PENGARUH POSISI SIKAT DAN PENAMBAHAN KUTUB BANTU TERHADAP EFISIENSI DAN TORSI MOTOR DC SHUNT
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan
pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Sub Konsentrasi Teknik Energi Listrik
Oleh
JESAYAS SIHOMBING
NIM : 090402087
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
LEMBAR PENGESAHAN
TUGAS AKHIR
PENGARUH POSISI SIKAT DAN PENAMBAHAN KUTUB BANTU TERHADAP EFISIENSI DAN TORSI MOTOR DC SHUNT
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Oleh:
JESAYAS SIHOMBING NIM: 090402087
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar Sarjana Teknik pada
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
Sidang pada tanggal 30 bulan April tahun 2014 di depan penguji:
1) Ir. Eddy Warman M.T : Ketua Penguji
2) Ir. Panusur SML.Tobing : Anggota Penguji
Disetujui oleh:
Pembimbing Tugas Akhir
Ir. Syamsul Amien, MS NIP: 195306221981031002
Diketahui oleh:
Ketua Departemen Teknik Elektro FT USU
ABSTRAK
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi
listrik menjadi energi mekanik. Pada penggunaannya motor arus searah harus
disesuaikan dengan kebutuhan agar ekonomis dan efisiensi. Untuk memenuhi
semuannya ini, maka diperlukan motor arus searah yang memiliki efisiensi dan
torsi tinggi.Pengaturan posisi sikat dan penambahan kutub bantu berpengaruh
terhadap kinerja dari motor DC. Dengan mengatur posisi sikat dan menambahkan
kutub bantu, maka akan diperoleh efisiensi dan torsi yang lebih baik sehingga
motor DC dapat bekerja dengan lebih baik.
Pada tugas akhir ini akan dibahas pengaruh posisi sikat dan penambahan
kutub bantu terhadap efisiensi dan torsi motor dc shunt.Berdasarkan hasil
pengujian dan perhitungan, efisiensi yang tertinggi diperoleh pada posisi sikat
+300 yaitu pada motor DC shunt tanpa kutub bantu sebesar 64,70 %, sedangkan
pada motor DC shunt dengan kutub bantu sebesar 65,09 %. Torsi yang tertinggi
diperoleh pada posisi sikat -300 yaitu pada motor DC shunt tanpa kutub bantu
sebesar 2,88 N-m, sedangkan pada motor DC shunt dengan kutub bantu sebesar
13,23 N-m.
KATA PENGANTAR
Puji syukur penulis ucapkan kehadirat Tuhan Yang Maha Esa dimana atas
berkat, karunia, dan rahmat-Nya lah penulis dapat menyelesaikan tugas akhir ini,
dengan judul :
“Pengaruh Posisi Sikat Dan Penambahan Kutub Bantu Terhadap Efisiensi
Dan Torsi Motor DC Shunt”
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Tugas akhir ini merupakan suatu syarat bagi penulis untuk memperoleh
gelar Sarjana Teknik dari Departemen Teknik Elektro Fakultas Teknik Universitas
Sumatera Utara.
Tugas akhir ini penulis persembahkan kepada Amongku R. Sihombing dan
Inongku M. Sidabutar yang telah senantiasa memberikan doa dan kasih sayang
tiada hentinya kepada penulis, dan juga kepada Abangku U.M. Sihombing, SP
beserta ketiga Kakakku E. Sihombing, A. Sihombing, S.Pd, dan F. Sihombing,
S.Pd.
Dengan selesainya Tugas Akhir ini, penulis mengucapkan terima kasih yang
sebesar-besarnya kepada semua pihak yang telah membantu penulis dalam
menyelesaikan Tugas Akhir ini, antara lain kepada :
1. Bapak Ir. Surya Tarmizi Kasim, M.Si selaku Ketua Departemen Teknik
Elektro FT-USU.
2. Bapak Ir. Rahmat Fauzi, MT selaku Sekretaris Departemen Teknik Elektro
3. Bapak Ir. Syamsul Amin, M.S selaku dosen pembimbing Penulis yang telah
membantu dan membimbing penulis dalam menyelesaikan Tugas Akhir ini.
4. Bapak Ir. Panusur SML. Tobing dan Ir. Eddy Warman, MT selaku dosen
penguji Penulis yang telah membantu dan membimbing penulis dalam
menyelesaikan Tugas Akhir ini.
5. Bapak F. Rizal Batubara, ST. M.Ti selaku dosen wali Penulis yang telah
membantu dan membimbing penulis dalam menjalani masa perkuliahan.
6. Seluruh staf pengajar di Departemen Teknik Elektro Fakultas Teknik
Universitas Sumatera Utara yang telah membekali Penulis dengan ilmu
pengetahuan selama menjalani perkuliahan.
7. Seluruh karyawan di Departemen Teknik Elektro Fakultas Teknik Universitas
Sumatera Utara.
8. Sahabat sekaligus teman-teman Penulis stambuk 2009 yang tak dapat
disebutkan satu persatu terutama sendok community.
9. Teman-teman WAR, Putri Tamba, Mumbane Napitupulu, Ktbffhoo Sitompul,
Pemulabgt Sitohang, Sinamotevee Simanjuntak, Rhastaonasis Pasaribu, Felix
Niko Marpaung, Madao Tampubolon, Kuchiyose Tanzil, Comelectric
Nainggolan, Impal Sembiring.
10.Bambang, Samson, dan Raymon yang telah membantu Penulis dalam
mengambil data di laboratorium.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kata sempurna,
baik itu dari segi isi maupun susunan tata bahasanya. Untuk itu Penulis dengan
tangan terbuka menerima saran dan kritik dari pembaca dengan tujuan
Akhir kata, Penulis berharap tugas akhir ini bisa bermanfaat dan
menambah wawasan bagi para pembacanya.
Medan, Februari 2014
Jesayas Sihombing
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... viii
DAFTAR TABEL ...x
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penulisan ... 2
1.3. Batasan Masalah ... 2
1.4. Metode Penulisan ... 3
1.5. Sistematika Penulisan ... 3
BAB II TINJAUAN PUSTAKA ... 5
2.1. Motor Arus Searah ... 5
2.2. Prinsip Kerja Motor Arus Searah ... 6
2.3. Reaksi Jangkar ... 8
2.3.1. Pergeseran Sikat (Brush Shifting) ... 11
2.3.2. Penambahan Kutub Bantu (Interpole) ... 13
2.3.3. Belitan Kompensasi (Compensating Windings) ... 14
2.4.1. Motor Arus Searah Penguatan Bebas ... 15
2.4.2. Motor Arus Searah Penguatan Sendiri ... 16
2.5. Rugi-Rugi Motor Arus Searah ... 19
2.5.1. Rugi-Rugi Tembaga (Copper Loss) ... 21
2.5.2. Rugi-Rugi Inti (Core or Iron Losses) ... 21
2.5.3. Rugi-Rugi Mekanis (Mechanical Losses) ... 23
2.5.4. Rugi-Rugi Sikat (Brush Losses) ... 24
2.5.5. Rugi-Rugi Beban Stray (Stray Load Losses) ... 25
2.6. Torsi Motor Arus Searah ... 26
2.6.1. Torsi Jangkar ... 27
2.6.2. Torsi Poros... 28
2.7. Efisiensi Pada Mesin Arus Searah ... 29
BAB III METODE PENELITIAN ... 30
3.1. Umum ... 30
3.2. Waktu dan Tempat Penelitian ... 30
3.3. Objek Penelitian ... 30
3.4. Variabel Penelitian ... 30
3.5. Metode Pengumpulan Data ... 31
3.5.1. Metode Dokumentasi... 31
3.5.2. Metode Observasi ... 31
3.6.1. Tahap Persiapan... 32
3.6.2. Tahap Pengambilan Data ... 32
3.7. Teknik Analisa Data ... 32
3.8. Alat Dan Bahan ... 34
3.9. Rangkaian Pengujian ... 34
3.9.1. Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu ... 34
3.9.2. Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu ... 35
3.10. Prosedur Pengujian ... 35
3.10.1. Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu ... 35
3.10.2. Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu ... 36
BAB IV HASIL DAN PEMBAHASAN ... 38
4.1. Umum ... 38
4.2. Data Pengujian... 39
4.3. Analisa Data ... 40
4.3.1 Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu ... 40
4.3.2 Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu ... 42
BAB V KESIMPULAN DAN SARAN ... 46
5.1. Kesimpulan ... 46
5.2. Saran ... 46
DAFTAR GAMBAR
Gambar 2.1 Prinsip Kerja Motor Arus Searah ... 6
Gambar 2.2 Fluksi yang dihasilkan oleh kumparan medan ... 8
Gambar 2.3 Fluksi yang dihasilkan oleh kumparan jangkar ... 9
Gambar 2.4 Hasil kombinasi santara fluksi medan dan fluksi jangkar ... 10
