KAJIAN EKSPERIMENTAL SUSUNAN POMPA SECARA
PARALEL TERHADAP KARAKTERISTIK VIBRASI
POMPA SENTRIFUGAL SATU TINGKAT
TESIS
Oleh
SURIADY SIHOMBING 047015015/TM
SEKOLAH PASCASARJANA
UNIVERSITAS SUMATRA UTARA
Judul Tesis : KAJIAN EKSPERIMENTAL SUSUNAN POMPA
SECARA PARALEL TERHADAP KARAKTERISTIK VIBRASI POMPA SENTRIFUGAL SATUTINGKAT Nama Mahasiswa : Suriady Sihombing
Nomor Pokok : 047015015 Program Studi : Teknik Mesin
Menyetujui
Komisi pembimbing
( Dr.Ing.Ikhwansyah Isranuri )
Ketua
( Ir. Tugiman ,MT ) ( Ir A.Halim Nasution,M.Sc )
Anggota Anggota
Ketua Program Studi, Direktur,
( Prof.Dr.Ir.Bustami Syam,MSME ) ( Prof.Dr.Ir.T Chairun Nisa B,MSc.)
Tanggal Lulus : 03 Maret 2008
Telah diuji pada
Tanggal 03 Maret 2008
PANITIA PENGUJI TESIS
Ketua : Dr.Ing.Ikhwansyah Isranuri Anggota : 1. Ir.Tugiman, MT
ABSTRAK
Tesis ini adalah merupakan laporan hasil penelitian eksperiment tentang pengaruh gaya beban yang diberikan dinamometer terhadap perilaku pompa sentrifugal satu tingkat yang tersusun secara parallel. Latar belakang tesis disebabkan beberapa gejala kegagalan pada unit Pompa yang diprediksi akibat getaran, temperatur dan keausan peralatan. Tujuannya untuk mendapatkan besar getaran yang terjadi pada pompa Sentrifugal yang disusun secara parallel dengan metode batas stabilitas getaran. Pompa yang dipergunakan dalam penelitian ini adalah jenis sentrifugal dengan head maksimum 30 m, kapasitas maksimum 5 liter/dt dan daya 1850 Watt. Pipa isap menggunakan pipa PVC, diameter pipa isap 2 inchi dengan panjang 0,86 m dan dilengkapi dengan katup dan manometer. Diameter pipa tekan 3 inchi dengan panjang 3,78 m yang dilengkapi dengan katup. manometer, dan flowmeter. Head static dari sistem 0,77 m dan head total sistem 3,9 m. Pengujian perilaku getaran dimulai dari pemberian beban gaya 2 kg, 2,2 kg, 2,4 kg, 2,6 kg, 2,8 kg dan diukur getaran yang timbul dengan vibrometer digital Hand HeldVibration meter 908 B. Titik pengukuran diambil delapan titik : pada landasan P-01, P-02, P-03, P-04, pada pompa 05, P-06, pada electromotor P-07, P-08, serta diukur dari arah aksial, vertikal dan horizontal. Dari hasil pengujian diperoleh bahwa getaran yang paling rendah terdapat pada Pompa titik P-06 dengan harga simpangan 27,5 x 10-6 m dan tertinggi pada electromotor titik P-07 dengan harga simpangan 170 x 10-6 m. Dari standartd ISO 10816-3 untuk velocity pada Pompa dengan harga rata-rata aksial 2,64 m/s; vertikal 0,795 m/s dan arah horizontal 1,39 m/s dikategorikan pada zona A berwarna hijau muda, getaran dari mesin baik dan dapat dioperasikan tanpa larangan. Semakin kecil head harga frekuensi semakin besar dan untuk kapasitas yang semakin besar maka harga frekuensi semakin besar.
Kata-kata kunci : Pompa sentrifugal paralel, Manometer, getaran, Dinamometer, Tachometer, Elektromotor dan landasan.
ABSTRACT
This research concerns about the result experimental of load force to give of dynamometer toward single stage centrifugal pump to in parallel operation. Centrifugal pump is used in this research with maximum head 30 m, maximum capacity 5 liter/sec and 1850 watt power. PVC pipes are used at suction pipes and discharge pipes. Diameter is 2 in and 0.86 m long, it is equipped with valve and manometer. Diameter of discharge pipes is 2 in with 3.78 m long, it is equipped with valve, manometer, and flowmeter. Static head is 0.77 m and 3.9 m total head of system. Vibration characteristic testing is started from force 2 kg, 2.2 kg, 2.4 kg, 2.6 kg, 2.8 kg. and responding of vibration is measured by vibrometer digital Hand Held Vibration meter 908B . Measured point are eight points : at base plate P-01, P-02, P-03, P-04 , at pump P-05, P-06, at electromotor P-07, P-08, and measured from axial, vertical and horizontal direction. The result of the research is found out that increase to give of load and head made increase vibration emerge. The highest displacement occurs in electromotor at P-07 point with displacement value 170 μm, and the lower displacement occurs in pump at P-06 point with displacement value 27.5 μm. The highest velocity occurs in base plate at P-04 point with velocity value 4.85 m/sec, the lower velocity occurs in pump at P-06 point with velocity value 0.10 m/sec. the highest acceleration occurs in base plate at P-04 point with acceleration value 6.85 m/sec2, the lower acceleration occurs in electromotor at P-08 point with acceleration Value 1.55 m/sec2. The smaller head is the higher value frequency and the higher capacity is the higher value frequency.
KATA PENGANTAR
Puji syukur ke hadirat Tuhan Yang Maha Esa,dengan berkat limpahan rahmat
dan karunia-Nya, penulis dapat menyelesaikan tesis ini dengan judul KAJI EKSPERIMENTAL KARAKTERISTIK VIBRASI POMPA PARALEL TERHADAP POMPA SENTRIFUGAL SATU TINGKAT .
Tesis ini dilakukan pada Pusat Riset Noise and Control Vibration departemen
Teknik Mesin Fakultas Teknik USU dan Laboratorium Pengujian Mesin Universitas
HKBP Nommensen Medan. Penulisan tesis ini terlaksana berkat bimbingan dan
arahan dari berbagai pihak terutama komisi pembimbing yang telah banyak
memberikan masukan dan saran demi kesempurnaan pelaksanaan penelitian.
Pada kesempatan ini penulis menyampaikan rasa terima kasih dan
penghargaan yang setinggi tingginya kepada Dr-Ing Ikhwansyah Isranuri dan Ir
Tugiman ,MT serta Ir. A Halim Nasution ,M.Sc selaku komisi pembimbing yang
telah memberikan petunjuk dalam menentukan langkah penelitian.
Ucapan terima kasih dan penghargaan juga ditujukan penulis kepada Prof.Dr.
Ir.Chairun Nisa B, M.Sc selaku direktur sekolah pascasarjana, Prof. Dr. Ir. Bustami
Syam, MSME selaku ketua program studi Magister Teknik Mesin SPs- USU yang
memberikan kesempatan dan fasilitas dalam menyelesaikan pendidikan pada program
studi Magister Teknik Mesin SPs-USU serta seluruh dosen dan staf administrasi
Program Studi Magister Teknik Mesin SPs – USU dan rekan rekan yang telah
memberikan tanggapan dan saran-saran perbaikan.
Penulis menyadari masih banyak ketidaksempurnaan dari penulisan proposal
tesis ini,oleh karena itu sangat diharapkan adanya kritik dan saran yang sifatnya
membangun.
