ABSTRAK
APLIKASI PENGGUNAAN MIKROKONTROLER
UNTUK REGULASI SUHU, LEVEL AIR, DAN KELEMBABAN PADA SISTEM COCOK TANAM HIDROPONIK
Oleh
Baharuddin T.P. Marpaung
Indonesia merupakan negara agraris yang sebagian besar penduduknya bermata pencaharian di sektor pertanian. Sektor pertanian menjadi sangat penting, dimana laju pertumbuhan penduduk yang tinggi tidak seimbang dengan luas lahan pertanian yang sudah ada. Untuk mengatasi hal ini, perlu adanya suatu terobosan yaitu dengan meningkatkan hasil panen pertanian dengan lahan yang minimalis. Oleh karena itu, penggunaan sistem pertanian secara hidroponik sangat cocok digunakan untuk peningkatan efisiensi pertanian. Penggunaan sistem ini diharapkan peningkatan kualitas dan kuantitas hasil pertanian dapat tercapai.
Hidroponik yang selama ini digunakan perlu ditingkatkan lagi, yaitu dengan menggunakan sistem otomasi. Sistem otomasi hidroponik ini menggunakan Arduino Duemilanove sebagai mikrokontroler, DHT 11 dan soil moisture sensor sebagai sensor, dengan pompa dan kipas sebagai aktuator.
Penelitian ini diterapkan langsung pada hidroponik jenis flood and drain dengan dimensi 2,6m (panjang) X 1,8m (lebar) X 2m (tinggi). Sistem hidroponik ini sudah berjalan baik dengan error
6% kelembaban dan 4% temperatur pada sensor DHT 11.
ABSTRACT
APPLICATIONS USING MICROCONTROLLER
TO REGULATE TEMPERATURE, WATER LEVEL, AND HUMIDITY IN HYDROPONICS PLANTING SYSTEM
By
Baharuddin T.P. Marpaung
Indonesia is a predominantly agricultural country. The agricultural sector is very important, where high population growth rate is not balance to the growth rate of agricultural land. To overcome this, there are needs for a breakthrough to increase agricultural yields with minimal land. Therefore, the usage of hydroponic farming system is suitable to agricultural increase efficiency. This system is expected to increase the quality and quantity of agricultural products can be achieved.
Hydroponics has been improved by using automation system. This hydroponic automation system using Arduino Duemilanove as a microcontroller to regulate moisture and temperature, DHT 11 and soil moisture sensor as sensors, with pumps and fan as actuators.
This research is applied directly on the type of flood and drain hydroponics with dimension 2,6m (length) x 1.8m (width) x 2m (height). The hydroponic system has been running well with error 6% and 4% humidity temperature sensor DHT 11.
RIWAYAT HIDUP
Penulis dilahirkan di Natar tanggal 23 April 1988, sebagai anak ke tiga dari tiga bersaudara dari pasangan Bapak Anton Marpaung dan Ibu Pamelle Panjaitan.
Penulis menyelesaikan pendidikan Taman Kanak-kanak (TK) Tunas Harapan Desa Tanjung Sari pada tahun 1994, SD Negeri 1 Tanjung Sari Natar pada tahun 2000, SLTP Budi Mulia Kedaton pada tahun 2003, SMK Negeri 2 Bandar Lampung pada tahun 2006.
Pada tahun 2007 penulis terdaftar sebagai Mahasiswa Teknik Mesin Fakultas Teknik Universitas Lampung melalui Seleksi Penerimaan Mahasiswa Baru (SPMB). Selama menjadi mahasiswa, penulis menjadi pengurus HIMATEM (Himpunan Mahasiswa Teknik Mesin) sebagai anggota bidang penelitian.
Penulis juga melakukan Kerja Praktek (KP) di PT. Perkebunan Nusantara VII (PERSERO) Unit Usaha Rejosari (Pabrik Pengolahan Kelapa Sawit) dengan judul “Analisis Pengaruh Laju Aliran Massa Pada Horizontal Deaerator Tipe SSC terhadap Kinerja Boiler Atmindo di PT. Perkebunan Nusantara VII (Persero) Unit Usaha Rejosari”. Penulis mengambil konsentrasi Tugas Akhir pada bidang
Dengan kerendahan hati dan
penuh syukur terhadap anugrah-Nya
kupersembahkan skripsi ini untuk
Ayahanda dan Ibunda
Atas segala pengorbanan yang tak terbalaskan, kesabaran, keikhlasan,
doa, cinta dan kasih sayangnya
Kakak dan Adik
Sumber semangat, inspirasi, kebanggaan, motivasi yang tak
terpadamkan
Keluarga Besar Penulis
Terima kasih atas segala doa yang telah diberikan pada saya
Teman-teman Seperjuangan Penulis
Mesin ‘0
7
Selamanya saya ucapkan salam solidarity forever
Almamater tercinta
Hendaklah engkau setia sampai mati,
SANWACANA
Puji dan syukur penulis panjatkan kepada TUHAN YESUS KRISTUS, karena atas berkat dan anugrah-NYA skripsi yang berjudul ”Aplikasi Penggunaan Mikrokontroler Untuk Regulasi Suhu, Level Air, Dan Kelembaban Pada Sistem Cocok Tanam Hidroponik”, dapat terselesaikan. Skripsi ini merupakan salah satu syarat untuk memperoleh gelar sarjana Teknik Mesin di Universitas Lampung.
Pada kesempatan ini, penulis ingin menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
1. Bapak Prof. Dr. Suharno, M.Sc., Ph.D selaku Dekan Fakultas Teknik Universitas Lampung.
2. Ibu Dr. Shirley Savetlana, S.T., M.Met. selaku Ketua Jurusan Teknik Mesin Universitas Lampung.
penulisan skripsi ini.
5. Bapak Ahmad Yahya, S.T.,M.T. selaku Penguji pada seminar proposal dan seminar hasil serta pada sidang sarjana, yang telah memberikan masukan, saran, kritik dan nasihatnya.
6. Bapak Ir. Herry Wardono, M.Sc. selaku Pembimbing Akademik yang telah memberikan bimbingan dan pengarahan selama perkuliahan.
7. Seluruh Dosen Pengajar Jurusan Teknik Mesin yang telah banyak memberikan ilmu selama penulis melaksanakan studi, baik berupa materi perkuliahan maupun tauladan dan motivasi sehingga dapat di jadikan bekal untuk terjun ke tengah-tengah masyarakat.
8. Seluruh Staf Administrasi Jurusan Teknik Mesin yang telah banyak membantu penulis dalam menyelesaikan studi di jurusan Teknik Mesin.
9. Kedua Orangtua-ku, khususnya mama yang telah memberikan bimbingan moril maupun spiritual dan juga atas nasehat dan do’anya.
10.Kakak-kakak-ku (Abang Agustinus Marpaung, kakak Fransisca Marpaung, kakak Sarma Malau) tercinta yang telah memberikan dukungan, motivasi, dan semangat.
12.Teman-teman terbaik ku (dimas biji, mamang leo bella, bang sophan’s squad, bang beni maho, popot sutris, bang reza) yang telah membantu dalam menyelesaikan skripsi ini.
13.Rekan – rekan komunitas teknik mesin seluruh angkatan, semoga kebersamaan ini tetap terjaga hingga akhir hayat, “ Solidarity Forever ” serta semua pihat yang
tidak dapat disebutkan satu – persatu, terima kasih atas segala bantuannya.
Saya menyadari isi skripsi ini masih terdapat kekurangan dan belum sempurna, karena penulis hanya manusia biasa yang tak luput dari salah dan lupa. Maka penulis berharap adanya saran dan kritikan yang membangun demi perbaikan skripsi ini. Semoga skripsi ini dapat bermanfaat bagi penulis khususnya, dan bagi pembaca pada umumnya. Amin.