Gambar 2.5 Pelemahan ggm akibat pergeseran bidang netral ... 12
Gambar 2.6 Pergeseran garis netral akibat reaksi jangkar ... 13
Gambar 2.7 Kutub magnet utama dan kutub bantu... 14
Gambar 2.8 Rangkaian ekivalen motor dc penguatan bebas ... 15
Gambar 2.9 Rangkaian ekivalen motor dc penguatan shunt ... 16
Gambar 2.10 Rangkaian ekivalen dc penguatan seri ... 17
Gambar 2.11 Rangkaian ekivalen motor dc penguatan kompon pendek ... 18
Gambar 2.12 Rangkaian ekivalen motor dc penguatan kompon panjang ... 19
Gambar 2.13 Diagram aliran daya pada motor arus searah ... 20
Gambar 2.14 Perputaran jangkar di dalam motor dua kutub ... 22
Gambar 2.15 (a) Arus pusar di dalam jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi ... 23
Gambar 2.16 Suatu pulley yang berputar karena mengalami suatu gaya ... 26
Gambar 3.2 Rangkaian Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub
Bantu ... 35
Gambar 4.1 Grafik Perbandingan Efisiensi Motor DC Shunt Tanpa Kutub Bantu
vs Motor DC Shunt Dengan Kutub Bantu ... 44
Gambar 4.2 Grafik Perbandingan Torsi Motor DC Shunt Tanpa Kutub Bantu vs
DAFTAR TABEL
Tabel 4.1 Data Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu ... 39
Tabel 4.2 Data Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu .... 40
Tabel 4.3 Hasil Perhitungan Efisiensi Dan Torsi Posisi Sikat Motor DC Shunt
Tanpa Kutub Bantu ... 41
Tabel 4.4 Hasil Perhitungan Efisiensi Dan Torsi Posisi Sikat Motor DC Shunt
Dengan Kutub Bantu ... 43
Tabel 4.5 Perbandingan Efisiensi Motor DC Shunt Tanpa Kutub Bantu Dengan
Motor DC Shunt Dengan Kutub Bantu ... 43
Tabel 4.6 Perbandingan Torsi Motor DC Shunt Tanpa Kutub Bantu Dengan
ABSTRAK
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi
listrik menjadi energi mekanik. Pada penggunaannya motor arus searah harus
disesuaikan dengan kebutuhan agar ekonomis dan efisiensi. Untuk memenuhi
semuannya ini, maka diperlukan motor arus searah yang memiliki efisiensi dan
torsi tinggi.Pengaturan posisi sikat dan penambahan kutub bantu berpengaruh
terhadap kinerja dari motor DC. Dengan mengatur posisi sikat dan menambahkan
kutub bantu, maka akan diperoleh efisiensi dan torsi yang lebih baik sehingga
motor DC dapat bekerja dengan lebih baik.
Pada tugas akhir ini akan dibahas pengaruh posisi sikat dan penambahan
kutub bantu terhadap efisiensi dan torsi motor dc shunt.Berdasarkan hasil
pengujian dan perhitungan, efisiensi yang tertinggi diperoleh pada posisi sikat
+300 yaitu pada motor DC shunt tanpa kutub bantu sebesar 64,70 %, sedangkan
pada motor DC shunt dengan kutub bantu sebesar 65,09 %. Torsi yang tertinggi
diperoleh pada posisi sikat -300 yaitu pada motor DC shunt tanpa kutub bantu
sebesar 2,88 N-m, sedangkan pada motor DC shunt dengan kutub bantu sebesar
13,23 N-m.
BAB I
PENDAHULUAN
1.1. Latar Belakang
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi
listrik menjadi energi mekanik. Motor arus searah merupakan salah satu motor
listirk yang jarang digunakan untuk aplikasi industri biasa. Hal ini disebabkan
karena sistem peralatan listrik yang menggunakan arus bolak-balik.
Motor arus searah sudah banyak dipergunakan di industri atau
pabrik-pabrik seperti pabrik-pabrik baja, tambang dan kereta api listrik. Juga dapat dimanfaatkan
sebagai tenaga penggerak bagi peralatan-peralatan mekankik lainnya seperti
pompa, penggerak kipas angin, blower, lift, eskalator, penggerak pulley konveyor,
dan lain-lain.
Motor arus searah biasanya digunakan terutama untuk melayani beban
dengan torsi start yang besar dan memiliki efisiensi yang tinggi sehingga lebih
unggul bila dibandingkan dengan motor induksi ataupun motor sinkron. Pada
penggunaannya motor arus searah harus disesuaikan dengan kebutuhan agar
ekonomis dan efisiensi. Untuk memenuhi semuannya ini, maka diperlukan motor
arus searah yang memiliki efisiensi dan torsi tinggi.
Pada motor arus searah suplai daya yang diperoleh bearsal dari sumber
tegangan listrik arus searah. Dimana sumber tegangan searai ini diberikan kepada
kumparan jangkar dan kumparan medan dari motor tersebut.
Disaat motor diberi beban, maka fluksi akan berkurang dan amper-turn
jangkar. Reaksi jangkar sangat berpengaruh terhadap kinerja, efisiensi, dan torsi
dari motor tersebut. Untuk mengurangi reaksi jangkar ini, ada tiga cara/teknik
yang dapat dilakukan yaitu melakukan pergeseran posisi sikat, menambahkan
kutub bantu, dan belitan kompensasi.Pada tugas akhir ini akan dibahas pengaruh
posisi sikat dan penambahan kutub bantu terhadap efisiensi dan torsi motor arus
searah shunt.
1.2. Tujuan dan Manfaat Penulisan
Adapun tujuan penulisan tugas akhir ini adalah :
1. Mengetahui pengaruh posisi sikat terhadap efisiensi dan torsi motor dc
shunt.
2. Mengetahui pengaruh penambahan kutub bantu terhadap efiesiensi dan
torsi motors dc shunt.
3. Memperlihatkan perbandingan efisiensi dan torsi terhadap posisi sikat
motor dc shunt tanpa kutub bantu dan motor dc shunt dengan kutub bantu.
Manfaat dari penulisan tugas akhir adalah sebagai bahan acuan guna
memberikan pemahaman yang lebih jelas tentang bagaimana perubahan efisiensi
dan torsi motor dc bila dilakukan pergeseran sikat dan penambahan kutub bantu.
1.3. Batasan Masalah
Supaya materi yang dipaparkan dalam tugas akhir ini lebih terarah dan
maksimal, maka penulis membatasi permasalahan yang akan dibahas. Adapun
batasan masalah yang akan dibahas adalah :
2. Tidak memperhitungkan rugi-rugi sikat dan rugi gesek dan angin pada
motor dc shunt.
3. Hanya membahas motor dc dalam keadaan berbeban.
4. Analisis perhitungan berdasarkan peralatan yang tersedia di Laboratorium
Konversi Energi Listrik.
1.4. Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan
beberapa metode penulisan diantaranya :
1. Studi literature yaitu dengan membaca teori-teori yang berkaitan dengan
topik tugas akhir ini dari buku-buku referensi baik yang dimiliki oleh
penulis atau dari perpustakaan dan juga dari jurnal, artikel-artikel, internet,
dan lain-lain.
2. Studi lapangan yaitu dengan melaksanakan percobaan di Laboratorium
Konversi Energi Listrik FT-USU.
3. Studi bimbingan yaitu dengan melakukan diskusi tentang topik tugas akhir
ini dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen
Teknik Elektro USU, asisten Lab, dan teman-teman sesama mahasiswa.
1.5. Sistematika Penulisan
Untuk memberikan gambaran tentang tugas akhir ini, secara singkat dapat
diuraikan sebagai berikut :
BAB I. PENDAHULUAN
Bab ini berisi tentang latar belakang masalah, tujuan dan manfaatpenulisan,
BAB II. TINJAUAN PUSTAKA
Bab ini berisi tentang motor arus searah, prinsip kerja motor arus searah,
reaksi jangkar, jenis-jenis motor arus searah, rugi-rugi motor arus searah,
torsi motor arus searah, dan efisiensi.
BAB III. METODE PENELITIAN
Bab ini berisi tentang waktu dan tempat penelitian, objek penelitian,
variabel penelitian, metode pegumpulan data, langkah-langkah penelitian,
teknik analisa data, alat dan bahan, rangkaian pengujian, dan prosedur
pengujian.
BAB IV. ANALISA DATA
Bab ini berisi hasil-hasil eksperimen yang berkenaan dengan pengaruh
posisi sikat dan penambahan kutub bantu terhadap efisiensi dan torsi motor
dc shunt berupa data percobaan serta penganalisaannya.
