BAB VI
DAFTAR PUSTAKA
1. Theraja. B.L. & A.K. Theraja.2005. “Electrical Technology”. S. Chand &
Company Ltd, New Delhi.
2. Wijaya, Mochtar. 2001. “Dasar-Dasar Mesin Listrik”, Penerbit Djambatan,
Jakarta.
3. Metha, V.K & Metha Rohit. 2002. “Principal of Electrical Machines”. S.
Chand & Company Ltd, New Delhi.
4. Ardiansyah. 2013. “Analisis Perbandingan Uji Regeneratif (Hopkinson)
Dengan Uji Retardasi Dalam Menentukan Rugi-rugi dan Efesiensi Motor
DC Penguatan Shunt”, Tugas Akhir Jurusan Teknik Elektro Fakultas
Teknik USU, Medan.
5. Sitorus, Raymond.A. 2014. “Studi Penentuan Efisiensi Motor Arus Searah
Berpenguatan Seri dengan Menggunakan Uji Medan (Field Test)”, Tugas
Akhir Jurusan Teknik Elektro Fakultas Teknik USU, Medan.
6. Sembiring,Ija.2007. “Studi Perbandingan Penggunaan Rheostat dan
Auto-Transformator Untuk Pengaturan Kecepatan Motor DC Seri”, Tugas Akhir
Jurusan Teknik Elektro Fakultas Teknik USU, Medan.
7. U.S Department of Energy. 1992. DOE Fundamentals Handbook Electrical
Scince, Washington, D.C, 1992.
8. Wildi, Theodore, “Electrical Mechines,Drives and Power System”, Prentice
9. Jaya,Kaban.2013. “Studi Penentuan Rugi-Rugi Daya Motor Arus Searah
Kompon Pendek Dengan Metode Reterdasi”,.Medan:Departemen Teknik
Elektro, Fakultas Teknik, USU.
10.Fitzgerald Kingslay JR, “Mesin-Mesin Listrik”, Edisi Keenam, Penerbit
Erlangga, Jakarta, 1993.
11.Deshpande,M.V,“Electric Motors Aplications And Control”,London,1984.
12.Chapman, Stephen J, “Electrical Machinery Fundamental”, Edisi 4,Mc
Graw-Hill Company, Singapure, 2005.
13.Supriyadi, Eko. “Motor Listrik DC”, 22 Agustus 2014.
BAB III
METODE PENELITIAN
3.1 Umum
Metode penelitian merupakan cara yang harus ditempuh dalam kegiatan
penelitian agar hasil yang akan dicapai dari suatu penelitian dapat memenuhi secara
ilmiah. Dengan demikian, maksud dari penyusunan metode ini agar peneliti dapat
menghasilkan suatu kesimpulan yang dapat dipertanggung jawabkan secara ilmiah.
Metode penelitian ini mencakup beberapa hal diantaranya adalah penetapan tempat
dan waktu penelitian, penetapan objek penelitian, penetapan variabel penelitian,
metode pengumpulan data, dan teknik analisa data.
3.2 Waktu dan Tempat Penelitian
Penelitian dilaksanakan pada bulan Oktober 2014 di Laboratorium Konversi
Energi Listrik, Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera
Utara, Medan.
3.3 Objek Penelitian
Objek dari penelitian ini yaitu menganalisa motor arus searah kompon
panjang dengan pengukuran rugi-rugi daya dan efisiensi menggunakan metode
perlambatan (retardation test).
3.4 Variasi Pengukuran
Dalam percobaan ini, variasi pengukuran dilakukan untuk menentukan
1. Motor DC penguatan kompon panjang pada keadaan ¼ beban penuh
2. Motor DC penguatan kompon panjang pada keadaan ½ beban penuh
3. Motor DC penguatan kompon panjang pada keadaan ¾ beban penuh
4. Motor DC penguatan kompon panjang pada keadaan beban penuh
3.5 Teknik Analisa Data
Dalam penelitian ini teknik analisa data yang digunakan adalah analisis
matematis yang kemudian dipakai untuk mendapatkan hasil penelitian. Analisis ini
adalah melakukan perhitungan-perhitungan berdasarkan rumus yang berlaku di
dalam perhitungan untuk rugi-rugi dan juga efisiensi motor dc penguatan kompon
panjang dengan menggunakan data-data yang diperoleh dari hasil percobaan
dengan metode perlambatan (retardation test).
Adapun perhitungan yang dilakukan adalah menggunakan formulasi
sebagai berikut:
1. Perhitungan Momen Inersia Motor DC Kompon Panjang
Sebagaimana telah diterangkan dalam sub bab sebelumnya bahwa momen
inersia jangkar motor dapat dihitung dengan persamaan:
� = � � −
Dimana:
J =Momen Inersia jangkar motor (Kgm²)
J1 = �² (Kgm²)
t1 = selang waktu yang dibutuhkan untuk penurunan kecepatan jangkar
motor dengan rotor sendiri dalam kondisi tanpa eksitasi (detik)
t2 = selang waktu yang dibutuhkan untuk penururan kecepatan jangkar
motor dengan roda pejal dalam kondisi tanpa eksitasi (detik)
Harga J1 diketahui begitu juga dengan t1 dan t2 didapat dari percobaan,
dengan demikan momen inersia jangkar (J) dapat ditentukan. Sesudah mengetahui
nilai momen inersia jangkar (J) dari perhitungan seperti persamaan 2.30 dan nilai
perubahan (dW/dt) atau dn/dt dari percobaan, maka rugi-rugi rotasi pada motor dc
kompon panjang dapat ditentukan.
2. Perhitungan Rugi-rugi Rotasi Motor DC Kompon Panjang
Dengan diketahuinya momen inersia jangkar motor (J), maka rugi-rugi
rotasi motor dapat dihitung sebagai berikut:
Untuk rugi-rugi mekanis (gesek dan angin)
Wg+a = 0,011x J x n x atau Wg+a = 0,011x (J+J1) x n x
Untuk rugi-rugi rotasi (gesek, angin dan besi)
Wrot = 0,011x J x n x atau Wrot = 0,011x (J+J1) x n x
Untuk rugi-rugi inti
3. Perhitungan Rugi-rugi Konstan (Wc)
Wc = Wrot + Wsh dimana; Wsh = (Ish)² x Rsh
4. Rugi-rugi Total (∑w) Motor DC Kompon Panjang
∑w = Wc + Wa + Wsr + Wbd
Dimana:
Wa = Ia² x Ra (Rugi daya armature)
Wse = Ia² x Rs (Rugi daya kumparan seri)
Wbd= 2 x Ia (Rugi jatuh tegangan sikat)
5. Perhitungan Efesiensi Motor DC Kompon Panjang
Efesiensi = � −∑� ��− ��
�
Efesiensi =
+∑� ��− ��
m = [ −∑
� ]� %
3.6 Alat dan Bahan Pengujian
Pengukuran ini memerlukan alat dan bahan sebagai berikut:
1. Satu unit Motor DC TYP Gd 110/110 G-Mot Nr.7983733, dengan rating:
Tegangan Nominal =220 V
P=1,2 KW
IL = 7,1 A
Ish = 0,177 A
n= 1400 Rpm
Tahanan jangkar (GA-HB)= 3,8 ohm
Tahanan medan shunt (J-K) = 1243 ohm
2. Satu unit Generator DC TYP Gf 110/140 Penguatan Bebas
P =2 KW
Ish = 0,64 A
IL = 9,1A
N = 1500 Rpm
Tahanan medan shunt (J-K) = 333,33 ohm
Tahanan Jangkar (GA-HB) = 1,5 ohm
Tahanan medan seri (E-F) = 0,48 ohm
3. Rangkaian kontrol yang terdiri dari Magnetic Contactor, Push Button
ON/OFF dan kabel
4. Roda Pejal dengan massa 6,5 Kg, diameter 26 cm
Gambar 3.1 Roda Pejal
5. Instrumen pengukuran terdiri dari Ampermeter, Voltmeter, Tachometer,
dan Stopwatch
6. Power Suplai terdiri dari PT AC Tiga Phasa, PT DC,
3.7 Rangkaian dan Prosedur Pengujian
Pada metode Perlambatan (Retardation Test) ini, terdiri dari beberapa
urutan percobaan yaitu :
1. Percobaan Uji Retardasi dengan rotor sendiri tanpa eksitasi
2. Percobaan Uji Retardasi dengan roda pejal tanpa eksitasi
3. Percobaan Uji Retardasi dengan rotor sendiri eksitasi penuh
4. Percobaan Uji Retardasi dengan roda pejal eksitasi penuh
5. Percobaan pembebanan motor dc kompon panjang pada metode Retardasi
6. Percobaan pengukuran Parameter, yaitu : pengukuran tahanan jangkar
motor, pengukuran tahanan medan shunt, dan pengukuran tahanan medan
seri
Rangkaian kontrol dalam uji retardasi ditunjukkan pada gambar dibawah ini
:
Gambar 3.2 Rangkaian Kontrol
3.7.1 Percobaan Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi
1) Rangkaian percobaan disusun seperti gambar berikut.
AC
P
T
D
C
V1 A1 S1 A2 J K N A3 E F M GA HBGambar 3.3 Rangkaian Percobaan Uji Retardasi dengan Rotor Sendiri tanpa
Eksitasi
2) Posisi power suplai dan tahanan variabel RSf pada keadaan minimum dan
saklar S ditutup lalu tekan tombol ON.
3) Tegangan terminal motor dinaikkan dengan mengatur PTDC hingga
pembacaan tachometer pada kecepatan nominal motor yaitu 1400 rpm dan
pembacaan ampermeter A2 dijaga konstan.
4) Atur tahanan variabel RSf hingga putaran motor mencapai putaran 1450 rpm.
