STUDI PENENTUAN RUGI-RUGI MOTOR ARUS SEARAH
PENGUATAN KOMPON PENDEK DENGAN MENGGUNAKAN
METODE PERLAMBATAN (RETARDATION TEST)
( Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU )Oleh :
Nama Mahasiswa
: Kaban Jaya
NIM
: 070402026
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Puji dan syukur kepada Tuhan Yang Maha Esa, yang telah memberikan
rahmat dan karunianya kepada penulis sehingga dapat menyelesaikan Tugas Akhir
ini, yang merupakan persyaratan untuk menyelesaikan studi di Departemen Teknik
Elektro Fakultas Teknik USU. Dalam penulisan Tugas Akhir ini, penulis mengambil
judul :
” STUDI PENENTUAN RUGI-RUGI MOTOR ARUS SEARAH PENGUATAN KOMPON PENDEK DENGAN MENGGUNAKAN METODE
PERLAMBATAN (RETARDATION TEST)”
( Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU )
Penulis menyadari bahwa tulisan ini tidak akan selesai tanpa adanya bantuan
dan dukungan dari berbagai pihak.
Pada kesempatan ini saya ingin menyampaikan ucapan terima kasih yang
tulus dan sebesar-besarnya kepada:
1. Kedua orang tua penulis, J. siahaan dan S. Siregar serta abang dan kakak
penulis yang tidak pernah berhenti memberi dukungan, semangat dan doanya
kepada saya dengan segala pengorbanan dan kasih sayang yang tidak ternilai
besarnya.
2. Bapak Ir. Surya Tarmizi Kasim, M.Si selaku Ketua Departemen Teknik
Elektro Fakultas Teknik USU.
4. Bapak Ir. Eddy Warman, sebagai Dosen Pembimbing Tugas Akhir penulis
yang sangat besar bantuannya bagi penulis dalam menyelesaikan Tugas
Akhir ini.
5. Bapak Ir. Bonggas L Tobing, selaku Dosen Wali Penulis yang telah banyak
membimbing dan membantu selama masa kuliah sampai penyusunan Tugas
Akhir ini.
6. Bapak Ir. Satria Ginting sebagai Kepala Laboratorium Konversi Energi
Listrik Fakultas Teknik USU yang telah memberi izin riset di Laboratorium
Konversi Energi Listrik.
7. Kepada Ferry Bukit selaku asisten Konversi yang telah bersedia meluangkan
waktunya untuk saya dalam pengambilan data.
8. Penulis juga mengucapkan banyak terima kasih kepada teman saya Rumonda
Sitepu yang telah banyak membantu penulis dalam menyelesaikan tugas
akhir ini, dan juga ucapan terima kasih saya ucapkan kepada teman saya
fransisco yang baik hati dan teman-teman yang lain ramseis, harapan, roki,
haguaro, niko, kendri, yosua, setia, yoakim, mario, ramli, leo h, leo s, ivan
dan lain-lain yang tidak bisa saya sebutkan satu persatu.
9. Seluruh mahasiswa Teknik Elektro USU.
Penulis menyadari bahwa tulisan ini masih memiliki banyak kekurangan, oleh
karena itu saran dan kritik sangat diperlukan dalam mengembangkan isi dari Tugas
Akhir ini.
Semoga Tugas Akhir ini dapat bermanfaat bagi penulis pribadi dan juga
ABSTRAK
Kinerja suatu motor DC dikatakan baik jika efisiensi motor tersebut tinggi.
Untuk mendapatkan efisiensi yang tinggi maka suatu motor DC haruslah mempunyai
rugi-rugi yang kecil. Mengetahui.rugi-rugi suatu motor DC sangatlah penting. Ada
beberapa metode yang dapat digunakan untuk menghitung rugi-rugi motor DC. Salah
satu metode yang digunakan adalah metode Perlambatan (retardation test). Metode
Perlambatan digunakan untuk mencari rugi-rugi mekanis dan besi. Dalam tugas akhir
efisiensi terbaik motor DC kompon pendek didapat pada saat motor dalam kondisi
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iii
DAFTAR ISI ... iv BAB I PENDAHULUAN I.1 Latar Belakang ... 1
I.2 Tujuan dan Manfaat Penulisan... 2
I.3 Batasan Masalah ... 2
I.4 Metode Penulisan ... 3
I.5 Sistematika Penulisan ... 3
BAB II MOTOR ARUS SEARAH II.1 Umum ... 5
II.2 Konstruksi Motor Arus Searah ... 7
II.3 Prinsip Kerja Motor Arus Searah ... 12
II.4 Reaksi Jangkar ... 16
II.4.1 Pergeseran Sikat (brush shifting) ... 21
II.4.2 Penambahan Kutup Bantu (interpole) ... 22
II.4.3 Belitan Kompensasi (Compensating Windings) ... 23
II.5 GGL Lawan Pada Motor Arus Searah ... 23
II.6 Jenis-Jenis Motor Arus Searah ... 24
II.6.2.1 Motor Arus Searah Penguatan Shunt ... 26
II.6.2.2 Motor Arus Searah Penguatan Seri ... 27
II.6.2.3 Motor Arus Searah Penguatan Kompond... 28
II.7 Karakteristik Motor Arus Searah ... 29
BAB III UJI RETARDATION III.1 Umum ... 33
III.2 Menentukan dw/dt ... 34
III.3 Menentukan Momen Inersia ... 36
III.3.1 Metode Dengan Menghitung Momen Inersia ... 36
III.3.2 Metode Dengan Mengeliminasi Momen Inersia... 37
BAB IV MENENTUKAN RUGI-RUGI MOTOR ARUS SEARAH KOMPONDNPENDEK DENGAN MENGGUNAKAN METODE RETARDATION IV.1 Metode Retardasi Dalam Menentukan Rugi-Rugi dan Efisiensi MotorDC kompond Pendek ... 49
IV.1.1 Prinsip Dasar Metode Retardasi ... 49
IV.1.2 Metode Pengukuran Momen Inersia Pada Jangkar Motor DC Kompond Pendek ... 41
IV.1.3 Spesifikasi Motor DC Kompond Pendek ... 42
IV.1.4 Peralatan Pengujian ... 43
IV.1.5 Prosedur Pengujian ... 44
BAB V KESIMPULAN DAN SARAN
V.I Kesimpulan ... 64 V.2 Saran ... 64
ABSTRAK
Kinerja suatu motor DC dikatakan baik jika efisiensi motor tersebut tinggi.
Untuk mendapatkan efisiensi yang tinggi maka suatu motor DC haruslah mempunyai
rugi-rugi yang kecil. Mengetahui.rugi-rugi suatu motor DC sangatlah penting. Ada
beberapa metode yang dapat digunakan untuk menghitung rugi-rugi motor DC. Salah
satu metode yang digunakan adalah metode Perlambatan (retardation test). Metode
Perlambatan digunakan untuk mencari rugi-rugi mekanis dan besi. Dalam tugas akhir
efisiensi terbaik motor DC kompon pendek didapat pada saat motor dalam kondisi
BAB I
PENDAHULUAN
I.1 Latar Belakang
Pada saat motor DC menerima daya masukan berupa energi listrik dan
menghasilkan daya keluaran berupa energi mekanis, tidak seluruh daya masukan ke
motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang
selama proses pengkonversian energi tersebut. Energi yang hilang tersebut
dinamakan rugi-rugi yang pada motor dc kompon pendek terdiri dari rugi besi,
tembaga dan rugi mekanis. Mengetahui rugi-rugi suatu motor dc sangatlah penting
karena kinerja suatu motor dc dikatakan baik jika motor tersebut mempunyai
rugi-rugi yang kecil. Untuk mengetahui rugi-rugi-rugi-rugi motor dc ada berbagai cara yang dapat
dilakukan. Salah satu cara yaitu mengunakan metode Perlambatan (retardation teat).
Pada metode retardation test, rugi-rugi yang dapat dicari yaitu rugi besi dan
rugi mekanis, metode retardation dilakukan dengan cara memutar motor dc dengan
kecepatan yang lebih tinggi dari kecepatan normalnya, setelah itu catu daya diputus
sambil tetap menjaga penguatan kumparan medannya. Dalam tugas akhir ini akan
dilakukan studi mengenai pengujian rugi-rugi motor dc kompon pendek dengan
I.2 Tujuan dan Manfaat Penulisan
Adapun tujuan penulisan tugas akhir ini adalah untuk mengetahui besarnya rugi-rugi suatu motor DC kompon pendek dan mengetahui besarnya nilai momen
inersia motor tersebut dengan menggunakan metode retardation test
Manfaat penelitian ini adalah mendapatkan pengertian dan penjelasan
mengenai metode retardation test dan memberikan kesempatan bagi mahasiswa lain
untuk mempelajari lebih lanjut.