BAB V. KESIMPULAN DAN SARAN
Bab ini membahas tentang hal-hal yang dianggap penting didalam tulisan
yang dirangkum sebagai kesimpulan dan saran dari hasil analisa data-data
BAB II
TINJAUAN PUSTAKA
2.1. Motor Arus Searah
Motor arus searah adalah suatu mesin listrik yang berfungsi mengubah
energi listrik asrus searah (DC) menjadi energi gerak atau energi mekanik, dimana
energi gerak mekanik tersebut berupa putaran rotor. Proses pengkonversian energi
listrik menjadi energi mekanik tersebut berlangsung di dalam medan magnet.
Berdasarkan konstruksinya, motor arus searah secara umum terdiri atas
bagian yang diam (stator) dan bagian yang berputar (rotor). Pada bagian yang
diam merupakan tempat diletakkannya kumparan medan yang berfungsi untuk
menghasilkan fluksi magnet sedangkan pada bagian yang berputar ditempati oleh
rangkaian jangkar seperti kumparan jangkar, komutator dan sikat.
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi
magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang
arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan
menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet
ini akan menimbulkan suatau gaya sehingga akan menimbulkan torsi.
Motor arus searah biasanya digunakan terutama untuk melayani beban
dengan torsi start yang besar dan memiliki efisiensi yang tinggi sehingga lebih
unggul bila dibandingkan dengan motor induksi ataupun motor sinkron. Pada
penggunaannya motor arus searah harus disesuaikan dengan kebutuhan agar
ekonomis dan efisiensi. Untuk memenuhi semuannya ini, maka diperlukan motor
Disaat motor diberi beban, maka fluksi akan berkurang dan amper-turn
medan akan berkurang juga. Hal ini disebabkan oleh karena adanya reaksi
jangkar. Reaksi jangkar sangat berpengaruh terhadap kinerja, efisiensi, dan torsi
dari motor tersebut. Untuk mengurangi reaksi jangkar ini, ada tiga cara/teknik
yang dapat dilakukan yaitu melakukan pergeseran posisi sikat, menambahkan
kutub bantu, dan belitan kompensasi.
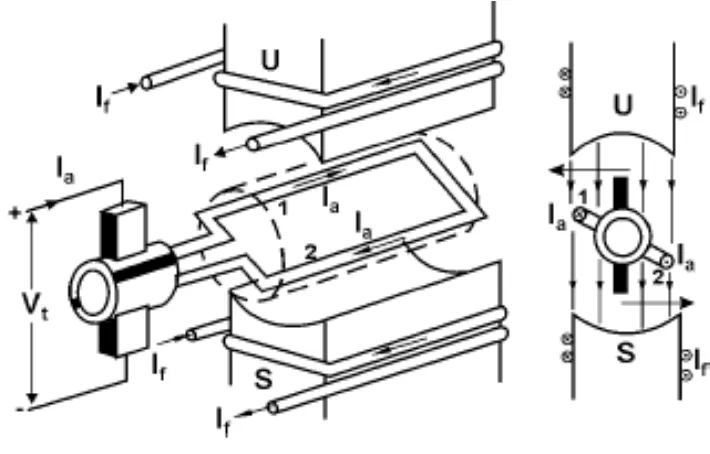
2.2. Prinsip Kerja Motor Arus Searah
Prinsip kerja motor arus searahdapat dijelaskan dengan Gambar 2.1 berikut :
Gambar 2.1 Prinsip Kerja Motor Arus Searah
Motor DC bekerja berdasarkan prinsip interaksi antara dua fluksi
magnetic. Ketika kumparan medab dan kumparan jangkar dihubungkan dengan
sumber tegangan DC maka pada kumparan medan mengalir arus medan (If) pada
kumparan medan, sehingga menghasilkan fliksi magnet yang arahnya dari kutub
jangkar (Ia), sehingga pada konduktor kumparan jangkar timbul fluksi magnet
yang melingkar. Fluksi jangkar ini akan memotong fluksi dari kumparan medan
sehingga menyebabkan perubahan kerapatan fluksi dari medan utama. Sesuai
hukum Lorentz, interaksi antara kedua fluksi magnet ini akan menimbulkan suatu
gaya mekanik pada konduktor jangkar yang disebut gaya Lorentz. Besar gaya ini
sesuai dengan persamaan 1 berikut ini [1] :
F = B .i .l (2.1)
Dimana :
F= gaya yang bekerja pada konduktor (N)
B = kerapatan fluks magnetik (Wb/m2)
i = arus yang mengalir pada konduktor (A)
l = panjang konduktor (m)
Arah gaya ini dapat ditentukan dengan kaidah tangan kiri Flemming.
Kaidah tangan kiri menyatakan, jika jari telunjuk menyatakan arah dari vektor
kerapatan fluks B dan jari tengah menyatakan arah dari vektor arus I, maka ibu
jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut.
Gaya yang timbul pada konduktor jangkar tersebut akan menghasilkan
momen putar atau torsi. Torsi yang dihasilkan motor dapat ditentukan dengan
persamaan 2 berikut ini :
Ta = F .r (2.2)
Dimana : Ta = torsi jangkar (N-m)
2.3. Reaksi Jangkar
Reaksi jangkar merupakan medan magnet yang disebabkan oleh
mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam mangnet.
Reaksi jangkar menyebabkan terjadinya 2 hal yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama.
2. Magnetisasi silang.
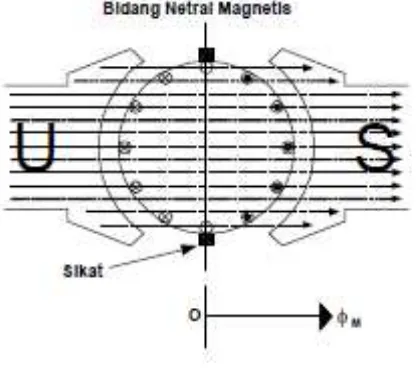
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak
dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi
ideal untuk kutub utama dari motor arus searah dua kutub berasal dari kutub utara
menuju kutub selatan seperti terlihat pada Gambar 2.2 berikut ini :
Gambar 2.2 Fluksi yang dihasilkan oleh kumparan medan
Dari Gambar 2.2 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis
Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefenisikan sebagai bidang di dalam motor
gerak listrik industry pada bidang tersebut adalah nol. Seperti yang terlihat dari
Gambar 2.2 sikat selalu ditempatkan disepanjang bidang netral magnetis. Oleh
karena itu, bidang netral magnetis disebut juga sebagai sumbu komutasi karena
pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili
besar dan arah dari fluksi medan utama, dimana vektor ini tegak lurus terhadap
bidang netral matgnetis.
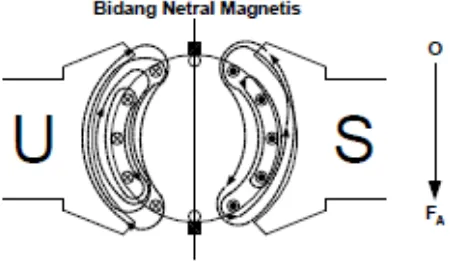
Sewaktu hanya konduktor jangkar saja yang dialiri arus listrik sementara
kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul
ggm atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada Gambar 2.3
berikut ini :
Gambar 2.3 Fluksi yang dihasilkan oleh kumparan jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar
ditentukan dengan aturan putaran sekrup. Besar dan arah garis gaya magnet
tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis.
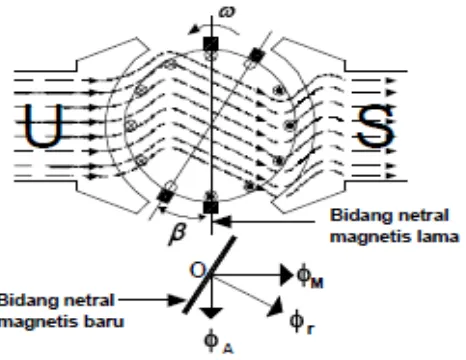
Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan
konduktor medan sama-sama dialiri oleh arus listrik, distribusi fluksi resultan
diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karenanya distribusi
mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal
tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat pada Gambar 2.4
berikut ini :
Gambar 2.4 Hasil kombinasi santara fluksi medan dan fluksi jangkar
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang
fluksi medan utama pada setengah bagian dari salah satu kutubnya dan
memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas
akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah
satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang
sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangar yang
memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar
magnetisasi silang (cross-magnetization).
Magnetisasi silang ini juga menyebabkan pergeseran bidang netral. Pada
Gambar 2.4 terlihat bahwa vektor OF merupakan resultan vektor OFA dan OFM,
serta posisi bidang netral magnetis yang baru, dimana selalu tegak lurus terhadap
vektor OF. Bidang netral magnetis motor yang baru bergeser sejauh β karena
pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran
bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen
komutator dekat sikat.
