operator sejauh 46 cm
mengarahkan fitting ke kabel
- P2SE 16,2 65,5 16,2 P2SE - mengarahkan kabel ke fitting Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak
Keterangan Tangan Kanan memberi
tekanan pada fitting
- AF 3,4 76,1 10,6 DM +AF + RLF
-menekan salah satu cabang tembaga kabel ke fitting
memberi tekanan pada
fitting - AF 3,4 79,6 3,5 T45S
-memutar tembaga pada kabel 1 kali memberi
tekanan pada
- AF 3,4 83 2 Rl1 - melepaskan
[image:34.612.113.556.111.700.2]fitting tangan dari kabel memberi
tekanan pada
fitting - AF 3,4 100,2 17,2 R19B 19
menjangkau obeng sejauh 48 cm
memberi tekanan pada fitting
- AF 3,4 108,9 8,7 G1C2 - menggenggam obeng
memberi tekanan pada
fitting - AF 3,4 125,9 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm
memberi tekanan pada
fitting - AF 3,4 131,5 5,6 P1SE
-mengarahkan obeng menuju ke lubang baut pada fitting
memberi tekanan pada
fitting - AF 3,4 134,9 3,4 AF
-menekan obeng pada lubang baut fitting
memberi tekanan pada
fitting - AF 3,4 143 8,1 T150S - memutar obeng
memberi tekanan pada
fitting - AF 3,4 151,1 8,1 T150S - memutar obeng
memberi tekanan pada fitting
- AF 3,4 159,2 8,1 T150S - memutar obeng
memberi tekanan pada
fitting - AF 3,4 167,3 8,1 T150S - memutar obeng
memberi tekanan pada
fitting - AF 3,4 175,4 8,1 T150S - memutar obeng
memberi tekanan pada
fitting - AF 3,4 186 10,6
AF + DM +
RLF
-mengencangkan baut
Gambar 4.11 Method Measurement (MTM) (lanjutan)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada
fitting - AF 3,4 203 17 M19B 19
membawa obeng ke tempat semula memberi
tekanan pada
fitting - AF 3,4 206,4 2 RL1
-melepaskan obeng memberi
tekanan pada fitting
memberi tekanan pada
fitting - AF 3,4 232,3 8,7 G1C2
-memegang kabel tembaga
memberi tekanan pada
fitting - AF 3,4 242,9 10,6
AF + DM +
RLF
-menekan ujung tembaga ke fitting memberi
tekanan pada
fitting - AF 3,4 246,4 3,5 T45S
-memutar tembaga pada kabel 1 kali memberi
tekanan pada fitting
- AF 3,4 249,8 2 Rl1 - melepaskan genggaman tangan dari kabel memberi
tekanan pada
fitting - AF 3,4 267 17,2 R19B 19
menjangkau obeng sejauh 48 cm
memberi tekanan pada
fitting - AF 3,4 275,7 8,7 G1C2
-menggenggam obeng
memberi tekanan pada
fitting - AF 3,4 292,7 17 M19B 19
membawa obeng mendekati operator sejauh memberi
tekanan pada
fitting - AF 3,4 298,3 5,6 P1SE
-mengarahkan obeng menuju ke lubang baut pada fitting
memberi tekanan pada fitting
- AF 3,4 301,7 3,4 AF - menekan obeng pada lubang baut fitting
memberi tekanan pada
fitting - AF 3,4 309,8 8,1 T150S - memutar obeng
memberi tekanan pada
fitting - AF 3,4 317,9 8,1 T150S - memutar obeng
Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada
fitting - AF 3,4 326 8,1 T150S - memutar obeng
memberi tekanan pada
fitting - AF 3,4 334,1 8,1 T150S - memutar obeng
memberi tekanan pada
[image:36.612.112.558.110.686.2]memberi tekanan pada
fitting - AF 3,4 352,8 10,6
AF + DM + RLF -mengencangkan baut memberi tekanan pada fitting
- AF 3,4 369,8 17 M19B 19 membawa obengke tempat semula memberi
tekanan pada
fitting - AF 3,4 371,8 2 RL1
-melepaskan obeng memberi
tekanan pada
fitting - AF 3,4 390,2 18,4 R18D 18
menjangkau kabel memberi
tekanan pada
fitting - AF 3,4 398,9 8,7 G1C2 - memegang kabel
memberi tekanan pada
fitting - AF 3,4 409,5 10,6
