1
PENDAHULUAN
1.1
Latar Belakang
Saat ini perkembangan dunia industri berlangsung dengan sangat cepat,
Dalam suatu perusahaan, sistem penyimpanan produksi sangat berperan penting.
Gudang produk merupakan tempat menyimpan produk, dan tujuan utama dari
sistem pergudangan produk adalah menyimpan barang-barang yang siap untuk
didistribusikan sehingga barang tersebut dapat diterima pelanggan tepat pada
waktu yang diinginkan. Perencanaan gudang barang jadi yang sesuai dengan
kebutuhan merupakan hal yang perlu diperhatikan guna kelancaran produksi, dan
menyimpan hasil produk sementara sebelum pengiriman serta untuk menghindari
kerusakan barang jadi [1].
Permasalahan yang terjadi pada saat ini adalah aliran barang yang masuk ke
pergudangan tidak ditangani dengan baik, seperti penempatannya yang tidak
sesuai dengan ketentuannya dan tentu saja hal ini akan menyulitkan ketika barang
tersebut akan dikeluarkan sehingga, diperlukan waktu pencarian produk dan jarak
tempuh yang tidak tetap setiap kali proses [1]. Hal tersebut disebabkan oleh faktor
kelelahan operator sehingga konsentrasi menurun saat bekerja atau faktor rasa
keengganan operator pergi ke tempat yang seharusnya karena jarak yang cukup
jauh. Faktor permasalahan lain adalah kerusakan saat barang jadi dalam rak
terjatuh yang di akibatkan oleh tumbukan antara forklift dengan rak atau
jadi dalam rak. Penyebab lainnya juga adalah terjepitnya barang saat hendak
dimasukkan ke dalam rak. Hal tersebut terjadi umumnya dikarenakan keterbatasan
pandangan manusia disertai ketidakakuratan dalam menentukan posisi yang benar
dalam memasukkan barang .
Pada penelitian sebelumnya telah dibuat robot pembawa barang mengikuti
garis dengan menggunakan pemrograman bahasa C. Dimana pada robot ini masih
terdapat beberapa kekurangan antara lain masih menggunakan limit switch untuk
memasukkan barang yang harus dikontakkan ke bagian rak agar posisi robot
lurus dengan rak, sehingga dimungkinkan terjadi goncangan pada rak yang akan
mengakibatkan barang dalam rak terjatuh [2]. Kekurangan lain yang dimilikinya
adalah pemilihan tempat barang yang akan disimpan harus terlebih dahulu
memilih pada menu LCD sehingga apabila barang akan di tempatkan ke tempat
yang jauh terlalu lama karena urutannya yang jauh. Berdasarkan permasalahan
tersebut maka perlu dirancang suatu robot industri yang mampu menyimpan
barang sesuai dengan tempat yang diperintahkan user secara otomatis sesuai
dengan jenisnya dan mampu memasukkan barang ke dalam rak dengan tepat
tanpa terjadi tumbukan dengan rak saat robot bergerak.
1.2
Identifikasi Masalah
1. Penempatan barang jyang tidak sesuai dengan ketentuannya sehingga
menyulitkan ketika barang jadi tersebut akan dikeluarkan.
2. Kerusakan barang yang disebabkan oleh terjatuh dan terjepit karena
3. Penggunaan limit switch untuk meluruskan forklif saat hendak
memasukkan barang ke rak yang dimungkinkan akan menimbulkan
goncangan pada rak.
4. Pemilihan tempat dimana barang akan disimpan dipilih pada menu yang di
kendalikan oleh switch dan ditampilkan pada LCD yang apabila hendak
menyimpan barang ke tempat yang jauh urutannya akan memerlukan
waktu pada saat memilihnya pada menu.
5. Sistem otomatisasi pada kinerja robot tanpa adanya perintah atau sesuai
perintah user.
1.3
Rumusan Masalah
Berdasarkan permasalahan yang teridentifikasi di atas, maka pada tugas akhir
ini akan dirancang dan dibuat sistem untuk menyimpan barang pada rak yang
memiliki rumusan masalah sebagai berikut :
1. Bagaimana membuat sistem agar barang jadi di simpan pada tempat yang
seharusnya.
2. Bagaimana membuat sistem agar tidak terjadi kerusakan saat barang
dibawa dan hendak dimasukkan.
3. Bagaimana membuat sistem agar tidak terjadi kontak antara robot dengan
rak saat meluruskan robot dengan rak.
4. Bagaimana membuat sistem untuk memerintah robot tanpa memilih menu
yang ditampilkan di LCD.
5. Bagaimana membuat sistem agar .robot dapat bekerja tanpa perintah user
1.4
Tujuan
Sebagai salah satu alternative untuk menyelesaikan masalah-masalah yang
dijelaskan dalam bagian Rumusan Masalah, maka penelitian ini memiliki
tujuan-tujuan sebagai berikut.
1. Memperoleh sistem yang mampu menyimpan barang pada tempat yang
sesuai.
2. Robot mampu membawa dan menyimpan barang tanpa merusak barang.
3. Robot dapat bergerak lurus dengan rak tanpa terjadi kontak dengan rak
saat akan memasukkan barang.
4. Memperoleh sistem yang sanggup memerintah robot dengan keypad dan
ditampilkan pada LCD.
5. Memperoleh sistem agar robot dapat bekerja tanpa perintah user maupun
sesuai perintah user.
1.5
Batasan Masalah
Beberapa batasan masalah yang didefinisikan oleh penulis sebagai
pembatasan “beban” penelitian adalah sebagai berikut.
1. Jenis barang dibedakan dari warnanya.
2. Robot hanya mendeteksi warna biru, merah, putih dan hitam
3. Selain ke 4 warna tersebut atau tidak ada barang yang di ambil
berkemungkinan dianggap sebagai salah satu ke 4 warna diatas,
4. Penggunaan keypad untuk memasukkan kode rak.
5. Sensor yang digunakan untuk medeteksi rak yang kosong menggunakan
sensor ultrasonik.
7. Ukuran barang sesuai ukuran rak dan berat barang maksimal 150 gram.
1.6 Metode Penelitian
Metoda penelitian yang dilakukan adalah eksperimental dengan
tahapansebagai berikut.
1. Tinjauan Pustaka, merupakan suatu metoda pengumpulan data dengan cara
membaca atau mempelajari buku-buku yang berhubungan dengan masalah
yang menjadi topik dalam tugas akhir.
2. Pengumpulan Data, merupakan metoda untuk mendapatkan data dari topik
yang diambil dengan cara mengajukan pertanyaan secara langsung kepada
pihak-pihak yang berkompeten mengenai hal-hal yang dipelajari selama
pengerjaan tugas akhir. Pertanyaan-pertanyaan ini diajukan kepada dosen
pembimbing di kampus dan sumber lainnya.
3. Pengolahan Data, merupakan proses pengolahan data-data yang didapat
dari hasil pengumpulan data, untuk dijadikan referensi dalam pengerjaan
tugas akhir.
4. Perancangan, yaitu mengaplikasikan teori yang didapat dari studi pustaka
dan dari hasil bimbingan, sehingga tersusun suatu perancangan sistem
untuk bagian perangkat keras (hardware) juga untuk perangkat lunak
(software).
5. Pembuatan, merupakan tahap pengerjaan alat yang sebelumnya telah
dirancang.
6. Pengujian, merupakan metoda untuk mengetahui hasil dari perancangan
7. Analisa, adalah proses pendalaman terhadap alat yang dibuat apakah sudah
berhasil sesuai dengan yang direncanakan atau belum, selanjutnya akan
dilakukan pengujian baik secara teoritis ataupun praktis, dan jika terdapat
kekurangan maka akan dilakukan beberapa perbaikan sistem sehingga
akhirnya penulis dapat mengambil sebuah kesimpulan dari penelitian ini.
1.7 Sistematika Penulisan Laporan
Sistematika penulisan bertujuan untuk menguraikan urutan penulisan
skripsi, susunan dan hubungan antar bab, serta fungsi setiap bab yang ada di
skripsi ini, sehingga pembaca dapat lebih jelas, mengerti, dan terarah. Secara garis
besar sistematika penulisan skripsi dibagi menjadi enam bab pokok, yaitu sebagai
berikut :
BAB I : PENDAHULUAN
Berisi pengantar dari keseluruhan skripsi yang terdiri dari latar belakang
permasalahan, identifikasi masalah, rumusan masalah, tujuan perancangan,
batasan masalah, metoda penelitian, dan sistematika penulisan laporan tugas akhir
ini.
BAB II : LANDASAN TEORI
Berisi teori tentang permasalahan yang dibahas dalam skripsi mulai dari
menjelaskan tentang dasar teori permasalahan dari perangkat sudah ada
sebelumnya dan pengembangan yang dilakukan.