Kebanyakan mesin listrik bekerja pada kerapatan fluksi yang dekat dengan
titik jenuhnya sehingga dapat menimbulkan kejenuhan magnetik. Apabila
kejenuhan magnetik terjadi, maka efek penguatan fluksi resultan lebih kecil bila
dibandingkan dengan efek pelemahan fluksi resultan atau dengan kata lain
pertambahan kerapatan fluksi resultan pada salah satu bagian kutub lebih sedikit
bila dibandingkan dengan pengurangan kerapatan fluksi pada bagian yang
lainnya. Sehingga fluksi resultan akan berkurang dari harga tanpa bebannya. Hal
inilah yang disebut sebagai efek demagnetisasi reaksi jangkar dan perlu dicatat
bahwa demagnetisasi timbul hanya karena adanya saturasi magnetik.
Akibat pelemahan fluks ini, efek yang ditimbulkan pada motor arus searah
menjadi lebih serius, dimana pelemahan fluks akan menyebabkan motor arus
searah khususnya motor arus searah parallel akan demikian cepatnya hingga tak
terkendali.
Oleh sebab itu, perlu dilakukannya hal-hal yang dapat mencegah atau
mengurangi terjadinya hal diatas. Ada tiga cara yang dapat dilakukan, yaitu
1. Pergeseran sikat (Brush Shifting)
2. Penambahan kutub bantu (Interpole)
3. Belitan kompensasi (Compensating Windings)
2.3.1. Pergeseran Sikat (Brush Shifting)
Sikat berfungsi sebagai jembatan bagi aliran arus ke kumparan jangkar.
perpindahan garis netral searah dengan arah putaran motor. Dalam hal ini sikat
yang semula segaris dengan garis netral, kini bergeser beberapa derajat dari garis
netral. Untuk itu sikat dipindahkan seirama dengan perpindahan bidang netral.
Namun dalam penerapannya hal ini cukup sulit karena jarak perpindahan bidang
netralnya sangat ditentukan oleh besarnya beban yang dipikul oleh mesin
sehingga setiap ada perubahan besarnya beban yang dipikul, maka jarak
perpindahan bidang netralnya pun berpindah. Sehingga sikat juga harus dirubah
setiap saat, seirama dengan perubahan jarak perpindahan bidang netral. Selain itu
pergeseran sikat akan memperburuk melemahnya fluks akibat reaksi jangkar
mesin.
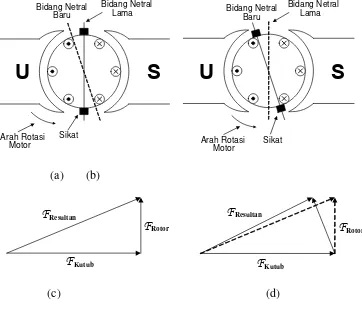
Adapun efek diperburuknya fluks akibat reaksi jangkar dapat dilihat pada
Gambar 2.5 berikut ini :
U
S
Bidang Netral Lama Bidang Netral Baru Sikat Arah Rotasi MotorU
S
Bidang Netral Lama Bidang Netral Baru Sikat Arah Rotasi Motor (a) (b)F
KutubF
RotorF
ResultanF
ResultanF
RotorF
Kutub(c) (d)
Pada Gambar 2.5 (a) diperlihatkan kondisi ketika bidang netral mesin
bergeser dan sikat mesin masih tetap pada posisi semula. Ggm resultan yang
terbentuk dapat dilihat pada Gambar 2.5 (c). Sedangkan pada Gambar 2.5 (b)
terlihat bidang netral yang bergeser disertai dengan bergesernya sikat mesin.
Akibat pergeseran tersebut ggm resultannya melemah sedemikian rupa. Hal
tersebut dapat dilihat pada Gambar 2.5 (d).
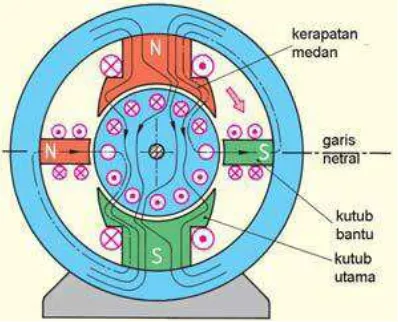
2.3.2. Penambahan Kutub Bantu (Interpole)
Untuk mengembalikan garis netral ke posisi semula maka dipasang kutub
bantu (interpole). Kutub bantu ini berupa kutub magnet yang ukuran fisiknya
lebih kecil dari kutub utama. Kutub bantu (interpole) ini dihubungkan seri
terhadap kumparan rotor. Kutub bantu akan memperpendek jalannya garis medan
magnet. Dengan dipasang kutub bantu maka garis netral akan kembali ke posisi
semula dan kedudukan sikat tegak lurus dengan kutub utamanya.
Gambar 2.7 Kutub magnet utama dan kutub bantu
2.3.3. Belitan Kompensasi (Compensating Windings)
Belitan kompensasi ini dihubungkan seri terhadap kumparan, rotor belitan
ini bertujuan untuk mengurangi penyimpangan yang timbul akibat reaksi jangkar.
Fluks yang ditimbulkan oleh reaksi jangkar diimbangi oleh fluks yang
ditimbulkan oleh belitan kompensasi yang besarnya sama dan berlawanan. Ketika
beban berubah, maka reaksi jangkar yang berubah akan selalu diimbangi oleh
belitan kompensasi, sehingga bidang netralnya tidak bergeser.
Teknik ini memiliki kelemahan karena mahal harganya, juga masih
memerlukan kutub bantu (interpole) untuk mengatasi tegangan yang tidak dapat
diatasi oleh belitan kompensasi. Karenanya teknik ini tidak digunakan untuk
motor-motor yang bekerja ekstra berat, dimana pelemahan fluks akan menjadi
masalah yang serius [2].
2.4. Jenis-Jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis
penguatannya yaitu hubungan rangkaian kumparan medan magnet dengan
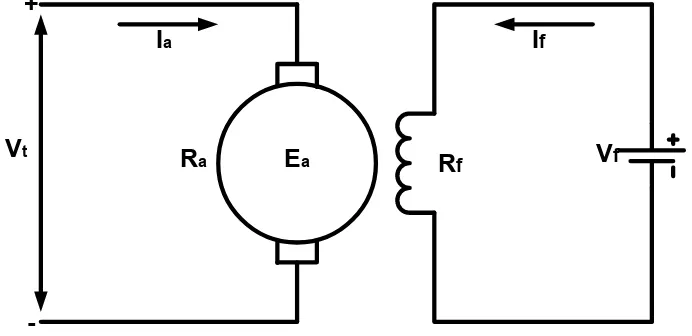
2.4.1. Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber
tegangan penguatannya berasal dari luar motor. Dimana kumparan medan disuplai
dari sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah
penguatan bebas dapat dilihat pada Gambar 2.7 berikutini :
Ra Ia
Ea Rf Vf
If
Vt +
-Gambar 2.8 Rangkaian ekivalen motor dc penguatan bebas
Persamaan umum motor arus searah penguatan bebas
V = Ea+ IaRa (2.3)
Vf = If+ Rf (2.4)
Dimana: V = tegangan terminal jangkar motor arus searah Volt
Ia = arus jangkar Ampere
Ra= tahanan jangkar Ohm
If = arus medan penguatan bebas Ampere
Rf= tahanan medan penguatan bebas Ohm
Vf= tegangan terminal medan penguatan bebas Volt
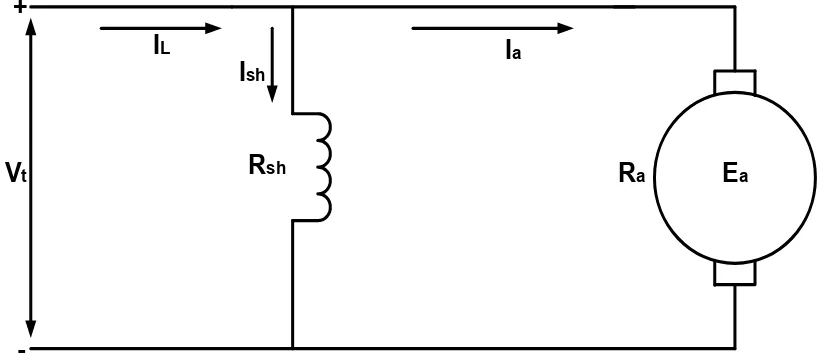
2.4.2. Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri dibagi atas tiga yaitu
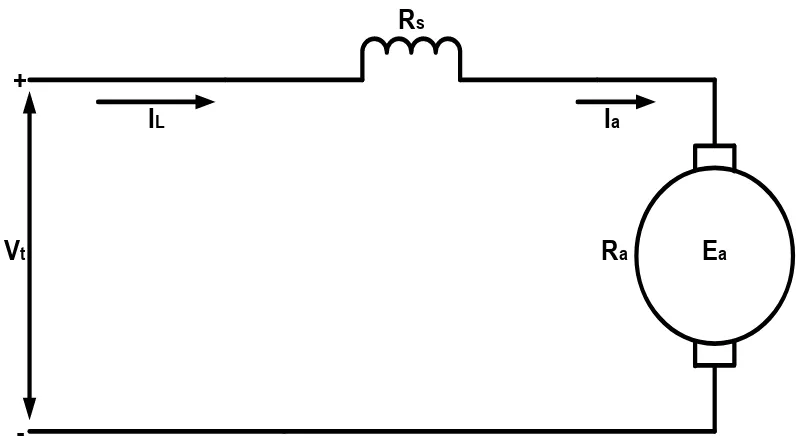
1. Motor Arus Searah Penguatan Shunt
R
aE
a+
-I
LV
tR
shI
shI
aGambar 2.9 Rangkaian ekivalen motor dc penguatan shunt
Persamaan umum motor arus searah penguatan shunt
Vt=Ea+IaRa
Vsh=Vt=Ish . Rsh (2.5)
IL=Ia+Ish (2.6)
Dimana : Ish=arus kumparan medan shunt (Ampere)
Vsh=tegangan terminal medan shunt motor arus searah Volt
Rsh=tahanan medan shunt (Ohm)
2. Motor Arus Searah Penguatan Seri
R
aE
a+
-I
LV
tI
a [image:30.595.121.521.127.346.2]R
sGambar 2.10 Rangkaian ekivalen dc penguatan seri
Persamaan umum motor arus searah penguatan seri
Vt= Ea+ Ia Ra+ Rs (2.7)
Ia= [VRat-- E Ras] (2.8)
Ia= IL= If
Dimana : Ia=arus kumparan medan seri (Ampere)
Rs=tahanan medan seri (Ohm)
Ra=tahanan jangkar (Ohm)