AF + DM + RLF -mengencangkan kabel memberi tekanan pada
fitting - AF 3,4 411,5 2 Rl1
-melepaskan kabel memberi
tekanan pada
fitting - AF 3,4 431,6 20,1 R22B 22
menjangkau kepala steker 2 memberi
tekanan pada fitting
- AF 3,4 433,6 2 G1A - menggenggam kepala steker 2
memberi tekanan pada
fitting - AF 3,4 453 19,4 M22B 22
membawa kepala steker 2 mendekati operator sejauh memberi tekanan pada
fitting - AF 3,4 456,4 2 Rl1
-melepaskan kepala steker 2 ke atas meja Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada
fitting - AF 3,4 459,8 2 RfB <1
menjangkau fitting memberi
tekanan pada fitting
- DM +AF + RLF
10,6 470,4 8,7 G1C2 - memegang fitting melepaskan
[image:37.612.114.558.117.690.2]menjangkau kepala steker
2 <1 RfB 2 487,8 8,7 G1C2
-memegang fitting menggengga
m kepala steker 2
- G1A 2 496,5 8,7 G1C2 - memegang fitting menahan
(memberi tekanan) pada steker 2)
- AF 3,4 499,9 2 MfB <1
membawa fitting mendekati kepala steker 2 menahan (memberi tekanan) pada steker 2)
- AF 4,4 516,1 16,2 P2SE
-mengarahkan fitting menuju kepala steker 2 menahan
(memberi tekanan) pada steker 2)
- AF 5,4 526,7 10,6
AF + DM + RLF -menekan (merakit) fitting dengan kepala steker 2 menahan (memberi tekanan) pada steker 2)
- AF 6,4 533,1 2 Rl1 - melepaskan fitting
menahan (memberi tekanan) pada steker 2)
- AF 7,4 553,2 20,1 R22B 22 menjangkau kepala steker 1
menahan (memberi tekanan) pada steker 2) -AF + DM +
RLF 10,6 563,8 2 G1A
-memegang kepala steker 1
melepaskan kepala steker
2 - Rl1 2 583,2 19,4 M22B 22
membawa kepala steker 1
mendekati operator Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan
menjangkau kepala steker
1 <1 RfB 2 599,4 16,2 P2SE
-mengarahkan kepala steker 1 mendekati assembly fitting + kabel + kepala steker 2
memegang kepala steker
[image:38.612.113.558.108.706.2]1
mengarahkan kepala steker 1 mendekati assembly fitting + kabel + kepala steker 2
- P2SE 16,2 617,6 - - menganggur
memberi tekanan kepada kepala steker 1
- AF 3,4 621 3,4 AF - memberi tekanankepada kepala steker 1
membalik (memutar) assembly kepala steker 1,2 + kabel + fitting
- T180S 9,4 630,4 9,4 T180S
-membalik (memutar) assembly kepala steker 1,2 + kabel + fitting melepaskan
assembly - Rl1 2 633,8 3,4 AF - menekan assembly menjangkau
mur sejauh 48
cm 19 R19D 18,4 652,2 3,4 AF
-menekan assembly memegang
mur - G1B 3,5 655,7 3,4 AF - menekan assembly
membawa mur mendekati operator sejauh 48 cm
19 M19B 17 672,7
3,4
AF - menekan assembly
mengarahkan mur menuju kepala steker 2
- P2SE 16,2 688,9
3,4
AF - menekan assembly
menempelkan (memberi tekanan) mur
- AF 3.4 692,3
2 G1A
-memegang assembly Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan membalik
assembly - T180S 9,4 701,7 9,4 T180S - membalik assembly menjangkau
assembly - RfB 2 703,7 2 Rl1
[image:39.612.111.560.112.696.2]memegang
assembly - G1A 2 722,1 18,4 R19D 19 menjangkau bautsejauh 48 cm memegang
assembly - G1A 2 725,6 3,5 G1B - memegang baut
memegang
assembly - G1A 2 742,6 17 M19B 19
membawa baut mendekati operator sejauh 48
memegang
assembly - G1A 2 758,8 16,2 P2SE
-mengarahkan baut menuju kepala steker 1 memegang
assembly - G1A 2 769,4 10.6
AF + DM +
RLF
-memberi tekanan pada baut memegang
assembly - G1A 2 771,4 2 Rl1 - melepaskan baut
memegang
assembly - G1A 2 788,6 17,2 R19B 19
