commit to user
i
KAJIAN DYNAMIC CYCLE GAIT
PADA PENGGUNA PROSTHETIC ATAS LUTUT
ENDOSKELETAL DENGAN SISTEM ENERGI STORING
MEKANISME 2 BAR PADA AKTIVITAS BERJALAN CEPAT
Skripsi
Sebagai Persyaratan Untuk Memperoleh Gelar Sarjana Teknik
ZULFA MIFTAKHUL FAIZ
I0306064
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK
UNIVERSITAS SEBELAS MARET
commit to user
ii
LEMBAR PENGESAHAN
Judul Tugas Akhir :
KAJIAN DYNAMIC CYCLE GAIT
PADA PENGGUNA PROSTHETIC ATAS LUTUT
ENDOSKELETAL DENGAN SISTEM ENERGI STORING
MEKANISME 2 BAR PADA AKTIVITAS BERJALAN CEPAT
Ditulis oleh:
Zulfa Miftakhul Faiz I 0306064
Mengetahui,
Dosen Pembimbing 1
Retno Wulan Damayanti, ST, MT
NIP. 19800306 200501 2 002
Pembantu Dekan I Fakultas Teknik
Ir. Noegroho Djarwanti, MT
NIP. 19561112 195403 2 007
Dosen Pembimbing II
Ir. Lobes Herdiman, MT
NIP. 19641007 199702 1 001
Ketua Jurusan Teknik Industri
Ir. Lobes Herdiman, MT
commit to user
iii
LEMBAR VALIDASI
Judul Tugas Akhir :
KAJIAN DYNAMIC CYCLE GAIT
PADA PENGGUNA PROSTHETIC ATAS LUTUT
ENDOSKELETAL DENGAN SISTEM ENERGI STORING
MEKANISME 2 BAR PADA AKTIVITAS BERJALAN CEPAT
Ditulis oleh:
Zulfa Miftakhul Faiz I 0306064
Telah disidangkan pada hari Jumat tanggal 06 Desember 2010
Di Jurusan Teknik Industri Fakultas Teknik Universitas Sebelas Maret Surakarta, dengan
Dosen Penguji
1. Ilham Priadythama, ST, MT NIP. 19801124 200812 1 002
1. Taufiq Rohman, STP, MT NIP. 19701030 199802 1 001
Dosen Pembimbing
1. Retno Wulan Damayanti, ST, MT NIP. 19800306 200501 2 002
commit to user
iv
SURAT PERNYATAAN
ORISINALITAS KARYA ILMIAH
Saya mahasiswa Jurusan Teknik Industri UNS yang bertanda tangan di bawah ini, Nama : Zulfa Miftakhul Faiz
Nim : I 0306064
Judul tugas akhir : Kajian Dynamic Gait pada Pengguna Prosthetic Atas Lutut Endoskeletal dengan Sistem Energy Storing Mekanisme 2 Bar pada Aktivitas Berjalan Cepat.
Menyatakan bahwa Tugas Akhir (TA) atau Skripsi yang saya susun tidak mencontoh atau melakukan plagiat dari karya tulis orang lain. Jika terbukti bahwa Tugas Akhir yang saya susun mencontoh atau melakukan plagiat dapat dinyatakan batal atau gelar Sarjana yang saya peroleh dengan sendirinya dibatalkan atau dicabut.
Demikian surat pernyataan ini saya buat dengan sebenar-benarnya dan apabila dikemudian hari terbukti melakukan kebohongan maka saya sanggup menanggung segala konsekuensinya.
Surakarta, 06 Desember 2010
commit to user
v
SURAT PERNYATAAN
PUBLIKASI KARYA ILMIAH
Saya mahasiswa Jurusan Teknik Industri UNS yang bertanda tangan di bawah ini, Nama : Zulfa Miftakhul Faiz
Nim : I 0306064
Judul tugas akhir : Kajian Dynamic Gait pada Pengguna Prosthetic Atas Lutut Endoskeletal dengan Sistem Energy Storing Mekanisme 2 Bar pada Aktivitas Berjalan Cepat.
Menyatakan bahwa Tugas Akhir (TA) atau Skripsi yang saya susun sebagai syarat lulus Sarjana S1 disusun secara bersama-sama dengan Pembimbing 1 dan Pembimbing 2. Bersamaan dengan syarat pernyataan ini bahwa hasil penelitian dari Tugas Akhir (TA) atau Skripsi yang saya susun bersedia digunakan untuk publikasi dari proceeding, jurnal, atau media penerbit lainnya baik di tingkat nasional maupun internasional sebagaimana mestinya yang merupakan bagian dari publikasi karya ilmiah.
Demikian surat pernyataan ini saya buat dengan sebenar-benarnya.
Surakarta, 06 Desember 2010
commit to user
vi
KATA PENGANTAR
Puji syukur penulis panjatkan pada Tuhan Yang Maha Esa atas karunia-Nya sehingga penulis berhasil menyelesaikan Laporan Tugas Akhir dengan judul “Kajian Dynamic Gait bagi Pengguna Prosthetic Atas Lutut Endoskeletal Sistem Energy Storing dengan Mekanisme 2 Bar saat Aktivitas Berjalan Cepat” ini dengan baik.
Dengan segenap ketulusan hati penulis menyampaikan ucapan terima kasih atas segala bantuan dari berbagai pihak sehingga dapat menyelasaikan Laporan Tugas Akhir ini. Penulis menyampaikan terima kasih kepada:
1. Bapak dan ibuku yang selalu memberi dukungan dan doa yang tak pernah putus sehingga penulis berhasil menyelesaikan Laporan Tugas Akhir ini. Tuhan selalu memberkati kalian.
2. Bapak Ir. Lobes Herdiman, MT selaku Ketua Jurusan Teknik Industri dan selaku Dosen Pembimbing II atas segala bimbingan, bantuan dan juga kesabaran yang telah diberikan kepada penulis selama penyelesaian Laporan Tugas Akhir dan selama penulis menjadi mahasiswa di Teknik Industri UNS. 3. Ibu Retno Wulan Damayanti, ST, MT selaku Dosen Pembimbing I dan Pembimbing Akademik, terima kasih atas segala bantuan dan bimbingan ibu selama penyelesaian Laporan Tugas Akhir ini.
4. Bapak Ilham Priadythama, ST, MT dan Bapak Taufik Rohman STP, MT
7. Teman-teman seperjuangan pembuatan Tugas Akhir –Tim Kesebelasan (Ardian, Ariesta, Nugroho, Ferli, Isti, Dinar, Ginung, Kiki, Esha dan Samto) –. Thanks atas segala support kalian kepadaku. Semangat dan Sukses selalu. 8. Teman-teman angkatan 2006 jurusan Teknik Industri UNS atas kerjasama dan
commit to user
vii
Angga, Anita, Ardian, Arista, Asma, Asti, Astrid, Aya, Ayu, Bayu, Bellinda, Budi, Dinar, Esha, Finishia, Ferli, Ginung, Gusti, Helmi, Hendri, Heni, Indah, Indra, Isti, Joanna, Maria, Maryani, Nando, Natalia, Novarini, Nugroho, Nurjanah, Prita, Rena, Rezki, Rinta, Rufaida, Ruth, Samto, Sarah, Sigit, Sukma, Tiwi, Yona,-, bahagia dan beruntung memiliki sahabat seperti kalian semua, semoga kesuksesan selalu menyertai kita semua. Amin.
9. Semua pihak yang belum tertulis di atas, terima kasih atas segala bantuan dan dukungannya.
Sebagai akhir dari kata pengantar ini, penulis menyampaikan bahwa laporan ini masih jauh dari sempurna dikarenakan keterbatasan kemampuan yang penulis miliki. Saran dan kritik diharapkan untuk perbaikan. Semoga laporan ini bermanfaat dan dapat memberikan inspirasi bagi semua.
Surakarta, 06 Desember 2010
commit to user
viii
ABSTRAK
Zulfa Miftakhul Faiz, NIM: I 0306064. KAJIAN DYNAMIC CYCLE GAIT PADA PENGGUNA PROSTHETIC ATAS LUTUT ENDOSKELETAL
DENGAN SISTEM ENERGI STORING MEKANISME 2 BAR PADA
AKTIVITAS BERJALAN CEPAT. Skripsi. Surakarta: Jurusan Teknik Industri Fakultas Teknik, Universitas Sebelas Maret, Desember 2010.
Prosthetic telah berkembang sampai pada pemanfaatan sistem energy storing dalam mengurangi konsumsi energi tidak hanya pada aktivitas berjalan normal namun juga pada berjalan cepat. Berjalan cepat merupakan salah satu parameter yang penting untuk mengukur performansi prosthetic. Prosthetic atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar telah dilengkapi dengan sistem energy storing menggunakan gas spring pada knee joint. Tujuan dari penelitian ini adalah mengetahui kemampuan prosthetic atas lutut
endoskeletal sistem energy storing dengan mekanisme 2 bar pada aktivitas berjalan cepat.
Penelitian ini meliputi pengamatan dan pemodelan dynamic cycle gait
gerakan berjalan cepat amputee pengguna prosthetic endoskeletal sistem energy storing dengan mekanisme 2 bar. Pemodelan dynamic cycle gait menggunakan persamaan gerak Lagrange untuk menghitung external work dan komponennya (torsi dan gaya). Parameter perhitungan diperoleh dari video gerakan berjalan
amputee pada bidang datar saat aktivitas berjalan cepat.
