Oleh
Rudiyana
10808022
1
Pendahuluan
Perancangan
Analisa
Pendahuluan
Perancangan
Analisa
Kesimpulan
Latar Belakang Masalah
Tingginya angka kecelakaan
Tidak ada peringatan jarak jauh terlebih dahulu
5
Maksud dan Tujuan
Maksud
menciptakan suatu alat yang dapat memberikan pesan atau
informasi kepada pengemudi lain yang berada di belakang
kendaraan
Tujuan
alat tersebut dapat digunakan oleh angkutan umum yaitu taksi
Pendahuluan
Perancangan
Analisa
Komponen Penunjang
7
Atmega 8535
Dot Matriks
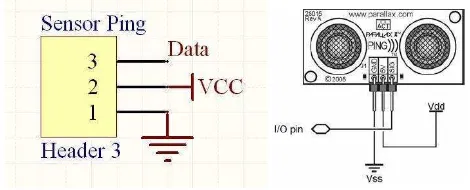
Sensor PING
Diagram Blok Sistem
Diagram blok sistem yang dibuat ditunjukkan pada gambar
di bawah
Keypad
Mikrokontroler
Dot Matriks
9
11
Pendahuluan
Perancangan
Analisa
13
Hasil Pengujian Sensor Ultrasonik
Data pengujian diambil dengan posisi sensor ultrasonik tegak lurus terhadap objek yang
ada didepannya. Tabel berikut menunjukan data hasil pengukuran :
No Jarak (cm)
Status
1
10
Jarak Anda Terlalu Dekat
2
20
Jarak Anda Terlalu Dekat
3
30
Jarak Anda Terlalu Dekat
4
40
Jarak Anda Terlalu Dekat
5
50
Jarak Anda Terlalu Dekat
6
60
Jarak Anda Terlalu Dekat
7
70
Jarak Anda Terlalu Dekat
8
80
Jarak Anda Terlalu Dekat
9
90
Jarak Anda Terlalu Dekat
10
100
Jarak Anda Terlalu Dekat
11
110
Jarak Anda Terlalu Dekat
12
120
Jarak Anda Terlalu Dekat
13
130
Jarak Anda Terlalu Dekat
14
140
Jarak Anda Terlalu Dekat
15
150
Jarak Anda Terlalu Dekat
16
160
Jarak Anda Terlalu Dekat
17
170
Jarak Anda Terlalu Dekat
18
180
Jarak Anda Terlalu Dekat
19
190
Jarak Anda Terlalu Dekat
20
200
Berubah
Pengujian LCD
(Liquid Crystal Display)
dan Dot Matriks
Data pengujian LCD dan dot matriks pada saat keypad ditekan. Tabel berikut
menunjukan data hasil pengujian :
No
Tombol
Keypad
Status
1
*
Masukan Perintah
2
1
ISI
3
2
KOSONG
4
3
Jaga Jarak
5
4
Silakan Mendahului
6
#
OFF
15
Gambar Hasil Pengujian
Tombol *
Tombol 1
Tombol 2
Tombol 3
Tombol 4
hasil dari penekanan tombol 1 yaitu status “ISI”. dari pengujian didapatkan
hasil sebagai berikut :
Hasil Pengujian
No
Jarak (cm)
Data Dari Tombol 1
1
25
ISI
2
50
ISI
3
75
ISI
4
100
ISI
5
125
ISI
6
150
ISI
7
175
ISI
8
200
Berubah
Pendahuluan
Perancangan
Analisa
Kesimpulan
Simpulan
Berdasarkan dari hasil pembuatan dan pengujian yang dilakukan
dapat diambil beberapa kesimpulan sebagai berikut :
Alat yang dibuat telah bekerja dengan cukup baik, hasil keluaran
dari LCD dan dot matriks terbaca cukup jelas walaupun sedikit
ada kedip.
Sensor ultrasonik PING yang digunakan dapat mendeteksi jarak
19
VISUALISASI PESAN DI BELAKANG KENDARAAN
RODA EMPAT MENGGUNAKAN
MIKROKONTROLER
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada Program Studi Diploma Tiga Teknik Komputer
Oleh
Rudiyana 10808022
ABSTRAK
Kebutuhan orang akan alat transportasi di zaman modern ini sangat meningkat, berbagai macam alat transportasi pun banyak jenisnya. Alat transportasi juga terbagi dua yaitu kendaraan umum dan kendaraan pribadi. Kendaraan umum atau dalam istilah angkutan umum sering banyak dijumpai hampir di seluruh negara. Mayoritas di kota-kota besar angkutan umum yang paling banyak yaitu taksi karena lebih nyaman dibandingkan dengan angkutan lainnya. Pada Tugas Akhir ini penulis merancang suatu alat “Visualisasi Pesan
Di Belakang Kendaraan Roda Empat Menggunakan Mikrokontroler”. Alat ini menggunakan keypad untuk masukan manual dan sensor ultrasonik untuk masukan otomatis. Data akan ditampilkan ke LCD dan dot matriks. Pemograman yang digunakan yaitu bascom AVR dan pengolah data mikrokontroler ATmega 8535. Secara umum alat yang dibuat dapat berfungsi dengan baik dan diharapkan pengembangannya lebih lanjut untuk memperbaiki kinerja dari alat yang dibuat.
iv
KATA PENGANTAR
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW., keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya Penulis dapat menyelesaikan tugas akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, Penulis ingin mengucapkan terima kasih kepada :
1. Kedua orang tua yang senantiasa mencurahkan cinta, kasih sayang, perhatian, nasihat, serta motivasi kepada penulis.
2. Sri Nurhayati , M.T., selaku Ketua Jurusan Teknik Komputer.
3. Hidayat, M.T., selaku pembimbing yang telah banyak memberikan arahan, saran, nasihat, motivasi dan bimbingan kepada penulis.
