PERANCANGAN MONITORING JARAK JAUH
KETINGGIAN AIR PADA WADUK MENGGUNAKAN
SENSOR ULTRASONIK
BERBASIS PC
SKRIPSI
AMIN ODOS SIBUEA 100801024
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERANCANGAN MONITORING JARAK JAUH
KETINGGIAN AIR PADA WADUK MENGGUNAKAN
SENSOR ULTRASONIK
BERBASIS PC
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
AMIN ODOS SIBUEA 100801024
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Perancangan Monitoring Jarak Jauh Ketinggian air
Pada Waduk Menggunakan Sensor Ultrasonik
Berbasis PC
Kategori : Skripsi
Nama : Amin Odos Sibuea
Nomor Induk Mahasiswa : 100801024
Program Studi : Sarjana (S1) Fisika
Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam
Universitas Sumatera Utara
Disetujui di
Medan, Agustus 2014
Komisi Pembimbing :
Pembimbing 2, Pembimbing 1,
Dr.Bisman Perangin-angin M.Eng.Sc Dr. Marhaposan Situmorang
NIP. 195609181985031002 NIP. 195510301980031003
Disetujui Oleh
Departemen Fisika FMIPA USU
Ketua,
Dr.Marhaposan Situmorang
PERNYATAAN
PERANCANGAN MONITORING JARAK JAUH
KETINGGIAN AIR PADA WADUK MENGGUNAKAN
SENSOR ULTRASONIK
BERBASIS PC
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali
beberapa kutipan dan ringkasan yang masing masing disebutkan sumbernya.
Medan, Agustus 2014
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pengasih
yang oleh karena kasih dan karuniaNya, Penulis dimampukan untuk menyelesaikan skripsi ini. Adapun Judul dari skripsi saya ini adalah“ Perancangan Monitoring jarak jauh ketinggian air pada waduk menggunakan sensor ultrasonik berbasis PC” yang disusun untuk memenuhi salah satu syarat dalam kurikulum pembelajaran di Departemen Fisika Universitas Sumatera Utara untuk
memperoleh gelar Sarjana Sains.
Penulis juga mengucapkan terima kasih kepada :
1. Kepada Kedua Orang tua saya (Ds. H. Sibuea, S.Th dan L.br Simorangkir)
yang telah banyak memberikan motivasi, semangat, doa dan dukungan
dalam menyelesaikan studi penulis, juga untuk Abang dan Kakak saya
yang tercinta ( Ruth Marnala Sibuea, Jona Egregius Sibuea S.Pd, Josep
Eisen Hower Sibuea ST, Esosia Benyamin Sibuea ST, dan Maria Sofia
Sibuea A.md). Terima kasih buat semua dukungan dan bimbingannya.
2. Bapak Dr.Marhaposan Situmorang dan Bapak Dr.Bisman Perangin-angin
M.Eng.Sc sebagai Dosen pembimbing saya dalam menyelesaikan skripsi
ini. Semua itu karena bimbingan, motivasi, ide atau gagasan dan memacu
semangat dari bapak dalam penyelesaian skripsi ini.
3. Bapak Dekan USU Bapak Dr.Sutarman M.Sc beserta seluruh Civitas
Akademika FMIPA USU.
4. Bapak Dr. Marhaposan Situmorang selaku Ketua Jurusan Departemen
Fisika FMIPA USU dan juga Bapak Drs. Syahrul Humaidi M.Sc selaku
Sekertaris Jurusan Departemen Fisika FMIPA USU.
5. Ruth Mariany Lumban Gaol A.md sebagai teman yang selalu memberikan
dukungan dan bantuan dalam penyelesaian skripsi ini.
6. Seluruh teman teman Asisten Laboratorium, Laboratorium Elektronika
Kalam Siregar S.Si, Gunawan B.Sitorus, Okto H.Situmorang dan Bernike
Natalia Ginting) dan Rieny Sitanggang, S.Si
7. Sahabat seperjuangan saya Gunawan B.Sitorus, Juli Sitorus dan Ataran
Marpaung. Tetap yang terbaik.
8. Semua kawan-kawan saya Fisika Angkatan 2010 yang turut serta
mendukung dalam penulisan skripsi ini.
Penulis menyadari masih banyak kekurangan dalam penulisan skripsi ini. Oleh
karena itu penulis sangat mengharapkan kritik dan saran yang membangun dalam
penyempurnaan skripsi ini.
Akhir kata, penulis mengucapkan banyak terima kasih atas dukungan dan
PERANCANGAN MONITORING JARAK JAUH
KETINGGIAN AIR PADA WADUK MENGGUNAKAN
SENSOR ULTRASONIK
BERBASIS PC
ABSTRAK
Telah dirancang dan direalisasikan sistem monitoring jarak jauh ketinggian air pada waduk menggunakan sensor ultrasonik berbasis PC. Proses pengiriman data dilakukan dengan menggunakan modul RF (Radio Frequency) Transceiver KYL 1020U. Modul ini telah dilengkapi dengan sistem pemancar (transmitter) dan sistem penerima (receiver). Data yang dikirim adalah data hasil pendeteksian sensor ultrasonik yaitu untuk mengukur ketinggian air. Pengiriman data dari mikrokontroler ATmega 8535 ke rangkaian pemancar dilakukan secara Asynchoronous yaitu pengiriman data 8 bit yang berupa data ASCII. Setelah itu data yang diterima oleh rangkaian pemancar akan dikirimkan ke rangkaian penerima melalui media transmisi gelombang radio. Data yang diterima di bagian pemancar akan di modulasi digital, yaitu proses penumpangan data digital dengan gelombang pembawa sedangkan pada rangkaian penerima, data akan didemodulasi yaitu proses pemisahan data digital dengan gelombang pembawa supaya dapat dibaca di PC.
Kata kunci : Sensor Ultrasonik, Mikrokontroler ATmega 8535, Modul RF
DESIGN OF LONG DISTANCE MONITORING LEVEL IN
RESERVOIR USING ULTRASONIC SENSOR
BASED PC
ABSTRACT
Has been designed and realized a monitoring system of long distance for the water level in reservoir using ultrasonic sensor based PC. The process of sending data using RF module (Radio Frequency) transceiver KYL 1020U. This module has been completed with a transmitter system and receiver system. Sent data is the data that the result of the detection sensor Ultrasonic for level water. Sending data from microcontroller ATmega 8535 to transmitter circuit by Asynchoronous and sending 8 bits of data in the form of ASCII data. After that, the data accepted by the transmitter circuit and already send to receiver circuit by a series of radio wave transmission medium. Data in transmitter will be digital modulated, that is the process place to stay the digital data with a carrier wave whereas at the receiver circuit, the data will be demodulated digital that is the process of separation digital data with carrier wave that can be read on PC.