Bandar Lampung, 18 Desember 2014 Penulis,
DAFTAR ISI
Halaman
DAFTAR ISI ... i
DAFTAR TABEL ... iv
DAFTAR GAMBAR ... v
I. PENDAHULUAN A. Latar Belakang ... 1
B. Tujuan Penelitan ... 2
C. Batasan masalah ... 3
D. Sistematika Penulisan ... 3
II. TINJAUAN PUSTAKA A. Hidroponik ... 5
1. Jenis Hidroponik ... 6
2. Media Tanam Hidroponik ... 12
3. Keunggulan dan Kelemahan hidroponik ... 17
4. Perkembangan Hidroponik ... 18
B. Otomasi ... 19
C. Sistem Kontrol ... 24
D. Mikrokontroler ... 25
1. Pengertian Mikrokontroler ... 25
ii
D. Pelaksanaan Penelitian ... 45
E. Prosedur Penelitian ... 46
1. Pembuatan Reservoir Hidroponik ... 53
2. Pembuatan Dudukan Hidroponik ... 54
3. Pembuatan Chamber Hidroponik ... 54
4. Pembuatan Pelindung Hidroponik ... 55
5. Assembly Mesin Penyokong Tanaman Hidroponik ... 57
B. Pengujian Sistem Hidroponik ... 59
1. Pengujian Arduino ... 59
2. Pengujian Sprinkler ... 63
4. Hasil Pengujian Sistem Hidroponik... 66
V. SIMPULAN DAN SARAN
A. Simpulan ... 89 B. Saran ... 89
DAFTAR PUSTAKA
DAFTAR TABEL
Tabel
Halaman
1.
Jadwal Kegiatan Penelitian ... 39
2.
Spesifikasi Pompa
Sprinkler
...
42
3.
Spesifikasi Pompa Level ... 42
4.
Spesifikasi
Reservoir
... 42
5.
Daftar Harga Alat Dan Bahan ... 43
6.
Pengukuran Tegangan Arduino-Relay ... 65
7.
Data Pengukuran
Hygrometer
Dan Termometer ... 70
DAFTAR GAMBAR
10. Lightweight Expanded Clay Aggregate (LECA) ... 14
11. Pasir ... 15
12. Serbuk Kayu ... 16
13. Gravel (Kerikil) ... 16
14. Brick Shards (Pecahan Bata) ... 17
15. Diagram Blok Sistem Kontrol ... 20
16. Diagram Blok Pengendali Feedback ... 23
17. Diagram Blok Pengendali Feedforward ... 23
18. Blok Diagram I/O Untuk Konfigurasi Sistem Inferential ... 24
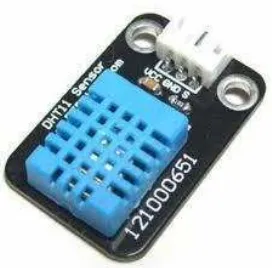
19. Sensor Suhu Dan Kelembaban DHT 11 ... 31
20. Soil Moisture Sensor ... 33
21. Arduino Duemilanove 328 ... 34
vi
23. Aktuator Jenis Katup ... 36
24. Aktuator Jenis Silinder ... 37
25. Motor Servo (DC) ... 37
26. Relay ... 38
27. Diagram Alir (Flow Chart) Penelitian... 45
28. Loop Otomasi Hidroponik Untuk Pengaturan Ketinggian Air ... 46
29. Loop Otomasi Hidroponik Untuk Pengaturan Suhu ... 46
30. Loop Otomasi Hidroponik Untuk Pengaturan Kelembaban ... 47
31. Desain Hidroponik Tampak Depan ... 47
32. Desain Hidroponik Tampak Belakang ... 48
33. Bejana Dan Besi Penopang ... 53
39. Uji Coba Pemasangan Jaring Pelindung ... 56
40. Perekat ... 57
41. Pompa Nutrisi ... 58
42. Kipas ... 58
43. Pompa Kelembaban ... 59
44. Coding Serial Monitor Arduino-LDR ... 60
45. Hasil Uji coba LDR ... 61
46. Coding Arduino-LDR Dengan Set Point ... 62
47. Sprinkler ... 63
48. Hasil Pengujian Jangkauan Sprinkler ... 64
49. Voltage Adapter ... 64
50. Hasil Uji Coba 1 Sistem Hidroponik ... 66
51. Hasil Uji Coba 2 Sistem Hidroponik ... 69
53. Hasil Pengambilan Data Langsung Hygrometer Dan Termometer System
Hidroponik ... 76
54. Data Gabungan ... 77
55. Siklus Pompa Hidroponik (Kran Tertutup Penuh) ... 79
56. Siklus Pompa Hidroponik (Kran ½ Tertutup) ... 80
57. Siklus Pompa Hidroponik (Air Reservoir Atas Habis) ... 81
58. Pompa Hidroponik (Pompa Air Hidup)... 82
59. Siklus Pompa Hidroponik (Pompa Air Mati) ... 83
60. Siklus Pompa Hidroponik (Pompa Air Hidup Dan Reservoir ½ Terisi) ... 84
61. Siklus Pompa Hidroponik (Pompa Air Hidup, Air Reservoir Habis, Dan Buzzer Hidup) ... 85
62. Grafik Siklus Hidup Mati Pompa Hidroponik ... 86
63. Letak sensor (tampak depan) ... 87
I. PENDAHULUAN
A. Latar Belakang
Indonesia merupakan negara agraris yang sebagian besar penduduknya bermata pencaharian di sektor pertanian. Sektor pertanian menjadi sangat penting, di mana laju pertumbuhan penduduk yang tinggi tidak seimbang dengan luas lahan pertanian yang sudah ada. Untuk mengatasi hal ini, perlu adanya suatu terobosan yaitu dengan meningkatkan hasil panen pertanian dengan lahan yang minimalis. Khususnya di daerah perkotaan, pemanfaatan lahan kosong seperti atap gedung, lantai basement, gudang yang tidak terpakai dapat dimaksimalkan peruntukannya sebagai lahan pertanian yaitu dengan sistem pertanian secara hidroponik (Sibarani, 2005).
Sistem pertanian secara hidroponik yaitu sistem pertanian yang memanfaatkan air langsung sebagai media nutrisi (nutrient) tanpa menggunakan tanah sebagai media tanam. Penggunaan tanah sebagai media tanam dapat digantikan dengan media tanam yang lain seperti pasir, pecahan batu bata, sabut kelapa, busa, rockwool, dll (Lingga, 1984). Sifat alami dari tanaman akan tetap tumbuh dengan
peningkatan kualitas dan kuantitas hasil pertanian dapat tercapai. Penggunaan sistem ini di Indonesia masih kurang dikarenakan masih banyak masyarakat yang belum tahu dengan jelas bagaimana cara melakukan dan keuntungan-keuntungan yang diperoleh dengan menggunakan sistem ini terlebih pengembangannya. Penggunaan sistem pertanian secara hidroponik di negara maju khususnya di negara-negara dengan tingkat populasi penduduk yang tinggi sudah dilakukan oleh individu sebagai hobi dan juga secara besar-besaran untuk tujuan komersil (Istiqomah, 2013).
Pemanfaatan otomasi untuk sistem pertanian secara hidroponik yang sudah ada perlu diperbaiki lagi agar kinerja dari sistem ini lebih baik lagi. Contohnya, belum dipakainya kontrol untuk menghidupmatikan pompa yang digunakan untuk mengalirkan air pada sistem hidroponik. Hal ini menyebabkan pompa hidup terus menerus dan mengakibatkan penggunaan listrik yang berlebihan pada sistem hidroponik. Oleh karena itu, penulis sangat tertarik untuk melakukan penelitian dengan judul “APLIKASI PENGGUNAAN MIKROKONTROLER UNTUK REGULASI SUHU, LEVEL AIR, DAN KELEMBABAN PADA SISTEM COCOK TANAM HIDROPONIK”.