5) Motor dibiarkan berputar beberapa saat pada kecepatan 1450 rpm, lalu
bersiap-siap menekan tombol OFF dan pada saat bersamaan stopwatch juga
dijalankan. Maka motor akan mengalami perlambatan, amati penurunan
1350 pada stopwatch dicatat. Percobaan poin 2 sampai 5 diulang kembali
sebanyak 10 kali percobaan.
3.7.2 Percobaan Uji Retardasi dengan Roda Pejal tanpa Eksitasi
1) Rangkaian percobaan disusun seperti gambar rangkaian percobaan dibawah
ini. Roda pejal dikopel ke ujung poros rotor lalu dikunci.
AC
P
T
D
C
V1 A1 S1 A2 J K N N A3 E F Rsf M GA HBGambar 3.4 Rangkaian Percobaan Uji Retardasi dengan Roda Pejal tanpa
Eksitasi
2) Posisi power suplai dan tahanan varibel RSf pada keadaan minimum dan
saklar S ditutup lalu tekan tombol ON
3) Tegangan terminal motor dinaikkan dengan mengatur PTDC hingga
pembacaan tachometer mencapai kecepatan nominal motor yaitu 1400 rpm
dan ampermeter A2 dijaga konstan.
5) Motor dibiarkan berputar beberapa saat pada kecepatan 1450 rpm, lalu
bersiap-siap menekan tombol OFF dan pada saat bersamaan stopwatch juga
dijalankan. Maka motor akan mengalami perlambatan, amati penurunan
kecepatan motor. Waktu penurunan kecepatan motor dari 1450 rpm sampai
1350 pada stopwatch dicatat. Percobaan poin 2 sampai 5 diulang kembali
sebanyak 10 kali percobaan.
3.7.3 Percobaan Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh
1) Rangkaian percobaan disusun seperti gambar berikut.
AC
P
T
D
C
V1 A1 S1 A2 J K A3 N E F N Rsf M GA HBGambar 3.5 Rangkaian Percobaan Uji Retardasi dengan Rotor Sendiri Eksitasi
Penuh
2) Posisi power suplai dan tahanan variabel RSf pada keadaan minimum dan
saklar S ditutup lalu tekan tombol ON.
3) Tegangan terminal motor dinaikkan dengan mengatur PTDC hingga
pembacaan tachometer mencapai kecepatan nominal motor yaitu sebesar
4) Atur tahanan variabel RSf hingga putaran motor mencapai putaran 1450 rpm.
5) Motor dibiarkan berputar beberapa saat pada kecepatan 1450 rpm, lalu
bersiap-siap menekan tombol OFF dan pada saat bersamaan stopwatch juga
dijalankan. Maka motor akan mengalami perlambatan, amati penurunan
kecepatan motor. Waktu penurunan kecepatan motor dari 1450 rpm sampai
1350 pada stopwatch dicatat. Percobaan poin 2 sampai 5 diulang kembali
sebanyak 10 kali percobaan.
3.7.4 Percobaan Uji Retardasi dengan Roda Pejal Eksitasi Penuh
1) Rangkaian percobaan disusun seperti gambar rangkaian percobaan dibawah
ini. Roda pejal dikopel ke ujung poros rotor lalu dikunci.
AC
P
T
D
C
V1 A1 S1 A2 J K A3 N E F N Rsf M GA HBGambar 3.6 Rangkaian Percobaan Uji Retardasi dengan Roda Pejal
Eksitasi Penuh
2) Posisi power suplai dan tahanan varibel RSf pada keadaan minimum dan
3) Tegangan terminal motor dinaikkan dengan mengatur PTDC hingga
pembacaan tachometer mencapai kecepatan nominal yaitu 1400 rpm dan
ampermeter A2 dijaga konstan.
4) Atur tahanan variabel RSf hingga putaran motor mencapai putaran 1450 rpm.
5) Motor dibiarkan berputar beberapa saat pada kecepatan 1450 rpm, lalu
bersiap-siap menekan tombol OFF dan pada saat bersamaan stopwatch juga
dijalankan. Maka motor akan mengalami perlambatan, amati penurunan
kecepatan motor. Waktu penurunan kecepatan motor dari 1450 rpm sampai
1350 pada stopwatch dicatat. Percobaan poin 2 sampai 5 diulang kembali
sebanyak 10 kali percobaan.
3.7.5 Pengukuran Tahanan Jangkar Motor
1) Rangkaian percobaan disusun seperti gambar berikut.
AC
P
T
D
C
V
A S1
M GA
HB
Gambar 3.7 Rangkaian Percobaan Pengukuran Tahanan Jangkar
3) Saklar S ditutup, lalu tegangan PTDC dinaikkan sampai pembacaan
ampermeter menunjukkan arus nominal jangkar 7,1 Ampere.
4) Pembacaan Voltmeter dan Ampermeter dicatat. Lalu nilai tahanan jangkar
dihitung dengan membagi nilai tegangan dengan arus dari hasil percobaan.
3.7.6 Pengukuran Tahanan Medan Shunt Motor
1) Rangkaian percobaan disusun seperti gambar di bawah ini.
AC
P
T
D
C
V
A
S1J
K
Gambar 3.8 Rangkaian Percobaan Pengukuran Tahanan Medan Shunt
2) Power suplai pada kondisi minimum.
3) Saklar S ditutup, lalu tegangan PTDC dinaikkan sampai pembacaan
ampermeter menunjukkan arus nominal 0,177 ampere.
4) Kemudian pembacaan voltmeter dan ampermeter dicatat. Lalu nilai tahanan
jangkar dihitung dengan membagi nilai tegangan dengan arus dari hasil
3.7.7 Pengukuran Tahanan Medan Seri Motor
1) Rangkaian percobaan disusun seperti gambar di bawah ini.
AC
P
T
D
C
V
A
S1E
F
Gambar 3.9 Rangkaian Percobaan Pengukuran Tahanan Medan Seri
2) Power suplai pada kondisi minimum.
3) Saklar S ditutup, lalu tegangan PTDC dinaikkan sampai pembacaan
ampermeter menunjukkan arus nominal 5 ampere.
4) Kemudian pembacaan voltmeter dan ampermeter dicatat. Lalu nilai tahanan
jangkar dihitung dengan membagi nilai tegangan dengan arus dari hasil
percobaan.
3.7.8 Percobaan Pembebanan Motor DC Kompon Panjang dengan Metode
Retardasi
1) Rangkaian percobaan disusun seperti gambar dibawah ini. Semua power
AC P T D C 1 V1 A1 S1 A2 J K A3 E F M GA HB G GA HB A4 V1 PTDC 2 AC S2 S3 J K RL A5
Gambar 3.10 Rangkaian Percobaan Pembebanan Motor DC Kompon Panjang
dengan Metode Retardasi
2) Saklar S1 ditutup lalu tegangan PTDC dinaikkan perlahan-lahan hingga
tegangan motor V1 mencapai 200 volt lalu.
3) Saklar S2 ditutup lalu arus medan generator dinaikkan dengan PTDC
sampai nominal 0,64 Ampere.
4) Saklar S3 ditutup kemudian beban generator diatur dengan menggeser
tahanan variabel RL dari ¼ beban penuh, ½ beban penuh, ¾ beban penuh
5) Pembacaan voltmeter V1, ampermeter A1, A2 dan A3 serta putaran motor
dicatat pada kondisi-kondisi pembebanan tersebut, sehingga diperoleh data
BAB IV
HASIL DAN PEMBAHASAN
4.1
Data Pengujian
Dari hasil pengujian di atas diperoleh data hasil percobaan sebagai berikut :
1. Uji Retardasi dengan Rotor Sendiri Tanpa Eksitasi (dn = 1450-1350)
No. Percobaan dt1 (s) No.Percobaan dt1 (s)
1 0,81 6 0,83
2 0,87 7 0,79
3 0,95 8 1,01
4 0,98 9 0,82
5 0,85 10 0,91
dt1 rata-rata = 0,88
Tabel 4.1 Data Percobaan Uji Retardasi dengan Rotor Sendiri Tanpa Eksitasi
2. Uji Retardasi dengan Roda Pejal tanpa Eksitasi (dn = 1450-1350)
No. Percobaan dt1 (s) No.Percobaan dt1 (s)
1 2,86 6 2,55
2 2,06 7 2,49
3 2,80 8 2.03
4 2,69 9 2,54
5 2,87 10 1,98
dt1 rata-rata = 2,43
3. Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh (dn = 1450-1350)
No. Percobaan dt1 (s) No.Percobaan dt1 (s)
1 0,37 6 0,34
2 0,38 7 0,30
3 0,28 8 0,36
4 0,39 9 0,35
5 0,40 10 0,33
dt1 rata-rata = 0,35
Tabel 4.3 Data Percobaan Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh
4. Uji Retardasi dengan Roda Pejal Eksitasi Penuh (dn = 1450-1350)
No. Percobaan dt1 (s) No.Percobaan dt1 (s)
1 0,80 6 1,04
2 0,86 7 0,90
3 0,94 8 1,01
4 0,99 9 0,98
5 1,03 10 0,86
dt1 rata-rata = 0,94
Tabel 4.4 Data Percobaan Uji Retardasi dengan Roda Pejal Eksitasi Penuh
5. Pengukuran Tahanan Jangkar Motor
V (volt) I (Ampere) R= (ohm)
27 7,1 3,8
6. Pengukuran Tahanan Medan Shunt
V (volt) I (Ampere) R= (ohm)
220 0,177 1243
Tabel 4.6 Data Percobaan Pengukuran Tahanan Medan Shunt
7. Pengukuran Tahanan Medan Seri
V (volt) I (Ampere) R= (ohm)
3 5 0,6
Tabel 4.7 Data Percobaan Pengukuran Tahanan Medan Seri
8. Pengujian Pembebanan Motor DC Kompon Panjang pada Metode
Perlambatan
Beban Vt IL Ia Ish N
¼ beban penuh 200 2,18 2.02 0,16 1380
½ beban penuh 200 4,20 4,2 0,16 1350
¾ beban pehuh 200 5,76 5,6 0,16 1310
Beban penuh 200 7,06 6,9 0,16 1290
Tabel 4.8 Data Hasil Pengujian Pembebanan Motor DC Kompon Panjang pada
9. Data Pembebanan Generator DC saat dikopel pada Pengujian Pembebanan
Motor DC Kompon Panjang pada Metode Perlambatan
Beban Vt Ia Ish N
¼ beban penuh 185 2.40 0,46 1380
½ beban penuh 170 4,64 0,46 1350
¾ beban pehuh 156 5,66 0,46 1310
Beban penuh 138 8,59 0,46 1290
Tabel 4.9 Data Hasil Pembebanan Generator DC saat dikopel dengan Motor DC
Kompon Panjang pada Metode Perlambatan
4.2 Analisa Data
4.2.1 Umum
Dari data hasil pengukuran parameter motor dc kompon panjang pada tabel
data hasil percobaan 4.5, 4.6 dan 4.7 diketahui besarnya tahanan jangkar motor
sebesar 3.8 ohm, tahanan kumparan medan seri sebesar 0,6 ohm dan tahanan medan
shunt sebesar 1243 ohm. Untuk menaikkan putaran motor dc kompon panjang,
maka tahanan Rfs ditempatkan seri terhadap kumparan jangkar yang besar
tahanannya sebesar 100 Ohm. Sedangkan tahanan RL yang digunakan beban lampu
pijar 20x45 Watt dan dikelompokkan seri menjadi 4 bagian menjadi 5x45 Watt,
dimana untuk mencapai beban penuh motor nilai RL akan terus berubah. Dalam
pengujian pembeban motor dc kompon panjang, penulis menentukan pembagian
dari ¼ beban penuh sampai beban penuh.