Medan,10 Januari 2008
Penulis
Suriady Sihombing
RIWAYAT HIDUP
Data Pribadi
1. Nama : Suriady Sihombing
2. Tempat/Tgl lahir : P.Siantar, 30 Januari 1964
3. Pekerjaan : Dosen
4. Pangkat : IV-A
5. Jabatan : Kepala Laboratorium
6. Instansi : Univ. HKBP Nommensen
7. Alamat : Jl.Turi Gg. Parulian NO.156 Medan 20210
Telp. (061)7866695 HP. 08163137059
Pendidikan
Tahun
Masuk Tamat
Jenjang Pendidikan
1970 1976 Sekolah Dasar (SD) Taman Siswa P.Siantar
1976 1979 Sekolah Menegah Pertama (SMP) Taman.Siswa
P.Siantar
1979 1982 Sekolah Menegah Atas (SMA) Negeri 2 P.Siantar
1982 1987 Fakultas Teknik Jurusan Teknik Mesin Univ. HKBP
Nommensen
2005 2008 Sekolah Pascasarjana USU Prog.Magister Teknik Mesin
Riwayat Pekerjaan
No Pekerjaan Tahun
1 Kepala Lab. Metalurgi 1988-1992
2 Kepala Lab. Pengujian Mesin 1993-1995
3 Kepala Lab. Teknologi Mekanik 1996-1999
4 Kepala Lab. Fenomena Dasar 2000-2005
DAFTAR ISI
Halaman
ABSTRAK … ………. i
ABSTRACT ……….. ii
KATA PENGANTAR ………... iii
RIWAYAT HIDUP ……… v
DAFTAR ISI ………. vi
DAFTAR TABEL ………. viii
DAFTAR GAMBAR ………. x
DAFTAR LAMPIRAN ……….. xiv
DAFTAR ISTILAH ……… xv
BAB 1 PENDAHULUAN ……… …… 1
1.1 Latar Belakang ……… 1
1.2 Perumusan Masalah ………... 4
1.3 Tujuan Penelitian ……… 5
1.4 Manfaat Penelitian ………... 7
BAB 2 TINJAUAN PUSTAKA ……… 8
2.1 Vibrasi .. ……… …… 9
2.2 Pompa ……… …… 18
2.3 Kerangka Konsep ………. …… 23
BAB 3 METODE PENELITIAN ………. 26
3.1 Tempat Dan Waktu ……… … …….. 26
3.3 Variabel yang Diamati ………... 29
3.4 Teknik Pengukuran,Pengolahan Dan Analisa Data ………... 29
3.5 Pelaksanaan Penelitian ……… …….. 30
BAB 4 HASIL DAN PEMBAHASAN ……… 31
4.1 Pendahuluan ……… ……… 31
4.2 Pengukuran respon getaran pompa parallel pada gaya dinamometer 33
4.3 Perhitungan getaran pompa ………… 73
BAB 5 KESIMPULAN DAN SARAN ……… …. 111
DAFTAR PUSTAKA ……… . … 113
DAFTAR TABEL
Nomor Judul Halaman
4.1 Hasil Pengukuran Respon Getaran pada Landasan dengan F = 2 kg Pada P-01 ……… 32
4.2 Amplitudo pada F = 2 kg; P-01 ……… 35
4.3 Hasil Pengukuran Respon Getaran pada Landasan dengan F = 2 kg Pada P-02 ……… 39
4.4 Amplitudo pada F = 2 kg; P-02 ……… 40
4.5 Hasil Pengukuran Respon Getaran pada Landasan dengan F = 2 kg Pada P-03 ……… 43
4.6 Amplitudo pada F = 2 kg; P-03 ……… 44
4.7 Hasil Pengukuran Respon Getaran pada Landasan dengan F = 2 kg Pada P-04 ……… 47
4.8 Amplitudo pada F = 2 kg; P-04 ……… 48
4.9 Hasil Pengukuran Respon Getaran pada Pompa dengan F = 2 kg Pada P-05 ………. 51
4.10 Amplitudo pada F = 2 kg; P-05 ………. 52
4.11 Hasil Pengukuran Respon Getaran pada Pompa dengan F = 2 kg Pada P-06 ………. 54
4.12 Amplitudo pada F = 2 kg; P-06 ……….. 55
4.13 Hasil Pengukuran Respon Getaran pada Electromotor pd F = 2 kg; P-07.. 57
4.14 Amplitudo pada F = 2 kg; P-07 ……….. 58
4.15 Hasil Pengukuran Respon Getaran pada Electromotor pd F = 2 kg;P-08.. 60
4.16 Amplitudo pada F = 2 kg; P-08 ……….. 60
4.17 Spesifikasi Pompa ……… 73
4.19 Hasil Pengukuran pada Landasan dengan Gaya F = 2 kg pada P-02 … 84
4.20 Hubungan Head, Kapasitas, dan Putaran ……….. 94
4.21 Hasil Pengolahan Data Getaran untuk Base Plate (landasan) Mesin Pompa Sentrifugal pd Titik P-01, P-02, P-03, P-04 Kondisi Domain. .. 102
4.22 Hasil Perhitungan Kecepatan Sudut dan Amplitude Landasan Pompa Sentrifugal pada Frekuensi Domain . ……… 103
4.23 Hubungan Simpangan vs Frekuensi pada Titik P-01 ……..………… 104
4.24 Hubungan Kecepatan vs Frekuensi pada Titik P-01 ……….. 105
4.25 Hubungan Percepatan vs Frekuensi pada Titik P-01 ………. 106
4.26 Hasil Rata-Rata Rekapitulasi Data Perhitungan toori dari Empat titik pada Landasan Kondisi Frekuensi Domain …………. 107
4.27 Hasil Rata-Rata Rekapitulasi Data Pengukuran Empat titik di Landasan Pada Kondisi Frekuensi Domain ……… 107
4.28 Perubahan persentase hasil pengukuran dengan perhitungasn teori … 108
4.29 Hubungan Head, Kapasitas terhadap Displacement, Velocity,
Acceleration pada Pompa P-05 dan Pompa P-06. ………. 109
DAFTAR GAMBAR
Nomor Judul Halaman
1.1 Kurva-Kurva Tinggi Tekan-Kapasitas Pompa-Pompa yang
Beroperasi Secara Paralel ……….. 4
1.2 Standart ISO 10816-3 untuk getaran ……… 5
2.1 Gerak Harmonik sebagai Proyeksi suatu Titik yang Bergerak
pada Lingkaran ……….. 10
2.2 Gerak Periodek dengan Periode τ ………. 10
2.3 Sistem Pegas Massa dari Diagram Benda Bebas ……… 11
2.4 Sistem yang Teredam Karena Kekentalan dengan Eksitasi
Harmonik .……… 12
2.5 Model Pendekatan Getaran ………. 14 2.6 Karakteristik Sinyal Statik dan Dinamik ……… 17
2.7 Hubungan Data Time Domain dan Frekuensi Domain ………. 18
2.8 Kurva Head dan Kapasitas ……… 20 2.9 Hubungan Pompa Paralel ……….. 21 2.10 Kerangka konsep ………. 25 3.1 Konstruksi Pompa Sentrifugal ……….. 26
3.2 Setting Eksperiment dan Alat Uji ……….. 27
3.3 Konstruksi Pompa Sentrifugal ……….. 27
3.4 Pelaksanaan penelitian ……….. 30
4.1 Hubungan Amplitudo dengan Waktu pada F = 2 kg, P-01 ….…………. 36
4.2 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-01 …..………… 36
4.4 Hubungan Percepatan dengan Waktu pada F = 2 kg, P-01 …..………... 38
4.5 Hubungan Simpangan dengan Frekuensi pada F = 2 kg, P-01 …..…….. 38
4.6 Hubungan Amplitudo dengan Waktu pada F = 2 kg, P-02 ………….. 40
4.7 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-02 …………. 41
4.8 Hubungan Kecepatan dengan Waktu pada F = 2 kg, P-02 ………….. 41
4.9 Hubungan Percepatan dengan Waktu pada F = 2 kg, P-02 ………… 42
4.10 Hubungan Simpangan dengan Frekuensi pada F = 2 kg, P-02 ………… 43
4.11 Hubungan Amplitude dengan Waktu pada F = 2 kg, P-03 ………. 44
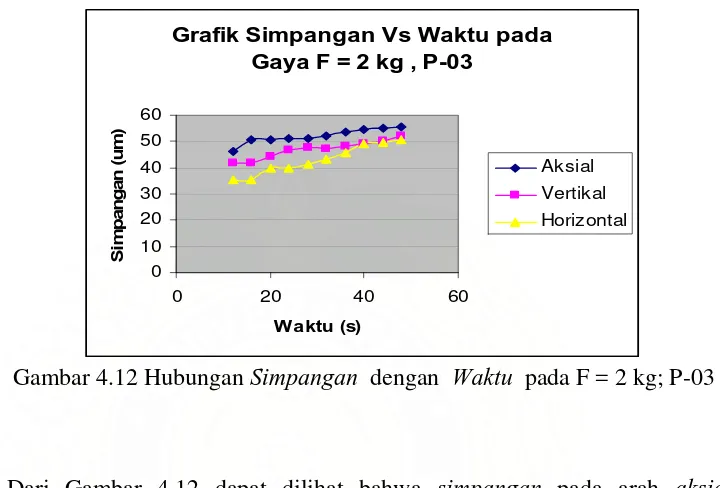
4.12 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-03 ………. 45
4.13 Hubungan Kecepatan dengan Waktu pada F = 2 kg, P-03 ………. 45
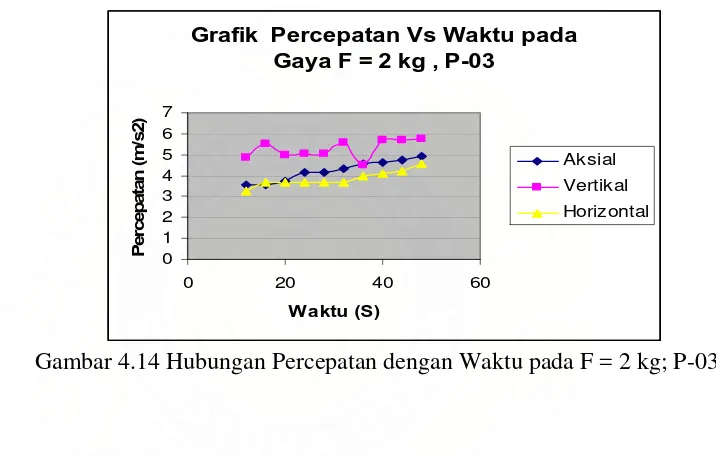
4.14 Hubungan Percepatan dengan Waktu pada F = 2 kg, P-03 ……… 46
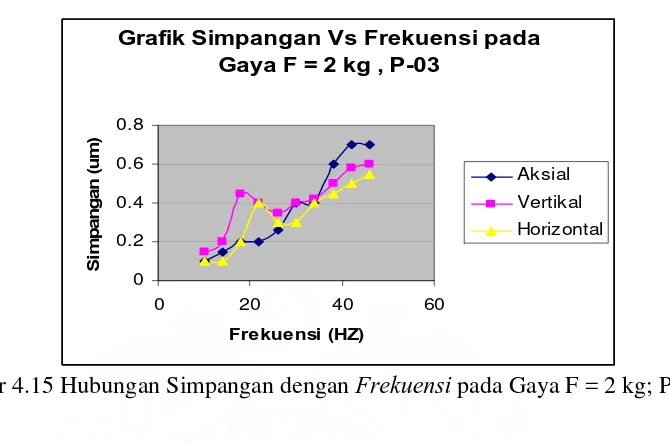
4.15 Hubungan Simpangan dengan Frekuensi pada F = 2 kg, P-03 ………… 47
4.16 Hubungan Amplitude dengan Waktu pada F = 2 kg, P-04 ………. 48
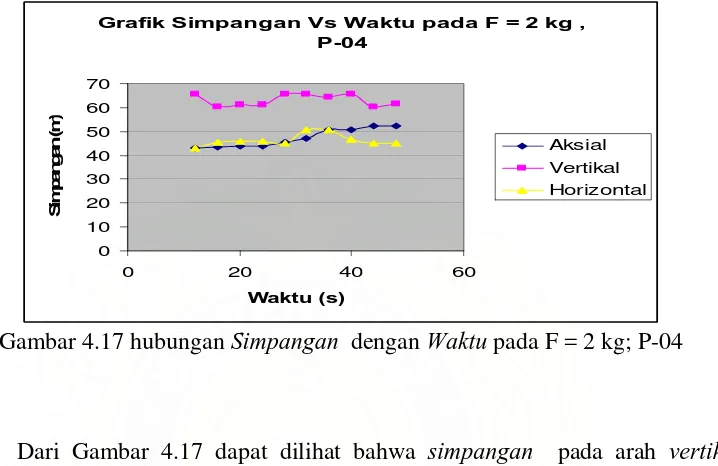
4.17 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-04 …………. 49
4.18 Hubungan Kecepatan dengan Waktu pada F = 2 kg, P-04 ………… 49
