x
DAFTAR GAMBAR
Gambar 2.1 Konstruksi motor arus searah bagian stator
Gambar 2.2 Konstruksi motor arus searah bagian rotor
Gambar 2.3 Prinsip kerja motor arus searah
Gambar 2.4 Fluksi yang dihasilkan oleh kumparan medan
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan jangkar
Gambar 2.6 Hasil kombinasi antara fluksi medan dan fluksi jangkar
Gambar 2.7 Rangkaian ekivalen motor arus searah penguatan bebas
Gambar 2.8 Rangkaian ekivalen motor arus searah penguatan seri
Gambar 2.9 Rangkaian ekivalen motor arus searah penguatan shunt
Gambar 2.10 Suatu pulley yang berputar karena mengalami suatu gaya
Gambar 2.11 Karakteristik Motor DC Shunt
Gambar 2.12 Karakteristik Putaran – Arus Jangkar Pada Motor DC Shunt
Gambar 2.13 Karakteristik Torsi – Arus Jangkar Pada Motor DC Shunt
Gambar 2.14 Karakteristik Torsi – Putaran Pada Motor DC Shunt
Gambar 3.1 Diagram Aliran Daya pada Motor Arus Searah
Gambar 3.2 Perputaran jangkar di dalam motor dua kutub
Gambar 3.3 (a) Arus pusar di dalam inti jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi
Gambar 4.1 Rangkaian Hopkinson
Gambar 4.2 Rangkaian Pengujian Hopkinson
Gambar 4.3 Roda Pejal
Gambar 4.4 Rangkaian Kontrol
Gambar 4.5 Rangkaian percobaan uji retardasi dengan rotor sendiri tanpa eksitasi
Gambar 4.6 Rangkaian percobaan uji retardasi dengan roda pejal tanpa eksitasi
Gambar 4.7 Rangkaian percobaan uji retardasi dengan rotor sendiri eksitasi penuh
Gambar 4.8 Rangkaian percobaan uji retardasi dengan roda pejal eksitasi penuh
Gambar 4.9 Rangkaian percobaan pengukuran tahanan jangkar
Gambar 4.10 Rangkaian percobaan pengukuran tahanan medan shunt
Gambar 4.11 Rangkaian Pecobaan Pembebanan Motor DC Shunt dengan Metode
iv
ABSTRAK
Motor adalah mesin yang mengubah energi listrik menjadi energi mekanis. Pada motor arus searah energi listrik arus searah diubah menjadi energi mekanis. Dalam menentukan rugi – rugi daya pada motor DC ada beberapa cara pengujian yang dilakukan yaitu uji retardasi, uji hopkinson dan uji swinburne’s.
Uji hopkinson adalah dengan mengkopel dua buah mesin DC shunt yang identik, tetapi salah satu dioperasikan sebagai motor yang lainya jadi generator. Daya out-put dari motor akan memutar generator dan daya output dari generator akan digunakan untuk mensuplai daya input ke motor. Daya listrik dari generator dan daya dari suplai DC akan diumpankan ke motor. Daya listrik yang diberikan ke motor tersebut sebagian besar akan dikonversikan menjadi daya mekanis dan sisanya akan menjadi rugi-rugi motor. Sedangkan uji retardasi adalah suatu pengujian dimana motor yang akan di uji dijalankan pada kecepatan sedikit di atas kecepatan normalnya. Kemudian suplai tegangan dilepas dari jangkar tetapi eksitasi medan tetap dipertahankan. Akibatnya, putaran jangkar semakin menurun dan energi kinetiknya digunakan untuk mengatasi rugi – rugi.
1
BAB I
PENDAHULUAN
I.1 Latar Belakang
Motor DC merupakan mesin listrik yang mengkonversikan energi listrik arus searah menjadi energi mekanik berupa putaran rotor. Sebagai alat pengkonversi energi, tentunya motor DC memiliki suatu nilai efesiensi karena tidak mungkin seluruh energi listrik yang diterima oleh motor diubah menjadi energi mekanik, karena motor DC memiliki tahanan kumparan jangkar, tahanan kumparan medan, tahanan sikat dan kontak sikat, koefesien gesek antara sikat dengan komutator, poros rotor dengan bantalan roda, celah udara, sifat ferromagnetik bahan penyusunan inti jangkar dan lain sebagainya, yang menyebabkan sejumlah energi terbuang ataupun diserap oleh motor selama proses pengkonversian energi tersebut.
Energi yang diserap atau terbuang ini dianggap sebagai rugi-rugi di dalam motor DC. Besarnya nilai rugi-rugi ini diharapkan tidak terlalu besar didalam motor itu sendiri karena akan mempengaruhi efesiensi mesin. Sehingga pada akhirnya akan membatasi performansi dari motor tersebut. Oleh karena itu, nilai rugi-rugi ini perlu diketahui agar dapat ditemukan cara untuk mengurangi nilainya di dalam mesin. Untuk dapat mengetahui nilai rugi-rugi ini, dilakukan suatu pengujian terhadap motor DC tersebut dengan menerapkan metode-metode yang sesuai. Adapun metode pengujiannya adalah metode hopkinson dan metode retardasi.
2
I.2 Tujuan Penulisan
Adapun tujuan utama penulisan Tugas Akhir ini adalah :
1. Untuk memberikan penjelasan tentang penerapan metode hopkinson dalam menentukan rugi – rugi dan efisiensi motor DC shunt.
2. Untuk memberikan penjelasan tentang penerapan metode retardasi dalam menentukan rugi – rugi dan efisiensi motor DC shunt.
3. Untuk memberi penjelasan tentang perbedaan metode hopkinson dengan metode retardasi sehingga dapat diketahui mana yang lebih efektif dan efisien dalam menentukan rugi – rugi dan efisiensi motor DC Shunt.
I.3 Batasan Masalah
Untuk mendapatkan hasil pembahasan yang maksimal, maka penulis perlu membatasi masalah yang akan dibahas. Adapun batasan masalah dalam Tugas Akhir ini adalah : 1. Tidak melibatkan pengaruh kenaikan temperatur dalam perhitungan rugi-rugi dan efesiensi motor.
2. Jenis motor yang digunakan dalam percobaan ini adalah motor DC penguatan shunt 3. Tidak membahas komponen – komponen rugi mekanis dan inti secara rinci dan bagaimana cara menghitungnya.
4. Pengatur tegangan yang digunakan dalam percobaan adalah pengatur tegangan bolak – balik (PTAC) yang akan disearahkan dengan dioda 3 phasa gelombang penuh sehingga menjadi tegangan DC sesuai yang dibutuhkan Motor DC Shunt.
I.4 Metode Penulisan
Karena Tugas Akhir ini merupakan suatu studi aplikasi, maka penulis mencari dan mengumpulkan bahan-bahan dan data-data yang diperlukan melalui :
1. Studi literature : mengambil bahan dari buku-buku referensi, jurnal dan sebagainya. 2. Penelitian : melakukan penelitian di laboratorium Konversi Energi Listrik
3 3. Studi bimbingan : diskusi, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU mengenai masalah-masalah yang timbul selama penulisan Tugas Akhir berlangsung.
I.5 Sistematika Penulisan
Tugas Akhir ini disusun berdasarkan sistematika pembahasan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini merupakan pendahuluan yang berisikan tentang latar belakang masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metode dan sistematika penulisan.
BAB II : MOTOR ARUS SEARAH
Bab ini menjelaskan tentang motor arus searah secara umum, prinsip kerja motor arus searah, jenis-jenis motor arus searah, konstruksi motor arus searah, reaksi jangkar, ggl lawan, pengaturan kecepatan pada motor arus searah penguatan shunt, karakteristik pada motor arus searah penguatan shunt dan persamaan daya dan tegangan pada motor arus searah penguatan shunt.
BAB III : RUGI – RUGI DAN EFISIENSI MOTOR DC
Bab ini menjelaskan tentang pengertian rugi – rugi dan efisiensi secara umum, jenis rugi – rugi, metode penentuan rugi – rugi, jenis – jenis efisiensi dan metode – metode penentuan efisiensi.
BAB IV: PENERAPAN UJI HOPKINSON DAN UJI RETARDASI PADA
MOTOR DC SHUNT
4
BAB V: PERBANDINGAN PENERAPAN UJI HOPKINSON DAN UJI
RETARDASI PADA MOTOR DC SHUNT
Bab ini berisi tentang perbandingan uji hopkinson dengan uji retardasi dari segi metode percobaan, dari segi hasil analisa data percobaan dan dari segi ekonomis.
BAB VI: KESIMPULAN
5
BAB II
MOTOR ARUS SEARAH
II.1 Umum
Motor arus searah adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam (stator) dan bagian yang berputar (rotor).
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet ini menimbulkan suatu gaya sehingga akan menimbulkan momen puntir atau torsi.