4.2.2 Perhitungan Momen Inersia Motor DC Kompon Panjang
Pada data hasil pengujian tabel 4.1 dan tabel 4.2 dapat ditentukan besarnya
sebelumnya, dimana momen inersia jangkar motor dapat dihitung dengan
persamaan :
� = � � −
Dimana:
J =Momen Inersia jangkar motor (Kgm²)
J1 =Momen Inersia roda pejal yang dihitung dengan persamaan
J1 = �² (Kgm²)
t1 = selang waktu yang dibutuhkan untuk penurunan kecepatan jangkar
motor dengan rotor sendiri dalam kondisi tanpa eksitasi (detik)
t2 = selang waktu yang dibutuhkan untuk penururan kecepatan jangkar
motor dengan roda pejal dalam kondisi tanpa eksitasi (detik)
Untuk J1 :
J1 = �²
J1 = 6,5(0,13)²
J1 = 3,25(0,13)²
J1 = 0,0549
J1 = 0,055 Kgm²
� = � � −
J = 0,055x ,
, − ,
J = 0,055x ,
,
J = 0,055x0,567
J = 0,0312 Kgm²
4.2.3 Perhitungan Rugi-Rugi Rotasi Motor DC Kompon Panjang
Setelah diketahui momen inersia jangkar motor maka dapat dihitung
rugi-rugi rotasi motor sebagai berikut :
Berdasarkan data hasil percobaan pada tabel 4.1 atau 4.2 dapat dicari rugi-rugi
gesek dan angin motor, yaitu :
Wg+a = 0.011x J x n x atau Wg+a = 0,011x (J+J1) x n x
Wg+a = 0.011x J x n x
= 0,011x0,0312x1400x −
,
= 0,011x0,0312x1400x113,64
= 54,60 Watt
Atau :
W’g+a = 0,011x (J+J1) x n x
= 0,011x(0,0312+0,055)x1400x −
= 0,011x0,0862x1400x41,15 = 54,63 Watt
Jadi :
Wg+a rata-rata = W+W′
= , + ,
= ,
= 54,61 Watt
Dari hasil perhitungan diatas diperoleh nilai rugi-rugi gesek dan angin
motor rata-rata 54,61 Watt. Dan dari data hasil percobaan pada tabel 4.3 atau 4.4
dapat dicari rugi-rugi rotasi motor sebagai berikut :
Wrot = 0,011x J x n x atau Wrot = 0,011x (J+J1) x n x
Wrot = 0,011x J x n x
= 0,011x0,0312x1400x −
,
= 0,011x0,0312x1400x285,72
=137,28 Watt
Atau :
W’rot = 0,011x (J+J1) x n x
= 0,011x(0.0312+0,055)x1400x −
,
= 141,21 Watt
Jadi :
Wrot rata-rata = + ′
= , + ,
= ,
= 139,25 Watt
Berdasarkan perhitungan diatas didapat rugi-rugi rotasi motor rata-rata 139,25
Watt. Jadi dapat dihitung rugi-rugi inti di dalam motor, yaitu :
Winti = Wrot-Wg+a
= 139,25-54,61
= 84,64 Watt
4.2.4 Perhitungan Rugi-Rugi Konstan (Wc)
Wc = Wrot + Wsh, dimana : Wsh = (Ish)²x(Rsh)
= (0,177)²(1243)
= 38,94 Watt
Maka :
Wc = 139,25+38.94
4.2.5 Perhitungan Rugi-Rugi dan Efisiensi Motor DC Kompon Panjang
1) Pada Saat Beban ¼ Beban Penuh (IL = ± 2,18 Ampere)
Data-data motor DC kompon panjang pada kondisi ¼ beban penuh adalah sebagai
berikut :
Vt = 200 Volt
IL = 2,18 Ampere
Ia = 2,02 Ampere
Ish = 0,16 Ampere
n = 1380 Rpm
Berdasarkan data tersebut diatas maka dapat dihitung rugi-rugi motor DC kompon
panjang pada situasi ¼ beban penuh yaitu :
Pin = Vt.IL = 200 x 2,18 = 436 Watt
Wc = Wrot + Wsh = 178,20 Watt
Wa = Ia².Ra = (2,02)² x 3,8 = 15,50 Watt
Wsr = Ia².Rs = (2,02)² x 0,6 = 2,45 Watt
Wbd = 2.Ia = 2 x 2,02 = 4,04 Watt
Maka rugi-rugi total motor DC kompon panjang adalah :
∑W = Wc + Wa + Wsr + Wbd
= 178,20+15,50+2,45+4,04
Jadi efisiensi Motor DC Kompon Panjang pada kondisi ¼ beban penuh adalah :
m = [1-∑�
� ] x 100%
= [1- , ]x100%
= [1-0,4591]x100%
= 0,5408x100%
= 54,08%
2) Pada Saat Beban ½ Beban Penuh ( IL = 4,36 Ampere )
Data-data motor DC kompon panjang pada kondisi ½ beban penuh adalah sebagai
berikut :
Vt = 200 Volt
IL = 4,36 Ampere
Ia = 4,20 Ampere
Ish = 0,16 Ampere
n = 1350 Rpm
Berdasarkan data tersebut diatas maka dapat dihitung rugi-rugi motor DC kompon
panjang pada situasi ½ beban penuh yaitu :
Pin = Vt.IL = 200 x 4,36 = 872 Watt
Wa = Ia².Ra = (4,20)² x 3,8 = 67,03 Watt
Wsr = Ia².Rs = (4,20)² x 0,6 = 10,58 Watt
Wbd = 2.Ia = 2 x 4,20 = 8,40 Watt
Maka rugi-rugi total motor DC kompon panjang adalah :
∑W = Wc + Wa + Wsr + Wbd
= 178,20+67,03+10,58+8,40
= 264,21 Watt
Jadi efisiensi Motor DC Kompon Panjang pada kondisi ¼ beban penuh adalah :
m = [1-∑�
� ] x 100%
= [1- , ]x100%
= [1-0,3030]x100%
= 0,6970x100%
=69,70%
3) Pada Saat Beban ¾ Beban Penuh ( IL = 5,76 Ampere )
Data-data motor DC kompon panjang pada kondisi ¾ beban penuh adalah sebagai
berikut :
Vt = 200 Volt
Ia = 5,60 Ampere
Ish = 0,16 Ampere
n = 1310 Rpm
Berdasarkan data tersebut diatas maka dapat dihitung rugi-rugi motor DC kompon
panjang pada situasi ½ beban penuh yaitu :
Pin = Vt.IL = 200 x 5,76 = 1152 Watt
Wc = Wrot + Wsh = 178,20 Watt
Wa = Ia².Ra = (5,60)² x 3,8 = 119,17 Watt
Wsr = Ia².Rs = (5,60)² x 0,6 = 18,81 Watt
Wbd = 2.Ia = 2 x 5,60 = 11,20 Watt
Maka rugi-rugi total motor DC kompon panjang adalah :
∑W = Wc + Wa + Wsr + Wbd
= 178,20+119,17+18,81+11,20
= 327,38 Watt
Jadi efisiensi Motor DC Kompon Panjang pada kondisi ¼ beban penuh adalah :
m = [1-∑�
� ] x 100%
= [1- , ]x100%
= [1-0,2841]x100%
4) Pada Saat Beban Penuh ( IL = 7,06 Ampere )
Data-data motor DC kompon panjang pada kondisi ½ beban penuh adalah sebagai
berikut :
Vt = 200 Volt
IL = 7,06 Ampere
Ia = 6,90 Ampere
Ish = 0,16 Ampere
n = 1290 Rpm
Berdasarkan data tersebut diatas maka dapat dihitung rugi-rugi motor DC kompon
panjang pada situasi ½ beban penuh yaitu :
Pin = Vt.IL = 200 x 7,06 = 1412 Watt
Wc = Wrot + Wsh = 178,20 Watt
Wa = Ia².Ra = (6,90)² x 3,8 = 180,92 Watt
Wsr = Ia².Rs = (6,90)² x 0,6 = 28,57 Watt
Wbd = 2.Ia = 2 x 6,90 = 13,80 Watt
Maka rugi-rugi total motor DC kompon panjang adalah :
∑W = Wc + Wa + Wsr + Wbd
= 178,20+180,92+28,57+13,80
= 401,50 Watt
m = [1-∑�
� ] x 100% = [1-,
]x100%
= [1-0,2844]x100%
= 0,7156x100%
=71,56%
Dilihat dari hasil analisa data rugi-rugi dan efisiensi motor DC Kompon Panjang
dengan metode Perlambatan (Retardation Test) dapat disusun pada tabel berikut :
No. Vt(Volt) IL(A) Ia(A) Ish(A) n(rpm) Pin(Watt) ∑W(Watt) m(%)
1 200 2,18 2,02 0,16 1380 436 200,19 54,08
2 200 4,36 4,20 0,16 1350 872 264,21 69,70
3 200 5,76 5,60 0,16 1310 1152 327,38 71,58
[image:31.595.156.468.556.716.2]4 200 7,06 6,90 0,16 1290 1412 401,50 71,56
Tabel 4.10 Data Rugi-rugi dan Efisiensi Motor DC Kompon Panjang dengan
Beban Bervariasi pada Metode Retardasi
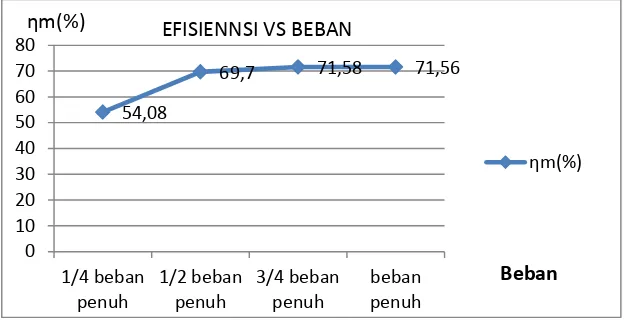
Berikut ini adalah grafik antara efisiensi terhadap perubahan beban
Gambar 3.11 Grafik antara Efisiensi terhadap Beban
54,08
69,7 71,58 71,56
0 10 20 30 40 50 60 70 80 1/4 beban penuh 1/2 beban penuh 3/4 beban penuh beban penuh ηm(%) EFISIENNSI VS BEBAN
Beban
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari pembahasan yang telah dibuat, maka diperoleh kesimpulan sebagai
berikut :
1. Dari hasil pengujian berbeban Motor DC Kompon Panjang dengan metode
Perlambatan (Retardation Test) dapat disimpulkan efisiensi terbaik didapat
pada pada kondisi ¾ beban penuh yaitu 71,58% dan efisiensi terendah
terjadi pada saat kondisi ¼ beban penuh yaitu 54,08%.
