SIMULASI PENDARATAN DARURAT PADA HELIKOPTER
MAINAN BERBASIS MIKROKONTROLER ATMEGA8
SKRIPSI
JONI
NIM : 090821021
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERNYATAAN
Simulasi Pendaratan Darurat pada Helikopter Mainan Berbasis
Mikrokontroler Atmega8
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 12 Desember 2011
Joni
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa karena dengan berkat dan kelimpahan serta kebaikanNya maka laporan ini dapat diselesaikan tepat pada waktunya.
Dalam penyelesaian tugas akhir serta penulisan laporannya, penulis mengucapkan banyak terimakasih kepada Bapak Drs. Kurnia Brahmana M.Si selaku dosen pembimbing yang telah banyak membimbing dan memberikan masukan dan koreksi kepada penulis dalam menyelesaikan tugas akhir ini. Ucapan terimakasih juga penulis ucapkan kepada Bapak Dr. Marhaposan Situmorang, Bapak Drs. Aditia Warman,M.Si, Bapak Drs. Herli Ginting,MS selaku dosen pembanding yang telah banyak memberikan masukan untuk kesempurnaan tugas akhir ini. Dan kepada Bapak Dekan FMIPA USU dan Bapak/Ibu Dosen di Departemen Fisika FMIPA USU serta Staf pegawai yang memberi saran, dukungan dan banyak motivasi selama penyelesaian tugas akhir ini.
Untuk sahabat-sahabat terbaikku : Aldy Sinambela, S.Pd, Wira Sihombing, S.Kom, Tarimal Tampubolon, S.Kom, Syarif Panjaitan, S.Pd, Mangapul Sianturi, Jimmy Hutabarat, dan sahabat lainnya yang belum penulis sebutkan. Juga untuk teman seperjuangan dalam menyelesaikan skripsi ini, Ginda ucup Tabur Simatupang, Terry Situmorang, Andi Siboro, Ramli Butar-butar, dan Miduk Purba yang selalu ada saat dibutuhkan.
ABSTRAK
Simulasi Pendaratan Darurat pada Helikopter Mainan Berbasis
Mikrokontroler ATMega8
ABSTRACT
An Emergency Landing Simulation of RC Helicopter Based ATMega8 Microcontroller
DAFTAR ISI
BAB 2. TEORI DASAR DAN PENDUKUNG ... 5
2.1. Metode Pendaratan Helikopter Tanpa Awak ... 5
2.1.1. Radar (Radio Detection and Ranging) ... 5
2.1.2. Pengolahan Citra (Visual Landmarks) ... 6
2.1.3. Estimasi Posisi (Position estimation)... 7
2.1.3.1 Cara Kerja GPS ... 7
2.2. Mikrokontroler ATMega8 ... 9
2.3. Sensor Ultrasonic ... 15
2.4. Pemancar dan Penerima (Transmitter and Receiver) ... 16
2.5. Pengontrol Kecepatan ... 17
2.6. Giroskop ... 17
BAB III PERANCANGAN ALAT DAN PROGRAM ... 21
3.1. Diagram Blok ... 21
3.2. Rangkaian Regulator ... 23
3.3. Perancangan Rangkaian Mikrokontroller Atmega8... 23
3.4. Baterai ... 24
3.5. Rangkaian Sensor Jarak (PING) ... 24
3.6. Helikopter ... 25
3.6.1. Gyroscope and Speed Controler ... 25
3.6.2. Pemancar (Transmitter) ... 26
3.6.3. Penerima (Receiver) ... 26
3.7. Perancangan Program ... 27
BAB IV PENGUJIAN ALAT DAN PROGRAM ... 29
4.1. Pengujian Mikrokontroller ATMega8 ... 29
4.2. Pengujian Speed Controller dan Electronic Gyroscope ... 33
4.3. Pengujian Rangkaian Sensor Ping Ultrasonik ... 37
4.4. Pengujian Pemancar dan Pembacaan Tegangan Pada Modul Penerima ... 42
4.5. Pengujian Rangkaian Keseluruhan dan Pengoperasian Alat ... 44
4.5.1. Hasil Pengoperasian ... 45
BAB V KESIMPULAN DAN SARAN ... 46
5.1. Kesimpulan ... 46
5.2. Saran ... 46
DAFTAR PUSTAKA ... 47
LAMPIRAN A ... 48
DAFTAR GAMBAR
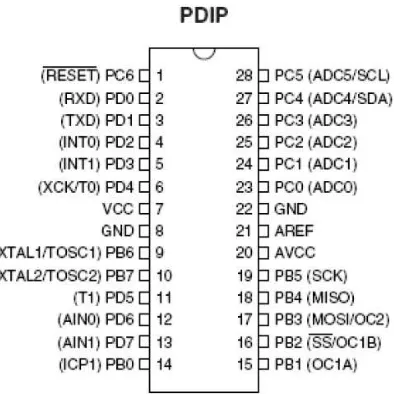
1. Gambar 2.1 Pin Configuration ... 10
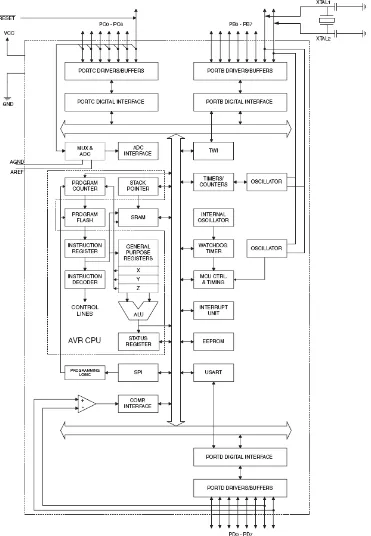
2. Gambar 2.2 Blok Diagram ATMega8 ... 12
3. Gambar 2.3 Status Register ATMega8 ... 13
4. Gambar 2.6 Ping Parallax Ultrasonic Range Finder ... 15
5. Gambar 2.7 Pulsa Ping Parallax Ultrasonic Range Finder ... 16
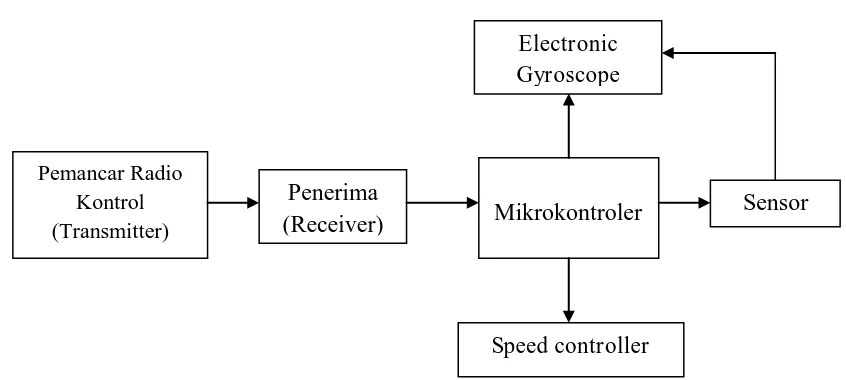
6. Gambar 3.1 Diagram Blok Rangkaian ... 21
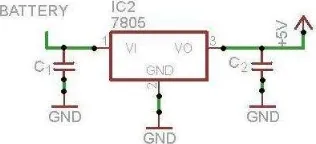
7. Gambar 3.2 Rangkaian Regulator ... 23
8. Gambar 3.3 Rangkaian mikrokontroller ATMega8 ... 23