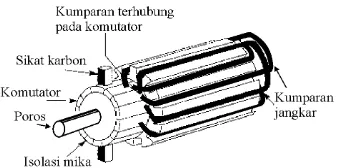
II.2 Konstruksi Motor Arus Searah
Gambar 2.1 di bawah ini merupakan konstruksi motor arus searah.
6
Gambar 2.2 Konstruksi motor arus searah bagian rotor Keterangan dari gambar tersebut adalah :
1.Rangka atau gandar
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin..
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti.
3. Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik.
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama dibentuk dari kumparan pada setiap kutub.
5. Jangkar
Inti jangkar untuk tempat melilitkan kumparan jangkar tempat terbentuknya ggl induksi.
7
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah berfungsi untuk tempat timbulnya torque. Pada motor DC penguatan kompon panjang kumparan medan serinya diserikan terhadap kumparan jangkar, sedangkan pada motor DC penguatan kompon pendek kumparan medan serinya diparalel terhadap kumparan jangkar.
7. Komutator
Komutator merupakan suatu jembatan mekanik yang membuat arus dari sumber mengalir pada kumparan Jangkar. Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit ke dalam silinder yang terpasang pada poros. Di mana tiap-tiap lempengan atau segmen-segmen komutator terisolasi dengan baik antara satu sama lainnya.
8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan sepatu kutub.
II.3 Prinsip kerja Motor Arus Searah
Prinsip dasar di atas diterapkan pada motor DC. Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar 2.3 berikut:
8 Berdasarkan gambar di atas kedua kutub stator dibelitkan dengan konduktor- konduktor sehingga membentuk kumparan yang dinamakan kumparan stator atau kumparan medan. Kumparan medan tersebut dihubungkan dengan suatu sumber tegangan arus searah, maka pada kumparan medan itu akan mengalir arus medan (If). Kumparan medan yang dialiri arus ini akan menimbulkan fluksi utama yang dinamakan fluksi stator. Fluksi ini merupakan medan magnet yang arahnya dari kutub utara menuju kutub selatan (hal ini dapat dilihat dengan adanya garis– garis fluksi). Apabila pada kumparan jangkar mengalir arus yakni arus jangkar, berdasarkan hukum Lorentz kita ketahui bahwa apabila sebuah konduktor yang dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya, maka demikian pula halnya pada kumparan jangkar. Besarnya gaya ini bergantung dari besarnya arus yang mengalir pada kumparan jangkar (I), kerapatan fluksi (B) dari kedua kutub dan panjang konduktor jangkar (l). Semakin besar fluksi yang terimbas pada kumparan jangkar maka besar arus yang mengalir pada kumparan jangkar juga semakin besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B) maka besar gaya yang dihasilkan oleh arus yang mengalir pada konduktor jangkar yang ditempatkan dalam suatu medan magnet adalah :
F = B . I . l Newton………(2.1) Dimana :
I = Arus yang mengalir pada konduktor jangkar (Ampere) B = Kerapatan fluksi (Weber/m2)
9 Maka, besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar z adalah : F =z.B.I..l Newton ………....(2.2)
Dimana :
z = jumlah total konduktor jangkar
Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang besarnya adalah :
Ta =F.r Newton-meter………(2.3)
Maka, Ta = z.B.I.l.d/2 Newton- meter…………(2.4) Dimana:
r = jari –jari rotor d = diameter rotor
Apabila torsi start lebih besar dari pada torsi beban maka kumparan jangkar akan berputar.
II.4 Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, di mana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya 2 hal, yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama. 2. Magnetisasi silang.
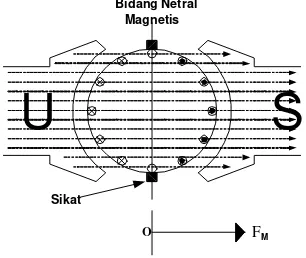
10 kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada Gambar 2.4 berikut ini [6] :
Gambar 2.4 Fluksi yang dihasilkan oleh kumparan medan Dari Gambar 2.4 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis. Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor di mana konduktor bergerak sejajar dengan garis gaya magnet sehingga gaya gerak listrik induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari Gambar 2.4 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan utama, di mana vektor ini tegak lurus terhadap bidang netral magnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul ggm atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada Gambar 2.5 berikut ini
[6] :
U
S
O M
Bidang Netral Magnetis
Sikat
11
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar ditentukan dengan aturan putaran sekrup (cork-screw rule). Besar dan arah garis gaya magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis. Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat dari Gambar 2.6 berikut ini [6] :
U
S
β Bidang netral
magnetis lama
Bidang netral magnetis baru
ω
FA
FM
O
Fr
Gambar 2.6 Hasil kombinasi antara fluksi medan dan fluksi jangkar
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan penurunan
U
S
Bidang Netral Magnetis
O
A
12 kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi-silang (cross-magnetization).
II.5 Jenis-jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis penguatannya, yaitu hubungan rangkaian kumparan medan dengan kumparan jangkar. Sehingga motor arus searah dibedakan menjadi :
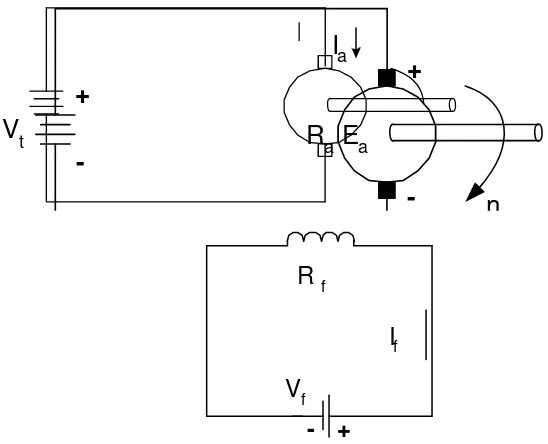
II.5.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber tegangan penguatannya berasal dari luar motor. Di mana kumparan medan disuplai dari sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada gambar di bawah ini:
n Ra
Ia
+
-+
Vt
-Ea
V
If Rf
f
+
13 Dari rangkaian tersebut berdasarkan hukum Kirchoff tentang tegangan diperoleh persamaan:
Vt = Ea + Ia.Ra + Vsikat ………..(2.5) Vf = If . Rf ……….……….…...(2.6) Dimana:
Vt = tegangan terminal jangkar motor arus searah (volt) Ra = tahanan jangkar (ohm)
If = arus medan penguatan bebas (ampere)
Vf = tegangan terminal medan penguatan bebas (volt) Rf = tahanan medan penguatan bebas (ohm)
Ea = gaya gerak listrik motor arus searah (volt) Vsikat = jatuh tegangan pada sikat (volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan. Dan untuk rumus selanjutnya Vsikat ini diabaikan.
II.5.2 Motor Arus Searah Penguatan Sendiri
14
II.5.2.1 Motor Arus Searah Penguatan Seri
Rangkaian ekivalen motor arus searah penguatan seri adalah sebagai berikut:
Gambar 2.8 Rangkaian ekivalen motor arus searah penguatan seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar.
Persamaan - persamaan yang berlaku pada motor arus searah penguatan seri adalah: Vt = Ea + Is.Rs + Ia. Ra ………..(2.7)
Karena, IL= Ia = Is
Maka Vt = Ea + Ia (Ra + Rs) ………(2.8) Dimana :
Is = arus kumparan medan seri (Ampere) Rs = tahanan medan seri (ohm)
IL = arus dari jala – jala (Ampere) Is Rs
n Ra
Ia
+
-+
Vt
15
II.5.2.2 Motor Arus Searah Penguatan Shunt
Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada gambar di bawah:
n Ra
V
t
Ia
+
-IL
Rsh Ish
Ea
n
Gambar 2.9 Rangkaian ekivalen motor arus searah penguatan shunt
Pada motor shunt kumparan jangkar dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar.
Persamaan - persamaan yang berlaku pada motor shunt adalah: Vt = Ea + Ia.Ra ………..……(2.9)
sh
I =
sh t
R V
……….………..(2.10)
IL = Ia + Ish ………...…(2.11) Dimana :
16
II.5.2.3 Motor Arus Searah Penguatan Kompond
II.5.2.3.1 Motor Arus Searah Penguatan Kompond Pendek
Rangkaian ekivalen motor arus searah penguatan kompond pendek
Gambar 2.10 Motor Arus Searah Penguatan Kompond Pendek Persamaan umum motor arus searah penguatan kompond pendek:
IL = Ia + Ish ...(2.12) Vt = Ea + IL. Rsr + Ia.Ra...(2.13) Pin = Vt. IL...(2.14) IL.Rsr = tegangan jatuh pada kumparan seri
(IL)2. Rsr = rugi daya pada kumparan seri
Ia.Ra = tegangan jatuh pada kumparan armatur (Ia)2. Ra = rugi daya armature
n Ra
V
t
Ia
+
-IL
Rsh Ish Rs
Ea
17
II.5.2.3.2 Motor Arus Searah Penguatan Kompond Panjang
Rangkaian ekivalen motor arus searah penguatan kompond panjang
n Ra
V
t
Ia
+
-IL
Rsh Ish
Rs
Ea
n
Gambar 2.11 Motor Arus Searah Penguatan Bebas Persamaan umum motor arus searah penguatan kompond panjang:
IL = Ia + Ish ...(2.15) Vt = Ea + Ia.( Rsr +Ra) ...(2.16) Pin = Vt. IL...(2.17) Vt = Vsh ...(2.18) IL.Rsr = tegangan jatuh pada kumparan seri
(Ia)2. Rsr = rugi daya pada kumparan seri
(Ia)2.Rsh = tegangan jatuh pada kumparan armatur (Ia)2. Ra = rugi daya armature
II.6 Torsi dari Motor DC
II.6.1 Prinsip Dasar
18 bekerja. Gambar 2.10 menunjukkan suatu pulley dengan jari – jari r bekerja suatu gaya F newton yang menyebabkan benda berputar dengan kecepatan n putaran per detik.