2. Metode Perlambatan terbukti dapat digunakan untuk mendapatkan besar
efisiensi dari suatu motor dc kompon panjang, sehingga diketahui
kemampuan motor tersebut.
3. Dari hasil pengujian Motor DC Kompon Panjang dengan metode
Perlambatan (Retardation Test) didapat rugi-rugi inti sebesar 84,64 Watt
dan rugi-rugi terbesar terjadi pada kondisi beban penuh sebesar 401,50
Watt.
5.2 Saran
Berikut merupakan beberapa saran yang bisa diberikan dari hasil tugas akhir
ini, yakni :
1. Pada pengujian selanjutnya disarankan agar tahanan variabel yang
2. Disarankan untuk menguji motor DC lainnya
3. Disarankan untuk penelitian berikutnya menggunakan sistem yang otomatis
pada saat memadukan penurunan putaran dengan penghitungan waktu,
sehingga data yang didapat lebih akurat.
BAB II
TINJAUAN PUSTAKA
2.1 Motor Arus Searah
Motor arus searah (DC) merupakan perangkat elektromagnetis yang
mengubah energi listrik arus searah menjadi energi mekanis yang biasanya
digunakan, misalnya; memutar impeller pompa, fan atau blower, menggerakkan
kompresor, mengangkat bahan, dan lain-lain. Mesin yang bekerja baik sebagai
generator DC dalam kenyataannya akan bekerja baik juga sebagai motor DC,
karena hampir pada semua prinsip pengoperasiannya motor arus searah identik
dengan generator arus searah. Motor juga dimanfaatkan pada peralatan rumahan
(mixer, bor listrik, fan angin) dan juga dibidang industri.
Motor arus searah disuplai tegangan yang searah pada kumparan medan
untuk diubah menjadi energi mekanik. Kumparan medan pada motor arus searah
dinamakan stator yaitu bagian yang diam (tidak berputar) dan kumparan jangkar
dinamakan rotor yaitu bagian yang berputar. Terjadinya putaran pada kumparan
jangkar dan pada medan magnet yang menimbulkan tegangan (GGL) yang arahnya
berubah-ubah pada setiap setengah putaran yang menimbulkan tegangan bolak
balik apabila bekerja sebagai generator. Jadi pada prinsip kerja generator arus
searah adalah dengan membalik phasa tegangan dari gelombang yang mempunyai
nilai positif dengan menggunakan komutator.
Proses pengkonversian energi listrik menjadi energi mekanik berlangsung di
antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi
magnet yang arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar
akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi
magnet tersebut akan menimbulkan suatu gaya sehingga menimbulkan torsi.
Motor arus searah biasanya digunakan terutama untuk melayani beban
dengan torsi start yang besar dan memiliki efisiensi yang tinggi sehingga lebih
unggul bila dibandingkan dengan motor induksi ataupun motor sinkron. Pada
penggunaannya motor arus searah harus disesuaikan dengan kebutuhan agar
ekonomis dan efisiensi. Untuk memenuhi semuannya ini, maka diperlukan motor
arus searah yang memiliki efisiensi dan torsi tinggi. Ketika motor arus searah
dibebani, maka fluksi akan berkurang dan amper-turn medan akan berkurang juga.
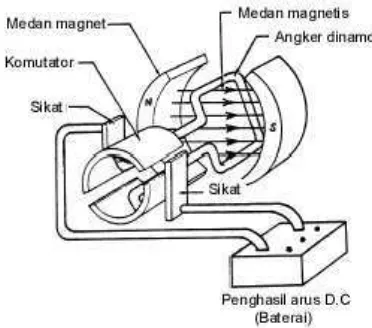
Hal tersebut diakibatkan oleh karena adanya reaksi jangkar. Bentuk motor arus
paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas diantara
[image:35.595.177.363.483.647.2]kutub-kutub magnet permanen.
Gambar 2.1 Motor DC Sederhana
Catu tegangan DC dari baterai menuju lilitan melalui sikat yang menyentuh
lilitan pada gambar di atas disebut angker dinamo yaitu sebutan untuk komponen
yang berputar diantara medan magnet.
2.2 Kontruksi Motor Arus Searah
Motor arus searah secara umum dibagi atas dua bagian, yakni bagian yang
diam (stator) dan bagian yang berputar (rotor). Berikut gambar kontruksi motor arus
searah secara utuh tampak luar.
Gambar 2.2(a) Kontruksi Motor Arus Searah
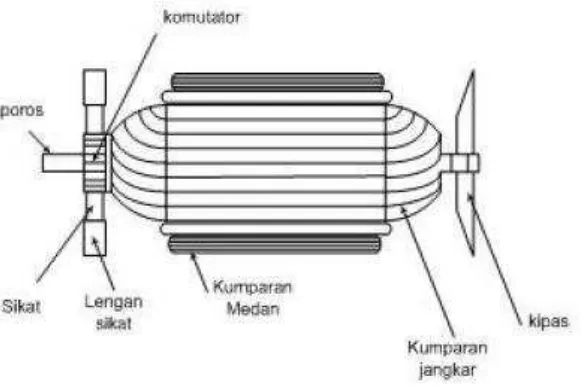
Motor arus searah bagian stator dan rotor tampak dalam akan ditunjukkan pada
[image:36.595.182.473.286.481.2]Gambar 2.2 (b) Kontruksi Stator dan Rotor Motor Arus Searah
Gambar 2.2 (c) Kontruksi Rotor Motor Arus Searah
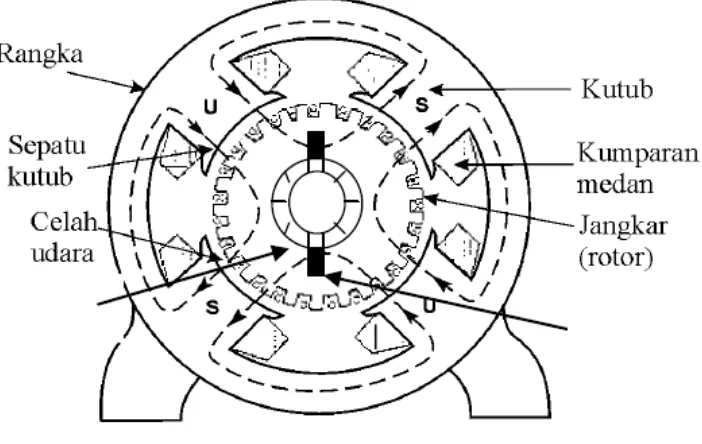
Bagian-bagian dari motor arus searah seperti yang ada pada gambar diatas antara
lain:
1. Rangka atau Gandar
Rangka motor arus searah merupakan tempat menempelnya sebagian besar
[image:37.595.142.493.95.317.2] [image:37.595.169.440.396.530.2]pendukung mekanik secara ke keseluruhan dan membawa fluks magnetik
yang dihasilkan oleh kutub-kutub magnet. Umumnya terbuat dari baja tuang
(cast steel) untuk mesin-mesin besar dan besi tuang (cast iron) untuk mesin
kecil.