BAB III : PERANCANGAN ALAT
Bab ini berisi tentang perancangan perangkat keras (hardware) maupun
BAB IV : PENGUJIAN DAN ANALISIS
Bab ini berisi tentang hasil pengujian sistem baik dari segi perangkat keras
(hardware) maupun perangkat lunak (software) serta hasil analisanya.
BAB V: PENUTUP
Bab ini berisi rincian kesimpulan serta saran untuk kajian lanjutan dari
8
DASAR TEORI
Bab ini berisi tentang teori mengenai permasalahan yang dibahas dalam
tugas akhir ini secara garis besar dimulai dari definisi Robot , Arduino Mega
2560, Mikrokontroller ATMega 2560, Sensor Ultra Sonic, Infrared, Fotodioda,
Motor DC, Driver Motor L293D, comparator LM339, Keypad, dan Liquid
Crystal Display (LCD).
2.1 Robot
Robot adalah mesin yang terlihat seperti manusia dan melakukan berbagai
tindakan yang kompleks dari manusia seperti berjalan atau berbicara, atau suatu
peralatan yang bekerja secara otomatis. Robot biasanya diprogram untuk
melakukan pekerjaan berulang kali dan memiliki mekanisme yang dipandu oleh
kontrol otomatis. Pada robot terdapat 4 karakteristik yang dimiliki yaitu:
a. memiliki sensor
Sensor merupakan peralatan yang berguna untuk mengukur ataupun merasakan
sesuatu pada lingkungan di luar robot, layaknya indera pada makhluk hidup,
dan memberi laporan hasilnya kepada robot.
b. memiliki sistem kecerdasan (kontrol)
Sistem kecerdasan bekerja dengan memproses data masukan berupa keadaan
ataupun kejadian yang sedang terjadi dari luar lingkungan. Selanjutnya sistem
melakukan suatu tindakan tertentu. Sistem ini secara umum memiliki prinsip
kerja seperti otak pada makhluk hidup.
c. memiliki peralatan mekanik (aktuator)
Peralatan mekanik berfungsi untuk membuat robot dapat melakukan suatu
tindakan tertentu dan berinteraksi dengan lingkungannya.
d. memiliki sumber daya (power)
Sebagaimana pada organisme kehidupan yang membutuhkan makanan untuk
hidup, robot juga memerlukan sumber tenaga untuk menggerakkan komponen
elektrik dan mekanika yang terpasang. Sumber energi pada robot 0 mencakup
penyedia tenaga listrik seperti baterai, dan sistem pengatur transmisi yang
bertugas mengonversi tenaga listrik sesuai kebutuhan setiap komponen [3].
2.2. Mikrokontroller
Mikokontroler adalah suatu chip dimana prosesor, memori dan I/O
terintegrasi menjadi satu kesatuan kontrol sehingga mikrokontroler dapat
dikatakan sebagai komputer mini yang dapat bekerja secara inovatif sesuai
kebutuhan sistem. Dalam aplikasinya mikrokontrolerlah yang langsung
berhubungan dan bertugas untuk mengendalikan suatu robot dan alat yang
terkontrol. Penggunaan mikrokontroler biasanya dipasangkan dengan sebuah
komputer yang dapat saling berkomunikasi dalam mengirimkan data baik untuk
memprogram ulang tugas yang dijalankan oleh mikrokontroler maupun
memberikan nilai pada parameter-parameter untuk pengendalian.
Salah satu mikrokontroler yang ada di pasaran adalah mikrokontroler AVR
yang dibuat oleh perusahaan Atmel. Mikrokontroler AVR menggunakan arsitektur
meningkatkan kemampuan karena dapat mengakses program memori dan data
memori secara bersamaan. Mikrokontroler AVR memiliki fast access register file
dengan 32 register x 8-bit. Dengan 32 register AVR dapat mengeksekusi beberapa instruksi sekali jalan (single cycle). 6 dari 32 register yang ada dapat digunakan sebagai indirect address register pointer 16-bit untuk pengalamatan data space, yang memungkinkan penghitungan alamat yang efisien.
Gambar 2.1. Arsitektur ATMega2560 [14]
2.2.1 Arduino Mega 2560
Arduino mega 2560 adalah papan mikrokontroler berdasarkan
ATmega2560 ( datasheet ). Mikrokontroler Atmega 2560 ini memiliki 54 digital
pin input/ output (yang 15 dapat digunakan sebagai output PWM), 16 input
analog, 4 UART (hardware port serial), osilator kristal 16 MHz, koneksi USB,
diperlukan untuk mendukung mikrokontroler dengan hanya menghubungkannya
ke komputer menggunakan kabel USB atau adaptor AC-DC dan baterai untuk
memulai. ATMega 2560 kompatibel dengan sebagian perisai dirancang untuk
Arduino Duemilanove atau Diecimila.
Gambar 2.2. Arduini Mega 2560 [4]
Spesifikasi Arduino Mega 2560:
Mikrokontroler : ATmega2560
tegangan operasi : 5V
tegangan masukan (disarankan) : 7-12V
tegangan masukan (batas) : 6-20V
digital I / O Pins : 54 (yang 15 memberikan output PWM)
pins Masukan Analog : 16
DC Current per I / O Pin : 40 mA
DC saat ini untuk 3.3V Pin : 50 mA
flash Memory : 256 KB yang 8 KB digunakan bootloader
SRAM : 8 KB
EEPROM : 4 KB
2.2.2. Mikrokontroller Atmega 2560
Mikrokontroler ATMega 2560 merupakan mikrokontroler 8 bit berbasis
arsitektur RISC (Reduced Instruktion Set Computing) dimana set instruksinya
dikurangi baik dari segi ukurannya maupun kompleksitas pengalamatannya. Satu
instruksi biasanya berukuran 16 bit dan sebagian besar di eksekusi dalam 1 siklu.
Atmega 2560 memiliki 86 buah I/O yang masing-masing memiliki fungsi khusus
yang bisa di program selain sebagai pin I/O biasa. Fungsi khusus tersebut
diantaranya adalah sebagai berikut:
a. ADC (Analog Digital Converter)
Atmega 2560 memiliki 16 pin ADC yang dapat digunakan untuk
mengkonversi nilai tegangan yang berupa analog menjadi data berupa bit-bit biner
atau data digital. Nilai tegangan yang dapat dikonversi berkisar antara 0 volt
hingga tegangan pada PIN AREF atau AVCC, dengan persamaan sebagai berikut:
����� � � �� = ����� �� �� �� � �/�� �1023 (2.1)
Dimana 1023 adalah resolusi ADC pada Atmega 2560 yaitu 10 bit.
b. Timer
Atmega 2560 didukung oleh 6 timer dengan detail 2 timer 8 bit dan 4 timer 16
bit. Setiap timer tersebut memiliki pewaktuan masing-masing yang merupakan
hasil prescaler dari clock utama mikrokontroler. Timer-timer ini bisa diset
menjadi mode compare yaitu mode dimana timer bisa menghasilkan sinyal PWM
dengan perioda dan lebar positif pulsa tertentu.
USART (Universal Serial Asyncronous Receiver Transmitter) merupakan
fungsi khusus yang tidak kalah penting yang di miliki atmega2560. Dengan fungsi
ini mikrokontroler dapat berkomunikasi dengan perangkat lain seperti
komputer,ponsel,bahkan dengan mikrokontroler lain melalui jalur serial.
d. Interrupt
Digunakan jika terdapat masukan yang perubahan bitnya perlu di respon
sesaat itu juga.dengan memilih salah satu mode misalnya falling edge pada PIN
kasus ini,maka interrup akan terjadi ketika pin tersebut mengalami perubahan
nilai bit dari1 ke 0. Ada mode lain yang dapat membuat interrupt terjadi, yaitu
mode rising edge yang merupakan kebalika dari mode falling edge dan mode
toggle yang merupan gabungan antara falling edge dan rising edge. Sesaat setelah
interrupt terjadi maka interrupt service routine yang merupakan respon pun akan
segera dieksekusi [13].
Penjelasan konfigurasi pin mikrokontroller ATmega 2560 secara umum
adalah sebagai berikut:
1. VCC merupakan pin yang digunakan sebagai masukan sumber tegangan.
2. GND merupakan pin untuk Ground.
3. XTAL1/ XTAL2, XTAL digunakan sebagai pin external clock.
4. port A, B, C ,D ,E , H, dan L merupakan 8 bit port I/O dengan internal pull-up resistor. Port G merupakan 6 bit port I/O dengan internal pull-up
resistor.
5. Port F (PF0:PF7) dan Port K (PK0:PK7) merupakan pin I/O dan
merupakan pin masukan ADC.