9. Gambar 3.4 Baterai Lithium-Ion ... 24
10. Gambar 3.5 Baling-baling utama helikopter ... 25
11. Gambar 3.6 Baling-baling ekor helikopter ... 25
12. Gambar 3.7 Pemancar radio kontrol ... 26
13. Gambar 3.3 Modul penerima pada helikopter ... 26
14. Gambar 3.4 Diagram Alir Rangkaian ... 27
DAFTAR TABEL
1. Tabel 4.1 Pengukuran Jarak Sensor Ultrasonik ... 41
2. Tabel 4.2 Pengukuran Tegangan pada Modul Penerima ... 42
3. Tabel 4.3 Pengukuran pengaruh Tegangan terhadap jarak pemancar ... 42
4. Tabel 4.4 Pengukuran Tegangan Input Driver pada Modul Penerima ... 43
ABSTRAK
Simulasi Pendaratan Darurat pada Helikopter Mainan Berbasis
Mikrokontroler ATMega8
ABSTRACT
An Emergency Landing Simulation of RC Helicopter Based ATMega8 Microcontroller
BAB I
PENDAHULUAN
1.1LATAR BELAKANG
Teknologi alat transportasi yang berkembang memudahkan manusia untuk melakukan perpindahan dalam waktu yang lebih singkat, baik melalui darat, laut, maupun udara. Masing-masing cara transportasi tersebut memiliki keunggulan tersendiri bila dilihat dari jarak yang ditempuh, beban yang dipindahkan, infrastruktur yang harus dilalui, dan lamanya waktu yang harus ditempuh. Salah satu jenis transportasi yang umum digunakan untuk menempuh jarak yang relatif jauh dalam waktu yang singkat adalah transportasi via udara, baik menggunakan pesawat terbang maupun helikopter.
1.2TUJUAN PENELITIAN
Skripsi ini disusun untuk memenuhi beberapa tujuan yang diharapkan, yaitu:
1. Dapat membuat sebuah program yang dapat diaplikasikan pada helikopter mainan untuk dapat mendarat secara otomatis saat tidak ada koneksi dari radio kontrol.
2. Dapat menggunakan sensor ping ultrasonik sebagai sensor jarak yang menjadi input pada mikrokontroler sehingga helikopter dapat mendarat dengan baik. 3. Merealisasikan prinsip kerja sensor dan penggunaannya pada mikrokontroler
sesuai yang dipelajari dalam perkuliahan.
4. Mengintegrasikan program (software) sebagai driver dalam sebuah IC (chip) Mikrokontroler yang proses eksekusinya tergantung dari nilai input dari pemancar dan dari sensor terhadap keadaan luar, sehingga alat dapat bekerja sesuai program.
1.3BATASAN MASALAH
Pembatasan masalah dalam penyusunan skripsi ini hanya mencakup masalah-masalah sebagai berikut:
1. Radio kontrol hanya digunakan untuk kendali helikopter mainan secara manual dan proses perpindahan kendali (over control) hanya terjadi saat koneksi radio terputus (lost control). Pengontrolan dari mikrokontroler (pendaratan otomatis) akan terputus/ atau dibatalkan bila koneksi dari radio tersambung kembali.
2. Penggunaan sensor hanya digunakan saat terjadi over control untuk mengetahui keadaan landasan helikopter sehingga mikrokontroler dapat mengatur putaran baling-baling (RPM) yang sesuai dengan ketinggian.
1.4MANFAAT PENELITIAN
Terdapat dua manfaat dari pelaksanaan skripsi ini,yaitu yang bersifat umum dan khusus:
1. Manfaat secara umum
Simulasi ini dapat untuk menghindari kerusakan pada helikopter mainan yang hilang komunikasi antara pemancar dan penerima.
2. Manfaat secara khusus
Dengan pelaksanaan skripsi ini penulis dapat mengembangkan dan mengaplikasikan sebagian ilmu yang dipelajari saat perkuliahan.
1.5SISTEMATIKA PENULISAN
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika penulisan dalam skripsi ini sebagai berikut:
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penelitian, batasan masalah, manfaat penelitian serta sistematika penulisan.
BAB II. TEORI DASAR DAN PENDUKUNG
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan dalam pembahasan. Teori pendukung itu antara lain
mikrokontroller Atmega 8, Ping Ultrasonik, Penggunaan dan setting pada software Codevision.