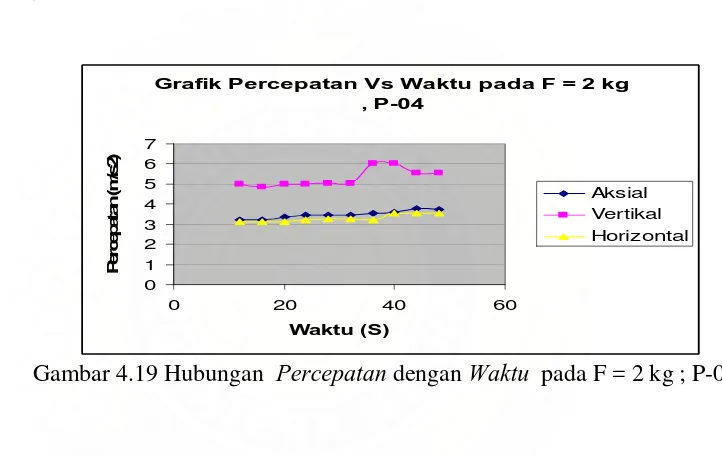
4.19 Hubungan Percepatan dengan Waktu pada F = 2 kg, P-04 ……… 50
4.20 Hubungan Simpangan dengan Frekuensi pada F = 2 kg, P-04 ……….. 51
4.21 Hubungan Amplitudo dengan Waktu pada F = 2 kg, P-05 ………….. 52
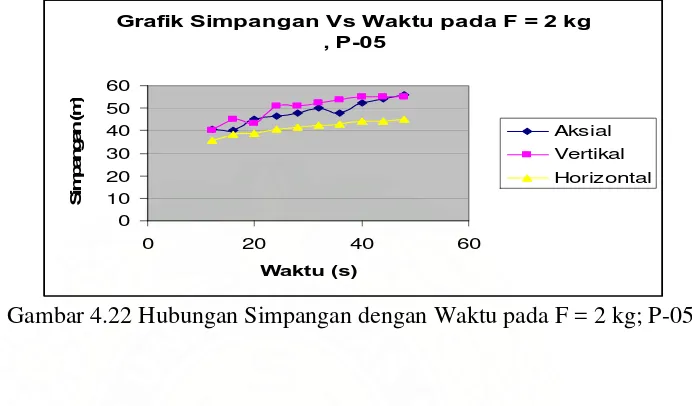
4.22 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-05 …………. 53
4.23 Hubungan Kecepatan dengan Waktu pada F = 2 kg, P-05 ………….. 53 4.24 Hubungan Amplitudo dengan Waktu pada F = 2 kg, P-06 ……… 55
4.25 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-06 ………….. 56
4.26 Hubungan Kecepatan dengan Waktu pada F = 2 kg, P-06 ……… 56
4.27 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-07 ……… 58
4.28 Hubungan Simpangan dengan Frekuensi pada F = 2 kg, P-07 ………… 59
4.29 Hubungan Amplitudo dengan Waktu pada F = 2 kg, P-08 ………. 61
4.30 Hubungan Simpangan dengan Waktu pada F = 2 kg, P-08 ………….. 61
4.31 Hubungan Simpangan dengan frekuensi pada F = 2 kg, P-08 …………. 62
4.32 Hubungan Simpangan dengan Waktu arah aksial pada
Landasan dengan F = 2 kg s/d 2,8 kg di P-01, P-02, P-03, P-04 ………. 63
4.33 Hubungan Simpangan dengan Waktu arah vertical pada
Landasan dengan F = 2 kg s/d 2,8 kg di P-01, P-02, P-03, P-04 …….. 65
4.34 Hubungan Simpangan dengan Waktu arah horizontalb pada Landasan dengan F = 2 kg s/d 2,8 kg di P-01, P-02, P-03, P-04 ……… 66
4.35 Hubungan Simpangan dengan Waktu arah aksial pada
Pompa dengan F = 2 kg s/d 2,8 kg di P-05,dan P-06 ……….. 67
4.36 Hubungan Simpangan dengan Waktu arah vertikal pada
Pompa dengan F = 2 kg s/d 2,8 kg di P-05,dan P-06 ……… 68
4.37 Hubungan Simpangan dengan Waktu arah horizontal pada Pompa dengan F = 2 kg s/d 2,8 kg di P-05,dan P-06 ……… 69
4.38 Hubungan Simpangan dengan Waktu arah aksial pada
Electromotor dengan F = 2 kg s/d 2,8 kg di P-05,dan P-06 …………. 70
4.39 Hubungan Simpangan dengan Waktu arah vertikalpada
Electromotor dengan F = 2 kg s/d 2,8 kg di P-05,dan P-06 ………….. 71
4.40 Hubungan Simpangan dengan Waktu arah horizontalpada
Electromotor dengan F = 2 kg s/d 2,8 kg di P-05,dan P-06 …………... 72
4.41 Sistem yang Bergerak ……… 74
4.42 Impeller Pompa ……….. 76
4.43 Poros Pompa ……… 79
4.44 Pembebanan pada Poros Pompa ……….. 80
4.46 Grafik Hubungan Head dan Kapasitas ………. 93
4.47 Hubungan Putaran dan Kapasitas ……….. 94
4.48 Hubungan Putaran dan Head ……….. 95
4,49 Batang Landasan Mesin Profil U 680 x 60 x 80 ………. 98
4,50 Batang Landasan Mesin Profil U 500 x 60 x 80 ……….... 99
4.51 Hubungan Simpangan dengan Frekuensi di Titik P-01 ……….. 104
4.52 Hubungan Kecepatan dengan Frekuensi di Titik P-01 ……… 104
4.53 Hubungan Percepatan dengan Frekuensi di Titik P-01 ………. 105
4.54 Hubungan Head dengan Simpangan, Kecepatan, percepatan
Pada Pompa P-05, P-06. ………. 108
4.55 Hubungan Kapasitas dengan Frekuensi pada Pompa
P-05, dan P-06. ……… 109
DAFTAR LAMPIRAN
Nomor Judul Halaman
1 Set Up Pengukuran Pompa Sentrifugal ……… 115
2 Alat Uji Pengukuran Getaran ……… 116
3 Laser Tachometer ……….. 117
4 Digital Amperemeter ……… 118
5 Gambar Sket Pompa Sentrifugal ……… 119
6 Gambar Pompa Sentrifugal ……… 120
7 Manometer ……….. 121
8 Spesifikasi Alat-Alat ……… 122
9 Alat Ukur Timbangan ………. 123
DAFTAR ISTILAH
Simbol Besaran Satuan
A Luas penampang mm2
Amplitudo m ;rad
Α
d Diameter mm
E Modulus Elastisitas N/m2
f Frekuensi Hz
fn Frekuensi natural Hz
G Modulus elastisitas geser N/m2 g Gaya gravitasi m/dt2 H Head m
Hl Head losses m
Ip Momen inersia polar kg.m2 Jo Momen inersia m4
K Kekakuan Nm/rad
L Panjang m
m Massa N
n Putaran rpm
p Daya KW
T Torsi mekanik Nm
vc Volume m3
W Berat N
x Vektor Simpangan arah x m
.
x Vektor Kecepatan arah x m/dt
..
x Vektor Percepatan arah x m/dt2 y Vektor Simpangan arah y m
.
y Vektor Kecepatan arah y m/dt
..
y Vektor Percepatan arah y m/dt2 z Vektor Simpangan arah z m
.
z Vektor Kecepatan arah z m/dt
..
z Vektor Percepatan arah z m/dt2
τ Periode osilasi dt
σ t Tegangan tarik N/mm2
ρ Kerapatan massa kg/m3 θ Beda fasa antara gaya-gaya perpindahan rad
ζ ratio redaman -
ω
k Frekuensi pribadi teredam rad/dtω
n Frekuensi pribadi tak teredam rad/dt
BAB I
PENDAHULUAN
1.1Latar Belakang
Pompa sentrifugal adalah salah satu jenis pompa yang sangat banyak dipakai
oleh dunia industri terutama industri pengolahan dan pendistribusian air. Ada
beberapa keunggulan pompa sentrifugal yaitu :
1. Konstruksinya sederhana dan mudah pemasangannya.
2. Perawatan, kapasitas dan head yang tinggi.
3. Harga relatif murah, tetapi kehandalannya tinggi.
Walaupun banyak terdapat kelebihan dan kehandalan dari pompa sentrifugal ini
tetapi masih sering dijumpai kegagalan pengoperasian yang terjadi dilapangan, hal ini
terutama terjadi yang disebabkan oleh kesalahan waktu pemasangan dan
pengoperasian, seperti penyetelan sambungan pada pompa dan motor, pondasi
pompa, penggunaan bentuk maupun bahan rangka pompa, getaran pada pipa tekan
dan kavitasi.
Kelemahan lainnya adalah kesalahan perencanaan yang mengakibatkan
timbulnya getaran yang tinggi pada pengoperasian pompa. Disamping itu ,
pemberhentian pompa juga memberikan getaran yang besar pada pompa, dimana
pompa dioperasikan dalam kondisi katup tertutup. Selain beberapa keunggulan serta
gaya dan kapasitas sehingga pompa dapat beroperasi dalam keadaan getaran yang rendah dan getaran itu dapat menjadi indikator kinerja dari pompa.
Pengujian dan penyelidikan getaran pada pompa yang disusun secara paralel telah
dilakukan oleh beberapa peneliti dan balai pengujian dengan mengkaji beberapa
aspek yang berbeda.
Getaran yang terjadi akibat pengoperasian pompa sentrifugal yang disusun
paralel adalah getaran relative antara satu pompa dengan pompa yang lain.
Getaran ini disebabkan :
1. Ketidak homogenan material pompa
2. Ketidak sempurnaan sistem penggerak pompa
3. Fluktuasi gaya
4. Fenomena kavitasi
5. Getaran luar yang ditransmisikan melalui pondasi
Getaran akibat sistem operasi pompa termasuk getaran eksitasi sendiri yang energi
eksitasinya termasuk dari dalam pompa itu sendiri, sedangkan tiga penyebab getaran
yang lain termasuk eksitasi luar yang menimbulkan getaran paksa.