I.3 Batasan Masalah
Agar tujuan penulisan tugas akhir ini sesuai dengan yang diharapkan serta
terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis
membatasi permasalahan yang akan dibahas sebagai berikut :
1. Motor yang digunakan adalah motor DC kompon pendek
2. Tidak membahas gangguan yang terjadi pada motor DC kompon
pendek
3. Motor DC kompon pendek beroperasi sendiri
4. Beban yang digunakan adalah beban Resistif
5. Pengatur tegangan yang digunakan dalam percobaan adalah pengatur
tegangan bolak – balik (PTAC) yang akan disearahkan dengan
dioda 3 phasa gelombang penuh sehingga menjadi tegangan DC
sesuai yang dibutuhkan Motor DC Kompond Pendek.
7. Analisis perhitungan berdasarkan peralatan yang tersedia di
Laboratorium Konversi Energi Listrik
I.4 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa
metode studi diantaranya :
1. Studi literatur yaitu dengan membaca teori-teori yang berkaitan
dengan topik tugas akhir ini dari buku-buku referensi baik yang
dimiliki oleh penulis atau di perpustakaan dan juga dari artikel-artikel,
jurnal, internet dan lain-lain.
2. Studi lapangan yaitu dengan melaksanakan percobaan di Laboratorium
Konversi Energi Listrik FT USU.
3. Studi bimbingan yaitu dengan melakukan diskusi tentang topik tugas
akhir ini dengan dosen pembimbing yang telah ditunjuk oleh pihak
departemen Teknik Elektro USU, dengan dosen-dosen bidang
Konversi Energi Listrik, asisten Laboratorium Konversi Energi Listrik
dan teman-teman sesama mahasiswa.
I.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang
masalah, tujuan dan manfaat penulisan, batasan masalah, metode
dan sistematika penulisan.
BAB II MOTOR ARUS SEARAH
Bab ini membahas tentang motor DC, konstruksi, jenis motor DC,
Reaksi Jangkar, GGL Lawan, prinsip kerja, Karakteristik Motor
Arus Searah
BAB III PENGUJIAN RETARDATION
Pada bab ini menjelaskan bagaimana cara dan peralatan yang
dibutuhkan untuk menggunakan metode retardation
BAB IV MENENTUKAN RUGI-RUGI MOTOR ARUS SEARAH DENGAN MENGGUNAKAN METODE RETARDATION .
Bab ini menghitung rugi-rugi motor arus searah dengan
menggunakan metode retardation.
BAB V KESIMPULAN DAN SARAN
Bab ini membahas tentang hal-hal yang dianggap penting didalam
tulisan yang dirangkum sebagai kesimpulan dan saran dari hasil
BAB II
MOTOR ARUS SEARAH
II.1 Umum
Motor arus searah (motor DC) adalah mesin yang merubah energi listrik arus
searah menjadi energi mekanis yang berupa putaran. Hampir pada semua prinsip
pengoperasiannya, motor arus searah sangat identik dengan generator arus searah.
Kenyataannya mesin yang bekerja baik sebagai generator DC akan bekerja baik pula
sebagai motor DC. Oleh sebab itu sebuah mesin arus searah dapat digunakan baik
sebagai motor arus searah maupun generator arus searah.
Motor listrik merupakan perangkat elektromagnetis yang mengubah energy
listrik menjadi energy mekanik. Energy mekanik ini digunakan untuk, misalnya
memutar impeller pompa, fan atau blower, menggerakkan kompresor, mengangkat
bahan , dan lain lain. Motor listrik digunakan juga dirumah (mixer, bor listrik, fan
angin) dan industry. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab
diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di
industri.
Motor arus searah memerlukan suplai tegangan yang searah pada kumparan
energi medan untuk diubah menjadi mekanik. Kumparan medan pada motor arus
searah disebut stator (bagian yang tidak berputar), dan kumparan jangkar disebut
setiap setengah putaran, sehingga merupakan tegangan bolak balik. Prinsip kerja dari
generator arus searah adalah membalik phasa tegangan dari gelombang yang
mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang
berbalik arah dengan kumparan jangkaryang berputar dalam medan magnet. Bentuk
motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas
diantara kutub-kutub magnet permanen.
Gambar 2.1 Motor DC Sederhana
Catu tegangan DC dari baterai menuju kelilitan melalui sikat yang menyentuh
komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu
lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan
II.2 Konstruksi Motor Arus Searah
Gambar di bawah ini merupakan konstruksi motor arus searah.
Gambar 2.2 (a) Konstruksi Motor Arus Searah
Gambar 2.2 (b) Konstruksi Motor Arus Searah Bagian Stator
Keterangan dari gambar di atas adalah:
1. Badan motar (Rangka)
Rangka (frame atau yoke) mesin arus searah seperti juga mesin-mesin listrik
lainnya secara umum memiliki dua fungsi, yaitu:
i. Merupakan sarana pendukung mekanik untuk mesin secara
keseluruhan.
ii. Untuk membawa fluks magnetic yang dihasilkan oleh kutub-kutub
magnet.
Untuk mesin kecil, dipertimbangan harga lebih dominan dari pada beratnya,
biasanya rangkanya terbuat dari besi tuang (cast iron), tetapi untuk mesin-mesin besar
umumnya terbuat dari baja tuang (cast steel) atau lembaran baja (rolled steel). Rangka
ini pada bagian dalam dilaminasi untuk mengurangi rugi-rugi inti, selain itu rangka
ini juga harus memiliki permeabilitas yang tinggi, disamping kuat secara mekanik.
Biasanya pada motor terdapat papan nama (name plate) yang bertuliskan
spesifikasi umum atau data-data teknik dari mesin, juga terdapat kotak ujung yang
merupakan tempat-tempat ujung-ujung belitan penguat medan dan lilitan jangkar.
2. Kutub
Medan penguat atau magnet medan terdiri atas inti kutub dan sepatu kutub
Gambar 2.3 Konstruksi Kutub dan Penempatannya Adapun fungsi dari sepatu kutub adalah:
• Menyebarkan fluks pada celah udara dan juga karena merupakan bidang lebar
maka akan mengurangi reluktansi jalur magnet.
• Sebagai pendukung secara mekanik untuk kumparan penguat atau kumparan
medan.
Inti kutub terbuat lembaran-lembaran besi tuang atau baja tuang. Sepatu kutub
dilaminasi dan dibuat atau dikeling (rivet) ke rangka mesin. Sebagaimana diketahui
bahwa fluks magnet yang terdapat pada motor arus searah dihasilkan oleh
kutub-kutub magnet buatan dengan prinsip elektromagnetik. Kumparan penguat atau
kumparan kutub terbuat dari kawat tembaga (berbentuk bulat atau strip/persegi) yang
dililitkan sedemikian rupa dengan ukuran tertentu. Kumparan penguat medan
berfungsi untuk mengalirkan arus listrik untuk terjadinya proses elektromagnetik.
3. Inti Jangkar
Inti jangkar yang umum digunakan dalam motor arus searah adalah berbentuk
kumparan-ferromagnetik, dengan meksud agar komponen-komponen (lilitan jangkar) terletak
dalam daerah yang induksi magnetnya besar, supaya ggl induksi dapat bertambah
besar. Seperti halnya inti kutub magnet maka jangkar dibuat dari bahan berlapis- lapis
tipis untuk mengurangi panas yang terbentuk karena adanya arus linier ditunjukkan
pada gambar 2.4
Gambar 2.4 Inti Jangkar Yang Berlapis-Lapis
Bahan yang digunakan untuk jangkar ini sejenis campuran baja silikon. Pada
umumnya alur tidak hanya diisi satu kumparan yang tersusun secara berlapis.
4. Kumparan Jangkar
Kumparan jangkar pada motor arus searah berfungsi tempat terbentuknya ggl
induksi.
5. Kumparan Medan
Fungsi kumparan medan ini adalah untuk membangkitkan fluksi yang akan
6. komutator
Fungsi komutator untuk fasilitas penghubung arus dari konduktor jangkar,
sebagai penyearah mekanik, yang bersama-sama dengan sikat membuat sesuatu
kerjasama yang disebut komutasi. Agar menghasilkan penyearah yang lebih baik,
maka komutator yang digunakan hendaknya dalam jumlah yang besar. Dalam hal ini
setiap bahan (segmen) komutator tidak lagi merupakan bentuk separoh cincin, tetapi
sudah berbentuk lempengan-lempengan (segmen komutator) terdapat bahan isolasi
(gambar 2.5)
Gambar 2.5 Komutator 7. Sikat-Sikat
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus ke kumparan
jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk
menyalurkan arus listrik. Besarnya tekanan pegas dapat diatur sesuai dengan
keinginan.