menjangkau obeng sejauh 48 cm
memegang
assembly - G1A 2 797,3 8,7 G1C2
-menggenggam obeng
memegang
assembly - G1A 2 814,3 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm
memegang
assembly - G1A 2 819,9 5,6 P1SE
-mengarahkan obeng menuju baut
memegang
assembly - G1A 2 823,3 3,4 AF
-menekan obeng pada lubang baut fitting
memegang
assembly - G1A 2 831,4 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 839,5 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 847,6 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 855,7 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 863,8 8,1 T150S - memutar obeng
Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memegang
assembly - G1A 2 871,9 8,1 T150S - memutar obeng
memegang
[image:40.612.113.559.109.697.2]memegang
assembly - G1A 2 888,1 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 896,2 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 904,3 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 912,4 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 920,5 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 928,6 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 936,7 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 944,8 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 952,9 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 961 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 969,1 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 977,2 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 985,3 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 993,4 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 1001,5 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 1009,6 8,1 T150S - memutar obeng
memegang
assembly - G1A 2 1017,7 8,1 T150S - memutar obeng
membawa assembly ke
meja <1 MfB 2 1033,7 16 M19B 19
membawa obeng menuju ke tempat semula melepaskan
assembly - Rl1 2 1035,7 2 RL1
-melepaskan obeng dari genggaman Gambar 4.11 Method Time Measurement (MTM)
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak
Keterangan Tangan Kanan menjangkau
ujung kabel
yang lain 18 R18D 18,4 1055,8 20,1 R21.6B 21,6
[image:41.612.112.557.110.703.2]memegang
ujung kabel - G1C2 8,7 1064,5 2 G1A
-memegang badan bawah steker membawa
ujung kabel mendekati operator sejauh 46 cm
18 M18B 17 1083,9 19,4 M21.6B 21,6
membawa badan bawah steker mendekati operator
menganggur - - - 1085,9 2 Rl1
-melepaskan badan bawah steker menganggur - - - 1093,2 7,3 R3D 3 menjangkau ujung kabel melepaskan
genggaman
dari kabel - Rl1 2 1101,9 8,7 G1C2
-menggenggam ujung kabel menjangkau
badan bawah
steker bawah 3 R3B 5,3 1110,6 8,7 G1C2
-menggenggam ujung kabel memegang
badan bawah steker
- G1A 2 1119,3 8,7 G1C2 - menggenggam ujung kabel menekan
badan bawah
steker
-AF + DM +
RLF 10,6 1129,9 8,7 G1C2
menggenggam ujung kabel mengarahkan
(menggeser) badan bawah steker dengan kabel
- P1SE 5,6 1135,5 5,6 P1SE
-mengarahkan kabel dengan badan bawah steker melepaskan
genggaman dari badan bawah steker
- Rl1 2 1144,2 8,7 G1C2 - menggenggam ujung kabel
menjangkau
kabel <1 RfD 2 1152,9 8,7 G1C2 - menggenggam ujung kabel memegang
kabel - G1C2 8,7 1161,6 8,7 G1C2
-menggenggam ujung kabel mengarahkan
kabel dengan badan bawah steker