Getaran akibat susunan parallel timbul bilamana kapasitas, putaran, kavitasi, ketidak
sempurnaan sistem penggerak pompa menimbulkan ketidak stabilan dan amplitude
getarannya membesar dimana frekuensi eksitasinya mendekati frekuensi pribadi[24]
Secara garis besar banyak factor yang berpengaruh terhadap getaran pada
sistem operasi paralel yaitu :
1. Aspek parameter operasi diantaranya : Kapasitas, Putaran, kecepatan aliran,
jenis fluida, bentuk impeller, jumlah sudu, bentuk sudu dan viskositas fluida.
2. Aspek struktur pompa diantaranya kekakuan statik, redaman, frekuensi
pribadi dan massa getar.
Dengan semakin majunya teknik perawatan peralatan mesin yang ditandai
dengan digunakannya teknik predictive maintenance yang berdasarkan kepada perhitungan kondisi mesin ketika beroperasi. Teknik ini bergantung kepada
kenyataan bahwa sebahagian besar mesin akan memberikan peringatan sebelum
terjadi kerusakan atau kegagalan. Beberapa gejala kegagalan pada mesin tersebut
dapat diprediksi dari beberapa analisa seperti analisa vibrasi, analisa temperatur serta
analisa keausan peralatan juga usia dari mesin itu sendiri, dimana mesin pompa
sentrifugal ini telah berusia ± 25 tahun apakah masih layak dipergunakan sebagai alat
percobaan dilaboratorium
Dari latar belakang keadaan diataslah maka dipandang perlu kiranya
dilakukan suatu penelitian eksperimen tentang pengaruh susunan pompa paralel
terhadap karakteristik vibrasi pompa sentrifugal satu tingkat (Single stage).
Bila kebutuhan pemompaan bervariasi, adalah lebih ekonomis untuk memasang
beberapa unit pompa yang kecil secara paralel dibandingkan dengan pemasangan satu
unit pompa yang berkapasitas besar. Untuk unit-unit yang bekerja dengan baik ,
pompa-pompa ini haruslah bekerja pada daerah yang stabil kurva–kurva
Sumber :Church,A,H Pompa dan Blower Sentrifugal , Penerbit Erlangga , 1986
Gambar 1.1 . Kurva–kurva tinggi tekan- kapasitas pompa-pompa Yang beroperasi secara paralel
1.2Perumusan Masalah
Penggunaan respon vibrasi dari aspek mekanis sebagai indikator perawatan
memberikan kemudahan pengujian dan titik pengujian tepat pada gaya penggerak ,
serta informasi maksimum dan pengujian dilakukan tanpa menyambung dan
menggangu operasi peralatan mekanik.
Dengan kemajuan teknologi perawatan peralatan mekanik sistem predictive
maintenance sebagai manajemen perawatan peralatan mekanik, maka Pengujian
getaran mekanik vibrasi sangat diperlukan sebagai indikator perawatan.[4]
Walaupun pembuatan pompa sentrifugal semakin maju namun sampai saat ini
sangat sulit untuk mencari standard vibrasi untuk pompa sentrifugal yang disusun
secara paralel, bahkan pabrik pembuat pompa tidak memberikan standard vibrasi dari
pompa buatannya. Standart ISO 10816-3 untuk standart getaran dapat dilihat pada
Gambar 1.2
Gambar 1.2 Standart ISO 10816-3 untuk getaran. [9]
Dari Gambar 1.2 dapat dilihat bahwa sesuai standart ISO 10816-3 untuk
getaran dikategorikan kepada 4 zona yaitu :
1. Zona A berwarna hijau, getaran dari mesin sangat baik dan dibawah
getaran yang diijinkan.
2. Zona B berwarna hijau muda, getaran dari mesin baik dan dapat
3. Zona C berwarna kuning, getaran dari mesin dalam batas toleransi dan
hanya dioperasikan dalam waktu terbatas.
4. Zona D berwarna merah, getaran dari mesin dalam batas berbahaya dan
dapat terjadi kerusakan sewaktu-waktu.
Batasan masalah yang dilakukan meliputi :
1. Pengukuran vibrasi pada pompa yang disusun secara paralel.
2. Pengukuran putaran operasi dengan tachometer.
3. Variasi beban gaya yang diberikan dinamometer pada pompa susunan paralel
4. Pembuatan operasional dinamometer untuk mengukur daya mekanis.
1.3 Tujuan Penelitian
1.3.1. Tujuan Umum
Tujuan umum dari penelitian ini adalah untuk mendapatkan kajian
eksperimental susunan Pompa secara parallel terhadap karakteristik vibrasi pompa
Sentrifugal satu tingkat
1.3.2. Tujuan Khusus
Tujuan khusus adalah :
1. Mendapatkan besarnya vibrasi pompa sentrifugal satu tingkat pada susunan
paralel variasi beban gaya dan kapasitas berupa data : a. Simpangan b. Kecepatan c. percepatan
2. Mendapatkan vibrasi masing – masing pompa yang disusun paralel.
3. Verifikasi hasil eksperiment dan teoritis
4. Mendapatkan frekuensi natural sistem (teoritis).
1.4 Manfaat Penelitian
Penelitian ini merupakan suatu upaya nyata dari pihak perguruan tinggi
dalam memberikan informasi kepada dunia industri tentang hubungan pompa
sentrifugal yang dihubungkan secara paralel terhadap vibrasi yang timbul.
Adapun manfaat dari penelitian ini adalah :
1. Memberikan informasi tentang pengujian getaran pada pompa sentrifugal yang
diberi beban gaya dan dihubungkan secara Paralel
2. Memberikan informasi kepada dunia industri yang menggunakan pompa
sentrifugal susunan paralel tentang pemanfaatan sinyal vibrasi sebagai
indikator perawatan atau maintenance.
3. Memberikan masukan kepada pembuat pompa untuk memberikan data vibrasi
dari pompa yang diproduksi khususnya pompa yang disusun secara paralel
sebagai acuan perawatan pompa
4. Untuk mengetahui apakah alat pompa sentrifugal ini masih layak
BAB 2
TINJAUAN PUSTAKA
Pompa adalah salah satu dari jenis mesin – mesin fluida yang berguna untuk
memindahkan suatu fluida cair dari suatu tempat ketempat lain. Pompa sentrifugal
adalah salah satu jenis pompa yang sangat banyak dipergunakan. Dalam dunia
industri biasanya pompa sentrifugal dapat beroperasi dengan maksimal dan tahan
dioperasikan dalam waktu yang cukup lama, hal ini tidak terlepas dari jenis pompa
apa yang kita pergunakan, pemasangan serta pengoperasian yang tepat sehingga akan
bekerja sesuai dengan kegunaannya. Untuk menentukan apakah suatu peralatan
bekerja sesuai dengan kondisi terbaiknya diperlukan indikator-indikator yang dapat
bekerja dengan cepat dan efisien.
Vibrasi adalah salah satu indikator yang baik untuk menentukan apakah suatu
peralatan beroperasi dalam keadaan baik. Semakin kecil nilai suatu vibrasi maka
akan menjadi semakin baiklah peralatan itu, dan sebaliknya apabila suatu peralatan
yang beroperasi mempunyai getaran yang besar atau tinggi, maka kondisi peralatan
tersebut perlu diadakan pemeriksaan kembali. Oleh karena itu suatu peralatan yang
beroperasi sebaiknya memiliki suatu nilai getaran standart dan batasan getaran yang
diperbolehkan sesuai dengan standar dari pabrik pembuatnya, sehingga apabila nilai
getaran yang terjadi diluar batasan yang diizinkan maka peralatan tersebut harus
menjalani tindakan perawatan (maintenance).
2.1. Vibrasi
2.1.1. Gerak Harmonik
Gerak osilasi dapat berulang secara teratur, jika gerak itu berulang dalam
selang waktu yang sama, maka geraknya disebut dengan gerak periodik. Sedangkan
waktu pengulangannya disebut dengan periode osilasi dan kebalikannya yaitu f = 1/
disebut frekwensi. Jika gerak dinyatakan dalam fungsi waktu x(t), maka setiap gerak
periodik harus memenuhi hubungan (t) = x (t + ). Secara umum gerak harmonik
dapat dinyatakan dengan persamaan : [24]
x = A sin 2 t / (2.1)
dimana : A adalah amplitudo osilasi yang diukur dari posisi setimbang massa.
adalah priode dimana gerak diulang pada t = .
Gerak harmonik sering dinyatakan sebagai proyeksi suatu titik yang bergerak
melingkar dengan kecepatan yang tetap pada suatu garis lurus seperti terlihat pada
Gambar 2.1 dengan kecepatan sudut garis OP sebesar , maka perpindahan
simpangan x dapat dituliskan sebagai : x = A sin t (2.2)
Besarnya biasanya diukur dalam radian perdetik dan disebut frekwensi lingkaran.
Oleh karena itu gerak berulang dalam 2 radian, maka didapat hubungan :
= 2 / t = 2 . f (2.3)
Dengan dan f adalah periode dan frekwensi gerak harmonik berturut turut dan
biasanya diukur dalam detik dan siklus perdetik.
Kecepatan dan percepatan gerak harmonik dapat diperoleh dengan mudah baik secara
Dengan menggunakan notasi titik untuk turunannya, maka didapat :
= A cos t = A sin ( t + /2) ( 2.4)
.
x
= - A sin t = 2 A sin ( t + ) (2.5)
..
x
xx X
Gambar.2.1. Gerak harmonik sebagai proyeksi suatu titik yang bergerak
pada Lingkaran
2.1.2. Gerak Periodik
Pada getaran biasanya beberapa frekwensi yang berbeda ada secara
bersama-sama. Sebagai contoh, getaran dawai biola terdiri dari frekwensi dasar f dan semua
harmoniknya 2f, 3f dan seterusnya.. Contoh lain adalah getaran bebas sistem dengan
banyak derajat kebebasan, dimana getaran pada tiap frekwensi natural memberi
sumbangannya. Getaran semacam ini menghasilkan bentuk gelombang kompleks
yang diulang secara periodik seperti gambar berikut:
X(t)
t
τ
Gambar.2.2. gerak periodik dengan periode .
