UJI REGENERATIF (UJI HOPKINSON) DALAM MENENTUKAN RUGI-RUGI DAN EFISIENSI MOTOR DC SHUNT
(Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan untuk memenuhi salah satu syarat dalam menyelesaikan Pendidikan Sarjana (S-1) pada
Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara Oleh
WOSVI SIRINGORINGO 050402097
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
i
KATA PENGANTAR
Pujian dan ucapan syukur kepada Tuhan Yang Maha Esa atas segala kasihnya yang menyertai penulis setiap saat selama perkuliahan., dalam pelaksanaan penelitian tugas akhir ini, dan saat penyusunan laporan tugas akhir.
Tugas akhir ini merupakan bagian kurikulum yang harus di selesaikan untuk
memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro Fakultas Teknik, Universitas Sumatera Utara, penulis berjudul :
UJI REGENERATIF (UJI HOPKINSON) DALAM MENENTUKAN RUGI-RUGI DAN EFISIENSI MOTOR DC SHUNT
Penulis menyampaikan rasa hormat dan terima kasih yang sebesar-besarnya kepada orang tua saya, Almarhum Jananti Siringoringo dan Ibunda Tercinta Anna Marsintauli Simarmata yang telah membesarkan, mendidik dan terus membimbing serta mendoakan saya. Juga rasa sayang kepada adek saya Binsar, dan kepada abang saya Pak Putra, Ramson, Reman,dan Kakak saya Helena.
Dalam kesempatan ini, penulis juga menyampaikan ucapan terima kasih yang sebesar-besarnya kepada:
1. Bapak Ir.Sumantri Zulkarnaen, selaku dosen Pembimbing Tugas Akhir, atas segala bimbingan, pengarahan dan motivasi dalam menyelesaikan Tugas Akhir ini.
2. Bapak Soeharwinto ST,MT selaku dosen Wali penulis, atas bimbingan dan arahannya dalam menyelesaikan perkuliahan.
3. Bapak Ir.Surya Tarmizi Kasim,Msi selaku Ketua Departemen Teknik Elektro FT-USU dan Bapak Rahmat Fauzi, MT, selaku Sekretaris Departemen Teknik Elektro FT-USU.
ii 5. Teman-teman angkatan ’05 Teknik Elektro USU, Colin, Richard , Jonson, Darwin
Bolon, Josep, Dansem, dan lain-lain yang tak dapat penulis sebutkan satu persatu. 6. Dan pihak-pihak yang tidak dapat penulis sebutkan satu persatu.
Akhir kata, tugas akhir ini masih jauh dari sempurna, masih banyak kesalahan dan kekurangan, namun penulis tetap berharap semoga tugas akhir ini bisa bermanfaat dan memberikan inspirasi bagi pengembangan selanjutnya.
Medan, April 2011
iii Abstrak
Pada saat motor DC menerima daya masukan berupa energi listrik dan menghasilkan daya keluaran berupa energi mekanis, tidak seluruh daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energy yang terbuang selama proses pengkonversian tersebut.
Sejumlah energi yang diserap atau terbuang selama proses pengkonversian energi ini dianggap sebagai rugi-rugi di dalam motor DC. Untuk dapat mengetahui nilai rugi-rugi ini, dilakukan suatu pengujian terhadap motor DC tersebut dengan menerapkan metode-metode yang sesuai. Salah satu metode yang paling baik dan mudah dibahas di dalam tugas akhir ini yaitu uji regeneratif (uji hopkinson) yang dilaksanakan pada motor DC shunt untuk
iv DAFTAR ISI
Kata Pengantar ... i
Abstrak... iii
Daftar Isi ... iv
Daftar Gambar ... vi
BAB I PENDAHULUAN I.1 Latar Belakang ... 1
I.2 Tujuan Penulisan dan Manfaat Penulisan ... 2
I.3 Batasan Masalah ... 2
I.4 Metode Penulisan ... 3
I.5 Sistematika Penulisan ... 3
BAB II MOTOR ARUS SEARAH II.1 Umum ... 5
II.2 Konstruksi Motor Arus Searah ... 5
II.3 Prinsip Kerja Motor Arus Searah Penguatan Shunt ... 9
II.4 Rangkaian Ekivalen Motor Arus Searah Penguatan Shunt ... 11
II.5 GGL Balik Pada Motor Arus SearahPenguatan Shunt ... 12
II.6 Persamaan Tegangan dan Daya Motor Arus Searah Penguatan Shunt... 14
II.7 Pengaturan Kecepatan Motor DC Penguatan Shunt ... 15
II.8 Karakteristik Motor Arus Searah Shunt ... 18
BAB III UJI REGENERATIF (UJI HOPKINSON) DALAM MENENTUKAN RUGI-RUGI DAN EFISIENSI MOTOR DC SHUNT III.1 Umum ... 21
III.2 Jenis Rugi-Rugi Di Dalam Motor Arus Searah ... 21
III.3 Efisiensi Motor Arus Searah ... 28
IV.4 Metode Pengujian Motor Arus Searah Dalam Menentukan Rugi-rugi dan Efisiensi... 29
v BAB IV PENERAPAN UJI REGENERATIF (UJI HOPKINSON) PADA MOTOR DC
SHUNT
IV.1 Umum ... 33
IV.2 Peralatanyang digunakan dalam percobaan ... 33
IV.3 Rangkaian Pengujian ... 34
IV.4 Prosedur Pengujian ... 34
IV.5 Data Pengujian ... 35
IV.6 Analisa Data Pengujian ... 36
BAB V PENUTUP V.1 Kesimpulan ... 45
V.2 Saran ... 46
vi Daftar Gambar
Gambar 2.1 Konstruksi Motor Arus Searah Bagian Stator ... 5
Gambar 2.2 Konstruksi Motor Arus Searah Bagian Rotor ... 6
Gambar 2.3 Kaidah Tangan Kiri Fleming... 10
Gambar 2.4 Perubahan Garis Gaya Disekitar Kawat Berarus ... 10
Gambar 2.5 Belitan Berarus Listrik Terletak Dalam Medan Magnet ... 11
Gambar 2.6 Arah putaran pada kumparan berarus yang terletak dalam medan magnet .... 11
Gambar 2.7 Rangkaian Ekivalen Mortor DC Shunt ... 11
Gambar 2.8 Rangkaian Ekivalen Mortor DC Shunt……….. 12
Gambar 2.9 Metode Pengaturan fluks ... 16
Gambar 2.10 Metode pengaturan tahanan jangkar ... 17
Gambar 2.11 Rangkaian motor DC shunt dan Karakteristik Ta/ Ia ... 18
Gambar 2.12 Kurva karakteristik n/Ia dan karakterisrik n/Ta... ... 20
Gambar 3.1 Diagram Aliran Daya Pada Motor Arus Searah ... 21
Gambar 3.2 Perputaran Jangkar Didalam Motor Dua Kutub ... 25
Gambar 3.3 Arus Pusar Didalam Inti Jangkar ... 26
iii Abstrak
Pada saat motor DC menerima daya masukan berupa energi listrik dan menghasilkan daya keluaran berupa energi mekanis, tidak seluruh daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energy yang terbuang selama proses pengkonversian tersebut.
Sejumlah energi yang diserap atau terbuang selama proses pengkonversian energi ini dianggap sebagai rugi-rugi di dalam motor DC. Untuk dapat mengetahui nilai rugi-rugi ini, dilakukan suatu pengujian terhadap motor DC tersebut dengan menerapkan metode-metode yang sesuai. Salah satu metode yang paling baik dan mudah dibahas di dalam tugas akhir ini yaitu uji regeneratif (uji hopkinson) yang dilaksanakan pada motor DC shunt untuk
1 BAB I
PENDAHULUAN I.1 Latar Belakang
Motor adalah mesin yang merubah energi listrik menjadi energi mekanis. Pada motor arus searah (motor DC) energi listrik yang diubah adalah energi arus searah yang berasal dari sumber tegangan listrik arus searah. Dimana sumber tegangan ini dihubungkan kepada rangkaian medan dan rangkaian jangkar dari motor tersebut.
Tentu motor DC memiliki suatu nilai efisiensi karena tidak mungkin seluruh energi listrik yang diterima oleh motor diubah menjadi energi mekanis, karena motor DC memiliki tahanan kumparan jangkar, tahanan kumparan medan, tahanan sikat dan kontak sikat, koefisien gesek antara sikat dengan komutator, poros rotor dengan bantalan roda, permukaan rotor dengan celah udara, sifat ferromagnetik bahan penyusun inti jangkar dan lain sebagainya, yang menyebabkan sejumlah energi terbuang ataupun diserap oleh motor selama proses pengkonversian energi tersebut.