- P2SE 16,2 1177,8 8,7 G1C2 - menggenggam ujung kabel
Gambar 4.11 Method Time Measurement (MTM)
Keterangan
[image:42.612.112.556.108.680.2]memberi tekanan pada kabel dengan badan bawah steker
- DM +AF +
RLF 10,6 1188,4 3,4 AF
-memberi tekanan pada kabel dengan badan bawah steker melepaskan genggaman
dari kabel - Rl1 2 1191,8 3,4 AF
-memberi tekanan pada kabel dengan badan bawah steker menjangkau
baut sejauh 48
cm 19 R19D 18,4 1210,2 3,4 AF
-memberi tekanan pada kabel dengan badan bawah steker memegang
baut - G1B 3,5 1213,7 3,4 AF
-memberi tekanan pada kabel dengan badan bawah steker membawa baut mendekati operator sejauh 48
19 M19B 17 1230,7 3,4 AF
-memberi tekanan pada kabel dengan badan bawah steker mengarahkan salah satu baut menuju badan bawah steker
- P2SE 16,3 1247 3,4 AF
-memberi tekanan pada kabel dengan badan bawah steker memberi tekanan pada baut
- DM +AF + RLF
10,6 1257,6 10,6 DM +AF + RLF -memberi tekanan pada kabel dengan badan bawah steker melepaskan
baut - Rl1 2 1259,6 2 Rl1
-melepas genggaman dari badan bawah steker menjangkau badan bawah
steker 3 R3B 5,3 1278 18,4 R19D 19 menjangkau baut
memegang badan bawah
steker - G1A 2 1281,5 3,5 G1B - memegang baut
memberi tekanan pada badan bawah steker
- AF 3,4 1297,7 16,2 P2SE
[image:43.612.112.558.111.703.2]Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada badan bawah steker
- AF 3,4 1301,1 2 Rl1 - melepaskan baut dari genggaman
memberi tekanan pada badan bawah steker
- AF 3,4 1318,3 17,2 R19B 19 menjangkau obeng sejauh 48 cm
memberi tekanan pada badan bawah steker
- AF 3,4 1327 8,7 G1C2 - menggenggam obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1344 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm
memberi tekanan pada badan bawah steker
- AF 3,4 1349,6 5,6 P1SE - mengarahkan obeng menuju baut pertama memberi
tekanan pada badan bawah steker
- AF 3,4 1353 3.4 AF
-menekan obeng pada lubang baut badan bawah steker memberi
tekanan pada badan bawah steker
- AF 3,4 1361,1 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1369,2 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1377,3 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1385,4 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1393,5 8,1 T150S - memutar obeng
[image:44.612.110.561.109.701.2]Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada badan bawah steker
- AF 3,4 1401,6 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1409,7 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1417,8 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1425,9 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1434 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1442,1 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1450,2 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1458,3 8,1 T150S memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1466,4 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1474,5 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1482,6 8,1 T150S - memutar obeng
[image:45.612.109.559.109.702.2]Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada badan bawah steker
- AF 3,4 1490,7 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1498,8 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1506,9 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