B. Tujuan Penelitian
3
C. Batasan Masalah
Batasan masalah dalam penelitian ini adalah sebagai berikut:
1. Penelitian pada pengaturan level air, suhu, kelembaban, kontrol aktuator dari hidroponik sendiri.
2. Penerapan sistem otomasi menggunakan hidroponik dengan jenis flood and drain.
3. Pengontrolan aktuator menggunakan Arduino Duemilanove.
D. Sistematika Penulisan
Adapun sistematika penulisan dari penelitian ini adalah sebagai berikut :
BAB I : PENDAHULUAN
Bab ini terdiri dari latar belakang, tujuan, batasan masalah, dan sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Pada bab ini memuat teori mengenai hal-hal yang berkaitan dengan penelitian ini.
BAB III : METODOLOGI PENELITIAN
BAB IV : HASIL DAN PEMBAHASAN
Pada bab ini berisikan hasil dan pembahasan dari data-data yang diperoleh saat pengujian dilaksanakan.
BAB V : SIMPULAN DAN SARAN
Pada bab ini berisi hal-hal yang dapat disimpulkan dan saran-saran yang ingin disampaikan dari penelitian ini.
DAFTAR PUSTAKA
Memuat referensi yang digunakan penulis untuk menyelesaikan laporan tugas akhir.
LAMPIRAN
Berisikan hal-hal yang mendukung proses penelitian.
II. TINJAUAN PUSTAKA
A. Hidroponik
tanam di dalam bedengan pasir yang terletak di tepi sungai. Cara bercocok
tanam seperti ini dikenal dengan istilah “River Bed Cultivation”.
Istilah hidroponik lahir sekitar tahun 1936, sebagai penghargaan yang diberikan kepada DR. WF. Gericke, seorang agronomis dari Universitas California. DR. WF. Gericke melakukan percobaan dan penelitian dengan menanam tomat di dalam bak yang berisi mineral sehingga tomat tersebut mampu bertahan hidup dan dapat tumbuh sampai ketinggian 300 cm dan memiliki buah yang lebat. Sebelumnya beberapa ahli patologis tanaman juga melakukan percobaaan dan penelitian untuk dapat melakukan bercocok tanam tanpa media tanah sebagai media tanam, sehingga pada masa itu bermunculan istilah-istilah: “Nutri Culture”, “Water Culture”, ”Gravel Bed Culture”, dan istilah “Soilless Culture” (Roberto, 2003).
1. Jenis Hidroponik
Adapun jenis-jenis hidoponik yang sering digunakan yaitu: a. Nutrient Film Technique (NFT)
7
kecukupan pasokan air, oksigen dan nutrisi. Kelemahan dari NFT adalah bahwa NTF ini memiliki gangguan dalam aliran, misalnya, pemadaman listrik. Prinsip dasar dalam sistem NFT merupakan suatu keuntungan dalam pertanian konvensional. Artinya, pada kondisi air berlebih, jumlah oksigen diperakaran menjadi tidak memadai. Namun, pada sistem NFT yang nutrisinya hanya selapis menyebabkan ketersediaan nutrisi dan oksigen pada akar selalu berlimpah. Untuk membuat selapis nutisi, dibutuhkan syarat-syarat sebagai berikut:
1. Kemiringan talang tempat mengalirnya larutan nutrisi ke bawah harus benar-benar seragam.
2. Kecepatan aliran yang masuk tidak boleh terlalu cepat, disesuaikan dengan kemiringan talang (Lingga, 1984).
Gambar 1. Nutrient Film Technique (NFT) (Farmtech-Mart. 2013)
b. Drip-Irrigation atau Micro-Irrigation
Drip-Irrigation, juga dikenal sebagai irigasi tetes atau irigasi mikro
9
menggunakan gaya gravitasi dalam penyaluran air dari sumber (Sibarani, 2005).
Gambar 2. Drip-Irrigation (Diystart. 2013)
c. Aeroponics
Aeroponics adalah proses tumbuh tanaman di lingkungan udara atau
kabut tanpa menggunakan tanah atau media agregat (dikenal sebagai geoponics). Kata "aeroponics" berasal dari makna Yunani aero
tanaman menjuntai dan batang bawah dengan solusi dikabutkan atau disemprot air kaya nutrisi (Wikipedia, 2013).
Gambar 3. Aeroponics (Farmxchange. 2013)
d. Deep Water Culture (DWC)
Deep Water Culture (DWC) adalah salah satu metode hidroponik
yang memproduksi tanaman dengan cara menggantungkan akar tanaman ke dalam larutan kaya nutrisi, air beroksigen (Wikipedia, 2013).
11
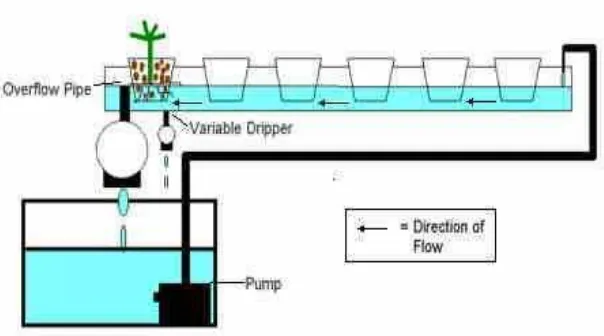
e. Flood & Drain (Ebb and Flow)
Ebb and flow merupakan suatu bentuk hidroponik yang dikenal karena kesederhanaan, kehandalan operasi dan biaya investasi awal yang rendah. Pot diisi dengan media inert yang tidak berfungsi seperti tanah atau berkontribusi nutrisi untuk tanaman tapi yang jangkar akar dan berfungsi sebagai cadangan sementara air dan pelarut nutrisi mineral (Wikipedia, 2013).
Gambar 5. Flood and Drain (Dbcourt. 2013)
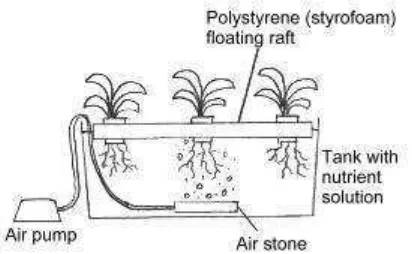
f. Floating Raft (Rakit apung)
Pada sistem rakit apung, tanaman ditempatkan pada stereofoam yang diapungkan pada sebuah kolam. Kolam sedalam 40 cm tersebut berisi nutrisi. Sistem ini perlu ditambahkan airstone ataupun aerator. Aerator berfungsi menghasilkan oksigen untuk pertukaran udara
ditanami oleh tumbuhan yang memiliki bobot rendah (Randys Hydroponics, 2010).
Gambar 6. Floating Raft (Thehydroponicum. 2013)
2. Media Tanam Hidroponik
Beberapa media tanam yang digunakan pada hidroponik yaitu: a. Rockwool
Rockwool dibuat dengan melelehkan kombinasi batu dan pasir dan
13
Gambar 7. Rockwool (Insulation Manufacturing. 2013)
b. Coconut Coir (sabut kelapa)
Coconut Coir dikenal juga sebagai coco peat adalah bahan sisa setelah
serat telah dihapus dari kulit terluarnya dari kelapa. Coconut Coir bersimbiosis dengan jamur Trichoderma, yang berfungsi sebagai melindungi akar dan merangsang pertumbuhan akar.
Gambar 8. Coco Peat (Grow Organic. 2013)
c. Perlite
ukuran yang sama. Perlite merupakan perpaduan dari granit, obsidian, batu apung dan basalt. Batu vulkanik ini secara alami menyatu pada suhu tinggi mengalami apa yang disebut "Metamorfosis Fusionic".