Torsi = F x r Newton – meter (N-m).
Usaha yang dilakukan oleh gaya tersebut pada suatu putaran [6] : = gaya x jarak
= F x 2π r Joule ………...…(2.19)
r
F
n putaran/detik
Gambar 2.10 Suatu pulley yang berputar karena mengalami suatu gaya Daya mekanik yang dibangkitkan adalah,
= F x 2π r x n Joule/detik
= (F x r) 2π n Joule/detik ………(2.20) Jika : 2π n = kecepatan sudut (ω)dalam rad/detik
F x r = torsi T, maka daya mekanik yang dibangkitkan = T x ωJoule/detik Pm = T x ωwatt …….…(2.21)
II.6.2 Torsi jangkar dari Motor DC
19 seluruh torsi yang dihasilkan oleh konduktor jangkar dikenal dengan torsi jangkar (Ta). Jika pada suatu motor DC :
r = rata – rata jari – jari jangkar dalam meter
l = panjang efektif masing – masing konduktor dalam meter Z = jumlah total konduktor jangkar
i = arus dalam setiap konduktor = Ia/A dalam ampere B = rapat fluks rata- rata dalam weber/meter2
φ = fluks per kutub dalam weber P = jumlah kutub
Maka gaya pada setiap konduktor seperti persamaan 2.2.
Torsi yang dihasilkanoleh suatu konduktor seperti pada persamaan 2.4. Torsi jangkar, Ta = Z F r Newton-meter
Ta = Z B i l Newton-meter (2.22) Sekarang i = Ia/A, B = φ/a dimana a adalah luas penampang jalur fluks per kutub pada
jari – jari r. jelasnya, a = 2π r p 1
Maka Ta = Z x lxr
A I a
a ×
×( ) )
(φ ….(2.23)
= Z x lxr
A I a
a ×
×( ) ) (φ
=
A P I
Z a
π φ
2 N-m
Atau Ta = 0,159 ( )
A P
ZIaφ Nm ….(2.24)
20 Ta ~ φ Ia
Karena itu torsi didalam motor DC berbanding langsung dengan fluks per kutub dan arus jangkar. Untuk motor DC shunt, besarnya fluks φ relative konstan sehingga :
Ta ~ Ia...…...(2.25) Ekspresi lainnya untuk menyatakan besarnya torsi jangkar yaitu :
Ea =
A zn P
60 φ
...….(2.26)
A
zn Pφ
=
n Ea
×
60
Dari persamaan (2.24) di atas diperoleh persamaan untuk Ta yaitu [6]
Ta = 0,159 x
× n
Ea
60
x Ia
Atau Ta = 9,55 x
n I Ea × a
N-m...(2.27)
II.6.3 Torsi Poros dari Motor DC
Torsi yang dapat dimanfaatkan pada poros motor untuk melakukan usaha yang berguna dikenal dengan torsi poros. Ini dilambangkan dengan Tsh. Torsi total yang dibangkitkan didalam jangkar motor tidak semuanya dapat digunakan pada poros karena sebagiannya hilang untuk mengatasi rugi – rugi besi dan gesek didalam motor. Dengan demikian, torsi poros Tsh lebih kecil nilainya dibandingkan torsi jangkar Ta. Selisih Ta - Tsh disebut rugi – rugi torsi (torque losses).
Jelasnya, Ta - Tsh = 9,55 x
n
gesek rugibesi
Rugi− +
...(2.28)
Tsh dapat dihitung dengan cara sebagai berikut [6]:
21
Sehingga Tsh =
60 / 2 Watt dalam keluaran Daya n
π N-m
Atau Tsh=
n Watt dalam keluaran Daya 55 ,
9 × N-m...(2.29)
II.7 Pengaturan Kecepatan Pada Motor Arus Searah
Sebagaimana telah diketahui bahwa di dalam motor DC berlaku persamaan [2] : Ea = Vt – IaRa
Dimana Ea = A 60 n Z PΦ Sehingga A 60 n Z PΦ
= Vt – IaRa...(2.30)
Atau n =
(
)
PZ A R I
Vt a a 60
Φ −
Atau n = K
(
)
Φ − a a
t IR
V
di mana K = PZ
A 60
...(2.31)
Tetapi Vt – IaRa = Ea
Maka n = K
Φ
a
E
Atau n ~
Φ
a
E
...(2.32)
Dimana : T = torsi (Newton – meter)
K = konstanta (bergantung pada ukuran fisik motor)
φ = fluksi setiap kutub (Weber)
a
22 P = jumlah kutub
Z = jumlah konduktor A = cabang paralel
Dengan demikian pada motor DC , kecepatan berbanding lurus dengan GGL balik Ea dan berbanding terbalik dengan fluks per kutub Φ.
Umumnya pada setiap motor, torsi dan kecepatan merupakan faktor yang sangat penting. Ketika torsi meningkat, kecepatan motor akan berkurang dan sebaliknya. Telah diketahui bahwa untuk motor DC berlaku [6] :
n = K
(
)
Φ − a a
t IR
V
= K
Φ
a
E
Ta ~ φ Ia
Jika fluks berkurang, dari persamaan (2.32), kecepatan motor akan meningkat tetapi dari persamaan (2.24), torsi motor berkurang. Hal ini tergantung dari sisi mana kita menganalisanya. Memang begitu didalam kasus ini. Ketika fluks berkurang sedikit, arus jangkar menjadi semakin besar. Begitu juga sebaliknya, karena adanya pelemahan medan, torsi meningkat sesaat ke suatu nilai yang cukup tinggi bahkan melebihi torsi beban motor. Kelebihan torsi tersebut menyebabkan motor mengalami percepatan dan GGL lawan juga meningkat. Kecepatan motor yang stabil akhirnya dicapai ketika GGL lawan telah telah meningkat sampai ke suatu nilai dimana arus jangkar
(
)
23
II.8 Karakteristik Motor Arus SearahPenguatan Shunt
Karakteristik dari suatu motor layak diketahui, karena karakteristik dari suatu motor akan mencerminkan performansi (unjuk kerja) dari motor listrik tersebut selama kondisi operasinya. Pada motor arus searah penguatan shunt terdapat tiga karakteristik yakni antara lain: Karakteristik Torsi dan Arus Jangkar, Karakteristik Putaran dan Arus Jangkar, dan Karakteristik Torsi dan Putaran. Persamaan dasar motor DC adalah
m m a a ZP a ZP E φω π π ω φ 2 2 . = =
Ea =Kaφωm
a ZP Ka π
2 =
Sebagaimana telah diketahui
(
a a)
m
e E I
T 1 .
ω = = a e I a ZnP n T . 2 1 φ π a e I a PZ
T . .
2π φ =
a a
e K I
24
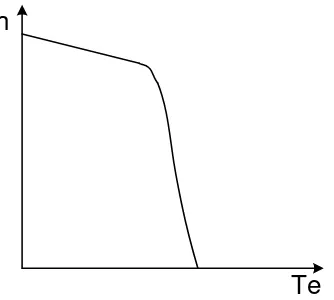
n
Te
Gambar 2.11 Karakteristik Motor DC Shunt
Pada motor DC emf yang timbul dalam jangkar dinamakan back emf atau counter emf. Untuk motor DC, tegangan sumber atau suplai selalu tetap.
Pada motor DC shunt untuk tegangan suplai konstant maka If juga konstant. Pada Arus Jangkar Ia yang kecil pengaruh demagnetisasi dari reaksi jangkar biasanya dapat diabaikan sehingga besar fluksi pada celah udara tidak terpengaruh. Untuk Ia yang besar pengaruh demagnetisasi dari reaksi jangkar akan mengurangi besar fluksi celah
udara sedikit.
