commit to user
KAJIAN DYNAMIC GAIT BAGI PENGGUNA
PROSTHETIC ATAS LUTUT ENDOSKELETAL
SISTEM ENERGY STORING DENGAN MEKANISME 2 BAR
Skripsi
Sebagai Persyaratan Untuk Memperoleh Gelar Sarjana Teknik
FERLIANA HERAWATI BERNADHETA
I0306002
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK
UNIVERSITAS SEBELAS MARET
commit to user
I-1
BAB I
PENDAHULUAN
1.1 LATAR BELAKANG
Prosthetic merupakan alat pengganti anggota gerak bawah yang telah
hilang atau diamputasi yang dibuat untuk menunjang fungsi dari anggota gerak
bawah bagi amputee. Prosthetic yang ada saat ini adalah prosthetic eksoskeletal
dan prosthetic endoskeletal. Prosthetic eksoskeletal pada umumnya dibuat dari
bahan yang ringan namun kuat dan kokoh. Bahan yang sering dipakai misalnya
plastik, aluminium dan kayu. Pada prosthetic endoskeletal, terdapat tambahan
tumpuan yang berupa tonggak untuk lebih memperkokoh dan memudahkan
pemindahan beban dari socket ke bagian foot. Tonggak pada prosthetic
endoskeletal biasanya terbuat dari metal pylon agar penampilan menyerupai kaki
yang sebenarnya (May, 2002).
Di Negara maju, perkembangan prosthetic endoskeletal sangat pesat.
Prosthetic endoskeletal mampu digunakan untuk melakukan aktivitas ekstrim. Di
Indonesia prosthetic endoskeletal masih jarang dan belum mampu digunakan
untuk aktivitas yang ekstrim seperti berjalan naik-turun tangga, jalan cepat atau
berlari, menendang, dan panjat tebing. Berdasarkan kekurangan pada model
prosthetic saat ini, Laboratorium Perancanaan dan Perancangan Produk Jurusan
Teknik Industri Universitas Sebelas Maret (2010) telah mengembangkan
prosthetic model endoskeletal dengan menerapkan konsep energy storing. Energy
storing prosthetic merupakan salah satu teknologi yang menunjang fleksibilitas
gerak amputee pengguna prosthetic endoskeletal. Prosthetic endoskeletal sistem
energy storing mekanisme 2 bar merupakan jenis above knee prosthetic yang
dirancang dengan menambahkan komponen gas spring pada sendi lutut dengan
mekanisme pergerakan sendi dibantu oleh 2 buah bar (penghubung). Konsep
energy storing dianalogikan sebagai sebuah pegas yang menyimpan dan kemudian
melepaskan energi. Gerakan meregang dan mengendur pada gas spring inilah
yang diharapkan mampu mengurangi jumlah kerja yang harus dilakukan penderita
commit to user
I-2
Prosthetic atas lutut endoskeletal sistem energy storing mekanisme 2 bar
memilki peran secara spesifik pada saat kaki mengayun. Hal ini terjadi dalam
fase-fase tertentu pada siklus berjalan. Pada dasarnya, satu siklus berjalan terdiri
dari dua kelompok yaitu fase berdiri (stance phase) di mana 60% dari siklus kaki
kontak dengan tanah meliputidan fase berayun (swing phase) di mana 40% kaki
berayun di udara (Franken, 2005). Dua kelompok pada satu siklus berjalan terbagi
menjadi delapan fase, fase berdiri terdiri dari fase initial contact, loading
response, midstance, dan terminal stance, sedangkan fase berayun terdiri dari fase
pre-swing, initial swing, mid swing dan terminal swing (Whittle, 2007). Ketika
berjalan, energi disimpan saat stance phase dan dilepaskan pada posisi swing
phase. Kemampuan menyimpan energi penting untuk menyediakan gaya yang
cukup bagi keseluruhan kaki untuk bergerak secara efisien (May, 2002).
Konsep energy storing dapat mereduksi energi untuk berjalan antara 20%
sampai 40% (Farber dkk, 1995). Bagian terpenting pada gerakan berjalan dari
pengguna prosthetic adalah keseimbangan beban tubuh amputee (Radcliffe dan
Foort, 1961). Oleh karena itu, penelitian ini diarahkan untuk menganalisis
kemampuan prosthetic endoskeletal sistem energy storing mekanisme 2 bar pada
bidang datar melalui kajian dynamic gait. Kajian dynamic gait merupakan analisis
gerakan berjalan manusia secara kontinu dengan memperhitungkan waktu yang
digunakan oleh manusia untuk melakukan satu siklus gerakan berjalan normal
(Vaughan, 1999). Dynamic gait analysis juga memperhitungkan kecepatan dan
percepatan manusia saat melakukan aktivitas berjalan ini untuk menentukan besar
usaha (work), energi dan torsi yang diperlukan amputee pengguna prosthetic
endoskeletal dengan energy storing untuk bergerak dari satu titik ke titik lainnya
dalam satu siklus berjalan. Komparasi nilai kuantitatif external work, serta
komponen gaya dan torsi yang dihasilkan amputee pengguna prosthetic
endoskeletal sistem energy storing knee mekanisme 2 bar, antara kaki normal
dengan kaki prosthetic, saat berjalan pada bidang datar dapat digunakan untuk
mengetahui kemampuan prosthetic endoskeletal sistem energy storing knee
commit to user
I-3
1.2 PERUMUSAN MASALAH
Berdasarkan latar belakang dapat dirumuskan permasalahan dalam
penelitian ini adalah bagaimana kemampuan prosthetic atas lutut endoskeletal
sistem energy storing dengan mekanisme 2 bar pada aktivitas berjalan di bidang
datar dengan kajian dynamic gait.
1.3 TUJUAN PENELITIAN
Adapun tujuan dalam penelitian ini adalah mengetahui kemampuan
prosthetic atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar
pada aktivitas berjalan di bidang datar dengan kajian dynamic gait. Sub tujuan
dari penelitian ini, yaitu:
1. Membuat model fase berjalanpada pengguna prosthetic atas lutut endoskeletal
sistem energy storing dengan mekanisme 2 bar menggunakan persamaan
gerak Lagrange.
2. Menentukan nilai external work dan komponennya (torsi dan gaya) berdasar
model persamaan gerak yang diturunkan dalam satu siklus berjalan di
permukaan datar.
1.4 MANFAAT PENELITIAN
Manfaat yang diperoleh dari pelaksanaan penelitian ini yaitu
pengembangan rancangan dan teknologi prosthetic dari data yang diperoleh saat
aktivitas berjalan amputee pada bidang datar melalui kajian dynamic gait.
1.5 BATASAN MASALAH
Batasan masalah ini untuk membatasi permasalahan agar tidak terlalu luas
dan memperjelas obyek yang diamati. Batasan masalah yang digunakan dalam
penelitian ini, sebagai berikut:
1. Pengambilan data dilakukan terhadap satu pasien laki-laki usia 49 tahun
pengguna prosthetic kaki atas lutut saat gerakan berjalan pada bidang datar.
2. Satu siklus gerakan berjalan dibagi menjadi delapan fase gerakan (Whittle,
2007).
3. Kajian dynamic gait yang digunakan untuk memodelkan fase berjalan pada
commit to user
I-4
4. Saat pengambilan data, amputee yang telah menggunakan prosthetic atas lutut
endoskeletal sistem energy storing dengan mekanisme 2 bar masih
menggunakan alat bantu paralel bar saat melakukan aktivitas berjalan.
1.6 ASUMSI PENELITIAN
Asumsi-asumsi yang digunakan pada penelitian dynamic gait bagi pengguna
prosthetic atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar,
sebagai berikut:
1. Tidak ada selip antara kaki dengan landasan yang terjadi saat aktivitas
berjalan.
2. Anggota upper body (kepala, leher, tangan, dan batang tubuh) pengguna
prosthetic dianggap sebagai satu kesatuan beban bagi anggota gerak bawah.
3. Sudut yang terbentuk pada bagian hip joint diasumsikan bernilai konstan 90⁰
untuk semua fase gerakan dalam satu siklus berjalan.
4. Delapan siklus berjalan yang digunakan dalam perhitungan persamaan gerak
Lagrange diambil dari rekaman gerakan berjalan terbaik dan terlatih amputee
saat menggunakan prosthetic atas lutut endoskeletal sistem energy storing
dengan mekanisme 2 bar pada bidang datar.
1.7 SISTEMATIKA PENELITIAN
Penyusunan tugas akhir ini, disusun secara sistematis dan berisi uraian pada
setiap bab untuk mempermudah pembahasannya. Adapun dari pokok-pokok
permasalahan dalam penelitian ini dapat dibagi menjadi enam bab, seperti
dijelaskan di bawah ini.
BAB I PENDAHULUAN
Bab ini menguraikan latar belakang masalah diadakannya penelitian,
perumusan masalah bedasarkan latar belakang masalah penelitian yang
diangkat, tujuan penelitian, manfaat penelitian, batasan masalah,
asumsi-asumsi dan sistematika penelitian. Pengantar penelitian yang
dijabarkan dalam bab ini dimaksudkan memberikan arah penelitian
sesuai tujuan, manfaat dan asumsi yang diajukan, menjawab
commit to user
I-5
bagi pengguna prosthetic atas lutut endoskeletal sistem energy storing
dengan mekanisme 2 bar.