Disamping itu sikat memegang peranan penting untuk terjadinya komutasi.
rugi-rugi listrik. Agar gesekan antar komutator-komutator dan sikat tidak
mengakibatkan arusnya komutator. Maka sikat harus lebih lunak dari pada komutator.
II.3 Prinsip Kerja Motor Arus Searah
Sebuah konduktor yang dialiri arus mempunyai medan magnet
disekelilingnya. Pada saat konduktor yang dialiri arus listrik yang ditempatkan pada
suatu medan magnet maka konduktor akan mengalami gaya mekanik, separti
diperlihatkan pada gambar:
(a) (b) (c)
Gambar 2.6 Pengaruh Penempatan Konduktor Berarus Dalam Medan Magnet
Pada gambar 2.6.(a) menggambarkan sebuah konduktor yang dialiri arus
listrik menghasilkan medan magnet disekelilingnya. Arah medan magnet yang
dihasilkan oleh konduktor dapat diperoleh dengan menggunakan kaidah tangan
kanan.
Kuat medan tergantung pada besarnya arus yang mengalir pada konduktor.
kutub-kutub magnet utara dan selatan. Arah medan magnet adalah dari kutub utara
menuju kutub selatan.
Pada saat konduktor dengan arah arus menjauhi pembaca ditempatkan
didalam medan magnet seragam, maka medan gabungannya akan seperti yang
ditunjukkan pada gambar 2.6.(c) daerah di atas konduktor, medan yang ditimbulkan
konduktor adalah dari kiri ke kanan, atau pada arah yang sama dengan medan utama.
Hasilnya adalah memperkuat medan atau menambah kerapatan fluksi di atas
konduktor dan melemahkan medan atau mengurangi kerapatan fluksi di bawah
konduktor.
Dalam keadaan ini, fluksi di daerah di atas konduktor yang kerapatannya
bertambah akan mengusahakan gaya ke bawah kepada konduktor, untuk mengurangi
kerapatannya. Hal ini menyebabkan konduktor mengalami gaya berupa dorongan ke
arah bawah. Begitu juga halnya jika arah arus dalam konduktor dibalik. Kerapatan
fluksi yang berada di bawah konduktor akan bertambah sedangkan kerapatan fluksi di
atas konduktor berkurang. Sehingga konduktor akan mendapatkan gaya tolak kea rah
atas.
Konduktor yang mengalirkan arus dalam medan magnet cenderung bergerak
tegak lurus terhadap medan.
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar
Gambar 2.7 Prinsip Perputaran Motor DC
Pada saat kumparan medan dihubungkan dengan sumber tegangan, mengalir
arus medan pada kumparan medan karena rangkaian tertutup sehingga
menghasilkan fluksi magnet yang arahnya dari kutup utara menuju kutup selatan.
Selanjutnya ketika kumparan jangkar dihubungkan kesumber tegangan, pada
kumparan jangkar mengalir arus jangkar . Arus yang mengalir pada
konduktor-konduktor kumparan jangkar menimbulkan fluksi magnet yang melingkar. Fluksi
jangkar ini memotong fluksi dari kutub medan, sehingga menyebabkan perubahan
kerapatan fluksi dari medan utama. Hal ini menyebabkan jangkar mengalami gaya
sehingga menimbulkan torsi.
Gaya yang dihasilkan pada setiap konduktor dari sebuah jangkar, merupakan
akibat aksi gabungan medan utama dan medan disekeliling konduktor. Gaya yang
dihasilkan berbanding lurus dengan besar fluksi medan utama dan kuat medan di
sekeliling konduktor. medan di sekeliling masing-masing konduktor jangkar
tergantung pada besarnya arus jangkar yang mengalir pada konduktor tersebut. Arah
Gambar 2.8. Aturan Tangan Kiri Untuk Prinsip Kerja Motor dc.
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B) maka
besar gaya yang dihasilkan oleh arus yang mengalir pada konduktor jangkar yang
ditempatkan dalam suatu medan magnet adalah :
F = B . I . l newton... (2.1)
Dimana :
F = Gaya lorenz (Newton)
I = Arus yang mengalir pada konduktor jangkar (Ampere)
B = Kerapatan fluksi (Weber/m2)
l = Panjang konduktor jangkar (m)
Sedangkan torsi yang dihasilkan motor dapat ditentukan dengan:
T = F.r ... (2.2)
Bila torsi yang dihasilkan motor lebih besar dari pada torsi beban maka motor
akan berputar. Besarnya torsi beban dapat dituliskan dengan:
……….(2.4)
Dimana :
T = torsi (N-m)
r = jari-jari rotor (m)
K = konstanta (bergantung pada ukuran fisik motor)
= fluksi setiap kutub
= arus jangkar (A)
P = jumlah kutub
z = jumlah konduktor
a = cabang pararel
II..4 Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh
mengalirnya arus pada jangkar, di mana jangkar tersebut berada di dalam medan
magnet. Reaksi jangkar menyebabkan terjadinya 2 hal, yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama.
2. Magnetisasi silang.
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak
dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal
untuk kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju
Gambar 2.9 Fluksi Yang Dihasilkan Oleh Kumparan Medan Dari gambar 2.9 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis.
Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor di mana
konduktor bergerak sejajar dengan garis gaya magnet sehingga gaya gerak listrik
induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari gambar
2.11 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena itu,
bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah
arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari
fluksi medan utama, di mana vektor ini tegak lurus terhadap bidang netral magnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara
kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul ggm
atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada gambar 2.10 berikut
ini :
U
S
O M
Bidang Netral Magnetis
Sikat
Gambar 2.10 Fluksi Yang Dihasilkan Oleh Kumparan Jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar
ditentukan dengan aturan putaran sekrup (cork-screw rule). Besar dan arah garis gaya
magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral
magnetis. Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan
konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan
diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi
medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami
pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut
dikarenakan pengaruh fluksi jangkar yang dapat dilihat dari gambar 2.11 berikut ini
U
S
Gambar 2.11 Hasil Kombinasi Antara Fluksi Medan dan Fluksi Jangkar
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang
U
S
Bidang Netral Magnetis
O
fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan
penurunan kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi
kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas
medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi
medan utama ini disebut sebagai reaksi jangkar magnetisasi-silang (
cross-magnetization).
Magnetisasi-silang ini juga menyebabkan pergeseran bidang netral. Pada
Gambar 2.11 terlihat bahwa vektor OFr merupakan resultan vektor OFA dan OFM,
serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurus terhadap
vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh β karena posisi
bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran
bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral
magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator dekat sikat.
Kebanyakan mesin listrik bekerja pada kerapatan fluksi yang dekat dengan
titik jenuhnya, sehingga dapat menimbulkan kejenuhan magnetik. Pengaruh
kejenuhan magnetik terhadap fluksi medan utama dapat dijelaskan dengan bantuan
Gambar 2.12 Kurva Pemagnetan Saat Terjadi Reaksi Jangkar
Misalkan fluks sebesar Ox adalah fluksi dihasilkan medan utama tanpa
dipengaruh reaksi jangkar. Misalkan pula dengan adanya reaksi jangkar
pertambahan-pengurangan kuat medan magnet (ggm) yang terjadi pada kutub medan sebesar B
ampere-lilitan. Pada lokasi di permukaan kutub di mana gaya gerak magnet (ggm)
rotor menambahkan ggm kutub terjadi penambahan kerapatan fluks sebesar xy.
Sedangkan pada lokasi permukaan kutub di mana ggm rotor mengeliminir ggm kutub
terjadi penurunan kerapatan fluksi sebesar xz, di mana harga xz lebih besar dari pada
xy. Oleh karena itu, penjumlahan rata-rata kerapatan fluks yang terjadi adalah
kerapatan fluks kutub yang semakin berkurang. Hal inilah yang disebut sebagai efek
demagnetisasi reaksi jangkar dan perlu dicatat bahwa demagnetisasi timbul hanya
karena adanya saturasi magnetik. Untuk mengatasi reaksi jangkar ada tiga cara yang O
Φ
gg z
x y
II.4.1 Pergeseran Sikat (Brush Shifting)
Ide dasarnya adalah dengan memindahkan sikat seirama dengan perpindahan
bidang netral untuk menghindari percikan bunga api yang timbul. Namun dalam
penerapannya hal ini cukup sulit karena jarak perpindahan bidang netralnya sangat
ditentukan oleh besarnya beban yang dipikul, maka jarak perpindahan bidang
netralnya pun berpindah, sehingga sikat harus juga diubah setiap saat, seirama dengan
perubahan jarak perpindahan bidang netral. Selain itu pergeseran sikat akan
memperburuk melemahnya fluks akibat reaksi jangkar mesin, selain dengan metode
ini mesin arus searah tidak dimungkinkan untuk bekerja sebagai generator (akan
menimbulkan percikan api yang lebih besar), dan sangat tidak ekonomis terutama
untuk mesin-mesin berukuran kecil.