2 I.2. Tujuan Penulisan dan Manfaat Penulisan
Tujuan penulisan tugas akhir ini adalah :
1. Menjelaskan tentang penerapan uji regeneratif (uji hopkinson) dalam menentukan rugi-rugi motor DC shunt .
2. Menjelaskan tentang uji regeneratif (uji hopkinson) dalam menentukan efisiensi motor DC shunt.
Manfaat dari penulisan tugas akhir ini bagi penulis sendiri adalah memberikan pemahaman tentang bagaimana menerapkan uji regeneratif (uji hopkinson) untuk menentukan nilai rugi-rugi motor DC shunt dan menggunakan data hasil percobaan untuk menghitung efisiensi motor DC shunt tersebut. Selain itu juga memberikan semangat untuk menjadi peneliti di bidang kelistrikan di masa yang akan datang. Sedangkan bagi para pembaca, diharapkan semoga tugas akhir ini dapat menjadi sumbangan dalam memperkaya pengetahuan sehingga akan dapat memunculkan ide-ide yang baru dalam menemukan suatu metode untuk mengetahui ataupun meningkatkan nilai efisiensi dari suatu motor listrik.
I.3. Batasan Masalah
Untuk membatasi materi yang akan dibicarakan pada tugas akhir ini, maka penulis perlu membuat batasan cakupan masalah yang akan dibahas. Hal ini diperbuat supaya isi dan pembahasasn dari tugas akhir ini menjadi lebih terarah dan dapat mencapai hasil yang diharapkan. Adapun batasan masalah pada penulisan tugas akhir ini adalah:
1. Dalam percobaan ini, motor yang digunakan adalah motor DC penguatan shunt. 2. Tidak membahas generator arus searah secara terperinci.
3 I.4. Metode Penulisan
Metode yang digunakan dalam penulisan tugas akhir ini adalah: 1. Studi literatur
Penulis melakukan penulisan berdasarkan studi kepustakaan dan kajian dari buku-buku teks pendukung yang dapat menunjang penulisan tugas akhir ini.
2. Studi bimbingan
Penulis melakukan diskusi dan konsultasi dengan dosen pembimbing dan staf pengajar pada Departemen Teknik Elektro FT-USU lainnya mengenai masalah-masalah yang timbul selama penulisan tugas akhir ini berlangsung
3. Percobaan
Melakukan percobaan di Laboraturium Konversi Energi Elektrik Departemen Teknik Elektro FT-USU untuk mendapatkan data-data yang dibutuhkan selama penulisan tugas akhir ini.
1.5. Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut. BAB I. PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metode dan sistematika penulisan.
BAB II. MOTOR ARUS SEARAH
Bab ini menjelaskan tentang motor arus searah secara umum, konstruksi, prinsip kerja, ggl lawan pada motor arus searah, persamaan tegangan dan daya, torsi dan kecepatan motor arus searah, jenis-jenis motor DC, karakteristik motor DC shunt.
4 Bab ini menjelaskan tentang rugi-rugi di dalam motor DC serta efisiensinya. Kemudian akan diuraikan prinsip dasar uji regeneratif (uji Hopkinson) dalam pengujian rugi-rugi dan efisiensi motor DC shunt.
BAB IV. PENERAPAN UJI REGENERATIF (UJI HOPKINSON) PADA MOTOR DC SHUNT
Bab ini menjelaskan tentang penerapan uji regeneratif (uji hopkinson) pada motor DC shunt yaitu dengan melaksanakan percobaan pada motor DC shunt di Laboratorium Konversi Energi Listrik FT USU dan menghitung efisiensi motor tersebut. BAB V. KESIMPULAN DAN SARAN
5 BAB II
MOTOR ARUS SEARAH
II.1 Umum
Motor arus searah ialah suatu mesin listrik yang berfungsi mengubah energi listrik arus searah (listrik DC) menjadi energi gerak atau energi mekanik, dimana energi gerak tersebut berupa putaran rotor. Proses pengkonversian energi listrik menjadi energi mekanik tersebut berlangsung di dalam medan magnet.
Motor arus searah penguatan shunt ialah suatu motor arus searah dimana belitan medannya dihubungkan paralel dengan jangkarnya sehingga arus yang melalui belitan medan shunt ini tidak sama dengan arus yang mengalir pada jangkar. Dimana belitan medan shunt ini di design untuk menghasilkan tahanan yang tinggi, sehingga arus medan shunt relatif lebih kecil dibandingkan dengan arus jangkar.
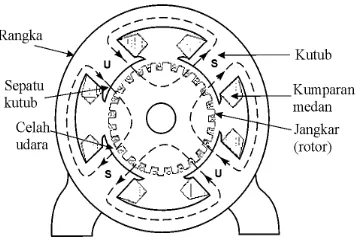
II.2. Konstruksi Motor Arus Searah
Gambar di bawah merupakan konstruksi dari motor arus searah.
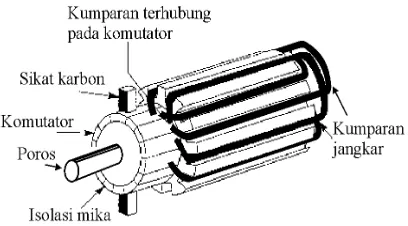
6 Gambar 2.2. Konstruksi motor arus searah bagian rotor
Keterangan dari gambar tersebut adalah: 1. Rangka atau gandar
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin. Untuk itu rangka harus dirancang memiliki kekuatan mekanis yang tinggi untuk mendukung komponen-komponen mesin tersebut.
Rangka juga berfungsi sebagai tempat mengalirkan fluksi magnet yang dihasilkan oleh kutub-kutub medan. Rangka dibuat dengan menggunakan bahan ferromagnetik yang memiliki permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai bagian dari rangkain magnet.
2. Kutub Medan
7 Inti kutub terbuat dari laminasi pelat-pelat baja yang terisolasi satu sama lain. Sepatu kutub dilaminasi dan dibaut ke inti kutub. Maka kutub medan (inti kutub dan sepatu kutub) direkatkan bersama-sama kemudian dibaut pada rangka. Pada inti kutub ini dibelitkan kumparan medan yang terbuat dari kawat tembaga yang berfungsi untuk menghasilkan fluksi magnetik.
3. Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Sikat memegang peranan penting untuk terjadinya komutasi. Sikat-sikat terbuat dari bahan karbon dengan tingkat kekerasan yang bermacam-macam dan dalam beberapa hal dibuat dari campuran karbon dan logam tembaga. Sikat harus lebih lunak daripada segmen-segmen komutator supaya gesekan yang terjadi antara segmen-segmen komutator dan sikat tidak mengakibatkan ausnya komutator.
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Dimana konduktor tersebut terbuat dari kawat tembaga yang berbentuk bulat ataupun persegi. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama dibentuk dari kumparan pada setiap kutub.
5. Jangkar
8 6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi. Pada motor DC penguatan kompon panjang kumparan medan serinya diserikan terhadap kumparan jangkar, sedangkan pada motor DC penguatan kompon pendek kumparan medan serinya diparalel terhadap kumparan jangkar. Jenis-jenis konstruksi kumparan jangkar pada rotor ada tiga macam yaitu:
1. Kumparan jerat (lap winding)
2. Kumparan gelombang (wave winding) 3. Kumparan zig – zag (frog-leg winding) 7. Komutator
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut komutator dan sikat. Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit ke dalam silinder yang terpasang pada poros. Dimana tiap-tiap lempengan atau segmen-segmen komutator terisolasi dengan baik antara satu sama lainnya. Bahan isolasi yang digunakan pada komutator adalah mika.
Agar dihasilkan tegangan arus searah yang konstan, maka komutator yang digunakan hendaknya dalam jumlah yang besar.
8. Celah Udara
9 II.3 Prinsip Kerja Motor Arus Searah Penguatan Shunt
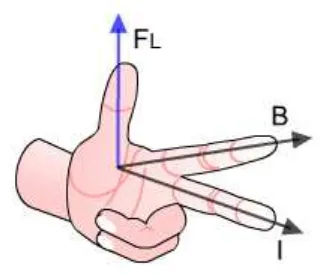
Prinsip dasar dari motor arus searah adalah kalau sebuah kawat berarus diletakkan antara kutub magnet (U – S), maka pada kawat itu akan bekerja suatu gaya yang menggerakkan kawat itu. Besarnya gaya tersebut adalah :
F = B i l Sin θ Newton ...(2.1) di mana :
B = kerapatan fluks magnet dalam satuan Weber i = arus listrik yang mengalir dalam satuan Ampere l = panjang penghantar dalam satuan meter
Sin θ = sudut antara i dan B
Jika vektor arus listrik ( i ) tegak lurus dengan arah kerapatan fluks magnet (B), yang membentuk sudut 90°, sehingga Sin θ = 0, maka besar gaya yang dihasilkan oleh arus yang mengalir pada kawat yang ditempatkan dalam suatu medan magnet adalah:
F = B i l Newton
10 Gambar 2.3 Kaidah tangan kiri Fleming
Kalau sebatang kawat terdapat di antara kutub U – S dengan garis-garis gaya yang homogen, sedangkan di dalam kawat ini mengalir arus listrik yang arahnya menjauhi kita, maka di sebelah kanan kawat garis gaya kutub magnet dan garis gaya arus listrik sama arahnya dan di sebelah kiri kawat arahnya berlawanan, sehingga bentuk medan magnet akan berubah seperti Gambar 2.4. Kawat mendapat gaya yang arahnya searah dengan F.