BAB II TINJAUAN PUSTAKA
Bab ini menguraikan teori yang digunakan sebagai dasar pemikiran,
wawasan dan acuan serta sebagai landasan yang memberikan
penjelasan secara garis besar mengenai metode yang digunakan sebagai
kerangka pemecahan masalah. Tinjauan pustaka meliputi buku, jurnal,
karya ilmiah, maupun berbagai sumber lainnya. Teori yang berupa
penjelasan mengenai prinsip biomekanika anggota gerak bawah,
prosthetic, teknologi gas spring, kajian usaha (work), energi dan torsi
pada segmentasi tubuh manusia.
BAB III METODOLOGI PENELITIAN
Metodologi menguraikan materi penelitian, alat, tata cara penelitian,
variabel dan data yang dikaji serta cara analisis yang dipakai untuk
menarik kesimpulan. Kerangka metodologi penelitian disusun mulai
dari tahap identifikasi permasalahan awal, tahap pengumpulan dan
pengolahan data, penentuan external work dan energi serta nilai torsi
pada setiap joint pengguna prosthetic atas lutut endoskeletal dengan
memperhatikan fungsi energy storing.
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA
Bab ini menjelaskan proses pengumpulan dan pengolahan data yang
diperoleh selama pelaksanaan penelitian, sesuai dengan usulan
permasalahan yang diangkat. Data yang dikumpulkan berupa data
anthropometri amputee, data dimensi prosthetic endoskeletal dengan
energy storing, serta data pengukuran sudut (q) gerakan pada ankle,
knee dan hip joint saat fase berjalan dalam satu siklus gerakan.
Selanjutnya, data yang diperoleh diolah dengan menggunakan
pendekatan teori yang relevan dengan pokok permasalahan yang
dibahas dalam penelitian.
BAB V ANALISIS DAN INTERPRETASI HASIL
Tahap analisis dan interpretasi hasil berisi pembahasan permasalahan
commit to user
I-6
telah dilakukan pada bab sebelumnya. Bab ini menguraikan hasil
pengukuran besarnya external work dan energi serta nilai torsi pada
setiap joint dalam satu siklus gerakan berjalan guna menentukan tingkat
keseimbangan berjalan (equilibrium gait) pada pengguna prosthetic atas
lutut tipe endoskeletal.
BAB VI KESIMPULAN DAN SARAN
Bab ini merupakan tahap akhir penyusunan laporan penelitian yang
berisi uraian pencapaian tujuan penelitian yang diperoleh dari analisis
pemecahan masalah maupun hasil pengumpulan data serta saran-saran
commit to user
II - 1
BAB II
TINJAUAN PUSTAKA
Tinjauan pustaka mengenai kajian dynamic gait bagi pengguna prosthetic
atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar,
memerlukan dasar-dasar teori untuk menunjang pembahasan masalah dalam
penelitian.
2.1 BIOMEKANIKA
Berdasarkan Hamill dan Knutzen (2009), kajian biomekanika dapat dilihat
dalam dua perspektif yaitu kinematika dan kinetika. Studi kinematika menjelaskan
gerakan yang menyebabkan berapa cepat objek bergerak, berapa ketinggiannya
atau berapa jauh objek menjangkau jarak. Kajian gerakan kinetika menjelaskan
gaya yang menyebabkan gerakan. Dibandingkan dengan kajian kinematika, kajian
kinetika lebih sulit untuk diamati, pada kajian kinetik yang terlihat adalah akibat
dari gaya.
2.1.1 Definisi Biomekanika
Menurut Frankel dan Nordin (1980) dalam Chaffin dan Anderson (1999),
biomekanika merupakan ilmu mekanika teknik untuk analisa sistem kerangka otot
manusia dimana secara umum biomekanika didefinisikan, sebagai berikut:
Biomekanika menggunakan konsep fisika dan teknik untuk menjelaskan
gerakan pada bermacam-macam bagian tubuh dan gaya yang bekerja
pada bagian tubuh pada aktivitas sehari-hari.
Analisis biomekanika tubuh manusia dipandang sebagai sistem yang
terdiri dari link (penghubung) dan joint (sambungan), tiap link mewakili
segmen-segmen tubuh tertentu dan tiap joint menggambarkan sendi yang ada. Menurut
Chaffin dan Anderson (1999) tubuh manusia terdiri dari enam link, yaitu:
1. Link lengan bawah yang dibatasi oleh joint telapak tangan dan siku.
2. Link lengan atas yang dibatasi oleh joint siku dan bahu.
3. Link punggung yang dibatasi oleh joint bahu dan pinggul.
4. Link paha yang dibatasi oleh joint pinggul dan lutut.
5. Link betis yang dibatasi oleh joint lutut dan mata kaki.
commit to user
II - 2
Gambar 2.1 Tubuh sebagai sistem enam link dan joint Sumber: Chaffin dan Anderson, 1999
Segmen tubuh manusia dapat disetarakan dengan segmen benda jamak maka
panjang setiap link dapat diukur berdasarkan persentase tertentu dari tinggi badan,
sedangkan beratnya diukur berdasarkan persentase dari berat badan. Penentuan
letak pusat massa tiap link didasarkan pada persentase standar yang ada. Panjang
setiap link tiap segmen berotasi di sekitar sambungan dan mekanika terjadi
mengikuti hukum Newton. Prinsip ini digunakan untuk menyatakan gaya mekanik
pada tubuh dan gaya otot yang diperlukan untuk mengimbangi gaya-gaya yang
terjadi. Secara umum pokok bahasan dari biomekanika adalah mempelajari
interaksi fisik antara pekerja dengan mesin, material dan peralatan dengan tujuan
untuk meminimumkan keluhan pada sistem kerangka otot agar produktivitas kerja
dapat meningkat. Menghindari keluhan pada sistem kerangka otot dapat
ditanggulangi dengan melakukan pengendalian administratif (pemilihan personel
yang tepat, pelatihan tentang teknik-teknik penanganan material).
Pada gerakan jalan yang terpenting adalah keseimbangan dari pasien.
Gerakan ini memperlihatkan bagaimana kedua kaki saling menyeimbangkan berat
tubuh dalam pergerakan berpindah. Pengguna alat bantu pada kaki gerak terlihat
bagaimana alat bantu tersebut menyeimbangkan pasien dalam berjalan sehingga
alat tersebut nyaman dipakai.
2.1.2 Prinsip Biomekanika Anggota Gerak Bawah
Berdasarkan sistem sambungan bagian-bagian tubuh secara umum,
anggota gerak bawah terdiri dari pelvis (pinggul) dan tungkai bawah. Tungkai
bawah terdiri dari beberapa bagian yaitu thigh, knee (penghubung thigh dan
commit to user
II - 3
Gambar 2.2 Tulang dan sambungan anggota gerak bawah Sumber: Whittle, 2007
Enam pergerakan dasar terjadi pada berbagai kombinasi di dalam
persendian tubuhanggota gerak bawah. Dua pergerakan pertama yaitu flexion dan
extension yang terjadi pada mata kaki, ankle, pinggul dan jari kaki. Flexion adalah
gerakan membengkok untuk mengurangi sudut relatif persendian antara dua
segmen bersebelahan. Sedangkan extension adalah gerakan meluruskan untuk
menambah sudut relatif persendian antara dua segmen bersebelahan seperti
memposisikan persendian kembali ke titik nol atau titik acuan.
Gambar 2.3 Flexion dan extension
Sumber: Hamill J. dan Knutzen, 2009
Flexion dan extension adalah aksi prinsip dari kaki, dimana aktifitas
tersebut diatur oleh otot-otot dan persendian yang terlibat dalam pergerakan.
commit to user
II - 4
berperan selama gerakan extension disebut sebagai otot ekstensor (Radcliffe dan
Foort, 1961). Saat lutut melakukan gerakan extension, ekstensor akan rileks
sedangkan saat lutut melakukan gerakan flexion, ekstensor akan merentang.
Gerakan flexion-extension lutut dilakukan atas peran sendi lutut, sedangkan
gerakan dorsiflexion-plantarflexion foot dilakukan atas peran sendi pergelangan
kaki.
Abduksi adalah gerakan menjauh dari sumbu tengah badan atau ruas
tubuh. Memidahkan lengan tangan atau kaki ke luar sisi atau merentangkan jari
tangan atau jari kaki adalah suatu contoh abduksi. Sedangkan aduksi adalah
gerakan kembali segmen tubuh ke arah sumbu tengah badan. Gerakan
abduksi-aduksi toes dapat dilakukan atas peran sendi pergelangan kaki dan otot adductor
hallucts.
Gambar 2.4 Abduksi dan aduksi
Sumber: Hamill J. dan Knutzen, 2009
Dua pergerakan dasar yang terakhir melibatkan perputaran (rotasi). Rotasi
dapat berupa medial (internal) atau lateral (eksternal). Rotasi hanya berputar ke
arah kanan dan kiri pada kepala dan batang tubuh. Pada saat posisi dasar awal,
perputaran internal atau medial mengacu pada pergerakan suatu segmen dari suatu
sumbu vertikal sehingga permukaan anterior segmen bergerak ke arah sumbu
tengah tubuh saat permukaan posterior bergerak menjauhi sumbu tubuh.