Gambar 9. Perlite (Perlite. 2013)
d. Lightweight Expanded Clay Aggregate (LECA)
LECA adalah shell (cangkang) keramik ringan dengan inti sarang lebah yang diproduksi dengan menembakkan tanah liat alami untuk suhu dari 1100-1200°C dalam tungku berputar. Pelet dibulatkan dalam bentuk dan jatuh dari tempat pembakaran di kelas sekitar 0-32 mm dengan kepadatan rata-rata curah kering sekitar 350 kg/m³. Bahan tersebut disaring menjadi beberapa kelas yang berbeda sesuai aplikasi (Roberto, 2003).
15
e. Pasir
Pasir sering digunakan sebagai media tanam alternatif untuk menggantikan fungsi tanah. Sejauh ini, pasir dianggap memadai dan sesuai jika digunakan sebagai media untuk penyemaian benih, pertumbuhan bibit tanaman, dan perakaran setek batang tanaman. Bobot pasir yang cukup berat akan mempermudah tegaknya setek batang. Selain itu, keunggulan media tanam pasir adalah kemudahan dalam penggunaan dan dapat meningkatkan sistem aerasi serta drainase media tanam.
Gambar 11. Pasir (Wm-Site. 2013)
f. Wood fibre (serbuk kayu)
Gambar 12. Serbuk kayu (Archiproducts. 2013)
g. Gravel (kerikil)
Jenis yang sama yang digunakan dalam akuarium, kerikil dapat digunakan, asalkan dicuci terlebih dahulu. Memang, tanaman yang tumbuh di tempat yang beralaskan kerikil dengan air beredar menggunakan power head pompa listrik, yang pada dasarnya sedang tumbuh hidroponik menggunakan kerikil. Kerikil murah, mudah untuk dibersihkan, saluran air yang baik dan tidak akan menjadi basah kuyup. Namun, kerikil juga berat, dan jika sistem tidak menyediakan air terus menerus, akar tanaman dapat mengering.
17
h. Brick shards (pecahan bata)
Pecahan bata memiliki sifat yang mirip dengan kerikil. Mereka memiliki kelemahan tambahan mungkin mengubah pH dan memerlukan pembersihan ekstra sebelum digunakan kembali (Roberto, 2003).
Gambar 14. Brick shards (pecahan bata)
(Informed Farmers. 2013)
3. Keunggulan dan Kelemahan Hidroponik
Adapun beberapa keunggulan dan kelemahan penggunaan sistem hidroponik yaitu:
a. Keunggulan Hidroponik
1. Tanah tidak diperlukan untuk hidroponik.
2. Air tetap dalam sistem dan dapat digunakan kembali dengan demikian, biaya air rendah.
3. Pengontrolan kadar nutrisi secara keseluruhan dengan demikian, biaya untuk ini rendah.
5. Stabil dan hasilnya tinggi.
6. Hama dan penyakit lebih mudah untuk disingkirkan dari pada penggunaan tanah karena mobilitas dari penggunaan wadah pada hidroponik.
7. Lebih mudah dalam proses pemanenan. 8. Tidak adanya penggunaan pestisida.
b.Kelemahan Hidroponik
Tanpa tanah sebagai penyangga, kegagalan untuk sistem hidroponik menyebabkan kematian tanaman yang cepat. Kelemahan lainnya termasuk serangan patogen seperti karena layu oleh Verticillium disebabkan oleh tingkat kelembaban tinggi yang terkait dengan hidroponik dan berbasis penyiraman lebih dari pada tanaman tanah. Juga, tanaman hidroponik banyak membutuhkan pupuk yang berbeda untuk setiap tanaman yang berbeda (Triutami, 2011).
4. Perkembangan Hidroponik
Sejak ditemukannya hidroponik pada tahun 600 SM oleh Bangsa Babylonia, hidroponik juga mengalami pengembangan. Pengembangan hidroponik
dilakukan oleh Bangsa Cina dengan menerapkan “Taman Terapung” dan
oleh Bangsa Mesir dengan memanfaatkan aliran Sungai Nil dengan
membangun bedengan pasir yang dikenal dengan istilah “River Bed
19
kehidupan tanaman pada hidroponik itu sendiri. Seperti yang dilakukan oleh saudari Diansari, 2008 dari Universitas Indonesia dengan judul “Pengaturan Suhu, Kelembaban, Waktu Pemberian Nutrisi Dan Waktu Pembuangan Air Untuk Pola Cocok Tanam Hidroponik Berbasis Mikrokontroler AVR ATMEGA 8538”. Konsep yang telah diterapkan ini masih belum sempurna karena pemodelan tidak diterapkan langsung ke hidroponik sesungguhnya, pada sensor ketinggian air menggunakan timer pada sistem hidroponik yang diterapkan dan penghematan air yang masih kecil. Oleh sebab itu, dengan dilakukannya penelitian lanjutan ini diharapkan efisiensi dari hidroponik sendiri dapat meningkat.
B. Otomasi
Otomasi memiliki tujuan memberikan kemudahan, meningkatkan efektifitas kerja sistem dan meningkatkan jaminan keselamatan kepada para operator. Cara kerja pada sistem pengendalian otomatis sama dengan kerja sistem pengendalian manual. Sistem yang dirancang melakukan empat fungsi pengendalian yaitu mengatur, membandingkan, menghitung dan mengkoreksi. Perbedaan yang ada yaitu pada pengoperasian sistem, dimana sistem pengendalian otomatis tidak lagi dikerjakan oleh operator, tetapi sepenuhnya dikerjakan oleh sebuah controller yang merupakan bagian dari DCS (Distributed Control System).
Sistem
INPUT OUTPUT
R(s) C(s)
Gambar 15. Diagram blok sistem kontrol (Martinus, 2010).
Diagram di atas menunjukan diagram model matematis suatu sistem.
R(s) = sebagai input C(s) = sebagai output
G(s) = hubungan input dan output dari sistem.
Ada beberapa alasan dalam penggunaan sistem otomasi antara lain sebagai berikut:
21
a. Meningkatkan produktifitas perusahaan
Peningkatan produktifitas ini ditandai dengan lebih besarnya output per jam-orang apabila sistem otomasi manufaktur diterapkan.
b. Tingginya biaya tenaga kerja
Kecenderungan meningkatnya biaya kerja di dunia industri mendorong pengusaha untuk menginvestasikan fasilitas otomasi yang relatif mahal. Sistem otomasi dapat meningkatkan laju produksi menyebabkan harga perproduk lebih rendah.
c. Kurangnya tenaga kerja untuk kemampuan tertentu
Ini juga akibat dari industri pelayanan sehingga semakin sulit untuk mendapatkan tenaga kerja dengan skill tertentu. Dengan sistem otomasi manufaktur, jumlah dan kemampuan yang dibutuhkan untuk menghasilkan produk berkualitas lebih rendah.
d. Tenaga kerja cenderung berpindah ke sektor pelayanan.
Kecenderungan di negara maju khususnya Amerika Serikat, di mana tenaga kerja lebih menyukai sektor pelayanan.
e. Keamanan
Dengan otomasi manufaktur pekerjaan lebih aman, artinya keamanan akibat kecelakaan kerja saat operasi produksi ataupun perpindahan operator pada saat produksi lebih terjamin.
f. Tingginya harga bahan baku
g. Meningkatkan kualitas produk.
Otomasi tidak hanya dapat menghasilkan produk pada laju yang lebih cepat, tetapi juga dapat meningkatkan kualitas produk dibandingkan dengan menggunakan metode manual.
h. Menurunkan Manufacturing Lead Time (LTM)
Dengan otomasi manufaktur dapat mengurangi waktu antara pesanan pelanggan sampai pengiriman produk. Dengan demikian pelayanan terhadap pelanggan dapat lebih kompetitif.
Terdapat tiga elemen dasar yang menjadi syarat mutlak bagi sistem otomasi yaitu: power, program of instruction dan kontrol sistem yang semuanya mendukung proses dari sistem otomasi tersebut. Ada tiga tipe konfigurasi pengendalian, antara lain:
a. Feedback control configuration
Konfigurasi ini mengukur secara langsung variabel yang dikendalikan untuk mengatur harga variabel yang dimanipulasi. Tujuan pengendalian ini yaitu mempertahankan variabel kendali pada level yang diinginkan.