Hasil dari penelian ini adalah model delapan fase berjalan amputee dengan nilai parameter dinamis. Berdasarkan pengolahan data dapat disimpulkan bahwa
prosthetic atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar dapat mengakomodasi semua fase gerakan berjalan kecuali fase ke tujuh yaitu fase mid swing karena respon pegas pada prosthetic ini belum bisa dikendalikan dengan baik.
Kata kunci: berjalan cepat, prosthetic atas lutut endoskeletal sistem energy storing dengan mekanisme 2 bar, kajian dynamic cycle gait.
commit to user
ix
ABSTRACT
Zulfa Miftakhul Faiz, NIM: I0306064. DYNAMIC CYCLE GAIT ANALYSIS OF AN AMPUTEE WITH A TWO BAR MECHANISM ENDOSKELETAL ABOVE KNEE PROSTHETIC WITH ENERGY STORING SYSTEM ON FAST WALKING ACTIVITY. Final Assignment. Surakarta: Industrial Engineering Department, Faculty of Engineering, Sebelas Maret University, December 2010.
Prosthetic has been developed through the utilization of energy storing system in reducing energy consumption not only in normal walking but also in fast walking. Fast walking is one of parameter to measure the performance of prosthetic. A two bar mechanism endoskeletal above knee prosthetic with energy storing system is already equipped with energy storing system which used a gas spring installed in its knee joint. This research objectives is to observe and calculate the ability of this prosthetic.
This study has include both laboratory observation and mathematically model of dynamic cycle gait. Modelling dynamic cycle gait using the lagrangian equation of motion to determine the external work and its components, the torque and the exerted force. The parameter was gained from the capture of amputee walking cycle on fast walking activity
The result of this research is eight phase mathematical model of dynamic gait with their value of dynamic parameter. Based on data processing can be conclude that the new developed prosthetic design can accommodate all the phases except the seventh phase (mid swing phase) which was caused by inappropriate spring response.
Key word: fast walking, a two bar mechanism endoskeletal above knee prosthetic with energy storing system, dynamic cycle gait, external work and its components (the torque and the exerted force).
commit to user
SURAT PERNYATAAN ORISINALITAS KARYA ILMIAH ... iv
SURAT PERNYATAAN PUBLIKASI KARYA ILMIAH ... v
KATA PENGANTAR ... vi 1.7 Sistematika Penulisan ... I-4
BAB II TINJAUAN PUSTAKA ... II-1
commit to user
xi
2.4 Analisis Gerak Biomekanika ... II-16 2.5 Anthropometri Data Biomekanika ... II-16 2.6 Keseimbangan Gerak Biomekanika ... II-19 2.6.1 Keseimbangan Gerakan Manusia ... II-19 2.6.2 Torsi ... II-20 2.6.3 Work ... II-21 2.6.4 Energi ... II-21 2.6.5 Persamaan Gerak Dinamis Lagrange ... II-23 2.7 Human Amputee Gait ... II-24 2.8 Above Knee Prosthetic ... II-25 2.8.1 Komponen Prosthetic Atas Lutut ... II-26 2.9 Energy Storing Knee Prosthetic ... II-30 2.10Penelitian Sebelumnya ... II-33
BAB III METODE PENELITIAN ... III-1
3.1 Identifikasi Masalah ... III-2 3.2 Pengumpulan Data ... III-4 3.3 Pengolahan Data ... III-7 3.4 Analisis dan Interpretasi Hasil ... III-9 3.5 Kesimpulan dan Saran ... III-9
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA ... IV-1
4.1 Pengumpulan Data ... IV-1 4.1.1 Data Responden Pengguna Prosthetic Atas Lutut ... IV-1 4.1.2 Model Prosthetic Atas Lutut dengan Energy Storing
Knee Prosthetic ... IV-2 4.1.3 Siklus Berjalan Cepat Amputee pada Permukaan
Datar ... IV-6 4.2 Pemodelan Siklus Berjalan Cepat Amputee ... IV-8 4.3 Pengolahan Data ... IV-20
4.3.1 Menentukan Besarnya Massa tiap Segmen Tubuh, Titik Berat Segmen Kaki, Dan Momen Inersia
commit to user
xii
4.3.2 Perhitungan External Work, Komponen External
Work, dan Energi dalam 1 Siklus Berjalan ... IV-25
BAB V ANALISIS DAN INTERPRETASI HASIL ... V-1
5.1 Analisis Komparasi Kaki Prosthetic dan Kaki Normal pada
Gerakan Berjalan Amputee ... V-1 5.1.1 Komparasi Fase 1 Initial Contact dengan Fase 4
Terminal Stance ... V-1 5.1.2 Komparasi Fase 2 Loading Respons dengan Fase 5
Pre-Swing ... V-8 5.1.3 Komparasi Fase 3 stance dengan Fase 7
Mid-swing... V-13 5.2 Interpretasi Hasil ... V-20
BAB VI KESIMPULAN DAN SARAN ... VI-1
1.1 Kesimpulan ... VI-1 1.2 Saran ... VI-1
DAFTAR PUSTAKA
commit to user
xiii
DAFTAR TABEL
Tabel 2.1 Pemodelan distribusi berat badan ... II-18 Tabel 4.1 Anthropometri pengguna prosthetic kaki atas lutut ... IV-2 Tabel 4.2 Komponen-komponen energy storing knee prosthetic ... IV-4 Tabel 4.3 Dimensi prosthetic per komponen kaki atas lutut ESPK ... IV-6 Tabel 4.4 Dimensi prosthetic per segmen kaki atas lutut ESPK ... IV-6 Tabel 4.5 Massa segmen tubuh ... IV-21 Tabel 4.6 Massa prosthetic ... IV-22 Tabel 4.7 Panjang titik berat segmen tubuh ... IV-24 Tabel 4.8 Momen inersia segmen kaki ... IV-25 Tabel 4.9 Data parameter ... IV-26 Tabel 4.10 Kecepatan linear dan angular fase initial contact ... IV-27 Tabel 4.11 Percepatan linear dan angular fase initial contact ... IV-27 Tabel 4.12 Data input fase initial contact kaki prosthetic ... IV-28 Tabel 4.13 Data input fase initial contact kaki normal ... IV-30 Tabel 4.14 Besarnya external work dan komponen kaki prosthetic ... IV-32 Tabel 4.15 Besarnya external work dan komponen kaki normal ... IV-32 Tabel 5.1 Parameter pengukuran gerakan kaki fase intial contact dan
terminal stance ... V-3 Tabel 5.2 Parameter pengukuran gerakan kaki fase loading respons dan
pre-swing ... V-9 Tabel 5.3 Parameter pengukuran gerakan kaki fase stance dan
commit to user
xiv
commit to user
xv
DAFTAR GAMBAR
commit to user
xvi
Gambar 2.31 Energy storing knee prosthetic ... II-31 Gambar 3.1 Metodologi penelitian ... III-1 Gambar 3.2 Alat ukur ... III-4 Gambar 3.3 Force gauge ... III-5 Gambar 3.4 Electrogoniometer Rf ... III-6 Gambar 4.1 Energy storing knee prosthetic knee dengan mekanisme 2 bar IV-3 Gambar 4.2 Gas Spring ... IV-4 Gambar 4.3 Amputee menggunakan prosthetic energy storing ... IV-5 Gambar 4.4 Ankle joint sistem double axis ... IV-5 Gambar 4.5 Fase berjalan pengguna prosthetic atas lutut ... IV-7 Gambar 4.6 Fase initial contact ... IV-10 Gambar 4.7 Stick diagram kaki prosthetic fase initial contact ... IV-11 Gambar 4.8 Stick diagram kaki normal fase initial contact ... IV-16 Gambar 4.9 Grafik T1 kaki prosthetic dan kaki normal ... IV-33
Gambar 4.10 Grafik T2 kaki prosthetic dan kaki normal ... IV-33
Gambar 4.11 Grafik T3 kaki prosthetic dan kaki normal... ... IV-34
Gambar 4.12 Grafik Fx kaki prosthetic dan kaki normal ... IV-34
Gambar 4.13 Grafik Fy kaki prosthetic dan kaki normal ... IV-35
Gambar 4.14 Grafik wkaki prosthetic dan kaki normal ... IV-35 Gambar 5.1 Gerakan kaki fase initial contact-fase terminal stance ... V-2 Gambar 5.2 Komparasi nilai torsi fase initial contact-terminal stance ... V-4 Gambar 5.3 Komparasi nilai gaya fase initial contact dan fase terminal
stance ... V-6 Gambar 5.4 Komparasi nilai external work fase initial contact
dan fase terminal stance ... V-7 Gambar 5.5 Gerakan kaki fase loading respons-fase pre-swing ... V-8 Gambar 5.6 Komparasi nilai torsi fase loading respons dan fase
pre-swing... ... V-10 Gambar 5.7 Komparasi nilai gaya fase loading respons dan fase
pre-swing... ... V-11 Gambar 5.8 Komparasi nilai external work fase loading respons dan fase
commit to user
xvii
Gambar 5.9 Gerakan kaki fase mid-stance-fase mid-swing ... V-13 Gambar 5.10 Komparasi nilai torsi fase mid-stance dan fase mid-swing .... V-15 Gambar 5.11 Komparasi nilai gaya fase mid-stance dan fase mid-swing ... V-16 Gambar 5.12 Komparasi nilai external work fase stance dan fase
commit to user
xviii
DAFTAR LAMPIRAN
Lampiran 1 Pemodelan external work dan komponennya
pada fase 2 sampai fase 8... L-1 Lampiran 2 Perhitungan external work dan komponennya
commit to user
I - 1
BAB I
PENDAHULUAN
Bab ini membahas hal-hal yang menjadi dasar permasalahan penelitian yang diambil, meliputi latar belakang penelitian, perumusan masalah, tujuan yang ingin dicapai, manfaat penelitian, pembatasan masalah, asumsi-asumsi yang digunakan, dan sistematika penulisan dalam penelitian ini.