4. Agus Mulyana, M.T., selaku dosen wali.
5. Bapak dan Ibu Dosen di Jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah memberikan ilmu, motivasi dan bantuan kepada penulis.
6. Seluruh staff administrasi jurusan Teknik Komputer, terima kasih atas segala pelayanan akademiknya.
8. Semua orang yang telah membantu penulis dalam mengerjakan tugas akhir ini yang tidak bisa penulis sebutkan satu persatu.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
vi
DAFTAR ISI
ABSTRAK ... iii KATA PENGANTAR ... iv DAFTAR ISI ... vi DAFTAR TABEL ... viii DAFTAR GAMBAR ... ix BAB I PENDAHULUAN ... 1
1.1 Latar Belakang... 1 1.2 Maksud dan Tujuan ... 1 1.3 Batasan Masalah ... 2 1.4 Metodologi Pelaksanaan ... 2 1.5 Sistem Penulisan Laporan ... 3
BAB II LANDASAN TEORI ... 4
2.1 Mikrokontroler ... 4 2.2 Sensor Ultrasonik ... 7 2.3 Dot Matriks ... 10 2.4 Keypad ... 11 2.5 IC 74HC595 ... 12 2.6 LCD (Liquid Crystal Display) ... 14 2.7 Bascom AVR ... 15
BAB III PERANCANGAN DAN SISTEM ... 18
3.3.4 LCD 16x2 ... 25 3.3.5 Mikrokontroler ATmega8535 ... 25 3.3.6 Dot Matriks dan IC 74HC595 ... 27
BAB IV HASIL DAN PEMBAHASAN... 29
4.1 Pengujian ... 29 4.1.1 Pengujian Sensor Ultrasonik ... 29 4.1.2 Pengujian LCD (Liquid Crystal Display) dan Dot Matriks ... 30
BAB V KESIMPULAN DAN SARAN ... 35
5.1 Kesimpulan... 35 5.2 Saran ... 35
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kecelakaan di jalan raya hingga saat ini masih kerap terjadi. Bahkan, angka kecelakaan tetap tinggi kendati rambu-rambu dan sistem pengaturan lalu lintas telah ditingkatkan sekalipun. Sebanyak 90 % lebih itu karena human error, seperti mengantuk, kurang terampil, mabuk atau pengaruh lainnya. Padatnya kendaraan yang ada di jalan tak jarang menyebabkan terjadinya senggolan antar kendaraan. Selain kepadatan jalan, faktor seperti karakteristik jalan juga menyumbang terjadinya kecelakaan. [4]
Jika ditinjau dari permasalahan di atas diperlukan sebuah perangkat yang dapat digunakan untuk memberikan peringatan bahwa jarak terlalu dekat ke pengguna kendaraan lain. Oleh sebab itu penulis akan mencoba membuat
“Visualisasi Pesan Di Belakang Kendaraan Roda Empat Menggunakan
Mikrokontroler”. Dengan alat ini pengemudi dapat memberikan pesan kepada
pengendara lain yang sedang berada di belakang kendaraan.
1.2 Maksud dan Tujuan
2
1.3 Batasan Masalah
Batasan masalah dalam perancangan tugas akhir ini :
1. Perancangan perangkat keras dibatasi pada pembacaan data dari
keypad dan sensor yang di olah di Mikrokontroler ATmega 8535. 2. Led yang digunakan adalah dot matriks5x7.
3. Mikrokontroler yang digunakan adalah ATmega 8535 dengan pemrogramanBascomAVR.
4. Sensor ultrasonik yang digunakan adalah PING.
1.4 Metodologi Pelaksanaan
Metode yang digunakan dalam penyusunan tugas akhir ini adalah sebagai berikut :
1. Metode Studi Literatur
Merupakan suatu metode pengumpulan data dengan cara membaca atau mempelajari buku-buku yang berhubungan dengan tugas akhir.
2. Metode Perancangan
Suatu metode yang dilakukan dengan cara menerapkan teori dan hasil bimbingan untuk merancang suatu sistem perangkat keras dan perangkat lunak.
3. Metode Penelitian
3
1.5 Sistem Penulisan Laporan
Sistematika penulisan laporan Tugas Akhir ini adalah sebagai berikut :
BAB I : PENDAHULUAN
Pada bab ini berisi latar belakang masalah, maksud dan tujuan, batasan masalah, metode penelitian dan sistematika penulisan.
BAB II : LANDASAN TEORI
Pada bab ini berisi tentang teori-teori yang berhubungan dengan tugas akhir yang terdiri dari teori perangkat keras dan perangkat lunak.
BAB III : PERANCANGAN SISTEM
Pada bab ini berisikan tentang perancangan alat yang dibuat untuk tugas akhir ini, meliputi garis besar sistem, perancangan perangkat keras (hardware) dan perancangan perangkat lunak (software) yang digunakan.
BAB IV : PENGUJIAN DAN ANALISA
Pada bab ini memaparkan hasil pengujian berupa data dan analisis program yang telah dibuat serta membandingkannya dengan teori yang didapat.
BAB V :SIMPULAN DAN SARAN
Pada bab ini menjelaskan pembahasan keseluruhan dari tugas akhir dan saran sebagai pengembangan selanjutnya.
DAFTAR PUSTAKA
Berisi referensi yang digunakan dalam pembuatan laporan tugas akhir.
LAMPIRAN
BAB II
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem selain itu dapat juga dijadikan sebagai bahan acuan dalam merencanakan suatu sistem yang akan dibuat. Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya.