23
Gambar 16. Diagram blok
Gambar 16. Diagram blok pengendali feedback (Martinus, 2010).
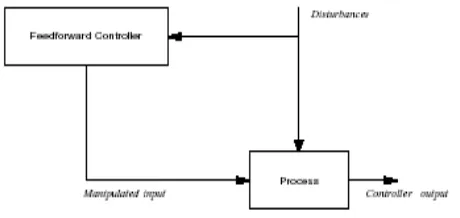
b. Feedforward control configuration
Konfigurasi sistem pengendali feedforward memanfaatkan pengukuran langsung pada disturbance untuk mengatur harga variabel yang akan dimanipulasi.Tujuan pengendalian adalah mempertahankan variable output yang dikendalikan pada nilai yang diharapkan.
Gambar 17. Diagram blok pengendali feedforward ( TBC 4/4/2009, 4/3/2011).
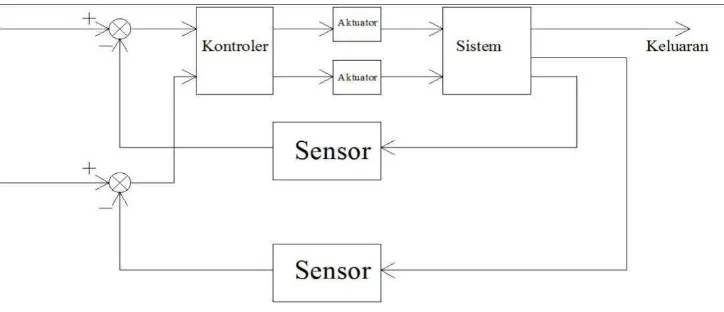
c. Inferential Control Configuration
output yang akan dikendalikan tidak dapat diukur secara langsung. Tujuan
pengendalian ini adalah mempertahankan variabel unmeasured output tersebut pada harga yang ditetapkan pada set point.
Gambar 18. Blok diagram I/O untuk konfigurasi sistem inferential (Martinus, 2010).
C. Sistem Kontrol
25
Setiap toilet memiliki mekanisme kontrol untuk mengisi ulang tangki air dengan pengisian sesuai dengan kapasitas dari tangki tersebut. Mekanisme sistem kontrol tersebut menggunakan peralatan mekanis.
AC atau air conditioner merupakan sistem otomasi yang menggunakan sistem kontrol mikroelektronik atau yang sering disebut komputer sederhana.
Robot assembly contoh sistem otomasi yang menggunakan kontrol sistem
komputer atau sejenisnya. Sistem kontrol tersebut akan memberikan pengaturan pada gerakan-gerakan tertentu untuk menyusun suatu peralatan pada industri.
D. Mikrokontroler
1. Pengertian Mikrokontroler
Mikrokontroler adalah salah satu bagian dasar dari suatu sistem komputer. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen– elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan output spesifik berdasarkan input-an yang diterima dan program yang dikerjakan.
komputer untuk melakukan jalinan yang panjang dari aksi–aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer (Susanto, 1998).
2. Konsep Mikrokontroler
Seperti yang telah dijelaskan pada sub-bab sebelumnya, bahwa mikrokontroler adalah satu diantara dari bagian dasar dari suatu sistem komputer. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen–elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan output spesifik berdasarkan inputan yang diterima dan program yang dikerjakan. Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan instruksi-instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan
jalinan yang panjang dari aksi – aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer. Berikut adalah penjelasan mengenai konsep mikrokontroler:
a. Sistem Input Komputer
27
mikrokontroler umumnya menggunakan piranti input yang jauh lebih kecil seperti saklar atau keypad kecil. Hampir semua input mikrokontroler hanya dapat memproses sinyal input digital dengan tegangan yang sama dengan tegangan logika dari sumber. Level nol disebut dengan VSS dan tegangan positif sumber (VDD) umumnya adalah 5 volt. Padahal dalam dunia nyata terdapat banyak sinyal analog atau sinyal dengan tegangan level yang bervariasi. Karena itu ada piranti input yang mengkonversikan sinyal analog menjadi sinyal digital sehingga komputer bisa mengerti dan menggunakannya. Ada beberapa mikrokontroler yang dilengkapi dengan piranti konversi ini, yang disebut dengan ADC, dalam satu rangkaian terpadu.
b. Sistem Output Komputer
c. CPU (Central Processing Unit)
CPU adalah otak dari sistem komputer. Pekerjaan utama dari CPU adalah mengerjakan program yang terdiri atas instruksi – instruksi yang diprogram oleh programmer. Suatu program komputer akan menginstruksikan CPU untuk membaca informasi dari piranti input, membaca informasi dari dan menulis informasi ke memory, dan untuk menulis informasi ke output. Dalam mikrokontroler umumnya hanya ada satu program yang bekerja dalam suatu aplikasi. CPU M68HC05 mengenali hanya 60 instruksi yang berbeda. Karena itu sistem komputer ini sangat cocok dijadikan model untuk mempelajari dasar dari operasi computer karena dimungkinkan untuk menelaah setiap operasi yang dikerjakan.
d. Clock dan Memori Komputer
29
RAM digunakan sebagai tempat penyimpan data sementara dan hasil kalkulasi selama proses operasi. Beberapa mikrokontroler mengikutsertakan tipe lain dari memori seperti EPROM (Erasable Programmable Read Only Memory) dan EEPROM (Electrically Erasable Programmable Read Only Memory).
e. Program Komputer
Program digambarkan sebagai awan karena sebenarnya program adalah hasil imajinasi seorang programmer. Komponen utama dari program adalah instruksi-instruksi dari instruksi set CPU. Program disimpan dalam memori dalam sistem komputer di mana mereka dapat secara berurutan dikerjakan oleh CPU.
f. Sistem Mikrokontroler
E. Sensor
Sensor adalah suatu alat yang merubah dari besaran fisika menjadi besaran listrik. Suhu merupakan suatu besaran, karena dapat diukur, dipantau dan dapat digunakan dalam hampir setiap sistem fisik. Besaran itu harus dapat diwakili nilainya secara efisien dan akurat agar dapat dimanfaatkan dengan baik.
Pada dasarnya ada dua cara untuk mewakili nilai besaran tersebut, yaitu secara digital dan analog. Dalam perwakilan analog, suatu besaran diwakili oleh
besaran yang lain yang sebanding lurus dengan besaran yang pertama itu. Kata analog dapat diartikan sebagai sejalan. Contohnya adalah termometer air raksa. Pada saat suhu yang diukur berubah, tinggi air raksa dalam pipa kapiler pada termometer itu juga berubah mengikuti perubahan suhu tersebut. Karakteristik dari besaran analog yang penting yaitu berubah dalam rentang nilai yang berkesinambungan (continuous). Dalam perwakilan digital, besaran bukan diwakili oleh besaran lain yang sebanding, melainkan oleh lambang yang disebut angka atau digit, Perwakilan digital berlawanan dengan analog. Jika dalam analog nilai berubah secara sinambung, maka dalam digital nilai berubah secara diskrit.
1. Sensor Suhu dan Kelembaban
31
8 bit. Sensor ini termasuk elemen resistif dan perangkat pengukur suhu NTC. Memiliki kualitas yang sangat baik, respon cepat, kemampuan anti-gangguan dan keuntungan biaya tinggi kinerja.