DAFTAR ISI
1.4Tujuan Penelitian 3
1.5Manfaat Penelitian 3
1.6 Sistematika Penulisan 3
BAB II Landasan Teori
BAB III Perancangan dan Sistem Kerja Rangkaian
3.7 Rangkaian Pemancar (Transmitter) RF Transceiver KYL 1020U 37 3.8 Rangkaian Penerima (Receiver) RF Transceiver KYL 1020U 39 3.9 Rangkaian lampu indikator 40 3.10 Rangkaian lengkap Penerima (Receiver RF Transceiver) 41 3.11 Rangkaian lengkap Pemancar (Transmitter RF Transceiver) 41
3.12 Rangkaian lengkap (Transmitter dan Receiver) 42 3.13 Diagram alir (Flow Chart) 43 BAB VI Hasil dan Analisis 4.1 Pengujian Alat 45 4.1.2 Pengujian Tampilan pada PC 45 4.1.3 Pengujian Rangkaian Pemancar (Transmitter) 50 4.1.4 Pengujian Pada Sensor Ultrasonik SR04 54
4.2 Analisa Data 55 4.2.1 Pengujian jarak antara Transmitter dengan Receiver 55 4.2.2 Pengujian level ketinggian air dengan jarak baca sensor 56 4.2.3 Pengambilan Data pada setiap level air 56
BAB V Kesimpulan dan Saran
5.1 Kesimpulan 60
5.2 Saran 60
Daftar Pustaka 61
Lampiran I Gambar Sistem Peralatan
Lampiran II Program pada mikrokontroler atmega 8535
Lampiran III Program pada Visual Basic
Lampiran IV Data Pengujian Alat
DAFTAR TABEL
Nomor Judul Halaman
Tabel
Tabel 2.1. Konfigurasi Pin ATmega 8535... 9
Tabel 2.2 Deskripsi interface RF KYL 1020U………... 25
Tabel 2.3 Konfigurasi Konektor DB 9………. 29
Tabel 4.1 Kalibrasi sensor ultrasonik……….. 54
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
Gambar 2.1 Prinsip kerja sensor ultrasonic…………... 6
Gambar 2.2 Timing diagram sensor ultrasonik ……….. 7
Gambar 2.3 Konfigurasi Pin ATmega 8535... 9
Gambar 2.4 Transmisi Asinkron dan komunikasi asinkron..…... 13
Gambar 2.5 Diagram blok arsitektur USART ATmega 8535…………. 16
Gambar 2.6 Dasar Sistem komunikasi... 18
Gambar 2.7 Model Komunikasi Data Nirkablel... 20
Gambar 2.8 Modulasi FSK... 23
Gambar 2.9 Modul RF Transceiver KYL 1020U... 25
Gambar 2.10 Dimensi Ukuran RF... 26
Gambar 2.11 Konfigurasi Pin KYL Transmitter... 26
Gambar 2.12 Konfigurasi Pin KYL Receiver………... 27
Gambar 2.13 Skematik Buzzer………...………... 28
Gambar 2.14 Konektor serial DB 9………..…………..………... 29
Gambar 3.1 Diagram blok Rangkaian... 31
Gambar 3.2 Diagram Blok Rangkaian Mikrokontroler ATmega 8535... 33
Gambar 3.3 Rangkaian Skematik Power Supply... 35
Gambar 3.4 Rangkaian Buzzer... 35
Gambar 3.5 Rangkaian Sensor Ultrasonik SR04... 36
Gambar 3.6 Rangkaian PSA Rangkaian Penerima…………... 37
Gambar 3.7 Rangkaian Pemancar RF Transceiver KYL 1020U………. 38
Gambar 3.8 Diagram Blok Rangkaian Transmitter ….……… 38
Gambar 3.10 Diagram Blok Rangkaian Receiver...………. 40
Gambar 3.11 Rangkaian lampu indikator...……… 40
Gambar 3.12 Rangkaian lengkap Penerima (receiver)……….. 41
Gambar 3.13 Rangkaian lengkap Pemancar (Transmitter)……… 41
Gambar 3.14 Rangkaian lengkap (Transmitter dan Receiver)…………... 42
Gambar 3.15 Flow Chart pada mikrokontroler Atmega 8535……… 43
PERANCANGAN MONITORING JARAK JAUH
KETINGGIAN AIR PADA WADUK MENGGUNAKAN
SENSOR ULTRASONIK
BERBASIS PC
ABSTRAK
Telah dirancang dan direalisasikan sistem monitoring jarak jauh ketinggian air pada waduk menggunakan sensor ultrasonik berbasis PC. Proses pengiriman data dilakukan dengan menggunakan modul RF (Radio Frequency) Transceiver KYL 1020U. Modul ini telah dilengkapi dengan sistem pemancar (transmitter) dan sistem penerima (receiver). Data yang dikirim adalah data hasil pendeteksian sensor ultrasonik yaitu untuk mengukur ketinggian air. Pengiriman data dari mikrokontroler ATmega 8535 ke rangkaian pemancar dilakukan secara Asynchoronous yaitu pengiriman data 8 bit yang berupa data ASCII. Setelah itu data yang diterima oleh rangkaian pemancar akan dikirimkan ke rangkaian penerima melalui media transmisi gelombang radio. Data yang diterima di bagian pemancar akan di modulasi digital, yaitu proses penumpangan data digital dengan gelombang pembawa sedangkan pada rangkaian penerima, data akan didemodulasi yaitu proses pemisahan data digital dengan gelombang pembawa supaya dapat dibaca di PC.
Kata kunci : Sensor Ultrasonik, Mikrokontroler ATmega 8535, Modul RF
DESIGN OF LONG DISTANCE MONITORING LEVEL IN
RESERVOIR USING ULTRASONIC SENSOR
BASED PC
ABSTRACT
Has been designed and realized a monitoring system of long distance for the water level in reservoir using ultrasonic sensor based PC. The process of sending data using RF module (Radio Frequency) transceiver KYL 1020U. This module has been completed with a transmitter system and receiver system. Sent data is the data that the result of the detection sensor Ultrasonic for level water. Sending data from microcontroller ATmega 8535 to transmitter circuit by Asynchoronous and sending 8 bits of data in the form of ASCII data. After that, the data accepted by the transmitter circuit and already send to receiver circuit by a series of radio wave transmission medium. Data in transmitter will be digital modulated, that is the process place to stay the digital data with a carrier wave whereas at the receiver circuit, the data will be demodulated digital that is the process of separation digital data with carrier wave that can be read on PC.
BAB I PENDAHULUAN
1.1Latar Belakang
Sistem monitoring pada saat ini sudah semakin maju seiring dengan
berkembangnya teknologi. Salah satunya penggunaan Mikrokontroler yang
semakin pesat untuk pengaplikasianya dalam memonitoring. Sistem pemantau
tersebut dilakukan bertujuan untuk dapat mengawasi segala aktifitas atau kegiatan
yang terjadi pada suatu ruangan atau daerah tertentu yang dianggap penting dijaga
keamanannya.
Sistem keamanan dan pemantau waduk khususnya di Indonesia masih
minim dan kurang pengoperasian yang dapat mengakibatkan kebanjiran pada
daerah tertentu akibat banyaknya air pada waduk yang yang langsung dilepas
tanpa memperhatikan jumlah air yang dikeluarkan. Hal ini perlu diperhatikan
untuk sistem keamanan waduk supaya dapat bekerja dengan efisien. Hal itu dapat
terjadi karena efek cuaca disekitar daerah waduk yaitu cuaca mendung yang terus
menerus yang mengakibatkan derasnya hujan. Air pada waduk akan cepat penuh
dan tidak diketahui oleh petugas. Alat ini sangat berfungsi untuk sistem
monitoring jarak jauh dengan menampilkan ketinggian air pada PC. Jadi kita
dapat memantau ketinggian air pada saat posisi level berapa berada air tersebut.
Pada perancangan alat ini telah dibuat dengan sistem pemantauan dengan
lampu indikator yang menyatakan level ketinggian air dan dilengkapi dengan
buzzer sebagai pertanda level ketinggian air telah melampaui batas dan dalam
keadaan berbahaya. Data akan segera dikirimkan melalui modul RF (Radio
Frequency) dari pemancar (transmitter) ke penerima (receiver). Proses itu terjadi
dengan adanya sistem modulasi dan demodulasi data pada saat pentransmisian
data melalui gelombang radio. Data tersebut akan langsung dikirim ke PC untuk
dapat dimonitoring dari jarak jauh. Pengiriman data sebaiknya tidak melewati
berbagai hambatan misalnya gedung, pegunungan, tebing dan lain sebagainya.
Kita harus memilih daerah yang bebas hambatan. Hal itu berfungsi untuk
Berdasarkan uraian diatas Penulis merancang dan melakukan penelitian dan
membuat alat yaitu : “ PERANCANGAN MONITORING JARAK JAUH KETINGGIAN AIR PADA WADUK MENGGUNAKAN SENSOR ULTRASONIK BERBASIS PC”.
Sensor ultrasonik adalah sensor yang akan dipakai dalam perancangan
monitoring ini dimana data deteksian sensor dibaca mikrokontroler dan data serial
dikirim ke Modul RF Transceiver KYL 1020U dan data serial dikirim ke PC
melalui Konektor DB 9 yang menyatakan level ketinggian air pada waduk.
1.2Rumusan Masalah
Rumusan Masalah yang dibahas dalam Penelitian ini adalah :
1. Bagaimana merancang alat untuk memonitoring ketinggian air pada
waduk berbasis PC menggunakan sensor ultrasonik.
2. Bagaimana penyampaikan data serial ke PC menggunakan Modul RF
Transceiver KYL 1020U.
3. Bagaimana sistem kerja Sensor ultrasonik untuk mendeteksi
ketinggian air pada waduk.
1.3Batasan Masalah
Adapun batasan masalah yang akan dibahas dalam penelitian ini adalah :
1. Sistem perancangan monitoring jarak jauh ketinggian air pada waduk
menggunakan sistem komunikasi Modul RF Transceiver KYL 1020U.
2. Mikrokontroler yang digunakan adalah Mikrokontroler jenis ATMega
8535.
3. Sensor pendeteksi ketinggian air pada waduk menggunakan sensor
ultrasonik.
4. Sistem monitoring yang dilakukan dalam penelitian ini adalah berbasis
PC.
5. Data yang dikirim sesuai program yang diatur pada mikrokontroler
yang menggunakan program Code Vision AVR dan Visual Basic pada
6. Rangkaian Pemancar RF dan Penerima RF tidak dibahas secara
mendalam.
1.4Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah :
1. Merancang alat untuk mengukur ketinggian air pada waduk berbasis
PC.
2. Untuk mengetahui keakuratan sensor ultrasonik dalam mendeteksi
ketinggian air pada waduk.
3. Mengaplikasikan sensor ultrasonik untuk memonitoring ketinggian air
pada waduk dari jarak jauh berbasis PC.
4. Menerapkan penggunaan Modul RF Transceiver KYL 1020U sebagai
sarana komunikasi wireless data digital secara serial.
1.5Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah :
1. Untuk mengetahui system monitoring level ketinggian air pada waduk
berbasis PC.
2. Untuk mengetahui prinsip kerja dan memahami cara pengaplikasian
sensor ultrasonik dalam mendeteksi level ketinggian air pada waduk.
3. Merancang alat yang berfungsi dalam sistem pengamanan level
ketinggian air pada waduk dan mengetahui penggunaan Modul RF
Transceiver KYL 1020U.
1.6Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat
PERANCANGAN MONITORING JARAK JAUH KETINGGIAN AIR
PADA WADUK MENGGUNAKAN SENSOR ULTRASONIK BERBASIS
PC. Maka penulis menulis skripsi ini dengan sistematika penulisan sebagai
BAB I PENDAHULUAN
Bab ini berisikan pendahuluan yang menjelaskan mengenai latar belakang,
perumusan masalah, tujuan penulisan, batasan masalah serta sistematika
penulisan.
BAB II LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan
untukTeori pendukung itu antara lain tentang Mikrokontroler ATmega
8535 (hardware dan software), Sensor ultrasonik, Modul RF Transceiver
KYL 1020U dan PC.