Gambar 2.4. Perubahan garis gaya di sekitar kawat berarus
Kalau sebuah belitan terletak di dalam medan magnet yang homogen, maka karena kedua sisi belitan itu mempunyai arus yang arahnya berlawanan, sehingga arah gerakan seperti ditunjukkan pada Gambar 2.5 dan 2.6.
11 Gambar 2.5. Belitan berarus listrik terletak dalam medan magnet
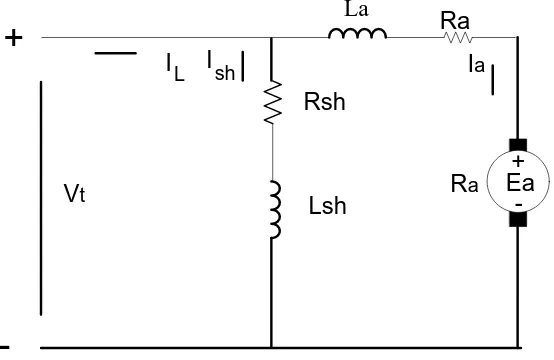
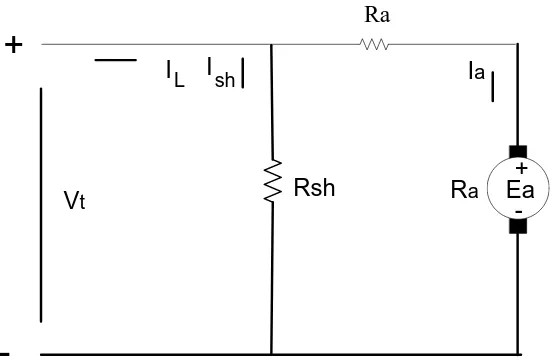
Gambar 2.6. Arah putaran pada kumparan berarus yang terletak dalam medan magnet II.4 Rangkaian Ekivalen Motor Arus Searah Penguatan Shunt
Ea
-+
-Vt Ra
Ia
IL I
sh
Lsh
La
Ra
Rsh
+
Gambar 2.7. Rangkaian Ekivalen Motor DC Shunt
12 Ea
-+
-Vt Ra
Ia
IL Ish
Ra
+ Rsh
Gambar 2.8 Rangkaian Ekivalen Motor DC Shunt
II.5 GGL Balik Pada Motor Arus Searah Penguatan Shunt
Ketika jangkar motor DC berputar di bawah pengaruh torsi penggerak, konduktor jangkar bergerak di dalam medan magnet dan akan menghasilkan tegangan induksi di dalamnya seperti halnya pada generator. GGL induksi bekerja pada arah yang berlawanan dengan tegangan terminal Vt (sesuai dengan bunyi Hukum Lenz) dan dikenal sebagai GGL lawan atau GGL balik Ea.
Ea = Dimana : p = jumlah kutub
= fluks per kutub dalam weber Z = jumlah total konduktor jangkar
N = kecepatan putaran rotor dalam putaran per detik A= cabang paralel
13 Dengan memperhatikan Gambar 2.7, ketika tegangan DC sebesar Vt diberikan pada terminal motor, suatu medan magnet dihasilkan dan konduktor jangkar disuplai dengan arus searah. Dengan demikian, torsi penggerak akan bekerja pada jangkar yang menyebabkan jangkar mulai berputar. Karena jangkar berputar, GGL balik Ea diinduksikan berlawanan dengan tegangan terminal. Tegangan terminal harus memaksa arus mengalir melalui jangkar melawan GGL balik Ea. Kerja listrik yang dilakukan untuk mengatasi dan menyebabkan arus mengalir melawan Ea dikonversikan ke dalam energi mekanik yang dibangkitkan di dalam jangkar. Dengan demikian, pengkonversian energi di dalam motor DC hanya mungkin jika GGL balik dihasilkan.
Drop tegangan pada kumparan jangkar = Vt – Ea.
Jika Ra adalah tahanan kumparan jangkar, maka
a a t a
R E V
I = −
Karena V dan Ra nilainya selalu tetap, nilai Ea akan menentukan arus yang dipikul oleh motor. Jika kecepatan motor tinggi, maka GGL balik Ea menjadi besar dan motor akan memikul arus jangkar yang lebih kecil begitu juga sebaliknya.
Adanya GGL balik menjadikan motor DC sebagai mesin dengan pengaturan sendiri (self-regulating), yaitu menjadikan motor memikul arus jangkar sesuai dengan yang dibutuhkan untuk membangkitkan torsi beban.
Arus jangkar,
a a t a
R E V
I = −
(i) Ketika motor berjalan pada kondisi tanpa beban, torsi yang kecil dibutuhkan untuk mengatasi rugi-rugi gesek dan angin. Dengan demikian, arus jangkar Ia juga kecil dan GGL balik besarnya hampir sama dengan tegangan terminal.
14 balik menyebabkab arus yang besar mengalir melalui jangkar dan arus yang besar ini juga meningkatkan torsi penggerak. Maka, torsi penggerak meningkat seiring dengan menurunnya kecepatan motor. Penurunan kecepatan motor akan berhenti ketika arus jangkar sudah cukup untuk menghasilkan torsi yang dibutuhkan oleh beban.
(iii) Jika beban motor dikurangi, torsi penggerak sesaat melebihi dari yang dibutuhkan sehingga jangkar mengalami percepatan. Karena kecepatan jangkar meningkat, GGL balik juga akan meningkat dan menyebabkan arus jangkar Ia berkurang. Motor akan berhenti dari percepatannya jika arus jangkar sudah cukup untuk menghasilkan torsi yang dibutuhkan oleh beban. Dengan demikian, GGL balik di dalam motor DC mengatur aliran arus jangkar, yang secara otomatis merubah besaran arus jangkar untuk memenuhi kebutuhan beban.
II.6 Persamaan Tegangan dan Daya Motor Arus Searah Penguatan Shunt Dari gambar rangkaian ekivalen motor DC shunt di atas (Gambar 2.8) diketahui : Vt = tegangan terminal Ra = tahanan jangkar
Ea = GGL balik Ia = arus jangkar
Karena GGL balik Ea bekerja dalam arah yang berlawanan dengan tegangan terminal V, maka tegangan pada rangkaian jangkar adalah V – Ea. Arus jangkar Ia diperoleh dari :
a a t a
R E V
I = − ..………...…….(2.2)
atau
Vt = Ea + IaRa ...(2.3)
Persamaan ini dikenal sebagai persamaan tegangan motor DC penguatan shunt.
Jika persamaan di atas dikalikan dengan Ia, kita peroleh :
15 Persamaan ini dikenal dengan persamaan daya motor DC penguatan shunt. Dimana,
Vt Ia = daya listrik yang diberikan ke jangkar (daya masukan jangkar) Ea Ia = daya yang dibangkitkan oleh jangkar (daya keluaran jangkar) Ia2Ra = daya listrik yang terbuang di dalam jangkar (rugi tembaga jangkar)
Dengan demikian diketahui bahwa dari keluaran daya masukan jangkar sebagian kecil terbuang sebagai rugi tembaga jangkar (Ia2Ra) dan sebagian lainnya (EaIa) dikonversikan menjadi energi mekanis di dalam jangkar.
II.7 Pengaturan Kecepatan Motor DC Penguatan Shunt
Sebagaimana telah diketahui bahwa di dalam motor DC berlaku persamaan : Ea = Vt – IaRa………..……...(2.5)
Dimana Ea = A 60 n Z PΦ ………...(2.6) Sehingga A 60 n Z PΦ
= Vt – IaRa………...…….……(2.7)
Atau n =
(
)
PZA R I Vt a a 60
Φ
− ...(2.8)
Atau n = K
(
)
Φ − a a
t IR
V
di mana K = PZ
A 60
...(2.9)
Tetapi Vt – IaRa = Ea
Maka n = K
Φ
a
E
...(2.10)
Atau n ~
Φ
a
E
Dimana : T = torsi (Newton – meter)
K = konstanta (bergantung pada ukuran fisik motor)
16
6 (a) 6 (b)
a
I = arus jangkar (Ampere) P = jumlah kutub
Z = jumlah konduktor A = cabang paralel
Dengan demikian di dalam motor DC , kecepatan berbanding lurus dengan GGL balik Ea dan berbanding terbalik dengan fluks per kutub Φ.