1.1LATAR BELAKANG
Berjalan (gait) merupakan kegiatan yang kompleks hampir melibatkan seluruh sistem muskuloskeletal dan menuntut koordinasi yang sangat baik pada gerakan di bawah sadar seorang (Farber, 1995). Oleh karena itu berjalan mengeluarkan banyak energi, semakin cepat orang berjalan maka semakin banyak energi yang dikeluarkan (Rose, 2006). Kemampuan untuk berjalan cepat adalah kebutuhan dasar untuk aktivitas rekreasi secara fisik. Berjalan cepat juga penting untuk kesehatan fisik dan mental dan sebagai pencegah dari cedera seperti terjatuh dan menghindari situasi lingkungan yang mengancam (Burgess, 1985). Namun apabila salah satu kaki mengalami amputasi maka akan mengurangi sebagian fungsi anggota gerak bawah (Wilken, 2009).
Dalam banyak kasus, bagian anggota gerak bawah ini digantikan suatu alat mekanik yang umum dikenal dengan nama kaki palsu atau prosthetic (Hansen, 2010). Salah satu teknologi yang sedang dikembangkan adalah prosthetic dengan sistem energy storing mekanisme 2 bar. Energy storing merupakan salah satu teknologi yang dianalogikan sebagai sebuah pegas yang ketika meregang dan mengendur dapat menyimpan dan kemudian melepaskan energi potensial elastik. Mekanisme 2 bar memiliki 2 link dan 1 joint seperti pada engsel dimana joint
berfungsi menghubungkan 2 link dan sebagai sumbu putar lutut yang mengakibatkan knee joint dapat melakukan flexion dan extension. Menurut Farber (1995), konsumsi energi menurun 35% dan koefisien energi pembalik meningkat 30% dibandingkan prosthetic konvensional saat amputee berjalan menggunakan
commit to user
I - 2
(1998) yang menguji prosthetic sistem energy storing pada kecepatan 0.7 m/s – 1.4 m/s. Hasil penelitian tersebut menunjukkan bahwa pada jarak tertentu, semakin cepat amputee berjalan maka jumlah konsumsi energi menurun dan menjadi stabil pada kecepatan 0.7 m/s – 1.4 m/s dengan rata-rata konsumsi energi 1.2 cal/kg/m. Berdasarkan hal tersebut maka dapat dinyatakan bahwa sistem
energy storing pada prosthetic semakin dibutuhkan untuk kecepatan berjalan yang semakin tinggi.
Penyelesaian penentuan energi pada pengguna prosthetic sistem energy storing saat aktivitas berjalan cepat menggunakan kajian dynamiccycle gait yang dimodelkan dengan persamaan lagrange. Kajian dynamic cycle gait merupakan kajian gerakan berjalan manusia secara kontinu dengan memperhitungkan waktu sedangkan kajian static cycle gait merupakan kajian gerakan berjalan manusia secara diskrit tanpa memperhitungkan waktu (Vaughan,1999). Kajian static cycle gait tidak cocok digunakan dalam mengukur kemampuan energy storing pada aktivitas berjalan cepat karena aktivitas berjalan cepat dipengaruhi adanya parameter kecepatan. Menurut David A. Winter (1990) lagrange dari suatu sistem dikatakan sebagai perbedaan antara jumlah energi kinetik yang terjadi dalam sistem dan jumlah energi potensial dalam sistem. Salah satu bentuk energi potensial adalah energi potensial pegas atau spring potensial energy. Energi potensial pegas ini diterapkan pada prosthetic dalam bentuk sistem energy storing
sehingga formulasi model fase berjalan cepat amputee yang menggunakan
prosthetic sistem energy storing lebih mudah karena persamaan lagrange
mengakomodasi adanya energy storing dalam memformulasikan model.
Berdasarkan hal tersebut maka digunakan kajian dynamic cycle gait yang diformulasikan dengan persamaan lagrange dalam mengukur kemampuan
prosthetic sistem energy storing pada aktivitas berjalan cepat. Penelitian ini diharapkan mampu mengukur kemampuan prosthetic atas lutut model
endoskeletal dengan energy storing mekanisme 2 bar dalam menunjang amputee
commit to user
I - 3
1.2PERUMUSAN MASALAH
Perumusan masalah dalam penelitian ini adalah bagaimana kemampuan
prosthetic atas lutut model endoskeletal dengan sistem energy storing mekanisme 2 bar untuk membantu aktivitas berjalan cepat pada bidang datar dengan dynamic cycle gait.
1.3TUJUAN PENELITIAN
Tujuan yang dicapai dalam penelitian ini yaitu mengetahui kemampuan
prosthetic atas lutut model endoskeletal dengan energy storing mekanisme 2 bar dalam menunjang amputee atas lutut ketika melakukan aktivitas berjalan cepat pada bidang datar dengan dynamic cycle gait.
1.4MANFAAT PENELITIAN
Manfaat yang dapat diperoleh dari penelitian ini yaitu memberikan rekomendasi dalam pengembangan penelitian prosthetic atas lutut model
endoskeletal dengan sistem energy storing.
1.5BATASAN MASALAH
Agar sasaran dalam penelitian ini tercapai, maka diperlukan batasan-batasan, sebagai berikut:
1. Pengambilan data dilakukan terhadap satu pasien laki-laki usia 49 tahun pengguna prosthetic kaki atas lutut saat berjalan cepat pada bidang datar. 2. Formulasi model fase berjalan cepat pada analisis dynamic cycle gait
menggunakan persamaan lagrange of motion.
1.6ASUMSI PENELITIAN
Asumsi-asumsi yang digunakan dalam penelitian ini, sebagai berikut: 1. Anggota gerak atas dan tubuh (kepala, leher, tangan, dan batang tubuh)
pengguna prosthetic dianggap sebagai beban.
2. Satu siklus gerakan berjalan cepat secara lengkap dibagi menjadi delapan fase gerakan.
commit to user
I - 4
4. Kajian gerakan berjalan cepat pada penelitian ini tidak memperhitungkan gaya gesek yang terjadi saat aktivitas berjalan cepat.
1.7SISTEMATIKA PENULISAN
Penyusunan tugas akhir ini terbagi menjadi beberapa bab yang berisi uraian penjelasan dan dibagi kembali dalam beberapa topik subbab. Secara garis besar, uraian pada bab-bab dalam sistematika penulisan, dijelaskan di bawah ini.
BAB I PENDAHULUAN
Bab ini menguraikan berbagai hal mengenai latar belakang perlunya diadakan penelitian, perumusan masalah, tujuan penelitian, manfaat penelitian, batasan masalah, asumsi-asumsi dan sistematika penulisan. Uraian bab ini dimaksudkan untuk menjelaskan latar belakang penelitian sehingga dapat memberikan manfaat sesuai dengan tujuan penelitian dengan batasan-batasan dan asumsi yang digunakan.
BAB II TINJAUAN PUSTAKA
Bab ini berisi dasar-dasar teori yang menjadi landasan bagi penelitian, baik dari buku, jurnal, maupun berbagai sumber literatur lainnya. Bab ini menjelaskan tentang human motion, human locomotion, keseimbangan gerak, human amputee locomotion, prosthetic atas lutut dan energy storing.
BAB III METODOLOGI PENELITIAN
Merupakan gambaran terstruktur yang disusun dalam flow chart dari alur pelaksanaan penelitian tugas akhir. Metodologi menguraikan materi penelitian, alat, tata cara penelitian, variabel dan data yang dikaji serta cara analisis yang dipakai untuk menarik kesimpulan. Kerangka metodologi penelitian disusun mulai dari tahap identifikasi permasalahan awal, tahap pengumpulan dan pengolahan data, penentuan usaha (work) dan energi serta nilai torsi pada setiap joint pengguna prosthetic atas lutut
commit to user
I - 5
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA
Menjelaskan proses pengumpulan dan pengolahan data yang diperoleh selama pelaksanaan penelitian, sesuai dengan usulan permasalahan yang diangkat. Data yang dikumpulkan berupa data anthropometri amputee, data dimensi prosthetic endoskeletal dengan energy storing, serta data pengukuran sudut (θ) gerakan pada ankle, knee dan hip joint saat fase berjalan cepat dalam satu siklus gerakan. Selanjutnya, data yang diperoleh diolah dengan menggunakan pendekatan teori yang relevan dengan pokok permasalahan yang dibahas dalam penelitian.
BAB V ANALISIS DAN INTERPRETASI HASIL
Tahap analisis dan interpretasi hasil berisi pembahasan permasalahan yang ada berdasarkan hasil pengumpulan dan pengolahan data yang telah dilakukan pada bab sebelumnya. Bab ini menguraikan hasil pengukuran besarnya usaha (work) dan energi serta nilai torsi pada setiap joint dalam satu siklus gerakan berjalan cepat pada pengguna prosthetic atas lutut tipe
endoskeletal.
BAB VI KESIMPULAN DAN SARAN
commit to user
II - 1
BAB II
TINJAUAN PUSTAKA
Penelitian ini menggunakan konsep biomekanik dan gerakan manusia sebagai landasan teori yang memberikan acuan dalam mengevaluasi masalah yang dibahas dalam penelitian ini. Konsep biomekanik digunakan untuk memodelkan manusia dalam suatu sistem benda jamak yang tersusun dari stick diagram pada setiap joint yang saling terhubung membentuk satu kesatuan. Tinjauan pustaka mengenai gerak anggota tubuh bagian bawah (kaki) manusia, prinsip gerakan berjalan dan prinsip biomekanik anggota gerak bagian bawah (kaki) manusia diperlukan untuk mengetahui keseluruhan konsep kajian pendukung penelitian
prostheticendoskeletal atas lutut.