BAB III. RANCANGAN SISTEM
Pada bab ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroller Atmega 8.
BAB IV. PENGUJIAN ALAT DAN PROGRAM
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang dilakukan dari skripsi ini serta saran yang ditujukan demi perbaikan dan kesempurnaan kedepannya.
BAB II
TEORI DASAR DAN PENDUKUNG
2.1 Metode Pendaratan Helikopter Tanpa Awak
Kebanyakan penelitian sistem pendaratan darurat pada helikopter dilakukan oleh perusahaan pembuatnya dan terdapat beberapa metode yang digunakan perusahan-perusahaan tersebut, diantaranya menggunakan Gelombang Radio, Pengolahan Citra (Image Processing) dan Estimasi Posisi (GPS).
2.1.1 Radar (Radio Detection and Ranging)
2.1.2 Pengolahan Citra (Visual Landmarks)
Gambar yang didapatkan kamera berupa 2 dimensi diproses menjadi nilai atau informasi dengan mengubah gambar tersebut dengan mengubah nilai-nilai pada gambar tersebut baik dalam cahaya, warna dan resolusi gambar tersebut, lalu dilakukan pendekatan kemiripan, pada Helipad (Landasan Helikopter) diberi tanda huruf “H” sehingga driver helikopter tahu dimana posisi landasan, sehinga gambar yang dihasilkan menjadi titik acuan helikopter untuk mendarat(2).
Berdasarkan tujuan transformasi operasi pengolahan citra dikategorikan sebagai berikut(3) :
Peningkatan Kualitas Citra (Image Enhancement)
Operasi peningkatan kualitas citra bertujuan untuk meningkatkan fitur tertentu pada citra.
Pemulihan Citra (Image Restoration)
Operasi pemulihan citra bertujuan untuk mengembalikan kondisi citra pada kondisi yang diketahui sebelumnya akibat adanya pengganggu yang menyebabkan penurunan kualitas citra.
Berdasarkan cakupan operasi yang dilakukan terhadap citra, Operasi pengolahan citra dikategorikan sebagai berikut :
Operasi titik, yaitu operasi yang dilakukan terhadap setiap piksel pada citra yang keluarannya hanya ditentukan oleh nilai piksel itu sendiri.
Operasi area, yaitu operasi yang dilakukan terhadap setiap piksel pada citra yang keluarannya dipengaruhi oleh piksel tersebut dan piksel lainnya dalam suatu daerah tertentu. Salah satu contoh dari operasi berbasis area adalah operasi ketetanggaan yang nilai keluaran dari operasi tersebut ditentukan oleh nilai piksel-piksel yang memiliki hubungan ketetanggaan dengan piksel yang sedang diolah.
2.1.3 Estimasi Posisi (Position Estimation)
Estimasi Posisi atau perkiraan posisi landasan ditentukan oleh pemetaan lokasi landasan yang ditangkap oleh penerima sinyal GPS (Global Positioning System) pada helikopter, sinyal yang dipancarkan oleh satelit diterima oleh penerima dan penerima mengirimkan posisi koordinat penerima. Tidak seperti radar, metode ini dapat mengarahkan helikopter kelokasi yang diinginkan tanpa bantuan operator.
2.1.3.1Cara Kerja GPS
Seperti namanya, bagian ini untuk mengontrol. Setiap satelit dapat berada sedikit diluar orbit, sehingga bagian ini melacak orbit satelit, lokasi, ketinggian, dan kecepatan. Sinyal-sinyal sari satelit diterima oleh bagian kontrol, dikoreksi, dan dikirimkan kembali ke satelit. Koreksi data lokasi yang tepat dari satelit ini disebut dengan data ephemeris, yang nantinya akan di kirimkan kepada alat navigasi kita.
Bagian Angkasa
dalam penghitungan. Kekuatan sinyal ini lebih dipengaruhi oleh lokasi satelit, sebuah alat akan menerima sinyal lebih kuat dari satelit yang berada tepat diatasnya (bayangkan lokasi satelit seperti posisi matahari ketika jam 12 siang) dibandingkan dengan satelit yang berada di garis cakrawala (bayangkan lokasi satelit seperti posisi matahari terbenam/terbit).
Ada dua jenis gelombang yang saat ini dipakai untuk alat navigasi berbasis satelit pada umumnya, yang pertama lebih dikenal dengan sebutan L1 pada 1575.42 MHz. Sinyal L1 ini yang akan diterima oleh alat navigasi. Satelit juga mengeluarkan gelombang L2 pada frekuensi 1227.6 Mhz. Gelombang L2 ini digunakan untuk tujuan militer dan bukan untuk umum.
Bagian Pengguna
Bagian ini terdiri dari alat navigasi yang digunakan. Satelit akan memancarkan data almanak dan ephemeris yang akan diterima oleh alat navigasi secara teratur. Data almanak berisikan perkiraan lokasi (approximate location) satelit yang dipancarkan terus menerus oleh satelit. Data ephemeris dipancarkan oleh satelit, dan valid untuk sekitar 4-6 jam. Untuk menunjukkan koordinat sebuah titik (dua dimensi), alat navigasi memerlukan paling sedikit sinyal dari 3 buah satelit. Untuk menunjukkan data ketinggian sebuah titik (tiga dimensi), diperlukan tambahan sinyal dari 1 buah satelit lagi.
Dari sinyal-sinyal yang dipancarkan oleh kumpulan satelit tersebut, alat navigasi akan melakukan perhitungan-perhitungan, dan hasil akhirnya adalah koordinat posisi alat tersebut. Makin banyak jumlah sinyal satelit yang diterima oleh sebuah alat, akan membuat alat tersebut menghitung koordinat posisinya dengan lebih tepat.