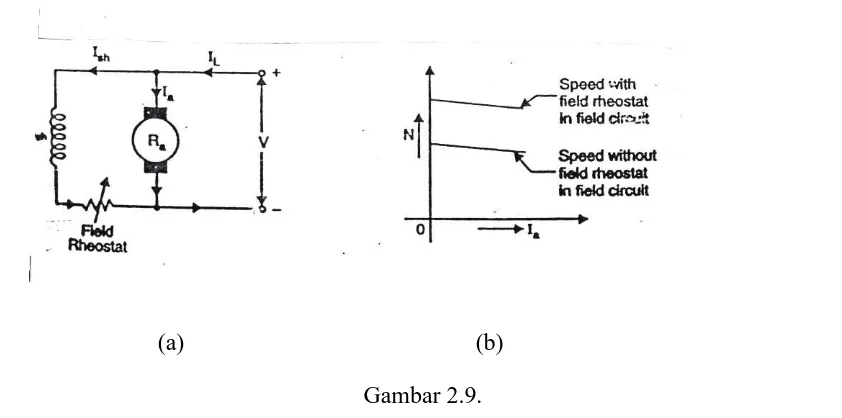
Kecepatan motor DC shunt dapat diubah-ubah dengan : 1. Metode Pengaturan Flux
Metode ini didasarkan atas kenyataan bahwa dengan mengubah flux Φ, kecepatan motor (n ~ 1/ Φ) dapat diubah, sehingga metode ini disebut metode pengaturan flux. Di
dalam metode ini, tahanan variabel (rheostat) dihubungkan secara seri dengan belitan medan shunt seperti terlihat pada gambar 2.9(a) dibawah ini.
(a) (b)
Gambar 2.9.
17
(a) (b)
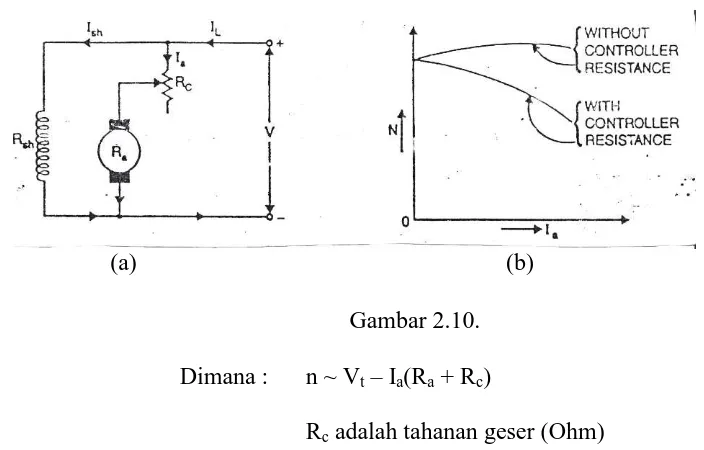
2. Metode Pengaturan Tahanan Jangkar
Metode ini berdasarkan bahwa dengan mengubah tegangan dapat mempengaruhi besar kecilnya kecepatan motor. Hal ini dilakukan dengan memasukkan tahanan variabel Rc (tahanan geser) secara seri dengan tahanan jangkar seperti ditunjukkan pada gambar 2.10(a) di bawah ini.
Gambar 2.10. Dimana : n ~ Vt – Ia(Ra + Rc)
Rc adalah tahanan geser (Ohm)
Dikarenakan terjadinya penurunan tegangan pada tahanan geser, maka GGL balik Ea menjadi berkurang. Ketika n ~ Ea, kecepatan motorpun akan berkurang. Kecepatan maksimum dapat diperoleh ketika Rc = 0.
Oleh karena itu, metode ini hanya untuk kecepatan di bawah kecepatan normalnya {lihat gambar 2.10(b)}.
3. Metode Pengaturan Tegangan
18 diperbolehkan untuk kapasitas motor yang besar dimana efesiensi motor sangat perlu diperhatikan.
Pengaturan tegangan
Dalam metode ini, medan shunt motor dihubungkan langsung secara permanen ke sumber tegangan tertentu, sedangkan jangkar dihubungkan langsung pada beberapa tegangan yang berbeda melalui sebuah switchgear. Dengan cara ini, tegangan yang akan diberikan pada jangkar dapat diubah-ubah. Kecepatan akan sebanding dengan tegangan yang diberikan pada jangkar tersebut. Kecepatan diubah-ubah dengan sebuah pengaturan medan shunt.
II.8 Karakteristik Motor Arus Searah Shunt
Gambar 2.11 (a) menunjukkan rangkaian listrik dari suatu motor DC shunt. Arus medan Ish besarnya konstan karena kumparan medan langsung terhubung dengan tegangan sumber Vt yang dianggap konstan. Oleh karena itu fluksi di dalam motor shunt hampir dapat dikatakan konstan.
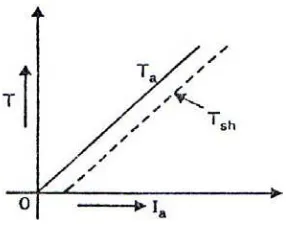
Gambar 2.11. Karakteristik Ta/Ia (i) Karakteristik Ta/Ia.
19 Karena motor beroperasi dari suatu tegangan sumber yang konstan, fluksi Φ juga konstan (dengan mengabaikan reaksi jangkar). Maka,
Ta ~ Ia
Dengan demikian karakteristik Ta/Ia motor DC shunt merupakan garis lurus yang melalui titik asal seperti ditunjukkan pada Gambar 2.11(b). Torsi poros (Tsh) kurang dibandingkan Ta dan ditunjukkan oleh garis putus-putus. Jelas terlihat pada kurva bahwa arus yang sangat besar dibutuhkan untuk menstart beban yang berat. Oleh karena itu, motor DC shunt tidak boleh distart dalam keadaan berbeban berat.
(ii)Karakteristik n/Ia
Kecepatan motor DC diberikan dengan Persamaan (2.9), sehingga diperoleh,
n ~
Φ
E
Fluksi Φ dan GGL lawan Ea di dalam motor DC shunt hampir konstan di bawah kondisi normal. Dengan demikian, kecepatan motor DC shunt selalu konstan walaupun arus jangkar berubah-ubah nilainya. Dengan kata lain, ketika beban bertambah, Ea (= Vt - IaRa) dan Φ berkurang karena drop tahanan jangkar dan reaksi jangkar. Bagaimanapun, Ea berkurang lebih sedikit daripada Φ sehingga dengan demikian kecepatan motor menurun sedikit dengan
pertambahan beban (garis AC) seperti terlihat pada Gambar 2.12 (a).
(iii) Karakteristik n/Ta.
20
(a) (b)
Gambar2.12 (a) Kurva Karakteristik n/Ia dan (b) Karakteristik n/Ta
Kesimpulan : Berikut dua buah kesimpulan yang penting yang diperoleh dari karakteristik di atas, yaitu :
(i) Terdapat sedikit penurunan kecepatan motor DC shunt dari kondisi tanpa beban sampai beban penuh. Dengan demikian, dapat dianggap sebagai motor kecepatan konstan.
21 BAB III
UJI REGENERATIF (UJI HOPKINSON) DALAM MENENTUKAN RUGI-RUGI DAN EFISIENSI MOTOR DC SHUNT
III.1. Umum
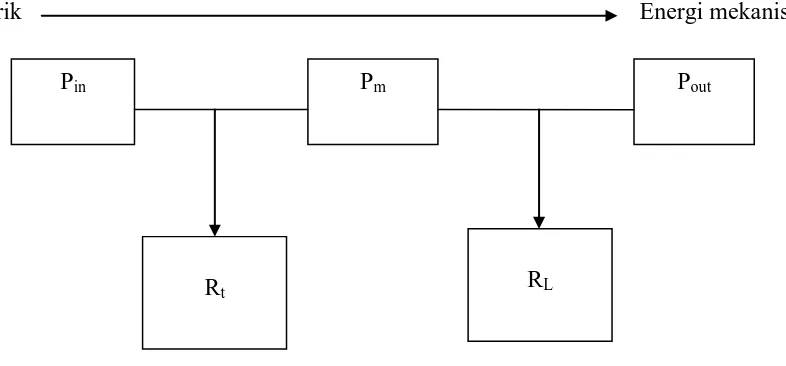
Berikut ini proses pengkonversian energi pada motor DC shunt dalam diagram aliran daya di bawah ini :
Energi listrik Energi mekanis
Gambar 3.1. Diagram aliran daya pada motor arus searah Keterangan: Pin = daya input
Pm = daya mekanis yang dibangkitkan di dalam jangkar Pout=daya output motor
Rt = rugi-rugi tembaga,rugi-rugi inti,gesek dan angin RL = rugi-rugi besi dan mekanis
Pin Pm Pout
22 Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam persamaannya dinyatakan dengan :
∑ Rugi-rugi = Daya masukan – Daya keluaran………(3.1)
III. 2. Jenis Rugi-Rugi Di Dalam Motor Arus Searah Adapun jenis rugi-rugi yang ada yaitu: 1. Rugi-Rugi Mekanis
Rugi-rugi mekanis di dalam motor DC merupakan rugi-rugi yang berhubungan dengan efek-efek mekanis. Ada dua bentuk dasar rugi-rugi mekanis di dalam motor DC yaitu gesekan dan angin.