6. AVCC adalah pin masukan untuk tegangan ADC.
7. AREF adalah pin masukan untuk tegangan referensi eksternal ADC [15].
ATmega2560 adalah mikrokontroler yang sangat kompleks di mana tersedia
85 jumlah I/O yang disediakan. Mikrokontroller Atmega 2560 memiliki fitur yang
14 lengkap (ADC internal, EEPROM internal, Timer/Counter, Watchdog Timer,
Gambar 2.4 Diagram Blok Fungsional Atmega2560 [14]
Dari Gambar 2.4 dapat dilihat bahwa Atmega 2560 memiliki bagian sebagai
berikut:
a. Saluran I/O sebanyak 85 buah, yaitu Port A, Port B, Port C, Port D, Port
E, port F, Port G, Port H, Port J, Port K, dan Port L,.
b. ADC 10 bit sebanyak 16 saluran.
c. Tiga buah Timer/Counter dengan kemampuan pembanding
d. CPU yang terdiri atas 32 buah register.
e. Watchdog Timer dengan osilator internal.
g. EPROOM sebesar 4 Kbyte.
h. Memori Flash sebesar 256 Kbyte dengan kemampuan Read While Write.
i. Unit interupsi internal dan eksternal.
j. Port antarmuka SPI.
k. PWM 11 saluran.
l. Tegangan kerja 1,8 sampai 5,5 V.
m. Range suhu -400C sampai 850C.
n. Terdapat 100 pin PDIP.
2.2.3. Memori Mikrokontroller ATMega2560
Pada mikrokontroler AVR terdapat dua ruang memori utama, yaitu memori
data Static Random Access Memory (SRAM) dan memori program In-System Reprogrammable Flash Program Memory (ISP). Selain dua memori utama tersebut, pada ATMega 2560 terdapat memori Electrically Eraserable Programmable Read
-Only Memory (EEPROM).
Application Flash Section
Boot Flash Section 0
0x1FFFF
a. Flash Memory
Mikrokontroller ATMega 2560 memiliki 256 kbyte On-Chip In-System Reprogrammabe Flash Memory yang digunakan untuk menyimpan program dan menyimpan vektor interupsi. Karena semua instruksi pada AVR
mempunyai lebar instruksi 16 atau 32 bit, maka ATMega 2560 memiliki
organisasi memori 128 x 16 bit dengan alamat dari 0 sampai 0x1FFFF. Untuk
keamanan software, ruang flash program memory dibagi menjadi dua bagian, yaitu Boot Program dan Application Program. ATMega 2560 memiliki
Program Counter (PC) dengan lebar 17 bit untuk mengalamati program memory sebesar 16 kbyte.
b. Static Random Access Memory (SRAM)
Static Random Access Memory (SRAM) atau biasa disebut juga data memori yang berfungsi untuk menyimpan data sementara. SRAM merupakan
memori yang termasuk golongan volatile yang berarti data akan hilang ketika tidak mendapat sumber listrik dan SRAM tidak membutuhkan refresh secara periodik dikarenakan SRAM menggunakan teknologi transistor.
c. Electrically Eraserable Programmable Read-Only Memory (EEPROM) EEPROM secara umum digunakan untuk menyimpan data yang tetap.
EEPROM termasuk golongan memori non-volatile yang berarti data tidak akan hilang walaupun EEPROM tersebut kehilangan sumber listrik. Pada
ATMega 2560 sebesar 4 kbyte yang dapat diakses read/write sesuai kebutuhan [14].
2.3. Sensor
Di bawah ini menjelaskan definisi sensor dan beberapa jenis sensor seperti
2.3.1. Definisi Sensor
Sensor merupakan peralatan yang berguna untuk mengukur ataupun
merasakan sesuatu pada lingkungan di luar robot, layaknya indera pada makhluk
hidup [3]. Sensor adalah Jenis transduser yang digunakan untuk mengubah variasi
mekanis, magnetis, panas, sinar dan kimia menjadi tegangan dan arus listrik.
Sensor atau transduser dapat digukanan sebagai bagian dari sistem instrumentasi
(Pengukuran) dan dapat pula digunakan untuk kepentingan pengendalian
(kontrol). Maka dalam memilih peralatan sensor dan transduser yang tepat dan
sesuai dengan sistem yang akan disensor maka perlu diperhatikan persyaratan
umum sensor berikut ini.
1. Linearitas
Linier dalam hal ini dimaksudkan hubungan antara besaran input yang
dideteksi menghasilkan besaran output dengan hubungan berbanding lurus dan
dapat digambarkan secara gravik membentuk garis lurus. Pada gambar 2.5 (a)
memperlihatkan tanggapan linear sensor suhu dan pada gambar 2.5 (b)
memperlihatkan tanggapan yang tidak linear.
(a) (b)
Gambar 2.6 Tanggapan pada sensor [6]
2. Sensitivitas
Perbandingan antara sinyal keluaran atau respon transduser terhadap perubahan
kepekaan sensor terhadap kuantitas yang diukur. Apabila tanggapannya linier,
maka sensitivitasnya juga akan sama untuk jangkauan pengukuran keseluruhan.
Untuk sensor dengan tanggapan seperti pada gambar 2.6 (b) akan lebih peka pada
temperatur yang tinggi dari pada temperatur yang rendah.
3. Tanggapan waktu
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya
terhadap perubahan masukan. Pada gambar 2.7 grafik instrument dengan
masukkan step input.
Gambar 2.7 Grafik Tanggapan Waktu [6]
Pada gambar 2.6 garis hijau menunjukan respon yang paling cepat dibanding garis
ungu dan hitam, sedangkan garis hitam menunjukan respon yang paling lambat
dibandingkan dengan garis hijau dan ungu.
4. Jangkauan dan ukuran fisik
Salah satu kriteria untuk memilih sensor adalah kesanggupan mengindera dan
ukuran fisik dari sensor sesuai dengan yang diperlukan [6].
2.3.2. Sensor Ultrasonik
Sensor ultrasonik adalah sensor pengukur jarak berbasis gelombang
ultrasonik. Gelombang ultrasonik merupakan gelombang akustik yang memiliki
Gambar 2.8 Bentuk Fisik Sensor Ultrasonik [15]
Sistem kerja sensor ini menembakkan gelombang ke obyek dan menunggu
pantulannya maka waktu tempuhnya dua kali, sehingga untuk mengetahui jarak
sebenarnya harus dibagi dua, setengah adalah waktu gelombang ditembakkan dan
mengenai obyek, setengahnya adalah pantulan gelombang dari obyek yang
kembali ke receiver.
Gambar 2.9 Seistem Kerja Sensor Ultrasinic HC-SR04 [5]
Secara matematis besarnya jarak dapat dihitung menggunakan persamaan di
bawah ini [5].
= �.
2 (2.2)
Dimana:
s : jarak dalam satuan meter (m)
v : kecepatan suara
Spesifikasi dari sensor ultrasonic HC-S04 adalah sebagai berikut [15]:
· jangkauan deteksi: 2cm sampai kisaran 400 -500cm
· sudut deteksi terbaik adalah 15 derajat
· tegangan kerja 5V DC
· resolusi 1cm
· frekuensi Ultrasonik 40 kHz
· dapat dihubungkan langsung ke kaki mikrokontroler
2.3.3. Infrared
Infrared adalah dioda solid state yang terbuat dari bahan galium arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias maju. Bila
diberi bias naju elektron dari daerah-n akan menutup lubang elektron yang ada
didaerah-p. Selama proses rekombinasi, energi dipancarkan keluar dari
permukaan p dan n dalam bentuk foton-foton yang dihasilkan ini ada yang diserap
lagi dan ada yang meninggalkan permukaan dalam bentuk energi. Sinar
inframerah meliputi daerah frekuensi antara 1011 Hz sampai 1014 Hz dan
mempunyai daerah panjang gelombang 10-14 sampai 10-1 cm. Hubungan antara
energi foton yang dipancarkan dengan Eg LED ditunjukkan pada persamaan (2.3)
dan (2.4) [8]:
= �. (2.3)
atau
= . (2.4)
Dimana:
Eg : energi foton
h : potensial ionisasi (4,136.10-15 eV)
c : kecepatan cahaya (3.108 m/s)
� : panjang gelombang cahaya (m)
2.3.4. Photodioda
Photodioda adalah jenis dioda yang berfungsi untuk mendeteksi cahaya.
Photodioda merupakan sensor cahaya semikonduktor yang dapat merubah energi
cahaya menjadi besaran listrik. Disebut photodioda karena ada dua kaki (dioda)
dan arus mengalir padanya dengan mudah dalam satu arah dan sulit dalam arah
yang lain. Kedua aliran arus pada arah yang sulit dapat berubah dengan adanya
perubahan intensitas cahaya. Pada gambar 2.11 memperlihatkan aliran arus yang
mudah (bias maju) dan arah aliran sukar (bias mundur) [6].