2.2 Mikrokontroler ATMega8
digunakan adalah AVR ATMega8, perbedaannya dengan AVR ATMega8L hanyalah terletak pada besarnya tegangan yang diperlukan untuk bekerja. Untuk ATMega8 tipe L dapat bekerja pada tegangan antara 2,7V – 5,5V sedangkan untuk ATMega8 hanya dapat bekerja pada tegangan 4,5V – 5,5V.
Kelebihan dari ATMega8 sehingga digunakan sebagai kontrol utama adalah sebagai berikut :
Mempunyai performa yang tinggi (berkecepatan akses maksimum 16MHz) dan hemat daya
Memori untuk program flash cukup besar yaitu 8K Byte Memori internal SRAM sebesar 1K Byte
EEPROM sebesar 512 byte yang dapat diprogram saat operasi Port komunikasi SPI
Komunikasi serial standar USART Tersedia 3 chanel PWM
Tersedia 3 chanel timer/counter (2 untuk 8 bits dan 1 untuk 16 bits)
Berikut adalah gambar dari blok diagram untuk ATMega8.
ATMega8 memiliki 28 pin yang masing-masing pin-nya memiliki fungsi yang berbeda-beda baik sebagai port ataupun sebagai fungsi yang lain. Berikut akan dijelaskan tentang kegunaan dari masing-masing kaki pada ATMega8.
VCC
Merupakan supply tegangan untuk digital.
GND
Merupakan ground untuk semua komponen yang membutuhkan grounding.
Port B
Di dalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah 8 buah pin mulai dari pin B.0 sampai dengan pin B.7. Tiap pin dapat digunakan sebagai
input dan juga output. Port B merupakan sebuah 8-bit bi-directional I/O port dengan
internal pull-up resistor. Sebagai input, pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Jika ingin menggunakan tambahan kristal, maka cukup menghubungkan kaki dari kristal ke kaki pada pin port B. Namun jika tidak digunakan, maka cukup dibiarkan saja. Penggunaan kegunaan dari masing-masing kaki ditentukan dari clock fuse setting-nya.
Port C
Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam masing-masing
pin terdapat pull-up resistor. Jumlah pin-nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran / output, port C memiliki karakteristik yang sama dalam hal kemampuan menyerap arus (sink) ataupun mengeluarkan arus (source) dan juga berfungsi sebagai input ADC (Analog to Digital Converter).
Reset / PC6
rendah dan pulsa yang ada lebih pendek dari pulsa minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja.
Port D
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari
port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat
kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
AVCC
Pada pin ini memiliki fungsi sebagai supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan, tetap saja disarankan untuk menghubungkan secara terpisah dengan VCC. Cara menghubungkan AVCC adalah melewati low-pass filter setelah itu dihubungkan dengan VCC.
AREF
Gambar 2.2. Blok Diagram ATMega8
ALU (Arithmetic Logic Unit). Hal tersebut seeprti yang telah tertulis dalam datasheet khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang kebutuhan penggunaan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar Status Register.
Gambar 2.3. Status Register ATMega8
Akan dijelaskan kegunaan dari masing-masing bit yang terlihat di atas :
Bit 7 (I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan diabaikan. Bit ini akan dibersihkan atau
cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali
oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi dengan instruksi SEI dan CLI.
Bit 6 (T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit LoaD) and BST
(Bit STore) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah
Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD.
Bit 4 (S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif di antara Negative Flag
(N) dan Two’s Complement Overflow Flag (V). S = N ⊕ V.
Bit 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
Bit 2 (N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di dalam sebuah fungsi logika atau aritmatika.
Bit 1 (Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “0” dalam sebuah fungsi aritmatika atau logika.
Bit 0 (C)
2.3 SENSOR ULTRASONIK
Ultrasonik, sebutan untuk jenis suara diatas batas suara yang bisa didengar manusia. Seperti diketahui, telinga manusia hanya bisa mendengar suara dengan frekuensi 20 Hz sampai 20KHz. Lebih dari itu hanya beberapa jenis binatang yang mampu mendengarnya, seperti kelelawar dan lumba-lumba. Lumba-lumba bahkan memanfaatkan ultrasonik untuk mengindera benda-benda di laut. Prinsip ini kemudian ditiru oleh sistem pengindera kapal selam. Dengan cara mengirimkan sebuah suara dan mengitung lamanya pantulan suara tersebut maka dapat diketahui jarak kapal selam dengan benda tersebut. Mula-mula suara dibunyikan, kemudian dihitung lama waktu sampai terdengar suara pantulan. Jarak dapat dihitung dengan mengalikan kecepatan suara dengan waktu pantulan. Kemudian hasilnya dibagi 2. Misalnya lama waktu pantulan adalah 1 detik, maka jaraknya adalah (344,424m/detik x 1 detik)/2 = 172m.
Ping Ultrasonic Range Finder, adalah modul pengukur jarak dengan ultrasonic buatan Parallax Inc. yang didesain khusus untuk teknologi robotika. Dengan ukurannya yang cukup kecil (2,1cm x 4,5cm), sensor ini dapat mengukur jarak antara 3 cm sampai 300 cm. Keluaran dari Ping berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 uS sampai 18,5 mS.
Gambar2.6. Ping Parallax Ultrasonic Range Finder
Pada dasanya, Ping terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Pada modul Ping terdapat 3 pin yang digunakan untuk jalur power
tersebut. Ping))) hanya akan mengirimkan suara ultrasonik ketika ada pulsa trigger dari mikrokontroler (Pulsa high selama 5uS). Suara ultrasonik dengan frekuensi sebesar 40KHz akan dipancarkan selama 200uS. Suara ini akan merambat di udara dengan kecepatan 344.424m/detik (atau 1cm setiap 29.034uS), mengenai objek untuk kemudian terpantul kembali ke Ping. Selama menunggu pantulan, Ping akan menghasilkan sebuah pulsa. Pulsa ini akan berhenti (low) ketika suara pantulan terdeteksi oleh Ping. Oleh karena itulah lebar pulsa tersebut dapat merepresentasikan jarak antara ping dengan objek. Selanjutnya mikrokontroler cukup mengukur lebar pulsa tersebut dan mengkonversinya dalam bentuk jarak dengan perhitungan sebagai berikut
Jarak = (Lebar Pulsa/29.034uS) /2 (dalam cm) atau Jarak = (Lebar Pulsa x 0.034442) /2 (dalam cm)
Karena 1/29.034 = 0.34442
Gambar 2.7 Pulsa Ping Parallax Ultrasonic Range Finder
Satu hal yang perlu diperhatikan adalah bahwa ping tidak dapat mengukur objek yang permukaannya dapat menyerap suara, seperti busa atau sound damper lainnya. Pengukuran jarak juga akan kacau jika permukaan objek bergerigi dengan sudut tajam (meruncing).