BAB III PERANCANGAN ALAT
Pada bab ini akan dibahas tentang perancangan alat, yaitu diagram blok
dari rangkaian, skematik dan sistem kerja dari masing-masing rangkaian.
BAB IV HASIL DAN ANALISIS
Bab ini berisikan tentang pengujian alat dan juga analisis tugas akhir yang
telah dibuat.
BAB V KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Sensor Ultrasonik
Sensor ultrasonik adalah sensor yang bekerja memancarkan dan menerima
gelombang dengan besar frekuensi diatas gelombang frekuensi suara yaitu lebih
dari 20 KHz. Rangkaian sensor ultrasonik terdiri dari rangkaian pemancar
ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik disebut
dengan receiver. Sinyal ultrasonik yang dibangkitkan akan dipancarkan dari
transmitter ultrasonik. Ketika sinyal mengenai benda penghalang maka sinyal ini
dipantulkan dan diterima oleh receiver ultrasonik. Sinyal yang diterima oleh
rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya
diolah untuk menghitung jarak terhadap benda didepannya (bidang pantul).
Sensor ultrasonik bekerja berdasarkan sistem kerja gelombang, dimana
gelombang yang digunakan adalah gelombang suara. Waktu untuk pada saat
gelombang suara itu dibangkitkan dan dipantulkan kembali oleh receiver akan
membutuhkan waktu.Waktu itulah yang akan menjadi data untuk menghitung
jarak yang akan kita ukur karena besaran kecepatan telah ada yaitu kecepatan
suara. Dengan kata lain sensor ultrasonik bekerja berdasarkan prinsip pantulan
gelombang suara.
Berikut adalah spesifikasi sensor ultrasonik :
a. Power Suply : 5 Volt
b. Frekuensi Ultrasonik : 40 KHz
c. Jarak maksimal : 400 cm
d. Jarak minimal : 2 cm
e. Trigger Pulse Width : 10 µs
Sensor ultrasonik bekerja dengan mengirimkan gelombang suara menuju target
dan mengukur waktu yang diperlukan untuk pulsa melenting kembali. Waktu
yang diperlukan gaung untuk kembali ke sensor berbanding lurus dengan jarak
atau tinggi dari objek, sebab suara mempunyai kecepatan konstan. Sinyal gaung
yang kembali secara elektronis diubah menjadi output 4mA sampai dengan 20mA,
yang mensuplai kecepatan aliran yang dimonitor ke alat kontrol eksternal. Objek
padat, cair, butiran dan tekstil dapat dideteksi dengan sensor ultrasonik.
Reflektifitas suara dari permukaan cairan sama dengan objek padat. Tekstil dan
buih menyerap gelombang suara dan mengurangi rentang pensensoran.
2.1.1 Prinsip kerja sensor ultrasonik
Ketika gelombang ultrasonik melewati suatu objek, sebagian dipantulkan,
sebagian diteruskan dan sebagian lagi diserap. Sensor itu menghasilkan
gelombang suara dan memancarkannya sehingga mengenai objek yang berada
didepannya kemudian pantulan gelombang suara dari objek yang berada
didepannya ditangkap dengan perbedaan waktu yang digunakan sebagai dasar
perhitungan jarak objek. Perbedaan waktu pancaran dan waktu pantulan
berbanding lurus dengan jarak objek yang memantulkannya. Jenis objek yang di
indranya dapat berupa zat padat, cair dan butiran.
2.1.2 Timing Diagram sensor Ultrasonik
Timing diagram sensor ultrasonik ditunjukkan pada gambar 2.2 dibawah ini. Kita
hanya perlu menyediakan pulsa 10 µs untuk memicu masukan atau masukan
trigger untuk memulai dan kemudian modul akan mengirim 8 siklus gelombang
ultrasonik 40 KHz dan meningkatkan gaungnya (echo). Echo adalah jarak objek
yang merupakan lebar pulsa dan jarak pada setiap bagiannya. Rentang melalui
interval waktu antara pengiriman sinyal pemicu dan penerima sinyal echo dapat
dihitung. Persamaannya adalah level waktu paling tinggi dikalikan dengan
kecepatan (340m/s) dibagi dua.
Gambar 2.2 Timing diagram sensor ultrasonik
2.2 Mikrokontroler ATmega 8535
Mikrokontroler Atmega 8535 merupakan mikrokontroler 8-bit teknologi CMOS
dengan konsumsi daya rendah yang berbasis arsitektur enhanced RISC AVR.
Dengan eksekusi instruksi yang sebagian besar hanya menggunakan satu siklus
clock, Atmega 8535 mencapai throughput sekitar 1 MIPS per MHz yang
mengizinkan perancangan sistem melakukan optimasi konsumsi daya versus
2.2.1 Arsitektur AVR ATmega8535
AVR merupakan mikrokontroler dengan arsitektur Harvard dimana antara kode
program dan data disimpan dalam memori secara terpisah. Umumnya jenis
arsitektur Harvard ini menyimpan kode program dalam memori permanen atau
semi permanen (non volatile) sedangkan data disimpan dalam memori tidak
permanen (volatile). Prosesor AVR menggabungkan set instruksi yang kaya
dengan 32 register umum (general purpose registers, GPRs). Semua 32 register
tersebut dikoneksikan langsung dengan Arithmetic Logic Unit (ALU),
mengizinkan dua register independen untuk diakses dalam satu instruksi yang
dieksekusi dalam satu siklus clock. Arsitektur yang dihasilkan adalah arsitektur
yang kode operasinya lebih efisien serta pencapaian throughtput nya hingga
sepuluh kali lebih cepat daripada mikrokontroler CISC (Complex Instruction Set
Computer) konvensional.
Beberapa fitur utama yang tersedia pada ATmega 8535 adalah :
a. Port I/O 32 bit, yang dikelompokkan dalam Port A, Port B, Port C dan
Port D.
b. Analog to Digital Converter 10-bit sebanyak 8 input.
c. Timer/counter sebanyak 3 buah dengan compare mode.
d. CPU 8 bit yang terdiri dari 32 register.
e. SRAM sebesar 512 byte.
f. Memory Flash sebesar 8 Kbyte dengan kemampuan read while write.
g. Interupsi Internal maupun eksternal.
h. Port Komunikasi SPI.
i. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
j. Analog Comparator.
k. Komunikasi serial standar USART dengan kecepatan maksimal 2,5 Mbps.
l. Frekuensi clock maksimum 16 MHz.
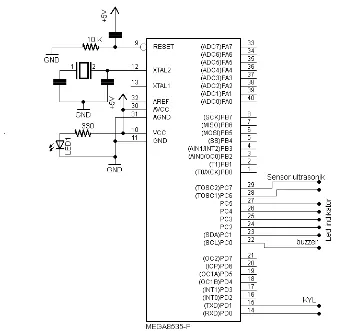
2.2.2 Konfigurasi Pin ATmega 8535
Konfigurasi pin mikrokontroler AVR ATmega 8535 untuk 40 pin DIP (dual in
Atmega 8535
Gambar 2.3 Konfigurasi Pin ATmega 8535
Untuk dapat memahami lebih jauh tentang konfigurasi pin ATmega 8535 maka
pada tabel 2.1 dijelaskan deskripsi kaki-kaki atau pin ATmega8535.
Tabel 2.1 Konfigurasi Pin ATmega 8535
No.Pin Nama Pin Keterangan
10 VCC Catu daya
1-7 Port B : PB0 – PB7
Port I/O dua arah dilengkapi internal pull
up resistor.Fungsi lain dari port ini masing
masing adalah :
PB0 : To (timer/counter0 external counter
input)
PB1 : T1 (timer/counter1 external conter
input)
PB2 : AIN0 (analog comparator positive
input)
PB3 : AIN1 (analog comparator positive
input)
PB4 : SS (SPI slave select input)
PB5 : MOSI (SPI bus master input/slave
input)
PB6 : MISO (SPI bus master input/slave
input)
berfungsi sebagai osilator eksternal untuk
timer/counter 2.
14-21 Port D : PD0 – PD7
Port I/O dua arah dilengkapi internal pull
up resistor. Fungsi lain dari port ini masing
masing adalah :
PD0 : RXD (UART input line)
PD1 : TXD (UART input line)
PD2 : INT0 (eksternal interrupt 0 input)
PD3 : INT 1 (eksternal interrupt 1 input)
PD4 : OC1B ( timer/counter 1 output
compare B match input)
PD5 : OC1A ( timer/counter 1 output
PD6 : ICP (timer/counter1 input capture
dan masukan ke rangkaian internal clock.
12 XTAL 2 Keluaran dari inverting oscillator amplifier
30 AVCC Catu daya untuk port A dan ADC
31 AGND Analog Ground
32 AREF Refrensi masukan analog untuk ADC
2.2.3 Komunikasi serial dan USART ATmega8535
Komunikasi serial merupakan salah satu alternatif yang relatif murah untuk
menggantikan komunikasi paralel, karena transfer data parallel menggunakan 8
jalur konduktor/kawat untuk mentransfer 8-bit sekaligus. Dengan menggunakan
komunikasi komunikasi serial, maka hal tersebut dapat dilakukan dengan hanya
menggunakan satu kawat konduktor saja, tetapi ditransfer bit demi bit sebanyak 8
kali untuk dapat menyelesaikan transfer satu byte data.