2.1HUMAN MOTION
Gerak adalah suatu perubahan tempat kedudukan pada suatu benda dari titik keseimbangan awal. Sebuah benda dikatakan bergerak jika benda itu berpindah kedudukan terhadap benda lainnya baik perubahan kedudukan yang menjauhi maupun yang mendekati (www.organisasi.org, 2006).
Gambar 2.1 Tipe analisis gerakan
Sumber: Hamill dan Knutzen , 2009
commit to user
II - 2
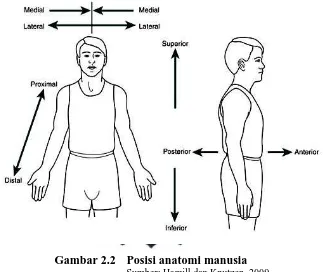
yang berasal di pusat gravitasi adalah bidang sagital, yang membagi tubuh ke kanan dan kiri; bidang frontal, membagi tubuh ke depan dan belakang, dan bidang melintang, membagi tubuh ke atas dan bawah. Gerakan terjadi di atau sejajar dengan bidang pada sumbu mediolateral (bidang sagital), sumbu anteroposterior
(bidang frontal), atau sumbu longitudinal (bidang melintang). Referensi bidang ini penting digunakan untuk menyediakan uraian spesifik dalam suatu gerakan.
Gambar 2.2 Posisi anatomi manusia
Sumber: Hamill dan Knutzen, 2009
2.1.1 Perspektif Analisis Gerakan Manusia
commit to user
II - 3
kinematika terdiri atas penguraian gerakan yang menyebabkan seberapa cepat benda bergerak, seberapa tinggi benda bergerak dan berapa jauh perpindahannya. Sehingga posisi, kecepatan dan gerakan adalah perhatian utama pada analisa kinematik.
Kinetik adalah area studi yang meneliti gaya yang terjadi pada sistem. Analisis yang dilakukan adalah dengan menguraikan gaya yang menyebabkan gerakan. Hal ini lebih sulit dilakukan dan dipahami karena gaya tidak dapat dilihat, hanya efek dari gaya yang dapat diamati. Evaluasi terhadap gaya yang dihasilkan pada tubuh sangat penting dilakukan, karena bertanggungjawab pada terbentuknya seluruh gerakan dan untuk mempertahankan posisi atau postur tubuh saat kita tidak bergerak.
2.1.2 Gerakan Dasar Anggota Gerak Bawah Manusia
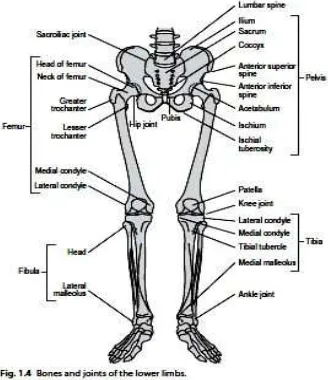
Anggota gerak adalah bagian tubuh yang dipergunakan untuk bergerak dan berpindah tempat. Anggota gerak ini dibagi menjadi anggota gerak atas (lengan dan tangan, upperlimb) dan anggota gerak bawah (tungkai dan kaki, lower limb). Tulang-tulang yang membentuk anggota gerak bawah meliputi tulang panggul (oscoxae),tulang tungkai atas (femur),tulang kering (tibia), tulang betis (fibula),
tulang pergelangan kaki (tarsal bones), tulang telapak kaki (metatarsal),dan tulang jari kaki (Wibowo, 2005).
Gambar 2.3 Tulang dan sambungan anggota gerak bawah
commit to user
II - 4
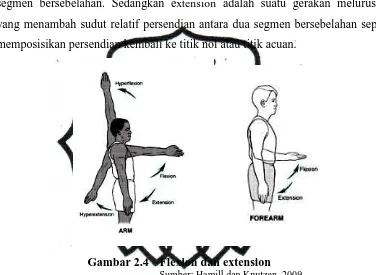
Menurut Joseph Hamill dan Kathleen M. Knutzen tahun 2009, enam pergerakan dasar terjadi pada berbagai kombinasi di dalam persendian tubuh anggota gerak bawah. Dua pergerakan pertama yaitu flexion dan extension yang terjadi pada mata kaki, ankle, pinggul dan jari kaki. Flexion adalah suatu pergerakan membengkok yang mengurangi sudut relatif persendian antara dua segmen bersebelahan. Sedangkan extension adalah suatu gerakan meluruskan yang menambah sudut relatif persendian antara dua segmen bersebelahan seperti memposisikan persendian kembali ke titik nol atau titik acuan.
Gambar 2.4 Flexion dan extension
Sumber: Hamill dan Knutzen, 2009
commit to user
II - 5
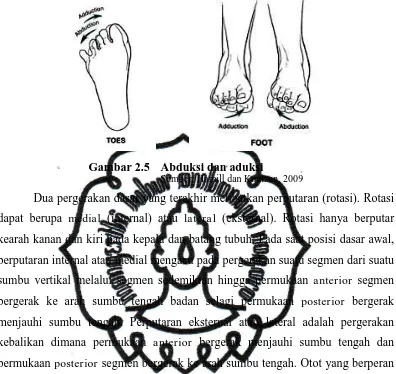
Gambar 2.5 Abduksi dan aduksi
Sumber: Hamill dan Knutzen, 2009
Dua pergerakan dasar yang terakhir melibatkan perputaran (rotasi). Rotasi dapat berupa medial (internal) atau lateral (eksternal). Rotasi hanya berputar kearah kanan dan kiri pada kepala dan batang tubuh. Pada saat posisi dasar awal, perputaran internal atau medial mengacu pada pergerakan suatu segmen dari suatu sumbu vertikal melalui segmen sedemikian hingga permukaan anterior segmen bergerak ke arah sumbu tengah badan selagi permukaan posterior bergerak menjauhi sumbu tengah. Perputaran eksternal atau lateral adalah pergerakan kebalikan dimana permukaan anterior bergerak menjauhi sumbu tengah dan permukaan posterior segmen bergerak ke arah sumbu tengah. Otot yang berperan dalam pergerakan rotasi kaki diantaranya, otot tibialis posterior dimana menggerakkan toes ke sisi medial, sedangkan otot peroneus longus menggerakkan bagian toes ke arah lateral. Pergerakan ini sangat bergantung pada persendian
ankle dan subtalar joint.
Gambar 2.6 Rotasi persendian lutut
commit to user
II - 6
2.2BERJALAN CEPAT
Jalan cepat adalah gerak maju dengan melangkah tanpa adanya hubungan terputus dengan tanah. Setiap kali melangkah kaki depan harus menyentuh tanah sebelum kaki belakang meninggalkan tanah. Saat melangkah satu kaki harus berada di tanah, maka kaki tersebut harus lurus atau lutut tidak bengkok dan tumpuan kaki dalam keadaan posisi tegak lurus (www.moccasport.com, 2009).
Gambar 2.7 Teknik jalan cepat
Sumber: www.moccasport.com, 2009
Gambar 2.7 menunjukkan teknik berjalan cepat dimana posisi badan saat bergerak maju cenderung lebih condong ke depan. Posisi kaki saat melangkah lurus ke depan satu garis dengan garis khayal dari badan atau garis khayal di antara kedua ujung kaki (jari-jari) segaris, tidak ke luar atau ke dalam. pada saat menumpu tumit harus mendarat lebih dahulu terus bergerak ke arah depan secara teratur.
Menurut Boonstra (1993), pengukuran berjalan cepat sebagai alat dalam melakukan gait analysis berdasarkan pada asumsi bahwa kecepatan berjalan adalah parameter dasar yang jika diukur secara objektif dapat menunjukkan kemampuan berjalan seseorang. Pada umumnya orang normal berjalan lebih cepat daripada amputee. Kecepatan berjalan amputee dipengaruhi oleh stride length
commit to user
II - 7
Menurut Taylor, (1996) kecepatan berjalan diklasifikasikan menjadi 3 jenis yaitu lambat, normal dan cepat dengan masing-masing kecepatan secara berurutan sebesar 4,4 km/jam, 5,1km/jam dan 5,5 km/jam.
2.3HUMAN LOCOMOTION
Locomotion atau daya penggerak merupakan karakteristik dari manusia, adalah proses dimana manusia itu bergerak sendiri dari satu posisi geografis ke posisi yang lain. Locomotion termasuk mulai, berhenti, perubahan kecepatan, perubahan arah, dan modifikasi untuk perubahan di lereng. Kejadian-kejadian ini, bagaimanapun, adalah kegiatan sementara yang ditumpangkan pada suatu pola dasar. Dalam berjalan dan berlari manusia, pola ini dapat didefinisikan sebagai perpindahan berirama bagian tubuh yang menjaga manusia berjalan maju secara konstan (Rose, 2006).
2.3.1 Human Locomotion
Jika berjalan adalah kegiatan belajar, tidak mengherankan bahwa tiap masing-masing individu menampilkan keunikan pribadi tertentu pada pola dasar gerak bipedal. antropolog fisik telah mempelajari perbedaan antara ras dan mengukur variasi di bagian rangka. Ahli anatomi menyadari adanya variasi individu. Semua dari kita menyadari bahwa tiap orang mempunyai cara berjalan yang berbeda, seseorang dapat mengenali seorang kenalan dengan sikapnya berjalan bahkan ketika dilihat dari kejauhan. Orang-orang mengubah cara mereka berjalan ketika memakai sepatu dengan tumit tinggi yang berbeda. Seseorang berjalan berbeda bila gembira daripada saat mental tertekan (Rose, 2006).