φ ω
a a m
K E =
a a t
a V I R
E = −
φ ω
a a a t m
K R I V −
= ...(2.33)
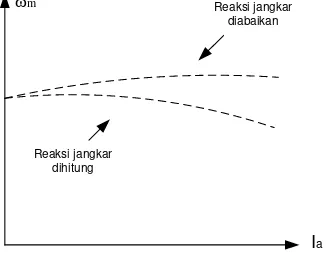
II.8.1 Karakteristik Putaran – Arus Jangkar ( n/ Ia )
Untuk Motor Arus Searah berlaku : Ea = Vt - IaRa
25 Maka Ka.φ.ω = Vt - IaRa
Dimana φ≈ If
Dengan harga If yang konstan maka Ka, φ, Vt dan Ra merupakan konstanta sehingga diperoleh
φ ω
a a a t m
K R I V − =
Dengan Vt dan If yang konstan maka kecepatan putaran motor hanya dipengaruhi oleh perubahan IaRa drop dan dipengaruhi oleh demagnetisasi dari reaksi jangkar. Dengan bertambahnya Ia, maka pengaruh dari demagnetisasi reaksi jangkar akan bertambah besar yang akan berkurangnya besar fluksi medan penguatan maka kecepatan motor akan bertambah besar. Tetapi dengan bertambahnya Ia, maka besar IaRa akan bertambah sehingga besar Vt - IaRa akan berkurang, akibatnya terjadi pengurangan besar fluksi medan maka putaran motor DC shunt akan berkurang,dengan bertambah besarnya Ia akan jatuh (berkurang) sedikit dari ωmo = kecepatan putaran pada beban nol. Karena pada beban nol Ia sama dengan kecil sekali,maka :
φ ω
a t m
K V =
0 ...(2.34)
Dan pada kasus bila pengaruh reaksi jangkar diabaikan maka :
φ ω
a a a t m
K R I V −
= ...(2.35)
26
Reaksi jangkar diabaikan
Reaksi jangkar dihitung
Ia
ωm
Gambar 2.12 Karakteristik Putaran – Arus Jangkar Pada Motor DC Shunt
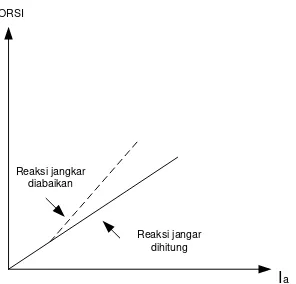
II.8.2 Karakteristik Torsi – Arus Jangkar ( T/ Ia )
Dari rumus Te = K.φm. Ia menunjukkan jika fluksi φm adalah konstan ( pada motor DC shunt),
27 Reaksi jangkar diabaikan Reaksi jangar dihitung Ia TORSI
Gambar 2.13 Karakteristik Torsi – Arus Jangkar Pada Motor DC Shunt
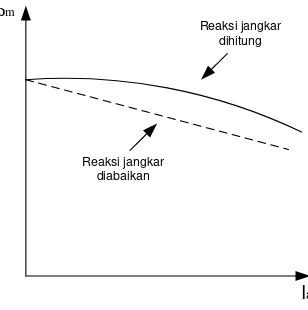
II.8.3 Karakteristik Torsi – Putaran ( T/n )
Karakteristik putaran torsi disebut juga sebagai karakteristik mekanik dan pada kondisi steady state (nominal) dapat diperoleh sebagai berikut :
φ ω a a m K E
= sedangkan Ea =Vt −IaRa
Maka φ ω a a a t m K R I V − = ...(2.37)
Tetapi Te =Ka.φ.Ia sehingga φ a e a K T I =
Substitusikan harga Ia ke dalam persamaan (2.36) :
φ ω a a a t m K R I V − =
Sehingga
28
2 2
0 φ
ω ω
a e a m m
K T R −
= ...(2.38)
Maka dapat dilihat dengan pertambahan Te kecepatan putaran akan turun. Sehingga untuk Te lebih besar, Ia lebih besar dibutuhkan, sehingga akan mengurangi besar fluksi celah udara (φ) yang disebabkan karena kejenuhan dan reaksi jangkar. Maka dengan Te
bertambah maka φ akan berkurang. 2
φ e
T
bertambah dengan perbandingan yang lebih
cepat dan putaran dari motor akan turun lebih cepat dibandingkan dengan kenaikan torsi mesin seperti diperlihatkan gambar di bawah ini. Jika pengaruh reaksi jangkar diabaikan maka (Ka.φ)2 nilainya konstan sehingga kecepatan putaran akan berkurang dengan lambat seiring Pertambahan Te [4]:
Reaksi jangkar dihitung
Reaksi jangkar diabaikan
Ia
[image:30.612.220.383.379.506.2]ωm
29
BAB III
RUGI – RUGI DAN EFISIENSI MOTOR DC
III.1 Rugi – Rugi Motor Arus Searah
III.1.1 Umum
Motor DC menerima daya masukan berupa energi listrik dan menghasilkan daya keluaran berupa energi mekanis. Akan tetapi, tidak seluruh daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada yang dikonversikan menjadi panas dan ada yang diserap oleh mesin untuk mengatasi gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi daya dalam bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan kenaikan temperatur motor yang dapat merusak isolasi, mempercepat berkurangnya umur ekonomis motor sehingga membatasi daya keluaran motor. Berikut ini proses pengkonversian energi pada motor DC shunt dalam diagram aliran daya di bawah ini [3] :
Daya input V.IL Watt
Rugi-rugi tembaga
Daya mekanis yang dibangkitkan
di dalam jangkar Ea.Ia Watt
Daya output motor Tshaft.ω Watt
Rugi-rugi besi dan mekanis
[image:31.612.128.481.506.615.2]Energi Listrik Energi Mekanis
30 Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam persamaan dinyatakan dengan :
Σ Rugi-Rugi = Daya Masukan – Daya Keluaran...(3.1) Akhirnya, rugi-rugi di dalam motor DC didefinisikan sebagai selisih daya antara daya masukan yang diterima motor dengan daya keluaran yang dapat dihasilkannya dimana selisih daya tersebut berubah menjadi bentuk energi yang lain yang tidak dapat digunakan bahkan dapat merugikan bagi motor itu sendiri.
III.1.2 Jenis Rugi – Rugi Di Dalam Motor Arus Searah
III.1.2.1 Rugi-Rugi Tembaga (Copper losses)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam kumparan medan dan kumparan jangkar motor. Karena kawat tembaga kedua kumparan tersebut memiliki nilai resistansi Rf dan Ra, maka jika mengalir arus DC sebesar If dan Ia akan menyebabkan kerugian daya yang dihitung dengan persamaan :
Pa = Ia2Ra………....…...….……. .(3.2) dan
Pf = If2Rf………..…..…...……..(3.3) Di mana : Pa = rugi tembaga kumparan jangkar
Pf = rugi tembaga kumparan medan
31
III.1.2.2 Rugi-Rugi Inti (core or iron losses)
Rugi-rugi inti terjadi di dalam jangkar motor DC yang disebabkan oleh perputaran jangkar di dalam medan magnet kutub-kutubnya. Ada dua jenis rugi-rugi inti yaitu (1) rugi hysteresis dan (2) rugi arus pusar.
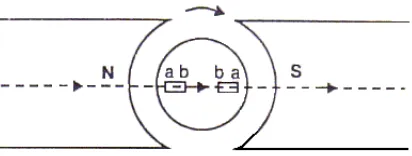
1). Rugi Hysteresis
[image:33.612.205.411.313.391.2]Rugi hysteresis terjadi di dalam jangkar mesin DC karena setiap bagian jangkar dipengaruhi oleh pembalikan medan magnetik sebagaimana bagian tersebut lewat di bawah kutub-kutub yang berurut.
Gambar 3.2 Perputaran jangkar di dalam motor dua kutub
Gambar 3.2 menunjukkan jangkar yang berputar di dalam motor dua kutub. Dengan menganggap ab sebagai potongan kecil dari jangkar. Ketika potongan ab berada di bawah kutub N, garis-garis magnetik lewat dari a ke b. Setengah perputaran selanjutnya, dari potongan besi yang sama berada di bawah kutub S dan garis-garis magnetik lewat dari b ke a sehingga sifat magnet di dalam besi dibalik.
32 Ph = ηB1max,6 fV Watt………...(3.4)
Dimana : Ph = rugi hysteresis
Bmax = rapat fluks maksimum di dalam jangkar f = frekuensi pembalikan magnetik
= 120
P n
dimana n dalam rpm dan P = jumlah kutub
V = volume jangkar dalam m3 η = koefisien hysteresis Steinmentz
2). Rugi Arus Pusar
[image:34.612.96.489.90.291.2]Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor jangkar, ada juga tegangan yang diinduksikan di dalam inti jangkar. Tegangan ini menghasilkan arus yang bersirkulasi di dalam inti jangkar seperti yang ditunjukkan dalam Gambar 3.3. Ini disebut sebagai arus pusar (eddy current) dan daya yang hilang karena alirannya disebut dengan rugi arus pusar.
33
[image:35.612.130.486.79.172.2]
(a) (b)
Gambar 3.3 (a) Arus pusar di dalam inti jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi
III.1.2.3 Rugi-Rugi Mekanis (mechanical losses)
Rugi-rugi mekanis di dalam motor DC merupakan rugi-rugi yang berhubungan dengan efek-efek mekanis. Ada dua bentuk dasar rugi-rugi mekanis di dalam motor DC yaitu gesekan dan angin.