Perputaran eksternal atau lateral adalah pergerakan kebalikan dimana permukaan
anterior bergerak menjauhi sumbu tengah dan permukaan posterior segmen
bergerak ke arah sumbu tengah.Otot yang berperan dalam pergerakan rotasi kaki
diantaranya, otot tibialis posterior dimana menggerakkan toes ke sisi medial,
sedangkan otot peroneus longus menggerakkan bagian toes ke arah lateral.
Pergerakan ini sangat bergantung pada persendian ankle dan subtalar joint
commit to user
II - 5
Gambar 2.5 Rotasi persendian lutut Sumber: Hamill dan Knutzen, 2009
2.1.3 Fase Gait Cycle
Kompleksitas proses daya gerak terbukti ketika mempertimbangkan enam
faktor utama yang mempengaruhi bentuk gerakan yaitu interaksi sendi lutut, flexi
lutut, flexi hip, rotasi panggul poros vertikal, kemiringan lateral dari panggul dan
pergeseran lateral dari panggul. Melalui daya penggerak, tubuh manusia
melibatkan pengaruh dari total pola pergeseran dari faktor–faktor bentuk gerakan
sejumlah otot utama dari bagian tubuh yang lebih rendah. Terdapat dua fase saat
kaki berjalan yaitu fase berdiri dan fase berayun. Fase berdiri (stance phase)
merupakan bagian siklus dimana tungkai acuan berkontak dengan lantai, terbagi
menjadi fase initial contact, loading response, midstance, dan terminal stance.
Fase berdiri dimulai saat tumit menyentuh lantai (initial contact), kemudian
dilanjutkan dengan kaki yang menapak penuh ke lantai (loading response).
Midstance dimulai saat posisi foot-flat dan berakhir saat terminal stance. Fase
berayun (swing phase) merupakan bagian siklus dimana tungkai acuan tidak
menyentuh lantai. Fase ini dimulai dengan tidak tersentuhnya kaki ke lantai dan
berakhir saat tumit menempel ke lantai (heel contact).
commit to user
II - 6
Gambar 2.7 Diagram waktu gait
Sumber: Whittle, 2007
Tahap-tahap dalam siklus berjalan dijelaskan dengan beberapa bagian.
Mulai dari saat belum bergerak, melangkah, dan saat kedua kaki kembali seperti
posisi semula. Beberapa bagian tersebut dijelaskan, sebagai berikut:
1. Initial Contact/Heel Strike
Initial contact adalah awal dari loading respon, yang merupakan periode
pertama dari stance phase. Initial contact sering disebut “heel strike”, karena
pada individu normal sering kali ada dampak berbeda antara tumit dan tanah,
yang dikenal sebagai “heel strike transient”. Nama lain untuk kejadian ini
adalah “heel contact, “footstrike” atau “foot contact”.
Bagian trunk berada sekitar setengah panjang langkah di belakang kaki
depan. Pada posisi initial contact bagian trunk berputar, bahu kiri dan sisi
kanan pelvis bergerak menjauh ke sisi depan meninggalkan lengan kiri yang
berayun ke belakang. Fleksi maksimum pinggul (umumnya sekitar 30⁰)
tercapai sekitar pertengahan fase ayunan dan berubah sedikit sampai initial
contact. Lutut agak lurus sesaat sebelum terjadi initial contact kemudian fleksi
setelah terjadi initial contact. Jumlah ayunan lengan bervariasi pada setiap
orang dan meningkat seiring bertambahnya kecepatan berjalan. Ketika posisi
initial contact rata-rata siku flexion sebesar 8° dan bahu flexion sebesar 45°.
2. Loading Response (Foot Flat)
Fase loading response adalah periode double support antara fase initial
contact dan fase mid stance. Fase loading response terjadi pada persentase
commit to user
II - 7
trunk berada pada posisi terbawahnya sekitar 20 mm di bawah posisi normal.
Berat badan secara penuh dipindahkan kepada kaki depan, sedangkan kaki
lainnya berada pada fase pre-swing.
Saat fase loading response,bagian arms bergerak secara maksimal ke
posisi depan dan belakang, sedangkan bagian hip memanjang akibat kontraksi
otot ekstensor sejauh 25°.
3. Midstance
Fase midstance adalah akhir dari periode double support dan awal dari
periode single support. Fase midstance terjadi pada periode persentase waktu
gait cycle pada 7%-32% dan mewakili 18% dari gait cycle. Hip mengalami
fleksi sebesar 25%. Bersamaan pada fase ini, terjadi perpindahan berat oleh
kaki pada periode stance (kaki kanan, warna grey), sedangkan kaki lainnya
(kaki kiri, warna biru) berada fase mid-swing.
Pada posisi midstance, energi kinetic berubah menjadi energi potensial.
Trunk naik ke posisi tertinggi sekitar 20 mm di atas level rata-rata dan
Perputaran trunk sudah tidak ada. Gerakan sisi ke sisi trunk mencapai
puncaknya pada posisi midstance dan berubah posisi sekitar 20mm dari posisi
tengah. Seperti kaki, lengan melewati satu sama lain selama midstance karena
mengikuti masing-masing kaki yang berbeda.
4. Terminal Stance (Heel Off)
Fase terminal stance disebut juga heel rise atau heel off karena heel kaki
pada periode stance tidak mengenai landasan. Fase terminal stance pada saat
heel kaki kanan meninggi (mulai meninggalkan landasan) dan dilanjutkan
sampai dengan heel dari kaki kiri mulai mengenai landasan. Fase ini terjadi
pada periode waktu gait cycle 32%-50%, berat badan dipindahkan dan
bertumpu ke bagian bawah kaki depan (toe).
Saat tubuh bergerak ke depan, beban tubuh berpindah dari bagian tumit ke
bagian jari kaki. Saat fase ini, bagian heel meninggi yang diikuti kenaikan knee
flexion 0°-40° dan hip extension 20°-0°. Kenaikan bagian heel menyebabkan
trunk bergerak turun dari posisi tertingginya. Ankle dalam posisi peralihan dari
commit to user
II - 8
jatuh ke depan dengan salah satu kaki berayun untuk mencapai tanah. Dalam
posisi ini berat tubuh mulai berpindah dari belakang menuju left leg.
5. Pre-Swing (Toe-Off)
Fase pre-swing dimulai dengan fase initial contact (heel strike) oleh kaki
kiri dan kaki kanan berada posisi meninggalkan landasan untuk melakukan
periode mengayun (toe-off). Periode waktu pre-swing terjadi pada persentase
waktu gait cycle 50-57%, dan mulai terjadi pelepasan berat tubuh oleh kaki
yang bersangkutan.
Posisi ini menyebakan terjadi rotasi yang ekstrim pada tubuh bagian atas,
dimana bagian trunk, arms, dan trunk berotasi dari titik normalnya. Dalam
posisi ini, bagian hip tetap dalam kondisi flexion sedangkan knee flexion
bergerak menurun dari sudut elevasi sebesar 40° hingga 0°. Ankle berada
dalam puncak plantar flexion dimana membentuk sudut sebesar 25°.
6. Initial Swing (Acceleration)
Fase swing merupakan fase dimana kaki tidak berada di landasan atau
pada posisi berayun. Fase swing terdiri dari tiga fase yaitu initial swing,
mid-swing, dan terminal swing. Fase keenam merupakan fase initial swing, dimana
kaki mulai melakukan ayunan, persentase initial swing adalah 57%-77% dari
periode waktu gait cycle. Fase initial swing dimulai pada saat telapak kaki
kanan mulai diangkat dari posisi landasan (toe off), sedangkan kaki kiri
berada pada posisi midstance.
Saat kaki diangkat, anggota badan naik dengan adanya 15° hip flexion dan
peningkatan knee flexion sampai 60°. Bagian ankle secara parsial berada dalam
posisi 10° plantar flexion. Pada posisi ini, bagian atas tubuh bergerak
menyesuaikan keseimbangan gerakan kaki. Saat kaki dalam posisi
berdampingan, trunk berada dalam posisi tertinggi dan secara maksimal
memindahkan posisi kaki untuk bergerak naik saat posisi kaki yang lain dalam
keadaan berdiri. Bagian arms berada pada posisi yang sama, tangan yang satu
bergerak maju dan yang lainnya bergerak mundur.
7. Mid-Swing
Fase mid-swing yang dimulai pada akhir initial swing dan dilanjutkan
commit to user
II - 9
mengenai landasan. Fase mid-swing terjadi pada periode waktu gait cycle
77%-87%, dimana kaki kiri berada pada fase terminal stance. Pada fase ini juga
terjadi gerak perpanjangan tungkai kaki dalam persiapan melakukan fase heel
strike.