2.1 Mikrokontroler
Mikrokontroler merupakan suatu komponen elektronika yang didalamnya terdapat rangkaian mikroprosesor, memori (RAM/ROM) dan I/O, rangkaian tersebut terdapat dalam level chip atau biasa disebut single chip microcomputer. Pada Mikrokontroler sudah terdapat komponen-komponen mikroprosesor dengan bus-bus internal yang saling berhubungan. Komponen-komponen tersebut adalah RAM, ROM, timer, komponen I/O paralel dan serial, dan interrupt kontroller. Adapun keunggulan dari Mikrokontroler adalah adanya sistem interrupt. Sebagai perangkat kontrol penyesuaian, mikrokontroler sering disebut juga untuk menaikkan respon eksternal (interrupt) pada waktu yang nyata. Perangkat tersebut harus melakukan hubungan switching cepat, menunda satu proses ketika adanya respon eksekusi yang lain.[2]
5
adalah ATmega 8535. ATmega 8535 adalah mikrokontroler CMOS 8-bit daya-rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATmega 8535 mempunyai throughput
mendekati 1 MIPS per MHz membuat desain sistem untuk mengoptimalkan konsumsi daya dengan kecepatan proses.[2]
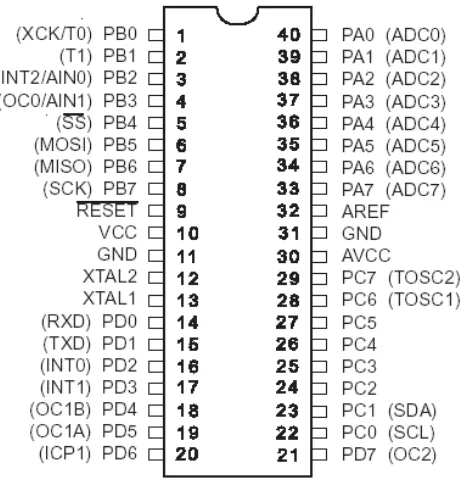
[image:33.595.197.428.306.546.2]AVR ATmega8535 mempunyai 40 kaki, 32 kaki yang digunakan untuk keperluan port paralel setiap port terdiri dari 8 pin, sehingga terdapat 4 port, yaitu port A, port B, port C, port D. seperti gambar dibawah ini :
Gambar 2.1. Kofigurasi Pin AVR ATmega8535
Berikut adalah penjelasan fungsi tiap kaki yang biasa ada pada seri mikrokontroler AVR ATmega8535 yaitu :
1. VCC (power supply)
2. GND (ground)
3. Port A (PA7..PA0)
6
digunakan. Pin - pin Port dapat menyediakan resistor internal pull-up (yang dipilih untuk masing-masing bit). Port A output buffer mempunyai karakteristik gerakan simetris. Ketika pin PA0 ke PA7 digunakan sebagai input dan secara eksternal ditarik rendah, pin–pin akan memungkinkan arus sumber jika resistor
internal pull-up diaktifkan. Pin Port A adalah tri-stated manakala suatu kondisi
reset menjadi aktif, sekalipun waktu habis. 4. Port B (PB7..PB0)
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up
(yang dipilih untuk beberapa bit). Port B output buffer mempunyai karakteristik gerakan simetris. Sebagai input, pin port B yang secara eksternal ditarik rendah akan arus sumber jika resistor pullup diaktifkan. Pin Port B adalah tri-stated pada suatu kondisi tertentu.
5. Port C (PC7..PC0)
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up
(yang dipilih untuk beberapa bit). Port C output buffer mempunyai karakteristik gerakan simetris. Sebagai input, pin port C yang secara eksternal ditarik rendah akan arus sumber jika resistor pullup diaktifkan. Pin Port C adalah tri-stated pada suatu kondisi tertentu.
6. Port D (PD7..PD0)
Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up
7
9. XTAL2 (Output Oscillator) AVCC adalah pin penyedia tegangan untuk port A dan A/D Konverter.
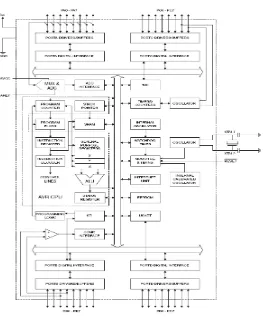
[image:35.595.187.450.186.503.2]10.AREF adalah pin referensi analog untuk A/D konverter.[2]
Gambar 2.2. Blok Diagram ATmega 8535
2.2 Sensor Ultrasonik
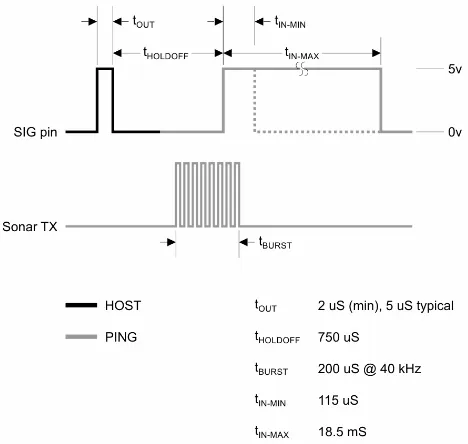
Sensor ultrasonik adalah suatu modul yang berfungsi untuk mengukur jarak, dengan cara memancarkan sinyal ultrasonik. Dengan ukuran yang cukup kecil yaitu (2.1cm x 4.5cm) sensor ini dapat mengukur jarak antara 3cm sampai 300cm. keluaran dari Ping berupa pulsa yang lebarnya mempresentasikan jarak. Lebar pulsanya bervariasi dari 115µs sampai 18.5ms.