Ea=gaya gerak listrik motor arus searah Volt
3. Motor Arus Searah Penguatan Kompon
Motor arus searah penguatan kompon terbagi atas dua, yaitu :
3.1Motor Arus Searah Penguatan Kompon Pendek
Ra Ea
+
-IL
Vt
Ia Rs
[image:31.595.119.527.188.368.2]Rsh Ish
Gambar 2.11 Rangkaian ekivalen motor dc penguatan kompon pendek
Persamaan umum motor arus searah penguatan kompon pendek
IL=Ia+Ish
Vt=Ea+IaRa+ILRs (2.9)
Pin=VtIL (2.10)
Dimana : ILRs=tegangan jatuh pada kumparan seri
IaRa=tegangan jatuh pada kumparan jangkar
Ea=gaya gerak listrik motor arus searah Volt
3.2Motor Arus Searah Penguatan Kompon Panjang
Ra Ea
+
-IL
Vt
Rs
Rsh
[image:32.595.121.524.127.304.2]Ish Ia
Gambar 2.12 Rangkaian ekivalen motor dc penguatan kompon panjang
Persamaan umum motor arus searah penguatan kompon panjang
IL=Ia+Ish
Vt=Ea+Ia(Ra+Rs) (2.11)
Pin=VtIL
Vt=Vsh
Dimana : IaRs=tegangan jatuh pada kumparan seri
IaRa=tegangan jatuh pada kumparan jangkar [3]
2.5. Rugi-Rugi Motor Arus Searah
Motor DC menerima daya masukan berupa energi listrik dan menghasilkan
daya keluaran berupa energi mekanis. Akan tetapi, tidak seluruh daya masukan ke
motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang
selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada
mengatasi gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi
daya dalam bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan
kenaikan temperatur motor yang dapat merusak isolasi dan mempercepat
berkurangnya umur ekonomis motor sehingga membatasi daya keluaran motor.
Berikut proses pengkonversian energipada motor DC dalam aliran daya di bawah
ini :
Daya input
V IL Watt
Daya mekanis yang dibangkitkan di
dalam jangkar Ea Ia Watt
Daya output motor
Tshω Watt
Rugi-rugi tembaga
Rugi-rugi besi dan mekanis
Energi Listrik Energi
[image:33.595.147.540.263.415.2]mekanis
Gambar 2.13 Diagram aliran daya pada motor arus searah
Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran
motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam
persamaan sinyatakan dengan :
∑ Rugi-Rugi = Daya Masukan – Daya Keluaran
Akhirnya, rugi-rugi di dalam motor DC didefenisikan sebagai selisih daya
antara daya masukan yang diterima motor dengan daya keluaran yang dapat
dihasilkannya dimana selisih daya tersebut berubah menjadi bentuk energi yang
2.5.1. Rugi-Rugi Tembaga (Copper Loss)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam kumparan
medan dan kumpran jangkar motor. Karena kawat tembaga kedua kumparan
tersebut memiliki nilai resistansi Rf dan Ra, maka jika mengalir arus searah
sebesar If dan Ia akan menyebabkan kerugian daya yang dihitung dengan
persamaan :
Pa=Ia2Ra (2.12)
Pf=If2Rf (2.13)
Dimana : Pa=rugi tembaga kumparan jangkar
Pf=rugi tembaga kumparan medan
Ia=arus jangkar
If=arus medan
Ra=resistansi jangkar
Rf=resistansi medan
2.5.2. Rugi-Rugi Inti (Core or Iron Losses)
Rugi-rugi ini terjadi di dalam jangkar motor DC yang disebabkan oleh
perputaran jangkar di dalam medan magnet kutub-kutubnya. Ada dua jenis
rugi-rugi inti yaitu :
1. Rugi Hysteresis
Rugi hysteresis terjadi di dalam jangkar mesin DC karena setiap bagian
jangkar dipengaruhi oleh pembalikan medan magnetic sebagaimana bagian
Gambar 2.14 Perputaran jangkar di dalam motor dua kutub
Gambar 2.14 menunjukkan jangkar yang berputar di dalam motor dua kutub.
Dengan menganggap ab sebagai potongan kecil dari jangkar. Ketika potongan ab
berada di bawah kutub N, garis-garis magnetik lewat dari a ke b. Setengah
perputaran selanjutnya, dari potongan besi yang sama berada di bawah kutub S
dan garis-garis magnetik lewat dari b ke a sehingga sifat magnet di dalam besi
dibalik.
Untuk dapat membalik molekul-molekul magnet secara terus menerus di
dalam inti jangkar, sejumlah daya diserap sehingga menyebabkan pemanasan
pada inti jangkar. Daya yang diserap dan berubah menjadi panas sebagai rugi-rugi
di dalam inti jangkar dan disebut sebagai rugi hysteresis. Untuk menentukan
besarnya rugi hysteresis di dalam inti jangkardigunakan persamaan
Steinmentzyaitu :
Ph= ηBmax1,6 f υ Watt (2.14)
Dimana : Ph=rugi hysteresis
Bmax=rapat fluks maksimum di dalam jangkar
f =frekuensi pembalikan magnetik
= 120n P dimana n dalam rpm dan P=jumlah kutub
υ=volume jangkar m3
2. Rugi Arus Pusar
Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor
jangkar, ada juga tegangan yang diinduksikan di dalam init jangkar. Tegangan ini
menghasilkan arus yang bersikulasi di dalam inti jangkar seperti yang ditunjukkan
dalam Gambar 2.15. Ini disebut sebagai arus pusar (eddy current) dan daya yang
hilang karena alirannya disebut dengan rugi arus pusar.
Rugi arus pusar berlaku sebagai panas yang dapat menaikkan temperatur
motor dan menurunkan efisiensinya. Jika suatu inti besi padat digunakan sebagai
inti jangkar, resistansi terhadap arus pusar ini akan menjadi kecil karena lebarnya
luas penampang inti. Akibatnya, nilai arus pusar dan juga rugi arus pusarnya akan
menjadi besar. Besarnya nilai arus pusar dapat dikurangi dengan membuat
resistansi inti sebesar mungkin secara praktisnya.
[image:36.595.134.471.415.530.2](a) (b)
Gambar 2.15 (a) Arus pusar di dalam jangkar yang padat (b) Arus pusar di
dalam inti jangkar yang dilaminasi
2.5.3. Rugi-Rugi Mekanis (Mechanical Losses)
Rugi-rugi mekanis di dalam mekanis motor DC merupakan rugi-rugi yang
berhubungan dengan efek-efek mekanis di dalam motor DC yaitu gesekan dan
Rugi-rugi gesekan adalah rugi-rugi yang disebabkan oleh pergesekan
antara permukaan bagian-bagian yang berputar dengan bagian-bagian yang diam
dari motor, diantaranya gesekan bearing atau bantalan peluru dengan rumah
bearing atau dengan as rotor. Juga gesekan antara permukaan sikat dengan
komutator. Karena adanya suatu nilai koefisien gesek antara permukaan
bagian-bagian tersebut walaupun kecil, diperlukan gaya untuk mengimbangi gaya lawan
akibat koefisien gesek tersebut jika ingin menggerakkan rotor motor DC tersebut.