2.1.3. Getaran Bebas (Free Vibration)
Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang ada
dalam sistem itu sendiri (inherent) dan apabila tidak ada gaya luar yang bekerja.
Sistem yang bergetar bebas akan bergetar pada satu atau lebih frekwensi naturalnya
yang merupakan sifat dinamika yang dibentuk oleh distribusi massa dan
kekakuannya.
m Δ
peregangan tanpa
Posisi
gan kesetimban Posisi
statik X)
( k Δ+
Δ
k
x
w
.
X
..
X
Gambar 2.3. Sistem pegas-massa dari diagram benda bebas
Hukum Newton kedua adalah dasar pertama untuk meneliti gerak sistem, pada
Gambar 2.3 terlihat perubahan bentuk pegas pada posisi kesetimbangan adalah dan
gaya pegas adalah k yang sama dengan gaya gravitasi yang bekerja pada massa m.
K = w = mg (2.6)
Hukum Newton kedua untuk gerak diterapkan pada massa m :
m = F = w - k ( + x) (2.7)
..
x
Dan karena k = w, maka diperoleh :
m = - kx (2.8)
..
x
2 0
..
=
+ x
x
ω
n (2.9)Sehingga persamaan umum persamaan differensial linier orde kedua yang homogen :
x= A sin n t + cos n t (2.10)
Periode natural osilasi dibentuk dari n = 2 atau
= 2 m/k (2.11)
dan frekwensi natural adalah :
fn = 1 / = 1/2 k/m ( 2.12)
2.1.4 Getaran Paksa (Forced Vibration)
Eksitasi harmonik sering dihadapi dalam sistem rekayasa yang biasanya
dihasilkan oleh ketidakseimbangan pada mesin –mesin yang berputar. Eksitasi
harmonik dapat berbentuk gaya atau simpangan beberapa titik dalam sistem.
Getaran yang terjadi karena rangsangan gaya luar disebut getaran paksa.
Gambar 2.4. Sistem yang teredam karena kekentalan dengan eksitasi harmonik
Persamaan differensialnya adalah [24]
.m x+cx+kx= Fo Sinωt (2.13)
. ..
.
Solusi khusus persamaan keadaan tunak (steady state) dengan frekwensi yang
sama dengan frekwensi eksitasi dapat diasumsikan berbentuk :
x = X sin ( t - Φ) ( 2.14)
Dengan x adalah amplitude osilasi dan adalah perbedaan fase simpangan terhadap
gaya eksitasi, sehingga diperoleh :
x =
2 2 2 ) ( )
(k m
ω
cωfo
+
− (2.15)
dan
= tan-1 .
ω
ω 2 m k c− (2.16)
Dengan membagi pembilang dan penyebut persamaan (2.15) dan (2.16) dengan k,
akan diperoleh :
x =
2 2 2 ) / ( ) / 1 ( / k cw k mw k Fo +
− (2.17)
tan =
k mw k cw / 1 /
− (2.18)
Persamaan-persamaan selanjutnya dapat dinyatakan dalam besaran-besaran sebagai
berikut : n = k/m = frekwensi osilasi tanpa redaman.
Cc = 2 m n = redaman kritis.
= C/ Ce = factor redaman
C / k = C/ Ce = Ce /k = 2 = n ϖ
ϖ
Fo Xk
= 1/ (1 ( ) n ϖ
ϖ
− 2
)2 + (2 (
n ϖ
ϖ
))2 (2.19)
tan =
) / ( 1
) / ( 2
n n ϖ ϖ
ϖ ϖ ς
− 2
2.1.5. Landasan Teori Pengujian Getaran Mesin
Getaran yang timbul pada pompa dikarenakan oleh putaran motor melalui
koupling dan impeller sehingga dapat dianalisa sesuai dengan gerak yang timbul.
Dalam kondisi ini dapat diasumsikan bahwa akan terjadi torsi yang dihasilkan
motor melalui mekanisme koupling. Untuk memudahkan analisa gerak, maka
Gambar 2.5 dapat disederhanakan menjadi:
:
. model fisis system diidealisasi
Gambar 2.5 Model pendekatan getaran
Persamaan pada kondisi normal sesuai dengan hukum Newton yaitu
M = J (2.20)
..
θ
Maka didapat :
(J01 + J02 ) + kt = T0 sin t (2.21)
..
θ
Untuk gerak harmonik maka berlaku :
θ = A sin t ( 2.22)
= A cos t (2.23)
.
θ
= - 2 A sin t (2.24)
..
θ
Sehingga (J01 + J02) (- 2 A sin ) + Kt (Asin ) = T 0 Sin
(Kt - (J01 + J02) 2 ) A = T0
amplitudo getarannya adalah :
A =
) ) (
(Kt J01 J02 ϖ2 To
+
− (2.25)
Besarnya frekwensi pribadi system adalah
n = K1/(J01+J02) (2.26)
Kekakuan yang terjadi pada poros (K ) adalah
K = I p L G
(Nm / rad) (2.27)
Dimana I p adalah momen inersia polar penampang melintang poros (m4)
I p =
32 4
d π
maka K =
L G d
32 4
π
Massa momen inersia impeller dan kopling (Jo)
Untuk menghitung momen inersia pada impeller dan kopling dapat dihitung dari
Maka :
8 . . 8
. 2
0 2
0
d v j atau g
d w
j = c = c ρ
(2.28)
Torsi yang bekerja pada sistem (T) dianggap mengalami torsi harmonik sehingga
T(t) = To sin t ini diasumsikan bahwa torsi maksimum bekerja pada
keadaan sin t = 1, maka akan berlaku :
T(t) = To : To =
n xP π
2 60
(2.29)
2.1.6. Pengolahan Data Vibrasi
2.1.6.1. Data Domain Waktu (Time Domain)
Pengolahan data time domain melibatkan data hasil pengukuran objek
pemantauan sinyal getaran, tekanan fluida kerja, temperatur fluida kerja maupun
aliran fluida kerja. Pada perakteknya pengukuran tekanan dengan menggunakan
sensor tekanan tipe piezoelektrik memungkinkan mengukur sifat tekanan yang dinamik, sehingga dapat diamati perubahan tekanan dalam ruang bakar suatu mesin
Diesel atau perubahan tekanan fluida kerja yang mengalir dalam pipa. Dalam kasus
pengukuran temperatur dengan termometer yang konvensional karena karakteristik
alat ukurnya, maka tidak dapat dilakukan pengukuran temperatur secara dinamik.
Demikian pula halnya dengan pengukuran aliran fluida kerja, sehingga untuk
memungkinkan pengukuran objek pemantauan berupa sinyal dinamik, maka
diperlukan sensor yang memiliki karakteristik dinamik tertentu.
Hasil pengukuran objek pemantauan dalam domain waktu dapat berupa sinyal :
a. Sinyal statik, yaitu sinyal yang karakteristiknya (misalkan amplitudo, arah
kerja) yang tidak berubah terhadap waktu.
b. Sinyal dinamik, yaitu sinyal yang karakteristiknya berubah terhadap waktu
sehingga tidak konstan.
Sinyal dinamik yang sering ditemui dalam perakteknya berasal dari sinyal getaran,
baik yang diukur menggunakan accelerometer, vibrometer, maupun sensor
simpangan getaran .
A A
Statik Dinamik
+ +
0 _ waktu 0 _ waktu
Gambar 2.6 Karakteristik Sinyal Statik dan Dinamik
Untuk keperluan pengolahan sinyal getaran dalam Time Domain , perlu diperhatikan karakteristik sinyal getaran yang dideteksi oleh masing – masing sensor
percepatan, kecepatan dan simpangan getaran (Displacement).[24]
2.1.6.2. Data Domain Frekwensi (Frekwensi Domain)
Pengolahan data frekwensi domain umumnya dilakukan dengan tujuan :
2. Untuk memeriksa apakah amplitudo untuk rentang frekwensi tertentu masih
berada dalam batas yang diizinkan.
3. Untuk tujuan keperluan diagnosis.
Dalam prakteknya proses konversi ini dilakukan dengan menggunakan
proses Transformasi Fourier Cepat ( Fast Fourier Transformation , FFT).
Time Domain
Gambar 2.7 Hubungan Data Time Domain dengan Frequency Domain
Data domain waktu merupakan respon total sinyal getaran, sehingga
karakteristik masing-masing sinyal getaran tidak terlihat jelas. Dengan bantuan
konsep deret fourier, maka sinyal getaran ini dapat dipilih-pilih menjadi komponen dalam bentuk sinyal sinus yang frekwensinya merupakan frekwensi-frekwensi dasar
dan harmonik.
2.2. Pompa
2.2.1. Teori Dan Prinsip Kerja Pompa Sentrifugal
Pompa adalah suatu mesin fluida yang berfungsi untuk mengalirkan fluida
dari tempat yang energinya lebih rendah ketempat yang energinya lebih tinggi. Oleh
Frequency Domain
F F T
F F T
karena itu pompa merupakan suatu mesin kerja, dimana pada saat sekarang ini
penggunaannya sangat luas dalam kehidupan untuk mengalirkan fluida cair
Pada umumnya pompa memiliki satu atau lebih impeller dengan sudu-sudu yang dipasang pada impeller tersebut dan diselubungi oleh rumah pompa (casing).
Fluida memasuki impeller secara aksial dengan kecepatan tertentu yang mempunyai
energi kinetis dan energi potensial oleh sudu-sudu impeller yang berputar dengan
kecepatan tinggi. Fluida dikumpulkan di rumah volute yang merupakan energi
kinetis menjadi energi tekanan yang disebabkan karena adanya perubahan momen,
maka fluida yang terdapat di antara sudu-sudu menerima gaya sentrifugal sehingga
cairan dilemparkan keluar dengan kecepatan tinggi.[5]
2.2.2 Pengoperasian Pompa
Dalam pengoperasiaanya pompa harus memenuhi head dan kapasitas
yang diinginkan, kemampuan pompa dalam hal ini dapat dilihat pada kurva
karakteristik pompa. Besarnya head pompa dalam sistem pemipaan merupakan head
yang dibutuhkan untuk mengalirkan fluida melalui instalasi pemipaan, yang terdiri
dari head statis. Head statis adalah beda ketinggian permukaan dan tekanan pada
kedua permukaan. Head sistem pemipaan ini dapat digambarkan sebagai kurva head
kapasitas yang merupakan kurva static pemipaan seperti terlihat pada Gambar
Head (H)
Kurva karakteristik pompa
H ap Titik operasi
Kurva Karakteristik pipa HStatis
Kapasitas (Q)
Gambar 2.8 Kurva Head dan Kapasitas
Pada Gambar 2.8 titik operasi pompa pada titik ini head yang diperlukan
oleh sistem pemipaan sama dengan head yang diberikan pompa pada kapasitas aliran
yang sama Kurva head kapasitas pada sistem pemipaan dapat berubah seperti pada
head statis atau tahanan sistem pemipaan berubah.