Gambar 2.11 Sifat Photodioda [6]
Hal yang penting untuk diperhatikan ketika photodioda dibias terbalik arus
karakteristik seperti ini sangat penting untuk diperhatikan. Karakteristiknya dapat
ditunjukkan seperti pada gambar 2.12.
Gambar 2.12 Karakteristik Photodioda [6]
Arus bias terbalik sangatlah kecil dan berubah sesuai dengan tingkat pencahayaan,
dari sekitar 1 nano ampere di tempat gelap (nA atau 10-9A) sampai sekitar 1
miliamp (mA atau 10-3A) di tempat terang. Untuk penguat khusus photodioda
dapat di lihat pada gambar 2.15.
Gambar 2.13 Penguat Photodioda [6]
Vout = I.R (2.5)
Dimana:
I : arus bias mundur fotodioda
5. Light Dependent Resistor (LDR)
Light dependent resistor (LDR) adalah alat yang digunakan untuk
mengubah besaran cahaya menjadi besaran listrik. Light dependent resistor (LDR)
merupakan suatu element yang konduktivitasnya berubah-ubah tergantung dari
intensitas cahaya yang diterima permukaan element tersebut, akan tetapi keluaran
yang ada pada sensor tidak sama dengan apa yang diketahui dari sebuah teori dan
hasil simulasi.
Gambar 2.14 Bentuk Sensor LDR [17]
Prinsip kerja sensor LDR yaitu jika cahaya yang mengenai permukaan
LDR maka nilai resitansinya akan mengecil, sebaliknya jika permukaan LDR
sedikit mengenai cahaya maka resistansinya akan semakin besar. Berikut adalah
grafik hubungan antara resistansi LDR dengan intensitas cahaya.
Gambar 2.15 Grafik hubungan Resistansi LDR dengan Intensitas Cahaya
6. Limtch Switch
Limit switch adalah sensor peraba yang bersifat mekanis dan mendeteksi sesuatu setelah terjadi kontak fisik. Penggunaan sensor ini biasanya digunakan
untuk membatasi gerakan maksimum sebuah mekanik. Sensor ini juga seringkali
digunakan untuk sensor cadangan bilamana sensor yang lain tidak berfungsi.
Gambar 2.16 Limit Switch [2]
2.4. Motor DC
Motor DC adalah sebuah aktuator yang mengubah besaran listrik menjadi
sistem gerak mekanis. Motor DC beroprasi dengan prinsip-prinsip kemagnetan
dasar, polaritas arus yang mengalir melalui kawat lilitan akan mementukan arah
putaran motor dan nilai arus yang mengalir melalui kawat lilitan akan
memnentukan nilai torsi dan kecepatan putaran motor. Kawat lilitan medan pada
motor dc disebut stator (bagian yang tidak berputar) dan kawat lilitan jangkar
disebut rotor (bagian yang berputar). Motor DC memiliki 3 bagian atau
komponen utama untuk dapat berputar sebagai berikut:
a. kutub medan
Motor DC sederhana memiliki dua kutub medan, kutub utara dan kutub
selatan, interaksi dua kutub medan tersebut akan menyebabkan putaran pada
motor DC. Pada motor DC terdapat kutub medan yang statis dan dinamis, jika
terjadi interaksi dua kutub medan tersebut maka akan menggerakan bearing
b. rotor
Rotor yang berbentuk silinder dihubungkan ke as penggerak untuk
menggerakan beban. Bila arus masuk menuju rotor (bagian motor yang
bergerak) maka arus akan menjadi elektromagnet. Untuk kasus motor DC
yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh
kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi.
c. Commutator
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah
untuk membalikan arah arus listrik dalam rotor dan membatu transmisi arus
antara dinamo dan sumber daya [7].
Gambar 2.17. Konstruksi Motor DC [7]
2.5.Driver Motor L293D
L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat
dikendalikan dengan rangkaian TTL maupun mikrokontroler. Dalam 1 unit chip
IC L293D terdiri dari 2 buah drivermotor DC yang berdiri sendiri sendiri dengan
kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat
digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi
pin driver motor DC IC l293D adalah sebagai berikut.
Gambar 2.19. Konstruksi IC L293D [9]
Fungsi Pin Driver Motor DC IC L293D sebagai berikut:
· Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima
perintah untuk menggerakan motor DC.
· Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
· Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver
yang dihubungkan ke motor DC
· Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor
DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol
dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang
· Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND
ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin
kecil [9].
2.6.Komparator
Komparator adalah op-amp yang diatur dalam kondisi open loop seperti pada
gambar 2.16 Berfungsi untuk membandingkan Vin dengan Vref dengan Vo yang
bernilai sama dengan VDD dan VEE [11].
� = � �+− �− (2.10)
Gambar 2.20. Dasar Komparator [11]
2.6.1. Karakteristik Komparator
Komparator memiliki 2 karakteristik yaitu:
1. komparator non-inverting .
Untuk rangkaian pada gambar 2.16. , dimana �+=�� dan �−= �� . Untuk
�� = 0, karakteristik perpindahan tegangan � melawan �� seperti yang di
tunjukan pada gambar 2.17.
Ketika �� > ��+ , �0 =� dan untuk �� < ��− = � Nilai ��+ dan ��−
berbanding terbalik dengan gain A open loop.
��+= �
� (2.11)
��−= �� (2.12)
Operasi di daerah linier dibatasi untuk ��− <�� <��+. Di luar dari range
op-amp adalah saturasi. Untuk �� > 0, karakteristik tegangan � melawan ��
seperti yang ditunjukan pada gambar2.18.
Gambar 2.22. Karakteristik transfer tegangan komparator non-inverting dengan
referensi tidak nol [11]
Disini karakteristik digeser ke kanan oleh �� . Range dari �� untuk daerah
operasi linier tetap sama dan tegangan saturasi tetap sama dengan � dan � .
Sehubung besar nilai A, range tegangan [��−,��−] sangat kecil dan dengan
demikian untuk memperbaikinya di asumsikan komparator dengan open loop
tidak terbatas yang sesuai dengan nilai nol pada daerah linier. Oleh karena itu,
plot perpindahan tengangan pada gambar 2.18 akan menjadi seperti yang di
tunjukan pada gambar 2.19. Disini dapat dilihat transisi dari satu daerah saturasi
Gambar2.23. Komparator Iideal [11]
Dimana:
VDD : tegangan positif
VEE : tegangan negatif (ground)
��+ : titik puncak positif
��− : titik puncak negatif
2. Karakteristik komparator inverting
Untuk rangkaian dapat dilihat pada gambar 2.20, dimana �+=�� dan
�−= �� .
Gambar 2.24. Komparator Inverting [11]
Karena � = �( �� − �� ) maka karateristik transfer tegangan yang sesuai di
tunjukan pada gambar 2.21.
Pengaturan lain untuk komparator non-inverting dapat di lihat pada
gambar 2.22. (a) dan untuk komparator inverting dapat dilihat pada gambar 2.23.
(b). Untuk tegangan output dapat ditentukan dengan persamaan (2.13) berikut ini
[12].
� = � �+− �− (2.13)
Tegangan �+ pada komparator non-invering dapat ditemukan menggunakan
persamaan (2.14)
�+=�� �1�2+�2+ �� �1�1+�2 (2.14)
Dan untuk Tegangan �− , jika �−= 0 komparator akan transisi ketika �+melintasi
nol. Hal ini terjadi ketika
0 = �� ( )�2 +�� �1 (2.15)
Dan dengan demikian transisi tegangan
�� ( ) =− �1
�2�� (2.16)
Persamaan di atas perlu di sesuaikan dahulu untuk komparator inverting dengan
melihat gambar 2.22. (a) dan gambar 2.23. (a). �+> 0 sesuai dengan �� > �� ( )
dan output positif (��). Demikian pula �+< 0 sesuai dengan �� < �� ( ) dan
output menjadi negatif (��). Untuk kurva transfer tegangan non-inverting
ditunjukan pada gambar 2.22. (b) dan untuk kurva transfer tegangan inverting
ditunjukan pada gambar 2.23. (b) [11].
Gambar 2.27 Rangkaian komparator inverting [11]
2.6.2. IC LM339
IC LM339 adalah IC komparator yang berfungsi untuk meng-compare
(membandingkan). Pada satu buah IC LM 339 terdapat 4 buah 0p-amp
komparator dimana satu buah komparator terdapat dua buah input yaitu, Vin dan
Vref. Pada dasarnya jika Vin > Vref maka Vo berlogika 1 atau tegangannya sama
dengan Vcc dan jika Vin < Vref maka Vo berlogika 0 atau 0V [10].