Pada dasarnya, Ping terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speker ultrasonic dan sebuah microphone ultrasonic. Sepeker ultrasonic
8
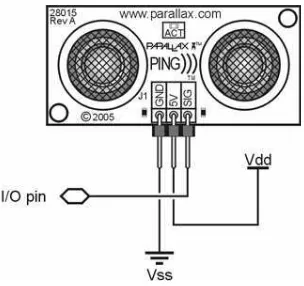
berfungsi untuk mendeteksi pantulan sinyalnya. Pada modul Ping terdapat tiga pin yang digunakan untuk jalur power supply (+5V), ground dan signal. Pin signal
dapat langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun.[3]
Gambar 2.3. Dimensi Sensor Ultrasonik
Sensor Ping ultrasonic ini memiliki spesifikasi sebagai berikut : 1. Power supply DC +5 V
2. Supply Current 30 mA typ; 35 mA max 3. Range 2cm sampai 300cm
4. Burst Frequency 40 kHz untuk 200 μs
9
[image:37.595.196.430.270.492.2]sinyal ultrasonik dengan frekuensi sebesar 40KHz akan dipancarkan selama 200µs. sinyal tersebut akan merambat di udara dengan kecepatan 344.424m/s (1cm setiap 29.034µs). selama menunggu pantulan, sensor ultrasonik akan menghasilkan sebuah pulsa. Pulsa tersebut akan berhenti ketika sinyal pantulan tertangkap oleh Ping. Maka lebar pulsa dapat merepresentasikan jarak sensor ultrasonik dengan objek. Selanjutnya mikrokontroler cukup mengukur lebar pulsa tersebut dan mengkonversinya dalam bentuk jarak.
Gambar 2.5. Cara Kerja Sensor Ultrasonik Dari gambar di atas, cara kerja sensor Ping ultrasonik adalah: 1. Kondisi awal SIG pin adalah logika 0
2. Akan memberikan logika 1 selama 2µs-5µs (t-out) untuk mengaktifkan Ping dan mulai pengukuran
3. Tunggu hingga 750µs (t-holdoff) yaitu saat Ping mulai memancarkan sinyal ultrasonik
4. Lalu merubah SIG pin sebagai input yang akan membaca jarak dengan cara membuat SIG pin berlogika 1, apabila SIG pin berubah kondisi dari logika 1 menjadi logika 0 maka itulah jarak yang terukur
10
Gambar 2.6. Konfigurasi Pin Sensor Ultrasonik
2.3 Dot Matriks
[image:38.595.237.389.111.254.2]11
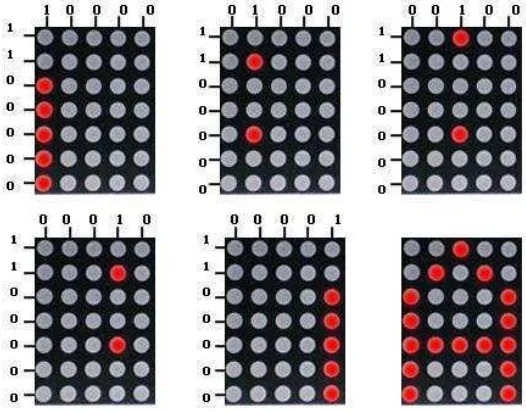
Gambar di bawah ini menunjukkan cara dot matriks menampilkan suatu
[image:39.595.192.455.188.394.2]abjad misalnya huruf “A”, pertama kolom QA diberi logika 1 untuk menyalakan kolom pertama, data 1 tersebut akan bergeser secara serial sampai kolom QE.
Gambar 2.8. Contoh Scanning Dot Matriks
2.4 Keypad
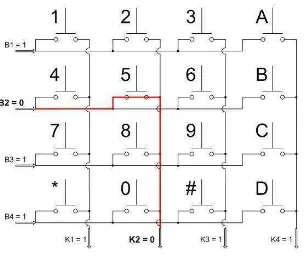
[image:39.595.243.384.605.726.2]Keypad Matriks adalah tombol-tombol yang disusun secara matriks (baris x kolom) sehingga dapat mengurangi penggunaan pin input (masukan). Sebagai contoh, Keypad Matriks 4×4 cukup menggunakan 8 pin untuk 16 tombol. Hal tersebut dimungkinkan karena rangkaian tombol disusun secara horizontal membentuk baris dan secara vertikal membentuk kolom:
12
Proses pengecekkan dari tombol yang dirangkai secara matriks adalah dengan teknik scanning, yaitu proses pengecekkan yang dilakukan dengan cara memberikan umpan-data pada satu bagian dan mengecek feedback (umpan-balik)
[image:40.595.240.393.289.422.2]– nya pada bagian yang lain. Dalam hal ini, pemberian umpan-data dilakukan pada bagian baris dan pengecekkan umpan-balik pada bagian kolom. Pada saat pemberian umpan-data pada satu baris, maka baris yang lain harus dalam kondisi sebaliknya. Tombol yang ditekan dapat diketahui dengan melihat asal data dan di kolom mana data tersebut terdeteksi:
Gambar 2.10. Keypad (1)
Pada contoh di atas, tombol yang ditekan adalah tombol “5”. Seperti
terlihat bahwa B2 bernilai nol, sedangkan B1, B3, dan B4 bernilai satu. Kemudian dengan mengetahui bahwa asal data dari B2, dan umpan-baliknya terdeteksi pada
K2, maka dapat disimpulkan bahwa tombol yang ditekan adalah tombol “5”.[1]
2.5 IC 74HC595
13
Gambar 2.11. IC 74HC595 Tabel 2.1. Konfigurasi Pin
Simbol Pin Penjelasan Q0 - Q7 15, 1 - 7 Paralel data output
GND 8 Ground
Q7' 9 Serial data output
MR 10 Master reset
SHCP 11 Shift register clock input
STCP 12 Storage register clock input
OE 13 Output enable
DS 14 Serial data input
VCC 16 Tegangan 5V
Secara elektronik, register dapat dibangun oleh satu atau beberapa FF. Setiap FF hanya menyimpan data 1 bit. Dalam hal ini FF data merupakan jenis FF yang banyak digunakan dalam menyusun rangkaian register,karena FF data dapat merekam dan menahan data. Berikut ini adalah gambar diagram pada ic 74hc595.