Pada posisi ini bagian trunk kehilangan posisi tertingginya dan bergerak
dari titik maksimalnya untuk menahan kaki kiri kembali ke posisi midline. Hal
ini juga disebakan oleh terjadinya hip flexion lanjutan sebesar 25° dari fase
sebelumnya yang mendukung anggota tubuh ke arah anterior dari titik berat
tubuh. Bagian knee mengikuti respon gravitasi, dimana ankle pada posisi dorsi
flexion untuk menjadi netral (0°). Lengan kanan berada di posisi depan dan
bagian kanan dari pelvis pada posisi di sisi depan kiri.
8. Terminal Swing (Decceleration)
Fase terminal swing merupakan akhir dari gait cycle, terjadi pada periode
waktu gait cycle 87%-100%. Fase terminal swing dimulai pada saat akhir dari
fase mid-swing, dimana tungkai kaki mengalami perpanjangan maksimum dan
berhenti pada saat heel telapak kaki kanan mulai mengenai landasan. Pada
periode ini, posisi kaki kanan berada kembali berada depan anggota badan,
seperti pada posisi awal gait cycle.
Gerakan ke depan anggota badan disempurnakan oleh adanya ekstensi
lutut. Hip bertahan dalam posisi 25° flexion, hip berada dalam posisi netral
begitu pula bagian ankle dorsi flexion menuju posisi netral (0°). Dengan
gerakan demikian anggota tubuh siap untuk kembali dalam posisi berdiri.
2.2 PROSTHETIC PADA AMPUTEE
Diperlukan suatu pemaparan yang lebih mendetail mengenai definisi dan
indikasi prosthetic, fungsi, komponen-komponen, serta bahan prosthetic kaki
bagian atas lutut.
2.2.1 Definisi Prosthetic
Prosthetic adalah alat ganti anggota gerak tubuh yang tidak ada. Anggota
gerak tubuh terdiri dari anggota gerak atas yaitu lengan dan tangan serta anggota
gerak bawah yaitu kaki. Ketiadaan alat gerak dapat disebabkan oleh dua hal, yaitu
commit to user
II - 10
karena masalah tertentu seperti misalnya penyakit, trauma atau kecelakaan dan
tumor. Defisiensi bawaan adalah ketiadaan bagian tubuh sejak lahir.
Ketiadaan kaki dapat dibagi menjadi empat yaitu ketiadaan kaki bagian
atas lutut (above-knee) dan ketiadaan kaki bagian bawah lutut (below-knee),
ketiadaan bagian tengah lutut (middle-knee) dan ketiadaan telapak kaki (syme).
Pembahasan berikutnya hanya menyangkut permasalahan ketiadaan kaki atas lutut
saja, karena tujuan dari penelitian ini yaitu untuk menentukan jenis prosthetic atas
lutut yang memberikan kenyamanan terbaik saat gerakan berjalan (Prosthetics and
Orthotics Post Graduate Medical School, 1990).
2.2.2 Komponen Prosthetic Kaki Atas Lutut (Above-Knee Prosthetic)
Ketiadaan kaki bagian atas lutut (above-knee) menyebabkan amputee
kehilangan sebagian paha, knee, shank, dan bagian foot. Bentuk prosthetic atas
lutut ditunjukkan pada gambar 2.9.
Gambar 2.9 Prosthetic kaki atas lutut Sumber: www.scipolicy.net, 2009
Komponen dasar dari prosthetic atas lutut (above-knee) terdiri dari
komponen paha, foot, ankle, shank, socket, dan sistem suspensi (Prosthetics and
Orthotics Post Graduate Medical School, 1990 dalam Lower Limb Prosthetics).
1. Komponen paha.
Komponen paha adalah komponen prosthetic atas lutut yang sekaligus
berfungsi sebagai socket dari stump. Komponen ini dibuat dari aluminium plat
dengan ketebalan 1,5 mm dan juga menyesuaikan dengan kebutuhan. Pertama kali
yang harus dilakukan adalah penggambaran pola yang disesuaikan dengan ukuran
stump serta paha yang sehat, namun juga masih perlu panambahan pada bagian
commit to user
II - 11
Gambar 2.10 Komponen paha Sumber: Kishner, 2010
2. Foot-Ankle.
Foot (kaki dasar) dan ankle merupakan komponen yang biasanya menjadi
tumpuan pada setiap pergerakan, memberi dukungan selama posisi setengah
berdiri tegak, dan menyesuaikan ayunan untuk membuat tubuh tegak dan bergerak
ke depan pada tahap selanjutnya. Karakteristik yang dimiliki oleh foot-ankle,
yaitu:
a. Mampu menahan bobot (berat) tubuh.
b. Mampu meredam getaran saat kontak tumit (heel contact).
c. Mampu secara cepat mencapai posisi mendatar (foot-flat).
d. Mampu mendukung sendi metatarsophalangeal saat phase berdiri.
e. Menyerupai atau mirip dengan kontur kaki yang sebenarnya.
SACH foot prosthetic masih merupakan salah satu bagian pada kaki
prosthetic. SACH(Solid Ankle Cushion Heel) foot terdiri dari heel kayu, material
yang dimampatkan di sekitar heel, sabuk yang dipasangkan dibawah heel sampai
ke bagian jari kaki, palang atau baut yang menjaga kaki ke tulang kering, dan
cushion heel.
Gambar 2.11 SACH foot
commit to user
II - 12
Cushion heel pada lapisan SACH foot bisa terbuat dari aeoprene atau plastik
fleksibel dan material yang melapisi neoprene. Bentuk SACH foot, material yang
melapisi dan cushion heel dapat busa plastik yang fleksibel. Cushion heel tersedia
dengan tingkat derajat kemampatan, keras atau sedang, lembut yang terpilih atas
dasar tingkatan amputasi, bentuk badan dan kemampuan untuk mengendalikan
prosthetic. SACH foot tidak punya sendi mata kaki, garis simpangan antara tulang
kering dan kaki minimal. SACH foot banyak digunakan pada kaki prosthetic dan
terutama sekali lebih disukai oleh wanita.
a. Single axis foot.
Model single axis foot sendi pergelangan kaki terbuat dari logam, meniru
gerak pergelangan kaki sesungguhnya, meski tidak dapat melakukan gerak
inversi (pembalikan bagian luar ke arah dalam) atau eversi (pembalikan
bagian dalam ke arah luar).
Gambar 2.12 Single axis foot
Sumber: Prosthetics and Orthotics Post Graduate Medical School, 1990
Bumper plantar flexion meredam goncangan akibat gerak tumit. Jari-jari
elastis memungkinkan adanya gerakan mendorong. Gerak pergelangan kaki
memungkinkan perputaran menjadi semakin mudah. Adanya logam pada
pergelangan kaki, kaki menjadi berat dan cepat rusak. Pada single axis foot
dasar kaki dihubungkan kepada blok mata kaki oleh baut.
b. Multi axis foot.
Multi axis foot dapat bergerak dengan mudah secara plantar flexion, dorsi
flexion, pronation atau supination maupun rotasi. Gerak multi axis foot
dikendalikan oleh ring karet atau rubber ring di sekitar sendi bola atau ball
joint. Saat kaki bergerak, ring ditekan. Resistensi kaki untuk bergerak juga
commit to user
II - 13
foot digunakan pada kaki endoskeletal. Kaki ini bergerak seperti asli, tapi
tidak stabil pada posisi berdiri.
Gambar 2.13 Multi axis foot
Sumber: Prosthetics and Orthotics Post Graduate Medical School, 1990
c. Energy recovery foot.
Energy recovery foot dibuat untuk pasien amputasi yang mampu berlari atau
berjalan dengan sangat cepat. Ketika berlari, beban pada kaki bertambah tiga
kali lipat. Tumit kaki yang elastis yang kuat untuk meredam beban pada saat
berlari dan jari elastis yang kuat yang memberi energi dorong yang diperlukan
untuk berlari. Desain SACH sebenarnya dibuat untuk penggunaan dengan
prosthetic eksoskeletal. Sebagian besar prosthetic yang dibuat adalah desain
endoskeletal.
Gambar 2.14 Energy recovery foot
Sumber: Prosthetics and Orthotics Post Graduate Medical School, 1990
SACH foot menonjol pada berat, relatif tahan lama dan murah
dibandingkan desain prosthetic yang lain. Secara komersial tersedia dalam
berbagai bentuk berbeda, tumit. Tidak ada komponen yang bergerak di dalam
SACH foot, diperlukan sedikit pemeliharaan. Kepadatan tumit baji sepatu dapat
divariasi antara lembut, medium dan keras disesuaikan menurut karakteristik gaya
commit to user
II - 14
Tumit baji sepatu dapat menyerap goncangan pemakai yang merupakan
heel-strike dan mengikuti plantar flexion yang terbatas.
3. Shank.
Shank adalah bagian penghubung antara foot, ankle dan socket. Shank
berfungsi untuk memindahkan dan membagi beban dari socket ke bagian foot.
Terdapat dua jenis shank yaitu eksoskeletal dan endoskeletal.Eksoskeletal shank
pada umumnya dibuat dari bahan yang ringan namun kuat dan kokoh. Bahan yang
sering dipakai misalnya plastik, aluminium dan kayu. Pada eksoskeletal shank,
ruang bagian bawah socket dan blok ankle dilubangi untuk mengurangi berat.