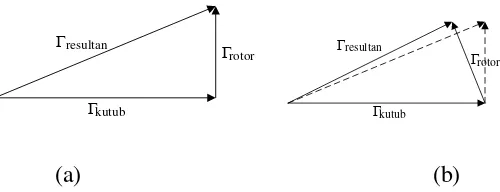
Adapun efek diperburuknya fluks akibat reaksi jangkar dapat dilihat pada
Gambar 2.13 berikut ini. Pada gambar 2.13 (a) diperlihatkan kondisi ketika bidang
netral mesin bergeser (lihat gambar segitiga ggm-nya), sedangkan pada gambar 2.13
(b) terlihat bidang netral yang bergeser disertai dengan bergesernya sikat mesin.
Akibat pergeseran tersebut (lihat gambar segitiga ggm-nya), terlihat ggm resultannya
Γ Γ
Γ
kutub resultan
rotor Γresultan Γrotor
Γkutub
(a) (b)
Gambar 2.13 Pelemahan Ggm Akibat Pergeseran Bidang Netral
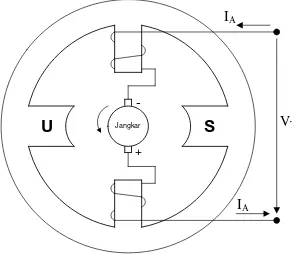
II.4.2 Penambahan kutub bantu (interpole)
Ide dasar penambahan kutub bantu (interpole) yaitu jika tegangan pada
kawat-kawat yang sedang melakukan proses komutasi penyearahan dibuat nol, maka tidak
akan terdapat percikan bunga api pada sikat-sikat mesin tersebut. Untuk itu,
kutub-kutub kecil yang disebut kutub-kutub komutasi ditempatkan ditengah-tengah diantara
kutub-kutub utama. Interpole ini dihubungkan seri terhadap kumparan rotor.
Sehingga dengan adanya fluks dari interpole ini akan dapat mencegah/mengurangi
adanya tegangan yang muncul pada kawat-kawat yang sedang melakukan proses
komutasi.
Ketika beban yang dipikul mesin meningkat dan arus rotor pun meningkat,
besarnya perubahan/ pergeseran bidang netral meningkat pula. Hal tersebut akan
menyebabkan timbulnya tegangan pada konduktor-konduktor yang sedang
melakukan komutasi. Pada saat itu fluks interpole juga meningkat, menghasilkan
tegangan pada konduktor-konduktor tersebut dan berlawanan dengan tegangan yang
Jangkar
U S
-+
IA
IA
VT
Gambar 2.14 Motor DC yang Dilengkapi Dengan Kutub Bantu
II.4.3 Belitan Kompensasi (Compensating Windings)
Belitan kompensasi ini dihubungkan seri terhadap kumparan, rotor belitan ini
bertujuan untuk mengurangi penyimpangan yang timbul akibat reaksi jangkar. Fluks
yang ditimbulkan oleh reaksi jangkar diimbangi oleh fluks yang ditimbulkan oleh
belitan kompensasi yang besarnya sama dan berlawanan. Ketika beban berubah,
maka reaksi jangkar yang berubah akan selalu diimbangi oleh fluks belitan
kompensasi, sehingga bidang netralnya tidak bergeser.
Teknik ini memiliki kelemahan karena mahal harganya, dan juga masih
memerlukan interpole untuk mengatasi tegangan yang tidak dapat diatasi oleh belitan
kompensasi. Karenanya teknik ini digunakan untuk motor-motor yang bekerja ekstra
berat, dimana pelemahan fluks akan menjadi masalah yang serius.
II.5 GGL Lawan Pada Motor Arus Searah
medan magnetik maka pada konduktor tersebut akan timbul GGL induksi yang
diinduksikan pada konduktor tersebut dimana arahnya berlawanan dengan tegangan
yang diberikan pada motor. Karena arahnya melawan, maka hal tersebut disebut GGL
lawan.
Besarnya tegangan yang diinduksikan tersebut sesuai dengan persamaan berikut:
...(2.5)
Persamaan tegangan secara umum dapat ditulis sebagai berikut:
...(2.6)
Dimana:
...(2.7)
II.6 Jenis-Jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis penguatannya,
yaitu hubungan rangkaian kumparan medan dengan kumparan jangkar. Sehingga
motor arus searah dibedakan menjadi :
II.6.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber
tegangan penguatannya berasal dari luar motor. Di mana kumparan medan disuplai
Rangkaian ekivalen motor arus searah penguatan bebas
Gambar 2.15 Motor Arus Searah Penguatan Bebas Persaman umum motor arus searah penguatan bebas
... (2.8)
...(2.9)
Dimana:
= tegangan terminal jangkar motor arus searah (volt)
= arus jangkar (Amp)
= tahanan jangkar (ohm)
= arus medan penguatan bebas (amp)
= tahanan medan penguatan bebas (ohm)
= tegangan terminal medan penguatan bebas (volt)
= gaya gerak listrik motor arus searah (volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan.
II.6.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri dibagi atas tiga yaitu:
II.6.2.1 Motor Arus Searah Penguatan Shunt
Rangkaian ekivalen motor arus searah penguatan shunt
Gambar 2.16 Motor Arus Searah Penguatan Shunt
Persamaan umum motor arus searah penguatan shunt
...(2.10)
...(2.11)
...(2.12)
Dimana :
= arus kumparan medan shunt (ohm)
= tegangan terminal medan motor arus searah (volt)
= tahanan medan shunt (ohm)
II.6.2.2 Motor Arus Searah Penguatan Seri
Rangkaian ekivalen motor arus searah penguatan seri
Gambar 2.17 Motor Arus Searah Penguatan Seri
Persamaan umum motor arus searah penguatan seri:
...(2.13)
...(2.14)
...(2.15)
Dimana:
= arus kumparan medan seri (amp)
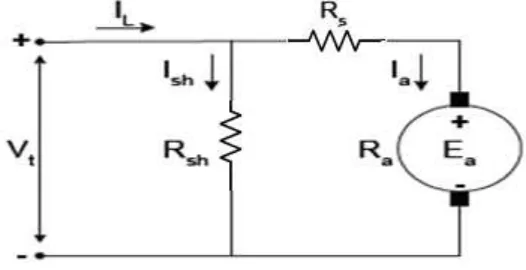
II.6.2.3 Motor Arus Searah Penguatan Kompond
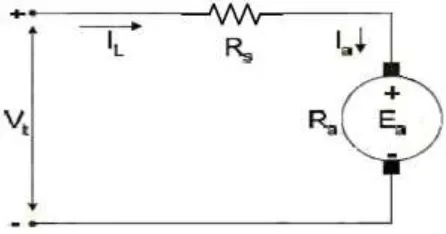
II.6.2.3.1 Motor Arus Searah Penguatan Kompond Pendek
Rangkaian ekivalen motor arus searah penguatan kompond pendek
Gambar 2.18 Motor Arus Searah Penguatan Kompond Pendek
Persamaan umum motor arus searah penguatan kompond pendek:
...(2.16)
...(2.17)
...(2.18)
= tegangan jatuh pada kumparan seri
= rugi daya pada kumparan seri
= tegangan jatuh pada kumparan armatur
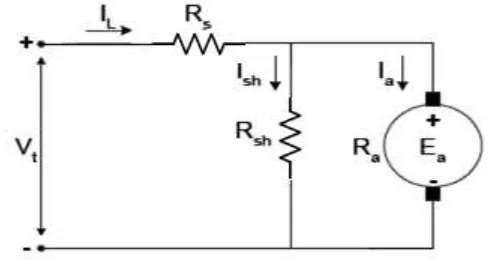
II.6.2.3.2 Motor Arus Searah Penguatan Kompond Panjang
Rangkaian ekivalen motor arus searah penguatan kompond panjang
Gambar 2.19 Motor Arus Searah Penguatan Bebas
Persamaan umum motor arus searah penguatan kompond panjang:
...(2.19)
...(2.20)