Rugi-rugi gesekan adalah rugi-rugi yang disebabkan oleh pergesekan antara permukaan bagian-bagian yang berputar dengan bagian-bagian yang diam dari motor, diantaranya gesekan bearing atau bantalan peluru dengan rumah bearing atau dengan as rotor. Juga gesekan antara permukaan sikat dengan komutator. Karena adanya suatu nilai koefisien gesek antara permukaan bagian-bagian tersebut, walaupun kecil, diperlukan gaya untuk mengimbangi gaya lawan akibat koefisien gesek tersebut jika ingin menggerakkan rotor motor DC tersebut.
34
III.1.2.4 Rugi – rugi sikat (brush losses)
Jika kumparan jangkar motor DC dialiri arus listrik DC maka sikat-sikatnya juga akan dialiri arus yang sama. Karena sikat memiliki nilai resistansi sikat dan juga tahanan kontak antara permukaan sikat dengan komutator maka terdapat rugi jatuh tegangan pada sikat yang dinyatakan dengan Vbd. Jatuh tegangan sikat ini menyebabkan timbulnya rugi-rugi daya sebesar :
Pbd = Vbd.Ia………..…...……....(3.5)
Dimana : Pbd = rugi daya akibat jatuh tegangan sikat Ia = arus jangkar Vbd = jatuh tegangan sikat
Besarnya nilai jatuh tegangan sikat-sikat pada motor DC hampir konstan dalam rentang arus jangkar yang besar. Maka rugi – rugi sikat dapat dihitung dengan persamaan:
Pbd = 2 x Ia ………...…..…...(3.6)
III.1.2.5 Rugi-Rugi Beban Stray (stray load load losses)
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan oleh arus pusar di dalam tembaga dan rugi-rugi inti tambahan di dalam besi, yang timbul karena pendistorsian fluks magnetik oleh arus beban (tidak termasuk yang disebabkan oleh jatuh tegangan IR) dan rugi-rugi hubung singkat komutasi.
35 Rugi-rugi di dalam motor DC di atas juga dapat dikelompokkan menjadi dua kelompok yaitu :
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor DC yang nilainya selalu tetap, tidak tergantung pada arus pembebanan. Rugi – rugi inti + mekanis disebut dengan rugi – rugi rotasi.Yang termasuk ke dalam kelompok rugi-rugi konstan adalah :
a. Rugi-rugi inti yaitu rugi-rugi hysteresis dan arus pusar b. Rugi-rugi mekanis yaitu rugi-rugi gesek dan angin c. Rugi-rugi tembaga medan shunt.
2. Rugi-rugi variabel yaitu rugi-rugi di dalam motor DC yang nilainya bervariasi terhadap arus pembebanan.Yang termasuk ke dalam kelompok rugi-rugi ini adalah : a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra)
b. Rugi-rugi tembaga kumparan medan seri (Ia2Rse) c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam motor DC adalah :
Σ Rugi – Rugi = Rugi Konstan + Rugi Variabel……...(3.7)
III.1.3 Penentuan Rugi-Rugi Di Dalam Motor Arus Searah
III.1.3.1 Umum
36 pengujian rugi-rugi terhadap motor DC tersebut. Dari hasil pengujian rugi-rugi ini dapat diketahui besarnya nilai rugi-rugi di dalam motor dengan lebih spesifik.
Tetapi tidak semua rugi-rugi di dalam motor DC dapat diketahui dari hasil pengujian tersebut, karena terdapat rugi-rugi tambahan di dalam motor DC yang tidak dapat diukur. Rugi-rugi tambahan itu disebut dengan rugi-rugi stray. Nilainya dinyatakan sebesar 1% dari daya keluaran motor. Nilai ini merupakan nilai konvensi yang telah disepakati secara umum.
III.1.3.2 Penentuan Rugi-Rugi Konstan Motor Arus Searah
Untuk mengetahui nilai rugi – rugi konstan di dalam motor DC ada beberapa metode pengujian yang dapat dilaksanakan yaitu:
1. Pengujian dengan Metode Swinburne’s diantaranya : a. Penentuan tahanan panas belitan motor DC
b. Penentuan rugi – rugi konstan motor DC dengan menjalankan motor dalam keadaan tanpa beban lalu kecepatan motor diatur pada kecepatan nominalnya dengan mengatur arus medan motor. Dengan mengetahui rugi – rugi tembaga jangkar dan daya input maka nilai rugi – rugi konstan motor dapat ditentukan.
37
III.1.3.3 Penentuan Rugi-Rugi Variabel Motor Arus Searah
Sebagaimana telah disebutkan di atas bahwa rugi-rugi variabel tergantung pada pembebanan motor. Seiring dengan pertambahan beban motor maka arus pembebanan (Ia) pada pada motor juga akan meningkat. Karena rugi-rugi tembaga kumparan jangkar, kumparan medan seri dan rugi jatuh tegangan sikat tergantung pada besarnya arus beban, maka rugi-rugi ini akan bertambah dengan meningkatnya arus pembebanan di dalam motor.
Oleh karena itu, dengan mengetahui nilai tahanan kumparan jangkar, tahanan kumparan medan seri dan jatuh tegangan sikat serta besarnya arus pembebanan, rugi-rugi variabel dapat ditentukan dengan perhitungan menggunakan persamaan rugi-rugi variabel di atas.
III.2 Efisiensi Motor Arus Searah
III.2.1 Umum
Daya masukan yang diterima oleh motor DC berupa daya listrik sedangkan daya keluaran yang dihasilkannya berupa daya mekanik yaitu gerak rotor dan hasil selisih antara daya masukan dengan daya keluaran motor disebut rugi – rugi. Dengan demikian, efisiensi suatu motor DC diperoleh dengan :
Efisiensi = x100% P
P
in out
...(3.8)
dimana, Pin = Daya Masukan
Pout = Daya Keluaran
38 Dan, Pin = Pout + Σ Rugi-Rugi...(3.10)
Maka, efisiensi motor DC dapat juga ditunjukkan dalam bentuk sebagai berikut :
Efisiensi =
in in
P
rugi rugi
P −
∑
−...(3.11)
Efisiensi =
∑
− + rugi rugi PP
out
out
...(3.12)
Metode yang paling nyata dalam menentukan efisiensi motor DC adalah membebaninya langsung dan mengukur daya masuk dan keluarannya. Maka kita dapat menggunakan persamaan (3.6) untuk menentukan efisiensi motor tersebut. Namun, metode ini harus memperhatikan tiga hal utama yaitu metode ini membutuhkan pembebanan pada motor. Kedua, untuk motor – motor dengan rating daya yang besar, beban – beban yang diperlukan tidak mungkin diperoleh. Ketiga, bahan lebih mustahil untuk memberikan beban yang sedemikian rupa, karena daya yang besar akan terbuang menjadikan metode ini sangat mahal.
Metode yang paling umum untuk mendapatkan efisien si motor DC adalah menentukan rugi – ruginyadari pengukuran daya masukan dan keluarannya pada saat berbeban. Kita dapat menggunakan persamaan (3.9) untuk menentukan efisiensi motor tersebut. Metode ini memiliki keuntungan yang nyata karena lebih mudah dan ekonomis.
III.2.2 Jenis-Jenis Efisiensi Motor Arus Searah
Efisiensi yang dinyatakan dalam persamaan 3.8 di atas disebut pula sebagai efisiensi komersial atau efisiensi keseluruhan. Selain itu dalam motor DC dikenal juga dua macam efisiensi lainnya, yaitu :
39 ηm = x100%
P P
konversi out
………...….……(3.14)
di mana : Pout = Tshaft x ω Pkonversi = Ea x Ia
Pkonversi adalah daya yang dibangkitkan pada kumparan jangkar. 2. Efisiensi Elektris
ηe =
in konversi
P P
x 100%...(3.15)
di mana : Pin = V x IL
Dari persamaan-persamaan di atas terlihat bahwa :
40
BAB IV
PENERAPAN UJI REGENERATIF (HOPKINSON) DAN UJI RETARDASI
PADA MOTOR DC SHUNT
IV.1 Penerapan Uji Hopkinson Dalam Menentukan Rugi – Rugi dan Efisiensi
Motor DC Shunt
IV.1.1 Prinsip Dasar
Metode ini merupakan sederhana untuk menentukan rugi-rugi dan efisiensi mesin DC yang beroperasi dengan kecepatan konstan. Dengan menjalankan metode ini, maka akan dapat diketahui rugi-rugi besi,tembaga jangkar dan mekanis (gesek dan angin) dari mesin yang diuji. Selanjutnya dengan mengetahui rugi-rugi tersebut pada saat berbeban, efisiensi mesin
dapat dihitung pada saat pembebanan tersebut.
Motor arus searah dan generator arus searah (diusahakan keduanya memiliki parameter yang identik) dikopel secara mekanis. Pada uji energy yang dihasilkan generator tidak dibuang percuma, melainkan diumpankan ke penguat medan kedua mesin tersebut.
