Rancang Bangun Sistem Pengendalian Nirkabel Pada Pengemudian Traktor Mini
Teks penuh
Gambar



Dokumen terkait
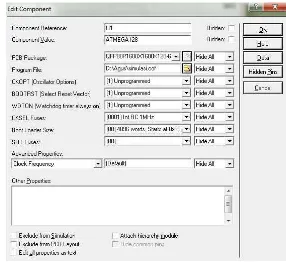
dapat dilakukan ” upload ” pada saat program kemudi dalam keadaan running. Sistem keypad berlaku sebagai user interface , yang menjembatani kebutuhan.. data-data yang bersifat
Pada sistem kontrol stir kemudi, nilai yang dibandingkan adalah sudut yang terbentuk pada roda depan dengan nilai absolute encoder, sedangkan pada tuas akselerator
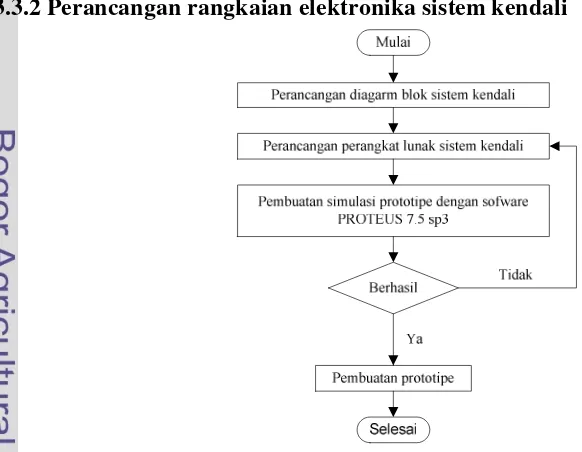
Namun, pada tugas akhir ini rancang bangun sel surya akan dibuat dengan meng-gunakan logika fuzzy untuk mengontrol besar pulsa sinyal PWM yang diberikan kepada DC-DC buck
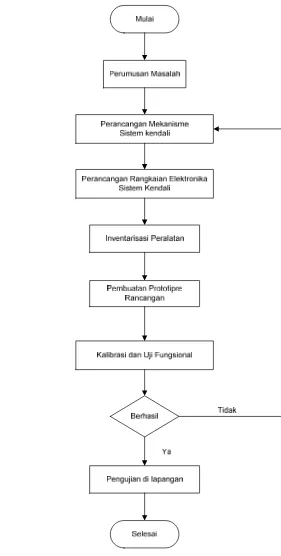
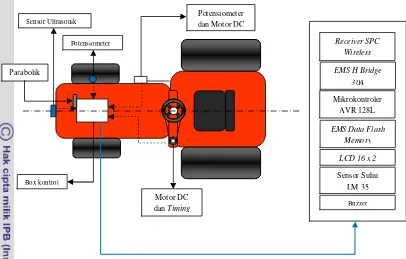
Tujuan dari penelitian ini adalah untuk memodifikasi mekanisme pengedalian seperti steering (roda kemudi), gas dan kopling pada traktor mini roda empat Kubota
Pada sistem kontrol stir kemudi, nilai yang dibandingkan adalah sudut yang terbentuk pada roda depan dengan nilai absolute encoder, sedangkan pada tuas akselerator nilai
Proses Kendali proportional Baca nilai suhu sensor atas dan sensor bawah. Kendalikan Nilai
Nilai batas ambang yang digunakan adalah diatas 500ppm, sehingga apabila konsentrasi gas LPG di udara yang terbaca oleh sensor melebihi 500ppm maka Arduino akan memberikan sinyal
Sistem kendali fuzzy berbasis PWM akan melakukan proses pengendalian nilai PWM sesuai dengan kondisi error nilai EC ( Electrical Conductivity ) dan level