Sedangkan rugi-rugi angin adalah rugi-rugi yang disebabkan oleh
pergesekan antara bagian-bagian motor yang berputar dengan udara di dalam
rumah (casing) motor. Baik itu pergesekan antara permukaan rotor dengan udara
pada celah udara di dalam motor ataupun gesekan udara dengan kipas pendingin
yang dipasangkan pada rotor di dalam motor. Rugi-rugi angin ini bervariasi
tergantung pada kecepatan rotasi motor tersebut.
2.5.4. Rugi-Rugi Sikat (Brush Losses)
Jika kumparan jangkar motor DC dialiri arus listrik DC maka
sikat-sikatnya juga akan dialiri arus yang sama. Karena sikat memiliki nilai resistansi
sikat dan juga tahanan kontak antara permukaan sikat dengan komutator maka
terdapat rugi jatuh tegangan pada sikat yang dinyatakan dengan Vbd. Jatuh
tegangan sikat ini menyebabkan timbulnya rugi-rugi daya sebesar :
Pbd=Vbd.Ia (2.15)
Dimana : Pbd=rugi daya akibat tegangan sikat
Ia=arus jangkar
Besarnya nilai jatuh tegangan sikat-sikat pada motor DC hampir konstan
dalam rentang arus jangkar yang besar. Maka rugi-rugi sikat dapat dihitung
dengan persamaan:
Pbd=2 x Ia (2.16)
2.5.5. Rugi-Rugi Beban Stray (Stray Load Losses)
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan oleh arus
pusar di dalam tembaga dan rugi-rugi inti tambahan di dalam besi, yang timbul
karena pendistorsian fluks magnetik oleh arus beban (tidak termasuk yang
disebabkan oleh jatuh tegangan IR) dan rugi-rugi hubung singkat komutasi.
Rugi-rugi beban stray ini tidak dapat dikategorikan ke dalam tipe rugi-rugi
yang disebutkan di atas. Di dalam perhitungan rugi motor DC, besarnya
rugi-rugi beban stray dinyatakan sebesar ± 1% dari beban penuh.
Rugi-rugi di dalam motor DC di atas juga dapat dikelompokkan menjadi
dua yaitu :
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor DC yang nilainya selalu
tetap, tidak tergantung pada arus pembebanan. Rugi-rugi inti + mekanis
disebut dengan rugi-rugi rotasi. Yang termasuk ke dalam kelompok rugi-rugi
konstan adalah :
a. Rugi-rugi inti yaitu rugi-rugi hysteresis dan arus pusar
b. Rugi-rugi mekanis yaitu rugi-rugi gesek dan angin.
c. Rugi-rugi tembaga medan shunt.
2. Rugi-rugi variabel yaitu rugi-rugi di dalam motor DC yang nilainya
bervarisasi terhadap arus pembebanan. Yang termasuk ke dalam kelompok
a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra).
b. Rugi-rugi tembaga kumparan medan seri (Ia2Rs)
c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam motor DC adalah :
∑ Rugi-Rugi = Rugi Konstan + Rugi Variabel [4]
2.6. Torsi Motor Arus Searah
Yang dimaksud torsi adalah putaran dari suatu gaya terhadap suatu poros.
Ini diukur dengan hasil gaya itu dengan jari-jari lingkaran dimana gaya tersebut
[image:39.595.227.392.493.591.2]bekerja.
Gambar 2.16 menunjukkan pada suatu pulley dengan jari-jari r bekerja suatu
gaya F Newton yang menyebabkan benda berputar dengan kecepatan n putaran
per detik.
Torsi = F x r Newton-meter (N-m) (2.17)
Usaha yang dilakukan oleh gaya tersebut pada suatu putaran, = F x 2 π r Joule
F
r
n putaran/detik
Gambar 2.16 Suatu pulley yang berputar karena mengalami suatu gaya
Daya yang dibangkitkan
= F x 2 π r x n Joule/detik
Jika :
2 π n = kecepatan sudut (ω) dalam rad/detik
F x r = torsi T
Maka daya yang dibangkitkan = T x ω Joule/detok
= T x ω Watt
2.6.1. Torsi Jangkar
Di dalam motor DC, setiap konduktor di bagian permukaan jangkar akan
mengalami gaya F pada suatu jarak r yang merupakan jari-jari jangkar (Gambar
2.16). Dengan demikian, masing-masing konduktor menghasilkan suatu torsi yang
cenderung untuk memutar jangkar. Jumlah seluruh torsi yang dihasilkan oleh
konduktor jangkar dikenal dengan torsi jangkar (Ta).
Jika pada suatu motor DC :
r = rata-rata jari-jari jangkar (meter)
l = panjang efektif masing-masing konduktor (meter)
Z = jumlah total konduktor jangkar
i = arus dalam setiap konduktor = Ia/A (Ampere)
B = rapat fluks rata-rata (Weber/meter2)
Φ = fluks per kutub (Weber)
P = jumlah kutub
Maka gaya pada setiap konduktor, F = B i l Newton
Torsi yang dihasilkan oleh suatu konduktor = F x r Newton-meter
Torsi jangkar total, Ta = Z F r Newton-meter
Sekarang i = Ia/A, B = Φ/a dimana a adalah luas penampang jalur fluks per kutub
pada jari-jari r. Jelasnya, a = 2 π r
P
Maka Ta = Z x Φ a
x
Ia
A
x l x r
= Z x Φ 2πr(1P)
x
Ia
A
x l x r
= ZΦIaP
2πA N-m
atau Ta = 0,159 Z Φ Ia(AP) (2.18)
karena Z, P dan A nilainya selalu tetap, maka :
Ta~ Φ Ia
Ekspresi lainnya untuk menyatakan besarnya torsi jangkar yaitu :
Ea = PΦZn
60 A
PΦZ A
=
60 Ea
n
Dari persamaan diatas diperoleh persamaan untuk Ta yaitu
Ta = 0,159 x
[
60 Ean
]
x I
aatau
Ta = 9,55 x EaIa
n N-m (2.19)
2.6.2. Torsi Poros
Torsi yang dapat dimanfaatkan pada poros untuk melakukan usaha yang
merupakan torsi yang akan menghasikan daya keluaran motor yang berguna. Jika
kecepatan motor adalah n rpm, maka
Daya keluaran (Watt) = π n Tsh
6
Atau Tsh =
Daya keluaran (watt) 2 π n/60
Atau Tsh = 9,55 x
Daya keluaran (watt)
n N-m (2.20)
2.7. Efisiensi Pada Mesin Arus Searah
Seperti halnya dengan mesin listrik lainnya, pada mesin listrik arus searah,
efisiensinya dinyatakan sebagai berikut :
η (%) = Pout
Pin x100% (2.21)
Dimana : Pi = daya masukan
BAB III
METODE PENELITIAN
3.1. Umum
Metode penelitian merupakan cara yang harus ditempuh dalam kegiatan
penelitian agar hasil yang akan dicapai dari suatu penelitian dapat memenuhi
secara ilmiah. Dengan demikian, maksud dari penyusunan metode ini agar peneliti
dapat menghasilkan suatu kesimpulan yang dapat dipertanggung jawabkan secara
ilmiah. Metode penelitian ini mencakup beberapa hal diantaranya adalah
penetapan tempat dan waktu penelitian, penetapan objek penelitian, penetapan
variabel penelitian, metode pengumpulan data, dan teknik analisa data.
3.2. Waktu dan Tempat Penelitian
Tempat penelitian di Laboratorium Konversi Energi Listrik Departemen
Teknik Elektro Fakultas Teknik Universitas Sumatera Utara. Penelitian
dilaksanakan pada tanggal 25 Januari 2014.
3.3. Objek Penelitian
Objek penelitian ini adalah melakukan pengujian perubahan posisi sikat
motor dc shunt tanpa kutub bantu dan perubahan posisi sikat motor dc shunt
dengan kutub bantu.
3.4. Variabel Penelitian
Variabel penelitian adalah objek penelitian atau apa saja yang menjadi titik
1. Motor DC Shunt
2. Posisi Sikat
3. Penambahan Kutub Bantu
3.5. Metode Pengumpulan Data
Metode pegumpulan data dalam suatu penelitian akan sangat menentukan
keberhasilan. Oleh karena itu perlu direncanakan dengan tepat dalam memilih
metode untuk pengambilan data. Metode-metode tersebut adalah :
3.5.1. Metode Dokumentasi
Metode dokumentasi adalah cara memperoleh data melalui hal-hal atau
variabel yang berupa catatan, buku, jurnal, surat kabar, majalah, dan lain-lain.