...(2.21)
...(2.22)
= tegangan jatuh pada kumparan seri
= rugi daya pada kumparan seri
= rugi daya pada kumparan shunt
= rugi daya armatur
II.7 Karakteristik Motor Arus Searah
Untuk motor DC penguatan seri dan shunt hanya memiliki satu komponen
Berikut ini tiga karakteristik dari sebuah motor DC penguatan kompond panjang:
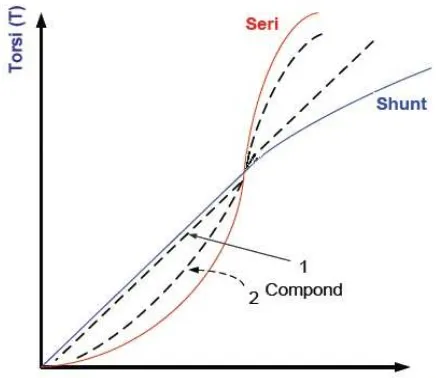
1. Karakteristik Torsi (
Dengan pertambahan arus jangkar ( ) sehingga ( ) bertambah dan torsi (T)
juga besar. Dari persamaan (2.3) yakni:
dimana
). ...(2.23)
Jika fluksi medan shunt lebih besar dibandingkan medan seri maka bentuk
karakteristik torsi dan arus seperti kurva1. Sedangkan jika fluksi medan seri lebih
besar dibandingkan dengan medan shunt maka bentuk karakteristik torsi dan arus
seperti kurva 2. Gambar karakteristik untuk torsi dan arus dapat dilihat seperti berikut
ini:
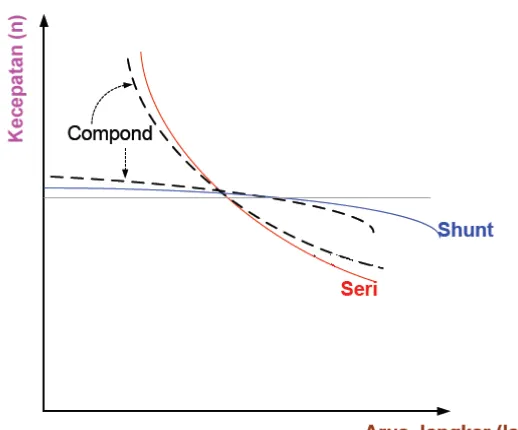
2. Karakteristik Putaran
Untuk motor kompond panjang:
...(2.24)
...(2.25)
...(2.26)
Jadi: ...(2.27)
Dengan pertambahan arus jangkar ( ), f;uks ( ) juga akan bertambah dan
berkurang. Dengan pertambahan arus jangkar maka kecepatan
jatuh pada motor kompond lebih cepat dibandingkan dengan motor arus shunt.
Karakteristik dari kecepatan dengan arus jamgkar dapat digambatkan seperti berikut
ini:
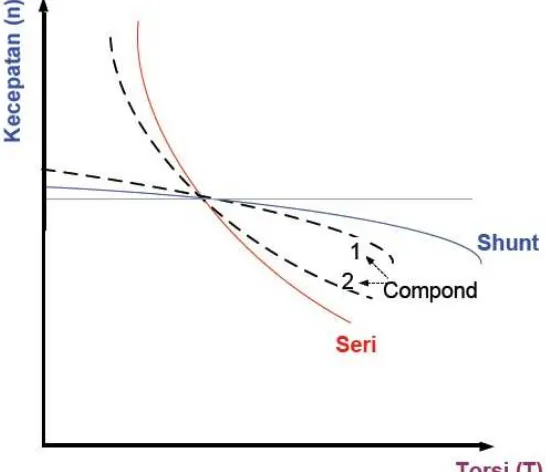
3. Karakteristik Mekanis (T = T(n)).V
Ini merupakan kurva antara kecepatan (n) dan torsi(T) dari motor DC. Jika torsi
T =k. bertambah, maka nilai ( ) bertambah, sedangkan fluks ( ) tetap. Dengan
bertambahnya torsi (T) maka kecepatan (n) akan menurun, maka kurva motor
kompond ini sama dengan motor shunt. Untuk medan shunt karakteristik kecepatan
dan torsi ini mendekati kemotor shunt separti kurva 1. Sedangkan untuk medan seri
karakteristik kecepatan dan torsi mendekati kemotor seri seperti pada kurva 2.
Gambar dari karakteristik kecepatan dan torsi dapat dilihat seperti berikut:
BAB III
UJI RETARDATION
III.1 UmumMetode (uji retardation) ini diterapkan untuk motor atau generator arus searah
pararel, unuk mencari rugi-rugi butanya. Sedangkan rugi tembaga jangkar dan medan
pararel pada saat arus beban mengalir dapat diketahui, sehingga efisiensinya dapat
dihitung.
Mesin yang diuji diputar kecepatanya sedikit lebih tinggi dari pada kecepatan
normalnya, setelah itu catu daya diputus dari kumparan jangkar sambil tetap menjaga
penguatan kumparan medannya.maka putaran rotor akan melemah dan energy
kinetiknya digunakan untuk mendapatkan data rugi-rugiputaran (rugi-rugi gesekan,
angin dan besi).
Rugi besi termasuk dalam rugi-rugi putaran dikarenakan pada saat putaran
rotor melemah, penguatan medannya masih ada (tetap dijaga). Jika putaran kumparan
jangkar diperlambat tanpa adanya penguatan maka energy jangkar digunakan untuk
mengatasi rugi mekanis saja, tidak terdapat rugi besinya karena tidak adanya fluks.
Besarnya energi kinetik dari putaran jangkar atau rotor (rugi-rugi putaran)
Maka di dalam metode retardasi ini, laju perubahan energi kinetik dianggap untuk
mengatasi rugi – rugi rotasi motor. Jika laju perubahan energi kinetik ini disimbolkan
dengan ∆w, maka
III.2 Menentukan dw/dt
Pada pengujian dengan menggunakan metode ini digunakan rangkaian seperti
gambar 3.1 dibawah
Gambar 3.1 Rangkaian Uji Perlambatan Mesin Arus Searah
Seperti terlihat pada gambar 3.1 diatas sebuah Voltmeter Vdihubungkan dengan
Ketika catu daya diputus, kecepatan putar jangkar menurun dan juga tegangan
yang ditunjukkan oleh Voltmeter menurun. Dengan memperhatikan jumlah yang
berada dari tegangan yang jatuh (menurun) pada lamanya waktu yang berbeda,
sebuah kurva digambarkan antara waktu dan kecepatan (didapat dari nilai
tegangannya).
Gambar 3.2 Kurva Hasil Uji Perlambatan Arus Searah.
Dari gambar P yang dihubungkan ke kecepatan normal, sudut tegangan AB
digambar, kemudian:
III.3 Menentukan Momen Inersia
III.3.1 Metode Dengan Menghitung Momen Inersia
Pertama-tama kurva penurunan (retardasi) digambar dengan jangkar saja.
Kemudian roda gila-dari momen inersia dikunci pada poros dan kurva penurunan
digambar kembali. Tentu saja waktu perlambatan akan lebih lama karena adanya
kombinasi peningkatan momen inersia. Untuk tiap kecepatan yang diberikan,
dan , ditentukan seperti sebelumnya.
Perlu dicatat bahwa rugi-rugi pada kedua kasus hampir sama, karena penambahan
roda-gila tidak banyak membuat perbedaan pada rugi-rugi.
Karena dari persamaan (B) di atas:
Pada kasus pertama,
Pada kasus kedua,
III.3.2 Metode Dengan Mengeliminasi Momen Inersia
Pada metode ini, pertama-tama waktu diambil untuk memperlambat,
katakanlah 5%, dicatat dengan jangkar saja. Berikutnya, kopel perlambatan mekanis
atau elektris dipasok ke jangkar dan waktu dicatat lagi. Metode menggunakan kopel
elektris diperlihatkan pada gambar 3.1 saklar ganda S ketika memutus jangkar dari
catu dayanya, secara otomatis menghubungkannya dengan resistansi.
Daya yang ditarik oleh resistansi ini berlaku sebagai kopel perlambatan pada
jangkar, dengan cara demikian membuatnya menjadi lambat secara cepat.
Rugi-rugi tambahan =
Dimana : arus rata-rata melalui R; V = tegangan rata-rata di R. Ambil sebagai
daya ini. Kemudian, dari persamaan (4.1) :
Dimana :
dN/ kisar perubahan kecepatan tanpa beban tambahan.