2.2.4 USART (Universal Synchronous Asynchronous Receiver Transmitter)
USART merupakan teknik komunikasi antara mikrokomputer (PC)
dengan sistem lain seperti mikroprosesor atau mikrokontroler baik secara sinkron
atau asinkron dengan pengiriman secara serial, yaitu pentransferan data bit demi
bit sampai membentuk satu frame data yang diawali dengan start bit dan diakhiri
dengan stop bit.
Komunikasi data serial secara sinkron merupakan bentuk komunikasi data
tersulut pada setiap bit pengiriman bit yang pertama dengan perubahan bit data
yang dapat diketahui oleh penerima dengan singkronisasi melalui sinyal clock.
Sedangkan komunikasi asinkron adalah suatu komunikasi data serial yang tidak
memerlukan sinyal clock sebagai sinkronisasi. Namun pengiriman data ini harus
diawali dengan start bit dan diakhiri dengan stop bit. Sinyal clock merupakan
baud rate dari komunikasi data yang dibangkitkan oleh masing-masing baik
penerima maupun pengirim data dengan frekwensi yang sama, jika nilai baud rate
berbeda maka tidak akan pernah terjadi komunikasi.
Prinsipnya yaitu bahwa penerima hanya perlu mendeteksi start bit sebagai
awal pengiriman data, selanjutnya komunikasi data terjadi antar dua buah shift
register yang ada pada pengirim maupun penerima. Setelah 8 bit data diterima,
penerima akan menunggu adanya stop bit sebagai tanda bahwa 1 byte data telah
dikirim dan penerima dapat siap untuk menunggu pengiriman data berikutnya.
Pengiriman data Asinkron
Pada pengiriman data tak sinkron, setiap karakter dikirimkan sebagai satu
kesatuan (entity) bebas, yang berarti bahwa waktu antara pengiriman bit terakhir
dari sebuah karakter dan bit pertama dari karakter berikutnya tidak tetap.
Pengiriman data asinkron lebih sederhana dibanding pengiriman sinkron, karena
hanya isyarat data saja yang dikirimkan. Detak penerima dibangkitkan secara
lokal didalam penerima dan tetap dijaga agar sesuai dengan detak pengirim yang
menggunakan bit awal (start bit) dan bit akhir (stop bit) yang dikirimkan dengan
setiap karakter. Pada keadaan tidak berfungsi, pengirim akan mempertahankan
tegangan jalur pada aras biner 1, dan detak penerima dihentikan.
Pada saat pengirim mempunyai karakter untuk dikirim, pertama kali
pengirim akan mengubah tegangan jalur menjadi aras biner 0, disebut bit awal,
selama periode waktu satu bit setelah itu bit dari karakter tersebut dikirimkan.
Detak penerima akan diawali dengan mengubah kondisi bit awal menjadi 0 dan
kemudian bekerja secara bebas untuk membangkitkan pulsa detak. Pulsa detak
pertama harus terjadi setelah selang waktu kira kira 1,5 bit dan setelah itu setiap
biasanya disesuaikan untuk meyakinkan bahwa waktu transisi detak terjadi kira-
kira separuh dari waktu yang diperlukan untuk menerima sebuah bit. Dengan
demikian, pencacahan setiap bit terjadi ditengah-tengah nya dan inilah yang
diinginkan supaya kemungkinan terjadinya kesalahan dapat diperkecil. Pada akhir
setiap karakter, bit akhir dikirimkan, tegangan pada aras biner adalah 1 untuk
menghentikan detak penerima. Strategi metode ini adalah mencegah masalah
pewaktuan dengan tidak mengirim aliran bit panjang yang tidak putus-putusnya,
melainkan data ditransmisikan perkarakter pada suatu waktu, dimana tiap karakter
adalah 5 sampai 8 bit panjang nya. Timing atau sinkronisasi harus dipertahankan
diantara tiap karakter. Pesawat penerima mempunyai kesempatan untuk
menyinkronkan awal dari tiap karakter baru.
Sender
Gambar 2.4 Transmisi Asinkron dan komunikasi Asinkron
Pada aplikasi proses komunikasi asinkron ini selalu digunakan untuk mengakses
komponen-komponen yang mempunyai fasilitas UART (Universal Asynchronous
Receiver/Transmitter) seperti pada port serial PC atau port serial mikrokontroler
lain. Efisiensi sistem tak sinkron tidak begitu tinggi, karena hanya 7 dari 10 bit
yang dikirimkan berisi informasi yang sesungguhnya. Istilah asynchronous
dipakai untuk menunjuk ke suatu kanal yang mempunyai kemampuan untuk
mengirimkan data tetapi tidak dapat melakukan isyarat pewaktuan (timing sgnal).
Jika detak penerima bekerja pada kecepatan yang berbeda dengan detak
dikirim oleh pengirim. Jika detak penerima sedikit lebih cepat dari pengirim,
penerima akan ambil sampel data yang datang lebih cepat. Setelah itu penerima
akan mengambil sampel bit yang sama untuk kedua kalinya dan data yang
diterima akan keluar dari sinkronisasi dengan data yang dikirim. Contoh
perangkat berbasis transmisi asinkron adalah RS 232, USB.
2.2.5 Inisialisasi USART ATmega 8535
Sebelum dilakukan komunikasi maka USART harus terlebih dahulu di inisialisasi.
Umumnya proses inisialisasi terdiri dari setting terhadap baud rate, setting pada
format frame dan melakukan enable pada pemancar atau penerima tergantung
penggunaanya. Pada operasi USART yang digerakkkan oleh interupsi, ketika
dilakukan maka Global interrupt Flag harus di clear dan interupsi global harus di
disable.
Sebelum dilakukan re-inisialisasi dengan mngubah baud rate atau format frame,
dipastikan sedang terjadi transmisi selama periode perubahan register. TXC Flag
dapat digunakan untuk mencek pemancar bahwa semua transfer telah selesai dan
RXC Flag dapat digunakan untuk mencek bahwa tidak terjadi unread data pada
receive buffer. Perlu dicatat bahwa TXC Flag harus di clear sebelum setiap
transmisi (sebelum UDR ditulis) jika hal ini digunakan untuk tujuan tersebut.
2.2.5.a Pengiriman Data – Pemancar USART ATmega 8535
Pemancar USART di enable dengan melakukan setting bit TXEN (Transmit
Enable) pada register UCSRB. Ketika pemancar di enable, operasi port normal
pin TXD dikesampingkan oleh USART dan melakukan fungsi sebagai output
pemancar serial. Baud rate, mode operasi dan frame format harus di set up
sebelum dilakukan transmisi. Jika digunakan operasi sinkron clock pada pin XCK
2.2.5.b Penerimaan Data – Penerimaan USART ATmega 8535
Penerima (receiver) USART di enable dengan cara menulisi bit Receive Enable
(RXEN) dalam register UCSRB dengan satu. Ketika penerima di enable, operasi
pin normal dari pin RxD dikesampingkan oleh USART dan memberikan fungsi
masukan Receiver Serial.Baud rate, mode operasi dan format frame harus di set
up pertama kali sebelum suatu penerimaan serial dapat dilakukan. Jika digunakan
operasi sinkron, maka clock pada pin XCK akan digunakan sebagai clock transfer.
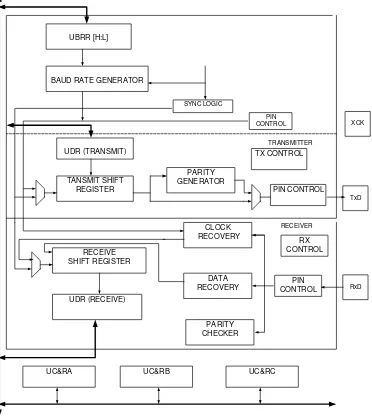
2.2.6 Arsitektur Internal USART ATmega 8535
Komunikasi USART merupakan fasilitas komunikasi serial yang disediakan oleh
mikrokontroler AVR ATmega8535 baik secara sinkron maupun asikron.
Komunikasi serial sinkron adalah komunikasi antara mikrokontroler dengan
peripheral lain dimana sinyal clock yang digunakan antara transmitter dan
receiver berasal dari satu sumber clock. Sedangkan komunikasi serial asinkron
masing masing mempunyai sumber clock sendiri. Komunikasi USART dilakukan
dalam mode full duplex (dua arah) antara transmitter dan receiver (dua arah).
Komunikasi serial yang banyak digunakan adalah teknik asikron, dimana
untuk menjaga sinkronisasi antara transmitter dan receiver maka digunakan teknik
pembingkaian data (framing) menggunakan bit start dan stop pada awal dan akhir
setiap byte data dalam rangkaian transmisinya. Kecepatan data untuk komunikasi
serial asinkron jauh lebih lambat daripada komunikasi serial sinkron, tetapi
penggunaanya lebih sederhana dan hanya menggunakan kawat tunggal antara
UBRR [H:L]
Gambar 2.5 Diagram blok arsitektur USART mikrokontroler AVR ATmega 8535
2.2.7 Sistem memori ATmega 8535
Kode program/instruksi disimpan dalam Flash memory, yaitu memori jenis
non-volatile yang tak akan hilang datanya meskipun catu daya dimatikan. Hampir
-semua instruksi berukuran 16-bit yang terdiri dari upcode dan data atau operand
yang nantinya akan diolah oleh instruksi tersebut. Hal ini tentu berbeda dengan
mikrokontroler pada umumnya dan sedikit membingungkan, karena
data RAM 8-bit. Jadi setiap pengalamatan program akan mengambil data selebar
16 bit tetapi untuk pengalamatan data RAM hanya 8 bit.