Setiap sensor DHT11 memiliki fitur kalibrasi sangat akurat dari kelembaban ruang kalibrasi. Koefisien kalibrasi yang disimpan dalam memori program, sensor internal mendeteksi sinyal dalam proses, kita harus menyebutnya koefisien kalibrasi. Sistem antarmuka tunggal-kabel serial terintegrasi untuk menjadi cepat dan mudah. Kecil ukuran, daya rendah, sinyal transmisi jarak hingga 20 meter, sehingga berbagai aplikasi dan bahkan aplikasi yang paling menuntut. Produk ini 4-pin pin baris paket tunggal. Koneksi nyaman, paket khusus dapat diberikan sesuai dengan kebutuhan pengguna.
Berikut spesifikasi dari DHT 11:
• Pasokan Voltage: 5 V
• Rentang temperatur :0-50 °C kesalahan ± 2 °C
• Kelembaban :20-90% RH ± 5% RH error
• Interface: Digital
2. Soil Moisture Sensor
Sensor ini kelembaban dapat membaca jumlah kadar air dalam tanah di sekitarnya. Ini adalah sensor berteknologi rendah, tapi ideal untuk memantau taman kota, atau ketinggian air tanaman peliharaan. Sensor ini menggunakan dua pemeriksaan untuk melewati arus melalui tanah, dan kemudian membaca resistensi untuk mendapatkan tingkat kelembaban. Lebih banyak air membuat tanah menghantarkan listrik lebih mudah (resistensi kurang), sedangkan tanah kering melakukan listrik buruk (lebih tahan).
Spesifikasi:
33
Gambar 20. Soil Moisture Sensor (Kedai Robot. 2013)
3. Arduino Duemilanove 328
DF ROBOT ARDUINO USB Microcontroller ( ATMEGA 328) adalah suatu mikrokontroler pada ATMEGA 328 yang mempunyai 14 input/output digital yang mana 6 pin digunakan sebagai PWM keluaran, 6 masukan analog, dan didalamnya terdapat16 MHZ osilator kristal, USB koneksi,
power, ICSP, dan tombol reset. Kinerja arduino ini memerlukan dukungan mikrokontroler; dengan menghubungkannya pada suatu komputer dengan USB kabel untuk menghidupkannya menggunakan arus AC atau DC dan bisa juga dengan menggunakan baterai.
Kelebihan-kelebihan yang dimiliki Arduino Duemilanove 328 adalah : 1. Menggunakan Chip tunggal ATMEGA328.
2. DFRDUINO mikrokontroler modul dengan USB koneksi.
3. Memakai I/O sederhana serta platform yang mengijinkan untuk menghubungkannya dengan sensor dan pengontrol.
4. Kompatibel dengan bahasa program C dan Arduino.
Berikut spesifikasi dari Arduino Duemilanove: 1. 14 pin digital
2. 6 pin analog
3. Input 5V yang diatur dan 3.3V pin keluaran 4. Tx/Rx pin komunikasi serial
Gambar 21. Arduino Duemilanove 328
F. Aktuator
1. Pengertian Aktuator
Aktuator adalah bagian keluaran untuk mengubah energi suplai menjadi energi kerja yang dimanfaatkan. Sinyal keluaran dikontrol oleh sistem kontrol dan aktuator bertanggung jawab pada sinyal kontrol melalui elemen kontrol terakhir. Jenis lain dari bagian keluaran digunakan untuk mengindikasi status kontrol sistem. Aktuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan
35
Untuk meningkatkan tenaga mekanik, aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroler. Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya. Aktuator adalah sebuah peralatan mekanis untuk menggerakkan atau mengontrol sebuah sistem yang biasa digunakan sebagai proses lanjutan dari keluaran suatu proses olah data yang dihasilkan oleh suatu sensor atau kontroler (Amirin, 2013).
2. Jenis Aktuator
Adapun jenis-jenis dari aktuator sendiri, yaitu: A.Solenoid
Solenoid merupakan aktuator yang terdiri dari koil atau gulungan kawat, inti besi sebagai piston gerak linier, dan pegas sebagai pemegang inti besi. Ketika tegangan masuk pada koil sehingga terjadi aliran arus maka koil akan berubah menjadi bidang magnet sehigga akan menarik inti besi ke dalam koil sampai menuju titik tengah koil. Saat tegangan dimatikan makan posisi inti besi akan kembali seperti semula karena tarikan dari pegas.
B. Katup
Katup adalah peralatan yang berfungsi untuk mengatur aliran fluida sebagai penggerak aktuator. Katup banyak digunakan pada industri ataupun transportasi.
Katup memiliki berbagai macam jenis antara lain: Katup ¾, katup 5/2 dsb. Penggerak katup memiliki berbagai jenis, antara lain: Penggerak manual (tuas, knop, pedal, dll), penggerak magnet/solenoid, udara, dll).
Gambar 23. Aktuator jenis katup (Wikipedia, 2013).
C. Silinder
37
Gambar 24. Aktuator jenis silinder (Stoneleigh-Eng. 2013)
D.Motor Listrik
Motor listrik terdiri dari rotor (bagian yang bergerak), stator (bagian yang diam). Pada stator terdapat inti magnet, sedangkan pada stator terdapat koil yang berfungsi sebagai magnet listik apabila dialirkan arus. Motor diklasifikasikan menjadi dua jenis yaitu AC (arus searah) dan DC (arus bolak balik) (Amirin. 2009).
Gambar 25. Motor servo (DC) (Robotshop. 2013)
E. Relay
Sifat kemagnetan pada logam ferromagnetis akan tetap ada selama pada kumparan yang melilitinya teraliri arus listrik. Sebaliknya, sifat kemagnetannya akan hilang jika suplai arus listrik ke lilitan diputuskan.
III. METODE PENELITIAN
A. Pelaksanaan Penelitian a. Tempat Penelitian
Penelitian dilakukan di Jalan Arif Rachman Hakim, Gg. Kya’i Haji Ahmad Thobari No.6, Bandar Lampung.
b. Waktu Penelitian
Perancangan, pembuatan alat dan pengambilan data dilaksanakan pada bulan September hingga November 2013, dengan jadwal pelaksanaan tersusun dalam tabel 1 berikut ini:
Tabel 1. Jadwal Kegiatan Penelitian
No Nama Kegiatan
September Oktober November
1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 Persiapan
a. Studi Literatur b. Perancangan 2 Pembelian Alat 3 Pembuatan
6 Analisis Data 7 Pembuatan Laporan
B. Alat Dan Bahan 1. Alat
Beberapa alat yang digunakan dalam penelitian ini adalah sebagai berikut:
A. Bor listrik
Bor listrik digunakan untuk membuat lubang pada pipa PVC pada hidroponik.
B. Solder listrik
Solder listrik digunakan untuk menempelkan timah pada papan PCB dan rangkaian elektronik lainnya.
C. Bread board
Bread board digunakan sebagai tempat percobaan sebelum rangkaian.
D. Aktuator
Aktuator adalah alat yang digunakan sebagai penggerak dalam rangkaian elektronika,dalam penelitian ini aktuator yang digunakan ialah pompa 2 buah dan fan.
E. Gergaji besi
41
F. Gergaji kayu
Alat ini digunakan untuk memotong kayu untuk landasan pipa PVC.
G. Meteran
Alat ini untuk mengukur pada pembuatan hidroponik. H. Lem pipa
Alat ini digunakan untuk melekatkan antara sambungan pipa (knee) dan pipa.