Berjalan merupakan suatu rangkaian dari gait cycle, dimana satu gait cycle
dikenal dengan sebutan langkah (stride). Stride length merupakan jarak linear antara point saat telapak kaki dari salah satu kaki menapak dengan point
selanjutnya saat telapak kaki yang sama menapak pada lantai. Step length adalah jarak linear antara point saat salah satu kaki menapak dengan saat kaki yang lain menapak pada lantai.
commit to user
II - 8
tersebut kembali mengenai landasan. Gambar 2.7 menunjukkan pembagian gait cycle.
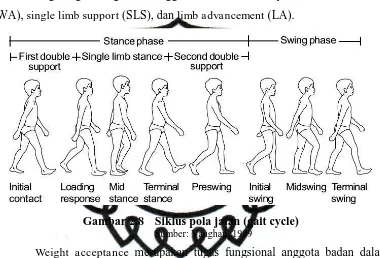
Gait cycle terdiri dari 2 periode yaitu periode berdiri (stance) dimana anggota badan (kaki) mengenai landasan, dan periode mengayun (swing) dimana anggota badan tidak mengenai landasan. Gait cycle dibagi delapan fase yang memiliki tiga tugas fungsional anggota tubuh diantaranya, weight acceptance
(WA), single limb support (SLS), dan limb advancement (LA).
Gambar 2.8 Siklus pola jalan (gait cycle)
Sumber: Vaughan, 1999
Weight acceptance merupakan tugas fungsional anggota badan dalam menerima beban badan keseluruhan pada saat berjalan, melakukan penyerapan goncangan saat berjalan dari gaya jatuh bebas tubuh, stabilisasi awal dalam periode berdiri dan memelihara momentum forward progression. Tugas tersebut terdiri dari 2 fase pada gait cycle yaitu initial contact/heel strike (HS) dan loading respons/foot flat (FF). Periode berdiri diikuti dengan pendukung anggota tubuh tunggal (single limb support/SLS) terdiri dari fase mid-stance, dan fase terminal stance. Selama melakukan tugas weight acceptance, anggota badan berdiri dengan tanggung-jawab untuk menahan berat tubuh sementara anggota tubuh lainnya berada pada periode mengayun. Tugas fungsional ketiga yaitu limb advancement
commit to user
II - 9
advancement untuk mempersiapkan fase berikutnya. Fase pre-swing melakukan sekaligus dua tugas yaitu tugas fungsional single limb support dan limb advancement (Perry, 1992).
2.3.2 Fase Gait Cycle
Berkaitan dengan waktu, gait cycle pada setiap fase memiliki persentase waktu tertentu. Christopher L Vaughan (1999) menganalogikan siklus cara orang berjalan dengan gerak putar roda. Dengan menggambar siklus pola gerakan roda tersebut, maka titik awal roda akan berputar berulan-ulang, langkah demi langkah. Dalam persentase waktu gait cycle, 60% dilakukan pada periode berdiri (stance) dan 40% pada periode berayun (swing).
Gambar 2.9 Diagram waktu gait
commit to user
II - 10
Gambar 2.10 Persentase gait cycle
Sumber: Whittle, 2007
Berikut ini adalah masing-masing fase gait cycle (Whittle, 2007), yaitu :
1. Initial Contact/Heel Strike (HO).
Initial contact adalah awal dari loading respon, yang merupakan periode pertama dari stance phase. Initial contact sering disebut “ heel strike”, karena pada individu normal sering kali ada dampak berbeda antara tumit dan tanah, yang dikenal sebagai “heelstrike transient”. Nama lain untuk kejadian ini adalah “heel contact, “footstrike” atau “foot contact”.
Gambar 2.11 Gerakan kaki pada fase initial contact
Sumber: Whittle, 2007
Bagian trunk berada sekitar setengah panjang langkah di belakang kaki depan. Pada posisi initial contact bagian trunk berputar, bahu kiri dan sisi kanan
commit to user
II - 11
belakang. Fleksi maksimum pinggul (umumnya sekitar 30°) tercapai sekitar pertengahan fase ayunan dan berubah sedikit sampai initial contact. Lutut agak lurus sesaat sebelum terjadi initial contact kemudian fleksi setelah terjadi initial contact. Jumlah ayunan lengan bervariasi pada setiap orang dan meningkat seiring bertambahnya kecepatan berjalan. Ketika posisi initial contact Murray (1967) menemukan rata-rata siku flexion sebesar 8° dan bahu flexion sebesar 45°. Bagian
ankle menuju posisi netral atau datar.
2. Loading Respons (Foot Flat).
Fase loading respons adalah periode double support antara fase initial contact dan fase mid- stance. Fase loading respons terjadi pada persentase waktu sekitar 7% dari gait cycle. Bagian atas tubuh selama loading respons, trunk berada pada posisi terbawahnya sekitar 20 mm di bawah posisi normal, seperti ditunjukkan pada gambar 2.11.
Gambar 2.12 Gerakan kaki fase loading respons
Sumber: Whittle, 2007
commit to user
II - 12 3. Mid-stance.
Fase mid-stance adalah akhir dari periode double support dan awal dari periode single support. Fase mid-stance terjadi pada periode persentase waktu gait cycle pada 7-32% dan mewakili 18% dari gait cycle. Hip mengalami fleksi sebesar 25%. Bersamaan pada fase ini, terjadi perpindahan berat oleh kaki pada periode stance (kaki kanan, warna gelap), sedangkan kaki lainnya (kaki kiri, warna terang) berada fase mid-swing (lihat gambar 2.13).
Gambar 2.13 Gerakan kaki fase mid-stance
Sumber: Whittle, 2007
Pada posisi mid-stance, energi kinetik berubah menjadi energi potensial.
Trunk naik ke posisi tertinggi sekitar 20 mm di atas level rata-rata dan perputaran
trunk sudah tidak ada. Gerakan sisi ke sisi trunk mencapai puncaknya pada posisi
mid-stance dan berubah posisi sekitar 20 mm dari posisi tengah. Seperti kaki, lengan melewati satu sama lain selama mid-stance karena mengikuti masing-masing kaki yang berbeda.
4. Terminal Stance (Heel Off).
commit to user
II - 13
Gambar 2.14 Gerakan kaki pada fase terminal stance
Sumber: Whittle, 2007
Saat tubuh bergerak ke depan, beban tubuh berpindah dari bagian tumit ke bagian jari kaki. Saat fase ini, bagian heel meninggi yang diikuti kenaikan knee flexion 0°-40°dan hipextension 20°-0°. Kenaikan bagian heel menyebabkan trunk
bergerak turun dari posisi tertingginya. Ankle dalam posisi peralihan dari dorsi flexion sebesar 10° lalu bergerak 20° plantar flexion. Posisi tubuh mulai jatuh ke depan dengan salah satu kaki berayun untuk mencapai tanah. Dalam posisi ini berat tubuh mulai berpindah dari belakang menuju left leg.
5. Pre-Swing (Toe-Off).
Fase pre-swing dimulai dengan fase initial contact (heel strike) oleh kaki kiri (warna terang), dan kaki kanan (warna gelap) berada posisi meninggalkan landasan untuk melakukan periode mengayun (toe-off), seperti ditunjukkan oleh gambar 2.15. Periode waktu pre-swing terjadi pada persentase waktu gait cycle
50-57%, dan mulai terjadi pelepasan berat tubuh oleh kaki yang bersangkutan.
Gambar 2.15 Gerakan kaki pada fase pre-swing
Sumber: Whittle, 2007
commit to user
II - 14
ini, bagian hip tetap dalam kondisi flexion sedangkan knee flexion bergerak menurun dari sudut elevasi sebesar 40° hingga 0°. Ankle berada dalam puncak
plantar flexion dimana membentuk sudut sebesar 25°.
6. Initial Swing (Acceleration).
Fase swing merupakan fase dimana kaki tidak berada di landasan atau pada posisi berayun. Fase swing terdiri dari tiga fase yaitu: Initial swing, mid-swing, dan terminal swing. Fase keenam merupakan fase initial swing, dimana kaki mulai melakukan ayunan, persentase initial swing adalah 60%-73% dari periode waktu gait cycle. Fase initial swing dimulai pada saat telapak kaki kanan (warna gelap) mulai diangkat dari posisi landasan (toe off), sedangkan kaki kiri (warna terang) berada pada posisi mid-stance, seperti ditunjukkan oleh gambar 2.16 (Perry, 1992).
Gambar 2.16 Gerakan kaki fase pada initial swing
Sumber: Perry, 1992
7. Mid-Swing.
Fase kedua dari periode swing adalah fase mid-swing yang ditunjukkan pada gambar 2.17. Fase mid-swing yang dimulai dengan ayunan kaki kanan dan dilanjutkan sampai kaki kanan (warna gelap) mengayun maju berada di depan anggota badan sebelum mengenai landasan dan kaki kiri lurus (hip dan knee
commit to user
II - 15
Gambar 2.17 Gerakan kaki pada fase mid-swing
Sumber: Perry, 1992
8. Terminal Swing (Decceleration).
Fase terminal swing merupakan akhir dari gait cycle, terjadi pada periode waktu gait cycle 87%-100%. Fase ini berfungsi untuk perlambatan limb dan persiapan perpindahan berat. Fase terminal swing dimulai pada saat akhir dari fase
mid-swing, dimana tungkai kaki mengalami perpanjangan maksimum dan
berhenti pada saat heel telapak kaki kanan (warna gelap) mulai mengenai landasan. Pada periode ini, posisi kaki kanan (warna gelap) berada kembali berada depan anggota badan, seperti pada posisi awal gait cycle, seperti ditunjukkan oleh gambar 2.18.