Gamba 2.28 IC Comparator LM339 [10]
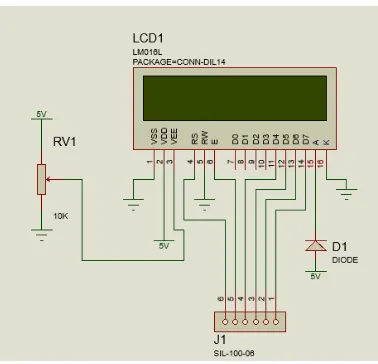
2.7.Liquid Crystal Display(LCD)
LCD (Liquid Cristal Display) adalah salah satu komponen elektronika yang
berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik.
beserta rangkaian pendukungnya termasuk ROM dll. LCD mempunyai pin data,
kontrol catu daya, dan pengatur kontras tampilan.
Gambar 2.29 LCD 16x2 [2]
LCD memiliki data sheet sebagai berikut:
PIN 1 : Vss - GND
PIN 2 : VDD - +5V VCC
PIN 3 : Vo - Contrast Adjustment
PIN 4 : RS - Reset PIN 5: R/W - Read/Write ("0" = Write to LCD module "1"
= Read from LCD module)
PIN 6 : E - Enable Signal
PIN 7 : DB0 Data 0
PIN 8 : DB1 Data 1
PIN 9 : DB2 Data 2
PIN 10 : DB3 Data 3
PIN 11 : DB4 Data 4
PIN 12 : DB5 Data 5
PIN 13 : DB6 Data 6
PIN 14 : DB7 Data 7
PIN 15 : Backlight +5V VCC
PIN 16 : Backlight GND [2].
2.8.Keypad 4x4
Keypad 4x4 adalah keypad matriks yang terdiri dari 4 kolom dan 4 baris.
Penggunaan keypad matriks memungkinkan jumlah input sampai 2 kali lipat dari
sesungguhnya sehingga memiliki alokasi 8 port input mikrokontroler.
mencapai 16 input hanya menggunakan 8 bit mikrokontroler. Caranya dengan
membagi port tersebut menjadi 4 baris dan 4 kolom seperti pada gambar 2.30.
Gambar 2.30 keypad matriks 4x4 [12]
Untuk contoh penggunaanya port kolom dijadikan sebagai input tegangan
kemudian port baris digunakan menscan tombol mana saja yang di tekan. Ketika
tombil 13 di tekan maka arus mengalir dari kolom 1 ke baris 4 dengan bengitu
mikrokontroler dapat mengetahui tombol tersebut aktif sedangkan tombol lain
35
PERANCANGAN ALAT
Perancangan dan realisasi sistem merupakan bagian yang terpenting dari
seluruh pembuatan tugas akhir ini. Perancangan yang baik dan dilakukan secara
sistematik akan memberikan kemudahan dalam proses pembuatan alat serta
mempermudah dalam proses analisis dari alat yang dirancang.
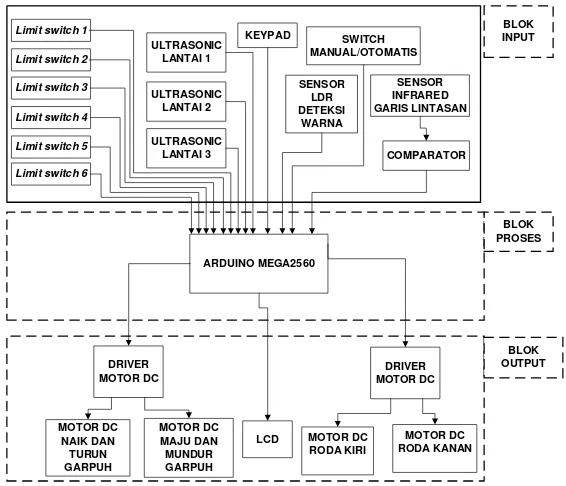
3.1 Perancangan Sistem
Pada perancangan sistem prototype robot forklift penyimpan baran otomatis
pada rak 3 lantai ini, secara umum terdapat tiga bagian utama yaitu bagian
masukan (input), pemroses (process), dan keluaran (output). Tiga bagian inilah
yang menjadi dasar dari kinerja prototype robot forklift penyimpan barang
otomatis pada rak 3 lantai.
ARDUINO MEGA2560
Gambar 3.1 Perancangan Prototype Robot forklift Penyimpan Barang Otomatis
Secara umum, cara kerja dari prototype robot forklift yang akan dirancang
dalam tugas akhir ini adalah ketika switch pada mode manual, robot akan
mengambil barang yang ada di depannya kemudian menunggu sampai operator
memasukan kode rak tempat barang tersebut disimpan. Operator akan memasukan
kode rak dengan menekan keypad yang ditampilkan pada LCD. Apabila kode rak
telah dimasukan, maka robot akan bergerak mengikuti garis hitam ke tempat
dimana barang akan disimpan dan menyimpan barang yang dibawanya pada rak.
Setelah barang tersimpan, robot akan kembali ke tempat asal untuk mengambil
barang kembali dan menunggu kode rak dimasukan. Ketika switch pada mode
otomatis, robot akan mengambil barang dan mendeteksi warna barang, kemudian
robot akan bergerak ke arah rak yang telah ditentukan untuk warna tersebut
dengan mengikuti garis hitam. Apabila terdeteksi rak kosong maka robot akan
menyimpan barang pada rak yang kosong tersebut dan kembali lagi ke tempat asal
untuk mengambil barang kembali dan mendeteksi warna barang kemudian
menyimpan pada rak kosong sesuai warna yang telah ditentukan, dan begitu
seterusnya.
Berikut uraian singkat fungsi dari masing-masing bagian utama blok diagram
Sistem sistem prototype robot forklift penyimpan barang otomatis pada rak 3
lantai ini.
1. Masukan (Input)
Pada bagian masukan (input) empat macam perangkat yang berfungsi untuk
memberikan masukan bagi mikrokontroler sesuai dengan fungsinya
a. Sensor Ultrasonik
Sensor ultrasonik merupakan sensor yang dapat digunakan untuk
sensor jarak. Prototype robot forklift yang dirancang dalam tugas
akhir ini memiliki tiga buah sensor ultra sonik dimana sensor ultra
sonik lantai 1 digunakan untuk medeteksi rak kosong atau tidak pada
rak lantai 1, sensor ultrasoik lantai 2 digunakan untuk mendeteksi rak
kosong atau tidak pada rak lantai 2, dan ultrasonik lantai 3 digunakan
untuk mendeteksi rak kosong atau tidak pada rak lantai 3.
b. Keypad
Dalam perancangan Prototype robot forklift pada tugas akhir ini,
digunakan keypad 4x4 yang berfungsi sebagai fasilitas bagi operator
untuk memberikan perintah pada robot menyimpan barang ke tempat
yang di kendaki operator.
c. Switch Manual/ Otomatis
Pada perancangan Prototype robot forklift ini switch digunkan intuk
memilih mode robot. Apabila robot pada mode manual maka sebelum
robot menyimpan barang akan menunggu terlebih dahulu perintah dari
operator, dan apabila robot pada mode otomatis robot akan
mengambil barang kemudian menyimpan barang sesuai dengan warna
pada tempat yang telah ditentukan.
d. Infrared dan Photodioda
Infrared pada dasarnya sama dengan light emitting diode (LED)
namun infrared ini cahaya yang dipancarkan tidak terlihat oleh mata
besaran cahaya menjadi besaran listrik. Pada Prototype robot forklift
yang dirancang dalam tugas akhir ini infrared berfungsi sebagai
transmitter dan photodioda sebagai receiver, dimana infrared akan
memancarkan cahaya infra-merah dan dipantulkan oleh lantai atau
benda dihadapannya ke arah receiver atau photodioa kemudian cahaya
yang di tangkap oleh photodioda akan diubah menjadi bearan listrik.
Infrared dan photodioda digunakan untuk sensor garis hitam sebagai jalur robot bergerak. Keluaran dari photodioda akan di bandingkan
oleh komparator untuk mendapatkan keluaran digital dan hasil
perbandingan akan di hubungkan dengan pin input pada
mikrokontroler.
e. Light Dependent Resistor (LDR)
Light dependent resistor (LDR) adalah alat yang digunakan untuk
mengubah besaran cahaya menjadi besaran listrik. Pada prototype
robot forklift yang dirancang dalam tugas akhir ini LDR digunakan
sebagai pendeteksi warna barang pada mode otomatis yang terdiri
dari 4 warna yaitu, biru, merah, hitam dan putih.
f. Limit Switch
Limit switch adalah sensor peraba yang bersifat mekanis dan
mendeteksi sesuatu setelah terjadi kontak fisik. Pada prototype robot
forklift yang dirancang dalam tugas akhir ini limit switch 1 berfungsi sebagai batas garpu paling bawah pada posisi siap mengambil barang,
limit switch 2 berfungsi sebagai batas garpu pada posisi penyimpanan
posisi penyimpanan barang lantai 2, limit switch 4 berfungsi sebagai
batas garpu pada posisi penyimpanan barang lantai 3, limit switch 5
berfungsi sebagai batas saat garpu maju kedepan dan limit switch 6
berfungsi sebagai batas saat garpuh mundur kebelakang.