2. Bahan
Beberapa bahan yang digunakan pada penelitian ini adalah: A. Arduino Duemilanove 328
B. Pipa PVC C. Resistor D. Kabel
E. DHT 11 (temperature and humidity sensor) F. Gelas plastik
G. Soil moisture sensor (sensor basah) H. Reservoir
I. Besi dudukan reservoir
3. Spesifikasi alat dan bahan
Tabel 2. Spesifikasi Pompa Sprinkler
Merk SAN-EI model SE-125A
(tipe sentrifugal)
Kapasitas maksimum : 42L/menit Tinggi dorong : 28 meter Tinggi hisap : 9 meter Pipa : 1” X 1” Tegangan : 220 V Frekuensi : 50 Hz Daya masukan : 230 W PPM : 2850 Daya keluaran : 125 W Instalasi Lilitan Kelas : B Kapasitor : 6µF/450V Suhu Cairan Maksimum : 35ºC
Tabel 3. Spesifikasi Pompa Level
Merk
AQUARIES A-104
Tipe Super Submersible Pump
Kapasitas maksimum : 2000L/Jam Tinggi maksimum : 2 Meter
Tegangan : 220 VAC Frekuensi : 50 Hz
Daya masukan : 40 W
Tabel 4. Spesifikasi Reservoir
43
4. Daftar Harga Alat Dan Bahan
Pada tabel 5 berikut adalah daftar harga alat dan bahan yang digunakan pada penelitian ini, yaitu:
Tabel 5. Daftar Harga Alat Dan Bahan
No Nama Barang Unit Harga Satuan
1 Pipa PVC 4”x 4meter 2 Rp 170.000,- Rp 360.000,-
2 Pipa PVC 1/2”x 4meter 1 Rp 80.000,- Rp 80.000,-
3 Arduino Duemilanove 1 Rp 340.000,- Rp 340.000,-
4 Kabel telepon 4meter 1 Rp 12.000,- Rp 12.000,-
5 DHT 11 (temperature and humidity sensor)
1 Rp 75.000,- Rp 75.000,-
6 Tutup pipa PVC 8 Rp 8.000,- Rp 64.000,-
7 Pompa air aquarium 1 Rp 150.000,- Rp 150.000,-
8 Fan 1 Rp 110.000,- Rp 110.000,-
9 Pompa sentrifugal 1 Rp 300.000,- Rp 300.000,-
10 Reservoir 2 Rp 120.000,- Rp 240.000,-
11 Besi dudukan reservoir 5 Rp 75.000,- Rp 375.000,-
C. Diagram Alir (Flow Chart)
GAGAL
BERHASIL MULAI
STUDI LITERATUR
DESAIN HIDROPONIK DAN SISTEM OTOMASI
PEMBUATAN HIDROPONIK
PEMBUATAN SISTEM ELEKTRONIKA DAN
SISTEM OTOMASI
PENGUJIAN
PENGAMATAN
TROUBLE SHOOTING
ANALISA DAN PEMBAHASAN
45
Gambar 27. Diagram Alir (Flow Chart) Penelitian
D.Pelaksanaan Penelitian
Best practice pembuatan otomasi untuk cocok tanam hidroponik ini, yaitu: 1. Sifat air, karena air memiliki sifat mengalir dari tempat yang tinggi menuju
ke tempat yang rendah pada sistem hidroponik menggunakan 2 reservoir yang memanfaatkan laju aliran alami dari air.
2. Penentuan batas ketinggian air dengan memanfaatkan sensor basah (soil moisture sensor). Sensor basah ini memanfaatkan perbandingan antara water resistance (resistansi air) dan air resistance (resistansi udara).
3. Penentuan temperatur yang cocok pada tanaman. Pengaturan temperatur sangat penting, karena kenaikan temperatur mempengaruhi respirasi tanaman. Akan tetapi, kenaikan temperatur ini sangat berbahaya terhadap tanaman apabila tidak dikontrol.
4. Penentuan batas waktu habis nutrisi pada air yang digunakan pada sistem hidroponik.
E.Prosedur Penelitian
Adapun prosedur penelitian yang akan dilakukan adalah sebagai berikut:
1. Pembuatan Desain
Pembuatan desain merupakan tahap dasar untuk merencanakan pembuatan benda kerja yang akan dibuat. Adapun desain yang akan dibuat di sini meliputi desain pembuatan loop sistem otomasi dan desain untuk hidroponik meliputi desain reservoir dan tempat media tanam hidroponik itu sendiri.
1) Desain sistem loop otomasi
LEVEL SET POINT
Gambar 28. Loop Otomasi Hidroponik Untuk Pengaturan Ketinggian Air
TEMPERATURE SET POINT
Gambar 29. Loop Otomasi Hidroponik Untuk Pengaturan Suhu KONTROLER RELAY FAN SISTEM UDARA
KONTROLER RELAY POMPA
47
HUMIDITY SET POINT
Gambar 30. Loop Otomasi Hidroponik Untuk Pengaturan Kelembaban
2) Desain hidroponik
Pada proses ini, hidroponik dirancang menggunakan 2 reservoir sebagai tempat penampung air nutrient (pupuk cair) yang nantinya level airnya diatur oleh pompa. Desain hidroponik tersebut dapat dilihat pada gambar 31 dan 32, sebagai berikut:
Gambar 31. Tampak Depan Desain Hidroponik
KONTROLER RELAY POMPA KELEMBABAN PERUBAHAN
HUMIDITY SENSOR
SISTEM KELEMBABAN
Gambar 32. Tampak Belakang Desain Hidroponik
Desain hidroponik ini aliran airnya disusun secara seri. Dimana air mengalir secara berantai dari lubang pertama sampai lubang terakhir pada chamber hidroponik.
3. Pembuatan Benda Kerja
Pembuatan benda kerja ini meliputi dua tahap, yaitu:
1) Pembuatan perangkat keras (hardware)
49
perangkat mekanis yaitu meliputi pembuatan hidroponik dari desain yang telah dibuat.
2) Pembuatan perangkat lunak (software)
Tahap ini mencakup semua hal yang berkaitan dengan perangkat lunak bagi sistem. Perangkat lunak (software) yang digunakan pada Tugas Akhir ini dibuat menggunakan bahasa pemrograman C dengan target mikrokontroler arduino duemilanove. Bahasa C merupakan perangkat lunak yang menjadi bagian dari sistem yang berupa program yang mengatur kerja dari mikrokontroler arduino duemilanove dan keseluruhan perangkat keras (hardware) yang dihubungkan dengan mikrokontroler arduino duemilanove. Langkah-langkah pembuatan program tersebut adalah sebagai berikut:
a) Membuat loop sistem kontrol (flowchart) dari program yang akan dibuat.
b) Membuat program menggunakan pemrograman C dengan referensi diagram blok dari sistem kontrol yang akan dibuat.
c) Mengkompilasi program yang telah dibuat sampai tidak terjadi kesalahan.
4. Pengujian sistem otomasi
Pengujian sistem otomasi ini dilakukan ketika semua tahap pembuatan hardware maupun software telah selesai. Pengujian ini dilakukan dengan
tujuan untuk mengetahui kesalahan yang terjadi dari pembuatan yang telah dilakukan. Seperti yang telah diketahui pembuatan dari sistem otomasi ini terdapat dua bagian yaitu hardware dan software. Pengujian hardware yang akan dilakukan yaitu menguji rangkaian elektronika dengan memastikan bahwa rangkaian tersebut telah terhubung satu sama lain sehingga pompa, fan bekerja dengan baik. Setelah tahap pengujian hardware selesai, maka selanjutnya dilakukan pengujian software.
Pengujian ini diperlukan ketelitian yang tinggi, hal itu dikarenakan pembuatan software ini mengacu pada pembuatan listing program berdasarkan logika yang telah diterjemahkan. Jika dari pengujian yang dilakukan terdapat kesalahan maka perlu dilakukan troubleshooting untuk mengetahui kesalahan dari sistem otomasi tersebut. Kemudian setelah diketahui kesalahannya maka dilakukan perbaikan dari kesalahan tersebut sampai sistem berjalan dengan baik sesuai dengan prosedur yang diinginkan.
Pengujian sistem otomasi ini merupakan indikator tingkat keberhasilan sistem hidroponik yang telah dibuat. Suatu sistem hidroponik dikatakan berhasil jika pompa level air, pompa sprinkler dan fan setelah dikontrol
oleh mikrokontroler berjalan dengan baik. Dikatakan “berjalan dengan
51
batasan-batasan (syarat-syarat) yang harus dipenuhi oleh sistem otomasi sebagai pengganti tugas operator (manusia).