14
Gambar 2.13. Diagram Waktu
Pada gambar 2.13 terlihat bahwa ketika data tinggi masuk dan clock diberi kondisi tinggi data Q0 akan berkondisi 1 kemudian pada clock berikutnya data akan digeser secara berkesinambungan sampai Q7 dan untuk menyimpan data 8 bit secara seri dibutuhkan 8 kali perioda clock.
2.6 LCD (Liquid Crystal Display)
15
Tabel 2.2. Deskripsi LCD 16x2 Sinyal I/O Koneksi dengan AT8535 Penjelasan Vss 1 GND Ground
Vdd 1 VCC Tegangan catu daya +5VDC
VD 1 -1 s/d 5 (dari VR1) Tegangan untuk mengatur kontras LCD
Rs 1 Port D Memilih register internal dari LCD R/W 1 Port D Sinyal Read/Write
E 1 Port D Sinyal untuk enable
DB0.DB7 I/O PD.0 hingga PD.7 (BUS) 8 bit data BUS
Pin data (D0....D7) dapat dihubungkan dengan bus data dari rangkaian mikrokontroler dengan lebar data 8 bit atau 4 bit, sementara pin kontrol terdiri dari Rs, R/W dan E. Pin Rs (Register select) berfungsi sebagai indikator untuk menetukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sementara logika high menunjukan data.
Mikrokontroler akan mengirim suatu karakter atau kata pada input data 8 bit modul LCD, serta mengirim sinyal atau logika high pada pin Rs. Kemudian, mikrokontroler akan mengirim perintah penulisan pada baris ke 1 ataupun baris 2 melalui input data 8 bit dengan memberikan logika high pada pin Rs. Pin R/W berfungsi sebagai instruksi pada LCD, apakah Read atau Write. Ketika R/W diberi logika low berarti penulisan data (write), sedangkan logika high berarti pembacaan data (read). Pin E (Enable) digunakan untuk memegang data, baik masuk atau keluar dari LCD.
2.7 Bascom AVR
Bascom-AVR adalah program basic compiler berbasis windows untuk mikrokontroler keluarga AVR merupakan pemrograman dengan bahasa tingkat
tinggi ” BASIC ” yang dikembangkan dan dikeluarkan oleh MCS elektronika
sehingga dapat dengan mudah dimengerti atau diterjemahkan.
16
berguna untuk melihat, simulasi hasil program yang telah kita buat, sebelum program tersebut kita download ke IC atau ke mikrokontroler. Ketika program bascom-AVR dijalankan dengan mengklik ikon bascom-AVR, maka jendela berikut akan tampil :
Gambar 2.15. Tampilan Jendela Program Bascom AVR
17
Intruksi yang dapat digunakan pada editor Bascom-AVR relatif cukup banyak dan tergantung dari tipe dan jenis AVR yang digunakan. Berikut ini beberapa instruksi-instruksi dasar yang dapat digunakan pada mikrokontroler ATmega 8535.
Tabel 2.3. Beberapa Instruksi Dasar Bascom AVR
Instruksi Keterangan
DO ... LOOP Perulangan
GOSUB Memanggil Prosedur IF ... THEN Percabangan
FOR ... NEXT Perulangan
BAB III
PERANCANGAN SISTEM
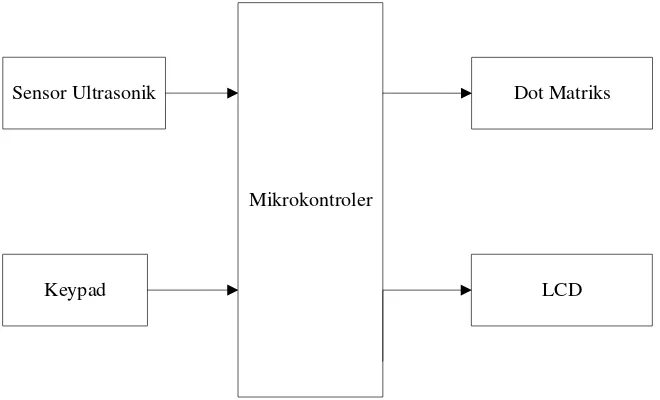
3.1 Diagram Blok Sistem
Adapun diagram blok sistem secara keseluruhan sebagai berikut :
Keypad
Mikrokontroler
Dot Matriks
[image:46.595.147.477.263.463.2]LCD Sensor Ultrasonik
Gambar 3.1. Diagram Blok Sistem Keterangan gambar 3.1.