Adapun dokumentasi yang akan peneliti gunakan adalah data-data yang
berhubungan arus, tegangan, dan putaran.
3.5.2. Metode Observasi
Pengumpulan data dengan observasi langsung atau dengan pengamatan
langsung adalah cara pengambilan data ke tempat penelitian. Dalan hal ini,
penulis langsung berada di lokasi penelitian yaitu di Laboratorium Konversi
Energi Listrik dan mengadakan penelitian mengenai hal-hal yang perlu dicatat
sebagai data dalam penelitian.
3.6. Langkah-Langkah Penelitian
3.6.1. Tahap Persiapan
Tujuannya adalah untuk mengkoordinasikan agar penelitian dapat berjalan
dengan lancar. Langkah-langkah yang dilakukan adalah :
1. Mempersiapkan alat dan bahan untuk penelitian.
2. Mengkondisikan Objek Penelitian
Objek penelitian yang dimaksudkan adalah motor dc shunt, sikat, kutub
bantu, dan beban. Adapun langkah mengkondisikan objek penelitian ini
meliputi :
a. Memastikan bahwa motor dc shunt dapat beroperasi dan mengatur
beberapa posisi sikat, menambahkan kutub bantu, beserta beban.
b. Memeriksa power supply dan multitmeter apakah sudah disetting dengan
benar.
3. Mengkondisikan Alat Ukur
Alat ukur sebagai pengambil data harus memiliki validitas yang baik.
Untuk mendapatkan validitas yang baik alat ukur harus disetting sesuai
dengan seperti skala operasi.
3.6.2. Tahap Pengambilan Data
Tujuan dari tahap ini untuk memperoleh data penelitian yang meliputi arus
dan putaran.
3.7. Teknik Analisa Data
Analisa data merupakan bagian penting dalam pnelitian, karena dengan
memecahkan masalah dan mengambil kesimpulan penelitian. Dalam penelitian
ini, teknik analisa data yang digunakan adalah analisis matematis untuk
mendapatkan hasil penelitian. Analisis ini adalah melakukan
perhitungan-perhitungan berdasarkan rumus yang berlaku di dalam perhitungan-perhitungan efisiensi dan
torsi motor dc shunt.
Setelah melakukan pengukuran, selanjutnya dilakukan analisis untuk
menentukan efisiensi dan torsi pada posisi sikat -300, -200, -100, 00, +100, +200,
+300 dari motor dc shunt tanpa kutub bantu dan motor dc shunt dengan kutub
bantu.
Adapun perhitungan efisiensi dan torsi menggunakan formulasi sebgai
berikut :
1. Motor DC Shunt Tanpa Kutub Bantu
Pin = Vt x IL (Watt)
Prugi-rugi = (Ia)2 x Ra + (Ish)2 x Rsh (Watt)
Pout = Pin– Prugi-rugi (Watt)
Efisiensi (η) = PP
i x %
Torsi (Tsh) = 9,55 x ��� N-m
2. Motor DC Shunt Dengan Kutub Bantu
Pin = Vt x IL (Watt)
Prugi-rugi = (Ia)2 x(Ra + RKB) + (Ish)2 x Rsh (Watt)
Pout = Pin– Prugi-rugi (Watt)
Efisiensi (η) = PP
i x %
Torsi (Tsh) = 9,55 x ��
3.8. Alat Dan Bahan
Pengukuran ini memerlukan alat dan bahan sebagai berikut :
1. Satu unit Generator DC
2. Satu unit Motor DC
3. Kabel penghubung
4. PTDC
5. Multimeter
6. Kutub Bantu
7. Tachometer
3.9. Rangkaian Pengujian
3.9.1. Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu
Adapun rangkaian percobaan yang dilakukan secara umum dapat
ditunjukkan pada Gambar 3.1 sebagai berikut :
A3 A2
[image:47.595.114.515.410.690.2]V1 P T D C 1 AC PTDC 2 AC GA HB GA HB S2 S3 S1 J K RL A1 Rsh -300 -200 -100 +100 +200 +300 00 -+ Bidang Netral Sikat
Gambar 3.1 Rangkaian Pengujian Posisi Sikat Motor DC Shunt Tanpa
3.9.2. Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu
Adapun rangkaian percobaan yang dilakukan secara umum dapat
ditunjukkan pada Gambar 3.2 sebagai berikut :
A3 A2
[image:48.595.115.520.187.510.2]V1
P
T
D
C
1
AC PTDC 2 AC GA HB GA HB S3 J K RL S2 RKB RSH S1 A1 -300 -200 -100 +100 +200 +300 00 -+ Bidang Netral SikatGambar 3.2 Rangkaian Pengujian Posisi Sikat Motor DC Shunt Dengan
Kutub Bantu
3.10. Prosedur Pengujian
3.10.1.Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu
Adapun prosedur percobaannya adalah :
1. Rangkaian dibuat seperti pada Gambar 3.1 dimana semua switch dalam
2. Atur besar RL menjadi 100 Ohm.
3. Atur posisi sikat padap posisi -300.
4. Tutup saklar S2, naikkan PTDC2 sampai 0,64 ampere.
5. Tutup saklar S1, naikkan PTDC1 sampai 50 volt.
6. Catat nilai V1, A1, A2, A3 dan n pada kondisi ini.
7. Turunkan PTDC2 hingga posisi nol lalu turunkan putaran dengan
mengatur PTDC1 hingga posisi nol.
8. Buka saklar S1 dan S2 lalu atur posisi sikat sesuai dengan yang diinginkan.
Kemudian ulangi langkah 3, 4, 5, dan 6 hingga diperoleh data tiap posisi
sudut yang diinginkan.
9. Pengujian selesai.
3.10.2.Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu
Adapun prosedur percobaannya adalah :
1. Rangkaian dibuat seperti pada Gambar 3.2 dimana semua switch dalam
keadaan terbuka dan PTDC dalam keadaan minimum.
2. Atur besar RL menjadi 100 Ohm.
3. Atur posisi sikat padap posisi -300.
4. Tutup saklar S2, naikkan PTDC2 sampai 0,64 ampere.
5. Tutup saklar S1, naikkan PTDC1 sampai 50 volt.
6. Catat nilai V1, A1, A2, A3 dan n pada kondisi ini.
7. Turunkan PTDC2 hingga posisi nol lalu turunkan putaran dengan
8. Buka saklar S1 dan S2 lalu atur posisi sikat sesuai dengan yang diinginkan.
Kemudian ulangi langkah 3, 4, 5, dan 6 hingga diperoleh data tiap posisi
sudut yang diinginkan.
BAB IV
HASIL DAN PEMBAHASAN
4.1. Umum
Motor arus searah adalah suatu mesin listrik yang berfungsi mengubah
energi listrik asrus searah (DC) menjadi energi gerak atau energi mekanik, dimana
energi gerak mekanik tersebut berupa putaran rotor. Proses pengkonversian energi
listrik menjadi energi mekanik tersebut berlangsung di dalam medan magnet.
Motor arus searah penguatan shunt sebenarnya adalah motor arus searah
dimana belitan medannya dihubungkan paralel dengan jangkarnya sehingga arus
yang melalui belitan medan shunt ini tidak sama dengan arus yang mengalir pada
jangkar.
Pada saat motor arus searah penguatan shunt diberi beban maka pada
kumparan stator akan mengalir arus jangkar. Dan arus ini akan menimbulkan
fluksi jangkar yang akan berinteraksi dengan fluksi yang dihasilkan oleh
kumparan medan rotor (fluksi utama). Akibatnya akan terjadi perubahan bentuk
fluksi utama. Pengaruh reaksi jangkar ini akan menyebabkan adanya percikan
bunga api pada sikat-sikat motor.
Percikan ini dikarenakan oleh pergeseran bidang netral magnetik dari motor
tersebut (biasanya dalam keadaan normal garis netral magnetik berimpit dengan
garis netral geometrik).
Untuk mengatasi masalah ini maka diperlukan tiga cara yaitu pergeseran
posisi sikat, penambahan kutub bantu, dan belitan kompensasi. Pada tulisan ini
penguatan shunt, dimana data-data yang diperoleh dari hasil pengukuran yang
dilakukan di Laboratorium Konversi Energi Listrik FT-USU.