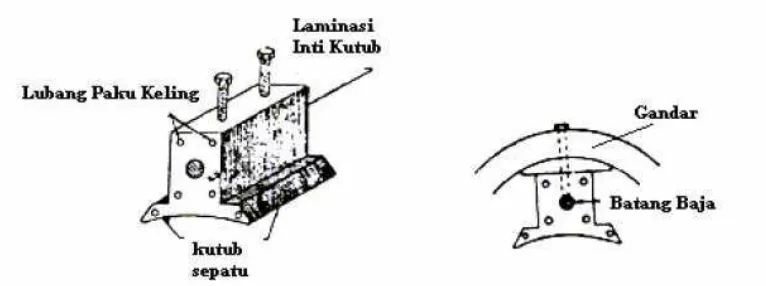
2. Kutub Medan
Kutub Medan terdiri dari inti kutub dan sepatu kutub, dimana sepatu kutub
yang berdekatan dengan celah udara dibuat lebih besar dari badan inti.
Adapun fungsi dari sepatu kutub adalah menyebarkan fluks pada celah
udara dan juga mengurangi reluktansi jalur magnet itu karena sepatu kutub
merupakan bidang lebar.
Gambar 2.2 (d) Kontruksi Inti Kutub dan Penempatannya
3. Sikat
Sikat merupakan penghubung atau jembatan arus untuk mengalir ke lilitan
jangkar. Dimana permukaan sikat ditempelkan ke permukaan segmen
komutator untuk menyalurkan arus listrik. Sikat harus lebih lunak dari
komutator supaya gesekan antara komutator-komutator dan sikat tidak
[image:38.595.158.541.382.525.2]4. Kumparan Medan
Kumparan Medan adalah susunan konduktor yang dibelitkan pada inti
kutub. Rangkain medan berfungsi untuk menghasilkan fluksi utama
dibentuk dari kumparan pada setiap kutub.
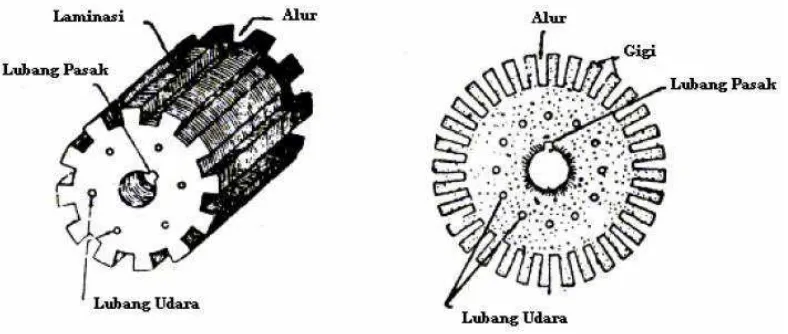
5. Inti Jangkar
Inti Jankar yang biasa digunakan pada motor arus searah berbentuk silinder
yang diberi alur-alur pada permukaannya sebagai tempat melilitkan
kumparan-kumparan penghasil GGL induksi. Inti jangkar terbuat dari bahan
ferromagnetik, dengan maksud agar komponen-komponen (lilitan jangkar)
terletak dalam daerah yang induksi magnetnya besar, supaya GGL induksi
dapat bertambah besar. Bahan yang digunakan untuk jangkar sejenis
campuran baja silikon.
Gambar 2.2 (e) Inti Jangkar yang Berlapis-lapis
6. Kumparan Jangkar
Kumparan Jangkar pada motor arus searah berfungsi untuk tempat
timbulnya torsi. Dimana fluks yang dibangkitkan oleh kumparan jangkar
akan dipotong konduktor jangkar. Pada motor DC penguatan kompon
[image:39.595.155.549.418.585.2]sedangkan pada motor DC pengutan kompon pendek kumparan medan
serinya diparelelkan terhadap kumparan jangkar.
7. Komutator
Komutator berfungsi sebagai fasilitas penghubung arus dari konduktor
jangkar, sebagai penyearah mekanik, yang bersama-sama sikat membuat
suatu kerjasama yang disebut komutasi. Komutator digunakan dalam
jumlah yang besar sehingga dapat menyearahkan dengan baik dan
berbentuk lempengan-lempengan (segmen komutator) dan terdapat bahan
isolasi.
Gambar 2.2 (f) Komutator
[image:40.595.153.550.350.472.2]2.3 Prinsip Kerja Motor Arus Searah
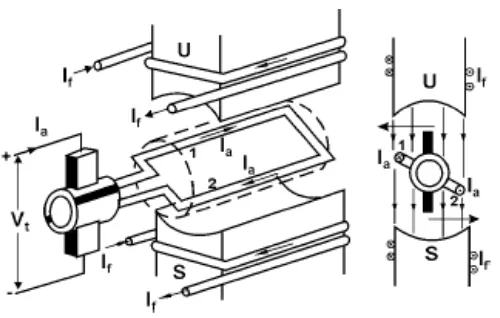
[image:40.595.189.439.556.715.2]Motor DC bekerja berdasarkan prinsip interaksi antara dua fluksi magnetic.
Ketika kumparan medan dan kumparan jangkar dihubungkan dengan sumber
tegangan DC seperti gambar 2.3, maka pada kumparan medan mengalir arus medan
(If), sehingga menghasilkan fluksi magnet yang arahnya dari kutub utara menuju
kutub selatan. Sedangkan pada kumparan jangkar mengalir arus jangkar (Ia),
sehingga pada konduktor kumparan jangkar timbul fluksi magnet yang melingkar.
Fluksi jangkar ini akan memotong fluksi dari kumparan medan sehingga
menyebabkan perubahan kerapatan fluksi dari medan utama. Sesuai hukum
Lorentz, interaksi antara kedua fluksi magnet ini akan menimbulkan suatu gaya
mekanik pada konduktor jangkar yang disebut gaya Lorentz. Besar gaya ini sesuai
dengan persamaan 1 berikut ini [5] :
F = B .i .l (2.1)
Dimana :
F= gaya yang bekerja pada konduktor (N)
B = kerapatan fluks magnetik (Wb/m2)
i = arus yang mengalir pada konduktor (A)
l = panjang konduktor (m)
Arah gaya ini dapat ditentukan dengan kaidah tangan kiri Flemming. Kaidah
tangan kiri menyatakan, jika jari telunjuk menyatakan arah dari vektor kerapatan
fluks B dan jari tengah menyatakan arah dari vektor arus I, maka ibu jari akan
menyatakan arah gaya F yang bekerja pada konduktor tersebut.
Gaya yang timbul pada konduktor jangkar tersebut akan menghasilkan
momen putar atau torsi. Torsi yang dihasilkan motor dapat ditentukan dengan
Ta = F .r (2.2)
Dimana : Ta = torsi jangkar (N-m)
r = jari-jari motor (m)
Bila torsi yang dihasilkan motor lebih besar dari pada torsi beban maka motor akan
berputar.
2.4 Reaksi Jangkar
Reaksi jangkar merupakan medan magnet yang disebabkan oleh mengalirnya
arus pada jangkar, dimana jangkar tersebut berada di dalam mangnet. Reaksi
jangkar mengakibatkan terjadinya 2 hal yaitu :
2. Demagnetisasi atau penurunan kerapatan fluksi medan utama.
3. Magnetisasi silang.
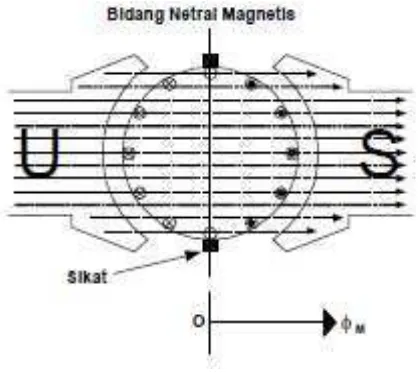
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak
dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal
untuk kutub utama dari motor arus searah dua kutub berasal dari kutub utara menuju
kutub selatan seperti terlihat pada Gambar 2.2 berikut ini :
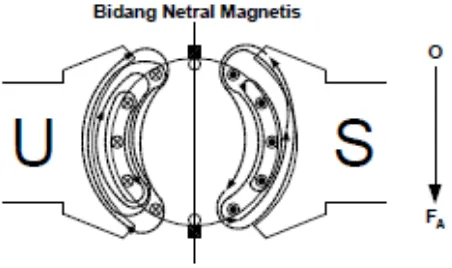
[image:42.595.228.437.528.715.2]Dari Gambar 2.4 (a) dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis
Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefenisikan sebagai bidang di dalam motor
dimana konduktor bergerak sejajar dengan garis gaya magnet, sehingga gaya gerak
listrik industry pada bidang tersebut adalah nol. Seperti yang terlihat dari Gambar
2.4 (a) sikat selalu ditempatkan disepanjang bidang netral magnetis. Oleh karena
itu, bidang netral magnetis disebut juga sebagai sumbu komutasi karena pembalikan
arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah
dari fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral
matgnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri arus listrik sementara
kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul ggm
atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada Gambar 2.4 (b)
berikut ini :
Gambar 2.4 (b) Fluksi yang Dihasilkan oleh Kumparan Jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar
[image:43.595.220.446.507.641.2]diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis. Pada
prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor
medan sama-sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari
menggabungkan kedua fluksi tersebut. Oleh karenanya distribusi fluksi medan
utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan
saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan
pengaruh fluksi jangkar yang dapat dilihat pada Gambar 2.4 (c) berikut ini :
Gambar 2.4 (c) Hasil Kombinasi antara Fluksi Medan dan Fluksi Jangkar
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang
fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat
fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan
menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah satu
kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama.
Efek dari intensitas medan magnet atau lintasan fluksi pada jangar yang memotong
lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi silang
[image:44.595.220.454.280.460.2]Magnetisasi silang ini juga menyebabkan pergeseran bidang netral. Pada
Gambar 2.4 (c) terlihat bahwa vektor OF merupakan resultan vektor OFA dan OFM,
serta posisi bidang netral magnetis yang baru, dimana selalu tegak lurus terhadap
vektor OF. Bidang netral magnetis motor yang baru bergeser sejauh β karena posisi
bidang netral magnetis ini selalu tagak lurus terhadap vektor OF. Dengan
pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran
bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator
dekat sikat.