Rugi-rugi gesekan adalah rugi-rugi yang disebabkan oleh pergesekan antara permukaan bagian-bagian yang berputar dengan bagian-bagian yang diam dari motor, diantaranya gesekan bearing atau bantalan peluru dengan rumah bearing atau dengan as rotor. Juga gesekan antara permukaan sikat dengan komutator. Karena adanya suatu nilai koefisien gesek antara permukaan bagian-bagian tersebut, walaupun kecil, diperlukan gaya untuk mengimbangi gaya lawan akibat koefisien gesek tersebut jika ingin menggerakkan rotor motor DC tersebut.
Selain itu, panas yang ditimbulkan akibat pergesekan antara permukaan tersebut jika motor berputar juga merupakan rugi-rugi yang perlu dipertimbangkan. Oleh karena itu diperlukan usaha untuk memperkecil rugi-rugi gesek tersebut dengan membuat permukaan sikat yang halus serta penggunaan bearing dengan minyak pendingin yang dipompakan untuk motor DC yang besar.
23 Baik itu pergesekan antara permukaan rotor dengan udara pada celah udara di dalam motor ataupun gesekan udara dengan kipas pendingin yang dipasangkan pada rotor di dalam motor. Rugi-rugi angin ini bervariasi tergantung pada kecepatan rotasi motor tersebut.
2. Rugi-Rugi Tembaga (copper losses)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam kumparan medan dan kumparan jangkar motor. Karena kawat tembaga kedua kumparan tersebut memiliki nilai resistansi Rf dan Ra, maka jika mengalir arus DC sebesar If dan Ia akan menyebabkan kerugian daya yang dihitung dengan persamaan :
Pa = Ia2Ra………...………...….……(3.2) dan
Pf = If2Rf………..…..……....……(3.3) Di mana : Pa = rugi tembaga kumparan jangkar
Pf = rugi tembaga kumparan medan
Ia = arus jangkar Ra = resistansi jangkar If = arus medan Rf = resistansi medan
Besarnya resistansi kumparan medan dan kumparan jangkar dapat diukur langsung dengan ohmmeter atau dengan metode volt-amperemeter. Di mana dalam pengukuran resistansi kumparan medan dengan metode volt-amperemeter dilakukan dengan memberikan tegangan DC pada terminal kumparan medan sedemikian rupa sehingga mengalir arus medan sebesar arus nominalnya. Nilai arus dan tegangan diukur sehingga diperoleh nilai resistansi kumparan medan sebesar Rf = Vfdc/Ifdc.
24 sikat-sikat yang polaritasnya berbeda sedemikian rupa sehingga mengalir arus jangkar sebesar arus beban penuhnya dengan jangkar dalam kondisi ditahan/diblok. Nilai tegangan dan arus diukur sehingga diperoleh nilai resistansi jangkar sebesar Ra = Vadc/Iadc.
Namun perlu diperhatikan bahwa di dalam perhitungan rugi-rugi tembaga jangkar, nilai resistansi jangkar yang dimasukkan ke dalam perhitungan biasanya sudah mencakup nilai resistansi sikat dan tahanan kontak sikat. Sehingga dalam pengukuran resistansi jangkar dengan ohmmeter ataupun dengan metode volt-amperemeter biasanya tegangan DC diberikan langsung pada terminal jangkar yang ditarik dari sikat-sikatnya.
3. Rugi-Rugi Sikat
Jika kumparan jangkar motor DC dialiri arus listrik DC maka sikat-sikatnya juga akan dialiri arus yang sama. Karena sikat memiliki nilai resistansi sikat dan juga tahanan kontak antara permukaan sikat dengan komutator maka terdapat rugi jatuh tegangan pada sikat yang dinyatakan dengan Vbd. Jatuh tegangan sikat ini menyebabkan timbulnya rugi-rugi daya sebesar :
Pbd = Vbd.Ia………...……….(3.4) Dimana : Pbd = rugi daya akibat jatuh tegangan sikat Ia = arus jangkar
Vbd = jatuh tegangan sikat
Besarnya nilai jatuh tegangan sikat-sikat pada motor DC hampir konstan dalam rentang arus jangkar yang besar.
4. Rugi-Rugi Inti
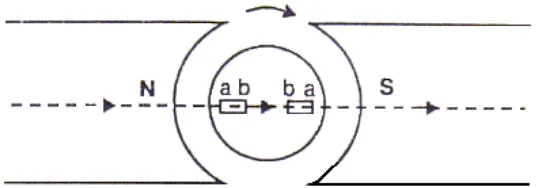
Rugi-rugi inti terjadi di dalam jangkar motor DC yang disebabkan oleh perputaran jangkar di dalam medan magnet kutub-kutubnya. Ada dua jenis rugi-rugi inti yaitu (1) rugi hysteresis dan (2) rugi arus pusar.
25 Rugi hysteresis terjadi di dalam jangkar mesin DC karena setiap bagian jangkar dipengaruhi oleh pembalikan medan magnetik sebagaimana bagian tersebut lewat di bawah kutub-kutub yang berurut.
Gambar 3.2. Perputaran jangkar di dalam motor dua kutub
Gambar 3.2 menunjukkan jangkar yang berputar di dalam motor dua kutub. Dengan menganggap ab sebagai potongan kecil dari jangkar. Ketika potongan ab berada di bawah kutub N, garis-garis magnetik lewat dari a ke b. Setengah perputaran selanjutnya, dari potongan besi yang sama berada di bawah kutub S dan garis-garis magnetik lewat dari b ke a sehingga sifat magnet di dalam besi dibalik.
Untuk dapat membalik molekul-molekul magnet secara terus menerus di dalam inti jangkar, sejumlah daya diserap sehingga menyebabkan pemanasan pada inti jangkar. Daya yang diserap dan berubah menjadi panas tersebut dianggap sebagai rugi-rugi di dalam inti jangkar dan disebut sebagai rugi hysteresis. Untuk menentukan besarnya rugi hysteresis di dalam inti jangkar digunakan persamaan Steinmentz yaitu :
Ph= ηB1max,6 fV Watt..………..……….……….(3.5)
Dimana : Ph = rugi hysteresis
Bmax = rapat fluks maksimum di dalam jangkar F = frekuensi pembalikan magnetik
= 120
P n
dimana n dalam rpm dan P = jumlah kutub
26 η = koefisien hysteresis Steinmentz
Untuk dapat mengurangi rugi-rugi hysteresis ini di dalam motor DC, inti jangkar di buat dari bahan ferromagnetik yang memiliki koefisien hysteresis Steinmentz yang kecil seperti baja silikon.
2). Rugi Arus Pusar
Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor jangkar, ada juga tegangan yang diinduksikan di dalam inti jangkar. Tegangan ini menghasilkan arus yang bersirkulasi di dalam inti jangkar seperti yang ditunjukkan dalam Gambar 3.3. Ini disebut sebagai arus pusar (eddy current) dan daya yang hilang karena alirannya disebut dengan rugi arus pusar.
Rugi arus pusar berlaku sebagai panas yang dapat menaikkan temperatur motor dan menurunkan efisiensinya. Jika suatu inti besi padat digunakan sebagai inti jangkar, resistansi terhadap arus pusar ini akan menjadi kecil karena lebarnya luas penampang inti. Akibatnya, nilai arus pusar dan juga rugi arus pusarnya akan menjadi besar. Besarnya nilai arus pusar dapat dikurangi dengan membuat resistansi inti sebesar mungkin secara praktisnya.