- AF 3,4 1515 8,1 T150S - memutar obeng
memberi tekanan pada badan bawah steker
-AF + DM +
RLF 10,6 1532 17 M19B 19
membawa obeng ke tempat semula sejauh 48 cm melepaskan
genggaman dari badan bawah steker
- RL1 2 1534 2 RL1 - melepaskan obeng
menjangkau baut sejauh 48 cm
19 R19D 18,4 1552,4 18,4 R19D 19 menjangkau kabel memegang
baut - G1B 3,5 1563,2 10,8 G1C3 - memegang kabel
membawa baut mendekati operator sejauh 48
19 M19B 17 1580,2 16,2 P2SE
-memposisikan kabel dengan lubang pada badan bawah steker membawa
baut mendekati operator
19 M19B 18 1598,2 2 Rl1 - melepaskan kabel dari genggaman membawa
baut mendekati operator
19 M19B 19 1617,2 6,1 R4A 4 menjangkau bautdari tangan kiri
melepaskan
baut - Rl1 2 1620,7 3,5 G1B - memegang baut
[image:46.612.109.560.108.701.2]Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan
menjangkau badan bawah steker
4 R4B 6,4 1636,9 16,2 P2SE
-mengarahkan baut menuju badan bawah steker memegang
badan bawah
steker - G1A 2 1640,3 3,4 AF
-memberi tekanan pada baut memberi
tekanan pada badan bawah steker
- AF 3,4 1643,3 2 Rl1 - melepaskan baut
menjangkau
baut 4 R4A 6,1 1660,5 17,2 R19B 19
menjangkau obeng sejauh 48 cm
memegang
baut - G1B 3,5 1669,2 8,7 G1C2 - menggenggam obeng
memberi tekanan pada baut
- P2SE 16,2 1686,2 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm
memberi tekanan pada
baut - P2SE 16,2 1702,4 5,6 P1SE
-mengarahkan obeng menuju baut pertama memberi
tekanan pada
baut - P2SE 16,2 1818,6 3,4 AF
-menekan obeng pada lubang baut badan bawah steker memberi
tekanan pada baut
- P2SE 16,2 1834,8 8,1 T150S - memutar obeng memberi
tekanan pada
baut - P2SE 16,2 1851 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 1867,2 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 1883,4 8,1 T150S - memutar obeng
memberi tekanan pada baut
- P2SE 16,2 1899,6 8,1 T150S - memutar obeng memberi
tekanan pada
baut - P2SE 16,2 1915,8 8,1 T150S - memutar obeng
Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan
memberi tekanan pada
baut - P2SE 16,2 1932 8,1 T150S - memutar obeng
memberi tekanan pada baut
- P2SE 16,2 1948,2 8,1 T150S - memutar obeng memberi
tekanan pada
baut - P2SE 16,2 1964,4 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 1980,6 8,1 T150S - memutar obeng
memberi tekanan pada baut
- P2SE 16,2 1996,8 8,1 T150S - memutar obeng memberi
tekanan pada baut
- P2SE 16,2 2013 8,1 T150S - memutar obeng memberi
tekanan pada
baut - P2SE 16,2 2029,2 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 2045,4 8,1 T150S - memutar obeng
memberi tekanan pada baut
- P2SE 16,2 2061,6 8,1 T150S - memutar obeng memberi
tekanan pada
baut - P2SE 16,2 2077,8 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 2094 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 2110,2 8,1 T150S - memutar obeng
memberi tekanan pada baut
- P2SE 16,2 2126,4 8,1 T150S - memutar obeng memberi
tekanan pada
baut - P2SE 16,2 2142,6 8,1 T150S - memutar obeng
memberi tekanan pada
baut - P2SE 16,2 2158,8 8,1 T150S - memutar obeng
[image:48.612.112.558.110.693.2]Keterangan
Tangan Kiri Jarak Kode TMU Kumulatif TMU Kode Jarak Tangan KananKeterangan memberi
tekanan pada
baut - P2SE 16,2 2175 8,1 T150S - memutar obeng