Kebanyakan mesin listrik bekerja pada kerapatan fluksi yang dekat dengan
titik jenuhnya sehingga dapat menimbulkan kejenuhan magnetik. Apabila
kejenuhan magnetik terjadi, maka efek penguatan fluksi resultan lebih kecil bila
dibandingkan dengan efek pelemahan fluksi resultan atau dengan kata lain
pertambahan kerapatan fluksi resultan pada salah satu bagian kutub lebih sedikit
bila dibandingkan dengan pengurangan kerapatan fluksi pada bagian yang lainnya.
Sehingga fluksi resultan akan berkurang dari harga tanpa bebannya. Hal inilah yang
disebut sebagai efek demagnetisasi reaksi jangkar dan perlu dicatat bahwa
demagnetisasi timbul hanya karena adanya saturasi magnetik.
Akibat pelemahan fluks ini, efek yang ditimbulkan pada motor arus searah
menjadi lebih serius, dimana pelemahan fluks akan menyebabkan motor arus searah
khususnya motor arus searah paralel akan demikian cepatnya hingga tak terkendali.
Oleh sebab itu, perlu dilakukannya hal-hal yang dapat mencegah atau
mengurangi terjadinya hal diatas. Ada tiga cara yang dapat dilakukan, yaitu:
1. Pergeseran sikat (Brush Shifting)
3. Belitan kompensasi (Compensating Windings)
2.5 Jenis-jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis
penguatannya yaitu hubungan rangkaian kumparan medan magnet dengan
kumparan jangkar. Sehingga motor arus searah dibedakan menjadi :
1. Motor arus searah penguatan bebas
2. Motor arus searah penguatan sendiri
2.5.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber
tegangan penguatannya berasal dari luar motor. Dimana kumparan medan disuplai
dari sumber tegangan DC tersendiri.
a. Rangkaian Ekivalen
Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada
Gambar 2.5 (a) berikut ini :
Ra
Ia
Ea Rf Vf
If
Vt
+
-Gambar 2.5 (a) Rangkaian Ekivalen Motor DC Penguatan Bebas
[image:46.595.184.481.536.687.2]V = Ea+ IaRa (2.3)
V = I + R (2.4)
Dimana: V = tegangan terminal jangkar motor arus searah Volt
Ia = arus jangkar Ampere
Ra= tahanan jangkar Ohm
I = arus medan penguatan bebas Ampere
R = tahanan medan penguatan bebas Ohm
V = tegangan terminal medan penguatan bebas Volt
Ea = gaya gerak listrik motor arus searah Volt
b. Karakteristik
Karakteristik motor arus searah dapat ditunjukkan dengan penambahan
beban sehingga Tb > Tindakan menyebabkan perlambatan putaran motor (ω) dari
hubungan persamaan EB = k.Φ.ω.
Menurunnya nilai ω akan berakibat jatuhnya tegangan EB, begitu juga dari
hubungan persamaan U = EB + IA.RA, maka IA bertambah. Dengan naiknya IA, maka
kopel induksinya pun akan meningkat (persamaan Tind = k. Φ.IA) untuk
mengimbangi kopel beban dan akhirnya besar kopel induksinya sama dengan kopel
2.5.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri terbagi atas tiga, yaitu: motor arus
searah penguatan shunt, motor arus searah penguatan seri dan motor arus searah
penguatan kompon.
1. Motor Arus Searah Penguatan Shunt
a. Rangkaian Ekivalen
R
aE
a+
-I
LV
tR
shI
shI
aGambar 2.5(b) Rangkaian Ekivalen Motor DC Penguatan Shunt
Persamaan umum motor arus searah penguatan shunt
Vt=Ea+IaRa
Vsh=Vt=Ish . Rsh (2.5)
IL=Ia+Ish (2.6)
Dimana : Ish=arus kumparan medan shunt (Ampere)
Vsh=tegangan terminal medan shunt motor arus searah Volt
Rsh=tahanan medan shunt (Ohm)
[image:48.595.122.531.288.471.2]b. Karakteristik
Pada dasarnya karakteristik motor arus searah jenis ini memiliki
karakteristik yang sama dengan karakteristik motor arus searah berpenguatan
terpisah apabila diberikan pasokan tegangan yang cukup stabil.
2. Motor Arus Searah Penguatan Seri
a. Rangkaian Ekivalen
R
aE
a+
-I
LV
tI
aR
sGambar 2.5(c) Rangkaian Ekivalen Motor DC Penguatan Seri
Persamaan umum motor arus searah penguatan seri
Vt= Ea+ Ia Ra+ Rs (2.7)
Ia= [VRt- Ea
a- Rs] (2.8)
Ia= IL= If
Dimana : Ia=arus kumparan medan seri (Ampere)
[image:49.595.121.519.311.534.2]Ra=tahanan jangkar (Ohm)
Ea=gaya gerak listrik motor arus searah Volt
Vt=tegangan terminal jangkar motor arus searah Volt
b. Karakteristik
Ketika beban meningkat, IA bertambah dan fluks meningkat. Maka Tind pun
akan meningkat secara kuadratis terhadap arus jangkar IA. Jadi, pada saat
kondisi kejenuhan tercapai, fluks tidak lagi akan tergantung pada IA, maka Tind
sebanding dengan IA dan kurvanya akan berbentuk garis lurus.
Adapun hubungan antara kopel dan kecepatannya:
IA = √Tind
k
Ketika kopel induksi menuju nol, maka kecepatan putar motor akan menuju
ke harga tak berhingga, hal ini merupakan salah satu kerugian motor arus searah
berpenguatan seri.
Namun dalam praktiknya, kopel induksi tersebut tidak dapat menjadi nol
karena adanya rugi-rugi mekanis, inti, dan rugi besi yang harus diatasi.
Bagaimanapun, jika tidak ada beban yang dihubungkan ke motor arus searah
jenis ini, maka putaran motor menjadi sangat cepat dan cukup membahayakan.
juga dalam menghubungkan dengan beban jangan menggunakan mekanisme
penggerak yang mudah putus seperti ban-kopel (V-belt).
3. Motor Arus Searah Penguatan Kompon
Motor arus searah penguatan kompon terbagi atas dua, yaitu :
3.1Motor Arus Searah Penguatan Kompon Pendek
Ra Ea
+
-IL
Vt
Ia
Rs
Rsh
Ish
Gambar 2.5 (d) Rangkaian Ekivalen Motor DC Penguatan Kompon Pendek
Persamaan umum motor arus searah penguatan kompon pendek
IL=Ia+Ish
Vt=Ea+IaRa+ILRs (2.9)
Pin=VtIL (2.10)
Dimana : ILRs=tegangan jatuh pada kumparan seri
IaRa=tegangan jatuh pada kumparan jangkar
Ea=gaya gerak listrik motor arus searah Volt
[image:51.595.123.524.247.437.2]3.2Motor Arus Searah Penguatan Kompon Panjang
a. Rangkaian Ekivalen
Ra Ea
+
-IL
Vt
Rs
Rsh
Ish Ia
Gambar 2.5 (e) Rangkaian Ekivalen Motor DC Penguatan Kompon Panjang
Persamaan umum motor arus searah penguatan kompon panjang
IL=Ia+Ish
Vt=Ea+Ia(Ra+Rs) (2.11)
Pin=VtIL
Vt=Vsh
Dimana : IaRs=tegangan jatuh pada kumparan seri
IaRa=tegangan jatuh pada kumparan jangkar
b. Karakteristik
Motor DC penguatan kompon memiliki dua kumparan medan yakni
kumparan medan shunt dan kumparan medan seri. Berikut ini tiga
karakteristik dari sebuah motor DC penguatan kompon panjang:
[image:52.595.121.523.152.338.2]Dengan penambahan arus jangkar (Ia) sehingga ( ) bertambah dan torsi
(T) juga besar.
T=K.∅m.Ia dimana ∅m=∅sh+∅s
T=K(∅sh+∅s)Ia (2.12)
Jika fluksi medan shunt lebih besar dibandingkan medan seri maka
bentuk karakteristik torsi dan arus seperti kurva 1. Sedangkan jika fluksi
medan seri lebih besar dibandingkan dengan medan shunt maka bentuk
karakteristik torsi dan arus seperti kurva 2. Gambar karakteristik untuk torsi
dan arus dapat dilihat seperti gambar berikut ini:
Gambar 2.5 (f) Karakteristik Torsi dan Arus Jangkar
2. Karakteristik Putaran (n=n(Ia))V
Untuk motor kompon panjang:
Vt=Ea+Ia(Ra+Rs) (2.13)
[image:53.595.232.413.381.544.2]Ea=C(∅sh+∅s)n (2.15)
Jadi :
n
=∅ ℎ+∅ [Vt − Ia Ra + Rs ] (2.16)
Dengan pertambahan arus jangkar (Ia), fluks (∅) juga akan bertambah
dan [Vt-Ia(Ra+Rs)] berkurang. Dengan pertambahan arus jangkar maka
kecepatan jatuh pada motor kompon lebih cepat dibandingkan dengan motor
arus shunt. Karakteristik dari kecepatan dengan arus jangkar dapat
digambarkan sebagai berikut:
Gambar 2.5(g) Karakteristik Kecepatan dan Arus Jangkar
3. Karakteristik Mekanis (T=T(n))V
Ini merupkan kurva antara kecepatan (n) dan torsi (T) dari motor DC.