2.4 Pemancar dan Penerima (Transmitter and Receiver)
via satelit luar angkasa. Pemancar merupakan perangkat yang mengubah pengukuran dari sensor menjadi sinyal elektromagnetik, dan mengirimkannya melalui antena sehingga dapat diterima oleh perangkat penerima. Sebuah penerima mengkonversi sinyal dari antena radio ke bentuk yang dapat digunakan. Menggunakan penyaring data (data filtering) dengan menggunakan IC untuk memisahkan data yang dikirim dari pembawa sinyal (carrier) dan derau (noise), dan dengan beberapa penguat (amplifier), kualitas data tersebut dapat dikembalikan seperti data yang asli, beberapa proses tersebut lebih dikenal dengan istilah demodulasi dan decoding.
2.5 Pengontrol Kecepatan (Speed Controller)
Speed Controller atau pengontrol kecepatan merupakan sinyal atau tegangan yang dapat mengatur kecepatan putaran motor listrik, arah dan bisa juga sebagai rem dinamis, Speed Controller biasanya diaplikasikan pada driver motor yang tersusun dari beberapa transistor atau lebih dikenal dengan istilah H-Bride. Salah satu jenis
Speed Controller yang biasa digunakan dalam pengendalian motor dc pada robot
adalah Pwm (Pulse width modulation) yang merupakan tegangan keluaran dari mikrokontroler berupa gelombang kotak (pulse), bila nilai frekuensi tegangan pwm pada mikrokontroller dinaikkan maka kecepatan putaran pada motor akan bertambah.
2.6 Giroskop (Gyroscope)
2.7 CodeVisionAVR COMPILER
Pemrograman Bahasa C untuk AVR digunakan untuk pemrograman berbagai jenis perangkat, termasuk mikrokontroler. Bahasa ini sudah merupakan high level language, dimana memudahkan programmer menuangkan algoritmanya.
Aplikasi CodeVision AVR C Compiler :
Klik File -> New muncul seperti gambar di bawah ini
NB: Untuk Chip dan Clock sesuaikan dengan yang anda gunakan Simpan sesuai nama yang anda inginkan
Example : ach.c (untuk file source C) ach.prj (untuk file project)
BAB III
PERANCANGAN ALAT DAN PROGRAM
3.1 Diagram Blok
Secara garis besar, diagram blok Simulasi Pendaratan Helikoter Mainan ditunjukkan pada gambar berikut ini :
Gambar 3.1 Diagram Blok Rangkaian
Pada gambar diatas fungsi mikrokontroler hanya melewatkan data dari penerima pada speed controller dan gyroscope disaat koneksi dari pemancar dan penerima masih tersambung, dan saat koneksi dari pemancar terputus maka mikrokontroler mengambil alih sistem navigasi helikopter.
Pemancar Radio Kontrol (Transmitter)
Penerima
(Receiver) Mikrokontroler
Electronic Gyroscope
Sensor
Cara kerja dan fungsi masing-masing tiap blok adalah:
1. Radio kontrol pada gambar diatas hanyalah navigator arah dan ketinggian helikopter secara manual yang menggunakan gelombang radio sebagai media komunikasinya.
2. Sensor Ping Ultrasonik berfungsi sebagai acuan jarak antara helikopter dan landasan.
3. Electronic gyroscope adalah perbandingan putaran baling-baling atas dan
baling-baling bawah untuk arah helikopter (kanan atau kiri, sehingga perbedaan putaran yang akan menentukan posisi helikopter, dan saat banyaknya putaran baling-baling utama (atas dan bawah) sama maka posisi helikopter akan cenderung diam secara horizontal (badan helikopter tidak berputar terhadap baling baling), gyroscope akan bekerja sesuai dengan input yang diberikan speed controller .
4. Speed controller adalah nilai output tegangan pwm yang menentukan
ketinggian helikopter (putaran baling-baling atas harus sama dengan putaran baling-baling bawah), dan arah badan helikopter (putaran baling-baling atas berbeda dengan putaran baling-baling bawah) , dan input pada baling-baling ekor untuk maju atau mundur dalam tiap menitnya (RPM-Revolution Per Minutes) yang menentukan ketinggian dan arah pergerakan helikoter.
3.2 Rangkaian Regulator
Agar rangkaian dapat bekerja, maka dibutuhkan sumber tegangan. Pada perancangan ini dibutuhkan sumber tegangan yang konstan, yaitu (+) 5 volt DC, yang digunakan untuk mensupply tegangan ke IC ATMega 8 dan sensor ping ultrasonik. Rangkaian tampak seperti gambar di bawah ini:
Gambar 3.2 Rangkaian Regulator
3.3. Perancangan Rangkaian Mikrokontroler ATMega 8
Rangkaian ini berfungsi untuk mengendalikan seluruh sistem. Komponen utama dari rangkaian ini adalah IC mikrokontroler ATMega 8. Pada IC ini program diisi sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Mikrokontroler ini memiliki 24 port I/O, yaitu port B, port C dan port D. Pin 23 sampai 28 adalah Port C yang merupakan port ADC, dimana port ini dapat menerima data analog. Untuk supply tegangan Pin 7 dihubungkan ke sumber tegangan 5 volt sedangkan pin 8 dan pin 22 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal sebagai sumber clocknya pada pin 9 dan pin 10. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
3.4 Baterai
Besar yang digunakan adalah baterai Lithium-Ion dengan tegangan 7.4volt dan arus 1500mAh yang dapat kita lihat pada gambar 3.4.