Pada endoskeletal shank, terdapat tambahan tumpuan yang berupa tonggak untuk
lebih memperkokoh dan memudahkan pemindahan beban dari socket ke bagian
foot. Tonggak pada endoskeletal shank biasanya terbuat dari metal pylon. Bagian
luar juga dilapisi dengan bahan yang lembut agar penampilan menyerupai kaki
yang sebenarnya.
Keuntungan eksoskeletal shank yaitu selain murah, pembuatannya mudah,
pelapisan bagian luar lebih berdaya tahan. Kekurangan dari shank ini yaitu
kemampuan menopang tubuh lebih kecil dibanding endoskeletal shank.
Keuntungan endoskeletal shank yaitu lebih modern, mampu menopang beban
tubuh, dan lebih kuat. Kekurangan shank ini yaitu mahal, pembuatan sulit dan
rumit. Bentuk kedua jenis shank dapat dilihat pada gambar 2.15 dan 2.16.
Gambar 2.15 Eksoskeletal shank
commit to user
II - 15
Gambar 2.16 Endoskeletal shank
Sumber: www.ottobockus.com, 2010
4. Socket.
Socket adalah bagian dari prosthetic sebagai tempat dimasukkannya
puntung kaki yang masih ada (stump). Socket merupakan alat yang dibentuk dan
disatukan dengan shank. Jadi bagian ini menyambung atau berhubungan langsung
dengan stump, bahkan tidak jarang socket menempel tepat pada bagian stump.
Socket harus mampu menyokong bobot tubuh dan mendukung stump secara kuat
dan nyaman untuk semua aktivitas pengguna. Socket dibuat menempel pas pada
stump secara kuat untuk mengurangi gerakan atau gesekan antara socket dan kulit.
Banyak gesekan menyebabkan antara socket dan kulit pengguna merasa tidak
nyaman selama beraktivitas mengakibatkan resiko yang lebih besar pada abrasi
kulit.
Pembuatan socket didasarkan pada ukuran puntung tiap-tiap pengguna,
agar socket benar-benar menempel pas. Setiap pengguna mempunyai ukuran
socket yang berbeda. Pembuat prosthetic mencatat karakter puntung dari
masing-masing pengguna, mengukur puntung, mengukur batang kaki pasangannya yang
masih utuh untuk kesimetrisan, kemudian membuat cetakan untuk pengepasan
socket.
5. Sistem Suspensi.
Sistem suspensi merupakan bagian yang berfungsi untuk mengaitkan
keseluruhan prosthetic pada bagian dari tubuh. Tujuannya agar prosthetic
commit to user
II - 16
jenisnya, secara ringkas dijabarkan mengenai beberapa jenis dari suspensi
tersebut, yaitu:
a. Cuff Suspension.
Menggunakan manset yang terbuat dari kulit atau anyaman dakron yang kuat
untuk dipasangkan pada bagian dalam socket yang kemudian dipasangkan atau
diikatkan pada bagian paha. Bentuk suspensi ini dapat dilihat pada gambar
2.17.
Gambar 2.17 Cuff suspension
Sumber: Prosthetics and Orthotics Post Graduate Medical School, 1990
b. Waist belt.
Tetap menggunakan manset yang terbuat dari kulit atau anyaman dakron yang
kuat, dimana manset tersebut tidak diikatkan pada paha, melainkan diikatkan
mengelilingi pinggang. Ikat pinggang yang dipasangkan di pinggang terbuat
dari anyaman katun. Dipakai pada individu dengan puntung yang pendek,
gambar 2.18 menunjukkan bentuk waist belt.
Gambar 2.18 Waist belt Sumber: May, 2002
waist belt
commit to user
II - 17
thigh corset
c. Thigh corset.
Sistem penggantung tetap menggunakan waist belt, dimana sistem
penggantungnya dililitkan pada pinggang. Terdapat tambahan yaitu paha
dipasang korset yang berfungsi untuk lebih memperkuat penggantung. Sistem
suspensi ini merupakan ciri dari prosthetic bawah lutut konvensional. Gambar
2.19 memperlihatkan bentuk dari thigh corset.
Gambar 2.19 Thigh corset
Sumber: Prosthetics and Orthotics Post Graduate Medical School, 1990
2.3 TEKNOLOGI SPRING GAS
Gas spring atau juga bisa disebut gas struts adalah salah satu perangkat
energy storing, dimana prinsip kerjanya sama dengan prinsip kerja mechanical
spring. Mechanical spring menyimpan energi dengan memberi tekanan pada
material penyusunnya. Gas spring menyimpan energi dengan cara mengkompresi
gas nitrogen yang terdapat pada gas spring. Semakin ditekan maka ruang udara
dalam gas spring akan semakin berkurang yang menyebabkan tekanan gas
semakin meningkat dan semakin menyimpan banyak energi. Kelebihan gas spring
dibandingkan dengan mechanical spring terdapat pada kecepatan respon, gas
spring cenderung lebih smooth dibandingkan dengan mechanical spring. Dengan
mengganti penggunaan mechanical spring dengan gas spring pada prosthetic atas
lutut endoskeletal sistem energy storing dengan mekanisme 2 bar memungkinkan
commit to user
II - 18
endoskeletal sistem energy storing dengan mekanisme 2 bar untuk aktivitas
keseharian dengan berkurangnya respon untuk melakukan extension yang
membuat amputee lebih nyaman saat berjalan.
.
Gambar 2.20 Energy storing prosthetic knee
Sumber: Laboratorium Perencanaan dan Perancangan Produk Jurusan Teknik Industri Universitas Sebelas Maret, 2010
Konsep energy storing dianalogikan sebagai sebuah pegas yang
menggantikan fungsi otot hamstring dan quadriceps yang berada di sepanjang
thigh (paha) sampai knee (lutut). Ketika meregang dan mengendur tendon ini
menyimpan dan kemudian melepaskan energi potensial elastis. Gerakan pegas
yang terdapat pada knee prosthetic inilah yang akan mengurangi jumlah kerja
yang harus dilakukan otot kaki amputee akibat gaya ayun ketika beraktivitas.
2.4 KESEIMBANGAN GERAK BIOMEKANIKA
Pada pengguna prosthetic, analisis biomekanika digunakan untuk
mengetahui pola berjalan amputee apakah telah sesuai dengan pola berjalan
normalnya (Radcliffe dan Foort, 1961). Hal ini diketahui dengan keseimbangan
gaya dan torsi serta tingkat keluaran energi selama amputee berjalan dalam sutu
periode waktu.
2.4.1 Keseimbangan Gerakan Manusia
Keseimbangan adalah kemampuan untuk mempertahankan kesetimbangan
tubuh ketika di tempatkan di berbagai posisi. Definisi menurut O’Sullivan (2008),
keseimbangan adalah kemampuan untuk mempertahankan pusat gravitasi pada
bidang tumpu terutama ketika saat posisi tegak. Selain itu menurut Ann Thomson
(2008), keseimbangan adalah kemampuan untuk mempertahankan tubuh dalam
commit to user
II - 19
menggunakan aktivitas otot yang minimal. Keseimbangan juga diartikan sebagai
kemampuan relatif untuk mengendalikan pusat massa tubuh (center of mass) atau
pusat gravitasi (center of gravity) terhadap bidang tumpu (base of support).
Keseimbangan melibatkan berbagai gerakan di setiap segmen tubuh dengan di
dukung oleh sistem muskuloskleletal dan bidang tumpu. Kemampuan untuk
menyeimbangkan massa tubuh dengan bidang tumpu akan membuat manusia
mampu untuk beraktivitas secara efektif dan efisien.
Equilibrium merupakan karakteristik keadaan dimana terjadi
keseimbangan gaya dan torsi (momen gaya). Berdasarkan hukum Newton
pertama, tubuh dalam kondisi equilibrium ketika dalam keadaan diam
(motionless) atau bergerak dengan kecepatan konstan. Ketika tubuh dalam
keadaan diam (misal, sewaktu berdiri dengan satu kaki atau berdiri di atas papan
keseimbangan) hal ini disebut sebagai static equilibrium. Tiga kondisi yang harus
dipenuhi tubuh untuk mencapai kondisi static equilibrium (Hall, 1999), sebagai
berikut:
1. Jumlah total gaya vertikal yang terjadi pada tubuh sama dengan nol.
2. Jumlah total gaya horisontal yang terjadi pada tubuh sama dengan nol.
3. Jumlah total torsi harus sama dengan nol.
∑Fx = 0
∑Fy = 0
∑τ = 0...(2.1) dengan; Fx = Gaya Vertikal (N)
Fy = Gaya Horisontal (N) τ = Torsi (Nm)
Dynamic equilibrium merupakan kondisi keseimbangan dimana tubuh
begerak dengan kecepatan konstan. Tubuh dalam kondisi bergerak dianggap
dalam keadaan dynamic equilibrium, apabila semua gaya yang bereaksi sama dan
berlawanan arah dengan gaya inersial. Persamaan kondisi dynamic equilibrium
dinyatakan berikut ini.