41
J
+
-+
-K
S
IML
IMsh
J
K
IGL
V 2
IMa IGa
IGL IML
+
-V1
n
R
RM
G
Ma RGa
L Ga L
Ma
Mfsh
R
R
GfshI
Gsh [image:43.612.152.524.79.261.2]Rangkaian hubungan Hopkinson dapat dilihat pada Gambar 4.1 di bawah ini :
Gambar 4.1. Rangkaian Hopkinson
Dari Gambar (4.1) di atas, jika V1 adalah tegangan supplai, maka : Daya Masukan Motor : V1 . (IGL + IML)
Daya Keluaran Generator : V1 . IGL
Ada dua asumsi dalam menentukan efisiensi mesin :
(a) Dengan mengasumsikan kedua mesin memiliki efisiensi (η) yang sama.
(b) Dengan mengasumsikan rugi-rugi inti, gesek, dan angin pada kedua mesin sama.
(a) Dengan mengasumsikan kedua mesin memiliki efisiensi (η) yang sama
Output motor = η x input motor = ηV1(IGL+IML) = input Generator
Output Generator = η x input Generator = η x ηV1(IGL+IML) = η2V(IGL+IML) Tetapi output Generator adalah V1IGL
η2
V(IGL+IML) = V1IGL
atau
ML GL
GL
I I
I + =
42 persamaan ini memberikan nilai efisiensi cukup akurat untuk tes sederhana. Akan tetapi jika ketelitian yang diperlukan, maka efisiensi kedua mesin dapat dihitung secara terpisah seperti dibawah ini.
(b) Dengan mengasumsikan rugi-rugi inti, gesek, dan angin pada kedua mesin
sama
Karena kedua mesin adalah identik (sama), maka kita dapat mengasumsikan bahwa rugi-rugi besi, rugi-rugi gesek dan rugi-rugi angin kedua mesin adalah juga sama. Dengan mengasumsikan hal tersebut maka akan didapat nilai rugi-rugi besi, angin, gesek.dan juga efisiensi dari masing-masing mesin.
Dari Gambar (4.1) di atas, daya yang diambil dari supplai DC adalah V1.IML dan sebanding dengan total rugi-rugi motor dan generator.
V1.IML = Rugi-rugi total motor dan generator
Jika kita mengurangi rugi-rugi jangkar,rugi-rugi tembaga kumparan jangkar dan rugi-rugi tembaga medan shunt kedua mesin dari V1.IML maka kita akan memperoleh rugi-rugi besi, rugi-rugi gesek dan rugi-rugi angin kedua mesin. Sehingga dapat dituliskan bahwa rugi-rugi besi, rugi-rugi gesek dan rugi-rugi angin kedua mesin adalah sebagai berikut :
Wm&g = V1.IML – {( IGL+IGsh )2. Ra + ( IGL+IML-IMsh )2. Ra + V1.IGsh + V1.IMsh} .... (4.1) dimana : Ra = Tahanan jangkar masing-masing mesin, Ra = Rma = RGa
IGsh = Arus medan generator IMsh = Arus medan motor
43 V1.IGsh = Rugi-rugi tembaga medan shunt generator
V1.IMsh = Rugi-rugi tembaga medan shunt motor V1.IML = Tegangan suplai DC
Ra = Rma = RGa
Maka rugi-rugi besi, gesek dan angin masing-masing mesin adalah : Wm&g / 2
Dalam pengujian ini, rugi-rugi motor dan rugi-rugi generator dapat ditulis sebagai berikut:
Untuk Motor
Input Motor = V1 . (IGL + IML)
Total Rugi-Rugi Motor = (IGL+IML-IMsh)2. Ra + V1.IMsh + Wm&g / 2 ... (4.2)
(
)
(
)
100%% 100 1 1 × + − + = × ∑ − = ML GL m ML GL in in m I I V W I I V P rugi P
η ………..…………...……(4.3)
Untuk Generator
Output Generator = V1 . IGL
Total Rugi-Rugi Generator = (IGL+IGsh)2. Ra + V1.IGsh + Wm&g / 2 ... (4.4)
% 100 % 100 1 1 × + = × + = g GL GL g out out g W I V I V W P P
η ………..…(4.5)
44 akan menjadi rugi-rugi motor. Daya mekanis yang dihasilkan motor tersebut akan disuplaikan (diumpankan) ke generator untuk memutar generator. Daya listrik dari generator akan disuplaikan (diumpankan) ke motor kecuali beberapa yang terbuang sebagai rugi-rugi dalam generator. Dengan demikian daya listrik yang diambil dari supply DC tersebut adalah merupakan jumlah rugi-rugi motor dan rugi-rugi generator, dan hal ini dapat diukur dengan menggunakan bantuan alat ukur (Voltmeter dan Ammeter).
IV.1.2 Peralatan yang Digunakan dalam Pengujian
Peralatan yang digunakan dalam pengujian ini terdiri dari : a. Mesin DC sebagai motor
TYP Gd 110/110 G-Mot Nr. 7983733 Tegangan nominal = 220 V
P = 1,2 KW IL =7,1 A Ish= 0,175 A n = 1400 rpm
b. Mesin DC sebagai generator
TYP Gd 110/110 G-Mot Nr. 7983745 Tegangan nominal = 220 V
45 n = 1400 rpm
c. Dua Buah Voltmeter DC
d. Empat Buah Ampere meter DC e. Satu Buah Rpm meter
f. Sepuluh Buah tahanan geser, masing-masing 25 ohm g. Satu buah Power supply
h. Dudukan mesin i. Satu buah Kopel mesin
IV.1.3 Rangkaian Pengujian
[image:47.612.99.561.424.603.2]Pengujian Hopkinson yang dilakukan di Laboratorium Konversi Energi Listrik Fakultas Teknik USU dengan menggunakan rangkaian pengujian seperti yang terlihat pada Gambar 4.2 di bawah ini.
Gambar 4.2. Rangkaian Pengujian Hopkinson
S 1
J
+
-V1
+
-K
S
IML
IMsh
J
K
IGL
V
2
IMa IGa
IGL
IML
+
-n
R R
M G
Ma
R Ga L
Ga L
Ma
Mfsh RRGfsh
IGsh
P T A C R
S
T
46
IV.1.4 Prosedur Pengujian
Prosedur Pengujian Hopkinson ini adalah sebagai berikut: 1. Rangkaian percobaan disusun seperti Gambar 4.2 diatas :
2. Untuk menjalankan motor, tutup saklar S1 kemudian atur tahanan medan pada posisi minimum. Setelah itu sumber tegangan DC yaitu V1 yang digunakan untuk mensuplai tegangan, dinaikkan perlahan-lahan sehingga motor mulai berputar.
3. Kemudian atur medan penguatnya sampai motor mencapai putaran nominalnya. 4. Setelah motor berputar pada putaran nominalnya kemudian atur penguat medan generator sampai V2 terbaca NOL. ini berarti tegangan generator dan tegangan supplay sudah sama.
5. Pada saat V2 sudah terbaca NOL tutup saklar S2, sehingga mulai saat itu motor dan generator arus searah akan bekerja secara paralel.
6. Setelah mesin bekerja paralel, atur medan generator (RGfsh) sehingga tegangan generator berubah, supaya arus IGL mengalir ke input motor. Kemudian catat nilai-nilai IGL,IML, IGsh, IMsh, dan nilai V1.
7. Lakukan hal yang sama dengan langkah 6, dimana nilai arus medan motor (IMsh) dan generator (IGsh) diubah-ubah (bervariasi). Percoban dilakukan empat kali.
IV.1.5 Data Pengujian
Adapun data yang diperoleh dari pengujian Hopkinson yang dilakukan adalah sebagai berikut :
47 Tahanan jangkar kedua mesin = 3,7 ohm
No V1(volt) V2 (volt) IGL (A) IML (A) IGsh (A) IMsh (A)
1 220 0 1 0,8 0,19 0,16
2 220 0 2,3 1,33 0,19 0,18
3 220 0 3,7 1,73 0,18 0,17
[image:49.612.123.491.94.225.2]4 220 0 4,8 2,34 0,18 0,17
Tabel 4.1. Data Hasil Pengujian Hopkinson.
IV.1.6 Analisa Pengujian
Dengan mengetahui data tersebut maka pada analisa data berikut akan diketahui besar nilai rugi-rugi dan efisiensi.