Gambar 3.4 Baterai Lithium-Ion
3.5 Rangkaian Sensor Jarak (PING)
Sensor jarak yang digunakan adalah sensor PING ultrasonic. Sensor ini dapat mengukur jarak hingga 3 meter, sensor ini menggunakan motode pemancaran dan penerimaan sinyal suara ultrasonic. Gambar sensor jarak PING ditunjukkan pada gambar 2.6.
3.6 Helikopter
Helikopter yang digunakan untuk proyek ini adalah tipe Double Horse Volitation 9053 Metal Electric RC Helicopter yang memiliki dua baling-baling pada kepala helikopter ( untuk mengatur ketinggian dan arah helikopter) dan baling-baling pada ekor helikopter (untuk pergerakan maju atau mundur).
3.6.1 Gyroscope dan Speed controller
Gambar 3.5 Baling-baling utama helikopter
Pada gambar diatas kita dapat melihat bahwa terdapat dua baling-baling utama (Double-Blade) yang digunakan sebagai giroskop elektronik, dan baling-baling ekor pada gambar dibawah yang berfungsi sebagai tenaga pendorong helikopter (untuk maju atau mundur saat diudara).
3.6.2 Pemancar (Transmitter)
Pemancar yang digunakan merupakan pemancar radio (radio remote control) yang beroperasi pada frekuensi 49 MHz terdiri dari beberapa tombol navigasi yang menjadi input arah dan ketinggian helikopter.
Gambar 3.7 Pemancar radio kontrol
3.6.3 Penerima (Receiver)
Pada modul penerima telah terdapat juga driver motor untuk baling-baling utama dan baling-baling ekor. Modul penerima beroperasi pada frekuensi 49 MHz yang dapat kita lihat pada gambar 3.8.
3.7Perancangan Program
Diagram alir pemrogramannya adalah sebagai berikut :
Ket : A = Sensor Ping Ultrasonik di sisi kiri helicopter
B = Sensor Ping Ultrasonik di sisi kanan helicopter
Keterangan:
1. Start : Memulai Program.
2. Inisialisasi : Menentukan nilai-nilai input yang digunakan.
3. Cek komunikasi : Sistem mengecek komunikasi pada penerima.
4. Koneksi terputus ? : Ya, hanya berfungsi saat helikopter berada di udara (Belum/Tidak mendarat), karena pengendalian dapat dilakukan radio kontrol bila koneksi antara pemancar dan penerima tidak terputus (baik udara maupun darat).
5. Pengendalian otomatis oleh mikrokontroler : Mikrokontroler mengambil alih sistem navigasi untuk mendaratkan helikopter.
6. Sisa B
A≤ 2cm?
: Untuk Mengetahui sisa hasil pembagian jarak antara sensor
A terhadap sensor B. Jika ya, maka lanjutkan ke proses berikutnya, namun bila tidak maka mikrokontroller akan memberi perintah untuk membelokkan helikopter ke kiri.
7. Sisa A B
≤ 2cm? : Untuk Mengetahui sisa hasil pembagian jarak antara sensor B
terhadap sensor A. Jika ya, maka lanjutkan ke proses berikutnya, namun bila tidak maka mikrokontroller akan memberi perintah untuk membelokkan helikopter ke kanan.
8. Kurangi RPM Baling-baling Helikopter : Pengurangan cepatnya putaran baling-baling (RPM) untuk medaratkan helikopter.
9. Jarak A atau B ≤ 1cm ? : Merupakan jarak antara masing-masing sensor terhadap landasan. Jika ya, maka mikrokontroler akan menghentikan semua proses, jika tidak maka akan kembali pada proses pengukuran jarak sensor terhadap landasan.
BAB IV
PENGUJIAN ALAT DAN PROGRAM
Pada bab ini, akan dibahas pengujian alat mulai dari pengujian alat permodul sampai pengujian alat secara keseluruhan. Pengujian tersebut akan dilakukan secara bertahap dengan urutan sebagai berikut:
a. Pengujian masing-masing blok b. Pengujian sistem secara keseluruhan
4.1 Pengujian Mikrokontroller ATMEGA8
Untuk mengetahui apakah rangkaian mikrokontroller bekerja dengan baik, maka dilakukan pengujian. Pengujian pada bagian ini dilakukan dengan memberikan program pada mikrontroller. Programnya adalah sebagai berikut :
/***************************************************** Project : Test ATmega8
Version : Bab IV Date : 04/09/2011
// Declare your global variables here void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization // Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0xFF;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0xFF;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0xFF;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped TCCR0=0x00;
TCNT0=0x00;
// Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// Analog Comparator initialization // Analog Comparator: Off
4.2. Pengujian Speed Controller dan Electronic Gyroscope
Untuk mengetahui kinerja speed controller (PWM) dan input gyroscope bekerja dengan baik, maka dilakukan pengujian. Pengujian pada bagian ini dilakukan dengan memberikan program pada mikrontroller. Programnya adalah sebagai berikut :
/***************************************************** Project : Speed controller (PWM) & Gyroscope
Version : Bab IV Date : 04/09/2011
Author : Freeware, for evaluation and non-commercial use only Company : FMIPA USU
// Alphanumeric LCD Module functions #asm
.equ __lcd_port=0x12 ;PORTD #endasm
#include <lcd.h> #include <delay.h>
// Declare your global variables here void main(void)
// Declare your local variables here Unsigned char i;
// Input/Output Ports initialization
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=Out Func1=Out Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=0 State1=0 State0=T PORTB=0x00;
DDRB=0x06;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped TCCR0=0x00;
TCNT0=0x00;
// OC1A output: Non-Inv. // OC1B output: Non-Inv. // Noise Canceler: Off
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
Jika program tersebut dijalankan, maka tegangan pada pin 16 atau pin 17 akan naik dari 0 Volt s/d 5 Volt dan turun dari 5 Volt s/d 0 Volt terhadap ground secara bergantian, dengan demikian maka speed controller dan gyroscope telah bekerja dengan baik.