Jika torsi T=k.∅.Ia bertambah, maka nilai (Ia) bertambah, sedangkan fluks
(∅) tetap. Dengan bertambahnya torsi (T) maka kecepatan (n) akan
menurun, maka kurva motor kompon ini sama dengan motor shunt. Untuk
[image:54.595.216.449.324.522.2]seperti kurva 1. Sedangkan untuk medan seri karakteristik kecepatan dan
torsi mendekati ke motor seri seperti kurva 2. Seperti gambar berikut:
Gambar 2.5(h) Karakteristik Kecepatan dan Torsi
2.6 Rugi-Rugi Motor Arus Searah
Motor DC menerima daya masukan berupa energi listrik dan menghasilkan
daya keluaran berupa energi mekanis. Akan tetapi, tidak seluruh daya masukan ke
motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang
selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada yang
dikonversikan menjadi panas dan ada yang diserap oleh mesin untuk mengatasi
gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi daya dalam
bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan kenaikan
temperatur motor yang dapat merusak isolasi dan mempercepat berkurangnya umur
ekonomis motor sehingga membatasi daya keluaran motor. Berikut proses
[image:55.595.211.455.152.365.2]Daya input
V IL Watt
Daya mekanis yang dibangkitkan di
dalam jangkar Ea Ia Watt
Daya output motor Tshω Watt
Rugi-rugi tembaga
Rugi-rugi besi dan mekanis
Energi Listrik Energi
mekanis
Gambar 2.6 (a) Diagram Aliran Daya pada Motor Arus Searah
Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran
motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam persamaan
sinyatakan dengan :
∑ Rugi-Rugi = Daya Masukan – Daya Keluaran
Akhirnya, rugi-rugi di dalam motor DC didefenisikan sebagai selisih daya
antara daya masukan yang diterima motor dengan daya keluaran yang dapat
dihasilkannya dimana selisih daya tersebut berubah menjadi bentuk energi yang
lain yang tidak dapat digunakan bahkan dapat merugikan bagi motor itu sendiri.
2.6.1 Rugi-Rugi Tembaga (Copper Loss)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam kumparan medan
dan kumpran jangkar motor. Karena kawat tembaga kedua kumparan tersebut
memiliki nilai resistansi Rf dan Ra, maka jika mengalir arus searah sebesar If dan Ia
akan menyebabkan kerugian daya yang dihitung dengan persamaan :
Pa=Ia2Ra (2.17)
[image:56.595.149.547.88.238.2]Dimana : Pa=rugi tembaga kumparan jangkar
Pf=rugi tembaga kumparan medan
Ia=arus jangkar
If=arus medan
Ra=resistansi jangkar
Rf=resistansi medan
2.6.2 Rugi-Rugi Inti (Core or Iron Losses)
Rugi-rugi ini terjadi di dalam jangkar motor DC yang disebabkan oleh
perputaran jangkar di dalam medan magnet kutub-kutubnya. Ada dua jenis
rugi-rugi inti yaitu :
1. Rugi Hysteresis
Rugi hysteresis terjadi di dalam jangkar mesin DC karena setiap bagian jangkar
dipengaruhi oleh pembalikan medan magnetic sebagaimana bagian tersebut lewat
di bawah kutub-kutub yang berurut.
Gambar 2.6(b) Perputaran Jangkar di dalam Motor Dua Kutub
Gambar 2.6(b) menunjukkan jangkar yang berputar di dalam motor dua kutub.
Dengan menganggap ab sebagai potongan kecil dari jangkar. Ketika potongan ab
[image:57.595.223.425.496.572.2]perputaran selanjutnya, dari potongan besi yang sama berada di bawah kutub S dan
garis-garis magnetik lewat dari b ke a sehingga sifat magnet di dalam besi dibalik.
Untuk dapat membalik molekul-molekul magnet secara terus menerus di dalam inti
jangkar, sejumlah daya diserap sehingga menyebabkan pemanasan pada inti
jangkar. Daya yang diserap dan berubah menjadi panas sebagai rugi-rugi di dalam
inti jangkar dan disebut sebagai rugi hysteresis. Untuk menentukan besarnya rugi
hysteresis di dalam inti jangkardigunakan persamaan Steinmentzyaitu :
Ph= Bmax1,6 f υ Watt (2.19)
Dimana : Ph=rugi hysteresis
Bmax=rapat fluks maksimum di dalam jangkar
f =frekuensi pembalikan magnetik
= 120n P dimana n dalam rpm dan P=jumlah kutub
υ=volume jangkar m3
=koefisien hysteresis Steinmentz
2. Rugi Arus Pusar
Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor
jangkar, ada juga tegangan yang diinduksikan di dalam init jangkar. Tegangan ini
menghasilkan arus yang bersikulasi di dalam inti jangkar seperti yang ditunjukkan
dalam Gambar 2.15. Ini disebut sebagai arus pusar (eddy current) dan daya yang
hilang karena alirannya disebut dengan rugi arus pusar.
Rugi arus pusar berlaku sebagai panas yang dapat menaikkan temperatur motor
dan menurunkan efisiensinya. Jika suatu inti besi padat digunakan sebagai inti
jangkar, resistansi terhadap arus pusar ini akan menjadi kecil karena lebarnya luas
menjadi besar. Besarnya nilai arus pusar dapat dikurangi dengan membuat
resistansi inti sebesar mungkin secara praktisnya.
(1) (2)
Gambar 2.6 (c1) Arus pusar di dalam jangkar yang padat (c2) Arus pusar
di dalam inti jangkar yang dilaminasi
2.6.3 Rugi-Rugi Mekanis (Mechanical Losses)
Rugi-rugi mekanis di dalam mekanis motor DC merupakan rugi-rugi yang
berhubungan dengan efek-efek mekanis di dalam motor DC yaitu gesekan dan
angin. Rugi-rugi gesekan adalah rugi-rugi yang disebabkan oleh pergesekan antara
permukaan bagian-bagian yang berputar dengan bagian-bagian yang diam dari
motor, diantaranya gesekan bearing atau bantalan peluru dengan rumah bearing
atau dengan as rotor. Juga gesekan antara permukaan sikat dengan komutator.
Karena adanya suatu nilai koefisien gesek antara permukaan bagian-bagian tersebut
walaupun kecil, diperlukan gaya untuk mengimbangi gaya lawan akibat koefisien
gesek tersebut jika ingin menggerakkan rotor motor DC tersebut.
Sedangkan rugi-rugi angin adalah rugi-rugi yang disebabkan oleh
pergesekan antara bagian-bagian motor yang berputar dengan udara di dalam rumah
(casing) motor. Baik itu pergesekan antara permukaan rotor dengan udara pada
[image:59.595.135.502.143.270.2]dipasangkan pada rotor di dalam motor. Rugi-rugi angin ini bervariasi tergantung
pada kecepatan rotasi motor tersebut.
2.6.4 Rugi-Rugi Sikat (Brush Losses)
Jika kumparan jangkar motor DC dialiri arus listrik DC maka sikat-sikatnya
juga akan dialiri arus yang sama. Karena sikat memiliki nilai resistansi sikat dan
juga tahanan kontak antara permukaan sikat dengan komutator maka terdapat rugi
jatuh tegangan pada sikat yang dinyatakan dengan Vbd. Jatuh tegangan sikat ini
menyebabkan timbulnya rugi-rugi daya sebesar :
Pbd=Vbd.Ia (2.20)
Dimana : Pbd=rugi daya akibat tegangan sikat
Ia=arus jangkar
Vbd=jatuh tegangan sikat
Besarnya nilai jatuh tegangan sikat-sikat pada motor DC hampir konstan
dalam rentang arus jangkar yang besar. Maka rugi-rugi sikat dapat dihitung dengan
persamaan:
Pbd=2 x Ia (2.21)
2.6.5 Rugi-Rugi Beban Stray (Stray Load Losses)
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan oleh arus pusar
di dalam tembaga dan rugi-rugi inti tambahan di dalam besi, yang timbul karena
pendistorsian fluks magnetik oleh arus beban (tidak termasuk yang disebabkan oleh
Rugi-rugi beban stray ini tidak dapat dikategorikan ke dalam tipe rugi-rugi
yang disebutkan di atas. Di dalam perhitungan rugi motor DC, besarnya
rugi-rugi beban stray dinyatakan sebesar ± 1% dari beban penuh.
Rugi-rugi di dalam motor DC di atas juga dapat dikelompokkan menjadi
dua yaitu :
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor DC yang nilainya selalu tetap,
tidak tergantung pada arus pembebanan. Rugi-rugi inti + mekanis disebut
dengan rugi-rugi rotasi. Yang termasuk ke dalam kelompok rugi-rugi konstan
adalah :
a. Rugi-rugi inti yaitu rugi-rugi hysteresis dan arus pusar
b. Rugi-rugi mekanis yaitu rugi-rugi gesek dan angin.
c. Rugi-rugi tembaga medan shunt.
2. Rugi-rugi variabel yaitu rugi-rugi di dalam motor DC yang nilainya bervarisasi
terhadap arus pembebanan. Yang termasuk ke dalam kelompok rugi-rugi ini
adalah:
a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra).
b. Rugi-rugi tembaga kumparan medan seri (Ia2Rs)
c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam motor DC adalah :
∑ Rugi-Rugi = Rugi Konstan + Rugi Variabel
2.7 Efisiensi Mesin Arus Searah
2.7.1 Efisiensi Generator
Gambar 2.7(a) Aliran Daya Generator DC [1]
Efisiensi dapat dibagi menjadi tiga, yaitu:
1. Efisiensi Mekanik
�� = = � � � � � � � � � � � � � � �
= ��
��
2. Efesisnsi Elektrik
�� = = � � � �
� � � � � � � � =��
3. Efisiensi Keseluruhan atau Komersial
�� = = � � � � � � � � � � �
2.7.2 Efisiensi Motor
Daya masukan yang diterima oleh motor DC berupa daya listrik sedangkan
daya keluaran berupa daya mekanik yaitu gerak rotor dan selisih antara daya
masukan dengan daya keluaran motor disebut rugi-rugi. Dengan demikian,
[image:62.595.158.546.90.238.2]Efisiensi =
� � %
Dimana: Pin = Daya masukan
Pout = Daya keluaran
Karena, Pout = Pin-∑ Rugi-rugi
Dan, Pin = Pout+ ∑ Rugi-rugi
Maka,efisiensi motor DC dapat ditunjukkan dalam bentuk sebagai berikut:
Efisiensi =Pi −∑r i−r i Pi
Efisiensi= P
P +∑r i−r i
Metode yang paling nyata dalam menentukan efisiensi motor DC adalah
membebaninya langsung dan mengukur daya masuk dan keluarnya. Namun,
metode ini harus memperhatikan tiga hal utama yaitu metode ini
membutuhkan pembebanan pada motor. Kedua, untuk motor-motor dengan
rating daya yang besar, beban-beban yang diperlukan tidak mungkin
diperoleh. Ketiga, bahan lebih mustahil untuk memberikan beban
sedemikian rupa, karena daya yang besar akan terbuang menjadikan metode
ini sangat mahal.