Meskipun tidak berlaku untuk semuanya tetapi pada umumnya ukuran
kapasitas memori program keluarga AVR ditunjukkan dari namanya. Sebagai
contoh ATmega64x berarti memiliki kapasitas memori program sebesar 64 kbyte.
Dalam program ini bahasa pemrograman yang digunakan adalah bahasa
pemrograman C.
2.3 Dasar Sistem Komunikasi Wireless
Pada sepuluh tahun terakhir, dampak komunikasi wireless begitu terasa
dalam aktivitas manusia sehari-hari, termasuk pada dunia bisnis, pendidikan,
social dan lainnya. Penggunaan telepon seluler, pager, dan wireless Personal
Digital Assistant (PDA) menjadi hal biasa dan begitu mudah melupakan kita pada
sepuluh tahun lampau dimna semua itu bagaikan mimpi yang mustahil terwujud,
yang nyatanya saat ini sudah begitu banyak orang yang dapat menikmati dan
mengambil manfaatnya.
Perspektif sejarah memberi kita pemahaman tentang evolusi substansial yang
berlangsung selama ini. Jaringan wireless tidak lain merupakan buah dari banyak
langkah evolusioner yang ditemukan manusia, terutama diawali dari konsep
telegraf dan aplikasi radio. Meskipun penemuan itu terjadi pada decade 1800-an,
sebagian besar evolusi komunikasi wireless modern lahir seiring berkembangnya
teknologi elektrik dan ilmu fisika.
Pada umumnya suatu sistem yang lengkap akan mengandung suatu
pemancar (transmitter), suatu medium pentransmisi dimana informasi ditransmisi,
dan suatu penerima (receiver) yang menghasilkan suatu replica (salinan) informasi
masukan (input) di keluaran (output) nya. Dalam kebanyakan pesawat
komunikasi, pentransmisian informasi sangat berhubungan dengan modulasi atau
perubahan waktu suatu sinyal sinusoida tertentu, yang dinamakan pembawa
Pemodulasi
Gambar 2.6 Dasar Sistem komunikasi
Pada umumnya pemancar pemancar mengandung sumber informasi yang
ditransmisi dalam kasus alat penyelidik ruang angkasa dapat berupa sinyal-sinyal
suara, sinyal Televisi, cetak luaran (printout) komputer, data telemetri atau
mungkin data telemetry yang ditransmisi dari suatu instalasi yang dioperasikan
secara otomatis dari jauh ke stasiun control sentral. Ketika sinyal-sinyal melewati
medium transmisi (atau yang sering disebut sebagai saluran/channel, sinyal
didistorsi, bising dan sinyal-sinyal penginterferensi (pengganggu) ditambahkan
dan ini menjadi salah satu tugas utama kita untuk menafsirkan secara betul
sinyal-sinyal yang akhirnya diterima ditujuan yang diinginkan.
2.3.1 Data dan Sinyal
Dalam penelitian ini data yang dikirimkan melalui media transmisi adalah
berbentuk deretan bit. Namun di dalam media transmisi misalnya gelombang
radio atau kabel bukanlah bit 1 dan bit 0 berderet-deret dari ujung kabel satu ke
ujung kabel lain. Untuk dapat ditransmisikan, data harus ditransformasikan
terlebih dahulu ke dalam bentuk gelombang elektromagnetik. Bit 1 dan 0 akan
mewakili oleh tegangan listrik dengan nilai amplitudo yang berbeda. Sebagai
contoh bit 1 diwakili oleh tegangan 1 volt dan bit 0 diwakili oleh tegangan -1 volt.
Dalam ilustrasi diatas bit 1 dan 0 adalah data, sedangkan tegangan listrik yang
melewati media transmisi adalah sinyal. Jadi setiap data yang akan ditransmisikan
harus ditransformasikan ke dalam bentuk sinyal terlebih dahulu. Perlu diingat
bahwa bentuk sinyal tidak selalu tegangan +1 dan 1. Dalam komunikasi data,
sinyal dapat direpresentasikan dengan level tegangan yang berbeda-beda
Berdasarkan bentuknya, data dan sinyal dapat dibedakan ke dalam data dan sinyal
analog atau data dan sinyal digital. Suatu data atau sinyal dikatakan analog
apabila amplitudo dari data atau sinyal tersebut terus-menerus ada dalam rentang
waktu tertentu (kontinu) dan memiliki variasi nilai amplitudo tak terbatas.
Misalnya, data yang berasal dari suara (Voice) tergolong sebagai data analog.
Sebaliknya data atau sinyal dikatakan digital apabila amplitudo dari data atau
sinyal tersebut tidak kontinu dan memiliki variasi nilai amplitudo yang terbatas
(diskrit).
2.3.2 Nirkabel (Jaringan tanpa kabel)
Media komunikasi nirkabel dikenal dengan unguided media karena sinyal yang
berupa gelombang elektromagnetik melintasi tanpa menggunakan kabel.
Gelombang elektromagnetik tersebut ditransmisikan melalui melintasi udara
terbuka dengan menggunakan antenna. Gelombang tersebut dapat membentur dan
memantul tanah, gedung, pohon, tiang listrik dan apa pun yang berada diantara
antenna pengirim dan penerima. Karena itu, gelombang elektromagnetik lebih
rentan terhadap gangguan interferensi, atenuasi dan derau dari luar. Setiap
benturan dan pantulan berpengaruh terhadap pelemahan energi gelombang.
Bahkan akibat adanya pantulan, beberapa gelombang dapat datang bersamaan
pada sisi penerima, model gelombang ini disebut dengan multipath propagation.
Karena itu perangkat pada sisi penerima gelombang elektromagnetik
membutuhkan kemampuan deteksi lebih kompleks jika dibandingkan dengan
perangkat penerima pada komunikasi dengan media kabel.
2.3.3 Transmisi sinyal radio
Radio merupakan transmisi wireless, yang menangkap impuls elektrik atau sinyal
melalui gelombang elektromagnetik (electromagnetic waves). Gelombang
elektromagnetik hadir pada semua tingkatan frekuensi. Subset kecil dari tingkatan
frekuensi yang umum adalah spektrum Radio Frequency (RF) dengan range 9
KHz sampai 300 GHz. Seorang ilmuwan Jerman, Heinrich Hertz,
melalui ruang gelombang elektromagnetik. Menyusul kemudian, seorang ilmuwan
italia, Guglielmo Marconi, terinspirasikan temuan Hertz, dan lahirlah radio
pertama melalui kreasinya.
Radio mentransmisi dan menerima sinyal melalui area luas dalam bentuk
gelombang elektromagnetik, pada tingkat frekuensi tertentu yang berbeda dengan
gelombang elektromagnetis lainnya, seperti spektrum inframerah dan sinar
rontgen (x-rays).
Jaringan wireless menggunakan gelombang radio (Radio Frequency/RF)
untuk melakukan komunikasi data antara transmitter dan receiver. Komunikasi
data merupakan proses pentransmisian data secara elektronik melalui media
berupa kabel maupun tanpa kabel (nirkabel). Transmisi data adalah proses yang
terjadi antara transmitter dan receiver melalui suatu media transmisi yang
diklasifikasikan menjadi dua bagian yaitu guided media dan unguided media.
Apabila guided media mengacu pada media transmisi fisik berupa kabel
sedangkan unguided media mengacu pada transmisi nirkabel. Tujuan dari sebuah
sistem komunikasi data adalah pertukaran data secara elektronik antara dua belah
pihak. Secara umum, model komunikasi data dapat diilustrasikan seperti pada
gambar 2.7 yang merupakan model komunikasi data yang disederhanakan.
Gambar 2.7 Model Komunikasi Data Nirkablel
Sistem komunikasi wireless dengan frekuensi radio terdiri dari
perangkat-perangkat yang diantaranya adalah :
1. Data (input)
2. Modem (modulator dan demodulator)
3. transmitter (pemancar)
4. Receiver (penerima) Sumber Transmitter Media
1.Data (Input)
Data dalam komunkasi wireless ini bisa berupa video, audio, dan data-data yang
lain. Dalam penelitian ini data yang masuk ke transmitter adalah berupa data
digital yaitu data ASCII dari mikrokontroler.
2. Modem (modulator dan demodulator)
Modulasi adalah proses perubahan (varying) suatu gelombang periodik
sehingga menjadikan suatu sinyal mampu membawa suatu informasi. Dengan kata
lain modulasi adalah proses modifikasi sinyal carrier terhadap sinyal input,Sinyal
informasi (suara, gambar, data), agar dapat dikirim ke tempat lain, sinyal tersebut
harus ditumpangkan pada sinyal lain. Dengan proses modulasi, suatu informasi
(biasanya berfrekuensi rendah) bisa dimasukkan ke dalam suatu gelombang
pembawa, biasanya berupa gelombang sinus berfrekuensi tinggi. Terdapat tiga
parameter kunci pada suatu gelombang sinusiuodal yaitu : amplitudo, fase dan
frekuensi.
Ketiga parameter tersebut dapat dimodifikasi sesuai dengan sinyal informasi
(berfrekuensi rendah) untuk membentuk sinyal yang termodulasi.Peralatan untuk
melaksanakan proses modulasi disebut modulator, sedangkan peralatan untuk
memperoleh informasi informasi awal (kebalikan dari dari proses modulasi)
disebut demodulator dan peralatan yang melaksanakan kedua proses tersebut
disebut modem.