melepaskan baut dari genggaman
- Rl1 2 2192 17 M19B 19 membawa obengke tempat semula sejauh 48 cm
menganggur - - - 2194 2 Rl1 - melepaskan obeng
menjangkau
kabel 2 R2D 5,9 2199,9 5,9 R2D 2
menjangkau kabel memegang
kabel - G1C3 10,8 2210,7 10,8 G1C3 - memegang kabel
mengarahkan kabel dengan badan bawah steker
- P2SE 16,2 2226,9 16,2 P2SE
-mengarahkan kabel dengan badan bawah steker memberi tekanan pada kabel dengan badan bawah steker
- AF 3,4 2237,5 10,6
AF + DM + RLF -memberi tekanan pada kabel dengan badan bawah steker memberi tekanan pada kabel dengan badan bawah steker
- AF 3,4 2240,9 2 Rl1 - melepaskan genggaman pada kabel memberi tekanan pada kabel dengan badan bawah steker
- AF 3,4 2260,7 19,8 R20D 20 menjangkau penjepit sejauh 51 cm memberi tekanan pada kabel dengan badan bawah steker
- AF 3,4 2264,2 3,5 G1B - memegang penjepit
memberi tekanan pada kabel dengan badan bawah steker
- DM +AF + RLF
10,6 2282,4 18,2 M20B 20
membawa penjepit menuju ke operator sejauh 51 cm melepaskan
tangan dari badan bawah steker
- Rl1 2 2298,6 16,2 P2SE
-mengarahkan penjepit menuju ke badan bawah steker
Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak Tangan KananKeterangan menjangkau
baut sejauh 48
cm 19 R19D 18,4 2317 3,4 AF
-memberi tekanan pada penjepit ke badan bawah steker memegang
baut - G1B 3,5 2320,5 3,4 AF
-memberi tekanan pada penjepit ke badan bawah steker membawa baut mendekati operator sejauh 48
19 M19B 17 2337,5 3,4 AF
-memberi tekanan pada penjepit ke badan bawah steker mengarahkan baut menuju kepala steker 1
- P2SE 18,2 2355,7 10,6 DM +AF + RLF
-memberi tekanan pada penjepit ke badan bawah steker memberi
tekanan pada
baut - AF 3,4 2372,9 17,2 R19B 19
menjangkau obeng sejauh 48 cm
memberi tekanan pada baut
- AF 3,4 2381,6 8,7 G1C2 - menggenggam obeng
memberi tekanan pada
baut - AF 3,4 2398,6 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm memberi tekanan pada baut
- AF 3,4 2404,2 5,6 P1SE - mengarahkan obeng menuju baut
memberi tekanan pada
baut - AF 3,4 2407,6 3,4 AF
-menekan obeng pada lubang baut fitting
memberi tekanan pada
baut - AF 3,4 2415,7 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada baut
- AF 3,4 2423,8 8,1 T150S - memutar obeng 16 kali memberi
tekanan pada
baut - AF 3,4 2431,9 8,1 T150S
-memutar obeng 16 kali
[image:50.612.111.558.107.707.2]Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak
Keterangan Tangan Kanan
memberi tekanan pada
baut - AF 3,4 2440 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada
baut - AF 3,4 2448,1 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada
baut - AF 3,4 2456,2 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada
baut - AF 3,4 2464,3 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada baut
- AF 3,4 2472,4 8,1 T150S - memutar obeng 16 kali memberi
tekanan pada
baut - AF 3,4 2480,5 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada
baut - AF 3,4 2488,6 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada baut
- AF 3,4 2496,7 8,1 T150S - memutar obeng 16 kali memberi
tekanan pada baut
- AF 3,4 2504,8 8,1 T150S - memutar obeng 16 kali memberi
tekanan pada
baut - AF 3,4 2512,9 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada
baut - AF 3,4 2521 8,1 T150S
-memutar obeng 16 kali