∑Fx– max = 0
∑Fy– may = 0
commit to user
II - 20
dengan; Fx, Fy = Gaya vertikal, gaya horizontal (N)
max, may = Perkalian massa tubuh dengan percepatan (kg.ms2) τ = Torsi (Nm)
Iα = Perkalian momen inersia dengan percepatan angular
2.4.2 Torsi
Selain bergerak sesuai arah bekerjanya, benda cenderung untuk memutar
dalam suatu sumbu. Perputaran benda tersebut dikarenakan adanya gaya yang
menyebabkan perpindahan, atau disebut torsi. Torsi yang juga dikenal sebagai
puntiran (momen gaya) merupakan hasil kali antara gaya dan lengan gaya. τ = F x d...(2.3)
Gambar 2.21 Sebuah momen
Sumber: Young dan Freedman, 2002
Pada tubuh manusia, torsi dibangkitkan oleh otot dalam suatu pusat
persendian yang merupakan hasil dari gaya yang bereaksi terhadap jarak antara
garis gaya otot dengan pusat persendian tersebut. Saat joint bergerak pada suatu
jarak, terjadi perubahan momen gaya pada otot yang melintasi persendian.
Perubahan pada momen secara langsung menyebabkan joint torque yang
dibangkitkan oleh otot. Saat berjalan, secara signifikan lebih banyak gaya
dibutuhkan ketika torsi dibangkitkan oleh single support foot dimana momen akan
mengurangi jarak antara tulang metatarsal dengan calcaneus.
Torsi merupakan besaran vektor, sehingga selain mempunyai besar, torsi
juga mempunyai arah. Suatu vektor τ mempunyai arah tegak lurus terhadap
bidang benda. Arah τ adalah tergantung pada arah berputarnya benda akibat gaya
F dan d yang merupakan jarak gaya dari titik acuan (sumbu 0). Apabila arah rotasi
commit to user
II - 21
apabila arah rotasi searah dengan putaran jarum jam, maka arah torsi bernilai
negatif. Dalam menentukan arah torsi menggunakan kaidah alias aturan tangan
kanan.
Torsi τ mengikuti kaidah penjumlahan dan dapat ditinjau sebagai vektor
geser dengan garis kerja yang berhimpit dengan sumbu momen. Satuan dasar dari
momen dalam satuan SI adalah Newton-meter (N.m).
2.4.3 Usaha dan Energi
Keistimewaan dari normal gait adalah bagaimana energi disimpan dalam
jumlah yang optimal saat berjalan. Salah satu bentuk pola berjalan abnormal
adalah hilangnya kestabilan yang menyebabkan pengeluaran energi yang
berlebihan sehingga tubuh mudah lelah. Pengukuran transfer energi selama
berjalan pada persendian dan konsumsi energi secara keseluruhan merupakan
bagian penting dalam analisis cara berjalan ilmiah.
Work (usaha) merupakan kombinasi lain dari analisis kinematika dan
kinetika. Secara ilmiah work (usaha) terjadi ketika gaya bekerja pada suatu objek
sehingga objek bergerak dalam jarak tertentu. Sebuah gaya melakukan usaha
apabila benda yang dikenai gaya mengalami perpindahan. Secara matematis,
usaha yang dilakukan oleh gaya didefinisikan sebagai hasil kali perpindahan
dengan gaya yang searah dengan perpindahan.
W =F x s...(2.4)
Gambar 2.22 Usaha oleh gaya konstan Sumber: Young dan Freedman, 2002
Pada gerak rotasi, kerja didefinisikan sebagai hasil kali antara torsi dengan
perpindahan sudut. Secara matematis dapat ditulis, sebagai berikut:
commit to user
II - 22
Hasil perkalian antara besar gaya (F) dan besar perpindahan (s) di atas merupakan
bentuk perkalian titik atau perkalian skalar, dimana work (usaha) tidak
mempunyai arah. Satuan usaha dalam Sistem Internasional (SI) adalah
newton-meter. Satuan newton-meter juga biasa disebut Joule (1 Joule = 1 N.m).
Saat tubuh bergerak dalam jarak tertentu sebagai hasil dari gaya eksternal
yang mengenai tubuh, tubuh dikatakan dikenai kerja. Besarnya kerja setara
dengan hasil perkalian gaya reaksi dan jarak perpindahan. Ketika gaya bekerja
pada tubuh namun tidak menimbulkan perpindahan gerak akibat adanya gaya
yang berlawanan arah dengan gaya ekternal, misal gaya gesek atau yang
disebabkan berat tubuh, tidak ada kerja mekanik yang berlaku dalam tubuh,
karena tubuh tidak berpindah dari posisi awal.
Ketika otot berkontraksi dan menghasilkan gerak pada segmen tubuh, otot
dikatakan bekerja terhadap segmen tubuh. Kerja mekanik yang terjadi dalam
tubuh dapat dikatagorikan sebagai kerja negatif maupun kerja positif, sesuai gaya
pada otot yang bereaksi pada tubuh. Ketika torsi pada otot dan arah gerak angular
pada joint dalam arah yang sama, kerja yang dilakukan otot dikatakan bernilai
posistif. Namun, bila torsi pada otot dan arah gerak angular pada joint dalam arah
yang berbeda, kerja yang dilakukan otot dikatakan bernilai negatif.
Secara umum, energi didefinisikan sebagai kapasitas untuk melakukan
kerja. Oleh karena itu, energi mekanik merupakan kapasitas untuk melakukan
kerja mekanik. Usaha dilakukan ketika energi dipindahkan dari satu benda ke
benda lain. Jumlah total energi pada sistem dan lingkungan bersifat kekal. Energi
tidak pernah hilang, tetapi hanya dapat berubah bentuk dari satu bentuk energi
menjadi bentuk energi lain. Energi mempunyai satuan yang sama dengan usaha
yaitu joule. Secara garis besar, energi terbagi dalam dua macam, energi potensial
dan energi kinetik.
Energi kinetik (EK) merupakan energi gerak. Tubuh memproses energi
kinetik hanya saat tubuh dalam keadaan bergerak. Jika tubuh tidak bergerak maka
v = 0 sehingga besarnya energi kinetik juga nol. Berikut persamaan matematis
energi kinetik dalam gerak translasi dan gerak rotasi (angular).
2 2 1
mv
commit to user
II - 23 2
2 1
ω
I
KErotasi = ...(2.7)
dengan; KE = Energi kinetik (J)
m = Massa (kg)
v = Kecepatan (m/s)
I = Momen Inersia (kgm2)
ω = Kecepatan sudut (radian)
Bentuk yang lain dari energi adalah energi potensial, dimana merupakan energi
yang menyatakan posisi suatu obyek. Adapun persamaan matematis energi
potensial, sebagai berikut:
PE = mgh...(2.8)
dengan; PE = Energi potensial (J)
m = Massa (kg)
g = Gaya gravitasi (m/s2)
h = Tinggi pusat massa (m)
Pada aplikasi biomekanik perubahan energi potensial disebabkan adanya
perubahan tinggi dari pusat massa, karena biasanya massa tubuh manusia
cenderung tetap. Energi potensial disebut sebagai energi penyimpanan. Hal ini
merupakan bentuk implikasi dari adanya energi kinetik dalam tubuh ketika
bergerak. Salah satu bentuk potensial energi adalah strain energy (SE) atau energi
elastis.
2 2 1
kx
SE= ...(2.9)
dengan k merupakan konstanta elastis yang menunjukkan keelastisan bahan atau
kemampuan untuk menyimpan energi dan berdeformasi. Sedangkan x
menunjukkan besarnya deformasi yang terjadi otot.
Ketika bergerak tubuh memerlukan energi untuk melakukan perpindahan.
Energi mengalir dari satu segmen tubuh menuju segmen tubuhnya dan berubah
bentuk ketika menyimpan dan digunakan untuk menghasilkan gerak. Total
commit to user
II - 24
Etotal = PE + KEtranslasi + KErotasi
2 2
2 1 2
1 ω
I mv
mgh+ +
= ...(2.10)
2.4.4 Sintesis Pergerakan Manusia
Model matematika digunakan dalam menemukan solusi optimal gerakan
manusia yang dianalogikan dalam suatu sistem benda jamak yang tersusun dari
stick diagrams pada setiap joint yang saling terhubung membentuk satu kesatuan.
Perilaku dinamik dari sebuah sistem dinyatakan dalam besaran kinematik dan
kinetika. Pada penelitian ini perilaku dinamik dirumuskan melalui persamaan
gerak Lagrange. Lagrange (L) dari suatu sistem dikatakan sebagai perbedaan
antara jumlah energi kinetik yang terjadi dalam sistem dan jumlah energi potensial
dalam sistem (Winter, 1990).
L = KE - PE...(2.11)
Bentuk umum teori lagrange tentang gerak menyajikan semua bentuk gaya dan
torsi yang muncul dalam sistem. Persamaan umum gerak Lagrange terdapat
dalam (2.12).
i i i
Q q
L q
L dt
d =
∂ ∂ − ∂
∂ ⋅
& ...(2.12)
dengan t menunjukkan waktu, q menunjukkan generalized coordinat dan Q
menunjukkan generalized force. Untuk setiap model persamaan, energi kinetik
dan energi potensial dikalkulasikan dengan menggunakan masing-masing
koordinat dan turunan dari berbagai rigid body yang diasumsikan sebagai pusat
massa.