Metode yang paling umum untuk mendapatkan efisiensi motor DC adalah
menentukan rugi-ruginya dari pengukuran daya masukan dan daya
keluarannya pada saat berbeban. Metode ini memiliki keuntungan yang
Berikut ini adalah gambar aliran daya pada motor DC
Gambar 2.7(b) Aliran Daya Motor [1]
Efisiensi motor dapat dibagi tiga, yaitu:
1. Efisiensi Mekanik
�� = = � �� �
� � = ��
2. Efesiensi Elektrik
�� = = �
� �� �
3. Efesiensi Keseluruhan atau Komersial
�� = = �
� �
Terlihat pada gambar 2.7(b) bahwa A-B = rugi tembaga dan B-C = rugi besi
dan gesekan
2.8 Pengujian Motor Arus Searah
Suatu mesin arus searah perlu dilakukan pengujian guna menentukan
[image:64.595.152.550.115.242.2]diuji, sehingga kita bisa mengetahui kenerja dari mesin tersebut. Ada beberapa
metode pengujian yang dapat dilakukan pada mesin arus searah.
2.8.1 Uji Swinburne atau Uji Tanpa Beban
Uji ini hanya dapat dilakukan pada mesin arus searah yang memiliki fluks
konstan, yaitu motor arus searah paralel dan motor arus searah kompon.
Percobaan ini menggunakan rangkaian uji seperti pada gambar berikut:
Gambar 2.8(a) Rangkaian Uji Swinburne[2]
2.8.2 Uji Regeneratif atau Uji Hopkinson
Uji regeneratif dilakukan untuk mendapatkan efesiensi dari mesin arus
searah pararel (baik itu motor maupun generator) yang diuji. Pada metode
ini motor arus searah dan generator arus searah (diusahakan keduanya
memiliki parameter yang identik) dikopel secara mekanis. Keluaran
generator peda pengujian ini tidak dibuang percuma, melainkan
[image:65.595.173.480.268.473.2]2.8.3 Uji Medan
Metode uji medan dilakukan untuk menguji motor arus searah seri. Prinsip
pengujiannya adalah dengan mengkopel dua mesin arus searah, dimana
mesin yang satu bekerja sebagai motor dan mesin yang lain bekerja sebagai
generator. Keluaran dari generator dibuang ke tahanan R yang dipasang
pada rangkaian uji. Rugi-rugi inti dan gesekan kedua mesin dibuat sama
dengan cara menghubung seri kumparan medan generator dengan rangkaian
jangkar motor sehingga penguatannya sama maka rugi-rugi inti sama dan
memutar kedua mesin dengan kecepatan yang sama yang bertujuan untuk
[image:66.595.199.460.389.572.2]mendapatkan rugi-rugi gesekan yang sama pada kedua mesin. Berikut
gambar rangkaian uji medan:
Gambar 2.8(b) Rangkaian Uji Medan [1]
2.8.4 Uji Rem (Brake Test)
Motor arus searah diberi catu daya arus searah dengan tegangan nominal, kemudian
poros motor dibebani (dengan mengunakan puli) sampai amperemeter
2.8.5 Uji Perlambatan atau Retardation Test
Uji perlambatan (retardation test) ini diterapkan untuk motor arus searah, untuk
mencari rugi butanya. Pada metode perlambatan kita akan mendapatkan
rugi-rugi rotasi meliputi rugi-rugi-rugi-rugi besi dan mekanis (gesek dan angin) dari mesin yang
diuji. Selanjutnya dengan mengetahui rugi-rugi tembaga kumparan pada saat
berbeban, efisiensi dapat dihitung pada saat pembebanan tersebut. Anggap motor
dc kompon panjang bekerja pada saat tanpa beban, maka prinsipnya sebagai
berikut:
1. Jika suplai ke jangkar dilepas tetapi medan tetap dieksitasi normal, motor
tersebut akan melambat secara bertahap dan akhirnya berhenti. Energi
kinetik jangkar digunakan untuk mengatasi rugi-rugi mekanis (gesek dan
angin) dan rugi-rugi besi.
2. Jika suplai ke jangkar dan medan dilepas bersamaan, motor juga akan
melambat dan akhirnya berhenti. Pada kasus ini energi kinetik jangkar
digunakan hanya untuk mengatasi rugi-rugi mekanis (gesek dan angin) saja.
Ini diperkirakan karena tidak adanya fluks sehingga tidak ada rugi-rugi besi.
Dengan menjalankan pengujian pertama, kita akan mendapatkan nilai
rugi-rugi gesek, angin dan besi. Namun demikian, jika kita menjankan pengujian kedua,
maka dapat dipisahkan antara rugi-rugi mekanis dengan rugi-rugi besi. Besarnya
energi kinetik dari putaran jangkar atau rotor (rugi-rugi putaran) sebesar:
Ek= Jω² (2.22)
ω = kecepatan sudut, (rad/s) = �
n = putaran normal (rpm)
Maka pada metode retardasi, laju perubahan energi kinetik dianggap untuk
mengatasi rugi-rugi rotasi motor. Jika perubahan energi kinetik ini
disimbolkan dengan ∆�, maka:
∆ = � (2.23)
∆ = �� (2.24)
= J� � (2.25)
1. Menentukan dw/dt
Pada pengujian metode perlambatan digunakan rangkaian seperti gambar
berikut:
Gambar 2.8(c) Rangkaian Uji Perlambatan Arus Searah [1]
Seperti pada gambar 2.8(c) diatas sebuah Voltmeter V dihubungkan dengan
kumparan jangkar. Voltmeter digunakan sebagai indikator kecepatan
dengan peningkatan yang sesuai, karena E � N, dan N ��. Ketika catu daya
diputus, kecepatan putar jangkar menurun dan juga tegangan yang
[image:68.595.217.448.424.564.2]tegangan yang jatuh (menurun) pada lamanya waktu yang berbeda, sebuah
kurva digambarkan antara waktu dan kecepatan (didapat dari nilai
tegangannya).
Gambar 2.8(d) Kurva Hasil Uji Perlambatan Arus Searah
Dari gambar P yang dihubungkan ke kecepatan normal, sudut tegangan AB
digambar, kemudian:
= �
Dari persamaan (2.25), dimana � =2�N/60 (N dalam rpm), sehingga:
W = � [ � ] [ � ] (2.26)
W = [ �]²�. (2.27)
W = , �. (2.28)
W = Ek = , �. (2.29)
2. Menentukan Momen Inersia
Ada dua metode dalam menentukan momen inersia, yaitu: yang pertama
metode dengan menghitung momen inersia dan yang kedua metode dengan
mengeliminasi momen inersia.
[image:69.595.239.416.169.297.2]Pertama-tama kurva penurunan (retardasi) digambar dengan jangkar saja.
Kemudian roda gila dari momen inersia J1 dikunci pada poros dan kurva
penurunan digambar kembali. Waktu perlambatan akan lebih lama karena
adanya kombinasi peningkatan momen inersia. Untuk tiap kecepatan yang
diberikan, dN/dt1 dan dN/dt2 ditentukan seperti sebelumnya. Perlu diingat
bahwa rugi-rugi pada kedua kasus hampir sama, karena penambahan roda
gila tidak terlalu berpengaruh (diabaikan) terhadap rugi-rugi.
Dari persamaan (2.29) diatas, maka:
Pada kasus pertama, �� = [ �]²�.
Pada kasus kedua, �� = [ �]². � + � .
� + � . [ ] = �. [ ]
Atau
[ + ] = [ ]/[ ]
� = � � / /− /
� = � � −
� = � � − (2.30)
Karena nilai J1, t1 dan t2 (dari pengamatan pada percobaan), maka momen
inersia jangkar (J) dan rugi-rugi rotasinya (W=Ek) dapat ditentukan.
b. Metode Dengan Mengeliminasi Momen Inersia
Dalam metode ini, pertama-tama waktu diambil atau dicatat pada saat
terjadi perlambatan, katakanlah 5% dicatat pada kondisi hanya jangkar saja.
waktu dicatat lagi. Metode menggunakan kopel elektris diperlihatkan pada
gambar 2.8(c), saklar ganda S ketika memutus jangkar dari tegangan catu
dayanya, secara otomatis menghubungkannya dengan resistansi. Daya yang
ditarik oleh resistansi ini berlaku sebagai kopel perlambatan pada jangkar,
dengan begitu membuatnya menjadi lambat dengan cepat.
Rugi-rugi tambahan = Ia².(Ra+R) atau V.Ia
Dimana: Ia arus rata-rata melalui R, V tegangan rata-rata di R. Ambil Ek
sebagai daya, maka:
�� = [ �] �.
�′� + �� = [ �] �. Sehingga:
� +�′
� =
�� = �′�� −
�� = �′�� −
Dimana: dN/dt1= kisar perubahan kecepatan tanpa beban tambahan
[image:71.595.217.421.305.488.2]BAB I