memberi tekanan pada baut
- AF 3,4 2529,1 8,1 T150S - memutar obeng 16 kali memberi
tekanan pada
baut - AF 3,4 2537,2 8,1 T150S
-memutar obeng 16 kali memberi tekanan pada baut -AF + DM +
RLF 10,6 2554,2 17 M19B 19
[image:51.612.114.558.108.698.2]Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak
Keterangan Tangan Kanan
melepaskan
baut - Rl1 2 2556,2 2 RL1
-melepaskan obeng dari genggaman menjangkau
baut sejauh 48
cm 19 R19D 17,2 2573,4 2 RFD
-menjangkau penjepit memegang
baut - G1B 3,5 2576,9 3,5 G1B
-memegang penjepit membawa baut mendekati operator sejauh 48
19 M19B 17 2593,9 3,4 AF - memberi tekananpada penjepit
mengarahkan baut menuju kepala steker 1
- P2SE 16,2 2610,1 3,4 AF - memberi tekananpada penjepit
memberi tekanan pada baut
- AF 3,4 2620,7 10,6 DM +AF + RLF
- memberi tekananpada penjepit memberi
tekanan pada
baut - AF 3,4 2624,1 2 Rl1
-melepaskan penjepit dari genggaman memberi
tekanan pada
baut - AF 3,4 2641,3 17,2 R19B 19
menjangkau obeng sejauh 48 cm
memberi tekanan pada
baut - AF 3,4 2650 8,7 G1C2
-menggenggam obeng
memberi tekanan pada
baut - AF 3,4 2667 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm memberi tekanan pada baut
- AF 3,4 2672,6 5,6 P1SE - mengarahkan obeng menuju baut
memberi tekanan pada
baut - AF 3,4 2676 3,4 AF
-menekan obeng pada lubang baut fitting
memberi tekanan pada
baut - AF 3,4 2684,1 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada
baut - AF 3,4 2692,2 8,1 T150S
Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak
Keterangan Tangan Kanan memberi
tekanan pada
baut - AF 3,4 2700,3 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada
baut - AF 3,4 2708,4 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada baut
- AF 3,4 2716,5 8,1 T150S - memutar obeng 18 kali memberi
tekanan pada
baut - AF 3,4 2724,6 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada
baut - AF 3,4 2732,7 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada baut
- AF 3,4 2740,8 8,1 T150S - memutar obeng 18 kali memberi
tekanan pada
baut - AF 3,4 2748,9 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada
baut - AF 3,4 2757 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada baut
- AF 3,4 2765,1 8,1 T150S - memutar obeng 18 kali memberi
tekanan pada baut
- AF 3,4 2773,2 8,1 T150S - memutar obeng 18 kali memberi
tekanan pada
baut - AF 3,4 2781,3 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada
baut - AF 3,4 2789,4 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada baut
- AF 3,4 2797,5 8,1 T150S - memutar obeng 18 kali memberi
tekanan pada
baut - AF 3,4 2805,6 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada
baut - AF 3,4 2813,7 8,1 T150S
-memutar obeng 18 kali
[image:53.612.113.559.108.702.2]Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak Tangan KananKeterangan memberi
tekanan pada
baut - AF 3,4 2821,8 8,1 T150S
-memutar obeng 18 kali
memberi tekanan pada baut
- DM +AF + RLF
10,6 2838,8 17 M19B 19 membawa obengmenuju ke tempat semula melepaskan
baut dari
genggaman - Rl1 2 2840,8 2 RL1
-melepaskan obeng dari genggaman menjangkau
badan steker
bawah <1 RfB 2 2860,9 20,1 R21.25B 21,5
menjangkau badan steker atas memegang
badan steker
bawah - G1A 2 2862,9 2 G1A
-memegang badan steker atas memberi
tekanan pada badan steker bawah