2.5 PENELITIAN SEBELUMNYA
Primawati dan Wibowo (2010) melakukan penelitian mengenai kajian
biomekanika dan fisiologi pada pengguna prosthetic bawah lutut dengan
memperhatikan fungsi ankle joint. Kedua penelitian ini bertujuan untuk
mengetahui desain prosthetic bawah lutut endoskeletal terbaik dengan
menggunakan hasil pengukuran dari dua perspektif yang berbeda yakni
biomekanik dan fisiologis. Desain prosthetic bawah lutut yang dibahas pada
commit to user
II - 25
impor dan endoskeletal model pengembangan, dimana fokus perbedaan ketiga
prosthetic tersebut terletak pada bagian ankle joint. Penelitian Primawati
menitikberatkan pada aspek fisiologis. Penelitian dilakukan dengan cara
mengukur % tingkat kelelahan, energi ekspenditur, kebutuhan kalori, dan VO2
max. Amputee berjalan normal sejauh 12 meter dan berjalan pada treadmill sejauh
100 meter menggunakan 3 desain prosthetic bergantian dengan tiga kecepatan
berbeda (1,2 km/jam; 1,6 km/jam; dan 2 km/jam). Sedangkan penelitian Wibowo
menitikberatkan pada kajian biomekanik dalam menganalisis jenis prosthetic yang
mampu memeberikan keseimbangan terbaik saat berjalan. Perhitungan gaya dan
momen dilakukan berdasarkan data yang telah dikumpulkan pada masing-masing
fase gerakan pada waktu pengguna prosthetic bawah lutut menggunakan
masing-masing model prosthetic secara bergantian. Perhitungan meliputi gaya dan
momen yang bekerja pada persendian hip, knee, dan ankle baik kaki normal
maupun kaki prosthetic. Berdasarkan kedua penelitian ini diperoleh hasil bahwa
desain prosthetic endoskeletal model pengembangan memiliki keseimbangan gaya
dan momen serta tingkat keluaran energi fisiologis yang lebih baik dari prosthetic
eksoskeletal maupun prosthetic endoskeletal import.
Farahmand, Rezaeian, Narimani, dan Dinan (2006) melakukan kajian
mengenai analisis kinematis dan dinamis terhadap gaya berjalan amputee atas
lutut. Tujuan dari penelitian ini adalah untuk mengukur dan menganalisis variabel
spatio-temporal dan kinematika. Karakteristik gait dari lima transfemoral
amputee dan lima subjek normal diukur dengan menggunakan videografi dan
force platform. Tubuh subjek dimodelkan pada bidang sagital 2D dibagi menjadi
8 segmen dan dianalisis dengan pendekatan kinematik dan dinamik. Momen hip
kaki amputee yang utuh lebih besar dari momen kaki normal (2,08 Nm/kg
dibanding 1,68 Nm/kg) dan momen lututnya juga (1,84 Nm/kg dibanding 1,14
Nm/kg). Sedangkan momen hip kaki teramputasi lebih rendah dari kaki normal
(0,97 Nm/kg dibanding 1,67Nm/kg).Hasilnya, terdapat perbedaan yang signifikan
antara subjek amputee dan subjek normal, tetapi perbedaan antara kaki yang utuh
dan kaki yang teramputasi tidak terlalu signifikan. Kinematik kaki utuh amputee
dan kaki orang normal hampir sama tetapi kaki yang teramputasi mempunyai
commit to user
II - 26
Farber dan Jacobson (1995) melakukan kajian mengenai prosthetic atas
lutut dengan sistem energy recovery.Penelitian ini dilakukan pada 32 pasien yang
berumur 17-82 tahun. Sebelumnya, pasien mayoritas menggunakan prosthetic
dengan uniaxial knee, tiga pasien menggunakan 4-bar linkage, dan enam pasien
dipakaikan prosthetic baru dengan mekanisme 4-bar linkage. Hasil penelitian ini
didapatkan koefisien energy recovery meningkat 30% dibandingkan dengan above
knee prosthetic konvensional. Konsumsi energi menurun 35% selama berjalan
dengan prosthetic baru.
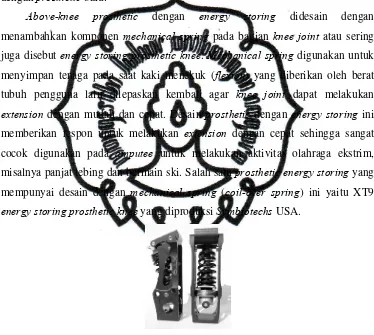
Above-knee prosthetic dengan energy storing didesain dengan
menambahkan komponen mechanical spring pada bagian knee joint atau sering
juga disebut energy storing prosthetic knee. Mechanical spring digunakan untuk
menyimpan tenaga pada saat kaki menekuk (flexion) yang diberikan oleh berat
tubuh pengguna lalu dilepaskan kembali agar knee joint dapat melakukan
extension dengan mudah dan cepat. Desain prosthetic dengan energy storing ini
memberikan respon untuk melakukan extension dengan cepat sehingga sangat
cocok digunakan pada amputee untuk melakukan aktivitas olahraga ekstrim,
misalnya panjat tebing dan bermain ski. Salah satu prosthetic energy storing yang
mempunyai desain dengan mechanical spring (coil-over spring) ini yaitu XT9
[image:33.612.132.506.226.561.2]energy storing prosthetic knee yang diproduksi Symbiotechs USA.
Gambar 2.23 XT9 Energy storing prosthetic knee
commit to user
III - 1
BAB III
METODOLOGI PENELITIAN
Metodologi dalam penelitian kajian dynamic gait bagi pengguna prosthetic
atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar dijelaskan
pada gambar 3.1.
Latar belakang
Perumusan masalah
Penetapan tujuan dan manfaat penelitian
Studi literatur
Pemodelan energy storing
menggunakan persamaan Lagrange
Pengambilan data parameter yang diperlukan untuk perhitungan menggunakan model pada 8 fase berjalan
Posisi sudut dengan electrogoniometer Rf
Kecepatan dan percepatan dengan CVMob Dimensi dan
massa prosthetic
Parameter lain dari penurunan model
Perhitungan external work dan komponen-komponennya (torsi dan gaya
eksternal) pada kaki normal dan kaki prosthetic menggunakan prosthetic
endoskeletal sistem energy storing dengan mekanisme 2 bar
Kesimpulan dan saran
Analisis dan interpretasi hasil komparasi keseimbangan tiap fase dan fase-fase
yang berlawanan pada kaki normal dan kaki prosthetic menggunakan prosthetic
endoskeletal sistem energy storing dengan mekanisme 2 bar
Anthropometri amputee
commit to user
III - 2
Pada gambar 3.1 telah dijelaskan langkah yang digunakan dalam penelitian.
Uraian penjelasan metodologi dijelaskan tahap demi tahap dalam sub bab di
bawah ini.
3.1 IDENTIFIKASI MASALAH DALAM PENELITIAN
Tahapan untuk mengidentifikasi permasalahan pada penelitian ini dijelaskan,
sebagai berikut:
1. Latar belakang.
Pada tahun 2010, Laboratorium Perencanan dan Perancangan Produk Jurusan
Teknik Industri Universitas Sebelas Maret Surakarta mengembangkan
prosthetic atas lutut endoskeletal sistem energy storing dengan mekanisme 2
bar. Energy storing prosthetic merupakan salah satu teknologi yang
menunjang fleksibilitas gerak amputee pengguna prosthetic endoskeletal.
Konsep energy storing dianalogikan sebagai sebuah pegas yang menyimpan
dan kemudian melepaskan energi. Gerakan pegas pada knee prosthetic
mengurangi jumlah kerja yang harus dilakukan otot kaki amputee akibat gaya
ayun ketika beraktifitas.
Pengguna prosthetic pada umumnya tidak dapat berjalan normal, sehingga
kajian dynamic gait sangat berperan dalam mengkaji apakah pola berjalan
pasien telah menyerupai pola berjalan normalnya. Melalui kajian dynamic
gait, akan diketahui sejauh mana prosthetic atas lutut endoskeletal dengan
konsep energy storing dapat mengakomodasi gerakan amputee saat berjalan
di bidang datar sehingga amputee dapat berjalan lebih mudah dan energi yang
dikeluarkan lebih kecil.
2. Perumusan masalah.
Permasalahan yang dirumuskan adalah bagaimana kemampuan prosthetic atas
lutut endoskeletal sistem energy storing dengan mekanisme 2 bar pada
aktivitas berjalan di bidang datar dengan kajian dynamic gait.
3. Tujuan dan manfaat penelitian.
Penelitian ini bertujuan mengetahui kemampuan prosthetic atas lutut
endoskeletal sistem energy storing knee dengan mekanisme 2 bar pada
commit to user
III - 3
3.2 PENGUMPULAN
DAN PENGOLAHAN DATA
Pengumpulan data dilakukan sebagai penunjang dan bahan analisis
terhadap permasalahan yang diangkat. Dalam hal ini pengumpulan data diperoleh
melalui dokumentasi penelitian terkait dengan kajian prosthetic atas lutut
endoskeletal. Penelitian dilakukan di Laboratorium Perancangan Sistem Kerja dan
Ergonomi Teknik Industri UNS. Adapun data yang diambil dari responden ada
dua yaitu data awal dan data utama penelitian. Data awal meliputi usia, tinggi,
berat badan dan pengukuran anthropometri responden. Data utama yaitu data
pengukuran sudut (q) pada ankle, knee, dan hip joint saat fase berjalan dalam satu
siklus gerakan.