Gambar 2.18 Gerakan kaki pada fase terminal swing
commit to user
II - 16
2.4ANALISIS GERAK BIOMEKANIKA
Menurut Michael W. Whittle (2007) biomekanika adalah disiplin ilmu yang mempelajari sistem biologi, seperti tubuh manusia, dengan metode teknik mesin. Bagian terpenting pada gerakan berjalan dari pengguna prosthetic adalah keseimbangan beban tubuh amputee. Sehingga prosthetic yang baik harus mampu memberikan keseimbangan beban. Gerakan berjalan pada orang normal, memperlihatkan bagaimana kedua kaki saling menyeimbangkan beban tubuh dalam pergerakan berpindah. Pada saat berjalan dan kaki menyentuh lantai, beban tubuh yang dihasilkan dari efek tekanan gravitasi bumi akan menimbulkan gaya reaksi ke atas. Pada amputee, pemindahan gaya pada prosthetic dan kaki yang lain dikatakan baik apabila selama proses berjalan pengguna prosthetic melangkah secara normal yaitu tidak terjadi gap dengan kaki yang sehat (Wibowo, 2009).
2.5ANTHROPOMETRI DATA BIOMEKANIKA
Anatomi tubuh manusia terdiri dari segmen tubuh yang dihubungkan oleh persendian. Analisis biomekanika digunakan untuk memodelkan manusia dalam suatu sistem benda jamak yang tersusun dari link (penghubung) dan joint
(sambungan). Link mewakili segmen tubuh dan joint menggambarkan sendi yang ada. Menurut Chaffin (1999), tubuh manusia terdiri dari enam link, sebagai berikut:
1. Link lengan bawah yang dibatasi oleh joint telapak tangan dan siku. 2. Link lengan atas yang dibatasi oleh joint siku dan bahu.
3. Link punggung yang dibatasi oleh joint bahu dan pinggul. 4. Link paha yang dibatasi oleh joint pinggul dan lutut. 5. Link betis yang dibatasi oleh joint lutut dan mata kaki.
commit to user
II - 17
Gambar 2.19 Tubuh sebagai sistem enam link dan joint
Sumber: Chaffin, 1999
Menurut Chaffin (1999), anthropometri merupakan ilmu yang berhubungan dengan pengukuran massa, bentuk, ukuran dan inersial tubuh manusia. Hasil dari pengukuran ini berupa data statistik yang menggambarkan ukuran, massa dan bentuk tubuh manusia. Data anthropometri merupakan fundamen dasar biomekanika yang digunakan untuk membangun model biomekanika yang mengkaji kekuatan dan gaya pada tubuh manusia.
commit to user
II - 18
Gambar 2.20 Permodelan titik-titik pusat massa dempster
Sumber: Chaffin, 1999
Pada penentuan massa tiap segmen, tubuh manusia digambarkan sebagai
stick diagram seperti pada pemodelan Dempters (1955) dalam Chaffin, (1999). Persentase massa segmen tubuh ditentukan berdasarkan pemodelan distribusi berat tubuh (Webb Associaties, 1978 dalam Chaffin, 1999).
Tabel 2.1 Pemodelan distribusi berat badan
commit to user
II - 19
2.6KESEIMBANGAN GERAK BIOMEKANIKA
Pada pengguna prosthetic, analisis biomekanika digunakan untuk mengetahui pola berjalan amputee apakah telah sesuai dengan pola berjalan normalnya (Radcliffe dan Foort, 1991). Hal ini diketahui dengan keseimbangan gaya dan torsi serta tingkat keluaran energi selama amputee berjalan dalam suatu periode waktu.
2.6.1 Keseimbangan Gerakan Manusia
Keseimbangan adalah kemampuan untuk mempertahankan kesetimbangan tubuh ketika ditempatkan diberbagai posisi. Definisi menurut O’Sullivan (2008), keseimbangan adalah kemampuan untuk mempertahankan pusat gravitasi pada bidang tumpu terutama ketika saat posisi tegak. Selain itu menurut Thomson (2008), keseimbangan adalah kemampuan untuk mempertahankan tubuh dalam posisi kesetimbangan maupun dalam keadaan statis atau dinamis, serta menggunakan aktivitas otot yang minimal. Keseimbangan juga bisa diartikan sebagai kemampuan relatif untuk mengontrol pusat massa tubuh (center of mass) atau pusat gravitasi (center of gravity) terhadap bidang tumpu (base of support). Keseimbangan melibatkan berbagai gerakan di setiap segmen tubuh dengan di dukung oleh sistem muskuloskleletal dan bidang tumpu. Kemampuan untuk menyeimbangkan massa tubuh dengan bidang tumpu akan membuat manusia mampu untuk beraktivitas secara efektif dan efisien.
commit to user
II - 20
2.6.2 Torsi
Menurut Hall (1999), selain bergerak sesuai arah bekerjanya, benda cenderung untuk memutar dalam suatu sumbu. Perputaran benda tersebut dikarenakan adanya gaya yang menyebabkan perpindahan, atau disebut torsi. Torsi (T) yang juga dikenal sebagai puntiran (momen gaya) merupakan hasil kali antara gaya (F) dan lengan gaya (d).
T= F x d...persamaan 2.2
Gambar 2.21 Sebuah torsi
Sumber: Lohat, 2010
Pada tubuh manusia, torsi dibangkitkan oleh otot dalam suatu pusat persendian yang merupakan hasil dari gaya yang bereaksi terhadap jarak antara garis gaya otot dengan pusat persendian tersebut (Hall, 1999). Saat joint bergerak pada suatu jarak, terjadi perubahan momen gaya pada otot yang melintasi persendian. Perubahan pada momen secara langsung menyebabkan joint torque
yang dibangkitkan oleh otot. Saat berjalan, secara signifikan akan lebih banyak gaya diperlukan ketika torsi dibangkitkan oleh single support foot dimana momen akan mengurangi jarak antara tulang metatarsal dengan calcaneus.
Young dan Freedman (1999) dalam Fisika Universitas menyatakan bahwa torsi merupakan besaran vektor, sehingga selain mempunyai besar, torsi juga mempunyai arah. Suatu vektor T mempunyai arah tegak lurus terhadap bidang benda. Arah Tadalah tergantung pada arah berputarnya benda akibat gaya F dan d
commit to user
II - 21
2.6.3 Work
Work merupakan kombinasi lain dari analisis kinematika dan kinetika (Karduna, 2004). Secara ilmiah work terjadi ketika gaya bekerja pada suatu objek sehingga objek bergerak dalam jarak tertentu. Sebuah gaya melakukan work
apabila benda yang dikenai gaya mengalami perpindahan. Work merupakan besaran skalar, dimana satuan dalam Sistem Internasional (SI) adalah Joule. Secara matematis, usaha yang dilakukan oleh gaya didefinisikan sebagai hasil kali perpindahan (s,θ) dengan gaya (F, T) yang searah dengan perpindahan.
Wtranslasi = F x s
Wrotasi = T x θ...persamaan 2.3
Gambar 2.22 Usaha oleh sebuah gaya
Sumber: Lohat, 2010
Analisis perubahan kerja mekanik dalam center of mass (COM) pada gerakan berjalan manusia dibedakan menjadi dua macam perspektif (Willems, 1994). Perspektif pertama adalah internal work dimana merupakan perubahan energi mekanik relatif terhadap COM akibat internal force yang menyebabkan terjadinya pergerakan pada tubuh. Perspektif kedua adalah external work dimana berkebalikan dengan konsep internal work. Pergerakan segmen tubuh relatif terhadap COM yang diakibatkan adanya external force dimana terjadi perubahan energi relatif terhadap COM disebut sebagai external work.
2.6.4 Energi
commit to user
II - 22
Energi didefinisikan sebagai kapasitas untuk melakukan kerja (Winter,1990). Usaha dilakukan ketika energi dipindahkan dari satu benda ke benda lain. Jumlah total energi pada sistem dan lingkungan bersifat kekal (Young dan Freedman, 1999). Energi tidak pernah hilang, tetapi hanya dapat berubah bentuk dari satu bentuk energi menjadi bentuk energi lain. Secara garis besar, energi terbagi dalam dua macam, energi potensial dan energi kinetik.
Energi kinetik (EK) merupakan energi gerak. Tubuh memproses energi kinetik hanya saat tubuh dalam keadaan bergerak. Jika tubuh tidak bergerak maka
v = 0 besarnya energi kinetik juga nol. Berikut persamaan matematis energi kinetik dalam gerak translasi dan gerak rotasi (angular).
2
Bentuk yang lain dari energi adalah energi potensial, dimana merupakan energi yang menyatakan posisi suatu objek. Persamaan matematis energi potensial, sebagai berikut:
commit to user
dengan k merupakan konstanta elastis yang menunjukkan keelastisan bahan atau kemampuan untuk menyimpan energi dan berdeformasi. Sedangkan x
menunjukkan besarnya deformasi yang terjadi otot.