[image:34.595.110.453.498.618.2]
Gambar 3.3. (a) Arus pusar di dalam inti jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi
Besarnya rugi arus pusar dapat dihitung dengan menggunakan persamaan : Pe = KeB2maxf
2
t2V Watt………....………..….(3.6)
Dimana : Pe = Rugi arus pusar
27 Ke = konstanta arus pusar
Bmax = rapat fluks maksimum dalam Wb/m2 f = frekuensi pembalikan magnetik dalam Hz t = ketebalan laminasi dalam m
V = volume inti dalam m3
Perlu diingat bahwa rugi arus pusar bergantung pada kuadrat ketebalan laminasi. Karena alasan inilah, ketebalan laminasi harus dijaga sekecil mungkin.
5. Rugi-Rugi Beban Stray
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan oleh arus pusar di dalam tembaga dan rugi-rugi inti tambahan di dalam besi, yang timbul karena pendistorsian fluks magnetik oleh arus beban (tidak termasuk yang disebabkan oleh jatuh tegangan IR) dan rugi-rugi hubung singkat komutasi.
Rugi-rugi beban stray ini tidak dapat dikategorikan ke dalam tipe rugi-rugi yang disebutkan di atas. Di dalam perhitungan rugi-rugi motor DC, besarnya rugi-rugi beban stray dinyatakan sebesar ± 1% dari beban penuh.
Rugi-rugi di dalam motor DC di atas juga dapat dikelompokkan menjadi dua kelompok yaitu :
1. Rugi-rugi Konstan 2. Rugi-rugi Variabel
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor DC yang nilainya selalu tetap, tidak tergantung pada arus pembebanan.
28 b. Rugi-rugi mekanis yaitu rugi-rugi gesek dan angin
c. Rugi-rugi tembaga medan shunt.
2. Rugi-rugi variabel yaitu rugi-rugi di dalam motor DC yang nilainya bervariasi terhadap arus pembebanan.
Yang termasuk ke dalam kelompok rugi-rugi ini adalah : a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra)
b. Rugi-rugi tenbaga kumparan medan seri (Ia2Rse) c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam motor DC adalah :
Σ Rugi – Rugi = Rugi Konstan + Rugi Variabel
III.3. Efisiensi Motor Arus Searah
Efisiensi motor DC merupakan perbandingan antara daya keluaran dengan daya masukan yang dinyatakan dalam persen (%) dari motor DC tersebut. Ini dinyatakan dengan persamaan :
Efisiensi, η = x 100% P
P
in out
………..(3.7)
dimana, Pin = daya masukan Pout = daya keluaran
Efisiensi yang dinyatakan dalam persamaan di atas disebut pula sebagai efisiensi komersial atau efisiensi keseluruhan. Selain itu dalam motor DC dikenal juga dua macam efisiensi lainnya, yaitu :
1. Efisiensi Mekanis
ηm = 100x % P
P
konversi out
………...………(3.8)
29 Pkonversi = Ea x Ia
Pkonversi adalah daya yang dibangkitkan pada kumparan jangkar. 2. Efisiensi Elektris
ηe =
in konversi
P P
x 100%...(3.9)
di mana : Pin = V x IL
Dari persamaan-persamaan di atas terlihat bahwa :
η = ηm x ηe………..…..………(3.10)
Pembagian jenis-jenis efisiensi di atas ditentukan berdasarkan diagram aliran daya.
III.4. Metode Pengujian Motor Arus Searah Dalam Menentukan Rugi-rugi dan Efisiensi
Ada beberapa metode pengujian yang dapat dilaksanakan, yaitu : 1. Uji Tanpa Beban (Uji Swinburne)
Dalam metode ini mesin (motor dan generator) bekerja tanpa beban dan rugi-rugi dapat ditentukan. Ketika rugi-rugi mesin diketahui maka efisiensi mesin dapat dicari. Metode ini dapat diaplikasikan untuk mesin dengan flux yang konstan pada semua beban contohnya adalah mesin penguatan shunt dan mesin penguatan kompon. Metode ini terdiri dari dua langkah :
a. Penentuan tahanan panas belitan motor DC.
b. Penentuan rugi-rugi konstan motor DC dengan menjalankan motor dalam keadaan tanpa beban lalu kecepatan motor diatur pada kecepatan nominalnya dengan mengatur arus medan motor. Dengan mengetahui rugi-rugi tembaga jangkar dan daya input maka nilai rugi-rugi konstan motor dapat ditentukan.
30 out-put dari motor akan memutar generator dan daya output dari generator akan digunakan untuk mensuplai daya input ke motor. Daya listrik dari generator dan daya dari suplai DC akan diumpankan ke motor. Daya listrik yang diberikan ke motor tersebut sebagian besar akan dikonversikan menjadi daya mekanis dan sisanya akan menjadi rugi-rugi motor. Daya mekanis tersebut akan disuplaikan ke generator dan daya listrik dari generator akan disuplaikan ke motor kecuali beberapa daya yang terbuang sebagai rugi-rugi dalam generator. 3. Pengujian Retardasi, yaitu dengan menghitung momen inersia dan energi rotasi perlambatan rotor pada suatu slope penurunan kecepatan tertentu pada saat suplai tegangan motor dilepas dan motor mulai mengalami perlambatan karena energi rotasi jangkar digunakan untuk mengatasi rugi-rugi rotasi motor.
Metode-metode pengujian di atas adalah metode pengujian yang umum dilaksanakan untuk mengetahui rugi-rugi di dalam motor DC yang pada akhirnya dapat menentukan nilai efisiensi dari mesin yang diuji tersebut.
III.5. Uji Regeneratif (Uji Hopkinson) dalam Menentukan Rugi-rugi dan Efisiensi Motor DC Shunt
Metode ini merupakan metode yang paling baik dan sederhana untuk menentukan rugi-rugi dan efisiensi mesin DC yang beroperasi dengan kecepatan konstan, yaitu motor atau generator DC shunt. Dengan menjalankan metode ini, maka akan dapat diketahui rugi-rugi besi,tembaga jangkar dan mekanis (gesek dan angin) dari mesin yang diuji. Selanjutnya dengan mengetahui rugi-rugi tersebut pada saat berbeban, efisiensi mesin dapat dihitung pada saat pembebanan tersebut.
31 Uji ini hanya dilakukan pada mesin arus searah yang memiliki fluks konstan, yaitu motor arus searah shunt dan kompon. Namun pada percobaan ini akan menggunakan motor arus searah jenis shunt. Dari parameter-parameter yang ada hasil pembacaan instrument ukur dan parameter-parameter pasif mesin arus searah, dapat dicari besarnya efisiensi motor arus searah dan generator arus searah tersebut.
Rangkaian hubungan Hopkinson dapat dilihat pada gambar di bawah ini :
V
M
+
-I2 I2 I1 I1
V2
I4
I4
Ig
S
G
I3
I3
I2 I1
m
I
Dari Gambar (3.4) di atas, jika V adalah tegangan supply, maka : Daya Masukan Motor : V . (I1 + I2)
Daya Keluaran Generator : V . I1
Karena kedua mesin adalah identik (sama), maka kita dapat mengasumsikan bahwa rugi-rugi besi, rugi-rugi gesek dan rugi-rugi angin kedua mesin adalah juga sama. Dengan mengasumsikan hal tersebut maka akan didapat nilai rugi-rugi besi, angin, gesek.dan juga efisiensi dari masing-masing mesin.
Dari Gambar (3.4) di atas, daya yang diambil dari supply DC adalah V.I2 dan sebanding dengan total rugi-rugi motor dan generator.
[image:39.595.106.487.266.423.2]32 Jika kita mengurangi rugi-rugi jangkar,rugi-rugi tembaga kumparan jangkar dan rugi-rugi tembaga medan shunt kedua mesin dari V.I2 maka kita akan memperoleh rugi besi, rugi-rugi gesek dan rugi-rugi-rugi-rugi angin kedua mesin.