1. Sensor ultrasonik : Indikator jarak 2. Keypad : Untuk mengirim data
3. Mikrokontroler : Mengolah data yang masuk dari sensor dan keypad 4. Dot matriks : Untuk menampilkan kalimat atau teks berjalan 5. Lcd 16x2 : Menampilkan kalimat di depan pengemudi
19
3.2 Perancangan Sistem
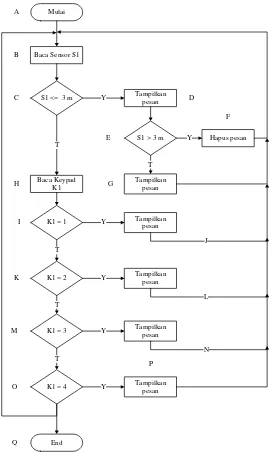
3.2.1 Flowchart Sistem Secara Keseluruhan
Pada bagian perancangan ini, pertama akan membahas tentang sistem kerja berdasarkan flowchart. Dari sini kemudian akan disusun penggunaan komponen-komponennya.
Mulai Baca Sensor S1
S1 <= 3 m
Baca Keypad K1 K1 = 1
Tampilkan pesan Y
S1 > 3 m Y Hapus pesan Tampilkan pesan T T Tampilkan pesan Y T
K1 = 2 Tampilkan pesan Y
K1 = 3 Tampilkan pesan Y
T
[image:47.595.177.449.256.712.2]K1 = 4 Tampilkan pesan Y T End A B C D E F G H I K M O Q P J L N
20
Tabel 3.1. Keterangan Alur Sistem Keseluruhan
No Keterangan
A Memulai program
B Pembacaan data oleh sensor ultrasonik
C Jika sensor kurang dari atau sama dengan 3 meter, jika Y membaca data di D dan jika T baca keypad di H
D Menampilkan pesan otomatis yaitu kalimat “Jarak Anda Terlalu Dekat” pada dot matriks dan lcd
E Jika sensor lebih dari 3 meter, jika Y maka akan lanjut ke F yaitu menghapus pesan dan jika T terus menampilkan pesan
F Menghapus pesan dan kembali menuju B
G Menampilkan pesan sebelumnya
H Pembacaaan keypad
I Jika Tombol keypad no 1 ditekan maka jika Y akan menampilkan pesan di J dan jika T lanjut ke K
J Menampilkan pesan yang sudah tesimpan di mikrokontroler pada dot matriks dan lcd
K Jika Tombol keypad no 2 ditekan maka jika Y akan menampilkan pesan di L dan jika T lanjut ke M
L Menampilkan pesan yang sudah tesimpan di mikrokontroler pada dot matriks dan lcd
M Jika Tombol keypad no 3 ditekan maka jika Y akan menampilkan pesan di N dan jika T lanjut ke O
N Menampilkan pesan yang sudah tesimpan di mikrokontroler pada dot matriks dan lcd
O Jika Tombol keypad no 4 ditekan maka jika Y akan menampilkan pesan di P dan jika T lanjut ke Q atau baca sensor
P Menampilkan pesan yang sudah tersimpan di mikrokontroler pada dot matriks dan lcd
21
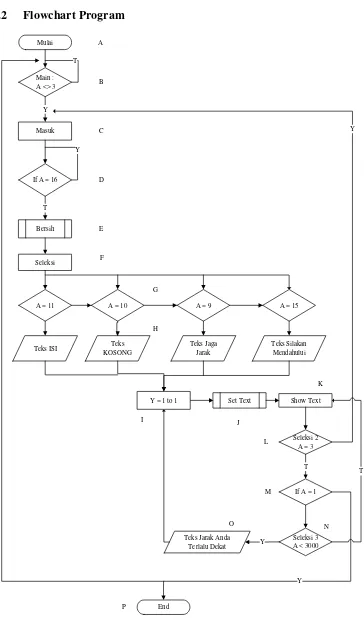
3.2.2 Flowchart Program Mulai
Main : A <> 3
Masuk
If A = 16
Bersih Y
T
Seleksi
A = 11 A = 10 A = 9 A = 15
Teks ISI Teks KOSONG Teks Jaga Jarak Teks Silakan Mendahului T Y
Set Text Show Text Seleksi 2
A = 3
Y
If A = 1
Seleksi 3 A < 3000
T
End
Teks Jarak Anda Terlalu Dekat Y
Y
T Y = 1 to 1
[image:49.595.130.494.106.737.2]A B C D E F G H I J K L M N O P
22
Tabel 3.2. Keterangan Alur Program No Program
A Memulai program
B Jika A tidak sama dengan 3 (tombol * pada keypad) maka jika T go to main, jika Y lanjut ke proses C
C Masuk yaitu awal mula program dimana LCD akan menampilkan
tulisan “Masukan Perintah”
D Jika A sama dengan 16 ( 16 disini maksudnya tidak ada yang menekan tombol di keypad) maka jika Y kembali ke C jika T lanjut ke E
E Prosedur bersih yaitu proses clear text yang akan menonaktifkan kondisi dot matriks dan menghapus teks sebelumnya pada dot matriks F Menyeleksi program yang akan ditampilkan
G Menyeleksi program yang akan ditampilkan H Teks yang akan tampil pada LCD dan dot matriks
I Str text yaitu data hasil dari seleksi akan di hitung panjang datanya J Set text yaitu menyusun teks yang akan ditampilkan
K Show text yaitu menampilkan teks yang telah disiapkan pada LCD dan dot matriks
L Jika A sama dengan 3 (tombol * pada keypad) jika Y go to masuk, jika T maka ke M
M Jika A sama dengan 1 ( tombol # pada keypad) jika Y go to main atau
end, jika T maka ke N
N Jika A kurang dari 3000 maka jika Y maka ke O, jika T maka ke K O Menampilkan teks "Jarak Anda Terlalu Dekat"
23
3.3 Perancangan Perangkat Keras 3.3.1 Catu Daya
[image:51.595.193.428.622.717.2]Berikut ini skematik dari rangkaian catu daya yang dibuat
Gambar 3.4. Skematik Rangkaian Catu Daya
Pada perancangan catu daya memakai transformator CT, keluaran dari
transformator CT tersebut akan disearahkan oleh dua dioda IN4004 dengan keluaran arus sebesar 3 ampere yang menghasilkan keluaran gelombang penuh dan akan di regulasi oleh IC regulator LM7809 sehingga keluaran dari hasil regulasi dari LM7809 akan menghasilkan tegangan sebesar 9 volt.