Berikut beberapa tujuan dari Modulasi:
1. Transmisi menjadi efisien atau memudahkan pemancaran.
2. Menekan derau atau interferensi.
3. Untuk memudahkan pengaturan alokasi frekuensi radio.
4. Untuk multiplexing: proses penggabungan beberapa sinyal informasi untuk
3.Transmitter (Tx)
Transmitter merupakan interface yang memodulasi bit stream digital ke
dalam bentuk gelombang yang tepat, mampu mempropogasikan gelombang
tersebut melalui saluran komunikasi.
Transmitter adalah bagian dari sistem komunikasi wireles yang berfungi untuk
mengirimkan data ke tempat lain berupa gelombang radio. Dalam perancangan
alat ini, transmitter yang digunakan adalah Modul RF transmitter 1020U.
4.Receiver (Rx)
Receiver merupakan bagian yang berfungsi untuk menerima sinyal atau
data yang dikirimkan oleh transmitter (pemancar). Pada dasarnya pada bagian
penerima komponen yang digunakan adalah antenna, antenna inilah yang
mengubah gelombang elektromagnetik dari media kabel ke ruang bebas dan
sebaliknya dari ruang bebas ke media kabel.Dalam perancangan alat ini, receiver
yang digunakan adalah Modul RF receiver 1020U.
2.3.4 Transmisi sinyal digital
Proses transmisi data selalu dikonversi menjadi sinyal terlebih dahulu. Data
tersebut bisa berbentuk data analog dan data digital. Dalam penelitian data yang
akan ditransmisikan melalui gelombang radio adalah data ASCII yang merupakan
data digital. Sinyal juga dapat berupa sinyal analog dan sinyal digital. Transmisi
baseband adalah representasi data analog atau data digital menjadi sinyal digital
pada proses transmisi. Sedangkan passband adalah representasi data analog atau
data data digital menjadi sinyal analog pada proses transmisi. Transmisi passband
ditandai dengan pergeseran frekuensi dari frekuensi data data yang umumnya
rendah menjadi frekuensi sinyal yang tinggi sesuai dengan frekuensi gelombang
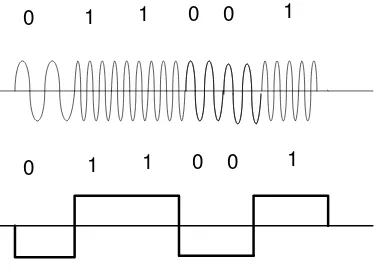
2.3.4.a FSK (Frequency Shift Keying)
Frequency Shift Keying atau pengiriman sinyal melalui pergeseran
frekuensi. Metode ini merupakan suatu bentuk modulasi yang memungkinkan
gelombang modulasi menggeser frekuensi output gelombang pembawa.
Pergeseran ini terjadi antara harga harga yang telah ditentukan semula dengan
gelombang output yang tidak mempunyai fasa terputus-putus. Dalam proses
modulasi ini besarnya frekuensi gelombang pembawa berubah-ubah sesuai
dengan perubahan ada atau tidak adanya sinyal informasi digital. FSK merupakan
metoda modulasi yang paling populer. Dalam proses ini gelombang pembawa
digeser keatas dan kebawah untuk memperoleh bit 1 dan bit 0. Kondisi ini masing
masing disebut space dan mark. Keduanya merupakan standar transmisi data.
0 1 1 0 0 1
1 1 0 0 1
0
Gambar 2.8 Modulasi FSK
Selain penggunaan kekuatan sinyal yang tidak efisien, amplitudo sinyal
termodulasi konvensional yang memiliki satu karakteristik yang tidak diinginkan
lainnya. Menurut definisi, amplitudo sinyal termodulasi menggunakan beberapa
level sinyal, yang berarti AM cukup rentan terhadap sinyal saturasi yang
mempersempit jarak antara tingkat amplitudo dan menghasilkan spektrum
menyebar. Sebuah sumber umum dari batas ketahanan dalam sistem radio terjadi
pada power amplifier output pemancar. Dalam kebanyakan kasus amplifier output
dioperasikan kurang dari daya maksimum untuk menghilangkan batas ketahanan
amplitudo. Sudut sistem modulasi, modulasi frekuensi (FM) atau modulasi fase
(PM) menggunakan sinyal amplitudo konstan tidak terpengaruh oleh sinyal
saturasi.. Karena itu FM dan PM dapat ditransmisikan pada tingkat daya paling
tinggi daripada kemampuan sistem AM. Kemampuan untuk menggunakan daya
tahan power amplifier merupakan salah satu alasan mengapa FM awalnya dipilih
untuk analog microwave radios. Bagian ini membahas modulasi frekuensi digital,
sering disebut sebagai pergeseran frekuensi Keying (FSK). Bagian berikutnya
membahas modulasi fase digital, sering disebut sebagai pergeseran fasa keying
(PSK). Kedua sistem memberikan sinyal amplitudo konstan. Sistem menggunakan
operator amplitudo konstan juga disebut sistem amplop sebagai konstan.
2.3.4.b Demodulasi FSK (Frequency Shift Keying)
Demodulasi adalah Proses konversi sinyal analog ke sinyal digital.
Alatnya dinamakan demodulator. Demodulasi mempunyai fungsi kebalikan dari
modulasi yaitu proses mendapatkan kembali data atau proses membaca data dari
sinyal yang diterima dari pengirim. Dalam demodulasi, data digital dipisahkan
dari sinyal pembawa frekuensi tinggi. Pada demodulasi digital (FSK) adalah
proses mendapatkan kembali data digital dengan proses pemisahan data digital
dengan sinyal pembawa (sinyal carrier) dengan tujuan agar data digital tersebut
dapat terbaca dibagian penerima.
2.3.4.c Modul RF Transceiver 1020U
Peralatan jaringan wireless yang digunakan dalam Modul RF Transceiver
KYL 1020U terintegrasi receiver dan transmitter dengan sistem modulasi
Frequency Shift Keying (FSK) dengan High anti interference dan Low BER (Bit
Gambar 2.9 Modul RF Transceiver KYL 1020U
Modul ini dapat mengirimkan dan menerima data serial dengan frekuensi
433/450/868/915 MHz dan baud rate air sebesar 1200/2400/4800/9600/19200 bps.
Penggunaan modul tersebut sangat praktis karena dari segi ukuran cukup kecil.
Modul tersebut bekerja dengan power supply antara 3,3 sampai 5 VDC. Dalam
satu modul bisa digunakan sebagai pengirim dan sekaligus penerima. Data serial
yang akan dipancarkan melalui RF diumpankan ke modul KYL 1020U oleh
mikrokontroler secara serial.
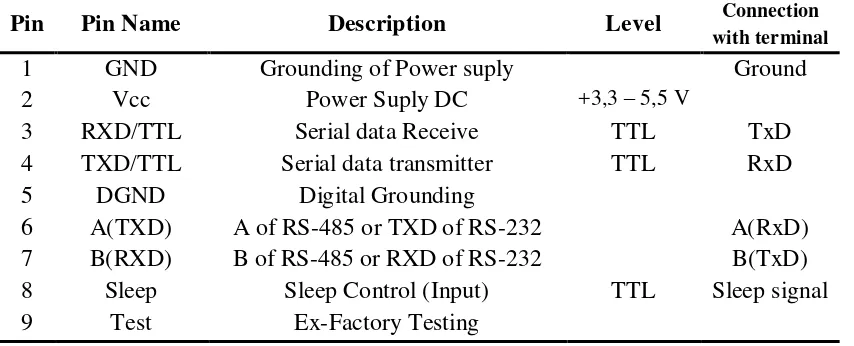
Berikut deskripsi Interface RF KYL 1020U :
Tabel 2.2 Deskripsi interface RF KYL 1020U
Pin Pin Name Description Level Connection
with terminal
1 GND Grounding of Power suply Ground 2 Vcc Power Suply DC +3,3 – 5,5 V
3 RXD/TTL Serial data Receive TTL TxD 4 TXD/TTL Serial data transmitter TTL RxD 5 DGND Digital Grounding
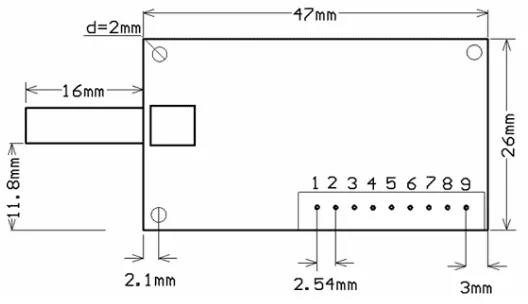
Dimensi ukuran RF KYL Transceiver 1020U
Gambar 2.10 Dimensi Ukuran RF
Konfigurasi PIN KYL Transmitter 1020U dengan Mikroprosesor
PB0 PA0
Konfigurasi PIN KYLReceiver 1020U dengan Konektor DB 9 Untuk ke PC
Gambar 2.12 Konfigurasi Pin KYL Receiver
2.3.5 Full-Duplex dan Half-Duplex
Hampir sebagian besar sistem komunikasi beroperasi dengan cara half-duplex atau
full-duplex. Sistem komunikasi half-Duplex dapat mengirimkan data secara bolak
balik (dua arah), tetapi pada satu saat hanya dapat mengirimkan data pada satu
arah saja. Proses untu mengubah arah pengiriman memerlukan tambahan
perangkat lunak, dan memerlukan waktu yang disebut turn around time. Dalam
beberapa hal, turnaround time berkisar sampai beberapa milidetik, apabila sering
terjadi akan menurunkan unjuk kerja rangkaian.