- DM +AF +
RLF 10,6 2882,3 19,4 M21.25B 21,5
membawa badan steker atas menuju ke operator melepaskan badan steker
bawah - Rl1 2 2901,7 19,4 M21.25B 21,5
membawa badan steker atas menuju ke operator menjangkau badan steker
atas <1 RfB 2 2921,1 19,4 M21.25B 21,5
membawa badan steker atas menuju ke operator memegang badan steker
atas - G1A 2 2940,5 19,4 M21.25B 21,5
membawa badan steker atas menuju ke operator mengarahkan badan steker atas ke badan steker bawah
- P2SE 16,2 2956,7 16,2 P2SE
-mengarahkan badan steker atas ke badan steker bawah
memberi tekanan pada badan steker atas
- AF 3,4 2967,3 10,6 DM +AF +
RLF -memberi tekanan pada badan steker atas memberi tekanan pada badan steker atas
[image:54.612.112.559.109.704.2]Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak Tangan KananKeterangan memberi
tekanan pada badan steker atas
- AF 3,4 2989,1 18,4 R19D 19 menjangkau bautsejauh 48 cm
memberi tekanan pada badan steker atas
- AF 3,4 2992,6 3,5 G1B - memegang baut
memberi tekanan pada badan steker atas
- AF 3,4 3139,6 17 M19B 19
membawa baut mendekati operator sejauh 48
memberi tekanan pada badan steker atas
- AF 3,4 3155,8 16,2 P2SE - mengarahkan baut menuju badan steker atas memberi
tekanan pada badan steker atas
- AF 3,4 3159,2 3,4 AF - memberi tekananpada baut
memberi tekanan pada badan steker atas
- AF 3,4 3162,6 2 Rl1 - melepaskan baut
memberi tekanan pada badan steker atas
- AF 3,4 3166 2 RfB - menjangkau badan steker atas
memberi tekanan pada badan steker atas
- DM +AF +
RLF 10,6 3176,6 2 G1A
-memegang badan steker atas melepaskan
badan steker
atas - Rl1 2 3180 3,4 AF
-memberi tekanan pada badan steker atas menjangkau
baut sejauh 48 cm
19 R19D 17,2 3197,2 3,4 AF - memberi tekananpada badan steker atas memegang
baut - G1B 3,5 3200,7 2 Rl1
[image:55.612.112.559.110.704.2]Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak Tangan KananKeterangan membawa
baut mendekati operator sejauh 48
19 M19B 17 3219,3 18,6 R19B 19 menjangkau obeng sejauh 48 cm
Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak Tangan KananKeterangan
mengarahkan baut menuju badan steker atas
- P2SE 16,2 3235,5 8,7 G1C2 - menggenggam obeng
memberi tekanan pada
baut - AF 3,4 3252,5 17 M19B 19
membawa obeng mendekati operator sejauh 48 cm
melepaskan
baut - Rl1 2 3258,1 5,6 P1SE
-mengarahkan obeng menuju baut pertama menjangkau
badan atas steker
<1 RfB 2 3261,5 3,4 AF
-menekan obeng pada lubang baut pada badan steker atas memegang
badan atas
steker - G1A 2 3269,6 8,1 T150S
-memutar obeng 18 kali
memegang badan atas
steker - G1A 2 3277,7 8,1 T150S
-memutar obeng 18 kali
memegang badan atas steker
- G1A 2 3285,8 8,1 T150S - memutar obeng 18 kali memegang
badan atas
steker - G1A 2 3293,9 8,1 T150S
-memutar obeng 18 kali
memegang badan atas
steker - G1A 2 3302 8,1 T150S
-memutar obeng 18 kali
memegang badan atas steker
- G1A 2 3310,1 8,1 T150S - memutar obeng 18 kali memegang
badan atas steker
[image:56.612.109.559.110.703.2]Keterangan
Tangan Kiri Jarak LH TMU Kumulatif TMU RH Jarak Tangan KananKeterangan memegang
badan atas
steker - G1A 2 3326,3 8,1 T150S
-memutar obeng 18 kali
memegang badan atas steker
- G1A 2 3334,4 8,1 T150S - memutar obeng 18 kali memegang
badan atas
steker - G1A 2 3342,5 8,1 T150S