1. Untuk IGL = 1 Amper
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V1.IML – {( IGL+IGsh )2. Ra + ( IGL+IML-IMsh )2. Ra + V1.IGsh + V1.IMsh}
= 220.0,8 –{(1 + 0,19)2. 3,7+(1+0,8-0,16)2. 3,7+220.0,19+220 . 0,16} = 176 – ( 5,24 + 9,95 + 41,8 + 35,2 )
= 83,8 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 41,90 Watt Daya masuk ke motor = V1 . ( IGL+IML )
= 220 . ( 1 + 0,8 )
= 396 watt
48 Efisiensi Motor (ηm)
(
)
(
)
100%% 100 1 1 × + − + = × ∑ − = ML GL m ML GL in in m I I V W I I V P rugi P η
(
)
(
)
396 100% 0,7805 , 87 396 % 100 8 , 0 1 220 05 , 87 8 , 0 1
220 × = − × =
+ − + = m η
= 0,78 x 100% = 78% Daya keluaran generator = V1 . IGL
= 220 . 1
= 220 Watt
- Total rugi-rugi generator = (IGL+IGsh)2. Ra + V1.IGsh + Wm&g /2 = (1 + 0.19)2. 3,7 + 220.0.19 + 41,90 = 5,24 + 41,8 + 41,90
- jadi, Wg (total rugi-rugi generator) = 88,94 Watt Efisiensi Generator (ηg)
% 100 % 100 1 1 × + = × + = g GL GL g out out g W I V I V W P P η 7121 , 0 % 100 94 , 308 220 % 100 94 , 88 1 220 1
220 × = × =
+ × × = g η
= 0,7121 x 100% = 71,21%
2. Untuk IGL = 2.3 Amper
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V1.IML – {( IGL+IGsh )2. Ra + ( IGL+IML-IMsh )2. Ra + V1.IGsh + V1.IMsh}
49 = 292,6 – ( 22,94 + 44,29 + 41,8 + 37,4 )
= 146,16 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 73,08 Watt Daya masuk ke motor = V1 . ( IGL+IML )
= 220 . ( 2,3 + 1,33 )
= 798,6 watt
Total rugi-rugi motor = (IGL+IML-IMsh)2. Ra + V1.IMsh + Wm&g /2 = ( 2,3+1,33-0,17)2. 3,7 + 220 . 0,17 + 73,08 Maka, Wm (total rugi-rugi motor) = 153,865 Watt
Efisiensi Motor (ηm)
(
)
(
)
100%% 100 1 1 × + − + = × ∑ − = ML GL m ML GL in in m I I V W I I V P rugi P η
(
)
(
)
100% 0,80736 , 798 86 , 153 6 , 798 % 100 33 , 1 3 , 2 220 86 , 153 33 , 1 3 , 2 220 = × − = × + − + = m η
= 0,8073 x 100% = 80,73% Daya keluaran generator = V1 . IGL
= 220 . 2,3
= 506 Watt
- Total rugi-rugi generator = (IGL+IGsh)2. Ra + V1.IGsh + Wm&g /2 = (2,3 + 0.19)2. 3,7 + 220.0.19 + 73,08 = 22,94 + 41,8 + 73,08
50 % 100 % 100 1 1 × + = × + = g GL GL g out out g W I V I V W P P η 785 , 0 % 100 82 , 643 506 % 100 82 , 137 3 , 2 220 3 , 2 220 = × = × + × × = g η
= 0,7859 x 100% = 78,59%
3. Untuk IGL = 3.7 Amper
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V1.IML – {( IGL+IGsh )2. Ra + ( IGL+IML-IMsh )2. Ra + V1.IGsh + V1.IMsh}
= 220.1,73–{(3,7+0,19)2. 3,7+(3,7+1,73-0,18)2. 3,7+220.0,19+220 . 0,18} = 380,6 – ( 55,99 + 101,98 + 41,8 + 39,6 )
= 136,96 Watt
Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 70,61 Watt Daya masuk ke motor = V1 . ( IGL+IML )
= 220 . ( 3,7 + 1,73 )
= 1194,6 watt
Total rugi-rugi motor = (IGL+IML-IMsh)2. Ra + V1.IMsh + Wm&g /2 = ( 3,7+1,73-0,18)2. 3,7 + 220 . 0,18 + 70,61 Maka, Wm (total rugi-rugi motor) = 212,195 Watt
Efisiensi Motor (ηm)
(
)
(
)
100%51
(
)
(
)
1194,6 100% 0,8224195 , 212 6 , 1194 % 100 73 , 1 7 , 3 220 195 , 212 73 , 1 7 , 3
220 × = − × =
+ − + = m η
= 0,8224 x 100% = 82,24% Daya keluaran generator = V1 . IGL
= 220 . 3,7
= 814 Watt
- Total rugi-rugi generator = (IGL+IGsh)2. Ra + V1.IGsh + Wm&g /2 = (3,7 + 0.19)2. 3,7 + 220.0.19 + 70,61 = 55,9 + 41,8 + 70,61
- jadi, Wg (total rugi-rugi generator) = 168,405 Watt
Efisiensi Generator (ηg)
% 100 % 100 1 1 × + = × + = g GL GL g out out g W I V I V W P P η 8285 , 0 % 100 405 , 982 814 % 100 405 , 168 7 , 3 220 7 , 3 220 = × = × + × × = g η
= 0,8285 x 100% = 82,85%
4. Untuk IGL = 4.8 Amper
Rugi-rugi besi, angin dan rugi-rugi gesek motor dan generator adalah sbb: Wm&g = V1.IML – {( IGL+IGsh )2. Ra + ( IGL+IML-IMsh )2. Ra + V1.IGsh + V1.IMsh}
= 220.2,34–{(4,8+0,19)2. 3,7+(4,8+2,34-0,18)2. 3,7+220.0,19+220 . 0,18} = 514,8 – ( 92,13 + 179,23 + 41,8 + 39,6 )
52 Maka rugi-rugi besi, gesek dan angin motor adalah : Wm&g /2 = 81,02 Watt
Daya masuk ke motor = V1 . ( IGL+IML ) = 220 . ( 4,8 + 2,34 )
= 1570,8 watt
Total rugi-rugi motor = (IGL+IML-IMsh)2. Ra + V1.IMsh + Wm&g /2 = ( 4,8+2,34-0,18)2. 3,2 + 220 . 0,18 + 81,02 Maka, Wm (total rugi-rugi motor) = 299,92 Watt
Efisiensi Motor (ηm)
(
)
(
)
100%% 100 1 1 × + − + = × ∑ − = ML GL m ML GL in in m I I V W I I V P rugi P η
(
)
(
)
100% 0,80908 , 1570 92 , 299 8 , 1570 % 100 34 , 2 8 , 4 220 92 , 299 34 , 2 8 , 4
220 × = − × =
+ − + = m η
= 0,8090 x 100% = 80,90% Daya keluaran generator = V1 . IGL
= 220 . 4,8
= 1056 Watt
- Total rugi-rugi generator = (IGL+IGsh)2. Ra + V1.IGsh + Wm&g /2 = (4,8 + 0.19)2. 3,7 + 220.0.19 + 81,02 = 92,13 + 41,8 + 81,02
- jadi, Wg (total rugi-rugi generator) = 214,95 Watt
Efisiensi Generator (ηg)
53 8308 , 0 % 100 95 , 1270 1056 % 100 95 , 214 8 , 4 220 8 , 4
220 × = × =
+ × × = g η
= 0,8308 x 100% = 83,08%
Dari hasil perhitungan diatas maka dapat dibuat tabel hasil analisa data seperti yang terdapat dalam Tabel 2 dan 3 dibawah ini:
Dimana : Tegangan Sumber (V) = 220 Volt ( Konstan ) Tahanan jangkar kedua mesin = 3,7 ohm
No V1
(volt) V2 (volt) IGL (A) IML (A) IGsh (A) IMsh (A) Wm (Watt) ηm (%)
1 220 0 1 0,8 0,19 0,16 87,05 78
[image:55.612.115.499.256.430.2]2 220 0 2,3 1,33 0,19 0,18 153,86 80,73 3 220 0 3,7 1,73 0,18 0,17 212,19 82,24 4 220 0 4,8 2,34 0,18 0,17 299,92 80,92
Tabel 4.2 Hasil Analisa Data Motor Pada Pengujian Hopkinson No V1
(volt) V2 (volt) IGL (A) IML (A) IGsh (A) IMsh (A) Wg (Watt) ηg (%)
1 220 0 1 0,8 0,19 0,16 88,94 71,21
2 220 0 2,3 1,33 0,19 0,18 137,82 78,59 3 220 0 3,7 1,73 0,18 0,17 168,40 82,85 4 220 0 4,8 2,34 0,18 0,17 214,95 83,08
[image:55.612.119.499.478.653.2]54
IV.2 Penerapan Uji Retardasi Dalam Menentukan Rugi – Rugi dan Efisiensi
Motor DC Shunt
IV.2.1 Prinsip Dasar
Metode ini digunakan selain untuk menentukan J juga untuk menentukan rugi – rugi rotasi pada motor DC. Dengan menjalankan metode ini, maka dapat diketahui energi yang hilang akibat rugi – rugi rotasi dalam Motor DC shunt.
Anggap suatu motor DC shunt bekerja pada saat tanpa beban.