BAB IV
MENENTUKAN RUGI-RUGI MOTOR ARUS SEARAH KOMPOND PENDEK DENGAN MENGGUNAKAN METODE RETARDATION
IV.1 Metode Retardasi Dalam Menentukan Rugi – Rugi dan Efisiensi Motor DC Kompond Pendek
IV.1.1 Prinsip Dasar Metode Retardasi
Metode ini merupakan metode yang paling baik dan sederhana untuk
menentukan rugi – rugi konstan mesin DC yang beroperasi dengan kecepatan konstan
yaitu motor atau generator DC kompon pendek. Dengan menjalankan metode ini
maka akan dapat diketahui rugi – rugi rotasi meliputi rugi – rugi besi dan mekanis
(gesek dan angin) dari mesin yang diuji. Selanjutnya dengan mengetahui rugi – rugi
tembaga kumparan pada saat berbeban, efisiensi mesin dapat dihitung pada saat
pembebanan tersebut.
Anggap suatu motor DC kompon pendek bekerja pada saat tanpa beban.
1. Jika suplai ke jangkar dilepas tetapi medan tetap dieksitasi normal, motor
tersebut mulai melambat secara bertahap dan akhirnya berhenti. Energi
kinetik jangkar digunakan untuk mengatasi rugi – rugi gesek dan angin dan
rugi – rugi besi.
2. Jika suplai jangkar dan medan shunt dilepas bersamaan, motor juga akan
melambat dan akhirnya berhenti. Sekarang juga energi kinetik jangkar
Dengan menjalankan pengujian yang pertama, kita akan mendapatkan nilai
rugi – rugi gesek, angin dan besi. Namun demikian, jika kita juga menjalankan
pengujian yang kedua, kita dapat memisahkan antara rugi – rugi gesek dan angin
dengan rugi – rugi besi.
Energi kinetik jangkar ditentukan dengan persamaan :
2
Maka di dalam metode retardasi ini, laju perubahan energi kinetik dianggap untuk
mengatasi rugi – rugi rotasi motor. Jika laju perubahan energi kinetik ini disimbolkan
Dengan mengetahui nilai momen inersia jangkar (J) dan nilai perubahan kecepatan
dari percobaan, maka perhitungan rugi – rugi rotasi pada Motor DC
Kompond Pendek dapat ditentukan. Setelah rugi – rugi rotasi diketahui maka rugi –
rugi konstan Wc motor DC Kompon Pendek dapat diketahui yaitu:
Wc = Wrot + Wsh...(4.3)
Dimana : Wsh = (Ish)2 x (Rsh + Rfsh)
Rfsh = Tahanan Luar yang dihubungkan secara seri ke Medan Penguatan
Shunt untuk mengatur Ish motor.
IV.1.2 Metode Pengukuran Momen Inersia Pada Jangkar Motor DC Kompnd pendek
Di dalam uji retardasi, rugi – rugi rotasi diberikan dengan persamaan (4.2)
[B.L.Theraja hal 744] :
W = Watt
Untuk mendapatkan nilai w, nilai J harus diketahui terlebih dahulu. Tentunya sulit
untuk menentukan J secara langsung atau dengan perhitungan. Oleh karena itu, perlu
dilaksanakan percobaan yang lain sebagai perbandingan untuk mendapatkan nilai
inersia jangkar motor tersebut. Percobaan ini disebut dengan metode roda pejal. Mula
– mula, pengujian retardasi dilakukan dengan rotor sendiri dan nilai dn/dt1 diukur dan
dicatat. Selanjutnya, sebuah roda pejal yang diketahui momen inersianya (J1)
dicatat. Karena penambahan roda pejal tidak mempengaruhi rugi-rugi rotasi secara
materialnya dari kedua kasus maka,
Untuk kasus pertama, W =
rotasi (W) dapat ditentukan.
IV.1.3 Spesifikasi Motor DC Kompond Pendek
Pengujian rugi – rugi dan efisiensi motor DC dengan metode retardasi
dilaksanakan di laboratorium Konversi Energi Listrik FT USU diterapkan pada :
Motor DC kompon pendek dengan rating sebagai berikut :
Ish = 0.64 A
n = 1500 rpm
Tahanan medan shunt (J-K) = 333,33 Ω
Tahanan Medan Seri (E-F) = 0,48 Ω
Tahanan Jangkar (GA-HB) = `1,5 Ω
Karena pada percobaan pembebanan Motor DC Kompond pendek adalah
pembebanan listrik, dimana beban listrik tersebut berupa tahanan geser yang akan
dihubungkan dengan generator DC, maka kita harus mengetahui juga spesifikasi dari
generator DC tersebut. Generator DC yang digunakan dalam percobaan ini adalah
generator DC penguatan bebas dengan rating sebagai berikut :
P = 1,2 kW
IL = 7,1 A
Ish = 0.177 A
n = 1400 rpm
Tahanan medan shunt (J-K) = 1,257 kΩ
Tahanan Jangkar (GA-HB) = 3,8 Ω
IV.1.4 Peralatan pengujian
Peralatan yang dipergunakan dalam pengujian ini terdiri dari :
a. Roda Pejal dengan massa 6,5 kg, diameter 26 cm.
b. Rangkaian kontrol terdiri dari Magnetic Contactor, Push Button ON/OFF dan
c. Instrumen Pengukuran terdiri dari amperemeter, voltmeter, tachometer, dan
stopwatch
d. Power Suplai terdiri dari PTAC Tiga phasa, PTDC dan Penyearah Dioda Tiga
Phasa Gelombang Penuh
e. Generator Arus Searah AEG 1,2 kW
f. Resistor Variabel.
Gambar 4.1 Roda Pejal
IV.1.5 Prosedur Pengujian
Di dalam ujian retardasi ini, dilakukan beberapa pengujian diantaranya :
1. Uji retardasi dengan rotor sendiri tanpa eksitasi
2. Uji retardasi dengan roda pejal tanpa eksitasi
3. Uji retardasi dengan rotor sendiri eksitasi penuh
4. Uji retardasi dengan roda pejal eksitasi penuh
5. Uji retardasi dengan pembebanan listrik
Selain pengujian di atas dilakukan juga pengujian lainnya yaitu :
1) Pengukuran tahanan jangkar motor
Rangkaian kontrol dalam uji retardasi ini ditunjukkan pada gambar berikut :
N N ON OFF
Gambar 4.2 Rangkaian Kontrol
Adapun prosedur pengujian – pengujian diatas dilaksanakan sebagai berikut:
IV.1.5.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi. 1) Rangkaian percobaan disusun seperti gambar berikut.
Gambar 4.3 Rangkaian Percobaan Uji Retardasi Dengan Rotor Sendiri Tanpa Eksitasi
2) Posisi power supply dalam keadaan minimum dan saklar S ditutup lalu tombol
ON ditekan.
3) Tegangan terminal motor dinaikkan dengan mengatur PTAC hingga pembacaan
voltmeter V sebesar 220 volt dan amperemeter A2 sebesar 0,64 Ampere.
4) Atur tahanan Rfsh hingga putaran motor mencapai nominal 1450 rpm.
Setelah tombol OFF ditekan, maka suplai tegangan motor akan terlepas dari
motor akan mulai mengalami perlambatan. Waktu penurunan kecepatan motor
dari 1550 rpm sampai 1450 diukur dengan stopwatch. Kemudian pembacaan
waktu stopwatch dicatat. Percobaan diulang kembali seperti pada poin 2 sampai
poin 5 sebanyak 10 kali.
IV.1.5.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi.
1) Rangkaian percobaan disusun seperti gambar dibawah ini. Roda pejal dipasang ke
ujung poros rotor lalu dikunci.
Gambar 4.4 Rangkaian Percobaan Uji Retardasi Dengan Roda Pejal Tanpa Eksitasi 2) Sama seperti prosedur percobaan uji retardasi dengan rotor sendiri tanpa eksitasi
IV.1.5.3 Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh 1) Rangkaian percobaan disusun seperti gambar berikut.
Gambar 4.5 Rangkaian Percobaan Uji Retardasi Dengan Rotor Sendiri Eksitasi Penuh
2) Posisi power supply dalam keadaan minimum dan saklar S ditutup lalu tombol
ON ditekan.
3) Tegangan terminal motor dinaikkan dengan mengatur PTAC hingga pembacaan
voltmeter V sebesar 220 volt dan amperemeter A2 sebesar 0,64 Ampere.
4) Atur tahanan Rfsh hingga putaran motor mencapai nominal 1550 rpm.
5) Motor dibiarkan berputar dengan kecepatan 1550 rpm dalam beberapa saat, lalu
bersiap – siap menekan tombol OFF dan menjalankan stopwatch bersamaan.