Sehingga dapat dituliskan bahwa rugi-rugi besi, rugi-rugi gesek dan rugi-rugi angin kedua mesin adalah sebagai berikut :
Wm&g = V.I2 – {( I1+I3 )2. Ra + ( I1+I2-I4 )2 . Ra + V.I3 + V.I4} ... (3.11) dimana : Ra = Tahanan jangkar masing-masing mesin
I3 = Arus medan generator I4 = Arus medan motor
(I1+I3)2. Ra = Rugi-rugi tembaga kumparan jangkar generator (I1+I2-I4)2 . Ra = Rugi-rugi tembaga kumparan jangkar pada motor
V.I3 = Rugi-rugi tembaga medan shunt generator V.I4 = Rugi-rugi tembaga medan shunt motor V.I2 = Tegangan suplai DC
Maka rugi-rugi besi, gesek dan angin masing-masing mesin adalah : Wm&g / 2
Dalam pengujian ini, rugi-rugi motor dan rugi-rugi generator dapat ditulis sebagai berikut : Total Rugi-Rugi Motor = (I1+I2-I4)2 . Ra + V.I4 + Wm&g / 2 ... (3.12)
Total Rugi-Rugi Generator = (I1+I3)2. Ra + V.I3 + Wm&g / 2 ... (3.13)
Dengan mengetahui nilai rugi-rugi motor dan generator yang diberikan pada persamaan (3.12) dan persamaan (3.13), maka efisiensi dari masing-masing mesin tersebut juga dapat ditentukan dengan cara sebagai berikut :
(
)
(
)
10033 BAB IV
PENERAPAN UJI REGENERATIF (UJI HOPKINSON) PADA MOTOR DC SHUNT IV.1. Umum
Dua (2) buah mesin DC yang identik dikopel secara mekanis dan dihubungkan secara paralel dengan sebuah supply DC. Dengan mengatur medan dari kedua mesin tersebut maka salah satu dari mesin akan beroperasi sebagai generator dan mesin yang lain akan beroperasi sebagai motor. Daya listrik dari generator dan daya listrik dari sebuah supply DC akan disuplaikan (diumpankan) ke motor. Daya listrik yang diberikan ke motor tersebut sebagian besar akan dikonversikan menjadi daya mekanis dan sisanya akan menjadi rugi-rugi motor. Daya mekanis yang dihasilkan motor tersebut akan disuplaikan (diumpankan) ke generator untuk memutar generator. Daya listrik dari generator akan disuplaikan (diumpankan) ke motor kecuali beberapa yang terbuang sebagai rugi-rugi dalam generator. Dengan demikian daya listrik yang diambil dari supply DC tersebut adalah merupakan jumlah rugi-rugi motor dan rugi-rugi generator, dan hal ini dapat diukur dengan menggunakan bantuan alat ukur (Voltmeter dan Ammeter).
IV.2. Peralatan yang digunakan dalam percobaan. Peralatan yang digunakan dalam pengujian ini terdiri dari : a. Mesin DC sebagai motor
TYP Gd 110/110 G-Mot Nr. 7983733 Tegangan nominal = 220 V
34 b. Mesin DC sebagai generator
TYP Gd 110/110 G-Mot Nr. 7983745 Tegangan nominal = 220 V
P = 1,2 KW IL =7,1 A Ish = 0,177 A n = 1400 rpm
c. Dua Buah Voltmeter DC
d. Empat Buah Ampere meter DC e. Satu Buah Rpm meter
f. Sepuluh Buah tahanan geser, masing-masing 25 ohm g. Satu buah Power supply
h. Dudukan mesin
i. Satu buah Kopel mesin
IV.3. Rangkaian Pengujian
[image:42.595.133.472.568.693.2]Pengujian Hopkinson yang dilakukan di Laboratorium Konversi Energi Listrik Fakultas Teknik USU dengan menggunakan rangkaian pengujian seperti yang terlihat pada Gambar di bawah ini.
V
M
+
-I2 I2 I1
I 1 V2 I4 Ig S A A J K V A
A I3
I2 I1
GA HB HB GA G I3 J K 4 I m I
35 IV.4. Prosedur Pengujian
Prosedur Pengujian Hopkinson ini adalah sebagai berikut: 1. Rangkaian percobaan disusun seperti gambar berikut :
V
M +
-I2 I2 I1
I
1
V2
I4
Ig
S
A
A
J
K
V
A
A I3
I2 I1
GA
HB
HB
GA G
I3
J
K 4
I
m
I
2. Untuk menjalankan motor, sumber tegangan DC yaitu Vs yang digunakan untuk mensuplai tegangan, dinaikkan perlahan-lahan sehingga motor mulai berputar.
3. Kemudian atur medan penguatnya sampai motor mencapai putaran nominalnya.
4. Setelah motor berputar pada putaran nominalnya, kemudian atur penguat medan generator sampai V2 terbaca NOL. ini berarti tegangan generator dan tegangan supplay sudah sama.
5. Pada saat V2 sudah terbaca NOL tutup saklar S, sehingga mulai saat itu motor dan generator arus searah akan bekerja secara paralel.
6. Setelah mesin telah bekerja paralel,atur arus medan motor (I4) dan generator (I3). Kemudian catat nilai-nilai I1,I2, I3, I4, dan nilai Vs.
[image:43.595.125.476.149.284.2]7. Lakukan hal yang sama dengan langkah 6, dimana nilai arus medan motor (I4) dan generator (I3) diubah-ubah (bervariasi). Percoban dilakukan lima kali.
36 IV.5. Data Pengujian
Adapun data yang diperoleh dari pengujian Hopkinson yang dilakukan adalah sebagai berikut :
Tabel I. Data Hasil Pengujian Hopkinson.
Tegangan Sumber (Vs) = 220 Volt (Konstan) Tahanan jangkar kedua mesin = 3,7 ohm
NO BEBAN Vs V2 I1 I2 I3 I4
Volt Volt Amp Amp Amp Amp
1 Beban pertama 220 0 0 0,65 0,17 0,15
2 Beban kedua 220 0 1 0,8 0,19 0,16
3 Beban ketiga 220 0 2,3 1,33 0,19 0,18 4 Beban keempat 220 0 3,7 1,73 0,18 0,17
5 Beban kelima 220 0 4,8 2,34 0,18 0,17
Beban pertama = 0 Watt Beban Kedua = 220 Watt Beban ketiga = 506 Watt Beban keempat = 814 Watt Beban kelima = 1056 Watt
IV.6. Analisa Data Pengujian
Dengan mengetahui data tersebut maka pada analisa data berikut akan diketahui besar nilai rugi-rugi dan efisiensi.
37 Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb:
Wm&g = V.I2 – {(I1+I3)2. Ra + (I1+I2-I4)2 . Ra + V.I3 + V.I4}
= 220.0,65 –{(0 + 0,17)2. 3,7+(0+0,65-0,15)2. 3,7+220.0,17+220 . 0,15} = 143 – ( 0,107 + 0,93 + 37,4 + 33 )
= 71,57 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 35,78 Watt Daya masuk ke motor = V . ( I1+I2 )
= 220 . ( 0 + 0,65 )
= 143 watt
Total rugi-rugi motor = (I1+I2-I4)2 . Ra + V.I4 + Wm
= ( 0+0,65-0,15)2 . 3,7 + 220 . 0,15 + 35,78 Maka, Wm = 69,71 Watt
Efisiensi motor ( ηm )
(
)
(
)
100%2 1 2 1 % 100 x I I V W I I V x masukan Daya Rugi Rugi masukan Daya m m + − + = − − =
∑
η =(
)
(
)
100% 0.5125143 71 , 69 143 % 100 65 . 0 0 220 71 , 69 65 . 0 0 220 = − = + −
+ x x
= 0.5125×100% =51.25%
Daya keluaran generator = V . I1 = 220 . 0
= 0 Watt
- Total rugi-rugi generator = (I1+I3)2. Ra + V.I3 + W/2
= (0 + 0.17)2. 3,7 + 220.0.17 + 35,78 ) = 0,1069 + 37,4 + 35,78
38 b.Pada Beban Kedua
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V.I2 – {(I1+I3)2. Ra + (I1+I2-I4)2 . Ra + V.I3 + V.I4}
= 220.0,8 –{(1+0,19)2 . 3,7 + (1+0,8-0,16)2 . 3,7 + 220 . 0,19 + 220 . 0,16} = 176 – ( 5,24 + 9,95 + 41,8 + 35,2 )
= 83,8 Watt
Maka rugi-rugi besi, gesek dan angin pada motor adalah : Wm&g /2 = 41,90 Watt Daya masuk ke motor = V . ( I1+I2 )
= 220 . ( 1 + 0,8 )
= 396 Watt
Total rugi-rugi motor = (I1+I2-I4)2 . Ra + V.I4 + Wm