4.3. Pengujian Rangkaian Sensor Ping Ultrasonik
Untuk mengetahui apakah sensor ini berjalan dengan baik, maka dilakukan pengujian dengan menghubungkan kedua sensor ping ultrasonik pada rangkaian ATMega8 dan memberikan program pada IC Mikrokontroller. Programnya adalah sebagai berikut:
/***************************************************** Project : Ping Ultrasonic Test
Version : Bab IV Date : 12/10/2011
Author : Freeware, for evaluation and non-commercial use only Company : FMIPA USU
// Alphanumeric LCD Module functions #asm
#endasm
void main(void) {
// Declare your local variables here // Input/Output Ports initialization // Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=Out Func1=Out Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=0 State1=0 State0=T PORTB=0x00;
DDRB=0x06;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: 1500,000 kHz // Mode: Fast PWM top=00FFh // OC1A output: Non-Inv. // OC1B output: Non-Inv. // Noise Canceler: Off
// Timer 1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0xA1; // Clock source: System Clock // Clock value: Timer 2 Stopped // Mode: Normal top=FFh
SFIOR=0x00;
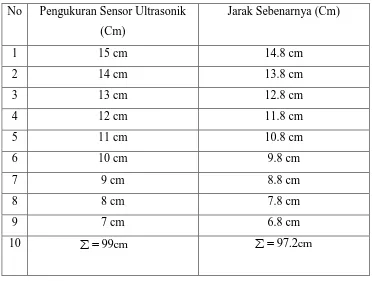
Setelah program tersebut dijalankan, maka dilakukan pengukuran terhadap jarak yang nyata sehingga didapatkan data sebagai berikut :
Tabel 4.1 Pengukuran Jarak Sensor Ultrasonik
No Pengukuran Sensor Ultrasonik (Cm)
% tingkat kesalahan rata-rata =
Maka besar tingkat kesalahannya adalah 1.851 %, namun dengan demikian kita dapat mengetahui bahwa modul sensor telah bekerja dengan baik.
4.4 Pengujian Pemancar dan Pembacaan Tegangan Pada Modul Penerima Langkah pengujian sebagai berikut :
a. Menghubungkan modul penerima dengan modul ATMega8 dan catu daya b. Mencatat hasil pengukuran tegangan.
Tabel 4.2 Pengukuran Tegangan pada Modul Penerima No Kondisi Radio Kontrol V pada Modul Penerima
(Volt)
Tampilan Pada LCD
1 ON 0.33 143
2 OFF 0.24 92
Tegangan pada modul penerima “0.33 volt” merupakan nilai tegangan saat kondisi pemancar aktif (on) dan “0.24 volt” merupakan nilai tegangan saat kondisi pemancar dinonaktifkan (off). Angka “143” dan “92” merupakan hasil konversi nilai tegangan menjadi biner pada ADC (Analog to Digital Converter) oleh mikrokontroler yang ditampilkan oleh LCD.
Tabel 4.3 Pengukuran pengaruh Tegangan terhadap jarak pemancar No. Jarak Pemacar dari
Besarnya nilai tegangan yang terukur dipengaruhi jarak antara pemancar dan modul penerima, dari tabel 4.2 kita dapat melihat bahwa besar tegangan saat kondisi “ON” adalah 0.33 volt dan saat kondisi “OFF” adalah 0.24 volt, namun saat pengukuran dengan pengaruh jarak antara pemancar dan penerima terdapat variabel tegangan yang berada diantara posisi ON, OFF dan dibawah tegangan OFF, pada tabel 4.3 kita dapat melihat bahwa tegangan pemancar dikatakan OFF bila jarak lebih dari 25 meter, karena besar tegangan saat kondisi OFF adalah 0.24 volt. Dari pengukuran tersebut dapat disimpulkan bahwa pada saat jarak antara pemancar dan penerima lebih dari 25 meter, helikopter akan mendarat secara otomatis.
Tegangan output dari modul penerima berupa PWM (pulse witdh modulation) yang tidak dapat dibaca mikrokontroler secara sempurna melalui ADC(Analog to Digital Converter), sehingga dibutuhkan rangkaian PWM to Analog Converter (PAC) agar mikrokontroller dapat membaca tegangan pada modul penerima (gambar 4.1).
Gambar 4.1 Rangkaian PAC
Tabel 4.4 Pengukuran Tegangan Input Driver pada Modul Penerima
Terdapat pengurangan tegangan (Voltage Reduction) dengan digunakannya rangkaian PAC. Tegangan yang berkurang sekitar 87% dari tegangan setelah rangkaian PAC, yang didapatkan dengan metode pengambilan sampel (sampling) , dengan formula :
r eduction
Sehingga dapat ditarik kesimpulan bahwa besarnya tegangan yang berkurang sekitar 87% dari tegangan V(in) setelah rangkaian PAC.Tampilan nilai pada Lcd setelah
rangkaian PAC merupakan hasil konversi tegangan menjadi nilai biner pada ADC oleh mikrokontroler, yang nantinya menjadi nilai acuan PWM pada mikrokontroler.
Tegangan yang dihasilkan pada modul penerima yang sebelumnya menjadi acuan cepatnya putaran motor pada helikopter (RPM), dan mikrokontroller harus dapat mereplika nilai-nilai dan perubahan pada tegangan tersebut, sehingga input tegangan (PWM) pada modul penerima dapat sama dengan output tegangan pada mikrokontroller (PWM) yang menjadi acuan baru pada cepatnya putaran motor pada helikopter (RPM).