Rangkaian full-duplex adalah rangkaian yang dapat mengirimkan data
dalam dua arah pada waktu yang sama. Dalam beberapa hal, dua kanal yang
terpisah digunakan untuk pengiriman pada masing masing arah. Seringkali,
komunikasi full duplex digunakan untuk mengirimkan data meskipun
sesungguhnya tidak perlu pengiriman data secara serentak pada kedua arah
tersebut. Ini dilakukan untuk memperkecil turna-round time yang berakibat
menurunnya waktu tanggapan dari computer yang digunakan. Jaringan-jaringan
komputer yang menggunakan komputer mini, atau mikro, juga sering
Frequency KYL transceiver 1020U sistem komunikasi data yang digunakan
bersifat half-duplex.
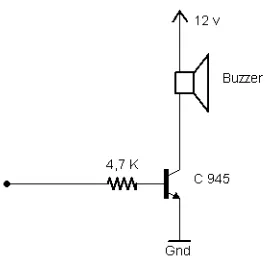
2.4 Buzzer
Buzzer adalah komponen yang berfungsi mengubah energi listrik menjadi
energi suara/bunyi.Fungsi buzzer adalah sebagai komponen yang memberikan
sinyal peringatan. Buzzer yang digunakan akan mengeluarkan suara sekitar 1 KHz
dengan durasi tertentu. Buzzer dikendalikan oleh sebuah penguat arus dalam hal
ini adalah transistor seperti pada gambar 3.7 dengan memberikan logika 1 pada
basis transistor akan menjenuhkan transistor sehingga arus akan mengalir dari
sumber ke buzzer dan sebaliknya logika 0 akan memutuskan arus buzzer.
Gambar 2.13 Skematik Buzzer
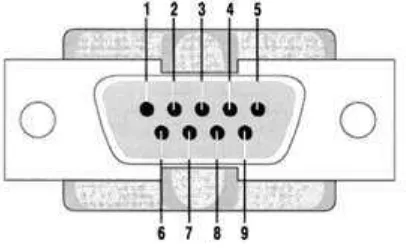
2.5 Komunikasi serial DB 9
Untuk mendapatkan keserbacocokan (compatibility) dari beberapa peralatan
komunikasi data dari berbagai pabrik, diciptakanlah standar antar-muka
(interfacing) yang dinamakan RS232. Standar ini dipublikasikan oleh EIA
(Electronics Industries Association) pada 1960. Pada 1963 standar tersebut
dimodi_kasi dengan nama RS232A. RS232B dan RS232C ditetapkan pada tahun
masing-masing 1965 dan 1969. Pada buku ini kita akan mengacu pada standar
RS232 paling dasar. Sekarang Standar RS232 masih menjadi standar dunia
mengenai standar antar-muka I/O komunikasi serial. Bahkan standar ini masih
Pada RS232, logika 1 (high) direpresentasikan dengan tegangan -3 s/d -25V, dan
logika 0 (low) direpresentasikan sebagai +3 s/d +25V. Sedang diantara -3 dan
+3V dianggap sebagai status mengambang dan tidak dianggap.
Gambar 2.14 Konektor Serial DB 9
Tabel 2.3 Konfigurasi Konektor DB 9
Nomor
Pin Nama Sinyal Direction Direction
1 DCD In Data Carrier Direct
2 RxD In Receive Data
3 TxD Out Transmit Data
4 DTR Out Data Terminal Ready
5 GND - Ground
6 DSR In Data Set Ready
7 RTS Out Request to Send
8 CTS In Clear to Send
9 RI In Ring Indicator
Perangkat yang menggunakan kabel serial untuk komunikasinya dibagi ke dalam
dua kategori. Yaitu DCE (Data Communications Equipment) dan DTE (Data
Terminal Equipment). Data Communications Equipment adalah perangkat seperti
modem, TA adapter, plotter dan lain-lain, sedangkan Data Terminal Equipment
adalah Computer anda atau Terminal. Untuk menjamin terjadinya sebuah transfer
dengan baik. Tidak seperti printer yang selalu mencetak setiap karakter yang
diterimanya. Namun dalam komunikasi serial, bisa saja peralatan tidak memiliki
lagi tampungan data yang diterimanya. Sehingga dia harus memberitahukan PC
untuk tidak lagi mengirim data. Hingga modem selesai mengerjakan semua
tugasnya. Dan kembali memberitahukan PC untuk kembali mengirim data
berikutnya setelah modem siap.
2.6 Personal Computer (PC)
Personal Komputer adalah seperangkat komputer yang digunakan oleh satu orang
saja/ pribadi. Fungsi utama dari PC adalah untuk mengolah data input dan
menghasilkan output berupa data/informasi sesuai dengan keinginan user
(pengguna).
Dalam pengolahan data yang dimulai dari memasukkan data (input)
sampai akhirnya menghasilkan informasi. Data inputan itu merupakan hasil
pengukuran yang telah dideteksi oleh sensor dan dibaca oleh mokrokontroler
dikirim melalui Modul RF Transceiver 1020U dan selanjutnya dikirim ke PC
melalui konektor DB-9. Dalam penelitian ini PC sangat berperan penting untuk
memonitoring level ketinggian air pada waduk dan akan divisualisasi dengan
BAB III
PERANCANGAN DAN SISTEM KERJA RANGKAIAN
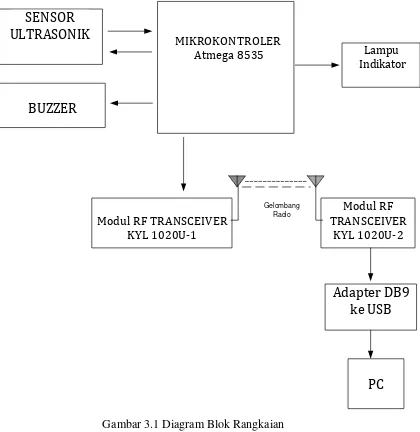
3.1 Diagram Blok
Diagram Blok merupakan dasar dari sistem rangkaian yang menggambarkan
sistem kerjanya beserta fungsi-fungsinya. Berikut diagram blok sistem yang telah
dirancang pada gambar 3.1 dibawah ini :
SENSOR
ULTRASONIK
MIKROKONTROLERAtmega 8535
Modul RF TRANSCEIVER
KYL 1020U-1
PC
BUZZER
Lampu Indikator
Modul RF TRANSCEIVER
KYL 1020U-2
Gelombang Radio
Adapter DB9
ke USB
Desain sistem rangkaian terdiri dari :
1. Sensor Ultrasonik yang berfungsi untuk mendeteksi ketinggian air.
2. Modul RF KYL 1020U yang berfungsi sebagai modul transmitter dan
sekaligus modul receiver yang berfungsi untuk mengirimkan dan
menerima data dengan menggunakan gelombang radio.
3. Mikrokontroler yang digunakan adalah mikrokontroler ATmega 8535
yang merupakan pusat dan sebagai pengontrol semua sistem kerja
rangkaian.
4. Personal Computer (PC) merupakan Komputer yang memonitoring dari
jarak jauh ketinggian air yang akan dikirim menggunakan gelombang
radio.
5. Buzzer merupakan alat yang berfungsi untuk pemberi tanda atau
peringatan berupa bunyi.
6. Lampu Indikator merupakan lampu indikator sebagai pertanda level
ketinggian air.
Sistem kerja dari diagram blok diatas adalah :
1. Level ketinggian airpada waduk dideteksi oleh sensor ultrasonik.
2. Dibaca oleh mikrokontroler, dan data serial pada mikrokontroler tersebut
dikirim ke Modul RF Transceiver KYL 1020U-1. Dalam hal ini Modul RF
tersebut berfungsi sebagai Modul RF Transmitter secara serial.
3. Kemudian Data dikirim melalui Antena melalui media transmisi gelombang
radio dan akan ditangkap oleh Antena Modul RF Transceiver KYL 1020U-2.
Dalam hal ini Modul RF tersebut berfungsi sebagai Modul RF Receiver.
4. Pada Modul RF Transceiver KYL 1020U telah terintegrasi IC MAX 232.
Supaya dapat dihubungkan ke PC kita menggunakan konektor DB 9 dan
Apabila pada PC tidak ada female DB 9 maka kita menggunakan Konverter
USB to serial.
5. Proses tersebut akan terus berjalan sampai pada ketinggian air berada pada
posisi Level 5 dan Mikrokontroler juga mengatur lampu indikator sesuai level
yang telah ditentukan dan buzzer akan berbunyi pada saat zona berbahaya
3.2 Rangkaian Mikrokontroler ATmega 8535
Pada alat ini, mikrokontroler yang digunakan adalah mikrokontroler ATmega
8535 yang berfungsi untuk membaca level ketinggian air yang dideteksi oleh
sensor ultrasonik. Rangkaian mikrokontroler ditunjukkan pada gambar berikut :
Gambar 3.2 Diagram Blok Rangkaian Mikrokontroler ATmega 8535
Mikrokontroler ATmega 8535 merupakan mikrokontroler 8 bit teknologi CMOS
dengan konsumsi daya rendah yang berbasis arsitektur enhanced RISC AVR.