2.6.5 Persamaan Gerak Dinamis Lagrange
Model matematika digunakan dalam menemukan solusi optimal gerakan manusia yang dianalogikan dalam suatu sistem benda jamak yang tersusun dari
stick diagrams pada setiap joint yang saling terhubung membentuk satu kesatuan. Perilaku dinamik dari sebuah sistem dinyatakan dalam besaran kinematik dan kinetika. Pada penelitian ini perilaku dinamik dirumuskan melalui persamaan
lagrange berdasarkan sintesis pergerakan manusia oleh Winter (1990), Lagrange
merupakan konsep matematik dinamis yang menggabungkan displacement, usaha (work) dan energi yang bekerja pada sistem, sebagai fungsi dari generalized coordinates, untuk memperoleh turunan kedua dari persamaan gerak.
Lagrangian (L) dari suatu sistem dikatakan sebagai perbedaan antara jumlah energi kinetik yang terjadi dalam sistem dan jumlah energi potensial dalam sistem.
L = KE - PE...persamaan 2.8
Bentuk umum teori lagrange tentang gerak terdapat dalam persamaan 2.7.
i
menunjukkan generalized force. Adapun generalized coordinates (q) digambarkan sebagai parameter yang merepresentasikan sistem konfigurasi secara jelas dalam sistem koordinat.
commit to user
II - 24
2.7HUMAN AMPUTEE GAIT
Munculnya gaya berjalan normal manusia (normal gait) ditentukan oleh berbagai karakteristik gerak manusia. Begitu pula gerak berjalan pada amputee, akan tergantung pada kondisi penentu, misalnya saja sisa bagian tubuh setelah diamputasi (sendi, rangka, joint dan otot), sejauhmana penggunaan prosthetic
mampu menggantikan bagian tubuh yang hilang sesuai fungsional kaki serta
interface yang dibangun antara tubuh dan prosthetic.
Perbedaan yang nyata terjadi pada amputee gait adalah durasi waktu selama siklus berjalan (gait cycle). Permasalahan pada fase berdiri seringkali muncul pada amputee pengguna prosthetic. Ketidaksesuaian knee flexion pada awal fase berdiri terjadi karena ketidakstabilan pada bagian knee. Beberapa masalah juga muncul pada penempatan posterior foot, socket flexion dan
hyperdorsiflexion yang terjadi pada ankle.
Modiolateral knee dapat pula diamati pada fase berdiri. Penempatan foot
yang tidak tepat, kelebihan tekukan pada socket dan dimensi socket yang terlalu melebar sehingga mengurangi kontrol di bagian knee, menjadi salah satu penyebabnya. Seringpula amputee mudah terjatuh saat berjalan, sebab kurang sempurnanya penyesuaian foot terutama pada bagian ankle sehingga terjadi
hyperdorsiflexion.
Rotasi external terjadi pada fase heel strike dalam amputee gait cycle. Penyebabnya adalah kontruksi pada bagian foot (ankle dan SACH) pada kaki
prosthetic. Kontruksi foot terlalu keras dan penempatan yang kurang pas, sehingga terjadi gerakan yang tidak tepat pada bagian ankle.
Gambar 2.23 Amputee gait
commit to user
II - 25
Kenaikan yang terlalu cepat pada heel saat melangkah juga menjadi salah satu titik perhatian dalam amputee gait. Proses fitting prosthetic yang tidak tepat pada setiap amputee menjadi salah satu penyebabnya. Hal ini menjadi penting karena setiap amputee mempunyai karakteristik berbeda pada tipe amputasi dan kondisi stump yang tersisa dari hasil amputasi.
Beberapa masalah dalam amputee gait juga terjadi dalam fase mengayun (swing phase). Hal terpenting dalam fase mengayun adalah kemampuan untuk menahan berat dan mengayunkan kaki dengan ringan. Ketika kemampuan itu tidak dimiliki oleh prosthetic maka akan terjadi ketidakseimbangan cara berjalan
amputee. Sistem suspensi yang buruk, fitting prosthetic yang tidak tepat (terlalu panjang dari kaki normal) dan ketidaksesuaian knee flexion, menjadi salah satu penyebabnya. Dalam mengkoordinir, fase mengayun yang lebih lembut, sebuah
prosthetic harus difasilitasi dengan energy-efficient joint yang mampu menyediakan transfer energi yang cukup dari tubuh ke dalam prosthetic dimana gerakan pada hip dan knee akan tersinkronisasi secara merata.
2.8ABOVE KNEE PROSTHETIC
Prosthetic kaki adalah alat ganti anggota gerak tubuh bagian bawah yang hilang. Ketiadaan kaki bagian atas lutut (above-knee) menyebabkan amputee
kehilangan sebagian paha, knee, shank, dan bagian foot. Penggunaan prosthetic
membantu amputee dalam melakukan aktivitas sehari-hari.
Gambar 2.24 Prosthetic kaki atas lutut
commit to user
II - 26
2.8.1 Komponen prosthetic atas lutut
Pemakai prosthetic atas lutut adalah seseorang yang kehilangan anggota gerak bawah dari bagian paha. Komponen dasar dari prosthetic atas lutut ( above-knee) terdiri dari sabuk atau sistem suspensi, socket, bagian paha (hip), bagian lutut (knee), bagian betis (shank), bagian telapak kaki (foot dan ankle). Bentuk
prosthetic atas lutut ditunjukkan pada gambar 2.26 di bawah ini.
Gambar 2.25 Komponen prosthetic atas lutut
Sumber: www.scipolicy.net, 2009
Berdasarkan penelitian Staff Prosthetics and Orthotics (1990) dalam
Lower Limb Prosthetics, berikut penjelasan komponen penyusun prosthetic atas lutut yaitu:
1. Sistem Suspensi.
Sistem suspensi merupakan bagian yang berfungsi untuk mengaitkan keseluruhan prosthetic pada bagian dari tubuh. Tujuannya agar prosthetic
terpasang sempurna pada tungkai kaki. Secara garis besar terdapat tiga macam sistem suspensi yaitu, cuff suspension dimana manset diikatkan pada bagian paha,
waist belt dimana manset diikatkan mengelilingi pinggang serta thigh corset
commit to user
II - 27
Gambar 2.26 Sistem Suspensi
Sumber: Staff Prosthetics and Orthotics, 1990
2. Socket.
Socket adalah bagian prosthetic sebagai tempat puntung kaki (stump) yang masih tersisa. Socket merupakan alat yang dibentuk dan disatukan dengan shank. Bagian ini menyambung atau berhubungan langsung dengan stump, bahkan tidak jarang socket menempel tepat pada bagian stump. Socket harus mampu menyokong bobot tubuh dan mendukung stump secara kuat dan nyaman untuk semua aktivitas pengguna. Socket dibuat menempel pada stump secara kuat untuk mengurangi gerakan atau gesekan antara socket dan kulit. Gesekan antara socket
dan kulit akan menyebabkan pengguna merasa kurang nyaman selama beraktivitas, dan mengakibatkan resiko yang lebih besar pada abrasi kulit.
3. Knee.
Bagian lutut (knee) merupakan joint untuk menggantikan sendi lutut yang menghubungkan bagian paha dengan bagian betis. Knee prosthetic dibuat berdasarkan data lebar, dan tinggi lutut saat duduk. Adapun 3 fungsi utama knee prosthetic, sebagai berikut:
a. Mendukung gerak berjalan amputee saat stance phase (berdiri).
b. Menghasilkan kontrol untuk memperhalus ayunan langkah selama swing phase.
c. Mengatur keleluasaan gerak saatt duduk dan berlutut.
commit to user
II - 28
Terdapat dua jenis shank yaitu eksoskeletal dan endoskeletal. Eksoskeletal shank
pada umumnya dibuat dari bahan yang ringan namun kuat dan kokoh. Bahan yang sering dipakai misalnya plastik, aluminium dan kayu. Pada eksoskeletal shank, ruang bagian bawah socket dan blok ankle dilubangi untuk mengurangi berat. Pada endoskeletal shank, terdapat tambahan tumpuan yang berupa tonggak untuk lebih memperkokoh dan memudahkan pemindahan beban dari socket ke bagian
foot. Tonggak pada endoskeletal shank biasanya terbuat dari metal pylon. Bagian luar juga dilapisi dengan bahan yang lembut agar penampilan menyerupai kaki yang sebenarnya. Bentuk kedua jenis shank dapat dilihat pada gambar 2.28 dan gambar 2.29.
Gambar 2.27 Eksoskeletal shank,
Sumber: catalog.orthoremedy.com,2010
Gambar 2.28 Endoskeletal shank
commit to user
II - 29
Keuntungan eksoskeletal shank yaitu selain murah, pembuatannya mudah, pelapisan bagian luar lebih berdaya tahan. Kekurangan dari shank ini yaitu kemampuan menopang tubuh lebih kecil dibanding endoskeletal shank. Keuntungan endoskeletal shank yaitu lebih modern, mampu menopang beban tubuh, dan lebih kuat. Kekurangan shank ini yaitu mahal, pembuatan sulit dan rumit.
5. Foot – Ankle.
Foot (kaki dasar) dan ankle merupakan komponen yang menjadi tumpuan pergerakan, memberi dukungan selama posisi setengah berdiri tegak, dan menyesuaikan ayunan untuk membuat tubuh tegak dan bergerak ke depan pada tahap selanjutnya.
SACH foot prosthetic merupakan salah satu bagian pada kaki prosthetic. SACH (Solid Ankle Cushion Heel) foot terdiri dari heel kayu, material yang dimampatkan di sekitar heel, sabuk yang dipasangkan dibawah heel sampai ke bagian jari kaki, palang atau baut yang menjaga kaki ke tulang kering, dan
cushion heel.