1. Jika suplai ke jangkar dilepas tetapi medan tetap dieksitasi normal, motor tersebut mulai melambat secara bertahap dan akhirnya berhenti. Energi kinetik jangkar digunakan untuk mengatasi rugi – rugi gesek dan angin dan rugi – rugi besi.
2. Jika suplai jangkar dan medan shunt dilepas bersamaan, motor juga akan melambat dan akhirnya berhenti. Sekarang juga energi kinetik jangkar digunakan hanya untuk mengatasi rugi – rugi gesekan dan angin. Ini diperkirakan karena tidak adanya fluks sehingga tidak ada rugi – rugi besi.
Dengan menjalankan pengujian yang pertama, kita akan mendapatkan nilai rugi – rugi gesek, angin dan besi. Namun demikian, jika kita juga menjalankan pengujian yang kedua, kita dapat memisahkan antara rugi – rugi gesek dan angin dengan rugi – rugi besi. Energi kinetik jangkar ditentukan dengan persamaan :
2
2 1
ω = J
EK ...(4.6)
Dimana : J = momen inersia jangkar (kgm2) ω= Kecepatan sudut, (rad/s) =
60 2πn
55 Maka di dalam metode retardasi ini, laju perubahan energi kinetik dianggap untuk mengatasi rugi – rugi rotasi motor. Jika laju perubahan energi kinetik ini disimbolkan dengan ∆w, maka
w
∆ =
dt dEK
∆w = ) 2 1 ( Jω2 dt
d
w=
dt d
Jω ω
w = )
60 2 ( 60
2 n
dt d n
J× π × π
w= Watt
dt dn Jn 011 ,
0 ...(4.7)
Dengan mengetahui nilai momen inersia jangkar (J) dan nilai perubahankecepatan ( )
dt dω
atau
dt dn
dari percobaan, maka perhitungan rugi – rugi rotasi pada Motor DC shunt dapat
ditentukan.
IV.2.2 Metode Pengukuran Momen Inersia Pada Jangkar Motor DC Shunt
Di dalam uji retardasi, rugi – rugi rotasi motor di berikan dengan persamaan (6.19) [6] :
w= Watt
dt dn Jn 011 , 0
56 dilaksanakan percobaan yang lain sebagai perbandingan untuk mendapatkan nilai inersia jangkar motor tersebut. Percobaan ini disebut dengan metode roda pejal. Mula – mula, pengujian retardasi dilakukan dengan rotor sendiri dan nilai dn/dt1.diukur dan dicatat. Selanjutnya, sebuah roda pejal yang diketahui momen inersianya (J1) dikuncikan ke ujung poros motor. Untuk perubahan kecepatan yang sama, dn/dt2 dicatat. Karena penambahan roda pejal tidak mempengaruhi rugi-rugi rotasi secara materialnya dari kedua kasus maka,
Untuk kasus pertama, w=
1 011 , 0 dt dn Jn ...(4.8)
Untuk kasus kedua, w= 0,011(J + J1)
2 dt dn n ...(4.9) 1 011 , 0 dt dn
Jn = 0,011(J + J1)
2 dt dn n 1 dt dn
Jn = (J + J1)
2 dt dn n J J1) (J+ = 1 2 2 1 / dt dn / dt dt dt dn = J J1 = 1 1 2 1 1 2 -dt
dt t t t dt − = J = 1 2 1 1 t t t J − × ...(4.10)
57
IV.2.3 Spesifikasi Motor DC Shunt
Uji retardasi yang dilaksanakan di laboratorium Konversi Energi Listrik FT USU diterapkan pada mesin DC untuk rating sebagai berikut :
a. Motor DC Shunt
TYP Gd 110/110 G-Mot Nr. 7983733 Tegangan nominal = 220 V
P = 1,2 KW IL =7,1 A Ish= 0,175 A n = 1500 rpm b. Generator DC
TYP Gd 110/110 G-Mot Nr. 7983745 Tegangan nominal = 220 V
P = 1,2 KW IL =7,1 A Ish= 0,177 A n = 1500 rpm
IV.2.4 Peralatan pengujian
Peralatan yang dipergunakan dalam pengujian ini terdiri dari : a. Roda Pejal dengan massa 6,5 kg, diameter 26 cm.
58 c. Instrumen Pengukuran terdiri dari amperemeter, voltmeter, tachometer, dan stopwatch
d. Power Suplai terdiri dari PTAC Tiga phasa, PTDC dan Penyearah Dioda Tiga Phasa Gelombang Penuh
[image:60.612.240.373.236.340.2]e. Generator Arus Searah AEG 1,2 kW f. Resistor Variabel.
Gambar 4.3 Roda Pejal
IV.2.5 Prosedur Percobaan
Di dalam ujian retardasi ini, dilakukan beberapa pengujian diantaranya : 1. Uji retardasi dengan rotor sendiri tanpa eksitasi
2. Uji retardasi dengan roda pejal tanpa eksitasi 3. Uji retardasi dengan rotor sendiri eksitasi penuh 4. Uji retardasi dengan roda pejal eksitasi penuh 5. Uji retardasi dengan pembebanan listrik
Selain pengujian di atas dilakukan juga pengujian lainnya yaitu : 1) Pengukuran tahanan jangkar motor
59 Rangkaian kontrol dalam uji retardasi ini ditunjukkan pada Gambar 4.5 berikut :
M
M ON
[image:61.612.226.380.100.187.2]OFF
Gambar 4.4 Rangkaian Kontrol
Adapun prosedur pengujian – pengujian diatas dilaksanakan sebagai berikut:
IV.2.5.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi.
1) Rangkain percobaan disusun seperti gambar berikut.
P
T
A
C
3Φ
M R
S
T
S
+
-M
M M
M
v
A1
A2
RLse
Gambar 4.5 Rangkaian percobaan uji retardasi dengan rotor sendiri tanpa eksitasi 2) Posisi Power supply dalam keadaan minimum dan tahanan seri variabel RLse maksimum. Kemudian saklar S ditutup lalu tombol ON ditekan.
3) Tegangan terminal motor dinaikkan dengan mengatur PTAC hingga pembacaan voltmeter V sebesar 220 volt dan amperemeter A2 sebesar 0,17 Ampere.
4) Atur tahanan RLse hingga putaran motor mencapai nominal 1500 rpm.
[image:61.612.109.517.348.486.2]60 tombol OFF ditekan, maka suplai tegangan motor akan lepas dan motor akan mulai mengalami perlambatan. Waktu penurunan kecepatan motor dari 1500 rpm sampai 1400 diukur dengan stopwatch. Kemudian pembacaan waktu stopwatch dicatat. Percobaan diulang kembali seperti pada poin 2 sampai poin 5 sebanyak 10 kali.
IV.2.5.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi.
1) Rangkain percobaan disusun seperti gambar dibawah ini. Roda pejal dipasang ke ujung poros rotor lalu dikunci.
P
T
A
C
3Φ
M R
S
T
S
+
-M
M M
M
v
A1
A2
[image:62.612.102.522.302.428.2]RLse
Gambar 4.6 Rangkaian percobaan uji retardasi dengan roda pejal tanpa eksitasi
2) Posisi Power supply dalam keadaan minimum dan tahanan seri variabel RLse maksimum. Kemudian saklar S ditutup lalu tombol ON ditekan.
3) Tegangan terminal motor dinaikkan dengan mengatur PTAC hingga pembacaan voltmeter V sebesar 220 volt dan amperemeter A2 sebesar 0,17 A.
4) Atur tahanan RLse hingga putaran motor mencapai nominal 1500 rpm.
61 mengalami perlambatan. Waktu penurunan kecepatan motor dari 1500 rpm sampai 1400 diukur dengan stopwatch. Kemudian pembacaan waktu stopwatch dicatat. Percobaan diulang kembali seperti pada poin 2 sampai poin 5 sebanyak 10 kali.
IV.2.5.3 Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh
1) Rangkain percobaan disusun seperti gambar berikut.
P
T
A
C
3φ
M R
S
T
S
+
-M M
v
A1
A2
[image:63.612.107.510.236.373.2]RLse
Gambar 4.7 Rangkaian percobaan uji retardasi dengan rotor sendiri eksitasi penuh
2) Posisi Power supply dalam keadaan minimum dan tahanan seri variabel RLse maksimum. Kemudian saklar S ditutup lalu tombol ON ditekan.
3) Tegangan terminal motor dinaikkan dengan mengatur PTAC hingga pembacaan voltmeter V sebesar 220 volt dan amperemeter A2 sebesar 0,17 A.
4) Atur tahanan RLse hingga putaran motor mencapai nominal 1500 rpm.
62 diukur dengan stopwatch. Kemudian pembacaan waktu stopwatch dicatat. Percobaan diulang kembali seperti pada poin 2 sampai poin 5 sebanyak 10 kali.
IV.2.5.4 Uji Retardasi dengan Roda Pejal Eksitasi Penuh
1) Rangkain percobaan disusun seperti gambar dibawah ini. Roda pejal dipasang ke ujung poros rotor lalu dikunci.
P
T
A
C
3φ
M R
S
T
S
+