Set point (batasan) yang digunakan pada sistem hidroponik adalah:
Ketinggian air ditetapkan berdasarkan peletakan sensor basah. Jadi, pada kedua reservoir di dalamnya diletakan sensor basah yang bekerja berdasarkan hubungan antara elektroda-elektroda yang terdapat pada sensor tersebut. Arus listrik yang terdapat pada elektroda-elektroda tersebut dihubungkan oleh air yang menyentuhnya. Arus listrik yang mengalir memberikan sinyal kepada kontroler untuk menghidupkan pompa yang terdapat pada reservoir bawah. Air dipompakan menuju reservoir atas, di sini juga terdapat sensor basah. Jika air pada reservoir atas menyentuh sensor basah tersebut, maka sensor basah tersebut memberikan sinyal kepada kontroler untuk mematikan pompa level.
pengganti aerator. Hal ini bertujuan agar tanaman harus mempunyai suplai oksigen yang cukup untuk tumbuh kembang tanaman.
Set point yang digunakan untuk relative humidity (RH) yaitu
<80%. Saat RH di bawah 80% sistem menghidupkan pompa sprinkler untuk menaikan kelembaban udara di sekitar tanaman hidroponik dan saat RH di atas 80% sistem mematikan pompa sprinkler untuk menurunkan kelembaban udara tanaman
hidroponik.
Set point yang digunakan bisa diatur via software arduino.
V. SIMPULAN DAN SARAN
A. Simpulan
Berdasarkan pengujian yang telah dilakukan serta diperolehnya data-data dari hasil pengujian yang kemudian dibahas dalam pembahasan, maka didapatkan beberapa kesimpulan sebagai berikut:
1. Aplikasi penggunaan mikrokontroler untuk regulasi suhu, level air dan kelembaban pada sistem cocok tanam hidroponik sudah berhasil dan berjalan dengan baik.
2. Setelah dilakukan pengolahan data temperatur dan kelembaban diperoleh error sebesar 6% dan 4%.
3. Sistem bekerja dengan baik untuk mengatasi perubahan cuaca.
4. Kelembaban dan temperatur pada sistem ini bisa diatur sesuai kebutuhan.
B. Saran
1. Perlu adanya penelitian lebih lanjut tentang penggunaan sensor yang lebih baik dari DHT 11 dengan memakai DHT 21 atau DHT 22 atau memakai sensor temperatur dan kelembaban yang terpisah.
2. Perlu adanya penelitian lebih lanjut tentang pengaplikasian penggunaan mikrokontroler dalam bidang lainnya.
3. Penempatan sensor sebaiknya diperhatikan lagi, agar mendapatkan data yang lebih baik.
DAFTAR PUSTAKA
Amirin. 2009. Dasar-Dasar Mekatronika. Akses Oktober 2013. http://www.scribd.com/doc/17429886/Dasar-Mekatronika-by-AmirinkingYahoocoId.
Arciproducts. 2013. Wood Fibre. Akses Oktober 2013.
http://www.archiproducts.com/en/products/78350/wood-fibre
Blogspot. 2012. Berbagai Keuntungan Hidroponik. Akses September 2013.
http://shyro-group.blogspot.com/2012/06/berbagai-keunggulan-hidroponik.html.
Botanicare. 2011. Nutrient Film Technique. Akses September 2013.
http://www.botanicare.com/Nutrient-Film-Technique-NFT-W60.aspx. Buildipedia. 2013. LECA.Akses Oktober 2013.
http://buildipedia.com/aec-pros/construction-materials-and-methods/leca-masonry
Dbcourt. 2013. Flood and drain.Akses Oktober 2013. http://www.dbcourt.co.uk/hydroponics/
Diansari, M. 2008. Pengaturan Suhu, Kelembaban, Waktu Pemberian Nutrisi dan Waktu Pembuangan Air untuk Pola Cocok Tanam Hidroponik Berbasis Mikrokontroler AVR ATMEGA 8535. Skripsi Program Sarjana Jurusan Teknik Elektro – Fakultas Teknik, Universitas Indonesia. Depok.
Diystart. 2013. Drip irrigation. Akses Oktober 2013.
http://www.diystart.com/irrigation/drip-irrigation-system-installation
Farmtech-mart. 2013. Nutrient Film Technique (NFT). Akses Oktober 2013. http://www.farmtech-mart.com/hydroponic
Hydroponicist. 2013. Deep water culture. Akses Oktober 2013.
http://www.hydroponicist.com/hydroponic-systems/dwc-bubbler.htm Insulationmanufacturing.2013. Rockwool. Akses Oktober 2013.
http://www.insulationmanufacturing.com/rock-wool-mattress/ Istiqomah, S. 2013. Menanam hidroponik. Ganeca Exact.
Kedai robot. 2013. DHT 11. Akses Oktober 2013.
http://kedairobot.com/sensor/50-dht11-temperature-and-humidity-sensor.html Kedai robot. 2013. Moisture Sensor. Akses Oktober 2013.
http://kedairobot.com/sensor/118-soil-moisture-sensor-arduino-compatible.html
Lingga, P. 1984. Hidroponik: Bercocok Tanam Tanpa Tanah. Surabaya : Niaga Swadaya.
Martinus. 2010. Modul Pembelajaran Mekatronika. Jurusan Teknik Mesin – Fakultas Teknik Universitas Lampung. Bandar Lampung.
Martinus. 2012. Modul Pembelajaran Teknik Tenaga Listrik dan Elektronika. Jurusan Teknik Mesin – Fakultas Teknik Universitas Lampung. Bandar Lampung. Panggabean, FM. 2013. Irigasi Tetes. Unduh September 2013.
http://repository.usu.ac.id/bitstream/123456789/19349/4/Chapter%20II.pdf.
Randys Hydroponics. 2010. Floating rafts. Akses September 2013. http://www.randyshydroponics.com/html/floating_raft.html.
Roberto, K. 2003. How To Hydroponics 4th Edition. New York : The Futuregarden Press.
Robotshop. 2013. Motor servo. Akses Oktober 2013.
http://www.robotshop.com/ca/en/hitec-hs-5585mh-servo-motor.html Sibarani, S. M. 2005. Analisis Sistem Irigasi Hidroponik NFT pada Budidaya
Siongboon. 2013. Relay. Akses Oktober 2013.
http://www.siongboon.com/projects/2006-06-19_switch/
Stoneleigh. 2013. Pneumatic Actuator. Akses Oktober 2013. http://www.stoneleigh-eng.com/pneumatic_actuators.html
Sutanto, H.1998. Konsep Mikrokontroler. Akses Agustus 2013. http://mikrokontroler.tripod.com/6805/bab1.htm.
Thehydroponicum. 2013.Floating Raft. Akses Oktober 2013.
http://www.thehydroponicum.com/page.php/15/Hydroponic_growing_systems.h tml
Triutami, T. 2011. Keunggulan Dan Kelemahan Hidroponik . Akses September 2014 https://tiaratriutami.wordpress.com/2011/05/24/pengenalan-bercocok-tanam secara-hidroponik-pada-petani-untuk-meningkatkan-kualitas-dan-kuantitas- hasil-pertanian/
Wikipedia. 2013. Aeroponics. Akses Oktober 2013. http://en.wikipedia.org/wiki/Aeroponics.
Wikipedia. 2013. Ebb and Flow. Akses Oktober 2013. http://en.wikipedia.org/wiki/Ebb_and_flow. Wikipedia. 2013. Gravel. Akses Oktober 2013.
http://en.wikipedia.org/wiki/Gravel
Wikipedia. 2013. Wood fibre. Akses Oktober 2013. http://en.wikipedia.org/wiki/Wood_fibre. Wm-Site. 2013. Pasir.Akses Oktober 2013.