Setelah tombol OFF ditekan, maka suplai tegangan ke jangkar motor akan
terlepas sedangkan suplai medan tetap dipertahankan, maka motor akan
mengalami perlambatan. Waktu penurunan kecepatan motor dari 1550 rpm
sampai 1450 diukur dengan stopwatch. Kemudian pembacaan waktu stopwatch
dicatat. Percobaan diulang kembali seperti pada poin 2 sampai poin 5 sebanyak 10
IV.1.5.4 Uji Retardasi dengan Roda Pejal Eksitasi Penuh
1) Rangkaian percobaan disusun seperti gambar dibawah ini. Roda pejal dipasang ke
ujung poros rotor lalu dikunci.
Gambar 4.6 Rangkaian Percobaan Uji Retardasi Dengan Roda Pejal Eksitasi Penuh
2) Sama seperti prosedur percobaan uji retardasi dengan rotor sendiri eksitasi penuh
sampai langkah 5.
IV.1.5.5 Pengukuran Tahanan Jangkar Motor
1) Rangkaian percobaan disusun seperti gambar di bawah ini.
2) Power suplai dalam posisi minimum.
3) Saklar S ditutup, lalu tegangan PTDC dinaikkan sampai pembacaan amperemeter
menunjukkan arus nominal jangkar 6 Ampere
4) Kemudian pembacaan voltmeter dan amperemeter dicatat. Lalu nilai tahanan
jangkar dihitung dengan membagi nilai tegangan dengan arus dari hasil
P
T
D
C
M
+
-v A
GA
HB
Gambar 4.7 Rangkaian Percobaan Pengukuran Tahanan Jangkar
IV.1.5.6 Pengukuran Tahanan Medan Shunt Motor 1) Rangkaian percobaan disusun seperti gambar di bawah ini.
2) Power suplai dalam posisi minimum.
3) Saklar S ditutup, lalu tegangan PTAC dinaikkan sampai pembacaan amperemeter
menunjukkan arus nominal medan 0.64 Ampere
4) Kemudian pembacaan voltmeter dan amperemeter dicatat. Lalu nilai tahanan
jangkar dihitung dengan membagi nilai tegangan dengan arus dari hasil
percobaan.
IV.1.5.7 Pengujian Pembebanan Motor DC Kompon Pendek Pada Metode Retardasi
1) Rangkaian percobaan disusun seperti gambar di atas ini. Semua power suplai
dalam posisi minimum.
2) Saklar S1 ditutup lalu tegangan PTAC dinaikkan perlahan – lahan hingga
tegangan motor V1 mencapai nominal 220 volt dan Ish 0,64 Ampere. Dengan
mempertahankan tegangan nominal V1 sebesar 220 Volt kemudian atur tahanan
luar medan Rfsh sehingga motor mencapai putaran nominalnya yaitu 1500 rpm.
Catat nilai Ish motor (dimana nilai Ish harus sesuai dengan Ish pada saat percobaan
beban nol). Ingat, Pada saat kita menaikkan tegangan kita harus memperhatikan
Ish motor jangan sampai melewati nominalnya.
3) Saklar S2 ditutup lalu arus medan generator dinaikkan dengan PTDC sampai
nominal 0,177 Ampere. Dimana tahanan variable RL dalam kondisi maksimum.
4) Saklar S3 ditutup kemudianbeban generator diatur bervariasi mulai dari ¼ beban
penuh sampai mendekati beban penuh dengan menggeser tahanan variabel RL.
Jaga nilai V1 dan Ish motor agar tetap konstan dengan mengatur tahanan luar Rfsh.
5) Pembacaan voltmeter V1,amperemeter A1,A2 dan A3 serta putaran motor dicatat
pada kondisi pembebanan tersebut sehingga diperoleh data pembebanan untuk
Gambar 4.9 Rangkaian percobaan pembebanan motor DC Kompon Pendek Dengan Metode Retardasi
IV.1.6 Data Hasil Pengujian
Dari hasil pengujian di atas diperoleh data hasil percobaan sebagai berikut.
a) Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi (dn=1550 - 1450 rpm)
No. Perc dt1 (s) No. Perc dt1 (s)
I 0.78 VI 0.89
II 0.83 VII 0.89
III 0.83 VIII 0.89
IV 0.89 IX 0.94
V 0.91 X 0.91
dt1 rata – rata = 0.876 s
b) Uji Retardasi dengan Roda Pejal tanpa Eksitasi (dn = 1550 - 1450 rpm) No. Perc dt2 (s) No. Perc dt2 (s)
I 2.70 VI 2.69
II 2.69 VII 2.71
III 2.73 VIII 2.69
IV 2.71 IX 2.71
V 2.70 X 2.72
dt1 rata – rata = 2.705 s
Tabel 4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi
c) Uji Retardasi dengan Rotor sendiri Eksitasi penuh (dn =1550 – 1450 rpm) No. Perc dt3 (s) No. Perc dt3 (s)
I 0.28 VI 0.29
II 0.30 VII 0.30
III 0.29 VIII 0.30
IV 0.31 IX 0.31
V 0.29 X 0.29
dt1 rata – rata = 0.296 s
d) Uji Retardasi dengan Roda Pejal Eksitasi penuh (dn = 1550 – 1450 rpm) No. Perc dt4 (s) No. Perc dt4 (s)
I 0.86 VI 0.87
II 0.89 VII 0.99
III 0.92 VIII 0.98
IV 0.93 IX 0.90
V 0.85 X 0.86
dt1 rata – rata = 0.905 s
Tabel 4.4 Uji Retardasi dengan Roda Pejal Eksitasi penuh
e) Pengukuran Tahanan Jangkar Motor
V (volt) I (Ampere) R = I V
(ohm)
9 6 1.5
Tabel 4.5 Pengukuran Tahanan Jangkar Motor
f) Pengukuran Tahanan Medan Seri Motor
V (volt) I (Ampere) R = I V
(ohm)
2 4.11 0,48
g) Pengukuran Tahanan Medan Shunt Motor
Tabel 4.7 Pengukuran Tahanan Medan Shunt Motor
h) Data Hasil Pengujian Berbeban Motor DC Kompon Pendek pada Metode Retardasi
i) Data Hasil Pengujian Berbeban Generator DC pada Metode Retardasi
Tabel 4.8 Data Hasil Pengujian Berbeban Generator DC pada Metode Retardasi
IV.1.7 Analisa Data Pengujian IV.1.7.1 Umum
Dari data hasil pengukuran tahanan kumparan motor pada tabel data
percobaan 4.5 dan 4.6 diketahui besarnya tahanan jangkar motor sebesar 1,5 Ω,
tahanan kumparan medan serinya sebeser 0,48 Ω dan tahanan kumparan medan shunt
sebesar 333,33 Ω. Untuk menjaga I sh nominal motor DC kompond pendek maka
digunakan tahanan Rfsh yang diserikan pada kumparan medan Rsh dimana Rfsh yang
digunakan sebesar 240 Ohm tetapi sesuai kebutuhannya untuk mengatur Ish yang
konstan tahanan Rfsh yang digunakan dapat berkurang atau tetap ketika motor dalam
kondisi berbeban. Sedangkan tahanan variabel RL yang digunakan sebesar 120 Ohm.
Dimana untuk mencapai beban penuh motor nilai RL akan terus berubah.
IL motor. Nilai IL nominal motor yaitu 9,1 Ampere dimana nilai IL ini akan dibagi
menjadi 4 bagian sesuai kebutuhan dalam pengujian. Maka untuk ¼ beban penuh
nilai IL harus mencapai ± 2,3 A, ½ beban penuh ± 4,5 A, ¾ beban penuh ± 6,8 A dan
beban penuh ± 9,1 A.
IV.1.7.2 Perhitungan Momen Inersia Motor DC Kompond Pendek
Data hasil pengujian yang diperoleh dapat dianalisa sebagai berikut. Dari data tabel 4.1 dan tabel 4.2 dapat ditentukan besarnya nilai momen inersia jangkar
motor. Sebagaimana telah dijelaskan dalam sub bab sebelumnya bahwa inersia
jangkar motor dapat dihitung dengan persamaan:
J1 =
J2 = Momen Inersia roda pejal yang dihitung dengan persamaan :
J = 2 2 1
Mr (Kgm2)
t1 = selang waktu yang dibutuhkan untuk penurunan kecepatan jangkar
motor dengan rotor sendiri dalam kondisi tanpa eksitasi (detik)
t2 = selang waktu yang dibutuhkan untuk penurunan kecepatan jangkar
motor dengan roda pejal dalam kondisi tanpa eksitasi (detik)
Dari data perhitungan diketahui J2 = 0,055 Kgm2 dan dari data pengamatan diperoleh
Jadi, momen inersia jangkar motor DC kompond pendek tersebut adalah 0,0263
Kgm2.