3.2.1 Pemodelan Energy Storing menggunakan Persamaan gerak Lagrange.
Formulasi yang dibuat terdiri atas dua formulasi, yaitu formulasi external
work dan komponen-komponenya responden kaki normal dan kaki prosthetic
pada saat berjalan. Perbedaan signifikan kedua formulasi tersebut adalah adanya
penambahan energi potensial pegaspada prosthetic amputee.
Langkah-langkah pemodelan energy storing menggunakan persamaan
Lagrange, sebagai berikut:
1. Menentukan vektor perpindahan (displacement vector).
Menentukan displacement vector pada delapan titik kaki yaitu foot, center of
mass foot, ankle, center of mass shank, knee, center of mass thigh, hip, dan
center of mass upper body terhadap dimensi panjang bagian kaki dan sudut
yang terbentuk saat berjalan. Penentuan posisi displacement berdasar sumbu x
dan sumbu y, dan besar sudut yang terjadi merupakan turunan dari waktu.
2. Menghitung vektor kecepatan (velocity vector).
Perhitungan velocity vector hanya dilakukan pada empat titik yaitu center of
mass foot, center of mass shank, center of mass thigh, dan center of mass
upper body yang mempunyai kecepatan terhadap joint tubuh (ankle, knee, dan
hip). Untuk menghitung velocity vector dengan cara menurunkan displacement
vector dari titik yang dimaksudkan.
3. Merumuskan Lagrangian.
Energi yang dikeluarkan saat berjalan berupa kinetic energy dan potential
commit to user
III - 4
melakukan pengurangan potential energy terhadap kinetic energy. Bentuk
umum persamaan gerak Lagrange yang terdapat dalam persamaan (2.11)
digunakan untuk mengetahui keseimbangan nilai energi dan torsi secara
dinamis pada setiap fase dalam satu periode waktu berjalan. Besarnya usaha
keseluruhan dihitung dengan menggunakan rumusan usaha baik pada gerak
translasi maupun rotasi dengan menggunakan persamaan (2.4) dan juga
persamaan (2.5). Perbedaan Lagrangian pada kaki normal dan kaki prosthetic
adalah adanya penambahan energi pegas pada perhitungannya.
4. Merumuskan external work.
Perumusan external work dengan menghitung seluruh hasil perkalian antara
torsi dan sudut yang terbentuk pada ankle, knee, dan hip joint. Besarnya work
keseluruhan dihitung menggunakan rumusan usaha baik pada gerak translasi
maupun rotasi dengan menggunakan persamaan (2.4) dan persamaan (2.5).
5. Menurunkan komponen external work (torsi dan gaya).
Komponen external work didapatkan dari hasil penurunan Lagrangian dan
external work. Hasil penurunan tersebut berupa besar torsi dan gaya yang
terjadi pada ankle, knee, dan hip joint. Perhitungan torsi dilakukan pada
persendian hip, knee, dan ankle baik kaki normal maupun kaki prosthetic.
3.2.2 Pengambilan Data Parameter
Data yang diperlukan persamaan gerak Lagrange untuk pengukuran tingkat
keseimbangan berjalan (equilibrium gait) pada pengguna prosthetic atas lutut
menggunakan prostheticendoskeletal sistem energy storing dengan mekanisme 2
bar, yaitu:
1. Sudut gerakan (q) pada segmen tubuh di setiap fase gerakan.
Pengukuran sudut bertujuan untuk mengetahui sudut yang terbentuk pada
ankle, knee, dan hip joint baik kaki normal maupun kaki prosthetic saat
berjalan menggunakan prosthetic kaki atas lutut endoskeletal sistem energy
storing dengan mekanisme 2 bar. Sudut yang terbentuk dari masing-masing
segmen dicari dengan menggunakan alat electrogoniometer Rf. Secara umum,
prosedur pelaksanaan dari pengukuran sudut, yaitu:
a. Pengguna prosthetic memakai prosthetic kaki atas lutut endoskeletal
commit to user
III - 5
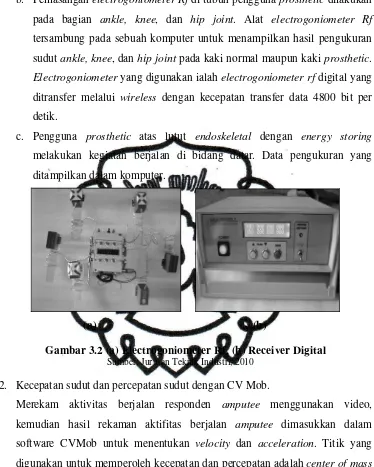
b. Pemasangan electrogoniometer Rf di tubuh pengguna prosthetic dilakukan
pada bagian ankle, knee, dan hip joint. Alat electrogoniometer Rf
tersambung pada sebuah komputer untuk menampilkan hasil pengukuran
sudut ankle, knee, dan hip joint pada kaki normal maupun kaki prosthetic.
Electrogoniometer yang digunakan ialah electrogoniometer rf digital yang
ditransfer melalui wireless dengan kecepatan transfer data 4800 bit per
detik.
c. Pengguna prosthetic atas lutut endoskeletal dengan energy storing
melakukan kegiatan berjalan di bidang datar. Data pengukuran yang
ditampilkan dalam komputer.
(a) (b)
Gambar 3.2 (a) Electrogoniometer Rf, (b) Receiver Digital Sumber: Jurusan Teknik Industri, 2010
2. Kecepatan sudut dan percepatan sudut dengan CV Mob.
Merekam aktivitas berjalan responden amputee menggunakan video,
kemudian hasil rekaman aktifitas berjalan amputee dimasukkan dalam
software CVMob untuk menentukan velocity dan acceleration. Titik yang
digunakan untuk memperoleh kecepatan dan percepatan adalah center of mass
foot, ankle, center of mass shank, center of mass thigh, dan center of mass
upper body.
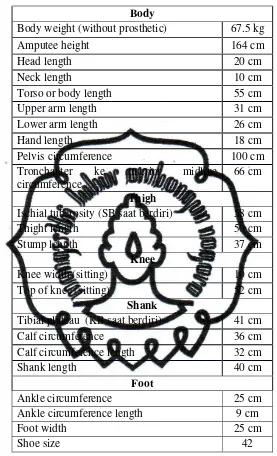
3. Pengukuran anthropometri pengguna prosthetic kaki atas lutut.
Pengambilan data anthropometri amputee pengguna prosthetic digunakan
untuk menghitung panjang segmen titik berat tubuh pengguna prosthetic.
Pertama diukur tinggi badan dan berat badan pengguna prosthetic, kemudian
dilakukan pengambilan data anthropometri amputee. Data anthropometri
[image:38.612.134.508.87.554.2]commit to user
III - 6
pengukuran panjang segmen kaki yang meliputi panjang stump, panjang betis
dan panjang telapak kaki. Panjang segmen telapak kaki diukur dari ujung jari
terpanjang pada kaki hingga bagian belakang dari kaki. Panjang segmen betis
diukur dari mata kaki hingga lutut. Pengukuran anthropometri tubuh amputee
menggunakan meteran dan berat badan menggunakan timbangan badan.
[image:39.612.135.509.173.507.2](a) (b)
Gambar 3.3 Alat ukur, (a) Meteran, (b) Timbangan badan Sumber : Jurusan Teknik Industri, 2010
Meteran yang digunakan adalah meteran kain dengan panjang maksimal
sebesar 2 m. Timbangan badan yang digunakan ialah timbangan digital
dengan beban maksimal 150 kg dan ketepatan pembacaan data sebesar 0.01
kg.
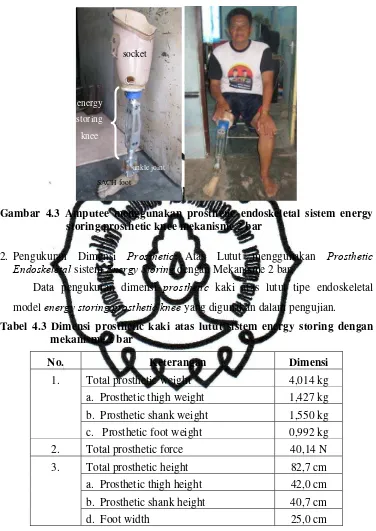
4. Pengukuran dimensi prosthetic endoskeletal sistem energy storing dengan
mekanisme 2 bar.
Unit penelitian adalah prosthetic atas lutut endoskeletal yang khusus
digunakan responden amputee. Pengukuran dilakukan untuk mengetahui
karakteristik prosthetic atas lutut endoskeletal dengan energy storing yang
ditinjau dari ukuran berat dan panjang prosthetic. Semua dimensi pada
ran