Tabel 4.5 Perbandingan V(in) Modul Penerima – V(out) pada Mikrokontroler No. V(in) Modul Penerima
Perbedaan nilai tegangan yang dihasilkan mikrokontroller (V(out)) terhadap nilai
acuan cepatnya putaran pada baling-baling utama helikopter, dalam pengukuran ini terjadi perubahan nilai tegangan dari tegangan input yang lebih kecil dibandingkan tegangan output, nilai pada Lcd menjadi acuan tegangan replika pada mikrokontroler (PWM).
4.4 Pengujian Rangkaian Keseluruhan dan Pengoperasian Alat
Untuk menguji rangkaian keseluruhan maka IC Mikrokontroler harus diisi dengan program keseluruhan yang terdapat pada lampiran di akhir laporan. Pengoperasian alat dilakukan dalam dua tahap untuk membandingkan hasil kinerja alat tanpa dan menggunakan rangkaian ATMega8.
1. Pengoperasian tanpa rangkaian ATMega8 terhubung pada modul penerima.
Helikopter diterbangkan dengan ketinggian 1-2 meter dan saat helikopter dalam posisi stabil, kemudian pemancar dinonaktifkan.
2. Pengoperasian dengan rangkaian ATMega8 terhubung pada modul penerima.
Helikopter diterbangkan dengan ketinggian 1-2 meter dan saat helikopter dalam posisi stabil, kemudian pemancar dinonaktifkan.
4.4.1 Hasil Pengoperasian
Helikopter yang dioperasikan tanpa terhubung dengan rangkaian ATMega8 terjatuh dengan tiba-tiba, sehingga dapat merusak helikopter tersebut. Tetapi, helikopter yang dioperasikan dengan rangkaian ATMega8 yang terhubung dengan modul penerima akan mendarat secara otomatis pada landasan yang datar. Video dapat dilihat pada alamat: http://www.youtube.com/watch?v=wUn1IbBwAfI
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Alat ini telah bekerja sesuai dengan yang diinginkan dengan memanfaatkan mikrokontroler ATMega8 sebagai kontrol utama secara otomatis untuk pendaratan saat komunikasi helikopter dengan pemancar terputus.
2. Fungsi sensor jarak ping ultrasonik disini sebagai sensor yang memberikan output pada mikrokontroler dalam menentukan bagaimana dan dimana infrastruktur tempat helikopter mendarat .
3. Simulasi pendaratan darurat pada helikopter mainan ini dapat mendarat dengan baik bila dilakukan saat tidak ada angin atau dalam ruangan, karena angin berpengaruh saat proses pendaratan.
5.2 Saran
1. Sebaiknya alat ini dapat dikembangkan lagi, karena kita dapat menambahkan fitur lainnya seperti penggunaan giroskop elektronik ADXL 345 yang dapat menyesuaikan kesetimbangan posisi helikopter.
2. Percobaan untuk pengembangan pendaratan alat ini sebaiknya dilakukan dengan helikopter yang daya angkatnya lebih besar sehingga beban sensor dan mikrokontroller tidak begitu mempengaruhi proses pendaratan.
DAFTAR PUSTAKA
Agus Bejo. 2008. “C&AVR Rahasia Kemudahan Bahasa C dalam
Mikrokontroler ATMega8535”, Graha Ilmu
Ardi Winoto. 2008. “Mikrokontroler AVR ATmega8/16/32/8535 dan
Pemrogramannya dengan bahasa C pada WinAVR”, Bandung:
Informatika Bandung
Atmel. 2006. “ATMEGA8/ATMEGA8L, 8-bit AVR with 8 Kbytes in System Programable Flash”. www.atmel.com/literatur
Dayat Kurniawan. 2009. “ATMEGA 8 dan Aplikasinya”. Jakarta: Gramedia Heri Andrianto.2008. “Pemrograman Mikrokontroler AVR ATmega16
Menggunakan Bahasa C [CodeVision AVR]”, Bandung: Informatika
Bandung
Iwan Setiawan, ST, M.T. 2008. “Tutorial Microcontroller AVR Part I”, UNDIP: Elektro
2. Srikanth Saripalli, Jasmes Montgomery, and Gaurav Sukhatme, “
Vision-based Autonomous Landing of an Unmanned Aerial Vehicle”, in
proceedings of the IEEE International Conference and Robotics and Automation, May 2002.
LAMPIRAN A
LAMPIRAN B
Program Pada Mikrokontroler
/***************************************************** Project : Unmanned Helicopter Automatic Landing
Version : ATMega Date : 01/11/2011
Author : Freeware, for evaluation and non-commercial use only Company : S1 Fisika Instrument FMIPA USU
Comments:
Chip type : ATmega8 Program type : Application Clock frequency : 12,000000 MHz Memory model : Small
External RAM size : 0 Data Stack size : 256
*****************************************************/
#include <mega8.h> #include <delay.h>
#define ekora PORTD.6=0 #define ekorb PORTD.7=0
#define pulse1 PORTC.4 // untuk sensor ping ultrasonik #define echo1 PINC.4
#define arah1 DDRC.4 #define out1 1
#define inp1 0
#define echo2 PINC.5
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
// Wait for the AD conversion to complete while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10; return ADCW; }
// Declare your global variables here
PORTD.6=1;
// Declare your local variables here
// Input/Output Ports initialization // Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=Out Func1=Out Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=0 State1=0 State0=T PORTB=0x00;
DDRB=0x06;
// Port C initialization
PORTC=0x00; DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Fast PWM top=00FFh // OC1A output: Non-Inv. // OC1B output: Non-Inv. // Noise Canceler: Off
OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer 2 Stopped // Mode: Normal top=FFh
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 93,750 kHz
ADCSRA=0x87;
while (1) {
// Place your code here
jony(); smith(); sinambela();