2. Proses
Papan mikrokontroler arduino mega 2560 digunakan sebagai
perangkat kontrol utama perancangan Prototype robot forklift pada tugas
akhir ini. Mikrokontroler memproses setiap masukan dan mengeksekusi
perangkat output sesuai dengan intriksi program yang diatur oleh
perancang/pemrogram.
3. Keluaran (Output)
Bagian keluaran atau output adalah bagian yang merupakan hasil
eksekusi perangkat dan bertindak sebagai hasil dari kinerja perangkat
sesuai dengan keinginan perancang. Terdapat dua macam jenis perangkat
keluaran yang digunakan pada perancangan Prototype robot forklift
penyimpan barang otomatis pada rak 3 lantai pada tugas akhir ini,
diantaranya :
a. Liquid Crystal Display (LCD)
Perangkat penampil yang digunakan dalam perancangan
perancangan Prototype robot forklift ini adalah Liquid Crystal Display
(LCD) 16x2. LCD ini berfungsi untuk menampilkan karakter yang
operator tekan pada keypad dan penampil mode robot pada keadaan
mode manual atau otomatis.
Motor DC adalah sebuah aktuator yang mengubah besaran listrik
menjadi sistem gerak mekanik. Pada perancangan Prototype robot
forklift ini terdapat empat buah motor DC dimana motor DC kiri dan
kanan berfungsi untuk mengerakan robot maju, mundur, belok kiri,
dan belok kanan, motor DC naik dan turun garpu berfungsi untuk
menggerakan garpu ke atas dan ke bawah, dan motor maju dan
mundur garpu berfungsi untuk mengerakan garpu ke depan dan ke
belakang.
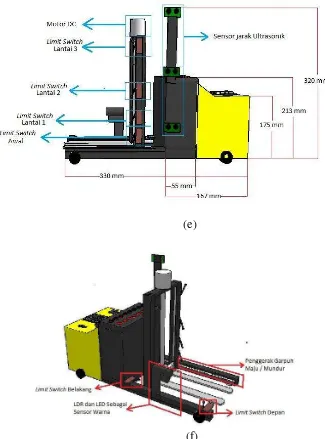
3.2 Perancangan Mekanik Pada Prototype Robot Forklift
Dalam perancangan Prototype robot forklift pada tugas akhir ini, robot
dirancang menyerupai forklift yang umum digunakan pada gudang-gudang
industri, yang nyatanya forklift model ini memiliki ukuran lebih kecil dengan
jangkauan yang sama. Pada robot forklift ini, dibagian bawah robot terdapat
infrared dan photodioda untuk mendeteksi garis hitam sebagai jalur robot, serta
motor penggerak roda kiri, penggerak roda kanan, dan penggerak
majumundurnya garpuh. Pada bagian atas belakang robot terdapat keypad, LCD,
LED sebagai indikator komparator, dan trimpot untuk mengubah – ubah tegangan
input pada komparator. Pada bagian samping kiri robot terdapat tiga buah sensor
jarak ultrasonik. Pada bagian depan tiang garpuh terdapat Light Dependent
Resistor (LDR). Pada bagian atas tiang garpu terdapat motor untuk menggerakan garpu naik dan turun. Pada bagian dalam robot terdapat beberapa sistem kontrol
(a) (b)
(e)
(f)
Gambar 3.2 Bentuk Mekanik Pada Robot Forklift
Kerterangan:
Gambar 3.2 (a) : dimensi atas dan tata letak komponen bagian atas
Gambar 3.2 (b) : dimensi bawah dan tata letak komponen bagian bawah
Gambar 3.2 (c) : robot tampak belakang dan tata letak komponen
Gambar 3.2 (d) : dimensi depan dan penggerak naik turun garpu
Gambar 3.2 (e) : dimensi samping dan tata letak komponen bagian
bagian samping
Gambar 3.2 (f) : penggerak maju mundur garpu
Prototype robot forklift ini dirancang menggunakan bahan pelastik pada bodi bagian bawah belakang dengan ukuran panjang 167 mm dan lebar 140 mm, bodi
bagian atas belakang terbuat dari bahan triplek agar lebih ringan dan
mempermudah untuk peletakan komponen. Bagian rell garpu maju mundur
terbuat dari bahan siku almunium agar lebih ringan dan kuat dengan panjang 163
mm dan jarak antara rell kiri dan kana bagian dalam 103 mm, bagian luar 140
mm. Rell garpu naik turun terbuat dari bahan sikun almunium agar lebih ringan
dan kuat dengan ukuran tinggi 370 mm dan jarak antara rell kiri dan kanan
bagian dalam 68 mm, bagian luar 100 mm.
Garpu tebuat dari bahan siku almunium agar lebih ringan dan tidak bengkok
saat mengangkat barang dengan ukuran panjang 165 mm dan lebar 20 mm, jarak
antara garpu kiri dan kanan 50 mm. Bagian penggerak naik turun garpu dan maju
mundur garpu menggunakan baud panjang agar ketika garpu naik ke atas tidak
turun kembali saat motor penggerak berhenti berputar. Untuk peletakan sensor
ultrasonik dibuat dari bahan triplek agar lebih ringan dan stabil saat robot
bergerak. Ruang peletakan PCB berada pada bagian dalam robot dimana bagian
belakang robot dapat dibuka, ini berujuan untuk mempermudah dalam mengganti
3.3 Perancangan Rak
Pada tugas akhir ini perancangan rak tempat barang akan disimpan terbuat
dari bahan kayu agar lebih mudah membuatnya dan lebih hemat biaya. Rak
memiliki 3 baris dan 3 kolom yang artinya pada satu rak mampu menampung 9
barang dimana pada perancangan rak ini terdapat 4 buah rak dengan tinggi
masing-masing rak 400 mm, panjang 780 mm, dan lebar 100 mm seperti pada
gambar dibawah ini.
Gambar 3.3 Perancangan Rak
3.4Perancangan Perangkat Keras (Hardware)
Pada perancangan perangkat keras (hardware) prototype robot forklift ini,
dilakukan perancangan terhadap sistem kontrol elektronik yang meliputi
pembuatan rangkaian-rangkaian elektronik yang saling terintegrasi membentuk
suatu sistem kendali dengan tujuan mengendalikan sistem kerja prototype robot
3.4.1. Arduino Mega 2560
Penggunaan papan mikrokontroler arduino mega 2560 sebagai pusat kendali
yang menerima masukan dari perangkat input untuk kemudian mengeksekusi
perangkat output.
Gambar 3.4 Arduino Mega 2560
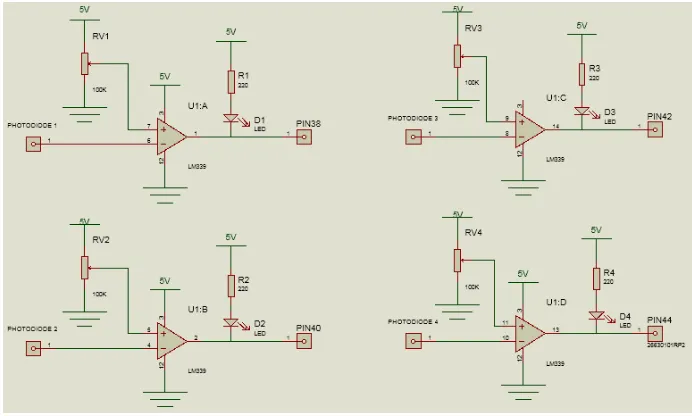
3.4.2. Rangkaian Photodioda dan Infrared
Pada Protoype robot forklift ini, penggunaan photodioda dan infrared
digunakan sebagai sensor untuk mendeteksi garis hitam sebagai jalur robot
bergerak. Berikut skematik rangkaian Infrared dan photodioda.
3.4.3. Rangkaian Komparator
Komparator yang digunakan pada perancangan prototype robot forklift ini
adalah IC lm339 yang berfungsi untuk menghasilkan output sinyal digital dari
output photodioda. Pada dasarnya jika Vin > Vref (tegangan output photodioda)
maka Vo = 1 (5V) atau Vo = VDD dan jika Vin < Vref (tegangan output
photodioda) maka Vo = 0 (0V) atau Vo = VEE. Pada perancangan robot ini
digunakan dua buah komparator IC lm339 dan penggunaan LED pada
komparator ini sebagai indikator output dari komparator jika output berlogika 1
maka LED akan menyala dan jika output berlogika 0 maka LED akan padam.
berikut rangkaian komparator lm339.