Motor yang digunakan pada pengujian ini adalah motor DC AEG tipe Gd
110/110 G-Mot Nr. 7983745 dengan spesifikasi sebagai berikut :
V = 220 V
P = 1,2 kW
IL = 7,1 A
Ish = 0,177 A
Jumlak Kutub = 2
Kelas Isolasi = B
Tahanan Medan Shunt (J-K) = 1,25 kΩ
Tahanan Medan Jangkar (GA-HB) = 3,8 Ω
4.2. Data Pengujian
Vt = 50 Volt
Ra= 3,8 Ω
RL= 100 Ω
[image:52.595.133.492.523.729.2]Rsh= 1250 Ω
Tabel 4.1 Data Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu
Posisi Sikat IL (A) Ia (A) Ish (A) n (rpm)
-300 9,37 9,33 0,04 450
-200 10,6 10,56 0,04 450
-100 11,36 11,32 0,04 350
00 8,78 8,74 0,04 550
+100 5,67 5,63 0,04 550
+200 5,16 5,12 0,04 550
Vt = 50 Volt
Ra= 3,8 Ω
RL= 100 Ω
RKB = 0,6 Ω
[image:53.595.140.485.228.434.2]Rsh= 1250 Ω
Tabel 4.2 Data Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu
Posisi Sikat IL (A) Ia (A) Ish (A) n (rpm)
-300 8,07 8,03 0,04 85
-200 8,02 7.98 0,04 115
-100 7,44 7,40 0,04 150
00 5,95 5,91 0,04 240
+100 4,82 4,78 0,04 240
+200 4,36 4,32 0,04 450
+300 3,93 3,89 0,04 450
4.3. Analisa Data
4.3.1 Pengujian Posisi Sikat Motor DC Shunt Tanpa Kutub Bantu
Dari data-data Tabel 4.1, maka akan dilakukan perhitungan untuk
mendapatkan efisiensi dan torsi.
1. Posisi Sikat -30
Pin = Vt x IL
= 50 x 9,37
= 468,5 Watt
Prugi-rugi = (Ia)2 x Ra + (Ish)2 x Rsh
= 330,78 + 2
= 332,78 Watt
Pout = Pin– Prugi-rugi
= 468,5 – 332,78
= 135,72 Watt
η = PP
i x %
= ,
, x %
= 28,96 %
Tsh = 9,55 x ���
= 9,55 x ,
= 2,88 N-m
Dengan melakukan perhitungan seperti di atas pada tiap posisi sikat, maka
[image:54.595.112.511.541.679.2]akan diperoleh efisiensi dan torsinya seperti pada Tabel 4.3 berikut ini :
Tabel 4.3 Hasil Perhitungan Efisiensi Dan Torsi Posisi Sikat Motor DC Shunt Tanpa
Kutub Bantu
Posisi Sikat IL (A) Ia (A) Ish (A) n (rpm) Efisiensi (%) Torsi (N-m)
-300 9,37 9,33 0,04 450 28,96 2,88
-200 10,6 10,56 0,04 450 19,66 2,21
-100 11,36 11,32 0,04 350 13,46 2,08
00 8,78 8,74 0,04 550 33,42 2,54
+100 5,67 5,63 0,04 550 56,81 2,79
+200 5,16 5,12 0,04 550 60,61 2,71
4.3.2 Pengujian Posisi Sikat Motor DC Shunt Dengan Kutub Bantu
Dari data-data Tabel 4.2, maka akan dilakukan perhitungan untuk
mendapatkan efisiensi dan torsi.
1. Posisi Sikat -30
Pin = Vt x IL
= 50 x 8,07
= 403,5 Watt
Prugi-rugi = (Ia)2 (Ra + RKB) + (Ish)2 x Rsh
= (8,03)2 (3,8 + 0,6) + (0,04)2 x 1250
= 283,71 + 2
= 285,71 Watt
Pout = Pin– Prugi-rugi
= 403,5 – 285,71
= 117,79 Watt
η = PP
i x %
= ,
, x %
= 29,19 %
Tsh = 9,55 x ��
�
= 9,55 x ,
= 13,23 N-m
Dengan melakukan perhitungan seperti di atas pada tiap posisi sikat, maka
Tabel 4.4 Hasil Perhitungan Efisiensi Dan Torsi Posisi Sikat Motor DC Shunt
Dengan Kutub Bantu
Posisi Sikat IL (A) Ia (A) Ish (A) n (rpm) Efisiensi (%) Torsi (N-m)
-300 8,07 8,03 0,04 85 29,19 13,23
-200 8,02 7,98 0,04 115 29,62 9,36
-100 7,44 7,40 0,04 150 34,69 8,21
00 5,95 5,91 0,04 300 47,67 4,51
+100 4,82 4,78 0,04 300 57,45 4,40
+200 4,36 4,32 0,04 450 61,41 2,84
+300 3,93 3,89 0,04 450 65,09 2,71
Dari hasil perhitungan di atas maka didapat perbandingan efisiensi dan torsi
antara motor dc shunt tanpa kutub bantu dengan motor dc shunt dengan kutub bantu
seperti pada tabel 4.5 dan tabel 4.6 sebagai berikut :
Tabel 4.5 Perbandingan Efisiensi Motor DC Shunt Tanpa Kutub Bantu Dengan
Motor DC Shunt Dengan Kutub Bantu
Posisi Sikat Efisiensi (%) Tanpa Kutub Bantu Dengan Kutub Bantu
-300 28,96 29,19
-200 19,66 29,62
-100 13,46 34,69
00 33,42 47,67
+100 56,81 57,45
+200 60,61 61,41
[image:56.595.176.450.498.673.2]Tabel 4.6 Perbandingan Torsi Motor DC Shunt Tanpa Kutub Bantu Dengan Motor
DC Shunt Dengan Kutub Bantu
Posisi Sikat Torsi (N-m) Tanpa Kutub Bantu Dengan Kutub Bantu
-300 2,88 13,23
-200 2,21 9,36
-100 2,08 8,21
00 2,54 4,51
+100 2,79 4,40
+200 2,71 2,84
+300 2,58 2,71
Dari tabel 4.5 dan tabel 4.6 maka akan didapat grafik perbandingan efisiensi
dan torsi motor dc shunt tanpa kutub bantu vs motor dc shunt dengan kutub bantu
yang ditunjukkan oleh Gambar 4.1 dan Gambar 4.2 sebagai berikut :
Gambar 4.1 Grafik Perbandingan Efisiensi Motor DC Shunt Tanpa Kutub
Bantu vs Motor DC Shunt Dengan Kutub Bantu
0 10 20 30 40 50 60 70
-40 -30 -20 -10 0 10 20 30 40
E fi si e n si (%)
Posisi Sikat (Derajat)
[image:57.595.121.504.449.653.2]Gambar 4.2 Grafik Perbandingan Torsi Motor DC Shunt Tanpa Kutub Bantu
vs Motor DC Shunt Dengan Kutub Bantu
0 2 4 6 8 10 12 14
-40 -30 -20 -10 0 10 20 30 40
To
rsi
(
N
-m)
Posisi Sikat (Derajat)
Motor DC Shunt Tanpa Kutub Bantu
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari pembahasan yang telah dibuat, maka diperoleh kesimpulan sebagai
berikut :
1. Pada masing-masing motor DC yang diuji, efisiensi yang tertinggi diperoleh
pada posisi sikat +300 yaitu pada motor DC shunt tanpa kutub bantu sebesar
64,70 %, sedangkan pada motor DC dengan kutub bantu sebesar 65,09 %.
2. Pada masing-masing motor DC yang diuji, torsi yang tertinggi diperoleh pada
posisi sikat -300 yaitu pada motor DC shunt tanpa kutub bantu sebesar 2,88 N-m,
sedangkan pada motor DC dengan kutub bantu sebesar 13,23 N-m.
3. Dari hasil analisa dapat dilihat bahwa ada peningkatan nilai efisiensi dan torsi
setelah ditambahkan kutub bantu.
5.2. Saran
Adapun beberapa saran yang bisa diberikan dari hasil tugas akhir ini adalah :
1. Disarankan untuk menguji pada motor DC lainnya.
BAB VI
DAFTAR PUSTAKA
1. Purba, Richard N. 2010. Analisa Perbandingan Pengaruh Tahanan
Pengereman Dinamis Terhadap Waktu Antara Motor Arus Searah
Penguatan Kompon Panjang Dengan Penguatan Kompon Pendek. Medan:
Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
2. Wijaya, Mochtar. 2001. Dasar-Dasar Mesin Listrik. Djambatan. Jakarta.
3. Siahaan, Ramcheys. 2012. Studi Pengaruh Perubahan Posisi Sikat Terhadap
Efisiensi Motor DC Shunt. Medan: Departemen Teknik Elektro, Fakultas
Teknik, Universitas Sumatera Utara.
4. Metha, V.K, dan Rohit Mehta. 2002. Principles of Electrical Machines. New
Delhi: S. Chand & Company Ltd.
5. Theraja, B.L. 1989. A Text Book of Electrical Technology. New Delhi: Nurja