Terdapat empat macam tipe ankle joint pada prosthetic, yaitu ankle joint single axis, anklejointdouble axis, anklejointmultiple axis dan anklejoint sistem
energy recovery. Setiap karakteristik ankle joint ini mempunyai fungsi yang berbeda-beda sesuai sistem yang ditanamkan pada masing-masing ankle. Ankle joint sistem double axis mempunyai kemampunan untuk menggerakkan foot dorsi flexion dan plantar flexion. Sistem ini memperbaiki sistem single axis dimana foot
tidak leluasa bergerak layaknya kaki normal. Perkembangan ankle joint multiple
axis memungkinkan kaki untuk bergerak dengan mudah secara plantarflexion, dorsiflexion, pronation atau supination maupun rotasi. energy recovery anklejoint
commit to user
II - 30 Gambar 2.29 SACH foot
Sumber: www.medexinternational.com, 2009
2.9ENERGY STORING KNEE PROSTHETIC
Permasalahan prosthetic pada dasarnya lebih banyak menekankan pada komponen joint dan link sesuai fungsi tubuh. Dalam menghasilkan prosthetic
yang baik agar mampu mengakomodir kondisi lapangan yang di lingkungan sekitar, hal ini tergantung pada kemampuan dalam perancangan pada knee joint
yang menghubungkan antara tubular shank dan socket. Semakin baik perancangan
knee joint semakin baik juga performasi prosthetic yang dihasilkan untuk mampu menjawab kondisi lingkungan sekitar. Adapun prosthetic atau kaki palsu yang memiliki knee joint atau sendi lutut umumnya digunakan oleh para penderita amputasi atas lutut (above-kneeamputee).
Desain above-knee prosthetic konvensional memiliki tingkat kestabilan yang cukup pada saat stance phase. Tetapi pada saat swing phase, kaki hanya mengayun seperti pendulum yang mengayunkan bagian shank dan foot. Kelemahan dari desain ini adalah kecepatan ayunnya sangat rendah, dan tidak dapat beradaptasi dengan perubahan kecepatan, selain itu konsumsi energi yang diperlukan akan bertambah, bilamana pengguna ingin menambah kecepatan langkahnya.
commit to user
II - 31
bidang. Selain itu, teknologi ini memberikan stabilitas dalam berbagi kegiatan olahraga.
Cara kerja energy storing prosthetic berbeda degan cara kerja jenis
prosthetic lain. Konsep energy storing menganalogikan sebagai sebuah peer yang menggantikan fungsi otot hamstring dan quadriceps yang berada di sepanjang
thigh (paha) sampai knee (lutut). Ketika meregang dan mengendur tendon ini menyimpan dan kemudian melepaskan energi potensial elastis. Gerakan peer yang terdapat pada knee prosthetic inilah yang akan mengurangi jumlah kerja yang harus dilakukan otot kaki amputee akibat gaya ayun ketika beraktifitas.
Above-knee prosthetic dengan energy storing didesain dengan
menambahkan komponen mechanical spring pada bagian knee joint atau sering juga disebut Energy Storing Prosthetic Knee (ESPK). Mechanical spring
digunakan untuk menyimpan tenaga pada saat kaki menekuk (flexion) yang diberikan oleh berat tubuh pengguna lalu dilepaskan kembali agar knee joint dapat melakukan extension dengan mudah dan cepat. Desain prosthetic dengan energy storing ini memberikan respon untuk melakukan extension dengan cepat sehingga sangat cocok digunakan pada amputee untuk melakukan aktifitas-aktifitas olahraga ekstrem, misalnya panjat tebing dan bermain ski. Salah satu prosthetic energy storing yang mempunyai desain dengan mechanical spring (coil-over spring) ini yaitu XT9 energy storing prosthetic knee yang diproduksi Symbiotechs
USA.
Gambar 2.30 XT9 Energy storing prosthetic knee
Sumber: Symbiotechs USA, 2006
commit to user
II - 32
bisa disebut gas struts adalah salah satu perangkat energy storing, dimana prinsip kerjanya sama dengan prinsip kerja mechanical spring. Mechanical spring
menyimpan energi dengan memberi tekanan pada material penyusunnya. Gas spring menyimpan energi dengan cara mengkompresi gas nitrogen yang terdapat pada gas spring. Semakin ditekan maka ruang udara dalam gas spring akan
semakin berkurang yang menyebabkan tekanan gas semakin meningkat dan semakin menyimpan banyak energi.
.
Gambar 2.31 Energy storing prosthetic knee
Sumber: Ardian U., 2010
Kelebihan gas spring dibandingkan dengan mechanical spring terdapat pada kecepatan respon, gas spring cenderung lebih smooth dibandingkan dengan
commit to user
II - 33
2.10 PENELITIAN SEBELUMNYA
Boris S . Farber, DSc, PhD dan Jacob S . Jacobson, PhD pada tahun 1995 melakukan kajian mengenai prostetik atas lutut dengan system energy recovery.
Penelitian ini dilakukan pada 32 pasien yang berumur 17-82 tahun. Sebelumnya, pasien mayoritas menggunakan prosthetic dengan uniaxial knee, tiga pasien menggunakan 4-bar linkage, dan enam pasien dipakaikan prosthetic baru dengan mekanisme 4-bar linkage. Hasil penelitian ini didapatkan koefisien energy recovery meningkat 30% dibandingkan dengan AK prosthetic konvensional. Konsumsi energi menurun 35% selama berjalan dengan prosthetic baru.
F. Farahmand, T. Rezaeian, R. Narimani and P. Hejazi Dinan pada tahun 2006 melakukan kajian mengenai kinematik dan analisis dinamik gait cycle pada
amputee atas lutut. Tujuan dari penelitian ini adalah untuk mengukur dan menganalisis variabel dinamik dan kinematik. Karakteristik gait dari lima
transfemoral amputee dan lima subjek normal diukur dengan menggunakan videografi dan force platform. Tubuh subjek dimodelkan pada bidang sagital 2D dibagi menjadi 8 segmen dan dianalisis dengan pendekatan kinematik dan dinamik. Hasilnya, terdapat perbedaan yang signifikan antara subjek amputee dan subjek normal, tetapi perbedaan antara kaki yang utuh dan kaki yang teramputasi tidak terlalu signifikan. Kinematik kaki utuh amputee dan kaki orang normal hampir sama tetapi kaki yang teramputasi mempunyai lebih banyak keterbatasan gerak angular. Momen hip kaki amputee yang utuh lebih besar dari momen kaki normal ( 2,08 Nm/kg dibanding 1,68 Nm/kg) dan momen lututnya juga (1,84Nm/kg dibanding 1,14 Nm/kg). Sedangkan momen hip kaki teramputasi lebih rendah dari kaki normal ( 0,97 Nm/kg dibanding 1,67 Nm/kg)
Yulie Khrisna pada tahun 2006 melakukan kajian mengenai usulan perbaikan pada prosthetic anggota gerak bawah jenis socket quardrilateral
berdasarkan pendekatan biomekanika. Penelitian ini dilakukan terhadap pengguna
commit to user
II - 34
expenditure yang dikeluarkan pengguna untuk gerakan jalan santai masih sangat besar yaitu sebesar 6,559 Kkal/jam/kg atau 129 % lebih besar dari energi
expenditure orang normal 2,86 Kkal/jam/kg. Untuk itu dilakukan penyesuaian gaya dan momen antara segmen kaki normal dengan segmen prosthetic yang sehingga dihasilkan massa ideal untuk prosthetic kaki atas lutut sebesar 3,1187 kg untuk segmen paha, 2,154 Kg untuk segmen betis, dan 0,699 kg untuk segmen telapak kaki.
Putu Primawati dan Agus Susanto pada tahun 2009 melakukan penelitian mengenai kajian biomekanika dan fisiologi pada pengguna prosthetic bawah lutut dengan memperhatikan fungsi ankle joint. Kedua penelitian ini bertujuan untuk mengetahui desain prosthetic bawah lutut endoskeletal terbaik dengan menggunakan hasil pengukuran dari dua perspektif yang berbeda yakni biomekanik dan fisiologis. Desain prosthetic bawah lutut yang dibahas pada kedua penelitian ini ada tiga jenis yaitu prosthetic eksoskeletal, endoskeletal
impor dan endoskeletal model pengembangan, dimana focus perbedaan ketiga
prosthetic tersebut terletak pada bagian ankle joint. Penelitian Putu Primawati menitik beratkan pada aspek fisiologis. Penelitian dilakukan dengan cara mengukur % CVL, energi ekspenditur, kebutuhan kalori, dan VO2 max. Amputee
berjalan normal sejauh 12 meter dan berjalan pada treadmill sejauh 100 meter menggunakan 3 desain prosthetic bergantian dengan tiga kecepatan berbeda (1,2km/jam; 1,6 km/jam; dan 2 km/jam). Sedangkan Agus susanto menitikberatkan pada kajian biomekanika dalam menganalisis jenis prosthetic
commit to user
II - 35
Mamoru Umemura dan Nobuya Yamasaki pada tahun 1998 melakukan penelitian mengenai pengaruh prosthetic atas lutut pada tingkat konsumsi energi. Dalam penelitian tersebut subjeknya adalah 4 orang amputee yang telah menggunakan prosthetic atas lutut. Keempat amputee dipasang 3 jenis prosthetic
commit to user
III - 1
BAB III
METODE PENELITIAN
Metode penelitian berisi tentang tahapan penelitian yang dimulai dari latar belakang sampai dengan kesimpulan. Tahapan yang dilakukan dalam penelitian ini akan dijelaskan pada gambar 3.1.