2.2.3. Hubungan Pompa Paralel
Pada hubungan paralel dua buah pompa dihubungkan pada saluran keluar
yang sama terlihat pada Gambar 2.9., untuk mencegah jangan sampai sebuah pompa
mengalirkan kembali zat cair kedalam saluran isap pompa lain, umpamanya bila
pompa yang terakhir ini tidak bekerja, maka perlu memasang sebuah katup
dibelakang setiap pompa. Dua buah pompa yang sejenis pada tinggi tekan secara
manometer yang sama akan menghasilkan kuantitas zat cair yang sama besar. Jadi
aliran volume dari kedua buah pompa ini pada tinggi tekan yang sama besar menjadi
dua kali lebih besar dari pada satu pompa.[21]
• Tekan tekan
Isap
Gambar 2.9. Hubungan pompa parallel
2.2.4. Penyebab Vibrasi dari berbagai aspek Pada Pompa Sentrifugal
Setiap benda yang terbuat dari material yang elastic (termasuk didalamnya
metal) umumnya mempunyai periode vibrasi. Hal ini terjadi karena komponen pompa
tidaklah mutlak seragam terhadap garis tengah dari poros pompa.
Ada beberapa penyebab vibrasi pada pompa :[24]
A Vibrasi yang ditinjau dari aspek mekanis pada pompa
1. Tidak balansnya komponen pompa yang berputar (impeller atau shaft)
2. Bengkoknya shaft
2 Tegangan pada pipa
3 Kerusakan pada bearing
4 Mengendurnya ikatan baut
B Vibrasi yang disebabkan aspek hidrolis
1. Pengoperasian dibawah best effisiensi point pompa
2. Kavitasi
3. Vane impeller berputar terlalu dekat dengan pengarah air pompa
4. Masuknya udara pada pompa
5. Terjadinya turbulence
6. Water hammer
C Vibrasi yang disebabkan lainnya
1. Terjadinya harmonic akibat vibrasi peralatan didekatnya 2. Pengoperasian pompa pada putaran kritis
3. Kerusakan pada seal
2.2.5 Aspek mekanis pada pompa
Tidak balansnya komponen pompa yang berputar dan bengkoknya impeller dapat menyebabkan getaran yang besar . Bantalan yang dipergunakan pada pompa
satu tingkat umumnya adalah bantalan luncur dan bantalan peluru / ball bearing yang
mempunyai beban bantalan yang besar dan kecepatan pergerakan yang besar. Untuk
mendapatkan effisiensi yang tinggi pada pompa, permukaan impeller haruslah dibuat
sehalus mungkin, baik didalam laluan sudu maupun bagian luar impeller tersebut.
Pemipaan untuk pompa dikategorikan atas tiga bagian yaitu jaringan hisap, buang dan
bantu. Tinggi tekan yang harus dihasilkan pada prinsipnya merupakan fungsi tahanan
pipa. Pondasi juga memegang peranan penting dalam menimbulkan getaran serta
mengendurnya ikatan baut dapat mengakibatkan getaran besar.[26]
2.2.6 Aspek hidrolis pada pompa
Dari aspek hidrolis di dapat bahwa NPSH yang tidak cukup, ketidakstabilan
hidrolik dengan pembentukan pusaran (Vortex) yang cenderung untuk menimbulkan
getaran, kebisingan, kavitasi dan keausan bantalan yang berlebihan merupakan
sebagian dari gangguan - gangguan yang dialami dengan pemipaan sisi hisap yang
tidak didesain dengan baik.Yang lainnya antara lain kapasitas yang berkurang, palu
air (water hammer), pemanasan lebih (Overheating) pompa dan umur bagian yang
beroperasi yang lebih singkat. Untuk mencegah pemindahan getaran kerumah pompa,
baik pemipaan hisap maupun buang haruslah ditopang secara sendiri–sendiri.
Pada satu tempat yang dekat dengan flens–flens hisap dan buang. Water hammer
di dalam sistem pemipaan yang tertutup terjadi sewaktu kecepatan cairan berubah
dengan tiba–tiba akibat pengoperasian , penghentian atau perubahan kepesatan
pompa yang tiba–tiba.
2.3. Kerangka Konsep
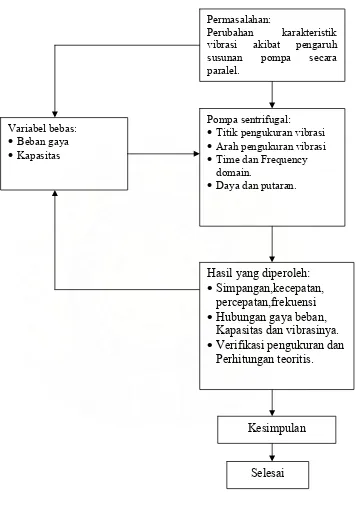
Hasil yang diperoleh dalam suatu penelitian dipengaruhi oleh
variable-variabel penelitian itu sendiri. Pada dasarnya kerangka konsep dalam penelitian ini
dapat dilihat seperti pada Gambar 2.10, dimana dapat dilihat bahwa permasalahannya
satu tingkat. Variabel bebas yang diatur sebagai input pada pompa sentrifugal yang
menjadi subjek penelitian ini adalah variasi beban gaya dan kapasitas. Pengukuran
yang dilakukan pada subjek ini meliputi karakteristik getaran yang timbul pada
pompa akibat perubahan variasi beban gaya dan kapasitas dengan mempertahankan
daya dan putaran pompa. Hasil yang diperoleh meliputi respon vibrasi dari pompa
berupa simpangan (diplacement), kecepatan (velocity), percepatan (acceleration). Frekwensi untuk setiap variasi beban gaya serta putaran dan daya pompa dianggap
konstan walaupun dalam penelitian ini dilakukan pengukuran sebagai kontrol.
Permasalahan:
Perubahan karakteristik vibrasi akibat pengaruh susunan pompa secara paralel.
Variabel bebas:
•Beban gaya
•Kapasitas
Pompa sentrifugal:
• Titik pengukuran vibrasi
• Arah pengukuran vibrasi
• Time dan Frequency
domain.
• Daya dan putaran.
Hasil yang diperoleh: •Simpangan,kecepatan,
percepatan,frekuensi •Hubungan gaya beban,
Kapasitas dan vibrasinya. •Verifikasi pengukuran dan
Perhitungan teoritis.
Kesimpulan
[image:45.612.149.506.113.621.2]Selesai
BAB 3
METODE PENELITIAN
3.1. Tempat Dan Waktu
Penelitian ini akan dilaksanakan sejak tanggal disetujuinya usulan penelitian
ini oleh pengelola program sampai dinyatakan selesai. Tempat penelitian
direncanakan di Fakultas Teknik Jurusan Teknik Mesin Universitas HKBP
Nommensen Medan dan USU Medan.
3.2.Bahan Peralatan Dan Metode
3.2.1. Bahan
Dalam penelitian ini subjek penelitian adalah berupa pompa sentrifugal satu
tingkat yang tersusun secara paralel seperti terlihat pada Gambar 3.1.
Gambar 3.1 Konstruksi Pompa Sentrifugal
[image:47.612.163.467.108.643.2]
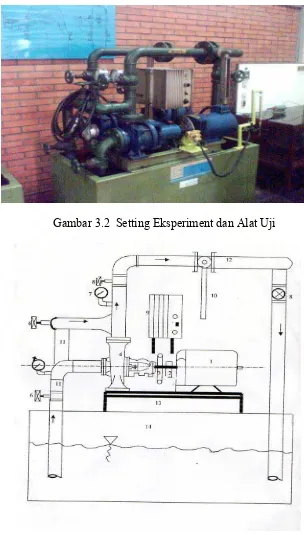
Gambar 3.2 Setting Eksperiment dan Alat Uji
Keterangan gambar :
1. Elektromotor 8. Katup cegah (Check valve)
2. Kopling 9. Kotak Switch kapasitas dan putaran
3. Dinamometer 10. Flowmeter
4. Pompa sentrifugal 11. Pipa Isap
5. Bantalan 12. Pipa Tekan
6. Katup Buka (Gate valve) 13. Landasan
7. Manometer 14. Reservoir (Tangki Air)
3.2.2. Peralatan Dan Metode
1 Vibrometer
Untuk melakukan pengukuran terhadap tingkat vibrasi yang terjadi pada
pompa digunakan instrumen pengukur sinyal vibrasi, yaitu vibrometer digital Handheld 908B. Setting instrumen pengukur vibrasi ini dilakukan pada saat akan melakukan pengukuran sinyal vibrasi.
Spesifikasi vibrometer Handheld 908B adalah sebagai berikut :
Specifikasi :
• Amplitude Ranges
Displacement 0,1 – 1999 μm ( or 200 mil) peak-peak Velocity 0,1 – 199.9 mm/s ( or 20 in/s ) true RMS Acceleration 0,1 – 199.9 m/s2 ( or 20 g ) peak
• Overall Accurary ± 5 % • Temperature range 0 – 40 oC • Frequency Response
Displacement 10 – 500 HZ
Velocity 10 – 1000 HZ
Acceleration 10 – 1000 HZ ( Inner acceleration 908 B )
10 – 10000 HZ ( Depending on external accelerometer model ) * Battery 9V 6F22. 25 hours of continuous operation
* Dimensions 13 x 6 x 2,3 cm ; Weight : 200 g
3.3. Variabel Yang Diamati
Adapun variable yang akan diamati dalam penelitian ini adalah :
1. Displacement atau simpangan dari delapan titik dan tiga arah pengukuran.
2. Velocity atau kecepatan dari delapan titik dan tiga arah pengukuran.
3. Acceleration atau percepatan dari delapan titik dan tiga arah pengukuran
4. Frekwensi natural dari sistem pompa sentrifugal susunan paralel.
5. Kapasitas dari pompa sesuai dengan variasi beban yang diberikan
dinamometer..