3.3.2 Sensor Ultrasonik
Sensor ultrasonik merupakan sensor yang bekerja dengan cara memancarkan suatu gelombang dan kemudian menghitung waktu pantulan gelombang tersebut.[3]
24
Memanfaatkan fungsi untuk mengukur jarak dari sensor tersebut ke permukaan benda yang dituju dengan gelombang ultrasoniknya, alat ini diletakkan di belakang kendaraan untuk mengukur jarak suatu kendaraan ke kendaraan yang berada di belakangnya sehingga pada saat jarak terdeteksi sebesar 3 meter, sensor ini akan mengirimkan datanya ke mikrokontroler dan data tersebut akan diolah oleh mikrokontroler yang menghasilkan keluaran yang akan ditampilkan pada dot matriks dan lcd.
3.3.3 Keypad
[image:52.595.244.384.384.504.2]Keypad sering ditemui pada peralatan elektronik, seperti : kalkulator, telepon, dan lain-lain. Keypad terdiri dari sejumlah saklar yang terhubung sebagai baris dan kolom dengan susunan yang ditunjukan pada gambar 3.6. [1]
[image:52.595.245.382.546.714.2]25
3.3.4 LCD 16x2
[image:53.595.198.429.194.401.2]Berikut ini skematik dari rangkaian LCD yang dibuat. LCD tersebut mempunyai tampilan dengan lebar 16 kolom dan 2 baris.
Gambar 3.8. Skematik Rangkaian LCD 16x2
Pada gambar tersebut terlihat bahwa ada beberapa pin yang terhubung dengan mikrokontroler seperti pin ELCD (enable) yaitu pin untuk mengaktifkan LCD dan RSLCD (RS=Register Select) yang berfungsi untuk membedakan antara perintah dan data. Sedangkan pin yang lainya yaitu DTLCD0, DTLCD1, DTLCD2, DTLCD3 yaitu pin untuk jalur data yang dikirimkan mikrokontroler. Selain itu terdapat pula trimpot sebesar 10 K yang berfungsi untuk mengatur kecerahan pada LCD itu sendiri.
3.3.5 Mikrokontroler ATmega8535
26
[image:54.595.189.438.228.469.2]mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 Mhz serta kapabilitas memory flash 8KB, SRAM sebesar 512 byte dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte juga dilengkapi dengan ADC internal dengan fidelitas 10 bit sebanyak 8 channel dan Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.[2]
Gambar 3.9. Skematik Rangkaian ATmega 8535
Adapun fungsi dari port yang digunakan oleh mikrokontroler ATmega 8535 adalah sebagai berikut :
Tabel 3.3. Fungsi Port A, B, C dan D Nama Port Nama Pin Nomor Pin Fungsi
Port A PA.0-PA.7 Pin 0-7 Berfungsi sebagai input dari keypad
[image:54.595.105.512.592.715.2]27
3.3.6 Dot Matriks dan IC 74HC595
Dot matriks merupakan deretan led yang membentuk susunan dengan jumlah kolom dan baris tertentu, sehingga titik-titik yang menyala dapat membentuk suatu karakter angka, huruf, tanda baca, dsb. Dot matriks berikut menggunakan IC shift register 74HC595 untuk mengendalikan nyala led. Jika dot matriks tidak menggunakan IC shift register, maka led bisa menyala bersamaan satu kolom atau satu baris.
28
[image:56.595.166.460.549.722.2]29
BAB IV
HASIL DAN PEMBAHASAN
4.1 Pengujian
Pengujian dan analisis dilakukan dengan tujuan untuk mengetahui apakah sistem yang dibuat berfungsi sesuai dengan yang diharapkan. Terdapat beberapa pengujian yang dilakukan yaitu pengujian sensor ultrasonik, LCD dan dot matriks.
4.1.1 Pengujian Sensor Ultrasonik
[image:57.595.188.437.421.694.2]Data pengujian diambil dengan posisi sensor ultrasonik tegak lurus terhadap objek yang ada didepannya. Tabel berikut menunjukkan data hasil pengukuran :
Tabel 4.1. Hasil Pengukuran Sensor Ultrasonik No Jarak (cm) Status
1 20 Jarak Anda Terlalu Dekat 2 40 Jarak Anda Terlalu Dekat 3 60 Jarak Anda Terlalu Dekat 4 80 Jarak Anda Terlalu Dekat 5 100 Jarak Anda Terlalu Dekat 6 120 Jarak Anda Terlalu Dekat 7 140 Jarak Anda Terlalu Dekat 8 160 Jarak Anda Terlalu Dekat 9 180 Jarak Anda Terlalu Dekat 10 200 Jarak Anda Terlalu Dekat 11 201 Jarak Anda Terlalu Dekat 12 202 Jarak Anda Terlalu Dekat 13 203 Jarak Anda Terlalu Dekat 14 204 Jarak Anda Terlalu Dekat 15 205 Jarak Anda Terlalu Dekat 16 206 Jarak tidak terditeksi 17 207 Jarak tidak terditeksi
30
meter status sudah berubah. Dari hasil analisa kemungkinan sensor utrasonik mengalami pelemahan sinyal sehingga jarak pancarnya kurang dari 3 meter.