Mikrokontroler ini menyediakan fitur-fitur seperti 8K byte memori In-system
Programmable Flash dengan kemampuan Read-While-Write, 512 byte
EEPROM, Port I/O 32 bit yang dikelompokkan dalam Port A, Port B, Port C dan
Port D, Analog to Digital Converter 10-bit sebanyak 8 input, Timer/Counter
sebanyak 8 buah, Analog Comparator, Komunikasi serial standar USART dengan
kecepatan maksimal 2,5 Mbps dan dengan frekuensi clock maksimum 16 MHz.
Pada gambar tersebut terlihat fungsi fungsi pin mikrokontroler ATmega 8535
pin 29 PC7(TOSC2) : untuk sensor ultrasonik
pin 28 PC6 (TOSC1) : untuk sensor ultrasonik
pin 23 PC1 : untuk lampu indikator warna hijau.
Pin 24 PC2 : untuk lampu indikator warna orange.
Pin 25 PC3 : untuk lampu indikator warna orange.
Pin 26 PC4 : untuk lampu indikator warna orange.
Pin 27 PC5 : untuk lampu indikator warna merah.
Pin 15 PD1 (TXD) : untuk rangkaian receiver KYL 1020U
Pin 14 PD0 (RXD) : untuk rangkaian transmitter KYL 1020U
Pada Alat ini mikrokontroler berfungsi untuk membaca hasil deteksian sensor
ultrasonik dan mengubahnya ke bentuk data digital. Setelah itu data akan dikirim
ke PC menggunakan Modul RF transceiver KYL 1020U.
3.3Rangkaian skematik power supply
Power suply merupakan pensupplay tegangan dan arus ke seluruh rangkaian yang
ada dimana power suply ini memiliki dua keluaran yaitu untuk tegangan 5 Volt
dan 12 Volt. Keluaran 5 Volt digunakan untuk menghidupkan dan mengaktifkan
seluruh rangkaian kecuali rangkaian ADC, keluaran 12 Volt digunakan untuk
mensupplay tegangan ke rangkaian ADC. Hal itu disebabkan karena rangkaian
ADC memerlukan tegangan input sebesar 12 Volt agar tegangan refrensinya
stabil.
Trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt
AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan dengan
menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
Gambar 3.3 Rangkaian Skematik Power Supply
LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP
TIP 32 disini berfungsi sebagai penguat arus apabila terjadi kekurangan arus pada
rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil
dari keluaran jembatan dioda.
3.4Rangkaian Buzzer
Gambar 3.4 Rangkaian Buzzer
Buzzer adalah komponen yang berfungsi mengubah energi listrik menjadi energi
suara/bunyi. Fungsi buzzer adalah sebagai komponen yang memberikan sinyal
peringatan. Buzzer yang digunakan akan mengeluarkan suara sekitar 1 KHz
dengan durasi tertentu. Buzzer dikendalikan oleh sebuah penguat arus dalam hal
ini adalah transistor seperti pada gambar 3.4 dengan memberikan logika 1 pada
basis transistor akan menjenuhkan transistor sehingga arus akan mengalir dari
3.5 Sensor Ultrasonic SR04
Gambar 3.5 Rangkaian Sensor Ultrasonik SR04
Ultrasonic modul umunya berbentuk papan elektronik ukuran kecil dengan
beberapa rangkaian elektronik dan 2 buah transducer. Dari 2 buah transducer ini,
salah satu berfungsi sebagai transmitter dan satu lagi sebagai receiver. Ada juga
modul yang hanya mempunyai 1 buah transducer, berfungsi sebagai transmitter
dan receiver sekaligus. Tersedia pin VCC, TRIG, ECHO dan GND. Ada juga
modul yang pin TRIG dan ECHO-nya digabung menjadi satu dan pemakaiannya
berganti-ganti.
Modul ultrasonik ini bekerja dengan cara menghasilkan gelombang suara pada
frekuensi tinggi, yang kemudian dipancarkan oleh bagian transmitter. Pantulan
gelombang suara yang mengenai benda di depannya akan ditangkap oleh bagian
receiver. Dengan mengetahui lamanya waktu antara dipancarkannya gelombang
suara sampai ditangkap kembali, kita dapat menghitung jarak benda yang ada di
depan modul tersebut. Kita mengetahui kecepatan suara adalah 340 m/detik.
Lamanya waktu tempuh gelombang suara dikalikan kecepatan suara, kemudian
dibagi 2 akan menghasilkan jarak antara ultrasonic modul dengan benda
3.6Rangkaian PSA Rangkaian Penerima
Gambar 3.6 Rangkaian PSA Rangkaian Penerima
Pada rangkaian penerima (receiver), harus digunakan sumber tegangan PSA
(Power Suply Adjust) dimana PSA ini hanya menghasilkan tegangan keluaran 5
Volt. Sumber tegangan yang diberikan untuk PSA ini supaya dapat bekerja adalah
baterai 9 Volt. PSA ini berfungsi sebagai pensuplay tegangan pada rangkaian
penerima RF Transceiver KYL 1020U sehingga modul tersebut dapat bekerja
dengan baik.
3.7Rangkaian Pemancar (Transmitter) RF Transceiver KYL 1020U
Pada Modul RF Transmitter telah disediakan pin TXD yang akan dihubungkan ke
mikrokontroler yaitu sebagai saluran untuk pengiriman data dari mikrokontroler
ke RF Transmitter. Data yang dikirim merupakan data hasil pendeteksian sensor
ultrasonic terhadap level ketinggian air.
Pada bagian transmitter ini, komunikasi yang digunakan adalah
komunikasi serial asinkron (Transmisi Data Asynchronous). Data serial yang
dikirim dari mikrokontroler merupakan data ASCII yang merupakan data digital.
Setelah Data ASCII dari mikrokontroler dikirim ke RF Transmitter maka data
tersebut akan dimodulasi dengan tujuan supaya transmisi data menjadi efisien dan
memudahkan pemancaran. Data tersebut merupakan data digital yang akan
yang melewatkan sinyal informasi pada Low-pass filter dan sebelum proses
modulasi sinyal menggunakan modulator FSK (Frequency Shift Keying) yang
kemudian dikuatkan dan dipancarkan melalui saluran transmisi gelombang radio.
Gambar 3.7 Rangkaian Pemancar RF Transceiver KYL 1020U
Prinsip kerjanya adalah Sinyal carrier (sinyal pembawa) dan data digital akan
melewati Modulator. Modulator berfungsi untuk menumpangkan data serial
digital dengan sinyal pembawa (sinyal carrier). Sinyal pembawa tersebut berupa
sinyal analog yang berbentuk gelombang sinusoidal. Proses ini dinamakan proses
modulasi digital dimana sinyal informasinya berbentuk digital dan sinyal
pembawanya adalah sinyal analog.
Diagram blok Rangkaian Pemancar (transmitter) :
Sinyal carrier dan
Data Digital (Data ASCII) MODULATOR
PENGUAT RF ANTENA TRANSMITTER
Gambar 3.8 Diagram Blok Rangkaian Transmitter
Modulasi digital tersebut merupakan proses penumpangan sinyal masukan
diperkuat di penguat RF frekuensi lebih tinggi. Setelah itu dipancarkan ke udara
melalui pemancar (Antena) yaitu melalui media transmisi gelombang radio.
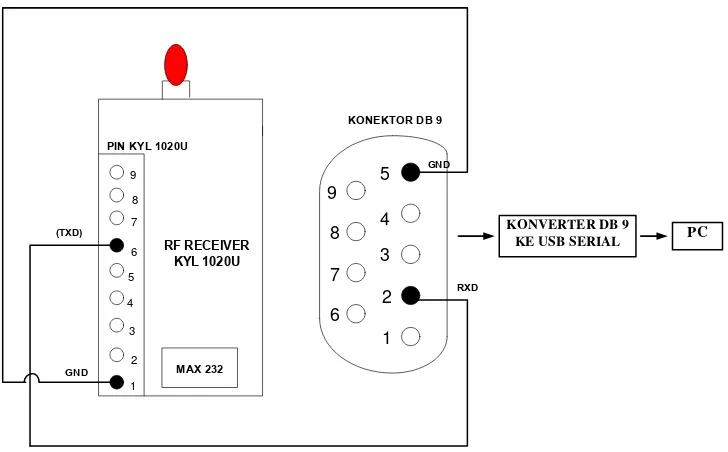
3.8Rangkaian Penerima (Receiver) RF Transceiver KYL 1020U
Pada Modul RF Receiver telah disediakan pin RXD yang akan dihubungkan ke
mikrokontroler yaitu sebagai saluran untuk penerimaan data dari RF Transmitter
melalui Radio frekuensi yang menggunakan gelombang radio. Data yang diterima
merupakan data hasil pendeteksian sensor ultrasonik terhadap level ketinggian air.
Setelah itu data akan dikirim ke PC dengan menggunakan pengiriman secara
serial yaitu DB 9 serial.
Gambar 3.9 Rangkaian Penerima RF Transceiver KYL 1020U
Prinsip kerjanya adalah sinyal carrier atau sinyal pembawa berupa sinyal
analog dan data digital akan diterima oleh antenna kemudian didemodulasi
Frequency Shift Keying (FSK). Pada demodulasi FSK adalah proses mendapatkan
kembali data digital dengan proses pemisahan data digital dengan sinyal pembawa
(sinyal carrier) dengan tujuan agar data digital tersebut dapat terbaca dibagian