3.4. Teknik Pengukuran, Pengolahan Dan Analisa Data
3.4.1. Teknik Pengukuran
Penyelidikan sinyal vibrasi yang timbul akibat perubahan susunan pompa
secara paralel dilakukan pada pompa dengan titik pengukuran searah sumbu vertikal,
horizontal dan aksial. Pengukuran dilakukan pada titik yang telah ditentukan dengan
pengambilan data berdasarkan time domain dan frekwensi domain.
Pengukuran ketiga arah tadi dikarenakan sistem pengujian diasumsikan mempunyai 3
30
3.4.2. Pengolahan Dan Analisa Data
Vibrasi yang terjadi pada pompa dengan variasi data yang diperoleh akibat
perubahan beban gaya dan kapasitas susunan pompa secara paralel diolah dan
dianalisa serta dibahas untuk memperoleh perilaku vibrasinya.
3.5. Pelaksanaan Penelitian
Mulai
Secara garis besar pelaksanaan penelitian ini akan dilaksanakan berurutan dan
sistematis, seperti ditunjukkan pada Gambar 3.4.
Gambar 3.4. Pelaksanaan Penelitian Mulai
Pengujian untuk susunan paralel:
• Pengukuran gaya beban
• Pengukuran kapasitas.
• Pengukuran putaran motor.
• Pengukuran vibrasi.
Penggantian gaya beban dan kapasitas.
•Variasi gaya beban.
•Kapasitas
Hasil dan analisa.
Kesimpulan
Selesai
BAB 4
HASIL DAN PEMBAHASAN
4.1 Pendahuluan
Pada penelitian ini sebuah pompa sentrifugal yang berhubungan secara
paralel dilengkapi dengan sebuah dinamometer. Dinamometer yang diletakkan pada sisi kopling dipergunakan untuk memberi gaya beban terhadap poros pompa. Adapun
pemberian gaya pada roda dinamometer berfungsi untuk mengurangi kecepatan putar poros pompa. Dengan mengukur pengaruh putaran dan getaran mekanis yang terjadi
pada pompa , dapat diketahui berapa besar getaran yang timbul, apakah masih sesuai
dengan batas-batas vibrasi mesin yang baik ataukah masih dalam batas-batas toleransi
Ketika roda diberikan gaya beban ,maka terjadi gaya gesek kinetik antara kampas rem
dengan bidang geseknya dan menimbulkan gaya reaksi yang sebanding dengan
perputaran poros.
Dalam pengambilan data sistem pengujian yang dilakukan adalah
mengukur seberapa besar respon getaran pompa yang timbul pada pemberian gaya
beban 2 kg, 2.2 kg , 2.4 kg, 2.6 kg, 2.8 kg . Data yang diambil dari variasi gaya ini diukur pada delapan titik pengukuran yaitu pada landasan dititik P-01, P-02, P-03, P-04 ; pada kedua pompa dititik P-05 , P-06 dan kedua elektromotor pada titik P-07, P-08 berdasarkan frequensi domain dan time domain . Pengambilan data respon getaran pompa sentrifugal yang dihubungkan secara paralel ini dengan
4.2 Pengukuran respon getaran pompa paralel pada gaya dinamometer
Pengukuran respon getaran pada pompa dengan dinamometer sebagai variasi gaya yang dimulai 2 kg, 2.2 kg, 2.4 kg, 2.6 kg, 2.8 kg , Adapun tujuan
pengukuran ini adalah untuk menemukan karakteristik respon getaran dari pompa
sentrifugal yang dihubungkan secara paralel.
4.2.1 Pengukuran respon getaran pompa paralel dengan dinamometer pada gaya 2 kg 4.2.1.1 Pengukuran respon getaran pada landasan di F = 2 kg di titik P-01.
Pengukuran respon getaran dimbil pada gaya 2 kg dititik P-01 dilakukan
dengan mengambil displacement (simpangan) , velocity ( kecepatan ), Acceleration ( Percepatan ) untuk arah aksial, vertikal, horizontal, data pengukuran dapat dilihat pada Tabel 4.1.
Tabel 4.1 Hasil pengukuran respon getaran pada landasan dengan gaya F = 2 kg pada P-01
Aksial Vertikal Horizontal
N o
Waktu (detik ) Dis
(um)
Vel (cm/s)
Acc (cm/s2)
Dis Vel Acc Dis Vel Acc
1 12 44.5 0.935 2.00 43.0 1.250 2.15 40.5 0.950 2.030 2 16 45.0 0.920 2.15 44.0 1.100 2.18 40.0 1.050 2.075 3 20 46.5 1.015 2.20 48.0 1.150 2.25 42.0 1.035 2.110 4 24 47.0 0.990 2.20 50.5 1.035 2.30 42.5 1.020 2.230 5 28 48.0 0.925 2.30 52.5 1.050 2.35 41.5 1.020 2.330 6 32 50.0 0.925 2.43 51.0 1.050 2.45 40.5 1.275 2.425 7 36 50.5 1.005 2.57 51.0 1.400 2.40 42.0 1.005 2.475 8 40 51.5 1.005 2.67 48.0 1.400 2.54 45.5 1.035 2.475 9 44 50.5 1.035 2.71 52.0 1.350 2.60 47.5 1.135 2.580 10 48 49.0 1.155 2.90 52.0 1.350 2.75 49.5 1.190 2.630 Rata-rata 48.25 0.991 2.41 49.2 1.21 2.49 43.1 1.14 2.34
Harga respon getaran pada Tabel 4.1 adalah penjumlahan harga rata–rata
yang didapat dari pengukuran langsung simpangan,kecepatan dan percepatan dibagi
jumlah pengujian.
Berdasarkan analisa perhitungan getaran didapat berdasarkan :
Simpangan : x = A . Sin ϖt
A =
t Sin
x
ϖ (4.1)
Kecepatan : x=ϖ ACosϖt
.
A =
t Cos
x ϖ ϖ
.
(4.2)
Percepatan : x
ϖ
2ASinϖt ..− =
A =
t Sin x
ϖ
ϖ
2 ..− (4.3)
Disubsitusikan persamaan 4.1 ke pers. 4.3 akan didapat :
ϖ
2.. x
x= − (4.4)
Adapun tanda negative menyatakan bahwa arah percepatan berlawanan dengan arah
simpanganya .[24]
Sehingga didapat frekuensi dalam bentuk kecepatan sudut :
x x ..
− =
Untuk A sebagai harga simpangan maksimum mempunyai harga yang sama pada
simpangan (displacement), Kecepatan (velocity), dan percepatan (acceleration), sehingga berlaku hubungan : A1 = A2 = A3 (4.6)
Sehingga didapat :
t Sin x t Cos x t Sin x ϖ ϖ ϖ
ϖ
ϖ
2.. .
=
=
Sehingga :
t Cos t Sin x x ϖ ϖ ϖ = . Maka : . tan . x x arc t ϖ
ϖ = (4.7)
Kecepatan sudut untuk masing-masing arah dapat dihitung dari Tabel 4.1 yaitu :
Arah aksial
Kecepatan sudutnya : = =
x x ..
ϖ 499.48
10 25 . 48 10 41 . 2 6 2 = − − x x
= 22,349 rad/s
2 6 . 10 991 , 0 35 , 22 10 25 . 48 tan tan . − − = = x x x arc x x arc t ϖ ϖ
= arc.tan 0,1088 = 6,209 rad
Sehingga diperoleh perioda :
t =
ϖ ϖt = 35 , 22 209 . 6
= 0,278 s
Amplitudo adalah A =
t Sin
x ϖ
A =
278 , 0 35 , 22
10 25 ,
48 6
x Sin
x −
= 4,56 x 10-4 m
Dengan cara yang sama dalam perhitungan kecepatan sudut,perioda, dan amplitudo
untuk arah vertikal dan horizontal dapat dicari dan ditabelkan sebagai Tabel 4.2 . Tabel 4.2 Amplitudo pada F = 2 kg ; P-01
Arah
Aksial Vertikal Horizontal
ϖ (rad/s) 22,349 22,4966 23,3007 t
ϖ (rad) 6,209 5,226 5,0394
t (s) 0,278 0,2323 0,2161
A (m) 4,56 x 10-4 5,535 x 10-4 5,042 x 10-4
Dari Tabel 4.2 diatas dapat diperoleh simpangan dari rumus : Arah aksial : x = A Sin ϖτ = 4,56 x 10-4 Sin 22,349 τ
= A Cos
.
x ϖτ = 1,02 x10−2 Cos 22,349τ
ϖ2 ϖ τ 2,28 10 1 22,349τ
..
Sin x
Sin A
x = − =− −
Arah vertical : y = A Sin ϖτ = 5,535 x 10-4 Sin 22,4966 τ
= A Cos
.
y ϖτ = 1,245 x10−2 Cos 22,4966τ
ϖ2 ϖ τ 2,8 10 1 22,4966τ
..
Sin x
Sin A
Arah horizontal : Z = A Sin ϖτ = 5,042 x 10-4 Sin 23,3007 τ
= A Cos
.
Z ϖτ = 1,17 x10−2 Cos 23,3007τ
ϖ2 ϖ τ 2,74 10 1 23,3007τ
..