4.1.2 Pengujian LCD (Liquid Crystal Display) dan Dot Matriks
[image:58.595.194.433.278.376.2]Dalam pengujian LCD dan dot matriks ini penulis mencoba membandingkan hasil keluaran yang terdapat pada program (software) yang telah dibuat dengan perangkat keras (hardware).
Gambar 4.1. Tampilan LCD Saat Pertama Hardware Dinyalakan
[image:58.595.194.432.472.568.2]Pada saat keypad ditekan tombol 1 maka LCD dan dot matriks akan menampilkan pesan “ISI” pada hardware sebagai berikut :
[image:58.595.194.433.619.706.2]31
[image:59.595.204.419.165.256.2]Pada saat keypad ditekan tombol 2 maka LCD dan dot matriks akan menampilkan pesan “KOSONG” pada hardware sebagai berikut :
[image:59.595.164.461.309.387.2]Gambar 4.4. Tampilan LCD Saat Tombol 2 Ditekan
Gambar 4.5. Tampilan Dot Matriks Saat Tombol 2 Ditekan
Pada saat keypad ditekan tombol 3 maka LCD dan dot matriks akan menampilkan pesan “Jaga Jarak” pada hardware sebagai berikut :
Gambar 4.6. Tampilan LCD Saat Tombol 3 Ditekan
[image:59.595.199.425.488.587.2] [image:59.595.163.463.636.724.2]32
[image:60.595.188.438.166.264.2]Pada saat keypad ditekan tombol 4 maka LCD dan dot matriks akan menampilkan pesan “Silakan Mendahului” pada hardware sebagai berikut :
[image:60.595.160.474.311.406.2]Gambar 4.8. Tampilan LCD Saat Tombol 4 Ditekan
Gambar 4.9. Tampilan Dot Matriks Saat Tombol 4 Ditekan
Pada saat sensor ultrasonik tegak lurus terhadap objek yang ada di depannya maka LCD dan dot matriks akan menampilkan pesan “jarak Anda
Terlalu Dekat” pada hardware sebagai berikut :
[image:60.595.181.446.526.631.2]33
Gambar 4.11. Tampilan Dot Matriks Saat Sensor Ping Terhalang Oleh Objek Dari hasil pengujian LCD dan dot matriks diatas didapatkan hasil sebagai berikut :
Tabel 4.2. Hasil Pengujian LCD dan Dot Matriks No Tombol Keypad Status
1 * Masukan Perintah 2 1 ISI
3 2 KOSONG 4 3 Jaga Jarak 5 4 Silakan Mendahului 6 # OFF
7 Sensor Ping Jarak Anda Terlalu Dekat
Pada tabel 4.3 adalah hasil dari penekanan tombol 1 yaitu status “ISI”. dari pengujian didapatkan hasil sebagai berikut :
Tabel 4.3. Hasil Pengujian Penekanan Tombol 1 No Jarak (cm) Data Dari Tombol 1
1 25 ISI 2 50 ISI 3 75 ISI 4 100 ISI 5 125 ISI 6 150 ISI 7 175 ISI 8 200 Berubah 9 225 Berubah
34
35
BAB V
SIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan dari hasil pembuatan dan pengujian yang dilakukan dapat diambil beberapa kesimpulan sebagai berikut :
1. Alat yang dibuat telah bekerja dengan cukup baik, informasi tertampil pada LCD dan dot matriks terbaca.
2. Sensor ultrasonik PING yang digunakan dapat mendeteksi jarak hanya sampai 2,06 meter yang seharusnya jarak terdeketeksi sampai 3 meter. Dari hasil analisa kemungkinan sensor utrasonik mengalami pelemahan sinyal sehingga jarak pancarnya kurang dari 3 meter. Hasil pengujian dapat dilihat pada tabel 4.1.
5.2 Saran
Hasil percobaan ini masih jauh dari sempurna, maka untuk itu penulis akan memberikan saran diantaranya :
1. Gunakan sensor jarak yang lebih jauh jangkauannya dari yang sudah penulis buat.
DAFTAR PUSTAKA
[1] Instrument, D. (2011). Teori Keypad Matriks 4X4 Dan Cara Penggunaannya. Retrieved Februari 4, 2012, from http://depokinstruments.com/2011/07/27/teori-keypad-matriks-4x4-dan-cara-penggunaannya/
[2] Kurniawan. (2009). Konfigurasi Atmega 8535. Retrieved januari 26, 2012, from innow.files.wordpress.com/2009/04/konfigurasi-pin-at-mega-8535.doc [3] Parallax. (2006). Ultrasonic Distance Sensor. Retrieved Januari 26, 2012,
from http://parallax.com/portals/O/Download/docs/prod/acc/2815-PING-v1.5.pdf
[4] Republika. (2012). Human error 90% penyebab kecelakaan. Retrieved Juli 27, 2012, from http://republika.co.id/berita/nasional/hukum/12/07/26/ m7r8tr1-human-error-90-persen-penyebab-kecelakaan
BIODATA PENULIS
Nama : Rudiyana
Tempat, tanggal lahir : Bandung, 8 Maret 1989 Jenis kelamin : Laki-laki
Agama : Islam
Alamat Tetap : Jl. Margaluyu Baru No.4 RT 02/09 Kec Buah Batu, Bandung 40286 No. telepon : 085624633551
Email : [email protected]
Pendidikan Formal
2008 – 2012 : Universitas Komputer Indonesia, Bandung.
Fakultas Teknik dan Ilmu Komputer, Jurusan Teknik Komputer.
2004 – 2007 : SMK Negeri 8, Bandung 2001 – 2004 : SMP PGRI 7, Bandung