Gambar 3.6 Rangkaian Komparator
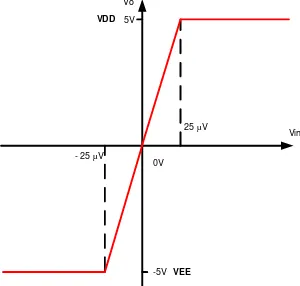
Dari rangkaian di atas dimana Vo = VDD = 5V, Vref = tegangan RV, Vin =
tegangan photodioda, dan penguatan tegangan A pada IC LM339 ini 200000
maka.
��+= �
��+= 5 200000
��+= 25 ��
��− = ��
��− = 200000−5
��− = − 25 ��
Jika Vref = 0 maka karakteristknya seperti gambar 3.7 berikut ini:
5V
-5V
VDD
VEE
Vo
Vin 25 µV
- 25 µV 0V
Gambar 3.7 Karakteristik komparator Vref = 0
Dan jika Vref = 4,58 V maka karakteristiknya seperti gambar 3.8 berikut ini:
5
VDD
VEE
Vo
Vin 4,58025 V 4,57975 V
4,58 V
Pada gambar di atas jika vin > 4,58025 V maka output dari komparator berlogika
1 atau 5 V dan jika Vin < 4,57975 maka output dari komparator berlogika 0 atau
0V . Jika di asumsikan Vref = 4,58 V dan Vin = 4,57 V maka penguatan
tegangan A yang terjadi adalah.
� = �(�� − �� )
� = �(4,58− 4,57)
� = �
(�� − �� )
� = 5
(4,58− 4,57)= 500 ���
3.4.4. Rangkaian Sensor Jarak Ultrasonik
Sensor jarak ultrasonik pada perancangan prototype robot forklift ini
digunakan sebagai pendeteksi rak yang kosong. Sensor ini akan mendeteksi rak
kosong jika jarak lebih dari rak isi dan mendeteksi rak isi kurang dari rak kosong.
Pada perancangan ini digunakan tiga bual sensor jarak ultrasonik dimana
ultrasonik 1 akan mendeteksi rak lantai 1, ultrasonik 2 akan mendeteksi rak lantai
2, dan ultrasonik 3 akan mendeteksi rak lantai 3.
3.4.5. Rangkaian Keypad
Dalam perancangan prototype robot forklif ini, digunakan keypad 4x4
yang digunakan sebagai komponen yang memfasilitasi operator/ user untuk
membererikan perintah tempat meyimpan barang pada robot dengan memasukan
kode rak melalui tombol-tombol pada keypad. Pembacaan input dari keypad 3x4
ini dilakukan dengan cara menggunkan proses scanning dimana setiap satu
tombol merupakan kombinasi antara jalur baris dan kolom.
Gambar 3.10 Rangkaian Keypad 4x4
3.4.6. Rangkaian Liquid Crystal Display (LCD)
Dalam perancangan prototype robot forklift pada tugas akhir ini,
digunakan Liquid Crystal Display (LCD) dengan jumlah karakter 16x2. Untuk
pengaturan tingkat kecerahan karakter pada LCD, dapat diakukan dengan cara
mengatur tegangan pada variabel resistor RV1. Mode pemrograman LCD dengan
Gambar 3.11 Rangkaian Liquid Crystal Display (LCD)
3.4.7. Rangkaian Light Dependent Resistor (LDR) Pendeteksi Warna Barang
Untuk mendeteksi warna digunakan LED sebagai pemancar cahaya dan
LDR sebagai penerima cahaya. LED akan memancarkan cahaya yang diarahkan
pada barang dihadapannya dimana cahaya tersebut akan terpantul dan diterima
oleh LDR kemudian di rubah kebesaran listrik. LDR dihubungkan dengan port
analog pada mikrokontroler PIN A8.
3.4.8. Rangkaian Driver Motor
Untuk menghubungkan motor dengan mikrokontroler digunakan IC
L293D sebagai driver motor. Hal ini dikarenakan arus yang keluar dari pin I/O
mikrokontroler memiliki arus rendah, sedangkan untuk menggerakan
bagian-bagian robot forklift ini dibutuhkan arus yang besar. Pada perancangan protype
robot forklift ini menggunakan 2 buah IC L293D karena 1 IC mengendalikan 2
motor dan pada perancangan ini terdapat 4 buah motor yang harus dikendalikan.
Gambar 3.13 Rangkaian driver motor
3.4.9. Rangkaian Limit Switch
Pada perancangan prototype robot forklift ini limit switch digunakan
sebagai pembatas gerakan garpuh. Limit switch depan digunakan untuk pembatas
saat garpuh bergerak maju, limit switch belakang digunakan untuk pembatas saat
garpuh bergerak mundur, limit switch awal digunakan untuk pembatas garpuh
pada posisi paling bawah, limit switch lantai 1 digunakan untuk pembatas garpuh
saat bergerak naik ketika akan menyimpan barang pada rak lantai 1, limit switch
lantai 2 digunakan untuk pembatas garpuh saat bergerak naik ketika akan
pembatas garpuh saat bergerak naik ketika akan menyimpan barang pada rak
lantai 3.
Gambar 3.14. Rangkaian Limit Switch
3.5Perancangan Perangkat Lunak (Software)
Perancangan perangkat lunak (software) bertujuan untuk menentukan setiap
alur eksekusi dari prototype robot forklift yang dirancang. Setiap masukan yang
diterima akan diatur oleh perangkat lunak yang selanjutnya akan diproses untuk
menentukan eksekusi pada bagian keluaran. Berikut adalah alur kinerja
(flowchart) dari sistem yang akan dirancang.
Start · Sensor ultra sonic = input · Kepad = input
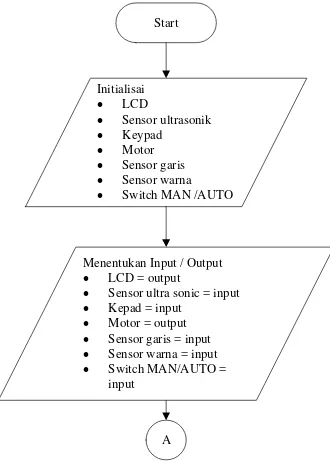
Pada gambar 3.15 merupakan diagram alir awal pada sistem prototype robot
forklift. Pada awal inisialisai komponen-komponen yang digunakan seperti LCD,
sensor ultrasonik, keypad, motor, sensor garis , sensor warna dan switch
MAN/AUTO. Kemudian akan di tentukan fungsi dari setiap komponen seperti
LCD dan motor akan berfungsi sebagai output, komponen lainnya seperti sensor
ultrasonik, keypad, sensor garis, sensor warna dan switch MAN/AUTO sebagai
Switch Manual
Sensor Kiri / Sensor Kanan Mendeteksi Garis
C
Sensor Kiri / Sensor Kanan Mendeteksi
Sensor Kiri / Sensor Kanan Mendeteksi Sensor Kiri / Sensor
Kanan Mendeteksi
Gambar 3.16 Diagram Robot Bekerja Secara Manual
Pada Gambar 3.16 merupakan diagram alir prototype robot forklift pada
mode manual. Pertama cek apakah switch MAN/AUTO pada posisi manual, Jika
tidak maka ke mode otomatis, jika ya maka mikrokontroler akan menunggu
mikrokontroler akan menampilkan kode rak pada LCD, kemudian cek apakah
kode sama dengan kode rak, Jika tidak maka software reset, jika ya maka lakukan
proses pengambilan barang.
Setelah proses tadi selesai maka robot bergerak mundur lurus, jika semua
sensor mendeteksi garis maka robot diam 1 detik lalu maju 2 detik kemudian
robot putar kiri atau kanan sesuai rak yang di tuju, jika tidak robot tetap mundur
lurus. Kemudian selama robot putar kiri atau kanan, cek sensor kiri atau kanan
jika sensor kiri atau kanan tidak mendeteksi garis robot tetap balik kiri atau kanan.
jika sensor kiri atau kanan mendeteksi garis maka lakukan proses robot berjalan
mengikuti garis. Cek apakah counter sesuai, apabila counter sesuai dengan rak
yang dituju maka robot akan putar kiri atau kanan sesuai rak yang dituju sampai
sensor kanan atau kiri mendeteksi garis. Jika sensor kiri atau kanan mendeteksi
garis maka lakukan proses robot berjalan mengikuti garis. Cek apakah counter
sesuai? apabila counter sesuai dengan rak yang dituju maka robot akan putar kiri
atau kanan sesuai rak yang dituju sampai sensor kanan atau kiri mendeteksi garis.
Jika barang akan disimpan pada rak lantai 3 maka motor penggerak garpuh naik
bergerak sampai limit switch 3 aktif kemudian robot melakukan proses maju
mengikuti garis sampai counter sesuai, Jika barang akan disimpan pada rak lantai
2 maka motor penggerak garpuh naik bergerak sampai limit switch 2 aktif
kemudian robot melakukan proses maju mengikuti garis sampai counter sesuai,
jika barang akan disimpan pada rak lantai satu maka robot langsung melakukan
proses maju mengikuti garis sampai counter sesuai. Jika counter sesuai maka
robot berhenti kemudian motor penggerak garpuh maju bergerak sampai limit
penggerak garpuh mundur bergerak sampai limit switch belakang aktif kemudian
motor penggerak garpuh turun bergerak sampai limit switch bawah aktif.