Sin x
Sin A
Z = − = − −
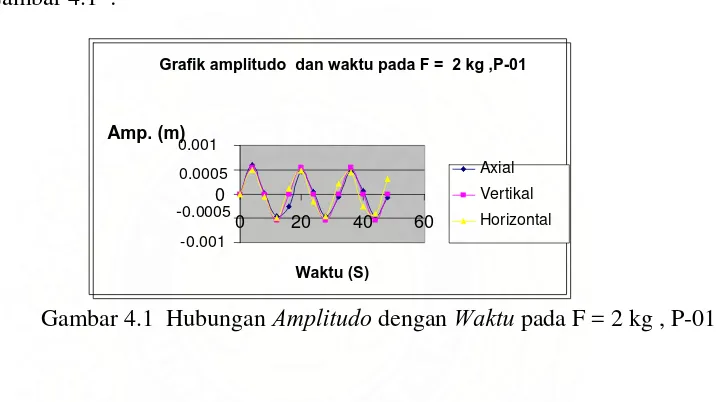
Dari rumus diatas dapat digambarkan hubungan simpangan dengan waktu
seperti Gambar 4.1 :
Grafik amplitudo dan waktu pada F = 2 kg ,P-01
-0.001 -0.00050
0.0005 0.
Amp. (m)
001
0 20 40 60
Waktu (S)
Axial Vertikal Horizontal
Gambar 4.1 Hubungan Amplitudo dengan Waktu pada F = 2 kg , P-01
Dari hasil pengukuran respon getaran yang diukur pada titik P-01 dengan
gaya 2 kg maka diperoleh data simpangan yang dapat ditampilkan pada Gambar 4.2:
[image:56.612.156.517.255.456.2]
Grafik simpangan vs waktu pada gaya F= 2 kg P-01
0 20 40 60
0 20 40 60
Waktu (s)
S
im
pangan (
u
m
)
Aksial Vertikal
Horizontal
Gambar 4.2 Hubungan Simpangan dengan Waktu pada gaya F = 2 kg; P-01
Dari Gambar 4.2 dapat dilihat bahwa simpangan pada arah vertikal
merupakan angka tertinggi dengan harga 52.5 x 10-6 m, sedangkan simpangan pada arah aksial 50.5 x 10-6 m dan arah horizontal 49.5 x 10-6 m.
Pengukuran kecepatan untuk titik P-01 dengan gaya F= 2 kg dapat digambarkan sebagai Gambar 4.3 :
Grafik kecepatan Vs Waktu pada Gaya F = 2 kg ,P-01
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
0 20 40 60
Waktu (s)
K
ecepat
an
(
m
/s)
Aksial Vertikal Horizontal
Gambar 4.3 Hubungan Kecepatan dengan Waktu pada Gaya F = 2 kg , P-01
Dari Gambar 4.3 dapat dilihat kecepatan dari arah vertikal lebih besar dengan nilai 1.4 x 10-2 m/s sedangkan arah aksial 1.155 x 10-2 m/s dan arah
horizontal 1.275 x 10-2 m/s.
Grafik percepatan Vs Waktu pada Gaya F = 2 kg, P-01
0 0.5 1 1.5 2 2.5 3 3.5
0 20 40 60
Waktu (s)
P
er
c
ep
a
tan
(
m
/s
2)
aksial Vertikal Horizontal
Gambar 4.4 Hubungan Percepatan dengan Waktu pada Gaya F = 2 kg ; P-01
Dari Gambar 4.4 dapat dilihat bahwapercepatan pada arah aksial lebih besar dari pada arah vertikal dan horizontal, dimana nilai tertinggi dari percepatan arah
aksial 2,90 x 10-2 m/s2 .Untuk arah vertikal 2,75 x10-2 m/s2 dan arah horizontal
2,630 x 10-2 m/s2 .
Pengukuran dengan frekuensi domain pada kondisi dan titik yang sama dapat digambarkan sebagai Gambar 4.5 :
Grafik Simpangan Vs Frekuensi pada Gaya F = 2 kg ,P-01
0 0.2 0.4 0.6 0.8 1
0 20 40 60
Frekuensi (HZ)
S
im
p
angan (
u
m
)
Aksial Vertikal Horizontal
Gambar 4.5 Hubungan Simpangan dengan Frekuensi pada Gaya F=2 kg ; P-01
Dari Gambar 4.5 dapat dilihat bahwa simpangan dengan frekuensi domain
pada arah aksial lebih tinggi dari pada arah vertikal dan horizontal, dimana pada arah
aksial untuk frekuensi 46 Hz diperoleh 0,80 x 10-6 m , vertikal 0,60 x 10 -6 m dan arah horizontal 0,60 x 10-6 m.
4.2.1.2 Pengukuran respon getaran pada landasan di F = 2 kg ; P-02 Dari hasil pengukuran respon getaran yang terjadi pada titik P-02 .
Tabel 4.3 Hasil pengukuran respon getaran pada landasan dengan gaya F = 2 kg ; P-02
Aksial Vertikal Horizontal
No Waktu
(detik) Dis
(um) Vel (cm/s)
Acc
(cm/s2)
Dis Vel Acc Dis Vel Acc
1 12 43.5 0.625 2.95 40.5 1.00 3.175 40.5 1.05 3.30
2 16 45.5 0.650 2.90 42.5 1.05 3.200 41.0 1.10 3.45
3 20 48.5 0.650 3.15 42.0 1.10 3.225 42.0 1.20 3.55
4 24 50.0 0.775 3.35 41.0 1.25 3.325 45.5 1.25 3.65
5 28 52.5 0.820 3.40 43.5 1.35 3.425 47.5 1.30 3.70
6 32 53.5 0.870 3.47 44.5 1.30 3.425 49.5 1.40 3.75
7 36 55.0 0.975 3.60 44.5 1.45 3.575 50.5 1.35 3.90
8 40 55.0 0.975 3.85 45.0 1.40 3.695 52.5 1.35 3.90
9 44 56.0 1.175 4.05 47.0 1.40 3.775 53.0 1.40 3.95
10 48 57.0 1.370 4.15 50.0 1.45 3.775 54.0 1.45 3.92
Rata-rata 51.7 0.889 3.48 44.05 1.275 3.459 47.6 1.28 3.71
Harga respon getaran pada Tabel 4.3 adalah penjumlahan harga rata-rata
Tabel 4.4 Amplitudo pada F= 2 kg ; P-02
Arah
Aksial Vertikal Horizontal
ϖ (rad/s) 25,9569 28,0222 27,9179
t
ϖ (rad) 8,5759 5,5297 5,9272
t (s) 0,3304 0,1973 0,2123
A (m) 3,57 x 10-4 4,75 x 10-4 4,78 x 10-4
Dari Tabel 4.4 dapat diplot dalam Gambar 4.6 amplitudo dan waktu dengan cara yang sama
Grafik amplitudo dengan waktu pada Gaya F = 2 kg; P-02
-0.001 -0.0005 0 0.0005 0.001
0 20 40 60
waktu(S) Amp.(m)
Axial Vertikal Horizontal
Gambar 4.6 Hubungan Amplitudo dengan Waktu pada F = 2 kg, P-02
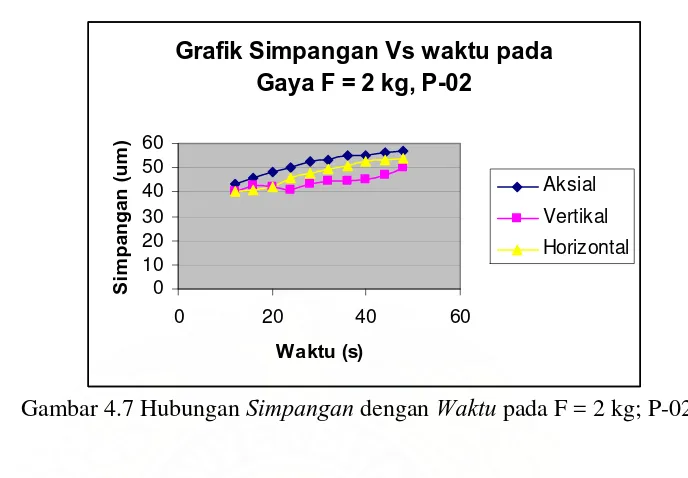
Dengan hasil pengukuran respon getaran yang diukur pada titik P-02 dengan
gaya F = 2 kg ,maka diperoleh data simpangan dengan waktu seperti Gambar 4.7 .
Grafik Simpangan Vs waktu pada Gaya F = 2 kg, P-02
0 10 20 30 40 50 60
0 20 40 60
Waktu (s)
S
im
pa
nga
n (
um
)
Aksial
Vertikal
Horizontal
Gambar 4.7 Hubungan Simpangan dengan Waktu pada F = 2 kg; P-02
Dari Gambar 4.7 dapat dilihat simpangan pada arah aksial merupakan angka
tertinggi dengan harga 57 x 10 -6 m , pada arah vertikal 50 x 10 -6 m dan arah
horizontal 54 x 10 -6 m.
Pengukuran kecepatan untuk titik P-02 dengan F= 2 kg dapat dilihat pada Gambar
4.8.
Grafik kecepatan Vs Waktu pada Gaya F = 2 kg ,P-02
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
0 20 40 60
Waktu (S)
K
ecep
at
an
(
m
/s)
Aksial
Vertikal
Horizontal
[image:61.612.114.489.382.686.2]Dari Gambar 4.8 dapat dilihat bahwa kecepatan pada arah vertikal dan
horizontal memiliki harga tertinggi sama-sama 1,45 x 10 -2 m/s pada arah horizontal
1,37 x 10 -2 m/s.
Pengukuran percepatan pada gaya F = 2 kg ; P-02 dapat digambarkan sebagai
Gambar 4.9 :
Grafik pe rce patan Vs Waktu pada Gaya F = 2 kg, P-02
0 1 2 3 4 5
0 20 40 60
Waktu (S)
P
er
cep
at
an
(
m
/s2)
Aks ial Vertikal Horizontal
Gambar 4.9Hubungan Percepatan denganWaktu padaF = 2 kg ; P-02 Dari Gambar 4.9 dapat dilihat bahwa percepatan pada arah aksial
merupakan angka tertinggi dengan harga 4,15 x 10 -2 m , sedangkan pada arah
vertikal 3,775 x 10 -2 m dan arah horizontal 3,95 x 10 -2 m.
Pengukuran dengan frekuensi domain pada kondisi dan titik yang sama dapat digambarkan sebagai Gambar 4.10.:
Gambar
Dokumen terkait
Houlin, et al (2010) dalam penelitiannya yang berjudul “Pengaruh Jumlah Bilah Terhadap Karakteristik Pompa Sentrifugal” menyatakan bahwa head, efesiensi dan NPSH R pompa