= ( 1+0,8-0,16)2 . 3,7 + 220 . 0,16 + 41,9 ) = 9,95 + 35,2 + 41,9
Maka, Wm = 87,05 Watt
Efisiensi motor ( ηm )
(
)
(
)
100%2 1 2 1 % 100 x I I V W I I V x masukan Daya Rugi Rugi masukan Daya m m + − + = − − =
∑
η =(
)
(
)
100% 0,78396 05 , 87 396 % 100 8 . 0 1 220 05 , 87 8 . 0 1 220 = − = + −
+ x x
= 0.78×100% =78%
- Daya keluaran generator = V . I1 = 220 . 1
= 220 Watt
- Total rugi-rugi generator = (I1+I3)2. Ra + V.I3 + W/2
39 = 5,24 + 41,8 + 41,90
= 88,94 Watt - Jadi,Wg = 88,94 Watt
Efisiensi Generator % 100 3 1 % 100 x W V VI x W keluaran Daya keluaran Daya g g g + = + = η
= 100% 0.7121
94 , 308 220 % 100 94 , 88 1 220 1 220 = = +
× × x x
= 0.7121×100% = 71.21%
c.Pada Beban Ketiga
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V.I2 – {(I1+I3)2. Ra + (I1+I2-I4)2 . Ra + V.I3 + V.I4}
= 220.1,33 –{(2,3+0,19)2 .3,7+(2,3+1,33-0,17)2 .3,7+220.0,19+220.0,17} = 292,6– ( 22,94 + 44,29 + 41,8+ 37,4 )
= 146,16 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah :Wm&g /2 = 73,08 Watt
Daya masuk ke motor = V . ( I1+I2 )
= 220 . ( 2,3 + 1,33 )
= 798,6 Watt
Total rugi-rugi motor = (I1+I2-I4)2 . Ra + V.I4 + Wm
40 = 44,29 + 37,4 + 72,175
Maka, Wm = 153,865 Watt
Efisiensi motor ( ηm )
(
)
(
)
100%2 1 2 1 % 100 x I I V W I I V x masukan Daya Rugi Rugi masukan Daya m m + − + = − − =
∑
η =(
)
(
)
100% 0,80736 , 798 865 , 153 6 , 798 % 100 33 , 1 3 , 2 220 865 , 153 33 , 1 3 , 2 220 = − = +−
+ x x
= 0.8073×100% = 80,73%
- Daya keluaran generator = V . I1 = 220 . 2,3
= 506 Watt
- Total rugi-rugi generator = (I1+I3)2. Ra + V.I3 + W/2
= (2,3 + 0.19)2. 3,7 + 220.0.19 + 73,08 ) = 22,94 + 41,8 + 73,08
= 137,82 Watt - Jadi,Wg = 137,82 Watt
Efisiensi Generator % 100 1 1 % 100 x W VI VI x W keluaran Daya keluaran Daya g g g + = + = η
= 100% 0.7859
82 , 643 506 % 100 82 , 137 3 , 2 220 3 , 2 220 = = +
× × x x
41 d.Pada Beban Keempat
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V.I2 – {(I1+I3)2. Ra + (I1+I2-I4)2 . Ra + V.I3 + V.I4}
= 220.1,73 –{(3,7+0,19)2 .3,7+(3,7+1,73-0,18)2 .3,7+220.0,19+220.0,18} = 380,6– ( 55,99 + 101,98 + 41,8+ 39,6 )
= 136,9625 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 70,615 Watt Daya masuk ke motor = V . ( I1+I2 )
= 220 . ( 3,7 + 1,73 )
= 1194,6 Watt
Total rugi-rugi motor = (I1+I2-I4)2 . Ra + V.I4 + Wm
= ( 3,7+1,73-0,18)2 . 3,7 + 220 . 0,18 + 70,615 ) = 101,98 + 39,6 + 70,615
Maka, Wm = 212,195 Watt
Efisiensi motor ( ηm )
(
)
(
)
100%2 1 2 1 % 100 x I I V W I I V x masukan Daya Rugi Rugi masukan Daya m m + − + = − − =
∑
η =(
)
(
)
100% 0,82246 , 1194 195 , 212 6 , 1194 % 100 73 , 1 7 , 3 220 195 , 212 73 , 1 7 , 3 220 = − = +−
+ x x
= 0.8224×100% = 82,24%
- Daya keluaran generator = V . I1
= 220 . 3,7 = 814 Watt
42 = (3,7 + 0.19)2. 3,7 + 220.0.19 + 70,615)
= 55,99 + 41,8 + 70,615 = 168,405 Watt
- Jadi,Wg = 168,405 Watt
Efisiensi Generator % 100 1 1 % 100 x W VI VI x W keluaran Daya keluaran Daya g g g + = + = η
= 100% 0.8285
405 , 982 814 % 100 405 , 168 7 , 3 220 7 , 3 220 = = +
× × x x
= 0.8285×100% = 82,85%
e.Pada Beban Kelima.
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V.I2 – {(I1+I3)2. Ra + (I1+I2-I4)2 . Ra + V.I3 + V.I4}
= 220.2,34 –{(4,8+0,19)2.3,7+(4,8+2,34-0,18)2.3,7+220.0,19+220.0,18} = 514,8– ( 92,13 + 179,23 + 41,8+ 39,6 )
= 162,03 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 81,02 Watt Daya masuk ke motor = V . ( I1+I2 )
= 220 . ( 4,8 + 2,34 )
= 1570,8 Watt
Total rugi-rugi motor = (I1+I2-I4)2 . Ra + V.I4 + Wm
43 Maka, Wm = 299,92 Watt
Efisiensi motor ( ηm )
(
)
(
)
100%2 1 2 1 % 100 x I I V W I I V x masukan Daya Rugi Rugi masukan Daya m m + − + = − − =
∑
η =(
)
(
)
100% 0,80908 , 1570 92 , 299 8 , 1570 % 100 34 , 2 8 , 4 220 92 , 299 34 , 2 8 , 4 220 = − = + −
+ x x
= 0.8090×100% = 80,90%
- Daya keluaran generator = V . I1 = 220 . 4,8
= 1056 Watt
- Total rugi-rugi generator = (Ig+Ifg)2. Ra + V.Ifg + W/2
= (4,8 + 0.19)2. 3,7 + 220.0.19 + 81,02) = 92,13 + 41,8 + 81,02
= 214,95 Watt - Jadi,Wg = 214,95 Watt
Efisiensi Generator % 100 % 100 x W VIg VIg x W keluaran Daya keluaran Daya g g g + = + = η
= 100% 0.8308
95 , 1270 1056 % 100 95 , 214 8 , 4 220 8 , 4 220 = = +
× × x x
44 Dari hasil perhitungan diatas maka dapat dibuat tabel hasil analisa data seperti yang terdapat dalam Tabel 2 dan 3 dibawah ini:
[image:52.595.80.532.236.438.2]Dimana : Tegangan Sumber ( V) = 220 Volt ( Konstan ) Tahanan jangkar kedua mesin =3,7 ohm
Tabel .2 Tabel Hasil Analisa Data Motor Pada Pengujian Hopkinson
NO BEBAN Vs V2 I1 I2 I3 I4 Wm ηm Volt Volt Amp Amp Amp Amp Watt % 1 Beban Pertama 220 0 0 0,65 0,17 0,15 69,71 51,25 2 Beban Kedua 220 0 1 0,8 0,19 0,16 87,05 78 3 Beban Ketiga 220 0 2,3 1,33 0,19 0,17 153,865 80,73 4 Beban Keempat 220 0 3,7 1,73 0,19 0,18 212,195 82,24 5 Beban Kelima 220 0 4,8 2,34 0,19 0,18 299,92 80,92
Tabel.3 Tabel Hasil Analisa Data Generator Pada Pengujian Hopkinson
[image:52.595.85.530.487.690.2]45 BAB V
KESIMPULAN DAN SARAN V.1 KESIMPULAN
Dari hasil pembahasan yang dilakukan, maka diperoleh kesimpulan sebagai berikut: 1. Pengujian hopkinson dapat dilakukan pada kondisi dibawah beban penuh
2. Nilai rugi-rugi terendah dari motor yang didapat dari pengujian ini adalah pada saat percobaan beban pertama yaitu: 69,71 Watt
3. Nilai rugi-rugi tertinggi dari motor yang didapat dari pengujian ini adalah pada saat percobaan beban kelima yaitu : 299,92 Watt
4. Nilai efisiensi tertinggi dari motor yang didapat dari pengujian ini adalah: pada saat pembebanan percobaan beban keempat yaitu : 82,24%
46 V.2 SARAN
1. Baik tidaknya hasil pengujian dengan metode hopkinson ini dapat dipengaruhi ketelitian membaca alat-alat ukur dan penggunaan alat-alat ukur yang mempunyai sensitivitas yang baik.
47 DAFTAR PUSTAKA
1. Clayton, A.E dan N.N,Hancock, “Performance and Design of DC Machines”,The English Language Book Society,London,1974.
2. Mehta,V,K, dan Mehta, Rohit,”Principle Of Electrical Technology”,S.Chand & Company LTD, New Delhi,2002.
3. Sumanto, ”Mesin Arus Searah”, Andi Offset, Yogyakarta, 1991.
4. Theraja, B.L, ”A Text-Book Of Electrical Technology”, Nurja Construction & Development, New Delhi, 1989.
5. Wijaya, Mochtar, ”Dasar-Dasar Mesin Listrik”, Penerbit Djambatan, Jakarta, 2001. 6. Zuhal, “Dasar Teknik Tenaga Listrik dan Elektronika Daya”, Edisi ke-5, Penerbit