Setelah meletakan barang robot akan mundur lurus, jika semua sensor
garis tidak mendeteksi garis maka robot tetap mundur lurus, jika semua sensor
garis mendeteksi garis maka robot diam 1 detik lalu maju 2 detik kemudian putar
kiri atau kanan tergantung rak yang telah dituju sampai sensor kiri atau kanan
mendeteksi garis. Kemudian robot melakukan proses maju mengikuti garis. Cek
apakah counter sesuai? jika tidak robot tetap melakukan proses maju mengikuti
garis, jika ya maka robot akan balik kiri atau kanan sesuai rak yang telah dituju
sampai sensor garis kiri atau kanan mendeteksi garis kemudian robot akan
melakukan proses maju mengikuti garis. Cek apakah counter sesuai, jika tidak
robot tetap melakukan proses maju mengikuti garis, jika ya maka robot akan putar
kiri atau kanan sesuai rak yang telah dituju sampai sensor garis kiri atau kanan
mendeteksi garis kemudian robot akan melakukan proses maju mengikuti garis.
Lalu Cek apakah counter sesuai, jika tidak robot tetap melakukan proses maju
Switch
Sensor Kiri / Sensor Kanan Mendeteksi Garis
Sensor Kiri / Sensor Kanan Mendeteksi Garis
LCD Putih ADC < 170
Tampil
Lantai 1 kosong Lantai 2 kosong Lantai 3 Kosong
D
Sensor Kiri / Sensor Kanan Mendeteksi
Sensor Kiri / Sensor Kanan Mendeteksi Sensor Kiri / Sensor
Kanan Mendeteksi
Gambar 3.17 Diagram Alir Prototype Robot Forklift pada Mode Otomatis
Pada gambar 3.17 merupakan diagram alir prototype robot forklift pada
mode otomatis. Pertama cek apakah switch MAN/AUTO pada posisi otomatis,
Jika tidak maka mode manual, jika ya maka robot melakukan proses pengambilan
barang, kemudian cek apakah nilai ADC <170, Jika ya maka tampil LCD “Putih”,
jika tidak maka cek apakah nilai ADC >170<300, Jika ya maka tampil LCD
“Merah”, jika tidak maka cek apakah nilai ADC >300<400, Jika ya maka tampil
LCD “Hitam”, jika tidak maka cek apakah nilai ADC >400<700, Jika ya maka
tampil LCD “Biru”, jika tidak maka artinya warna tidak terdeteksi software reset.
Kemudian jika warna barang telah terdeteksi maka robot bergerak mundur
lurus, jika semua sensor mendeteksi garis maka robot diam 1 detik lalu maju 2
detik kemudian putar kiri atau kanan sesuai rak yang di tuju, jika tidak robot tetap
mundur lurus. Kemudian selama robot balik kiri atau kanan, cek sensor kiri atau
kanan jika sensor kiri atau kanan tidak mendeteksi garis robot tetap putar kiri atau
kanan. jika sensor kiri atau kanan mendeteksi garis maka lakukan proses robot
berjalan mengikuti garis. Cek apakah counter sesuai, apabila counter sesuai
dengan rak yang dituju maka robot akan putar kiri atau kanan sesuai rak yang
dituju sampai sensor kanan atau kiri mendeteksi garis. Jika sensor kiri atau kanan
mendeteksi garis maka lakukan proses robot berjalan mengikuti garis sambil
melakukan pengecekan kodisi rak. Jika terdeteksi rak kosong maka robot akan
putar kiri sampai sensor kanan atau kiri mendeteksi garis. Jika barang akan
disimpan pada rak lantai 3 maka motor penggerak garpuh naik bergerak sampai
limit switch 3 aktif kemudian robot melakukan proses maju mengikuti garis
sampai counter sesuai, Jika barang akan disimpan pada rak lantai 2 maka motor
penggerak garpuh naik bergerak sampai limit switch 2 aktif kemudian robot
melakukan proses maju mengikuti garis sampai counter sesuai, jika barang akan
disimpan pada rak lantai satu maka robot langsung melakukan proses maju
kemudian motor penggerak garpuh maju bergerak sampai limit switch depan aktif,
motor penggerak garpuh turun aktif selama 2 detik, lalu motor penggerak garpuh
mundur bergerak sampai limit switch belakang aktif kemudian motor penggerak
garpuh turun bergerak sampai limit switch bawah aktif.
Setelah meletakan barang robot akan mundur lurus, jika semua sensor
garis tidak mendeteksi garis maka robot tetap mundur lurus, jika semua sensor
garis mendeteksi garis maka robot diam 1 detik lalu maju 2 detik kemudian putar
kiri atau kanan tergantung rak yang telah dituju sampai sensor kiri atau kanan
mendeteksi garis. Kemudian robot melakukan proses maju mengikuti garis. Cek
apakah counter sesuai, jika tidak robot tetap melakukan proses maju mengikuti
garis, jika ya maka robot akan putar kiri atau kanan sesuai rak yang telah dituju
sampai sensor garis kiri atau kanan mendeteksi garis kemudian robot akan
melakukan proses maju mengikuti garis. Cek apakah counter sesuai? jika tidak
robot tetap melakukan proses maju mengikuti garis, jika ya maka robot akan putar
kiri atau kanan sesuai rak yang telah dituju sampai sensor garis kiri atau kanan
mendeteksi garis kemudian robot akan melakukan proses maju mengikuti garis.
Lalu Cek apakah counter sesuai, jika tidak robot tetap melakukan proses maju
62
PENGUJIAN DAN ANALISIS
Pada bab ini akan diuraikan mengenai proses pengujian dari sistem yang
dirancang. Dimana pengujian yang dilakukan meliputi pengukuran terhadap
parameter-parameter komponen input/masukan, proses dan output/keluaran yang
terdapat dalam sistem yang dirancang yang kemudian dilanjutkan dengan
menganalisis hasil-hasil pengukuran tersebut. Hal ini bertujuan untuk melihat
sistem yang dirancang berjalan sesuai dengan yang dirancang.
4.1.Pengujian dan Analisis Infrared dan Photodioda Pendeteksi Garis
Pengujian infrared dan photodioda pendeteksi garis ini bertujuan untuk
mendapatkan nilai output photodioda saat menerima cahaya infrared melalui
pantulan oleh garis lintasan warna hitam atau putih, dan mendapatkan nilai
referensi yang dibutuhkan sebagai nilai perbandingan rangkaian komparator
sehingga diharapkan mampu memperoleh nilai keluaran komparator sebagai
masukan bagi mikrokontroler. Berikut setup pengukuran tegangan referensi,
tegangan masukan dan tegangan keluaran IC LM339.
Vref
Vin
Volt Meter
Volt Meter LM339 Volt Meter
Vout
Gambar 4.1. Setup Pengukuran Tegangan Referensi,Tegangan Masukan
Keterangan:
Vref = tegangan keluaran trimpot
Vin = tegangan keluaran photodioda.
Hasil dari setup pengukuran pada gambar 4.1 ditunjukan pada tabel 4.1 berikut.
Tabel 4.1 Pengukuran Tegangan Pendeteksian Garis Lintasan
Pendeteksi garis
Tegangan Referensi
(Volt)
Tegangan Input (Volt) Tegangan Output(Volt) Vi1 Vi2 Garis tidak
Vi1 : tegangan input ketika mendeteksi warna putih
Vi2 : tegangan input ketika mendeteksi warna hitam
Vo1 : tegangan output ketika mendeteksi warna putih
Vo2 : tegangan output ketika mendeteksi warna hitam
Analisis table 4.1 :
Cara kerja dari pendeteksi garis dalam perancangan ini adalah jika nilai
referensi (Vref) lebih besar dari nilai keluaran photodioda (Vin) maka tegangan
keluaran ICLM339 berlogika “1” atau garis hitam terdeteksi dan jika nilai
referensi (Vref) lebih kecil dari nilai keluaran photodioda (Vin) maka tegangan
keluaran ICLM339 berlogika “0” atau garis hitam tidak terdeteksi. dari data hasil
![Gambar 2.24. Komparator Inverting [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1194729.774817/30.595.258.375.444.541/gambar-komparator-inverting.webp)
![Gambar 2.29 LCD 16x2 [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1194729.774817/33.595.229.397.159.242/gambar-lcd-x.webp)
![Gambar 2.30 keypad matriks 4x4 [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1194729.774817/34.595.249.378.140.214/gambar-keypad-matriks-x.webp)