IV.1.7.3 Perhitungan Rugi – Rugi dan Efisiensi Motor DC Kompon Pendek Dengan diketahuinya momen inersia jangkar motor maka rugi – rugi rotasi motor dapat dihitung sebagai berikut.
Dari data percobaan pada tabel 4.1 atau 4.2 dapat diketahui rugi – rugi gesek dan
angin motor yaitu :
Wg+a = 0,011 x J1 x n x
Dari hasil perhitungan diatas diperoleh nilai rugi gesek angin motor rata – rata 49,53 Watt. Selanjutnya dari tabel data percobaan 4.3 dan table 4.4 dapat diketahui besarnya rugi – rugi rotasi rotasi untuk kecepatan nominal 1500 rpm sebagai berikut :
Dari hasil perhitungan diatas diperoleh nilai rugi rotasi motor rata – rata 147,42 Watt. Kemudian dari hasil perhitungan rugi – rugi rotasi diatas dapat ditentukan nilai rugi –
rugi inti di dalam motor untuk rating putaran 1500 rpm dan arus medan shunt 0.40
Ampere yaitu :
Winti = Wrot – Wg+a = 147,42 – 49,53 = 97,89 Watt Sedangkan rugi – rugi kumparan medan shunt Wsh adalah :
Wsh = (Ish)2 x (Rsh + Rfsh)
= (0,40)2 x (333,33 + 240)
= 91,73 Watt
Maka rugi – rugi konstan Wc adalah sebesar :
Wc = Wrot + Wsh
= ( 147,42 + 91,73 ) Watt
= 239,15 Watt
Maka dari data percobaan pembebanan motor dapat dihitung efisiensi motor pada saat
berbeban sebagai berikut :
1) Perhitungan Rugi – rugi dan Efisiensi Motor DC Kompo Pendek Pada Saat ¼ Beban Penuh ( IL = ± 2,41 Ampere )
Data – data motor DC kompon pendek pada kondisi ¼ beban penuh adalah
sebagai berikut :
Vt : 220 Volt
IL : 2,41 Ampere
n : 1475 rpm
Maka dari data – data tersebut di atas kita dapat menghitung rugi – rugi pada
motor DC kompon pendek pada kondisi ¼ beban penuh yaitu :
Pin = Vt . IL = 220 x 2,41 = 530,2 Watt
Wc = Wrot + Wsh = 239,15 Watt
Wa = Ia2.Ra = (2,01)2 x 1,5 = 6,06 Watt
Watt
Wbd = 2.Ia = 2 x 2,01 = 4,02 Watt
Maka,Rugi – rugi total pada Motor DC kompon pendek pada saat ¼ Beban Penuh :
Σ W = Wc + Wa + Wbd +
Σ W = (239,15 + 6,06 + 4,02 + 2,73) Watt
= 251,96 Watt
Sehingga efisiensi Motor DC kompon pendek pada saat ¼ Beban Penuh :
ηm =
2) Perhitungan Rugi – rugi dan Efisiensi Motor DC kompon pendek Pada Saat ½ Beban Penuh ( IL = ± 4,99 Ampere )
Vt : 220 Volt
motor DC kompon pendek pada kondisi ½ beban penuh yaitu :
Pin = Vt . IL = 220 x 4,99 = 1097,8 Watt
Wc = Wrot + Wsh = 239,15 Watt
Wa = Ia2.Ra = (4,59)2 x 1,5 = 31,6 Watt
Watt
Wbd = 2.Ia = 2 x 4,59 = 9,18 Watt
Maka,Rugi – rugi total pada Motor DC kompon pendek pada saat ½ Beban Penuh :
Σ W = Wc + Wa + Wbd +
Σ W = (239,15 + 31,6 + 9,18 + 11,7) Watt
= 291,63 Watt
Sehingga efisiensi Motor DC kompon pendek pada saat ½ Beban Penuh :
3) Perhitungan Rugi – rugi dan Efisiensi Motor DC Kompon Pendek Pada Saat
motor DC kompon pendek pada kondisi ¾ beban penuh yaitu :
Pin = Vt . IL = 220 x 6,56 = 1443,2 Watt
Wc = Wrot + Wsh = 239,15 Watt
Wa = Ia2.Ra = (6,16)2 x 1,5 = 56,92 Watt
Watt
Wbd = 2.Ia = 2 x 6,16 = 12,32 Watt
Maka,Rugi – rugi total pada Motor DC kompon pendek pada saat ¾ Beban Penuh :
Σ W = Wc + Wa + Wbd +
Σ W = (239,15 + 56,92 + 12,32 + 20,23) Watt
= 328,62 Watt
Sehingga efisiensi Motor DC kompon pendek pada saat ¾ Beban Penuh :
= x 100 %
= 77,23 %
4) Perhitungan Rugi – rugi dan Efisiensi Motor DC Kompon Pendek Pada Saat Beban Penuh ( IL = ± 8,97 Ampere )
Data – data motor DC kompon pendek pada kondisi beban penuh adalah sebagai
berikut :
Vt : 220 Volt
IL : 8,97 Ampere
Ia : 8,57 Ampere
Ish : 0,40 Ampere
n : 1400 rpm
Maka dari data – data tersebut di atas kita dapat menghitung rugi – rugi pada
motor DC kompon pendek pada kondisi beban penuh yaitu :
Pin = Vt . IL = 220 x 8,97 = 1973,4 Watt
Wc = Wrot + Wsh = 239,15 Watt
Wa = Ia2.Ra = (8,57)2 x 1,5 = 110,17 Watt
Watt
Wbd = 2.Ia = 2 x 8,57 = 17,14 Watt
Maka,Rugi – rugi total pada Motor DC kompon pendek pada saat Beban Penuh :
Σ W = Wc + Wa + Wbd +
Sehingga efisiensi Motor DC kompon pendek pada saat Beban Penuh :
Dari hasil analisa data rugi – rugi dan efisiensi motor DC Kompond Pendek dengan
beban bervariasi metode retardasi dapat disusun tabel 4.9 sebagai berikut :
Beban
Tabel 4.9 Data Rugi – rugi dan Efisiensi Motor DC Kompond Pendek dengan beban bervariasi pada Metode Retardasi
Dari hasil pengujian berbeban Motor DC Kompond Pendek dengan metode retardasi
dapat disimpulkan efisiensi terbaik motor didapat pada saat motor dalam kondisi
beban penuh yaitu 79,51 % (dalam hal ini syarat efisiensi terbaik motor yaitu rugi
konstan = rugi tembaga dimana dalam pengujian ini nilai rugi tembaga motor
BAB V
KESIMPULAN DAN SARAN
V.1 Kesimpulan
Dari hasil percobaan diatas dapat disimpulkan :
a. Dari hasil pengujian berbeban Motor DC Kompond Pendek dengan metode
retardasi dapat disimpulkan efisiensi terbaik motor didapat pada saat motor
dalam kondisi beban penuh yaitu 79,51 % (dalam hal ini syarat efisiensi
terbaik motor yaitu rugi konstan = rugi tembaga dimana dalam pengujian ini
nilai rugi tembaga motor mendekati nilai rugi konstan motor )
b. Dari hasil perhitungan didapat besarnya momen inersia motor kompond
pendek adalah 0.0263 Kg
V.2 Saran
a. disarankan untuk penelitian selanjutnya agar meneliti motor yang digunakan motor kompon panjang
b. disarankan untuk penelitian selanjutnya agar menggunakan rangkaian control
yang mampu mempadukan penurunan putaran yang kita inginkan dengan
DAFTAR PUSTAKA
1.
Chapman, stephen J, ”Electric Machinery Fundamentals,Mc Graw-hill Intarnational Edition, 19992.
Dubey,Gopal K, ”Power Semiconductor Controlled Driver”,Prentice Hall, Englewood Cliffs, New Jersey,1989.3 P.S. Bimbra, “Electrical Machinery”, Khana Publisher,1990.
4. Sumanto, ”Mesin Arus Searah”, Andi Offset, Yogyakarta, 1991.
5. Rijono,yon, “Dasar Teknik Tenaga Listrik”, Jakarta,1997.
6.
Theraja, B.L, “A Text Book Of Electrical Technology”, Nurja Constuction & Development, New Delhi, 19897. Wijaya,Mochtar, “Dasar-Dasar Mesin Listrik”,djambatan,Jakarta,2001.
8. Zuhal,”Dasar Teknik Tenaga Listrik dan Elektronika daya”,Gramedia Pustaka